Изобретение относится к устройству защиты от объемной перегрузки конвейерной ленты трубчатого конвейера, содержащего расположенный между загрузочным и разгрузочным участками средний участок, конвейерная лента которого свернута по существу в трубчатую форму под действием роликов, установленных с возможностью вращения на роликовых опорных узлах в виде правильного многогранника. Изобретение также относится к освобождающему опорному узлу для указанного трубчатого конвейера.
Известно, что перегрузка ленты трубчатых конвейеров предотвращается благодаря равновесию между внутренними силами в конвейерной ленте и силами, создаваемыми транспортируемым материалом, которые зависят, в частности, от объемной плотности, угла естественного откоса и уплотняемости транспортируемого материала. Если конвейерная лента будет перегружена, она не будет сворачиваться в трубу с круглым поперечным сечением, а будет выпучиваться перед первым роликовым опорным узлом. Такое выпучивание приводит к нарушению заданного контура свернутой конвейерной ленты. В результате возникают избыточные напряжения в роликовых опорных узлах, обеспечивающих сворачивание конвейерной ленты в трубчатую форму на транспортирующей ветви. Если перегрузка не будет вовремя обнаружена, сопротивление конвейерной ленты при её прохождении через роликовые опорные узлы резко возрастает, что может привести даже к самопроизвольной остановке трубчатого конвейера.
Чтобы устранить указанные эффекты на транспортирующей ветви устанавливают освобождающие опорные узлы. Наиболее распространенная конструкция освобождающих опорных узлов включает в себя неподвижную раму, на которой установлена отклоняемая рама. Ролики, установленные на неподвижной раме, поддерживают конвейерную ленту снизу, а на отклоняемой раме закреплены верхние ролики. Отклоняемая рама соединена с неподвижной рамой так, чтобы оставаться неподвижной, когда нагрузка не превышает расчетную. Однако при возникновении «выпучивания» конвейерной ленты из-за чрезмерной объемной загрузки, силы, действующие на освобождающий опорный узел, возрастают. В результате фиксация нарушается, и отклоняемая рама наклоняется в направлении перемещения конвейерной ленты. Это приводит к увеличению зазора между роликами, и оператор должен остановить конвейерную ленту, открыть её и удалить избыточный транспортируемый материал.
Блокирующее устройство для фиксации отклоняемой рамы в наиболее простом виде представляет собой полосу, прикрепленную к неподвижной раме, на которой установлена отклоняемая рама. При возрастании сил, действующих на отклоняемую раму, полоса изгибается, позволяя отклоняемой раме наклониться. После удаления избыточного транспортируемого материала отклоняемая рама снова возвращается в свое положение рядом с неподвижной рамой, и деформированную полосу заменяют новой. Это решение является простым и относительно надежным. Однако с точки зрения обеспечения бесперебойной работы, оно является весьма неблагоприятным, поскольку все погнутые полосы должны заменяться вручную.
Более подходящим является блокирующее устройство, в котором используется отключающая защёлка, соединенная с пружиной, предпочтительно, регулируемой жесткости. При воздействии нормальных рабочих нагрузок, действующих на освобождающий опорный узел, отклоняемая рама остается закрепленной в исходном положении относительно неподвижной рамы. В случае возрастания усилий из-за выпучивания конвейерной ленты, защелка открывается, и отклоняемая рама, как и в предыдущем примере, отклоняется от своего вертикального положения. После удаления избыточного транспортируемого материала, отклоняемую раму можно снова переместить в исходное положение. Разъединяющую силу защелки можно регулировать в зависимости от жесткости ленты и физических характеристик транспортируемого материала.
Несмотря на определенные преимущества, оба описанных типа освобождающих опорных узлов обладают и недостатком, заключающимся в том, что эти опорные узлы могут реагировать только на непосредственное механическое воздействие от объемно-перегруженной конвейерной ленты. Это неблагоприятно, поскольку при таком механизме могут возникать повреждения начальных участков трубчатого конвейера.
Известны устройства, которые, в отличие от работающих по механическому принципу вышеупомянутых освобождающих опорных узлов, получают информацию о чрезмерном заполнении конвейерной ленты и передают сигналы посредством электрических или электромеханических средств. Работа этих устройств основана на обнаружении деформации конвейерной ленты.
Одно из таких электромеханических устройств (CN 204355697) содержит три датчика касания, установленных вокруг внешней поверхности свернутой конвейерной ленты в зазорах между парами роликов на одном опорном узле. Эти датчики соединены с переключателями, которые при нажатии на указанные датчики касания выдают сигнал, что происходит в ситуациях, когда конвейерная лента деформируется до недопустимой формы.
В другом устройстве (JPH 10181841) обнаружение деформации конвейерной ленты происходит посредством трех верхних роликов одного и того же опорного узла, установленных на отклоняемых кронштейнах, на которые оказывает давление внешняя сторона конвейерной ленты. С кронштейнами соединены переключатели, работа которых аналогична работе выключателей в предыдущем примере.
Еще одно устройство (KR 20040081822) содержит петлю, расположенную под свернутой конвейерной лентой и ориентированную в направлении перемещения конвейерной ленты. На этой петле установлены две поджатые одна к другой втулки, каждая из которых оснащена тремя роликами. При деформации конвейерной ленты втулки раздвигаются, и их перемещение передается на переключатель, сигнал которого выполняет такую же функцию, как и в вышеописанных устройствах.
Преимущество электромагнитных устройств известной конструкции заключается в том, что сигналы от датчиков могут использоваться для потенциального контроля всего трубчатого конвейера, но их основным недостатком является то, что, как и механические устройства, они реагируют только на состояние объемного переполнения транспортерной ленты.
Известно также устройство без каких-либо подвижных механических частей. В этом устройстве (EP 2128049) в конвейерную ленту в плоскости, перпендикулярной направлению её движения, завулканизированы постоянные магниты, что обеспечивает образование электромагнитного поля. На опорах расположены бесконтактные датчики, сигналы от которых обрабатываются в вычислительном блоке. В результате получают информацию о форме конвейерной ленты, как относительно деформации из-за объемной перегрузки, так и относительно деформации из-за поворота ленты. Преимущество этого устройства, в котором отсутствуют механические части, склонные к погрешностям, например, из-за формы сенсорных кнопок, ослабляется недостатком, общим для всех вышеупомянутых устройств. Этот недостаток заключается в том, что все эти устройства реагируют только на уже возникшее состояние неисправности.
Указанный недостаток по существу устраняется устройством защиты конвейерной ленты от объемной перегрузки трубчатого конвейера согласно изобретению. Трубчатый конвейер содержит средний участок, расположенный между загрузочным и разгрузным участками. На среднем участке транспортирующей ветви конвейерная лента свернута по существу в трубчатую форму под действием роликов, установленных в виде правильного многогранника на роликовых опорных узлах. За загрузочным участком расположен измерительный опорный узел, включающий в себя неподвижную раму и поворотную раму, способную поворачиваться относительно неподвижной рамы. Перемещение поворотной рамы ограничено половиной пространства, расположенного за поворотной рамой в направлении движения конвейерной ленты. На неподвижной раме в пространстве под горизонтальной поперечной осью свернутой конвейерной ленты установлены нижние ролики, а на поворотной раме над горизонтальной поперечной осью свернутой конвейерной ленты установлены верхние наклонные ролики. Измерительный опорный узел также содержит динамометр, непрерывно измеряющий силы, передаваемые от конвейерной ленты. Динамометр может передавать на блок управления сигнал об этих силах. Блок управления содержит компаратор, способный непрерывно сравнивать текущие величины сил с заданной максимально допустимой их величиной. Аналогичным образом, компаратор способен посылать сигнал отключения на привод конвейерной ленты и на блокирующее устройство. Блокирующее устройство выполнено с возможностью блокировать поворотную раму относительно неподвижной рамы при движении конвейерной ленты и освобождать поворотную раму при получении сигнала отключения.
