Область техники, к которой относится изобретение
Изобретение относится к индукционной передаче электроэнергии, а в частности - но не исключительно - к передатчику электроэнергии, обеспечивающему систему индукционной передачи электроэнергии, в которой используются элементы, совместимые со спецификацией стандарта Qi.
УРОВЕНЬ ТЕХНИКИ
За последнее десятилетие расширились количество и многообразие портативных и мобильных устройств, находящихся в эксплуатации. Например, использование мобильных телефонов, планшетов, медиа-плейеров, и т.д., стало повсеместным. Такие устройства обычно питаются от внутренних батареек, а типичный сценарий использования зачастую требует подзарядки батареек или непосредственного проводного питания устройства от внешнего источника питания.
Большинству современных систем требуется проводка и/или электрические контакты в явном виде, запитываемые от внешнего источника питания. Однако это, как правило, непрактично и требует, чтобы пользователь физически вставлял соединители или устанавливал физический электрический контакт иным образом. Как правило, пользователь также испытывает неудобства из-за введения отрезков провода. В типичном случае, расход электроэнергии тоже значительно отличается, и в настоящее время большинство устройств снабжены своим собственным специализированным источником питания, а это приводит к тому, что типичный пользователь имеет большое количество разных источников питания, каждый из которых предназначен специально для некоторого конкретного устройства. Хотя использование внутренних батареек может снять потребность в проводном соединении во время использования, это обеспечивает лишь частичное решение, поскольку батарейкам потребуется подзарядка (или замена, что дорого). Использование батареек также может существенно увеличивать вес и - возможно - стоимость и размеры устройств.
Чтобы значительно облегчить пользователю эксплуатацию, предложено использовать беспроводной источник питания, при наличии которого передача электроэнергии от катушки передатчика в устройстве передачи электроэнергии к катушке приемника в отдельных устройствах происходит индукционно.
Передача электроэнергии посредством магнитной индукции является общеизвестной концепцией, применяемой главным образом в трансформаторах, обладающих тесным взаимодействием между первичной катушкой передатчика и вторичной катушкой приемника. За счет разделения первичной катушки передатчика и вторичной катушки приемника между двумя устройствами, беспроводная передача электроэнергии между ними становится возможной на основе трансформатора со слабой связью.
Такая компоновка обеспечивает беспроводную передачу электроэнергии в устройство, не требующую никаких проводов или установления физических электрических соединений. В самом деле, можно просто обеспечить подзарядку или внутреннее питание устройства, располагаемого рядом с катушкой передатчика или поверх нее. Например, устройства передачи электроэнергии могут быть выполнены с горизонтальной поверхностью, на которую его можно легко поставить, чтобы запитать.
Помимо этого, такие компоновки, обеспечивающие беспроводную передачу электроэнергии, можно с выгодой проектировать таким образом, что можно будет использовать устройство передачи электроэнергии с рядом устройств приема электроэнергии. В частности, определен стандарт беспроводной передачи электроэнергии, известный как стандарт Qi, который в настоящее время дорабатывается. Этот стандарт обеспечивает использование устройств приема электроэнергии, которые соответствует стандарту Qi, с устройствами приема электроэнергии, которые тоже соответствует стандарту Qi, не требующее, чтобы они были от одной и той же фирмы-изготовителя или специально предназначены друг для друга. Стандарт Qi дополнительно предусматривает некоторые функциональные возможности обеспечения эксплуатации, адаптируемой к конкретному устройству приема электроэнергии (например, в зависимости от удельного расхода электроэнергии).
Стандарт Qi разработан Консорциумом беспроводной электромагнитной энергии (Wireless Power Consortium), а больше информации о нем можно найти, например, на веб-сайте этого консорциума:
http://www.wirelesspowerconsortium.com/index.html, где можно найти, в частности, определенные документы этого стандарта.
В стандарте Qi на беспроводную передачу электроэнергии указано, что передатчик электроэнергии должен быть способным обеспечить гарантированную электроэнергию приемнику электроэнергии. Необходимый уровень удельной отдачи электроэнергии зависит от конструкции приемника электроэнергии. Чтобы задать гарантируемую электроэнергию, определяют набор испытуемых приемников электроэнергии и условия нагрузки, которые описывают уровень гарантируемой электроэнергии для каждого из условий.
Стандарт Qi характеризует совокупность технических требований, параметров и рабочих процедур, которым должно соответствовать совместимое с ним устройство.
Связь
Стандарт Qi поддерживает связь от приемника электроэнергии к передатчику электроэнергии, вследствие чего приемник электроэнергии может выдавать информацию, которая может обеспечить адаптацию передатчика электроэнергии к конкретному приемнику электроэнергии. В стандарте, действующем в настоящее время, охарактеризована линия однонаправленной связи от приемника электроэнергии к передатчику электроэнергии, а соответствующий подход основан на философии приемника электроэнергии, являющегося управляющим элементом. Чтобы подготовить передачу электроэнергии между передатчиком электроэнергии и приемником электроэнергии и управлять этой передачей, приемник электроэнергии, в частности, сообщает информацию передатчику электроэнергии.
Однонаправленная связь достигается с помощью приемника электроэнергии, осуществляющего модуляцию нагрузки, при этом нагрузка, прикладываемая приемником электроэнергии ко вторичной катушке приемника, изменяется, обеспечивая модуляцию сигнала питания. Передатчик электроэнергии сможет обнаруживать результирующие изменения в электрических характеристиках (например, изменения в потреблении тока) и декодировать (демодулировать) их.
Таким образом, на физическом уровне, канал связи от приемника электроэнергии к передатчику электроэнергии использует сигнал питания в качестве носителя данных. Приемник электроэнергии модулирует нагрузку, которая обнаруживается по изменению амплитуды и/или фазы тока или напряжения катушки передатчика. Данные форматируются в байтах и пакетах.
Больше информации можно найти в части 1 главы 6 спецификации стандарта Qi (версия 1.0) на беспроводную передачу электроэнергии.
Хотя стандарт Qi предусматривает использование линии однонаправленной связи, предложено ввести и связь от передатчика электроэнергии к приемнику электроэнергии.
Управление системой
Для управления системой беспроводной передачи электроэнергии, стандарт Qi предписывает некоторое количество фаз или режимов, в которых система может находиться в разные моменты эксплуатации. Больше подробностей можно найти в части 1 главы 5 спецификации стандарта Qi (версия 1.0) на беспроводную передачу электроэнергии.
Система может находиться в следующих фазах.
Фаза выбора
Эта фаза является типичной фазой, когда система не используется, т.е., когда нет взаимодействия между передатчиком электроэнергии и приемником электроэнергии (т.е., нет приемника электроэнергии, расположенного близко к передатчику электроэнергии).
В фазе выбора, передатчик электроэнергии может находиться в режиме пониженного энергопотребления, но будет способен обнаружить возможное присутствие объекта. Аналогичным образом, приемник будет ждать появления сигнала питания.
Пинг-фаза
Если передатчик обнаруживает возможное присутствие объекта, например, благодаря изменению емкости, система переходит в пинг-фазу, в которой передатчик электроэнергии (по меньшей мере, с перерывами) выдает сигнал питания. Этот сигнал питания обнаруживается приемником электроэнергии, которые переходит к посылке начального пакета в передатчик электроэнергии. Конкретно, если приемник электроэнергии присутствует на интерфейсе передатчика электроэнергии, приемник электроэнергии передает начальный пакет информации об уровне сигнала передатчику электроэнергии. Пакет информации об уровне сигнала обеспечивает указание степени взаимодействия между катушкой передатчика электроэнергии и катушкой приемника электроэнергии. Пакет информации об уровне сигнала обнаруживается передатчиком электроэнергии.
Фаза идентификации и конфигурации
Затем передатчик электроэнергии и приемник электроэнергии переходят в фазу идентификации и конфигурации, в которой приемник электроэнергии сообщает, по меньшей мере, идентификатор и требуемую электроэнергию. Эта информация сообщается в нескольких пакетах данных путем модуляции нагрузки. Передатчик электроэнергии поддерживает постоянный сигнал питания во время фазы идентификации и конфигурации, чтобы обеспечить модуляцию нагрузки, подлежащую обнаружению. Конкретно, с этой целью, передатчик электроэнергии выдает сигнал питания с постоянной амплитудой, частотой и фазой (за исключением изменения, обуславливаемого модуляцией нагрузки).
При подготовке реальной передачи электроэнергии, приемник электроэнергии может подавать принимаемый сигнал для подключения питания к своей электронике, но он поддерживает свою выходную нагрузку отсоединенной. Приемник электроэнергии передает пакеты передатчику электроэнергии. Эти пакеты включают в себя обязательные сообщения, такие, как пакет идентификации и конфигурации, или могут включать в себя несколько определенных необязательных сообщений, таких, как расширенный пакет идентификации или пакет задержки электроэнергии.
Передатчик электроэнергии переходит к конфигурированию сигнала питания в соответствии с информацией, принимаемой от приемника электроэнергии.
Фаза передачи электроэнергии:
Затем система переходит в фазу передачи электроэнергии, в которой передатчик электроэнергии выдает требуемый сигнал питания, а приемник электроэнергии соединяется с выходной нагрузкой, чтобы запитать ее получаемой электроэнергией.
Во время этой фазы, приемник электроэнергии оперативно контролирует условия выходной нагрузки, а конкретно - он измеряет ошибку управления между фактическим значением и желаемым значением для некоторой определенной рабочей точки. Он передает эти ошибки управления в сообщениях об ошибках управления передатчику электроэнергии с минимальной скоростью передачи, например, каждые 250 мсек. Это обеспечивает указание продолжающегося присутствия приемника электроэнергии передатчику электроэнергии. Кроме того, сообщения об ошибках управления используются для реализации управления электроэнергией по замкнутому циклу в ситуациях, где передатчик электроэнергии адаптирует сигнал питания с целью минимизации ошибки, о которой сообщалось. Конкретно, если фактическое значение для рабочей точки равно желаемому значению, приемник электроэнергии передает ошибку управления со значением «нуль», что не приводит к изменению сигнала питания. В случае, если приемник электроэнергии передает ошибку управления, отличающуюся от нуля, передатчик электроэнергии соответственно скорректирует сигнал питания.
Стандарт Qi изначально характеризовал беспроводную передачу электроэнергии для маломощного устройства, считающегося устройством, имеющим потребление электроэнергии менее 5 Вт. В системах, которые окажутся попадающими в диапазон, оговариваемый этим стандартом, используется индуктивная связь между двумя планарными катушками для передачи электроэнергии от передатчика электроэнергии к приемнику электроэнергии. Расстояние между этими двумя катушками в типичном случае составляет 5 мм.
Вместе с тем, ведется работа по увеличению располагаемой электроэнергии и, в частности, вышеупомянутый стандарт распространен на среднемощные устройства, являющиеся устройствами, имеющими потребление электроэнергии более 5 Вт. Ведется и другая работа - по удлинению расстояния между катушками, например, до 40 мм.
Как упоминалось, стандарт Qi поддерживает связь от приемника электроэнергии к передатчику электроэнергии, и это используется для того, чтобы приемник электроэнергии получил возможность сообщать о расходе электроэнергии передатчику электроэнергии, чем передатчик электроэнергии впоследствии сможет воспользоваться для задания характеристик генерируемого сигнала питания. Конкретно, приемник электроэнергии может передавать сообщения об ошибках управления электроэнергией передатчику электроэнергии, а передатчик электроэнергии сможет соответственно управлять передаваемой электроэнергией. Таким образом и реализуется управление электроэнергией. Передатчик электроэнергии в типичном случае выполнен с возможностью коррекции передаваемой электроэнергии путем изменения рабочего цикла или напряжения питания, подаваемого на схему возбуждения для индуктора передатчика, или путем изменения частоты генерируемого сигнала питания. Поскольку индуктор передатчика и индуктор приемника в типичном случае являются частью резонансного или колебательного контура, измерение частоты также приведет к общему изменению передаваемой электроэнергии.
Связь от приемника электроэнергии к передатчику электроэнергии достигается с помощью приемника электроэнергии, осуществляющего модуляцию нагрузки, при этом нагрузка, прикладываемая к индуктору приемника электроэнергии, изменяется, обеспечивая модуляцию сигнала питания. Результирующие изменения электрических характеристик (например, изменения амплитуды тока, протекающего по первичной катушке) могут быть обнаружены и демодулированы передатчиком электроэнергии.
Для модуляции нагрузки, сигнал передачи электроэнергии, генерируемый из индуктора передатчика, соответственно используют в качестве сигнала несущей для модуляции нагрузки, вносимой посредством изменений нагрузки сигнала передачи электроэнергии в приемнике электроэнергии. Чтобы обеспечить улучшенные рабочие характеристики передачи электроэнергии, необходимо, конечно же, чтобы надежность связи была как можно более высокой, а конкретно - чтобы вероятность ошибки на бит или на сообщение была минимизирована. Вместе с тем, рабочие характеристики модуляции нагрузки зависят от многих других рабочих характеристик, включая, например, частоту сигнала передачи электроэнергии, значения удельной нагрузки для нагрузок модуляции нагрузки, и т.д.
Чтобы оптимизировать рабочие характеристики связи, N.Y. Kim, S.-W. Yoon и C.-W. Kim в работе ʺFrequency-agile load-modulated magnetic resonance wireless power transfer system for reliable near-field in-band signalingʺ («Система беспроводной передачи электроэнергии с быстрой перестройкой по частоте, модуляцией нагрузки и магнитным резонансом для надежной внутриполосной передачи сигналов в ближнем поле»), Electronic Letters, том 49, № 24., стр. 1558-1559, 21 ноября 2013 г., предложили воплотить систему сопровождения по частоте, которая задает сигнал несущей частоте, которая оптимизирует глубину модуляции, измеренную как разность амплитуд напряжения для разных нагрузок приемника электроэнергии при модуляции нагрузки.