Преимущество такого устройства заключается в измерении сил реакции от нагрузки в течение всего периода перемещения конвейерной ленты, а не в измерении деформации конвейерной ленты, при этом информация относительно величины сил нагрузки доступна постоянно. Кроме того, информация об объемной перегрузке является доступной непосредственно сразу после загрузочного участка, особенно если измерительный опорный узел расположен первым после загрузочного участка в направлении движения конвейерной ленты.
Заданное значение сил нагрузки может подаваться в компаратор в виде постоянной величины. Однако предпочтительно, чтобы заданное значение сил нагрузки представляло собой среднее арифметическое предыдущих значений сил нагрузки, действовавших на неперегруженную конвейерную ленту во время её работы. В результате, например, будут учитываться изменения физических характеристик конвейерной ленты из-за её старения. Преимуществом является также то, что информация о силах нагрузки доступна постоянно, как при стабильном перемещении конвейерной ленты, так и при её объемной перегрузке. Таким образом, устройство согласно изобретению обладает способностью к самообучению.
Важным элементом устройства является динамометр, который может иметь различные конструкции. В соответствии с первой группой динамометров поворотная рама поворачивается на неподвижной раме относительно горизонтальной оси, расположенной над конвейерной лентой в направлении перпендикулярном направлению её движения, при этом динамометр включает в себя весочувствительный элемент, прикрепленный к по меньшей мере одному верхнему ролику из пространства над горизонтальной поперечной осью свернутой конвейерной ленты.
В качестве альтернативы в первой группе динамометров, поворотная рама состоит из двух секций, каждая из которых шарнирно установлено на неподвижной раме с возможностью независимого отклонения на расстояние равное половине пространства, расположенного за поворотной рамой в направлении движения конвейерной ленты. На каждой секции установлен верхний наклонный ролик, а на неподвижной раме установлен верхний горизонтальный ролик. Динамометр содержит весочувствительный элемент, прикрепленный к по меньшей мере одному верхнему ролику из пространства над горизонтальной поперечной осью свернутой конвейерной ленты.
Во второй группе динамометров, измерительный опорный узел содержит по меньшей мере один весочувствительный элемент, установленный на неподвижной раме в месте её соединения с поворотной рамой и способный измерять осевые силы, передаваемые от конвейерной ленты на измерительный опорный узел.
В третьей группе динамометров между неподвижной и поворотной рамами установлена скользящая рама, способная скользить в неподвижной раме в вертикальном направлении, при этом поворотная рама способна поворачиваться на скользящей раме относительно горизонтальной оси, расположенной над конвейерной лентой перпендикулярно направлению её движения. Между неподвижной и скользящей рамами установлен весочувствительный элемент, измеряющий силы, действующие в направлении вертикального перемещения скользящей рамы.
Для короткого трубчатого конвейера достаточно одного измерительного опорного узла для удаления избыточного материала, когда конвейер перегружен. Но для длинного трубчатого конвейера, отличающегося большой инерцией движения, полезно размещать по меньшей мере один освобождающий опорный узел за измерительным опорным узлом и перед обычным опорным узлом.
Освобождающий опорный узел содержит фиксированную раму, отклоняемую раму и блокирующие устройства, ролики, окружающие свернутую в трубчатую форму конвейерную ленту, и отклоняемую раму, удерживаемую фиксированной рамой. Над поперечной осью свернутой конвейерной ленты установлены верхние наклонные ролики и верхний горизонтальный ролик. Под поперечной осью свернутой конвейерной ленты установлены нижние наклонные ролики и нижний горизонтальный ролик. Во время движения свернутой конвейерной ленты отклоняемая рама способна отклоняться от своего исходного положения на расстояние, равное половине пространства, расположенного за освобождающим опорным узлом, так что отклоняемая рама в исходном положении перпендикулярна продольной оси свернутой конвейерной ленты, а в наклонном положении зазор между роликами больше, чем в исходном положении.
Блокирующее устройство способно блокировать отклоняемую раму в исходном положении относительно фиксированной рамы при движении конвейерной ленты и освобождать отклоняемую раму при получении сигнала отключения от блока управления. В освобожденном состоянии отклоняемая рама способна поворачиваться на расстояние, равное половине пространства, расположенного за отклоняемой рамой в направлении движения конвейерной ленты, так что в наклонном положении отклоняемой рамы зазор между роликами больше, чем в исходном блокированном положении.
В другом варианте выполнения отклоняемая рама состоит из двух зеркальных секций, симметричных относительно оси симметрии, перпендикулярной продольной оси свернутой конвейерной ленты. Каждая секция способна поворачиваться у своей внешней кромки посредством шарнира, ось вращения которого ориентирована в диапазоне от вертикального направления до горизонтального. На внутренней кромке каждой секции установлен верхний наклонный ролик. Верхний горизонтальный ролик, так же, как и нижний ролик, установлен на фиксированной раме. Каждая из секций содержит блокирующее устройство, способное удерживать его в исходном положении прижатым к фиксированной раме и освобождать его при повороте в наклонное положение.
Преимущество освобождающего опорного узла согласно изобретению заключается в том, что физически проще удалить избыточный материал с объемно-перегруженной конвейерной ленты по сравнению известными конструкциями.
Изобретение поясняется чертежами.
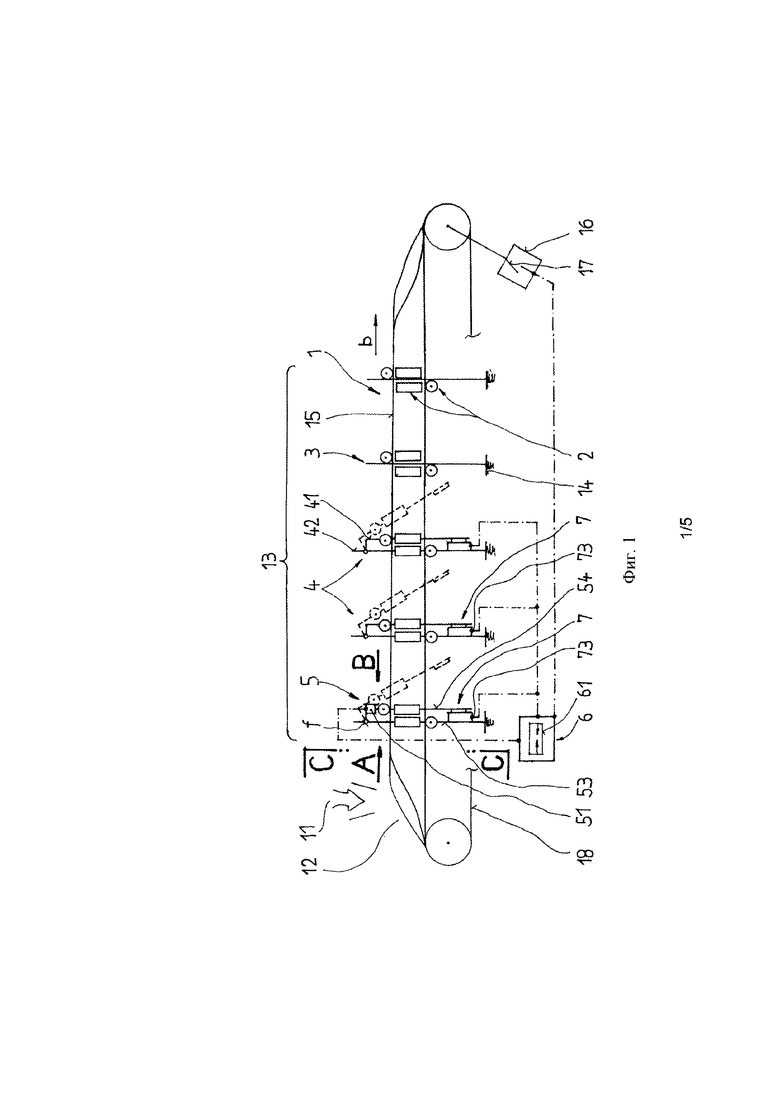
На фиг. 1 показан трубчатый конвейер с загрузочным участком и прилегающей к нему транспортирующей ветвью, вид сбоку;
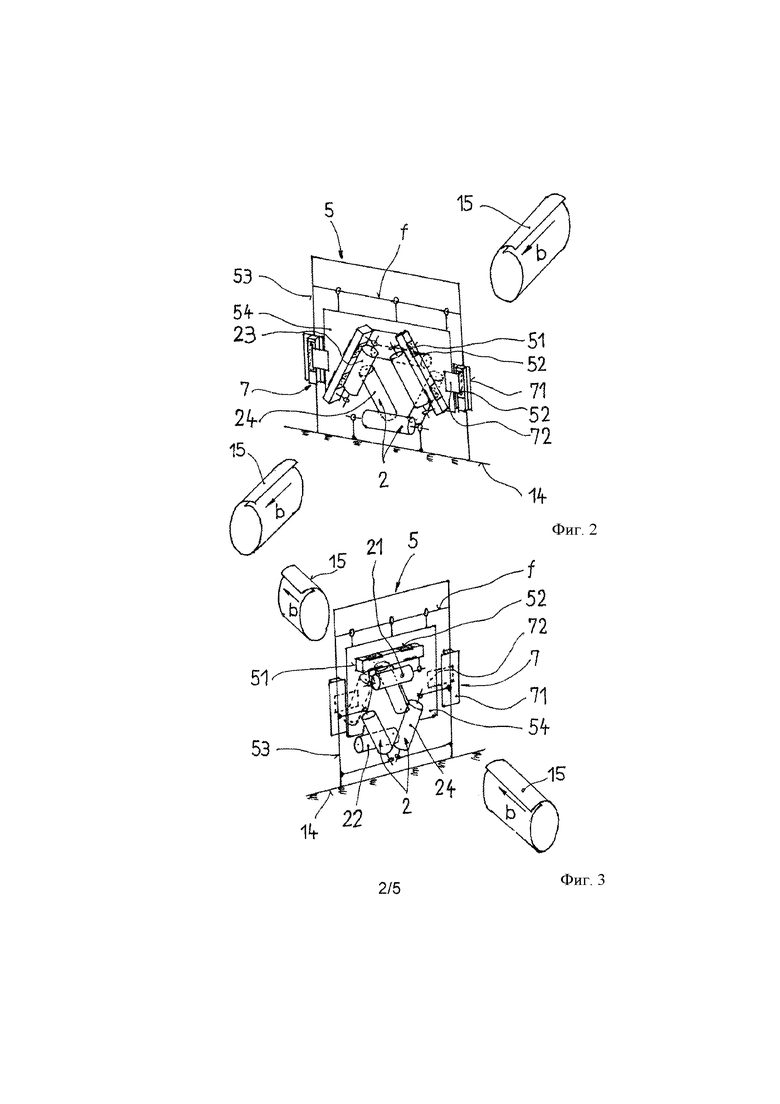
на фиг. 2 – измерительный опорный узел, вид в направлении B на фиг. 1;
на фиг. 3 – измерительный опорный узел, вид в направлении A на фиг. 1;
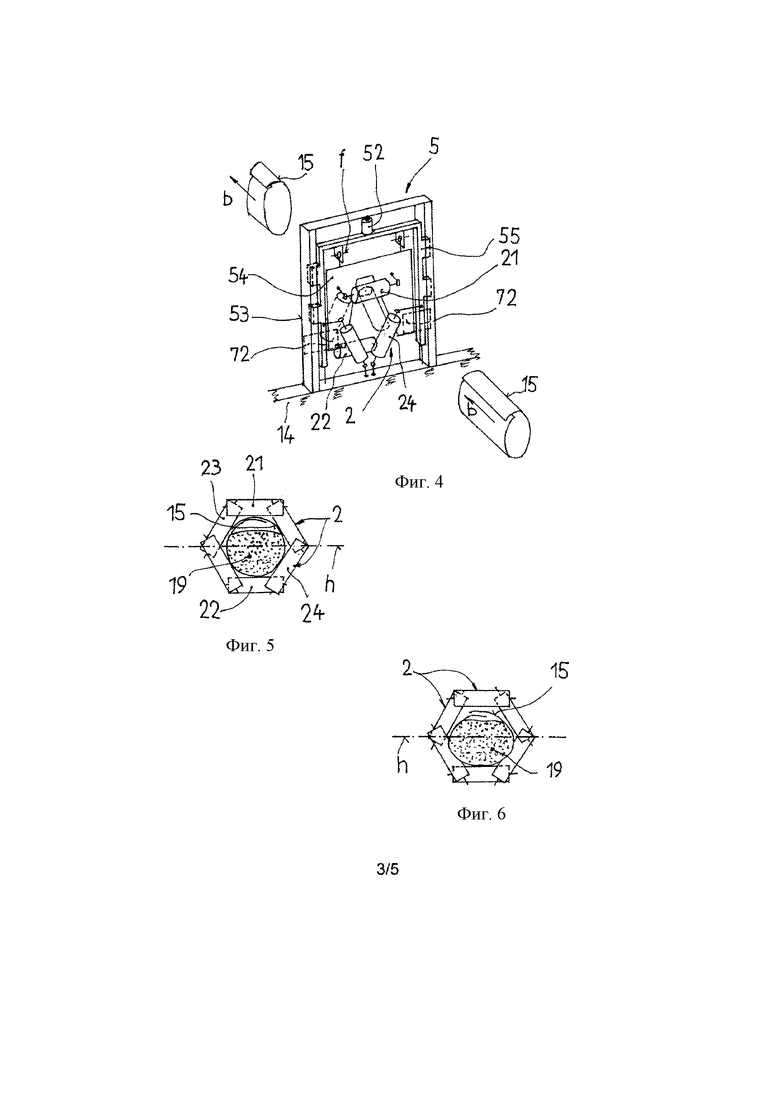
на фиг. 4 – измерительный опорный узел со скользящей рамой согласно другому варианту выполнения, вид в направлении A на фиг. 1;
на фиг. 5 – нормально нагруженная транспортерная лента, вид в разрезе по C-C на фиг. 1;
на фиг. 6 – объемно-перегруженная конвейерная лента, вид в разрезе по C-C на фиг. 1;
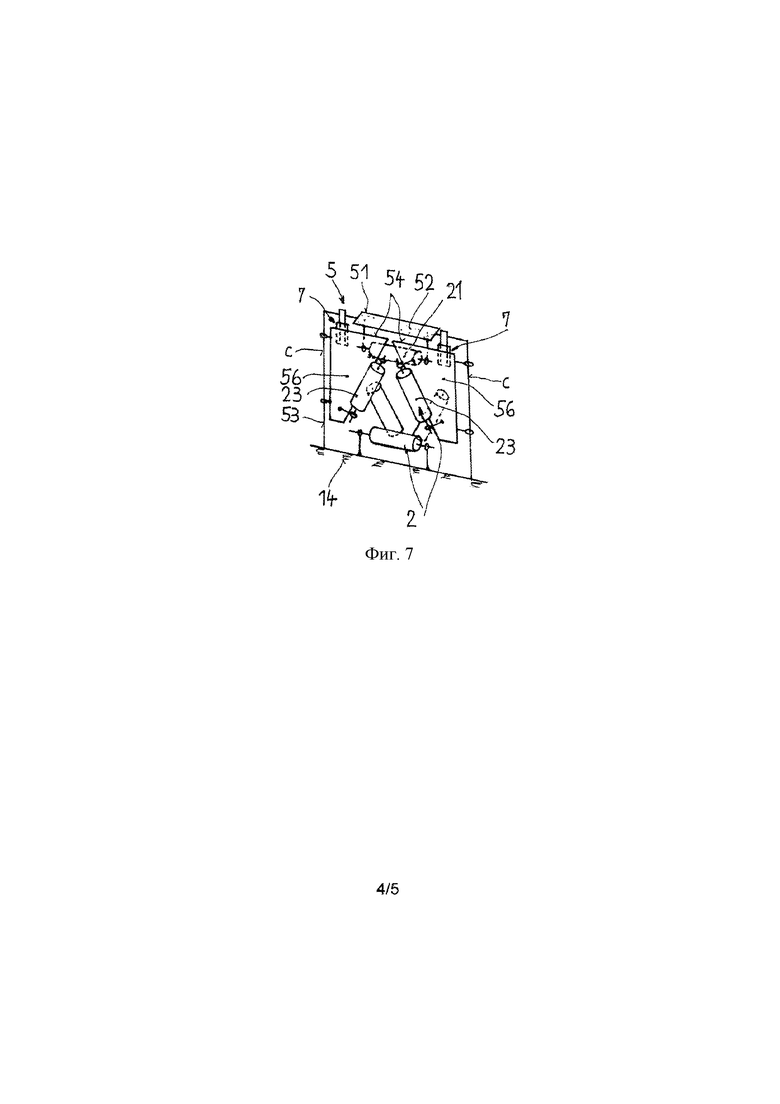
на фиг. 7 – другой вариант выполнения измерительного опорного узла;
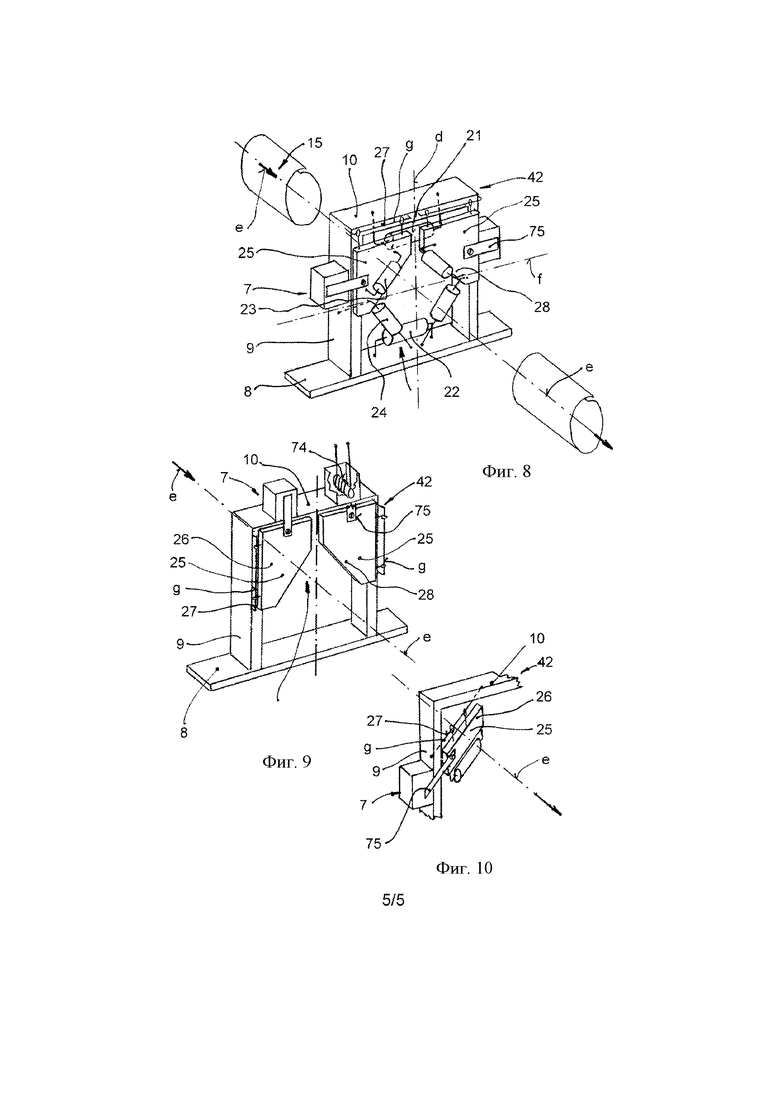
на фиг. 8 – вариант выполнения освобождающего опорного узла, вид в аксонометрии в направлении против направления движения конвейерной ленты;
на фиг. 9 – другой вариант выполнения освобождающего опорного узла без роликов, но с разрезом блокирующего устройства, вид в том же направлении, что и на фиг. 8;
на фиг. 10 – часть освобождающего опорного узла согласно другому варианту выполнения, вид в том же направлении, что и на предыдущих фигурах.
Основным компонентом трубчатого конвейера 1 является конвейерная лента 15, обернутая по меньшей мере вокруг ведущего и возвратного барабанов. Ведущий барабан соединен с электроприводом 16. Трубчатый конвейер 1 содержит средний участок 13, расположенный между загрузочным участком 11 (фиг. 1) и разгрузочным участком. На среднем участке 13 транспортирующей ветви 12 конвейерная лента 15 сворачивается в трубчатую форму под действием роликов 2. Обычно ролики 2 образуют многоугольник, предпочтительно, шестиугольник, и включают в себя верхний горизонтальный ролик 21, нижний горизонтальный ролик 22, два верхних наклонных ролика 23 и два нижних наклонных ролика 24. Ролики 2 шарнирно установлены на роликовых опорных узлах, которые прикреплены к основной раме 14. Большинство опорных узлов представляют собой обычные опорные узлы 3. К основной раме 14 также крепятся опорные узлы возвратной ветви 18 (не показаны).