Вместе с тем, обнаружено, что такой подход, как правило, тоже ведет к недостаточно оптимальным рабочим характеристикам, и его результатом являются ошибки связи, которые негативно влияют на рабочие характеристики передачи электроэнергии. Помимо этого, коррекция частоты сигнала передачи электроэнергии на основе соображений связи в типичном случае невыполнима или нецелесообразна для эффективной системы передачи электроэнергии, где частоту зачастую нужно оптимизировать и/или динамически изменять, чтобы обеспечить желаемые процедуры и характеристики передачи электроэнергии.
Соответственно, должен оказаться выгодным усовершенствованный подход к передаче электроэнергии. В частности, должен оказаться выгодным подход, который обеспечивает улучшенную эксплуатацию, улучшенную передачу электроэнергии, повышенную гибкость применения, упрощенную реализацию, упрощенную эксплуатацию, улученную связь, сокращенные ошибки связи, особенно - при модуляции нагрузки, улучшенное управление электроэнергией и/или улучшенные рабочие характеристики. А именно, во многих сценариях было бы выгодно создать возможность надежной связи при увеличенном расстоянии между катушками приемника электроэнергии и передатчика электроэнергии, поскольку требуемое взаимодействие, вероятно, приведет к меньшей глубине демодуляции.
Сущность изобретения
Соответственно, изобретение направлено на предпочтительное смягчение, ослабление или исключение одного или нескольких из вышеупомянутых недостатков по отдельности или в любой комбинации.
В соответствии с аспектом изобретения, предложен передатчик электроэнергии для обеспечения передачи электроэнергии приемнику электроэнергии с использованием сигнала беспроводной индукционной передачи электроэнергии, причем передатчик электроэнергии содержит: индуктор передатчика для генерирования индуцированного сигнала несущей с целью модуляции нагрузки в ответ на сигнал напряжения возбуждения, подаваемый, по меньшей мере, на одно из индуктора передатчика и резонансного контура, содержащего индуктор передатчика; измерительный блок, выполненный с возможностью осуществления - в течение циклов опорного сигнала, синхронизированного с сигналом напряжения возбуждения, - первых измерений, по меньшей мере, одного из тока индуктора и напряжения индуктора для индуктора передатчика, причем каждое первое измерение происходит в течение интервала времени измерения, представляющего собой подмножество периода цикла опорного сигнала, и имеет первый временной сдвиг относительно опорного сигнала; адаптер для изменения первого временного сдвига и обнаружения оптимального сдвига тактирования измерений для изменяемого первого временного сдвига, причем оптимальный сдвиг тактирования измерений обнаруживают как временной сдвиг для изменяемого первого временного сдвига, который приводит к максимальной глубине демодуляции для глубины демодуляции, отражающей меру разности для первых измерений, генерируемых измерительным блоком с первым временным сдвигом при разных нагрузочных модуляциях индуцированного сигнала несущей; и демодулятор для демодуляции модуляции нагрузки индуцированного сигнала несущей из первых измерений с первым временным сдвигом, заданным равным оптимальному сдвигу тактирования измерений.
Изобретение может обеспечить улучшенную связь и/или улучшенную передачу электроэнергии. Во многих вариантах осуществления, оно может способствовать снижению вероятности ошибки для связи, осуществляемой с модуляцией нагрузки, от приемника электроэнергии к передатчику электроэнергии. Этот подход, в частности, может повысить надежность связи применительно к ошибкам управления электроэнергией, тем самым приводя к более точному управлению передачей электроэнергии.
Первые измерения в типичном случае могут быть проведены, по меньшей мере, один раз в каждом цикле опорного сигнала, или - в некоторых вариантах осуществления - могут быть проведены только для подмножества циклов опорного сигнала.
Опорный сигнал может быть синхронизирован с сигналом передачи электроэнергии, имея ту же самую частоту и фиксированный временной или фазовый сдвиг, а во многих сценариях - имея нулевой (ноль градусов) фазовый или временной сдвиг.
Глубина модуляции или глубина демодуляции может представлять собой разность между результатом первого измерения для первого состояния нагрузки согласно модуляции нагрузки и результатом первого измерения для второго состояния нагрузки согласно модуляции нагрузки. Во многих вариантах осуществления, модуляция нагрузки может быть проведена посредством переключения приемника между двумя состояниями нагрузки при модуляции нагрузки, например, такого, как посредством подсоединения и отсоединения конденсатора к индуктору приемника, имеющемуся в приемнике электроэнергии. В таких случаях, глубина демодуляции может представлять собой разность между первыми измерениями, являющуюся результатом двух состояний нагрузки. Глубина демодуляции может быть измерена как абсолютное или относительное значение, например, такое, как соотношение между измеренными значениями для двух состояний нагрузки. Определение глубины демодуляции может включать в себя фильтрацию нижних частот и/или усреднение. Например, глубину демодуляции можно генерировать путем сравнения версий первых измерений, подвергнутых фильтрации нижних частот, для разных состояний нагрузки, или можно генерировать, например, путем фильтрации нижних частот применительно к значениям глубины демодуляции, генерируемым из первых измерений, для разных состояний нагрузки.
Следует понимать, что можно использовать любую меру разности для первых измерений при разных нагрузочных модуляциях сигнала передачи электроэнергии. Конкретно, мера разности может отражать разность между средними значениями мягкого решения при демодуляции для разных нагрузок модуляции, соответствующих разным символам данных нагрузок модуляции. Во многих вариантах осуществления, мера разности может быть указанием разности между усредненными или подвергнутыми фильтрации нижних частот значениями напряжения индуктора или тока индуктора для разных нагрузок модуляции.
Во многих вариантах осуществления, символ данных может быть в прямом соответствии с состоянием нагрузки. В других вариантах осуществления, символ данных может быть образован последовательностью состояний нагрузки. В некоторых вариантах осуществления, глубина демодуляции может определяться совокупной разностью измеренных значений для последовательности или шаблона, т.е. глубина демодуляции может отражать разность совокупных измеренных значений для разных символов данных.
Оптимальный сдвиг тактирования измерений отражает / представляет собой значение сдвига тактирования, для которого определена / обнаружена максимальная глубина демодуляции.
Демодулировать модуляцию нагрузки можно в зависимости от применяемой конкретной модуляции нагрузки и - в частности - можно в зависимости от того, соответствует ли каждое состояние нагрузки символу данных или представлен ли символ данных множеством состояний нагрузки. Во многих вариантах осуществления, первые измерения можно сравнивать с ожидаемыми значениями для возможных символов данных или состояний нагрузки при модуляции нагрузки, а также можно выбирать те символы данных модуляции нагрузки / состояние нагрузки, для которых мера разности между первыми измерениями и ожидаемыми значениями минимизируется.
Таким образом, в некоторых вариантах осуществления, демодулятор может быть выполнен с возможностью сравнения первых измерений с ожидаемыми значениями для возможных символов данных модуляции нагрузки и с возможностью определения символа демодулированных данных в качестве символа данных модуляции нагрузки, для которого мера разности между первыми измерениями и ожидаемыми значениями минимальна.
Конкретно, демодулятор может быть выполнен с возможностью управления измерительным блоком для проведения первых измерений с относительным временным сдвигом, равным оптимальному сдвигу тактирования измерений.
Адаптер может быть выполнен с возможностью динамического обнаружения оптимального сдвига тактирования измерений. Адаптер может быть выполнен с возможностью динамического изменения первого временного сдвига и обнаружения оптимального сдвига тактирования измерений, а именно - с некоторой частотой обновления для первого временного сдвига (точнее говоря - в соответствии с новым обнаруженным сдвигом тактирования измерений), имеющей период менее 10 минут, 5 минут, 1 минуты, 10 секунд, 1 секунды или 0,5 секунды.
Адаптер может быть выполнен с возможностью (динамического) изменения первого временного сдвига и обнаружения оптимального сдвига тактирования измерений в процессе работы, а в частности - во время передачи электроэнергии (от передатчика электроэнергии к приемнику электроэнергии) или одновременно с ней и/или с демодуляцией модуляции нагрузки. Адаптер может быть выполнен с возможностью обнаружения максимальной глубины демодуляции путем обнаружения максимального значения измеренной глубины демодуляции, причем измеренную глубину демодуляции определяют в ответ на сравнение, по меньшей мере, одной первой меры для первой нагрузки модуляции и, по меньшей мере, одной первой меры для второй нагрузки модуляции (отличающейся от первой нагрузки модуляции).
Опорный сигнал представляет собой изменяющийся сигнал, имеющий изменения, которые синхронизированы с сигналом напряжения возбуждения. Синхронизация между сигналом напряжения возбуждения и опорным сигналом может быть осуществлена посредством фиксированного временного сдвига между повторениями сигналов. Первый временной сдвиг может быть измерен от момента времени, соответствующего некоторому заданному событию в каждом цикле или повторению опорного сигнала, до момента времени, соответствующего некоторому заданному событию для первого измерения. А именно, первый временной сдвиг может быть измерен от перехода через нуль, минимума (например, абсолютного) или максимума (например, абсолютного) опорного сигнала в цикле до начала, средней точки или конечной точки интервала измерения.
Индуцированный сигнал несущей может обеспечить электромагнитный сигнал, который может быть нагрузкой, модулируемой приемником электроэнергии таким образом, что изменения нагрузки в приемнике электроэнергии могут обуславливать отклонения тока и/или напряжения индуктора для индуктора передатчика.
В некоторых вариантах осуществления, индуцированный сигнал несущей может быть сигналом беспроводной индукционной передачи электроэнергии, а в дополнение к обеспечению несущей для модуляции нагрузки также может обеспечивать запитывание приемника электроэнергии, включая запитывание любой нагрузки, поддерживаемой приемником электроэнергии. В некоторых вариантах осуществления, индуцированный сигнал несущей и сигнал беспроводной индукционной передачи электроэнергии могут быть разными сигналами. В таких сценариях, сигнал беспроводной индукционной передачи электроэнергии может обеспечить электроэнергию для нагрузки приемника электроэнергии, тогда как индуцированный сигнал несущей может обеспечить электроэнергию только для модуляции нагрузки и/или - возможно - для запитывания некоторых или всех функциональных средств приемника электроэнергии.
В вариантах осуществления, в которых сигнал передачи электроэнергии и индуцированный сигнал несущей не являются одним и тем же сигналом, оба эти сигнала могут быть генерируемыми одним и тем же индуктором (т.е. индуктор передатчика можно использовать как в качестве индуктора для связи, так и в качестве индуктора для передачи электроэнергии). В других вариантах осуществления, оба эти сигнала могут быть генерируемыми разными индукторами, т.е. передатчик электроэнергии (а в типичном случае - и приемник электроэнергии) может содержать отдельные индукторы для передачи электроэнергии и связи.
Демодулятор может быть выполнен с возможностью демодулировать модуляцию нагрузки индуцированного сигнала несущей из первых измерений с первым временным сдвигом, заданным равным оптимальному сдвигу тактирования измерений, независимо от демодулируемого символа модуляции нагрузки. Оптимальный сдвиг тактирования измерений в общем случае не зависит от модуляции нагрузки и не претерпевает зависимые изменения при разных нагрузках модуляции. Первые временные сдвиги, используемые для демодуляции, могут быть одинаковыми для множества разных символов модуляции нагрузки.
В соответствии с не обязательно предусматриваемым признаком изобретения, адаптер выполнен с возможностью изменения длительности интервала времени измерения для определения оптимальной длительности измерения, приводящей к максимальной глубине демодуляции, а демодулятор выполнен с возможностью демодулировать модуляцию нагрузки из первых измерений с длительностью интервала времени измерения, соответствующей оптимальной длительности измерения.
Это может улучшить рабочие характеристики во многих сценариях и вариантах осуществления. В частности, это может привести к сокращенным ошибкам битов во многих сценариях, и/или может обеспечить улучшенную передачу электроэнергии.
В некоторых вариантах осуществления, глубину демодуляции можно нормализовать по длительности. Во многих вариантах осуществления, глубину демодуляции можно определять как относительную глубину демодуляции, например, такую, как соотношение между подвергнутыми фильтрации нижних частот значениями для первых измерений для каждых разных данных символов модуляции нагрузки или состояний нагрузки.
Адаптер может быть выполнен с возможностью изменения интервала времени изменения длительности интервала времени измерения для определения оптимальной длительности измерения, приводящей к максимальному отношению сигнал-шум, а демодулятор может быть выполнен с возможностью демодулировать модуляцию нагрузки из первых измерений с длительностью интервала времени измерения, заданной равной этой оптимальной длительности измерения.
Адаптер может быть выполнен с возможностью изменения длительности интервала времени измерения при определении оптимальной длительности измерения для изменяемой длительности, приводящей к максимальной глубине демодуляции (для глубины демодуляции, отражающей меру разности для первых измерений при разных нагрузках модуляции индуцированного сигнала несущей). Тогда демодулятор может быть выполнен с возможностью демодулировать модуляцию нагрузки из первых измерений с длительностью интервала времени измерения, соответствующей оптимальной длительности измерения (а именно, для которой была обнаружена (измеренная) максимальная глубина демодуляции).
Оптимальная длительность измерения отражает или представляет собой значение длительности измерения, для которого определена максимальная глубина демодуляции.
Во многих вариантах осуществления, каждое первое измерение представляет собой дискретизацию, по меньшей мере, одного из тока индуктора и напряжения индуктора.
Во многих вариантах осуществления это может улучшить рабочие характеристики и/или облегчить эксплуатацию. В частности, этот подход пригоден, например, для цифровых реализаций демодулятора и/или адаптера, таких, как реализация в виде микроконтроллера или процессора сигналов.
Во многих сценариях, демодуляция, основанная на случаях дискретизации, оптимизированной по глубине демодуляции, может обеспечить, в частности, выгодную и надежную демодуляцию.
В соответствии с предусматриваемым по выбору признаком изобретения, адаптер выполнен с возможностью реализации контура управления, выполненного с возможностью динамической адаптации оптимального сдвига тактирования измерений в ответ на измеренную глубину демодуляции, определяемую из первых измерений с первым временным сдвигом оптимального сдвига тактирования измерений.