За загрузочным участком 11 на основной раме 14 установлен измерительный опорный узел 5. Измерительный опорный узел 5 наиболее предпочтительно устанавливать первым за загрузочным участком 11 в направлении b движения конвейерной ленты 15. Измерительный опорный узел 5 содержит неподвижную раму 53 и шарнирно установленную на нем поворотную раму 54. В одном из возможных вариантов выполнения поворотная рама 54 выполнена с возможностью поворота вокруг горизонтальной оси f, расположенной над конвейерной лентой 15 в направлении, перпендикулярном её направлению b движения (фиг. 2, 3, 4). Перемещение поворотной рамы может составлять половину пространства, расположенного за поворотной рамой 54, в направлении b движения конвейерной ленты 15. Ограничение этого перемещения обеспечивается путем установки блокирующего устройства 7. Измерительный опорный узел 5, как и другие роликовые опорные узлы, содержит шесть роликов 2. Расположенные под свернутой конвейерной лентой 15 нижние ролики 22 и 24 установлены на неподвижной раме 53, а над горизонтальной поперечной осью h свернутой конвейерной ленты 15 на поворотной раме 54 установлены по меньшей мере верхние наклонные ролики 23.
Измерительный опорный узел 5 содержит динамометр 51, обеспечивающий непрерывное измерение сил нагрузки, передаваемых от конвейерной ленты 15 на измерительный опорный узел 5. Динамометр 51, содержащий весочувствительный элемент 52, может иметь различные конструкции.
Работа одного из типов динамометра 51 основана на измерении сил, действующих на ролики 2 измерительного опорного узла 5.
Как показано на фиг. 2, поворотная рама 54 может поворачиваться вокруг горизонтальной оси f, а динамометр 51 содержит весочувствительный элемент 52, прикрепленный по меньшей мере к одному верхнему ролику 21, 23 в пространстве над горизонтальной поперечной осью h свернутой конвейерной ленты 15.
В качестве альтернативы на фиг. 3 показан вариант, в котором все шесть роликов 2 установлены на измерительном опорном узле 5. Верхний горизонтальный ролик 21 установлен на поворотной раме 54 и имеет элемент связи с весочувствительным элементом 52. В непоказанном варианте выполнения, верхний горизонтальный ролик 21 может быть установлен на неподвижной раме 53.
В другом возможном варианте выполнения в комплекте из шести роликов 2 измерительного опорного узла 5 один верхний наклонный ролик 23 и верхний горизонтальный ролик 21, установленные на поворотной раме 54 над горизонтальной поперечной осью h свернутой конвейерной ленты 15, имеют элемент связи с весочувствительным элементом 52. В другом возможном варианте выполнения все три верхних ролика 21, 23, расположенные над горизонтальной поперечной осью h свернутой конвейерной ленты 15, снабжены элементом связи с весочувствительным элементом 52. В другом возможном варианте выполнения по меньшей мере один верхний наклонный ролик 23, установленный на поворотной раме 54, или, как показано на фиг. 2, оба наклонных ролика 23 снабжены элементом связи с весочувствительным элементом 52.
На фиг. 7 показан динамометр 51 такого же типа, какой используется в другом возможном варианте выполнения поворотной рамы 54. Эта поворотная рама 54 состоит из двух секций 56, каждая из которых шарнирно установлена на неподвижной раме 53 с возможностью независимого перемещения на расстояние, равное половине пространства, расположенного за поворотной рамой 54, если смотреть в направлении движения b конвейерной ленты 15. На каждой из секций 56 установлен верхний наклонный ролик 23, а на неподвижной раме 53 установлен верхний горизонтальный ролик 21. Динамометр 51 содержит весочувствительный элемент 52, прикрепленный к по меньшей мере одному верхнему ролику 21, 23 в пространстве над горизонтальной поперечной осью h свернутой конвейерной ленты 15. Это означает, что измерение сил, создаваемых конвейерной лентой 15, выполняется или одним верхним наклонным роликом 23, или обоими верхними наклонными роликами 23 одновременно, или верхним горизонтальным роликом 21, или верхним горизонтальным роликом 21 совместно с одним или двумя верхними наклонными роликами 23.
В варианте выполнения, показанном на фиг. 2, динамометр 51 измерительного опорного узла 5 содержит по меньшей мере один весочувствительный элемент 52, расположенный в месте соединения неподвижной и поворотной рам 53 и 54.
Весочувствительный элемент 52 способен измерять осевые силы от конвейерной ленты 15 посредством блокирующего устройства 7, включающего в себя первый элемент 71, 74 и второй элемент 72, 75. Первый элемент 71, 74 блокирующего устройства 7 установлен на неподвижной раме 53, а второй элемент 72, 75 установлен на поворотной раме 54. В этом варианте выполнения блокирующее устройство 7 является электромагнитным. Его первый элемент 71, 74 содержит электромагнитную катушку, а его второй элемент 72, 75 выполнен в виде полосы из магнитомягкого материала.
На фиг. 4 изображен динамометр 51 другого типа. Этот динамометр 51 содержит скользящую раму 55, расположенную между неподвижной рамой 53 и поворотной рамой 54. Скользящая рама 55 может скользить внутри неподвижной рамы 53 в вертикальном направлении. Поворотная рама 54 может перемещаться вокруг горизонтальной оси f, расположенной над конвейерной лентой 15 в направлении, перпендикулярном её направлению b движения. Между неподвижной рамой 53 и скользящей рамой 55 расположен весочувствительный элемент 52, который способен измерять силы, действующие в направлении вертикального перемещения скользящей рамы 55.
Независимо от типа, каждый из динамометров 51 приспособлен для выдачи сигнала, характеризующего силы нагрузки, на блок 6 управления (фиг. 1). Блок 6 управления содержит компаратор 61, обеспечивающий непрерывное сравнение текущей величины сил нагрузки с заданным значением. Это заданное значение представляет собой пороговую величину. Величина заданного значения равна максимально допустимой силе нагрузки. Заданное значение может устанавливаться в виде постоянной величины. По мере изменения физических характеристик конвейерной ленты 15 со временем, изменяется и её способность противостоять давлению вследствие изменения свойств транспортируемого материала 19, поэтому предпочтительно, чтобы блок 6 управления имел алгоритм, позволяющий определять заданное значение сил нагрузки как среднее арифметическое предыдущих значений сил нагрузки не перегруженной конвейерной ленты 15 по времени.
При превышении заданного значения блок 6 управления может генерировать сигнал отключения. Блок 6 управления также способен посылать сигнал отключения как на электропривод 16 конвейерной ленты 15, так и на блокирующее устройство 7, которым оснащен измерительный опорный узел 5. С помощью блокирующего устройства 7 выполняется фиксация в неподвижном положении поворотной рамы 54 измерительного опорного узла 5 относительно неподвижной рамы 53 во время движения конвейерной ленты 15. В блокирующем устройстве 7 электромагнитного типа в рассматриваемом варианте выполнения фиксация обеспечивается за счет электромагнитных сил. В этом случае сигнал отключения, генерируемый блоком 6 управления, характеризуется уменьшением или отключением напряжения питания.
Если трубчатый конвейер 1 имеет малую длину, то измерительного опорного узла 5 достаточно для удаления избыточного материала 19 с перегруженной конвейерной ленты 15. Однако если трубчатый конвейер 1 имеет большую длину, то его дальнейшее продвижение до отключения привода 16 слишком велико, и, следовательно, к основной опоре 14 перед обычными опорными узлами 3 необходимо прикрепить по меньшей мере один освобождающий опорный узел 4. В варианте выполнения, показанном на фиг. 1, изображены два освобождающих опорных узла 4, хотя их количество зависит, в частности, от инерционных характеристик двигающейся конвейерной ленты 15. Освобождающий опорный узел 4 содержит неподвижную раму, также называемую фиксированной рамой 42, и отклоняемую раму 41. Отклоняемая рама 41 может быть заблокирована в исходном положении относительно фиксированной рамы 42, и может освобождаться для поворота на расстояние, равное половине пространства, расположенного за отклоняемой рамой 41 в направлении b движения конвейерной ленты 15. Для блокировки отклоняемой рамы 41 освобождающий опорный узел 4 оснащен блокирующим устройством, аналогичным блокирующему устройству 7 измерительного опорного узла 5.
Устройство защиты конвейерной ленты 15 от объемной перегрузки при движении трубчатого конвейера 1 способно контролировать состояние конвейерной ленты 15 и обнаруживать её выпучивание после заполнения транспортируемым материалом 19. Материал 19 загружается на открытую конвейерную ленту 15 на загрузочном участке 11, за которым она сворачивается в форме трубы под действием первого роликового опорного узла. Как показано на фиг. 1, первым за загрузочным участком роликовым опорным узлом 11 является измерительный опорный узел 5. Силы нагрузки, действующие от конвейерной ленты 15 на измерительный опорный узел 5, замеряются динамометром 51 и оцениваются в блоке управления 6. Силы нагрузки могут различаться в зависимости от расположения динамометра 51. Динамометры 51 имеют первый характеристический параметр, когда измеряются силы нагрузки, действующие на ролики 2 (фиг. 2, 3, 7), второй характеристический параметр, если измеряются силы нагрузки в области блокирующего устройства 7 (фиг. 2, 3), и третий характеризующий показатель при измерении силового взаимодействия между скользящей рамой 55 и неподвижной рамой 53 (фиг. 4).
Если конвейерная лента 15 загружена соответствующим количеством материала 19, получающаяся труба имеет круглую форму (фиг. 5), и динамометр 51 регистрирует силы нагрузки, которые оцениваются компаратором 61 блока 6 управления как допустимые. Блок 6 управления не создает сигнал отключения, так что привод 16 активно работает в блокирующем устройстве 7, измерительный опорный узел 5 и освобождающий опорный узел 4 находятся в активном состоянии. В результате поворотная рама 54 измерительного опорного узла 5 зафиксирована в неподвижном положении относительно неподвижной рамы 53, и отклоняемая рама 41 освобождающего опорного узла 4 заблокирована относительно фиксированной рамы 42. В блокирующем устройстве 7 электромагнитного типа фиксация достигается за счет притягивания ферромагнитной полосы к электромагнитной катушке.
При возникновении объемной перегрузки конвейерной ленты 15 (фиг. 6), реактивные силы нагрузки, действующие на динамометр 51, возрастают выше заданного значения, и блок 6 управления выдает сигнал на отключение привода 16 и блокирующего устройства 7. Самым простым способом подачи сигнала отключения может быть отключение подачи тока питания на привод 16 и блокирующее устройство 7. В более сложной системе управления активный сигнал отключения подается на устройство 17 отключения привода 16, а также на освобождающее устройство 73 электромагнитного замка. Устройство 17 отключения и освобождающее устройство 73 представляют собой полупроводниковый и релейный преобразователи, работающие по принципу контактора, который, например, отключает подачу электричества на привод 16 и на электромагнитный замок.
После разблокирования блокирующего устройства 7 происходит расфиксация поворотной рамы 54 измерительного опорного узла 5 и отклоняемой рамы 41 освобождающего опорного узла 4, и если их ролики 2 контактируют с выпученной конвейерной лентой 15, соответствующие рамы (54, 41) наклоняются в направлении движения b конвейерной ленты 15, как показано пунктиром на фиг. 1. Когда поворотная и отклоняемая рамы 54 и 41 наклонены, зазор между роликами 2 становится им по сравнению с исходным блокированным положением. Конвейерная лента 15 раскрывается. Оператор регулирует раскрытие ленты таким образом, чтобы можно было вручную удалить материал 19 с конвейерной ленты 15. После выполнения этой операции оператор возвращает поворотную 54 и отклоняемую 41 рамы в исходное вертикальное положение и блокирует их в этом положении посредством устройства 7. После этого трубчатый конвейер 1 готов к дальнейшей работе.
Устройство защиты конвейерной ленты 15 от объемной перегрузки может оказаться особенно полезным для длинных трубчатых конвейеров 1 большой емкости, обладающих большой инерцией движения, вследствие чего существует опасность повреждения большого числа обычных опорных узлов 3. Благодаря быстрой реакции на перегрузку непосредственно за загрузочным участком 11, конвейерная лента 15 может быть остановлена уже на участке, оснащенном измерительным опорным узлом и освобождающими опорными узлами 4, так что деформирование ленты не распространяется дальше, и конструкция трубчатого конвейера 1 защищена от повреждения. Устройство согласно изобретению может быть использовано также и для коротких трубчатых транспортеров 1, на которых можно устанавливать один только измерительный опорный узел 5 без необходимости установки освобождающих опорных узлов 4.
На фиг. 8 – 10 показаны различные варианты выполнения освобождающего опорного узла 4.
Основными компонентами освобождающего опорного узла 4 трубчатого конвейера являются фиксированная рама 42, отклоняемая рама 41 и ролики 2, окружающие конвейерную ленту 15, свернутую на транспортирующем участке (фиг. 8).
Фиксированная рама 42 содержит поперечную балку 8, которая является частью опорной конструкции трубчатого конвейера. К поперечной балке 8 прикреплены две стойки 9, установленные на расстоянии друг от друга, так, что между ними может проходить свернутая конвейерная лента 15. Стойки 9 соединены между собой жесткой перемычкой 10.
Отклоняемая рама 41 установлена на фиксированной раме 42 и содержит две зеркально симметричных секции 25. Секции 25 симметричны относительно оси d, перпендикулярной продольной оси e свернутой конвейерной ленты 15. Каждая секция 25 может независимо поворачиваться по своей внешней кромке 26 посредством шарнира 27, выполненного на фиксированной раме 42, таким образом, чтобы ось g его вращения располагалась между вертикальным и горизонтальным положениями. Ось g вращения шарнира 27 может быть расположена горизонтально, как показано на фиг. 8, вертикально, как показано на фиг. 9, и наклонно, как показано на фиг. 10. Шарниры 27 выполнены так, чтобы отклоняемая рама 41 или её секции 25 могли отклоняться от исходного положения, в котором они прижаты к фиксированной раме 42, на расстояние, равное половине пространства, расположенного за освобождающим опорным узлом, в направлении движения конвейерной ленты 15. В исходном положении отклоняемая рама 41 перпендикулярна продольной оси e свернутой конвейерной ленты 15. Это означает, что обе секции 25 занимают это положение.
Освобождающий опорный узел 4 содержит шесть роликов 2: установленные над поперечной осью f свернутой конвейерной ленты 15 верхние наклонные ролики 23 и верхний горизонтальный ролик 21, а также установленные под поперечной осью f свернутой конвейерной ленты 15 нижние наклонные ролики 24 и нижний горизонтальный ролик 22. Ролики 2 установлены так, что верхний наклонный ролик 23 расположен на внутренней кромке 28 каждой секции 25, а верхний горизонтальный ролик 21 и все нижние ролики (т.е., нижние наклонные ролики 24 и нижний горизонтальный ролик 22) установлены на фиксированной раме 42.