Контур управления может обнаружить оптимальный сдвиг тактирования измерений путем обнаружения максимальной измеренной глубины демодуляции, о которой судят исходя из первых измерений. Тактирование, по меньшей мере, некоторых первых измерений, т.е., первый временной сдвиг, можно задать эквивалентным оптимальному сдвигу тактирования измерений.
В контуре управления, первый временной сдвиг, по меньшей мере, для некоторых первых измерений, используемых посредством адаптации, может быть определен путем оценки измеренной глубины демодуляции, определяемой из первых измерений.
В некоторых вариантах осуществления может быть определен разностный сигнал, отражающий разность между первой измеренной глубиной демодуляции, полученной из первых измерений с первым временным сдвигом оптимального сдвига тактирования измерений, и второй измеренной глубиной демодуляции, полученной из первых измерений с первым временным сдвигом, отличающимся от оптимального сдвига тактирования измерений. Тогда оптимальный сдвиг тактирования измерений можно определить в ответ на упомянутую разность.
Первый временной сдвиг для первых измерений, используемых для определения второй глубины демодуляции, можно изменять динамически. В некоторых вариантах осуществления, первый временной сдвиг в качестве первого временного сдвига для первых измерений может представлять собой фиксированный временной сдвиг относительно оптимального сдвига тактирования измерений.
Этот подход может обеспечить улучшенные рабочие характеристики, а в частности - повышенную надежность связи и меньшие ошибки демодуляции во многих вариантах осуществления. В контуре управления можно обеспечить динамическую (и зачастую - непрерывную) адаптацию к текущим рабочим условиям. Таким образом, можно адаптировать демодуляцию, а конкретно - тактирование измерений, на котором основана демодуляция, к динамическим изменениям, например, частоты, нагрузки и взаимодействия между передатчиком электроэнергии и приемником электроэнергии.
В соответствии с необязательно предусматриваемым признаком изобретения, первые измерения являются измерениями тока индуктора, а измерительный блок дополнительно выполнен с возможностью - для циклов опорного сигнала - проведения вторых измерений - напряжения индуктора, причем каждая вторая мера представляет собой второй временной интервал измерений, представляющий собой подмножество периода цикла опорного сигнала, и имеет второй временной сдвиг относительно опорного сигнала, адаптер выполнен с возможностью изменения второго временного сдвига для определения второго оптимального сдвига тактирования измерений, который приводит ко второй максимальной глубине демодуляции для глубины демодуляции, отражающей меру разности для вторых измерений при разных нагрузках модуляции индуцированного сигнала несущей, и демодулятор выполнен с возможностью демодулировать модуляцию нагрузки на основе вторых измерений со вторым временным сдвигом, заданным равным второму оптимальному сдвигу тактирования измерений.
Это может обеспечить существенно более точную и надежную связь, осуществляемую с модуляцией нагрузки, во многих вариантах осуществления и может, в частности, уменьшить вероятности ошибок на бит, например, для сообщений об ошибках управления электроэнергией, тем самым улучшая адаптацию и операцию передачи электроэнергии.
Индивидуальное управление тактированием и его оптимизация для измерений напряжения и тока индуктора обеспечивают более точную демодуляцию и основаны на осознании авторами изобретения того факта, что временные характеристики глубины демодуляции существенно изменяются для токов индукторов и напряжений индукторов.
Следует осознать, что можно использовать любую меру разности для вторых измерений при разных нагрузках модуляции сигнала передачи электроэнергии. Конкретно, мера разности может отражать разность между средними значениями мягкого решения при демодуляции для разных нагрузок модуляции, соответствующих разным символам данных модуляции нагрузки. Во многих вариантах осуществления, мера разности может быть указанием разности между усредненным или подвергнутым фильтрации нижних частот значением напряжения индуктора для разных нагрузок модуляции.
В соответствии с предусматриваемым по выбору признаком изобретения, измерительный блок выполнен с возможностью генерирования первых измерений тока индуктора и напряжения индуктора с разными временными сдвигами относительно опорного сигнала, и демодулятор выполнен с возможностью демодулировать модуляцию нагрузки из измерений как тока индуктора, так и напряжения индуктора.
Это может обеспечить существенно более точную и надежную связь, осуществляемую с модуляцией нагрузки, во многих вариантах осуществления и может, в частности уменьшить вероятности ошибок на бит, например, для сообщений об ошибках управления электроэнергией, тем самым улучшая адаптацию и операцию передачи электроэнергии.
Индивидуальное управление тактированием и его оптимизация для измерений напряжения и тока индуктора обеспечивают более точную демодуляцию и основаны на осознании авторами изобретения того факта, что временные характеристики глубины демодуляции существенно изменяются для токов индукторов и напряжений индукторов.
В соответствии с предусматриваемым по выбору признаком изобретения, опорный сигнал представляет собой одно из сигнала напряжения возбуждения и сигнала возбуждения для переключающей схемы, генерирующей сигнал напряжения возбуждения.
Это может обеспечить улучшенные рабочие характеристики и/или улучшенную реализацию во многих вариантах осуществления.
Опорный сигнал может быть сигналом переключения, который управляет переключением схемы возбуждения, такой, как инвертор, такой, как предназначенный для генерирования сигнала возбуждения индуктора. Конкретно, опорный сигнал или сигнал возбуждения может быть сигналом возбуждения, выдаваемым в переключающую схему, генерирующую сигнал напряжения для индуктора передатчика, имеющего такую же фазу и частоту, как переключающая схема.
В некоторых вариантах осуществления, опорный сигнал может быть сигналом напряжения индуктора. Опорный сигнал может иметь такую же частоту и фазу, как сигнал напряжения индуктора.
В соответствии с предусматриваемым по выбору признаком изобретения, индуцированный сигнал несущей представляет собой сигнал передачи электроэнергии.
Это может обеспечить улучшенную и/или упрощенную эксплуатацию во многих сценариях.
В соответствии с предусматриваемым по выбору признаком изобретения, передатчик электроэнергии дополнительно содержит адаптер передачи электроэнергии, выполненный с возможностью выбора частоты сигнала передачи электроэнергии на основе свойства передачи электроэнергии.
Это может существенно улучшить передачу электроэнергии во многих вариантах осуществления и может, в частности, обеспечить оптимизацию передачи электроэнергии и/или адаптацию передачи электроэнергии. Этот подход, связанный с частотой сигнала передачи электроэнергии, зависящей от характеристики передачи электроэнергии, может послужить прелюдией к оптимизации частоты в целях связи и может привести к неопределенности рабочей частоты, а значит и конкретных характеристик сигнала передачи электроэнергии, когда тот используется в качестве несущей для модуляции нагрузки. Описанный подход смягчает и компенсирует этот недостаток путем коррекции относительного тактирования и относительной фазы между сигналом передачи электроэнергии и измерениями для демодуляции модуляции нагрузки таким образом, что их можно оптимизировать для конкретной частоты, выбираемой в данный момент системой.
Этот подход может обеспечить адаптацию и к желаемой передаче электроэнергии, и к установлениям связи.
В соответствии с предусматриваемым по выбору признаком изобретения, адаптер передачи электроэнергии выполнен с возможностью изменения частоты сигнала передачи электроэнергии в ответ на сообщения об управлении электроэнергией, получаемые от приемника электроэнергии.
Этот подход может существенно улучшить рабочие характеристики в системах, где мощность сигнала передачи электроэнергии изменяется в ответ на сообщения об управлении электроэнергией от приемника электроэнергии. В таких системах, частота может изменяться, а в результате этого характеристики тактирования модуляции нагрузки также могут существенно изменяться. Соответственно, адаптация, а в частности - динамическая адаптация, тактирования измерений, используемая, чтобы демодулировать модуляцию нагрузки, может улучшить связь.
В соответствии с предусматриваемым по выбору признаком изобретения, адаптер передачи электроэнергии выполнен с возможностью инициирования определения оптимального сдвига тактирования измерений в ответ на изменение частоты индуцированного сигнала несущей.
Это может обеспечить улучшенные рабочие характеристики и обеспечить, например, управление электроэнергией при передаче электроэнергии для работы без нанесения ущерба требуемому объему информационного обмена с одновременным обеспечением динамической адаптации и оптимизации рабочих характеристик связи. Основное внимание при оптимизации и адаптации уделяется ситуациям, где характеристики могут рассматриваться как - наиболее вероятно - изменяющиеся, вследствие чего обеспечивается эффективная адаптация при сохранении низких требований по сложности и ресурсам.
В соответствии с предусматриваемым по выбору признаком изобретения, измерительный блок выполнен с возможностью проведения для каждого первого измерения - в пределах того же цикла опорного сигнала - второго измерения, по меньшей мере, одного из тока индуктора и напряжения индуктора, причем второе измерение происходит в интервалах времени измерения, имеющих тактирование, соответствующее интервалам времени измерения для первых измерений, но - с временным сдвигом на половину сдвига периода цикла относительно интервалов времени измерения для первых измерений, а демодулятор выполнен с возможностью демодулировать модуляцию нагрузки, как из первых измерений, так и из вторых измерений.
Это может обеспечить, в частности, эффективную работу и/или надежную связь во многих вариантах осуществления.
В некоторых вариантах осуществления, длительность интервала времени измерения не превышает половину периода времени или цикла опорного сигнала. Это может обеспечить улучшенные рабочие характеристики во многих вариантах осуществления.
В соответствии с предусматриваемым по выбору признаком изобретения, первые измерения являются измерениями тока индуктора, протекающего в индукторе передатчика.
Это может обеспечить улучшенные рабочие характеристики во многих вариантах осуществления. В частности, это может обеспечить адаптацию измерений тока индуктора при модуляции нагрузки к опорному сигналу, который синхронизирован с сигналом напряжения возбуждения для индуктора передатчика, тем самым обеспечивая адаптацию системы к отклонениям фазы между ними в зависимости от состояний нагрузки при модуляции нагрузки.
В соответствии с предусматриваемым по выбору признаком изобретения, первые измерения являются измерениями напряжения индуктора, прикладываемого к индуктору передатчика.
Это может обеспечить улучшенные рабочие характеристики во многих вариантах осуществления. В частности, это может обеспечить адаптацию измерений напряжения индуктора при модуляции нагрузки к опорному сигналу, который синхронизирован с сигналом напряжения возбуждения для индуктора передатчика, тем самым обеспечивая адаптацию системы к отклонениям фазы между ними в зависимости от состояний нагрузки при модуляции нагрузки.
В соответствии с предусматриваемым по выбору признаком изобретения, адаптер выполнен с возможностью инициирования определения оптимального сдвига тактирования измерений в ответ на обнаружение изменения нагрузки индуцированного сигнала несущей.
Это может обеспечить улучшенные рабочие характеристики и во многих вариантах осуществления может, в частности, повысить надежность связи. Таким образом, основное внимание при оптимизации и адаптации можно уделить ситуациям, где характеристики могут рассматриваться как - наиболее вероятно - изменяющиеся, вследствие чего обеспечивается эффективная адаптация при сохранении низких требований по сложности и ресурсам. Когда нагрузка сигнала питания изменяется, характеристики тактирования модуляции нагрузки могут существенно изменяться. Соответственно, адаптация, а в частности - динамическая адаптация тактирования измерений, используемая для того, чтобы демодулировать модуляцию нагрузки, может улучшить связь.
В соответствии с предусматриваемым по выбору признаком изобретения, адаптер выполнен с возможностью инициирования определения оптимального сдвига тактирования измерений в ответ на обнаружение изменения во взаимодействии между передатчиком электроэнергии и приемником электроэнергии.
Это может обеспечить улучшенные рабочие характеристики и во многих вариантах осуществления может, в частности, повысить надежность связи. Таким образом, основное внимание при оптимизации и адаптации можно уделить ситуациям, где характеристики могут рассматриваться как - наиболее вероятно - изменяющиеся, вследствие чего обеспечивается эффективная адаптация при сохранении низких требований по сложности и ресурсам. Когда взаимодействие между передатчиком электроэнергии и приемником электроэнергии изменяется, характеристики тактирования модуляции нагрузки могут существенно изменяться. Соответственно, адаптация, а в частности - динамическая адаптация тактирования измерений, используемая для демодуляции модуляции нагрузки, может улучшить связь.
В соответствии с аспектом изобретения предложен способ эксплуатации передатчика электроэнергии, выполненного с возможностью передачи электроэнергии приемнику электроэнергии с использованием сигнала беспроводной индукционной передачи электроэнергии, причем способ заключается в том, что: генерируют посредством индуктора передатчика индуцированный сигнал несущей для модуляции нагрузки в ответ на сигнал возбуждения напряжения, подаваемый, по меньшей мере, на одно из индуктора передатчика и резонансного контура, содержащего индуктор передатчика; для циклов опорного сигнала, синхронизируемого с сигналом напряжения возбуждения, проводят первые измерения, по меньшей мере, одного из тока индуктора и напряжения индуктора для индуктора передатчика, причем каждое первое измерение проводят на протяжении интервала времени измерения, который представляет собой подмножество периода цикла опорного сигнала, а упомянутое измерение имеет первый временной сдвиг относительно опорного сигнала; изменяют первый временной сдвиг и обнаруживают оптимальный сдвиг тактирования измерений для изменяющегося первого временного сдвига, приводящего к максимальной глубине демодуляции для глубины демодуляции, отражающей меру разности для первых измерений при разных нагрузках модуляции индуцированного сигнала несущей; и демодулируют модуляцию нагрузки индуцированного сигнала несущей из первых измерений с первым временным сдвигом, заданным равным оптимальному сдвигу тактирования измерений.