Каждая из секций 25 снабжена блокирующим устройством 7. Блокирующее устройство 7 способно в исходном положении удерживать секцию 25 прижатой к фиксированной раме 42, и освобождать секцию 25 перед ее перемещением в наклонное положение. В варианте выполнения, показанном на фиг. 9, используется блокирующее устройство 7 электромагнитного типа. Оно содержит электромагнитную катушку 74, прикрепленную к фиксированной раме 42, и полосу 75 из ферромагнитного материала, прикрепленную к секции 25. В качестве альтернативы можно использовать блокирующее устройство 7 с подпружиненной задвижкой или, в самом простом случае, с упругим рычагом, размеры которого выбраны так, чтобы он изгибался под действием сил, возникающих в результате деформации конвейерной ленты 15.
При нормальном движении конвейерной ленты 15 каждая секция 25 освобождающего опорного узла 4 занимает исходное положение, т.е. прижата к фиксированной раме 42, в котором она удерживается блокирующим устройством 7. При использовании блокирующего устройства 7 электромагнитного типа согласно вышеописанному варианту выполнения на электромагнитную катушку 74 подается электрический ток, и генерируемые электромагнитные силы действуют полосу 75, удерживающую каждую из секций. Ролики 2 окружают конвейерную ленту 15 и удерживают её в свернутом состоянии. При возникновении объемной перегрузки и деформации конвейерной ленты 15 её привод и питание электромагнитного замка отключаются. Это приводит к освобождению секций 25, которые под действием деформированной и замедляющейся конвейерной ленты 15 отклоняются от своего исходного положения на расстояние, равное половине пространства за освобождающим опорным узлом в направлении движения d свернутой конвейерной ленты 15. Аналогичную функцию, т.е. освобождение секций 25, выполняет также блокирующее устройство 7 с механическими замками, содержащими подпружиненную задвижку, или блокирующее устройство 7 с упругими рычагами. Когда секции 25 находятся в наклонном положении, зазор между роликами 2 больше, чем в исходном положении. Освобожденные секции 25, отклонившиеся от своего исходного положения, могут продолжать поворачиваться, еще больше увеличивая зазор между роликами 2. Конвейерную ленту 15 можно легко раскрыть и удалить из неё избыточный материал. После удаления избыточного материала секции 25 снова возвращают в исходное положение, в котором они фиксируются. После этого трубчатый конвейер снова готов к дальнейшей работе.
Список ссылочных обозначений
1 трубчатый конвейер;
11 загрузочный участок;
12 транспортирующий участок;
13 средний участок трубчатого конвейера;
14 основная рама трубчатого конвейера;
15 конвейерная лента;
16 привод;
17 устройства отключения;
18 возвратный участок;
19 материал;
2 ролик;
21 верхний горизонтальный ролик;
22 нижний горизонтальный ролик;
23 верхний наклонный ролик;
24 нижний наклонный ролик;
25 две зеркально симметричных секции;
26 внешняя кромка секции;
27 шарнир;
28 внутренняя кромка секции;
3 обычный опорный узел;
4 освобождающий опорный узел;
41 отклоняемая рама;
42 фиксированная рама;
5 измерительный опорный узел;
51 динамометры;
52 весочувствительный элемент;
53 неподвижная рама;
54 поворотная рама;
55 скользящая рама;
56 секция;
6 блоки управления;
61 компаратор;
7 блокирующие устройства;
71 первый элемент;
72 второй элемент;
73 освобождающие устройства;
74 электромагнитная катушка;
75 полоса;
8 поперечная балка;
9 стойка;
10 жесткая перемычка;
b направление движения;
c вертикальная ось;
f горизонтальная ось;
h горизонтальная поперечная ось свернутой конвейерной ленты 15;
d ось симметрии;
e продольная ось свернутой конвейерной ленты;
g ось вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРУБЧАТЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2007 |
|
RU2332344C1 |
| ЛЕНТОЧНЫЙ ТРУБЧАТЫЙ КОНВЕЙЕР | 2012 |
|
RU2494028C1 |
| ТРУБЧАТЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 1999 |
|
RU2170202C2 |
| Способ автоматического постоянного центрирования ленты роликами на желобчатых и трубчатых конвейерах | 2017 |
|
RU2679276C1 |
| ТРАНСПОРТЕР С ТРУБЧАТОЙ ЛЕНТОЙ | 1991 |
|
RU2023641C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2004 |
|
RU2264966C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ КОНВЕЙЕРА | 2008 |
|
RU2477250C2 |
| НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО КОНВЕЙЕРНОЙ ЛЕНТЫ ДЛЯ ТРУБЧАТОГО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2009 |
|
RU2412886C2 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1999 |
|
RU2220088C2 |
| ЛЕНТОЧНЫЙ ТРУБЧАТЫЙ КОНВЕЙЕР | 2008 |
|
RU2363645C1 |
Конвейер содержит расположенный между загрузочным (11) и разгрузочным участками средний участок (13), конвейерная лента (15) на котором свернута в трубчатую форму под действием роликов (2), установленных на роликовых опорных узлах. За загрузочным участком (11) расположен измерительный опорный узел (5), включающий в себя неподвижную раму (53) и способную поворачиваться относительно нее поворотную раму (54). Неподвижная рама (53) включает в себя нижние ролики (22, 24), установленные под горизонтальной поперечной осью (h) свернутой конвейерной ленты (15), а поворотная рама (54) включает в себя верхние наклонные ролики (23), установленные над горизонтальной поперечной осью (h) свернутой конвейерной ленты (15). Конвейер содержит также измерительный опорный узел (5), который включает в себя динамометр (51), обеспечивающий непрерывное измерение сил нагрузки, передаваемых от конвейерной ленты (15), и подачу на блок (6) управления сигналов, характеризующих указанные силы нагрузки. Динамометр (51) содержит весочувствительный элемент (52), установленный на верхнем ролике (21, 23). Обеспечивается измерении сил реакции от нагрузки в течение всего периода перемещения конвейерной ленты, при этом информация относительно величины сил нагрузки доступна постоянно. 2 н. и 10 з.п. ф-лы, 10 ил.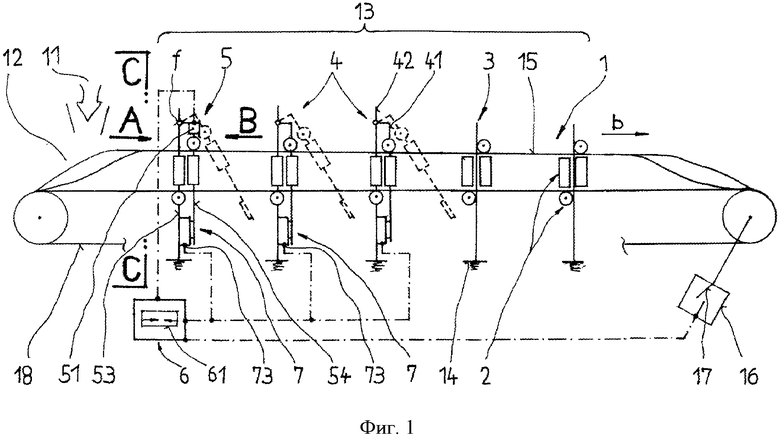
1. Трубчатый конвейер с устройством защиты конвейерной ленты от объемной перегрузки, содержащий расположенный между загрузочным (11) и разгрузочным участками средний участок (13), на котором конвейерная лента (15) свернута в по существу трубчатую форму посредством роликов (2), установленных на роликовых опорных узлах, при этом за загрузочным участком (11) расположен измерительный опорный узел (5), включающий в себя неподвижную раму (53) и поворотную раму (54), способную поворачиваться относительно неподвижной рамы (53), причем неподвижная рама (53) включает в себя нижние ролики (22, 24), установленные под горизонтальной поперечной осью (h) свернутой конвейерной ленты (15); поворотная рама (54) включает в себя верхние наклонные ролики (23), установленные над горизонтальной поперечной осью (h) свернутой конвейерной ленты (15); а измерительный опорный узел (5) включает в себя динамометр (51), обеспечивающий непрерывное измерение сил нагрузки, передаваемых от конвейерной ленты (15), и подачу на блок управления (6) сигналов, характеризующих указанные силы нагрузки, отличающийся тем, что поворотная рама (54) установлена с возможностью перемещения вокруг горизонтальной оси (f) неподвижной рамы (53), причем горизонтальная ось (f) расположена над конвейерной лентой (15) перпендикулярно её направлению (b) движения, а динамометр (51) содержит весочувствительный элемент (52), установленный на по меньшей мере одном верхнем ролике (21, 23).