Эти и другие аспекты, признаки и преимущества изобретения можно будет понять и уяснить, обратившись к варианту осуществления, описываемому (вариантам осуществления, описываемым) ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описаны лишь в качестве примера и со ссылками на чертежи, при этом:
На фиг.1 изображен пример элементов системы передачи электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.2 изображен пример элементов системы передачи электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.3 изображен пример элементов передатчика электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.4 изображен пример элементов полумостового инвертора для передатчика электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.5 изображен пример элементов мостового инвертора для передатчика электроэнергии в соответствии с некоторыми вариантами осуществления изобретения; и
на фиг.6 изображен пример параметров системы передачи электроэнергии как функции частоты сигнала передачи электроэнергии;
на фиг.7-9 изображены примеры токов катушки для катушки передатчика электроэнергии при разных сценариях для системы передачи электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.10 изображен пример элементов системы передачи электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.11 изображен пример элементов блока демодуляции для передатчика электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.12-14 изображены примеры сигналов для передатчика электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.15 изображен пример глубины демодуляции как функции сдвига тактирования для передатчика электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.16-23 изображены примеры операций системы передачи электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.24 изображен пример элементов блока демодуляции для передатчика электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.25 изображен пример элементов системы передачи электроэнергии в соответствии с некоторыми вариантами осуществления изобретения;
на фиг.26-32 изображены примеры операций системы передачи электроэнергии в соответствии с некоторыми вариантами осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В нижеследующем описании основное внимание уделяется вариантам осуществления изобретения, применимым к беспроводной системе передачи электроэнергии, предусматривающей использование подхода к передаче электроэнергии, аналогичного спецификации стандарта Qi. Вместе с тем, следует понимать, что изобретение этим применением не ограничивается, а применимо к любым другим системам беспроводной передачи электроэнергии.
В спецификации стандарта Qi оговаривается, что связь от приемника электроэнергии к передатчику электроэнергии в общем случае осуществляется посредством приемника электроэнергии, осуществляющего модуляцию нагрузки сигнала передачи электроэнергии. Соответственно, основное внимание в нижеследующем описании будет уделено примеру, где модуляция нагрузки представляет собой модуляцию сигнала передачи электроэнергии, и соответственно где сигнал передачи электроэнергии также используется как индуцированный сигнал несущей для модуляции нагрузки. Поэтому в рассматриваемом примере демодуляция данных, сообщаемых посредством модуляции нагрузки из приемника электроэнергии, осуществляется путем измерения изменений в результирующих изменениях напряжений и/или токов индуктора, генерирующего сигнал передачи электроэнергии.
Вместе с тем, следует понимать, что в других вариантах осуществления индуцированный сигнал несущей, используемый для модуляции нагрузки, может отличаться от сигнала передачи электроэнергии, используемого для передачи электроэнергии к приемнику электроэнергии. Например, в некоторых вариантах осуществления, передатчик электроэнергии может содержать индуктор для передачи электроэнергии, который генерирует сигнал передачи электроэнергии, обеспечивающий электроэнергию для приемника электроэнергии, и отдельный индуктор связи, который генерирует индуцированный сигнал несущей, который может быть использован приемником электроэнергии для модуляции нагрузки. В этом примере, демодуляция данных, сообщаемых посредством модуляции нагрузки из приемника электроэнергии, является результатом измерений результирующих изменений напряжения и/или тока индуктора связи.
На фиг.1 изображен пример системы передачи электроэнергии в соответствии с некоторыми вариантами осуществления изобретения. Система передачи электроэнергии содержит передатчик 101 электроэнергии, который включает в себя катушку / индуктор 103 передатчика (или подключен к ней / к нему). Система дополнительно содержит приемник 105 электроэнергии, который включает в себя катушку / индуктор 107 приемника (или подключен к ней / к нему).
Система обеспечивает беспроводную индукционную передачу электроэнергии от передатчика 101 электроэнергии к приемнику 105 электроэнергии. Конкретно, передатчик 101 электроэнергии генерирует беспроводной индуцированный сигнал питания (также именуемый для краткости сигналом питания или индуцированным сигналом питания), которой распространяется как магнитный поток катушкой 103 передатчика. В типичном случае, сигнал питания может иметь частоту примерно между 20 кГц и 200 кГц. Катушка 103 передатчика и индуктор / катушка 107 приемника взаимодействуют слабо, и поэтому индуктор 107 приемника принимает сигнал питания (по меньшей мере, его часть) из передатчика 101 электроэнергии. Таким образом, электроэнергия передается от передатчика 101 электроэнергии к приемнику 105 электроэнергии за счет беспроводной индуктивной связи катушки 103 передатчика с катушкой 107 приемника. Термин «сигнал питания» употребляется главным образом как обозначающий индукционный сигнал / магнитное поле между катушкой 103 передатчика и катушкой 107 приемника (сигнал магнитного потока), но следует понимать, что его с тем же успехом можно рассматривать и употреблять как обозначающий электрический сигнал, выдаваемый в катушку 103 передатчика или принимаемый катушкой 107 приемника.
В рассматриваемом примере, сигнал передачи электроэнергии имеет несколько функций, заключающихся в том, что он не только обеспечивает подвод электроэнергии к приемнику электроэнергии (и к любой нагрузке, поддерживаемой приемником электроэнергии), но и функционирует как индуцированный сигнал несущей для модуляции нагрузки.
В системе согласно фиг.1, магнитное поле генерируется катушкой 103 передатчика, а катушка 107 приемника находится в пределах этого магнитного поля. Таким образом, изменения, вносимые в магнитный поток катушкой 103 передатчика, приводят к индуцированию тока в катушке 107 приемника, вследствие чего и происходит передача электроэнергии.
Работа передатчика 101 электроэнергии и приемника 105 электроэнергии будет описана ниже со ссылками конкретно на вариант осуществления в соответствии со стандартом Qi (за исключением описываемых здесь (или возможных впоследствии) модификаций и усовершенствований). В частности, передатчик 101 электроэнергии и приемник 105 электроэнергии могут быть, по существу, совместимыми с версией 1.0 или 1.1 спецификации стандарта Qi (за исключением описываемых здесь (или возможных впоследствии) модификаций и усовершенствований).
На фиг.2 архитектура системы согласно конкретному примеру системы согласно фиг.1 изображена несколько подробнее. В этом примере, выходная цепь передатчика 101 электроэнергии включает в себя резонансный контур или колебательный контур 201, который включает в себя индуктор 103 передатчика (на фиг.2, индуктор 103 передатчика для ясности показан снаружи резонансного контура 201, но считается его частью). В типичном случае, резонансный контур 201 может быть последовательным или параллельным резонансным контуром и может, в частности, предусматривать наличие резонансного конденсатора, подключенного к индуктору 103 передатчика параллельно (или последовательно). Сигнал передачи электроэнергии генерируется посредством возбуждения выходного резонансного контура от схемы 203 возбуждения, генерирующей сигнал возбуждения с подходящей частотой (в типичном случае находящейся в диапазоне частот 20-200 кГц).
Аналогичным образом, входная цепь приемника 105 электроэнергии включает в себя резонансный контур или колебательный контур 205, который включает в себя индуктор 107 приемника (на фиг.2, индуктор 107 приемника для ясности показан снаружи резонансного контура 205, но считается его частью). В типичном случае, резонансный контур 205 может быть последовательным или параллельным резонансным контуром и может, в частности, предусматривать наличие резонансного конденсатора, подключенного к индуктору 107 приемника параллельно (или последовательно). Резонансный контур 205 подключен к преобразователю 207 электроэнергии, который преобразует принимаемый сигнал передачи электроэнергии, т.е. индукционный сигнал, выдаваемый резонансным контуром 205 приемника, в электроэнергию, которая подводится к внешней нагрузке 209 (в типичном случае - посредством проведения преобразования переменного тока в постоянный, которое должно быть хорошо известно специалисту). В типичном случае, оба резонансных контура 201, 205 имеют резонансные частоты, близкие друг к другу, чтобы достичь достаточной амплитуды сигнала в приемнике 105 электроэнергии.
Для управления передачей электроэнергии, система может проходить через разные фазы, в частности, фазу выбора, пинг-фазу, фазу идентификации и конфигурации, а также фазу передачи электроэнергии. Больше информации можно найти в главе 5 части 1 спецификации стандарта Qi на беспроводную передачу электроэнергии.
Например, при установлении связи с первым приемником 105 электроэнергии, передатчик 101 электроэнергии сначала может находиться в фазе выбора, в которой он просто осуществляет оперативный контроль на предмет потенциального присутствия приемника электроэнергии. В передатчике 101 электроэнергии возможно использование многообразия способов с этой целью, например, таких, как описанные в спецификации стандарта Qi на беспроводную передачу электроэнергии. Если такое потенциальное присутствие обнаруживается, передатчик 101 электроэнергии входит в пинг-фазу, в которой временно генерируется сигнал питания. Приемник 105 электроэнергии может подавать принимаемый сигнал для подключения питания к своей электронике. После приема сигнала питания, приемник 105 электроэнергии передает начальный пакет в передатчик 101 электроэнергии. Конкретно, происходит передача пакета информации об уровне сигнала, указывающей степень взаимодействия между передатчиком 101 электроэнергии и приемником 105 электроэнергии. Больше информации можно найти в главе 6.3.1 части 1 спецификации стандарта Qi на беспроводную передачу электроэнергии. Таким образом, в пинг-фазе определяют, присутствует ли приемник 105 электроэнергии на интерфейсе передатчика 101 электроэнергии.
После приема сообщения об уровне сигнала, передатчик 101 электроэнергии переходит в фазу идентификации и конфигурации. В этой фазе, приемник 105 электроэнергии сохраняет свою выходную нагрузку отсоединенной и осуществляет связь с передатчиком 101 электроэнергии, используя модуляцию нагрузки. С этой целью, передатчик электроэнергии выдает сигнал питания постоянной амплитуды, частоты и фазы (за исключением изменения, обуславливаемого модуляцией нагрузки). Сообщения используются передатчиком 101 электроэнергии для самоконфигурации по запросу приемника 105 электроэнергии.
После фазы идентификации и конфигурации, система переходит в фазу передачи электроэнергии, в которой имеет место реальная передача электроэнергии. Конкретно, сообщив о своем потреблении электроэнергии, приемник 105 электроэнергии соединяется с выходной нагрузкой и снабжает ее принимаемой электроэнергией. Приемник 105 электроэнергии оперативно контролирует выходную нагрузку и измеряет ошибку управления между фактическим значением и желаемым значением в некоторой определенной рабочей точке. Он сообщает такие ошибки управления передатчику 101 электроэнергии на минимальной скорости передачи, например - каждые 250 мс, чтобы указать передатчику 101 электроэнергии на эти ошибки, а также на необходимость изменения сигнала питания или отсутствие таковой.
Таким образом, чтобы подготовить передачу электроэнергии между передатчиком 101 электроэнергии и приемником 105 электроэнергии в беспроводной системе передачи электроэнергии и управлять этой передачей, приемник 105 электроэнергии сообщает информацию передатчику 101 электроэнергии. Такая связь стандартизирована в спецификации согласно версиям 1.0 и 1.1 стандарта Qi.
На физическом уровне, канал связи от приемника 105 электроэнергии к передатчику 101 электроэнергии реализуется путем использования беспроводного индуцированного сигнала питания в качестве беспроводной индуцируемой несущей. Приемник 105 электроэнергии передает информационные сообщения посредством модуляции нагрузки катушки 107 приемника. Это приводит к соответствующим изменениям сигнала питания на стороне передатчика электроэнергии. Модуляцию нагрузки можно обнаружить с помощью изменения амплитуды и/или фазы тока катушки передатчика, или - в качестве альтернативного или дополнительного варианта - с помощью изменения напряжения катушки 103 передатчика. На основе этого принципа, приемник 105 электроэнергии может модулировать данные, которые затем сможет демодулировать передатчик 101 электроэнергии. Эти данные отформатированы в байтах и пакетах. Больше информации можно найти в документе «Описание системы. Беспроводная передача электроэнергии. Том I: Малая мощность. Версия 1.0. Июль 2010», который опубликован Консорциумом беспроводной электромагнитной энергии и который можно найти по адресу http://www.wirelesspowerconsortium.conVdownloads/wireless-power-specification-part-1.html, а также называется «Спецификацией беспроводной передачи электроэнергии», см., в частности главу 6: «Интерфейс связи» (или в последующих версиях этой спецификации).
В рассматриваемом примере, сигнал передачи электроэнергии соответственно представляет собой также индуцированный сигнал несущей для модуляции нагрузки. Вместе с тем, следует понимать, что в других вариантах осуществления передача электроэнергии и модуляция нагрузки могут быть раздельными и основанными, например, на других индуцируемых или электромагнитных сигналах, генерируемых отдельными индукторами.
В нижеследующем примере, где сигнал передачи электроэнергии также используется для модуляции нагрузки, сигнал передачи электроэнергии соответственно также представляет собой индуцированный сигнал несущей для модуляции нагрузки. Вместе с тем, для краткости и ясности, этот сигнал будет именоваться сигналом передачи электроэнергии.
В компоновке согласно фиг.1, приемник 105 электроэнергии таким образом подвергает модуляции нагрузкой сигнал беспроводной индукционной передачи электроэнергии. Приемник 105 электроэнергии может делать это, например, путем подсоединения и отсоединения конденсатора, подключаемого параллельно к катушке 107 приемника, тем самым изменяя резонанс, а значит и характеристики нагрузки приемника 105 электроэнергии. Эти изменения приводят к изменениям тока индуктора и напряжения индуктора 103 передатчика, и эти изменения обнаруживаются передатчиком 101 электроэнергии и используются, чтобы демодулировать данные модуляции нагрузки из приемника 105 электроэнергии.
А именно, модуляция нагрузки используется для адаптации передачи электроэнергии, в частности - для реализации контура управления электроэнергией, который непрерывно адаптирует уровень передаваемой электроэнергии на основе сообщений об управлении электроэнергией, принимаемых из приемника 105 электроэнергии за счет модуляции нагрузки.
Таким образом, передатчик 101 электроэнергии может быть выполнен с возможностью адаптации электроэнергии, которую он передает приемнику 105 электроэнергии, в зависимости от внешних параметров, таких, как параметры взаимодействия между катушками 103, 107 приемника и передатчика, и т.д. Во многих вариантах осуществления, эту адаптацию можно осуществить путем модификации рабочей частоты сигнала передачи электроэнергии. Например, уводя рабочую частоту дальше от резонансных частот резонансных контуров 201, 205, электроэнергию, получаемую приемником 105 электроэнергии, уменьшают, а подводя рабочую частоту ближе к резонансным частотам резонансных контуров 201, 205, электроэнергию, получаемую приемником 105 электроэнергии, увеличивают.
Чтобы добиться эффективных рабочих характеристик, важно обеспечить связь от приемника 105 электроэнергии к передатчику 101 электроэнергии, осуществляемую с модуляцией нагрузки при высоких рабочих характеристиках. Вместе с тем, в обычной системе передачи электроэнергии системы, связь, как правило, не оптимальна в некоторых сценариях и ситуациях, что приводит к увеличенным ошибкам связи и не оптимальным рабочим характеристикам передачи электроэнергии. Это замечание особенно уместно, когда взаимодействие между передатчиком электроэнергии и приемником электроэнергии является слабым.
На фиг.3 изображены некоторые возможные элементы передатчика 101 электроэнергии согласно фиг.1. Передатчик 101 электроэнергии включает в себя функциональные средства для улучшения рабочих характеристик связи, а именно - для адаптации связи и операции демодуляции к текущим характеристикам.
На фиг.3 изображена схема 301 возбуждения, которая подключена к резонансному контуру 303 передатчика, содержащему катушку 103 передатчика и резонансный конденсатор 305. Схема 301 возбуждения генерирует изменяющийся сигнал напряжения возбуждения, как правило - переменного тока, подаваемый в резонансный конденсатор 305 и катушку 103 приемника. В других вариантах осуществления, резонансный контур 303 передатчика может быть последовательным резонансным контуром, а сигнал напряжения возбуждения можно подавать в конденсатор и индуктор (тем самым также обеспечивая сигнал возбуждения для катушки 103 передатчика). В некоторых вариантах осуществления, схема возбуждения может быть подключена непосредственно (или не напрямую) к катушке 103 передатчика, а сигнал напряжения возбуждения можно выдавать в катушку 103 передатчика (это применимо как для вариантов осуществления, в которых катушка 103 передатчика является частью резонансного контура, так и для вариантов осуществления, в которых это не так (например, таких, как предусматривающие подключение единственной катушки 103 передатчика непосредственно к схеме 301 возбуждения без каких-либо других компонентов, являющихся частью выходной цепи)).
Таким образом, схема 301 возбуждения в системе генерирует сигнал возбуждения напряжения, который подается в резонансный контур 303 передатчика или катушку 103 передатчика, заставляя катушку 103 передатчика генерировать сигнал передачи электроэнергии, подводящий электроэнергию к приемнику 105 электроэнергии.
Схема 301 возбуждения генерирует ток и напряжение, которые подаются в катушку 103 передатчика. Схема 301 возбуждения в типичном случае представляет собой схему возбуждения в виде инвертора, который генерирует переменный сигнал из напряжения постоянного тока. На фиг.4 показан полумостовой инвертор. Управление переключателями S1 и S2 осуществляется так, что они никогда не замыкаются одновременно. В альтернативном варианте, переключатель S1 замкнут, когда переключатель S2 разомкнут, а переключатель S2 замкнут, когда переключатель S1 разомкнут. Переключатели размыкаются и замыкаются с желаемой частотой, тем самым, генерируя переменный сигнал на выходе. В типичном случае, выход инвертора соединен с катушкой передатчика через резонансный конденсатор. На фиг.5 показан мостовой инвертор. Управление переключателями S1 и S2 осуществляется так, что они никогда не замыкаются одновременно. Управление переключателями S3 и S4 осуществляется так, что они никогда не замыкаются одновременно. В альтернативном варианте, переключатели S1 и S4 замкнуты, когда переключатели S2 и S3 разомкнуты, а потом переключатели S2 и S3 замкнуты, когда переключатели S1 и S4 разомкнуты, вследствие чего на выходе создается сигнал блочной волны. Переключатели размыкаются и замыкаются с желаемой частотой.
Схема 301 возбуждения подключена к контроллеру 307 передатчика, который содержит функциональные средства управления для выполнения функции передачи электроэнергии и который в конкретном случае может представлять собой контроллер, выполненный с возможностью приведения передатчика 101 электроэнергии в действие в соответствии со спецификацией стандарта Qi, если это уместно. Например, контроллер 307 передатчика может быть выполнен с возможностью управления передатчиком 101 электроэнергии с целью проведения разных фаз, соответствующих стандарту Qi, включая фазу идентификации и конфигурации и фазу передачи электроэнергии.
В рассматриваемом примере передатчик 101 электроэнергии содержит единственную катушку 103 приемника, которую возбуждает схема 301 возбуждения. Таким образом, беспроводной индуцированный сигнал питания генерируется единственной катушкой 103 приемника. Вместе с тем, следует понимать, что в других вариантах осуществления беспроводной индуцированный сигнал питания может генерироваться множеством катушек передатчиков, возбуждаемых, например, параллельно схемой возбуждения. А именно, для генерирования беспроводного индуцированного сигнала питания можно использовать несколько катушек передатчиков, возбуждаемых соответствующими (зависимыми) выходными сигналами схемы 301 возбуждения. Например, для обеспечения двух точек зарядки для двух приемников электроэнергии можно разместить две катушки передатчиков в разных положениях. Эти две катушки можно запитывать одним и тем же выходным сигналом из схемы 301 возбуждения. Это может обеспечить улучшенное распределение беспроводного индуцированного сигнала питания / магнитного поля для поддержки нескольких точек зарядки.
Передатчик 101 электроэнергии дополнительно содержит демодулятор 309, который выполнен с возможностью приема информационных сообщений из приемника 105 электроэнергии. А именно, демодулятор 309 выполнен с возможностью демодулировать модуляцию нагрузки беспроводного индуцированного сигнала питания для определения соответствующих данных, передаваемых из приемника 105 электроэнергии.
Демодулятор 309 выполнен с возможностью демодулировать модуляцию нагрузки путем обнаружения изменений тока, протекающего через катушку 103 передатчика, и/или напряжения на катушке 103 передатчика.
Соответственно, демодулятор 309 подключен к измерительному блоку 311, который выполнен с возможностью измерения, по меньшей мере, одного из тока индуктора, протекающего через катушку 103 передатчика, и напряжения индуктора на катушке 103 передатчика.
В некоторых вариантах осуществления, ток и/или напряжение индуктора могут быть определены непосредственно, например, путем измерения измерений тока, подаваемого в инвертор схемы 301 возбуждения, и т.д. Вместе с тем, в конкретном примере, ток или напряжение индуктора определяют путем прямого измерения тока или напряжения индуктора.
В нижеследующем описании основное внимание будет уделено обнаружению и демодуляции на основе тока индуктора, но следует понимать, что в альтернативном или дополнительном варианте обнаружение и демодуляцию можно проводить на основе напряжения катушки 103 передатчика.
Измерительный блок 311 выполнен с возможностью проведения измерений (также именуемых первыми измерениями) по меньшей мере, одного из тока индуктора и напряжения индуктора для индуктора 103 передатчика. Эти измерения проводятся как дискретизация тока и/или напряжения индуктора, или - в некоторых вариантах осуществления - могут быть проведены на протяжении более длительных интервалов времени. В нижеследующем описании основное внимание будет уделено в первую очередь примерам, в которых измерения соответствуют дискретизации тока и/или напряжения индуктора.
Измерения синхронизированы с сигналом напряжения возбуждения. Сигнал передачи беспроводной электроэнергии (по своей природе) синхронизирован с сигналом возбуждения из схемы возбуждения. Аналогичным образом, сигнал беспроводной передачи электроэнергии и сигнал напряжения возбуждения (по своей природе) синхронизированы с переключением сигнала возбуждения, выдаваемого в схему 301 возбуждения. Таким образом, измерения синхронизированы с сигналом передачи электроэнергии, сигналом возбуждения и с сигналом переключаемого возбуждения.
Измерительный блок 311 выполнен с возможностью проведения измерений тока или напряжение индуктора с временным сдвигом относительно опорного сигнала, который синхронизирован с сигналом напряжения возбуждения, и потому также синхронизирован с сигналом переключаемого возбуждения и сигналом передачи электроэнергии. Опорный сигнал будет иметь такую же частоту, как сигнал возбуждения, и фиксированный временной или фазовый сдвиг относительно него. В самом деле, временной или фазовый сдвиг может быть нулевым, и в действительности опорный сигнал может быть сигналом возбуждения или самим сигналом переключаемого возбуждения, или может быть, например, генерируемым из одного из них. Таким образом, потребность в генерировании отдельного опорного сигнала отпадает.
Затем измерения синхронизируют с опорным сигналом за счет наличия относительного временного сдвига или - что эквивалентно - фазового сдвига относительно него (термины «временной сдвиг» и «фазовый сдвиг» будут рассматриваться как эквивалентные в соответствии со стандартным употреблением в данной области техники, хотя следует отметить, что прямое соответствие не является единственно применимым, когда рассматривают единственную частоту).
Сдвиг тактирования может быть измерен от некоторого момента в цикле опорного сигнала в интервале измерения, например, от такого, как максимум, минимум, переход через нуль в положительном направлении или переход через нуль в отрицательном направлении, до начала, средины или конца временного интервала измерения в одном и том же цикле. Следует иметь в виду, что конкретный подход к измерению временного сдвига может изменяться между разными вариантами осуществления и что в рамках изобретения можно использовать любой пригодный подход.
Измерительный блок 311 выполнен с возможностью проведения первых измерений для циклов опорного сигнала (а значит - и для циклов сигнала возбуждения или сигнала переключаемого возбуждения). Как упоминалось, каждое измерение может соответствовать единственной выборке или может быть измерением на протяжении более длительного интервала времени. Вместе с тем, временной интервал измерения для каждого измерения не превышает период времени либо время / длительность цикла опорного сигнала (либо сигнала возбуждения или сигнала переключаемого возбуждения).
Во многих вариантах осуществления, измерительный блок 311 может быть выполнен с возможностью генерировать измерение для каждого цикла опорного сигнала. Вместе с тем, следует понимать, что в некоторых вариантах осуществления измерения будут проводиться лишь для подмножества циклов, например, такого, как включающего в себя лишь каждый второй или третий цикл.
Измерительный блок 311 генерирует измерения, которые зависят от тока или напряжения индуктора, либо являются их отражением. Поскольку это значение зависит от нагрузки сигнала передачи электроэнергии, выдаваемого приемником 105 электроэнергии, изменения нагрузки, вносимые модуляцией нагрузки, будут отражаться в измерениях. Соответственно, измерения подаются в демодулятор 309, который переходит к демодуляции данных модуляции нагрузки на основе этих измерений. А именно, демодулятор может усреднять измерения по периоду символов данных и в зависимости от усредненного значения принять решение о том, какие состояния нагрузки присутствуют, а значит - и прием каких данных происходит.
Измерения, проводимые в системе, представляют собой не просто произвольное измерение обычной амплитуды тока или напряжения индуктора. Эти измерения скорее представляют собой синхронизированные измерения, в которых учитывается лишь подмножество периода времени или времени цикла для опорного сигнала и сигнал передачи электроэнергии. Таким образом, вместо обнаружения амплитуды или пика выборки, измерения учитывают лишь условия для подмножества периода времени. Помимо этого, управление учитываемым конкретным временным интервал осуществляют по временному сдвигу относительно опорного сигнала.
Передатчик 101 электроэнергии согласно фиг.3 дополнительно содержит адаптер 313, который выполнен с возможностью определения и установления относительного временного сдвига между опорным сигналом и измерениями. Соответственно, он (в типичном случае) выполнен с возможностью динамической адаптации к той части сигнала передачи электроэнергии, которая используется для демодуляции, а конкретно - для адаптации к временному интервалу тока или напряжения индуктора, учитываемому для того, чтобы демодулировать модуляцию нагрузки от приемника 101 электроэнергии.
Этот учет тока или напряжения индуктора лишь в динамически адаптируемом или выбираемом подмножестве временного периода обеспечивает улучшенную демодуляцию со сниженной частотой появления ошибок. В самом деле, адаптер 313 выполнен с возможностью определения относительного временного сдвига измерений таким образом, что это приводит к максимальной глубине демодуляции.
Адаптер 313 выполнен с возможностью изменения относительного временного сдвига, также именуемого первым временным сдвигом, и установления его соответствующим оптимальному сдвигу тактирования измерений, который соответствует максимальной глубине демодуляции.
Глубина демодуляции отражает разность измерений между измерениями при разных нагрузках модуляции сигнала передачи электроэнергии. Таким образом, для некоторого заданного относительного временного сдвига, измерительный блок 311 продемонстрирует тенденцию к измерению первого значения, когда приемник электроэнергии оказывается в одном состоянии нагрузки, и второго значения, когда приемник электроэнергии оказывается во втором состоянии нагрузки (это разные состояния нагрузки, соответствующие, например, нагрузочному конденсатору, подсоединяемому или отсоединяемому, соответственно). При этом проявится тенденция к тому, что первое и второе значения окажутся разными, и именно эта разность обеспечивает дифференциацию модуляции нагрузки демодулятором 309. Эта разность значений, являющихся результатами измерений (например, различие с некоторой последующей обработкой, такой, как фильтрация или усреднение) и используемых для демодуляции демодулятором 309, отображает глубину или разность демодуляции. Чем больше эта разность, тем больше глубина демодуляции.
Вместе с тем, разность между измерениями, а значит - и глубина демодуляции, может зависеть от части цикла, в котором учитывается ток или напряжение индуктора. В системе согласно фиг.3 адаптер 313 выполнен с возможностью изменения относительного временного сдвига, также именуемого первым временным сдвигом, между опорным сигналом и измерениями, т.е., он может изменяться, когда в цикле измеряют ток / напряжение индуктора. Помимо этого, адаптер 313 обнаруживает, когда глубина демодуляции является наибольшей, в частности, он может определить, когда разность между двумя состояниями нагрузки максимальна. Упомянутый соответствующий временной сдвиг рассматривается как оптимальный сдвиг тактирования измерений, так как он приводит к максимальной глубине демодуляции. Адаптер 313 может определять этот оптимальный сдвиг тактирования измерений и возвращать его в измерительный блок 311 и/или демодулятор 309, который затем перейдет к генерированию первых измерений с этим относительным временным сдвигом и станет демодулировать модуляцию нагрузки на основе синхронизированных по времени измерений, приводящих к максимальной глубине демодуляции, а значит - и к максимальной дифференциации между измерениями при разных состояниях нагрузки.