2. Трубчатый конвейер по п. 1, отличающийся тем, что блок (6) управления содержит компаратор (61), способный в реальном времени выполнять непрерывное сравнение значений сил нагрузки с заданным значением и генерировать сигнал отключения при превышении указанного заданного значения.
3. Трубчатый конвейер по любому из пп. 1 или 2, отличающийся тем, что блок (6) управления выполнен с возможностью отправки сигнала отключения на привод (16) конвейерной ленты (15) и/или на блокирующее устройство (7).
4. Трубчатый конвейер по п. 2, отличающийся тем, что блокирующее устройство (7) выполнено с возможностью блокировки поворотной рамы (54) относительно неподвижной рамы (53) при движении конвейерной ленты (15) и освобождения этой поворотной рамы (54) при получении сигнала отключения.
5. Трубчатый конвейер по любому из пп. 1 – 4, отличающийся тем, что поворотная рама (54) установлена с возможностью перемещения, ограниченного половиной пространства, расположенного за поворотной рамой (54) в направлении (b) движения конвейерной ленты (15).
6. Трубчатый конвейер по любому из пп. 1 – 5, отличающийся тем, что измерительный опорный узел (5) расположен первым в последовательности опорных узлов за загрузочным участком (11) в направлении (b) движения конвейерной ленты (15).
7. Трубчатый конвейер по любому из пп. 1 – 6, отличающийся тем, что заданное значение сил нагрузки представляет собой среднее арифметическое предшествующих значений сил нагрузки от не перегруженной конвейерной ленты (15).
8. Трубчатый конвейер по любому из пп. 1 – 7, отличающийся тем, что динамометр (51) содержит по меньшей мере один весочувствительный элемент (52), установленный на неподвижной раме (53) в месте её соединения с поворотной рамой (54) и способный измерять осевые силы от конвейерной ленты (15).
9. Трубчатый конвейер по любому из пп. 1 – 8, отличающийся тем, что между неподвижной (53) и поворотной (54) рамами установлена скользящая рама (55), способная скользить в неподвижной раме (53) в вертикальном направлении, при этом поворотная рама (54) установлена на скользящей раме (55) с возможностью поворота вокруг горизонтальной оси (f), расположенной над конвейерной лентой (15) перпендикулярно направлению (b) её движения, причем между неподвижной (53) и скользящей (55) рамами установлен весочувствительный элемент (52) для измерения сил, действующих в направлении вертикального перемещения скользящей рамы (55).
10. Трубчатый конвейер по любому из пп. 1 – 9, отличающийся тем, что поворотная рама (54) состоит из двух секций (56), каждая из которых шарнирно установлена на неподвижной раме (53) с возможностью независимого отклонения на расстояние, равное половине пространства, расположенного за поворотной рамой (54) в направлении (b) движения конвейерной ленты (15), при этом на каждой секции (56) установлен верхний наклонный ролик (23), на неподвижной раме (53) установлен верхний горизонтальный ролик (21), а динамометр (51) содержит весочувствительный элемент (52), прикрепленный к по меньшей мере одному верхнему ролику (21, 23).
11. Трубчатый конвейер по любому из пп. 1 – 10, отличающийся тем, что в направлении (b) движения конвейерной ленты (15) за измерительным опорным узлом (5) и перед обычными опорными узлами (3) расположен по меньшей мере один освобождающий опорный узел (4), содержащий фиксированную раму (42), отклоняемую раму (41) и блокирующие устройства (7), способные блокировать отклоняемую раму (41) в исходном положении относительно фиксированной рамы (42) при движении конвейерной ленты (15) и освобождать отклоняемую раму (41) при получении сигнала отключения от блока (6) управления, при этом в освобожденном состоянии отклоняемая рама (41) способна поворачиваться на расстояние, равное половине пространства, расположенного за отклоняемой рамой (41) в направлении движения (b) конвейерной ленты (15), причем в наклонном положении отклоняемой рамы (41) зазор между роликами (2) больше, чем в исходном блокированном положении.
12. Трубчатый конвейер с освобождающим опорным узлом (4), содержащим ролики (2), окружающие свернутую в трубчатую форму конвейерную ленту (15), фиксированную раму (42) и удерживаемую ей отклоняемую раму (41), при этом над поперечной осью свернутой конвейерной ленты (15) установлены верхние наклонные ролики (23) и верхний горизонтальный ролик (21), а под поперечной осью свернутой конвейерной ленты (15) установлены нижние наклонные ролики (24) и нижний горизонтальный ролик (22), причем во время движения свернутой конвейерной ленты (15) отклоняемая рама (41) способна отклоняться от своего исходного положения на расстояние, равное половине пространства, расположенного за освобождающим опорным узлом (4), так что отклоняемая рама (41) в исходном положении перпендикулярна продольной оси свернутой конвейерной ленты (15), а в наклонном положении зазор между роликами (2) больше, чем в исходном положении, отличающийся тем, что отклоняемая рама (41) состоит из двух секций (25), зеркально симметричных относительно оси симметрии (b), перпендикулярной продольной оси свернутой конвейерной ленты (15), при этом каждая секция (25) способна поворачиваться у своей внешней кромки (26) посредством шарнира (27) на фиксированной раме (42), так что ось вращения (c) шарнира (27) ориентирована в диапазоне от вертикального до горизонтального направлений, при этом на внутренней кромке (28) каждой секции (25) установлен верхний наклонный ролик (23), а на фиксированной раме (42) установлены верхний горизонтальный ролик (21), нижние наклонные ролики (24) и нижний горизонтальный ролик (22), причем каждая из секций (25) содержит блокирующее устройство (7), способное удерживать ее в исходном положении прижатой к фиксированной раме (42) и освобождать ее при повороте этой секции (25) в наклонное положение.
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| DE 4018575 A1, 12.12.1991 | |||
| CN 201485012 U, 26.05.2010. | |||