Таким образом, адаптер 313 выполнен с возможностью изменения первого временного сдвига таким образом, что он устанавливается соответствующим оптимальному сдвигу тактирования измерений, который соответствует максимальной глубине демодуляции. Адаптер 313 может изменять первый временной сдвиг и непрерывно определять или измерять глубину демодуляции для разных значений первого временного сдвига. Затем он может обнаруживать временной сдвиг, для которого глубина демодуляции максимальна. Тогда временной сдвиг, используемый для демодуляции, устанавливают равным этому временному сдвигу. Адаптер 313 выполнен с возможностью динамического изменения первого временного сдвига с целью определения оптимального сдвига тактирования измерений, для которого обнаруживается максимальная глубина демодуляции. Таким образом, адаптер 313 может динамически, а во многих вариантах осуществления - непрерывно, адаптировать тактирование измерений, используемое для демодуляции нагрузки таким образом, чтобы адаптировать к конкретным условиям, которые действуют в данный момент. Например, адаптер 313 может динамически адаптировать сдвиг тактирования измерения (первого временной сдвиг) во время передачи электроэнергии. Соответственно, возможна адаптация к конкретной нагрузке, частоте, или взаимодействию между приемником электроэнергии и передатчиком электроэнергии.
В качестве примера отметим, что измерительный блок 311 может медленно сканировать сдвиг тактирования от нулевого до равного полному временному периоду опорного сигнала. Во время этого сканирования, приемник 105 электроэнергии может быть установлен в одно состояние нагрузки с модуляцией нагрузки, например, такое, как с соединенным конденсатором модуляции нагрузки. Измерительный блок 311 может проводить измерения при разных сдвигах тактирования. Затем процесс можно повторить, но в этот раз - с приемником 105 электроэнергии, установленным в другое состояние нагрузки с модуляцией нагрузки, например, такое, как с отсоединенным конденсатором модуляции нагрузки. Измерительный блок 311 может опять провести измерения при разных сдвигах тактирования. Для каждого сдвига тактирования, глубину демодуляции можно определить путем вычитания значений, измеренных при первом сканировании и втором сканировании. Тогда оптимальный сдвиг тактирования можно установить равным значению, при котором обнаружена наибольшая глубина демодуляции. Тогда это значение можно использовать впоследствии для генерирования измерений, чтобы демодулировать модуляцию нагрузки.
В качестве еще одного примера отметим, что измерительный блок 311 может медленно сканировать сдвиг тактирования от нулевого до равного полному временному периоду опорного сигнала, а приемник 105 электроэнергии при этом будет модулировать нагрузку. В процессе сканирования адаптер 313 может определить, при каком сдвиге тактирования что глубина демодуляции оптимальна.
В качестве еще одного примера отметим, что измерительный блок 311 может выбрать начальный сдвиг тактирования и переместить опорный сигнал сдвига в одном направлении, пока приемник 105 электроэнергии модулирует нагрузку. При перемещении сдвига, адаптер 313 определяет, увеличивается глубина демодуляции, или уменьшается. При условии, что глубина демодуляции увеличивается, измерительный блок 311 продолжает перемещение в том же самом направлении. Когда глубина демодуляции уменьшается, измерительный блок 311 изменяет направление, в котором перемещается сдвиг. Это обеспечивает непрерывную адаптацию сдвига к максимальной глубине демодуляции в соответствии с изменяющимися условиями (подобными частоте, нагрузке и взаимодействию).
Таким образом, в частности, адаптер 313 может реализовать контур управления, выполненный с возможностью динамической адаптации оптимального сдвига тактирования измерений путем изменения первого временного сдвига в ответ на измеренную глубину демодуляции. А именно, адаптер 313 может вычислить глубину демодуляции путем динамического, а во многих вариантах осуществления - по существу, непрерывного, - сравнения измерений, соответствующих разным нагрузкам модуляции. Например, адаптер 313 может вычислить разность между первыми измерениями при двух разных нагрузках модуляции и использовать эту разность как меру глубины демодуляции (конечно, в разных вариантах осуществления можно использовать более сложные меры разности, например, такие, как отфильтрованные или взвешенные значения). Во многих вариантах осуществления, разность можно отфильтровать, делая это посредством фильтра нижних частот с подходящими характеристиками.
Затем адаптер 313 может обнаруживать изменения (отфильтрованной) меры глубины демодуляции. Если мера глубины демодуляции начинает уменьшаться, адаптер 313 может увеличить (или уменьшить) первый временной сдвиг и обнаружить, приводит ли это к увеличению глубины демодуляции. Если приводит, то он может перейти к увеличению (или уменьшению) первого временного сдвига до тех пор, пока не обнаружится максимальная глубина демодуляции, т.е., до тех пор, пока мера глубины демодуляции не начнет уменьшаться снова. Если начальное увеличение (или уменьшение) первого временного сдвига вместо этого приводит к дальнейшему уменьшению меры глубины демодуляции, адаптер 313 может перейти к измерению первого временного сдвига в другом направлении, т.е., он перейти к уменьшению (или увеличению) первого временного сдвига до тех пор, пока это не приведет к максимальное мере глубины демодуляции.
В некоторых вариантах осуществления, адаптер 313 может быть выполнен с возможностью непрерывных флуктуаций первого временного сдвига. Таким образом, первый временной сдвиг может непрерывно претерпевать небольшие изменения и может быть обнаружен, если они приводят к увеличенной глубине демодуляции. Если приводят, то нужно установить новое значение временного сдвига в качестве оптимального сдвига тактирования измерений. Если не приводят, то поддерживают оптимальный сдвиг тактирования измерений на уровне предыдущего значения. Флуктуации первого временного сдвига могут происходить в разных направлениях (т.е., иногда несколько увеличивая первый временной сдвиг, а иногда - несколько уменьшая его).
Соответственно, адаптер 313 может реализовать контур управления передатчиком электроэнергии по п.1 формулы изобретения, при этом адаптер 313 выполнен с возможностью определения глубины демодуляции в ответ на сравнение первых измерений при первой нагрузке модуляции и первых измерений при второй нагрузке модуляции. Таким образом, контур управления основан на измеренной глубине демодуляции, определяемой из первых измерений при разных нагрузках модуляции.
Адаптер 313 может проводить эти измерения и задействовать контур управления во время операции передачи электроэнергии, а именно - в течение фазы передачи электроэнергии. Соответственно, это обеспечивает непрерывную адаптацию к текущим условиям и характеристикам и позволяет системе обеспечить улучшенные рабочие характеристики связи, которые адаптируются к изменениям в сценариях эксплуатации. В частности, авторы изобретения поняли, что рабочие характеристики связи и характеристики тактирования зависят от динамических свойств, которые изменяются во время работы. В частности, авторы изобретения поняли, что оптимальные моменты времени и длительности измерения не являются неизменными, а зависят от динамически изменяющихся свойств, таких, как частота и нагрузка сигнала передачи электроэнергии, или взаимодействие между приемником электроэнергии и передатчиком электроэнергии.
Посредством динамической адаптации сдвига тактирования для измерений, используемой для проведения демодуляции во время работы, а в частности - в течение фазы передачи электроэнергии, достигают улучшенной связи. Реализуя контур автоматического управления, который адаптирует тактирование, можно обеспечить систему, которая универсально и динамически адаптирует тактирование измерений. Адаптацию можно проводить во время работы, а конкретно - во время передачи электроэнергии, а также во время демодуляции. Таким образом, адаптер 313 может адаптировать сдвиг тактирования одновременно с проводимой демодуляцией. Конкретно, те же измерения, которые используются для демодуляции, адаптер 313 может использовать для адаптации сдвига тактирования. Во многих вариантах осуществления, измерения (первые измерения), которые используются, чтобы демодулировать модуляцию нагрузки, используются также для генерирования меры глубины демодуляции, которую используют для возбуждения контура управления.
Следует понимать, что можно воспользоваться другими подходами для реализации контура управления, который возбуждает первый временной сдвиг, имея целью оптимальный сдвиг тактирования измерений на основе измеренной глубины демодуляции. Конкретно, адаптер 313 может реализовать любой алгоритм, который - в ответ на измеренную глубину демодуляции - обуславливает возбуждение первого временного сдвига, результатом чего должна стать максимальная глубина демодуляции. Таким образом, поскольку измеренная глубина демодуляции зависит от первого временного сдвига, это приведет к получению контура управления, который сможет обеспечить динамическое возбуждение сдвига тактирования для измерений, используемого для демодуляции. Контур управления также может автоматически оптимизировать сдвиг тактирования, а значит - и тактирование измерений, используемое для демодуляции в текущих условиях. В самом деле, во многих вариантах осуществления, этого можно достичь без контура управления, учитывающего какую-либо из конкретных характеристик, негативно влияющих на моменты оптимального тактирования. Например, контур не обязателен для обнаружения или оценки нагрузки передачи электроэнергии или взаимодействия между приемником электроэнергии и передатчиком электроэнергии, и при этом работа контура управления будет по-прежнему приводить к адаптации сдвига тактирования, чтобы отразить изменения таких параметров.
Таким образом, в отличие, например, от подходов, при которых для измерений используют фиксированное заранее определенное (например, определенное на стадии проектирования или изготовления) тактирование (или используют, например, простое обнаружение заранее определенного пика), система может обеспечить существенно улучшенные рабочие характеристики связи. В самом деле, как будет проиллюстрировано позже, использование заранее определенных значений может обеспечить приемлемые рабочие характеристики в некоторых сценариях, но в результате этого проявится тенденция к рабочим характеристикам связи ниже оптимальных в других сценариях. Например, передатчик электроэнергии можно использовать с рядом приемников электроэнергии с разными характеристиками, например, таких, как с разными нагрузками, разными положениями индукторов, и т.д. Описываемая система может автоматически адаптироваться к разным приемникам электроэнергии, обеспечивая рабочие характеристики, оптимизированные для конкретного приемника электроэнергии, используемого в данный момент. Использование заранее определенного сдвига тактирования (или, например, двух заранее определенных сдвигов тактирования) не может обеспечить такую оптимизацию, и поэтому демодуляция во многих сценариях неизбежно будет основана на уменьшенной глубине демодуляции. Аналогичным образом, использование простого обнаружения пиков приведет к уменьшенной глубине демодуляции, и в самом деле - в некоторых сценариях - может привести, по существу, к отсутствию глубины демодуляции, а значит - и к очень высокой частоте появления ошибок демодуляции (например, такой, как в примере согласно фиг.8).
Во многих вариантах осуществления, все первые измерения проводят при текущем значении оптимального сдвига тактирования измерений, а значение оптимального сдвига тактирования измерений динамически модифицируют, чтобы отразить изменения сдвига тактирования, приводящие к максимальной глубине демодуляции. Кроме того, во многих таких вариантах осуществления, все первые измерения, используемые адаптером для определения оптимального сдвига тактирования измерений, также можно использовать для демодуляции.
Вместе с тем, в других вариантах осуществления, при текущем значении оптимального сдвига тактирования измерений можно проводить лишь некоторые из первых измерений. Например, некоторые из первых измерений можно проводить с временным сдвигом, соответствующим текущему значению оптимального сдвига тактирования измерений. В частности, эти измерения можно использовать для демодуляции. В дополнение отметим, однако, что некоторые из первых измерений можно проводить с первым временном сдвигом (или временными сдвигами), не соблюдая при этом соответствие текущему значению оптимального сдвига тактирования измерений. Скорее, эти измерения можно проводить с отличающимся временным сдвигом, в дальнейшем именуемым тестовым временным сдвигом. Адаптер может определять глубину демодуляции при тестовом временном сдвиге, которая в дальнейшем именуется тестовой глубиной демодуляции.
Затем адаптер может генерировать меру разности, отражающую разность между тестовой глубиной демодуляции и глубиной демодуляции для оптимального сдвига тактирования измерений. Если оптимальный сдвиг тактирования измерений в самом деле соответствует максимальной глубине демодуляции, тестовая глубина демодуляции будет меньшей. Вместе с тем, если обнаруживают, что тестовая глубина демодуляции больше, чем глубина демодуляции для оптимального сдвига тактирования измерений, определяют, что тестовая глубина демодуляции теперь отражает максимальную глубину демодуляции, а адаптер соответственно изменяет значение оптимального сдвига тактирования измерений так, чтобы оно соответствовало тестовому сдвигу тактирования.
Таким образом, когда обнаруживают, что измеряется глубина демодуляции, которая больше, чем воспринимаемая в данный момент максимальная глубина демодуляции, система адаптируется, делая тестовый временной сдвиг для этой глубины демодуляции новым оптимальным сдвигом тактирования измерений. Таким образом, новую уставку оптимального сдвига тактирования измерений определяют на основе контура управления, который в качестве входного сигнала имеет глубину демодуляции для текущего оптимального сдвига тактирования измерений.
Следует понимать, что в некоторых вариантах осуществления изменение оптимального сдвига тактирования измерений может быть подчинено различным критериям и требованиям. Например, может потребоваться, чтобы разность глубин демодуляции оказалась большей, чем некоторое заданное значение, стала большей для заданного промежутка времени, и т.д. Следует также отметить, что разность между глубинами демодуляции можно подвергнуть фильтрации как части процесса оценки.
В некоторых вариантах осуществления, система может предусматривать использование фиксированного сдвига тактирования между оптимальным сдвигом тактирования измерений и тестовым сдвигом тактирования. В других вариантах осуществления может существовать динамически изменяющийся сдвиг. Например, в некоторых вариантах осуществления, адаптер может быть выполнен с возможностью изменения тестового сдвига тактирования например, для сканирования в некотором заданном диапазоне. Можно обнаружить наибольшее определенное значение глубины демодуляции, а потом сравнить его с глубиной демодуляции при текущем оптимальном сдвиге тактирования измерений.
Также следует понимать, что во многих вариантах осуществления можно использовать более одного тестового сдвига тактирования. Например, адаптер может непрерывно вычислять глубину демодуляции на основе измерений со сдвигом тактирования, который немного меньше оптимального сдвига тактирования измерений и немного больше оптимального сдвига тактирования измерений. Это может обеспечить симметричную адаптацию оптимального сдвига тактирования измерений и может, в частности, способствовать адаптации к непрерывному схождению к максимальной глубине демодуляции. В некоторых вариантах осуществления, измеренную разность глубин демодуляции можно использовать в качестве сигнала ошибки для контура управления, устанавливающего оптимальный сдвиг тактирования измерений. Например, если мера разности является положительной, соответствующей глубине демодуляции для текущего оптимального сдвига тактирования измерений, который большей, чем глубина демодуляции, сигнал ошибки устанавливают равным нулю. Вместе с тем, если эта разность является отрицательной, сигнал ошибки для контура устанавливают равным значению разности, приводящему к оптимальному сдвигу тактирования измерений, смещаемому к тестовому сдвигу тактирования.
В некоторых вариантах осуществления, сигнал ошибки можно генерировать, объединяя первую меру разности для первого тестового сдвига тактирования, который несколько короче оптимального сдвига тактирования измерений, и вторую меру разности для второго тестового сдвига тактирования, который несколько продолжительнее оптимального сдвига тактирования измерений. Меры разности сначала можно установить равными нулю для значений, указывающих, что глубина демодуляции при оптимальном сдвиге тактирования измерений больше. Затем получаемые меры разности можно вычесть друг из друга, а результат использовать в качестве сигнала ошибки для контура управления, определяющего оптимальный сдвиг тактирования измерений.
Эта подход может обеспечить существенно повышенную надежность связи и сниженную частоту появления ошибок.
Во многих вариантах осуществления, частоту сигнала передачи электроэнергии устанавливают так, чтобы она обеспечивала желаемую характеристику передачи электроэнергии. Соответственно, частота в типичном случае не оптимизирована для рабочих характеристик демодуляции.
В качестве конкретного примера отметим, что в спецификации стандарта Qi для малой мощности предусматривается демодуляция тока, протекающего через катушку передатчика электроэнергии, и/или напряжения на этой катушке (см., например, Qi ʺSystem description, wireless power transfer, volume I: low power, part 1: interface definitionʺ, Version 1.1.2, June 2013 (Стандарт Qi «Описание системы. Беспроводная передача электроэнергии», том I: «Малая мощность», часть 1: «Определение интерфейса», версия 1.1.2, июнь 2013). Передатчик электроэнергии демодулирует измеренный сигнал путем детектирования некоторой разности токов или напряжений между двумя состояниями нагрузки, которые именуются состояниями HI и LO (см. раздел 6 вышеупомянутого описания системы согласно стандарту Qi). В случае подхода, соответствующего стандарту Qi, ток, протекающий через катушку передатчика электроэнергии, измеряют как пиковую амплитуду или посредством фиксированного заранее определенного сдвига тактирования согласно четверти цикла (т.е. в фазе 90 градусов) относительно сигнала управления или переключаемого возбуждения, обеспечивающего возбуждение инвертора. Таким образом, разность между состояниями HI и LO соответствует разности (пиковых) амплитуд между двумя состояниями или разности амплитуды, измеряемой с конкретным, фиксированным и заранее определенным сдвигом. Можно также измерять напряжение, но - измерять тоже с фиксированным, заранее определенным временным сдвигом. А именно, амплитуда сигнала напряжения измеряется с нулевым временным сдвигом (соответствующим фазовому сдвигу 0°).
Вместе с тем, авторы изобретения поняли, что эти измерения в типичном случае не приводят к оптимальной или максимальной глубине демодуляции, которой можно достичь.
На фиг.6 изображены несколько кривых, иллюстрирующих параметры как функцию частоты сигнала передачи электроэнергии. Кривые 601 и 603 соответственно демонстрируют амплитуду напряжения на нагрузке для ситуаций, в которых конденсатор для модуляции нагрузки отсоединен и подсоединен, соответственно. Кривые 605 и 607 демонстрируют ток индуктора для передатчика соответственно при подсоединенном и отсоединенном конденсаторе, а кривые 609 и 611 демонстрируют фазу тока индуктора для тех же сценариев.
Как можно заметить, частота, на которой получается оптимальная глубина амплитудной демодуляции для тока индуктора, составляет 730 кГц, тогда как частота, на которой получается оптимальна глубина фазовой демодуляции, составляет 718 кГц. На других частотах, оптимальная глубина демодуляции (амплитудной или фазовой) не получается. Более того, как можно заметить, максимальная амплитуда сигнала на нагрузке не достигается ни на одной из этих частот. Скорее она получается на частоте приблизительно 722 кГц.
Таким образом, как продемонстрировано, желаемая или оптимальная частота для передачи электроэнергии отличается от оптимальной частоты для модуляции или демодуляции нагрузки. Поэтому когда устанавливают частоту для обеспечения желаемых свойств передачи электроэнергии, рабочие характеристики связи могут оказаться не оптимизированными.
Хотя диапазон частоты на фиг.6 выбран отличающимся от типичного для приложений, соответствующих стандарту Qi, этот же принцип применим и для диапазона частот согласно стандарту Qi. Фиг.6 представлена в качестве примера для пояснения работы.
Помимо этого, авторы изобретения также поняли, что оптимальное время для измерения, например, тока индуктора может существенно изменяться в зависимости, например, от частоты, нагрузки или взаимодействия.
На фиг.7 изображен ток, протекающий через катушку передатчика, имеющуюся в передатчике электроэнергии. Как показано, если рабочая частота установлена равной 735 кГц, максимальная глубина модуляции возникает на положительном и отрицательном пиках тока. С другой стороны, если рабочая частота установлена равной 760 кГц, максимальная глубина модуляции возникает при переходах тока через нуль, как показано на фиг.8. Если рабочая частота установлена равной 745 кГц, максимальная глубина модуляции не возникает на пиках или переходах тока через нуль.
Такой пример показан на фиг.9. В этом случае, данный подход согласно спецификации стандарта Qi должен приводить к существенно ухудшенным рабочим характеристикам связи. Вместе с тем, при описываемом подходе передатчик 101 электроэнергии можно настроить на фазу или сдвиг тактирования для измерений, в частности - для дискретизации тока индуктора, таким образом, что будет применяться фаза или сдвиг тактирования, приводящий к наибольшей глубине демодуляции. Для случая, описанного на фиг.9, адаптация сдвига тактирования будет такой, что дискретизация измерения будет соответствовать наибольшей разности (т.е., с относительным сдвигом тактирования примерно 0,5 мкс и 1,2 мкс).
В описываемом передатчике 101 электроэнергии согласно фиг.3, адаптер 313 выполнен с возможностью отслеживания оптимальной глубины демодуляции путем изменения момента времени, в который сигнал демодулируется (когда происходит дискретизация либо измерение тока или напряжения индуктора). Иными словами, измерения имеют сдвиг тактирования относительно опорного сигнала, такого, как сигнал управления, возбуждающий инвертор и установленный с возможностью обеспечения оптимальной глубины демодуляции. Например, согласно фиг.7, адаптер может установить сдвиг тактирования, который может составлять 0,3 мкс, согласно фиг.8 его можно установить равным 0,05 мкс, а согласно фиг.9 его можно установить равным 0,5 мкс (для опорного сигнала с таким же тактированием, как у тока индуктора). За счет адаптации времени дискретизации для первых измерений, можно улучшить рабочие характеристики демодуляции, в частности, можно уменьшить частоту появления ошибок.
Как упоминалось ранее, во многих вариантах осуществления передатчик 101 электроэнергии содержит адаптер передачи электроэнергии, выполненный с возможностью выбора частоты сигнала передачи электроэнергии на основе свойства передачи электроэнергии. В примере согласно фиг.1, контроллер 307 передатчика может реализовать функциональные средства такого адаптера передачи электроэнергии и может соответственно адаптировать и устанавливать частоту сигнала передачи электроэнергии на основе операции передачи электроэнергии.
Следует понимать, что в разных вариантах осуществления частоту можно устанавливать на основе разных свойств передачи электроэнергии. Во многих вариантах осуществления, упомянутым свойством может быть свойство, обуславливающее кпд передачи электроэнергии, свойство, обуславливающее уровень электроэнергии, и/или свойство, обуславливающее потребность в электроэнергии.
Например, резонансная частота резонансного контура 303 может изменяться из-за изменений в компонентах, старения, температуры, и т.д. Аналогичным образом, резонансная частота резонансного контура приемника 105 электроэнергии может изменяться между разными приемниками электроэнергии и в зависимости от времени, температуры, и т.д. В типичном случае, кпд передачи электроэнергии будет зависеть от взаимосвязи между резонансными частотами и частотой сигнала передачи электроэнергии. В некоторых вариантах осуществления, контроллер 307 передатчика может быть выполнен с возможностью адаптации частоты сигнала передачи электроэнергии для максимизации кпд передачи электроэнергии. Эту адаптацию можно проводить, например, один раз во время инициализации передачи электроэнергии, или можно проводить динамически и неоднократно во время передачи электроэнергии.
В качестве еще одного примера отметим, что во многих вариантах осуществления частоту сигнала передачи электроэнергии можно динамически изменять во время операции передачи электроэнергии, чтобы обеспечить желаемый уровень электроэнергии для сигнала передачи электроэнергии, так что приемник 105 электроэнергии получает подходящую электроэнергию. Этот подход основан на том, что передаваемая электроэнергия зависит от взаимосвязи между частотой сигнала передачи электроэнергии и резонансными частотами резонансных контуров передатчика 101 электроэнергии и приемника 105 электроэнергии. Вообще говоря, передаваемая электроэнергия склонна уменьшаться по мере увеличения разности между частотами сигнала передачи электроэнергии и резонансными частотами.
Во многих вариантах осуществления, приемник 105 электроэнергии выдает указание потребности в электроэнергии, а передатчик 101 электроэнергии реагирует на такую потребность коррекцией уровня электроэнергии сигнала передачи электроэнергии. В некоторых вариантах осуществления возможна выдача потребности в электроэнергии как абсолютного значения, такого, как желаемый уровень электроэнергии, но в большинстве вариантов происходит выдача этой потребности как относительного значения, указывающего например, следует ли увеличить или уменьшить текущий уровень электроэнергии.
Конкретно, приемник 105 электроэнергии в описываемой системе передает сообщения об управлении электроэнергией во время фазы передачи электроэнергии в соответствии со спецификацией стандарта Qi (т.е., они передаются посредством модуляции нагрузки и, по меньшей мере, один раз через каждые 250 мсек). В ответ на это, контроллер 307 передатчика увеличивает или уменьшает частоту сигнала передачи электроэнергии. Например, если текущая частота выше, чем резонансные частоты резонансных контуров, а приемник 105 электроэнергии запрашивает увеличение электроэнергии, контроллер 307 передатчика переходит к понижению частоты.
Изменение частоты сигнала передачи электроэнергии в ответ на операцию передачи электроэнергии обеспечивает весьма эффективное и высококачественное управление передачей электроэнергии. Вместе с тем, поскольку это требует установления частоты для обеспечения желаемых характеристик передачи электроэнергии, это обстоятельство противоречит предпочтениям по частоте сигнала передачи электроэнергии в целях связи, а именно - в целях модуляции и демодуляции нагрузки. Таким образом, оптимизация частоты для передачи электроэнергии в типичном случае приводит к ухудшению качества в целях связи. Соответственно, в системе согласно фиг.1 можно устанавливать частоту исходя из соображений передачи электроэнергии, но сдвиг (сдвиги) тактирования измерений (и, возможно, длительность (длительности) измерения) устанавливают исходя из соображений связи, а именно - соображений модуляции и/или демодуляции нагрузки.
В частности, сначала можно устанавливать частоту для передачи электроэнергии, и тогда систему выполняют с возможностью оптимизации рабочих характеристик измерения для заданной частоты. Такой подход может обеспечить весьма эффективную систему передачи электроэнергии, в которой операция передачи электроэнергии улучшена на основе улучшенной связи.
В предыдущем описании, измерения тока или напряжения индуктора рассматривались главным образом как представляющие собой дискретизацию, а значит - имеющие длительность дискретизации, которая в типичном случае настолько коротка, что измеренный сигнал можно считать постоянным в пределах окна дискретизации. Например, в типичном случае, время дискретизации, по меньшей мере, в 10 раз меньше, чем период времени при самой высокой частоте дискретизируемого сигнала. В типичном случае, длительность дискретизации составляет не более 10 мкс, а зачастую - не более 1 мкс.
Вместе с тем, в других вариантах осуществления, измерение тока или напряжения индуктора могут быть более длительным. Например, a измерение можно проводить на протяжении временного интервала измерения, который меньше, чем период времени опорного сигнала, но больше, чем 1, 2, 5, 10 или свыше 20 % периода времени. Расширенное время измерения может оказаться выгодным во многих сценариях или вариантах осуществления, поскольку может обеспечить некоторую фильтрацию или усреднение на нижних частотах, что приводит к улучшенному отношению сигнал-шум и соответственно - к пониженной частоте появления ошибок и улучшенной связи.
Использование интервалов времени измерения также может оказаться пригодным, в частности, для аналоговых вариантов осуществления, а также может облегчить реализацию.
В некоторых вариантах осуществления, адаптер 313 выполнен с возможностью не только определять оптимальный сдвиг тактирования или фазовый сдвиг, но и определять оптимальную длительность измерения как длительности интервалов времени измерения, которые приводят к наибольшей глубине демодуляции.
Таким образом, адаптер 313 может изменять длительность и определять глубину демодуляции для разных длительностей. Потом он сможет перейти к определению длительности, для которой измеряется наибольшая глубина демодуляции (или например, к интерполяции между соседними значениями пары длительностей с наибольшей глубиной демодуляции). Тогда упомянутая определенная длительность рассматривают как оптимальную длительность измерения, а потом ее можно использовать в целях генерирования измерений для демодуляции.
В качестве примера отметим, что измерительный блок 311 может выбрать начальную длительность и начать увеличивать эту длительность, а приемник 105 электроэнергии при этом модулирует нагрузку. Увеличивая длительность, адаптер 313 определяет, увеличивается или уменьшается глубина демодуляции. При условии, что глубина демодуляции увеличивается, измерительный блок 311 продолжает увеличивать длительность. Когда глубина демодуляции уменьшается, измерительный блок 311 инвертирует изменение длительности и начинает уменьшать длительность и повторяет этот процесс. Это обеспечивает непрерывную адаптацию длительности к максимуму глубины демодуляции в соответствии с изменяющимися условиями (подобными частоте, нагрузке и взаимодействию).
Следует понимать, что при определении максимальной глубины демодуляции для сдвига тактирования и/или длительности измерения адаптер не должен определять глобальный максимум, а может, определять, например, локальный максимум, например - соответствующий максимуму для поддержания одного параметра постоянным и изменения еще одного параметра.
В качестве примера отметим, что адаптер 313 может сначала установить длительность измерения равной наименьшему возможному значению (потенциально - включая дискретизацию тока или напряжения индуктора). Затем он может перейти к изменению временного сдвига, чтобы найти глубину демодуляции, соответствующую (локальному) максимуму, для этой минимальной длительности измерения. Оптимальный сдвиг тактирования можно установить равным значению, приводящему к максимальной глубине демодуляции. Впоследствии, адаптер может поддерживать сдвиг тактирования постоянным на уровне этого значения и изменять длительность окна измерений (в типичном случае - поддерживать среднюю точку на уровне постоянного сдвига тактирования). Можно идентифицировать максимальную глубину демодуляции для разных длительностей, например - как описывалось ранее для тактирования - путем осуществления сканирования окон длительностей для каждого из разных состояний нагрузки при модуляции нагрузки, а потом определить глубину демодуляции как разность. Тогда можно установить оптимальную длительность, равную соответствующей длительности, приводящей к максимальной глубине демодуляции. Таким образом и определяется глубина демодуляции, соответствующая (локальному) максимуму, а соответствующее тактирование и длительность измерений можно впоследствии использовать для того, чтобы демодулировать модуляцию нагрузки.
Как описано, демодуляция может быть основана на измерениях тока индуктора для катушки 103 передатчика. В других вариантах осуществления, демодуляция может быть основана на измерениях напряжения на катушке 103 передатчика, а на самом деле - во многих вариантах осуществления - демодуляция может быть основана на измерениях и тока индуктора, и напряжения индуктора для катушки 103 передатчика. Например, можно провести измерения и напряжения индуктора, и тока индуктора, а демодулятор может генерировать независимые мягкие решения, по которым и происходит передача символов данных (т.е., решение отражает не только наиболее вероятно принимаемые символы данных, но и вероятность того, что это значение является правильным). Затем два индивидуальных мягких решения для некоторого заданного символа данных можно объединить, а на основе символа объединенных мягких решений можно генерировать жесткое решение о бите принимаемых данных.
В некоторых вариантах осуществления, одни и те же сдвиг и длительность тактирования можно использовать для генерирования измерений тока и напряжения индуктора. Вместе с тем, в других вариантах осуществления возможно раздельное управление сдвигом и/или длительностью тактирования для измерений тока и напряжения индуктора, соответственно. Конкретно, в некоторых вариантах осуществления, измерительный блок 311 может генерировать измерения тока индуктора и напряжения индуктора с разными временными сдвигами относительно опорного сигнала, а демодулятор 309 может демодулировать модуляцию нагрузки на основе измерений, как тока индуктора, так и напряжения индуктора, например - посредством независимого генерирования мягких решений, которые затем объединяются в жесткое решение.
Конкретнее, измерительный блок 311 может быть выполнен с возможностью измерения тока индуктора с первым временным сдвигом относительно опорного сигнала, например, путем дискретизации тока индуктора в моменты времени, соответствующие первому временному сдвигу. При этом, измерительный блок 311 может содержать функциональные средства для измерения напряжения индуктора со вторым временным сдвигом относительно опорного сигнала, например, путем дискретизации напряжения индуктора в моменты времени, соответствующие второму временному сдвигу.
Измерительный блок 311 может быть выполнен с возможностью приема первого и второго сдвигов тактирования из адаптера 313.
Адаптер 313 может быть выполнен с возможностью определения первого сдвига тактирования как первого оптимального сдвига тактирования, который приводит к максимальной глубина демодуляции для тока индуктора. В частности, это можно сделать, как описано ранее, путем изменения первого сдвига тактирования с одновременным оперативным контролем глубины демодуляции только для тока индуктора.
В дополнение к этому, адаптер 313 может быть выполнен с возможностью определения второго оптимального сдвига тактирования путем изменения второго сдвига тактирования с целью обнаружения такого второго сдвига тактирования, который приведет к в максимальной глубине демодуляции для напряжения индуктора. Потом второй сдвиг тактирования можно установить равным этому оптимальному сдвигу тактирования.
Таким образом, в рассматриваемом примере, адаптер 313 может независимо изменять первый сдвиг тактирования и второй сдвиг тактирования и независимо определять первую глубину демодуляции и вторую глубину демодуляции, соответственно. Конкретно, первую глубину демодуляции можно определять как глубину демодуляции, отражающую разность измерений между первыми измерениями при разных нагрузках модуляции сигнала передачи электроэнергии, т.е., между измерениями тока индуктора при разных нагрузках модуляции. Конкретно, вторую глубину демодуляции можно определять как глубину демодуляции, отражающую разность измерений между вторыми измерениями при разных нагрузках модуляции сигнала передачи электроэнергии, т.е., между измерениями напряжения индуктора при разных нагрузках модуляции.
Таким образом, оптимальные сдвиги тактирования определяются независимо для измерений тока индуктора и измерений напряжения индуктора, так что максимальная глубина демодуляции достигается как для тока, так и для напряжения. Потом эти временные сдвиги по отдельности используются, соответственно, для измерений тока и напряжения во время операции демодуляции, т.е. демодуляцию проводят на основе измерений тока индуктора, генерируемых с первым оптимальным сдвигом тактирования, и измерений напряжения индуктора, генерируемых со вторым оптимальным сдвигом тактирования. Это может обеспечить весьма эффективную связь, а именно, может привести к оптимизации определения отдельных мягких решений при модуляции нагрузки, соответственно, измерений тока и напряжения. Этот подход может привести, в частности, к улучшенным рабочим характеристикам связи, а в типичном случае - к сниженной частоте появления ошибок и тем самым к улучшенной операции передачи электроэнергии.
В этом примере измерения тока и напряжения индуктора, операции адаптации и демодуляции можно осуществлять, соответственно, отдельно и независимо от измерений тока и напряжения, чтобы генерировать независимые мягкие решения. Таким образом, обработка может быть раздельной и независимой для большинства операций, и лишь тогда, когда мягкие решения генерированы, их рассматривают совместно путем объединения мягких решений.
Вместе с тем, следует понимать, что в некоторых вариантах осуществления, возможна «более комплексная» работа. Например, глубину демодуляции можно определять как объединенную меру, отражающую измерения и тока, и напряжения индуктора. Тогда можно определить объединение первого и второго сдвигов тактирования, которое максимизирует эту глубину демодуляции.
Например, в ситуациях, где устанавливают ряд разных комбинаций первого и второго сдвигов тактирования, применим «лобовой» метод решения (с перебором возможных вариантов), в результате чего и измеряют глубину демодуляции. Тогда первый и второй сдвиги тактирования можно выбрать как сдвиги тактирования для комбинации, приводящей к наибольшей глубине демодуляции. В качестве еще одного примера, отметим, что второй сдвиг тактирования сначала можно установить равным некоторому номинальному значению, а первый сдвиг тактирования варьировать, чтобы найти максимальную глубину демодуляции. Потом можно первый сдвиг тактирования установить равным сдвигу, приводящему к максимальной глубине демодуляции, а потом варьировать второй сдвиг тактирования, чтобы найти максимальную глубину демодуляции. После этого можно воспользоваться получаемым объединенным значением или провести дополнительные итерации. Хотя такой подход способствует нахождению локального, но - возможно - не глобального, максимума для глубины демодуляции, это в типичном случае будет приемлемо. Описываемые подходы также можно объединять, например, проводя сначала сравнение в пределах относительно небольшого количества первого и второго сдвигов тактирования, с последующей дополнительной последовательной оптимизацией, начиная со значений комбинации, приводящей к наибольшей глубине демодуляции.
В некоторых вариантах осуществления, передатчик 101 электроэнергии также может - в качестве дополнения или альтернативы - быть выполнен с возможностью раздельной адаптации измерений длительности при измерениях тока и напряжения индуктора. В частности, те подходы, которые описаны выше, применимы также к длительности измерений. Например, интервалы измерения можно установить равными номинальным значениям, а вышеописанный подход (вышеописанные подходы) можно использовать для определения первого и второго сдвигов тактирования. Затем адаптер 313 может перейти к соответствующим операциям для определения оптимальных интервалов измерения для данных выбранных сдвигов тактирования.
В некоторых вариантах осуществления, адаптацию сдвига тактирования и/или длительность измерения можно проводить в конкретные моменты времени в процессе работы, конкретно - в такие, как в течение инициализации передачи электроэнергии (например, как часть фазы конфигурации или при инициализации фазы передачи электроэнергии). В таком примере, оптимальное тактирование для измерений может быть определено в начале передачи электроэнергии, и такое определенное тактирование можно с этого момента поддерживать.
В других вариантах осуществления, оптимальные сдвиги тактирования можно определять, например, через регулярные интервалы времени в течение фазы передачи электроэнергии, например, такие, как один раз через каждые 2, 3 или 5 минут. Поэтому в таком примере описываемый подход к определению оптимального сдвига тактирования можно инициализировать через регулярные интервалы.
В других вариантах осуществления, передатчик 101 электроэнергии может быть выполнен с возможностью инициализации адаптации сдвига тактирования (и/или длительности) измерения в ответ на обнаружение некоторого события, в частности - в ответ обнаружение изменения рабочей характеристики передачи электроэнергии.
Например, как будет подробнее описано позже, авторы изобретения поняли, что наилучшее тактирование измерений тока или напряжения индуктора для демодуляции модуляции нагрузки зависит от частоты сигнала передачи электроэнергии, от нагрузки сигнала передачи электроэнергии и от взаимодействия между передатчиком электроэнергии и приемником электроэнергии (а конкретно - взаимодействия между катушкой или индуктором 103 передатчика и катушкой или индуктором 107 приемника).
В некоторых вариантах осуществления, контроллер 307 передатчика (или - в эквивалентном случае - это может быть адаптер 313) выполнен с возможностью инициализации адаптации сдвига тактирования и/или длительности измерения в ответ на определение того, что частота сигнала передачи электроэнергии изменяется, т.е., определение оптимального сдвига тактирования измерений возможно в ответ на изменение частоты сигнала передачи электроэнергии.
Например, контроллер 307 передатчика может непрерывно изменять частоту сигнала передачи электроэнергии в ответ на сообщения об управлении электроэнергией, получаемые от приемника 105 электроэнергии. Всякий раз, когда частота изменяется, новую частоту можно сравнивать с частотой при которой была проведена последняя адаптация сдвига тактирования. Если новая частота отличается от хранимой частоты последней адаптации, например, более, чем на некоторое (заранее определенной) пороговое значение, контроллер 307 передатчика может перейти к выдаче в адаптер 313 команды начать новый процесс адаптации, чтобы определить новый оптимальный сдвиг тактирования. Тогда текущую частоту можно сохранить как опорную для будущих сравнений.
Авторы изобретения поняли, что оптимальные тактирования для измерения тока или напряжение индуктора также зависят от нагрузки сигнала передачи электроэнергии. В некоторых вариантах осуществления, нагрузку сигнала передачи электроэнергии можно измерять непрерывно, а адаптер 313 может быть выполнен с возможностью инициирования адаптации в ответ на обнаружение изменения нагрузки.
Например, контроллер 307 передатчика может непрерывно измерять потребление электроэнергии, т.е., электроэнергию, подводимую к катушке 103 передатчика или его резонансному контуру схемой 301 возбуждения. Потребление электроэнергии (нагрузку) при последней адаптации можно запоминать и непрерывно сравнивать с ним текущее потребление электроэнергии. Если разность превышает, например, некоторое (заранее определенное) значение, адаптер 313 может перейти к началу нового процесса адаптации измерения, чтобы определить новый оптимальный сдвиг тактирования. Потом упомянутое потребление электроэнергии можно сохранить как опорное для будущих сравнений.
Авторы изобретения поняли, что оптимальное тактирование для измерения тока или напряжения индуктора также зависит от взаимодействия между передатчиком электроэнергии и приемником электроэнергии (а конкретно - между катушкой 103 передатчика и катушкой 107 приемника). В некоторых вариантах осуществления, возможен непрерывный оперативный контроль взаимодействия между передатчиком 101 электроэнергии и приемником 105 электроэнергии. Его можно осуществить, например, соотнося необходимый ток индуктора с принимаемой электроэнергией при некоторой заданной нагрузке. Если взаимодействие уменьшается, тока индуктора следует увеличить, чтобы достичь такой же получаемой электроэнергии.
Тогда адаптер 313 можно выполнить с возможностью инициирования адаптации сдвига тактирования (и/или длительности измерения) в ответ на обнаружение изменения во взаимодействии.
Например, контроллер 307 передатчика может непрерывно измерять взаимодействие как соотношение между номинальной и получаемой, судя по данным, электроэнергией индуктора при некоторой заданной нагрузке. Взаимодействие при последней адаптации можно сохранять и сравнивать с ним и текущее взаимодействие. Если разность превышает, например, некоторое (заранее определенное) пороговое значение, адаптер 313 может перейти к началу процесса новой адаптации для определения нового оптимального сдвига тактирования. Потом информацию о текущем взаимодействии можно сохранить в качестве опорной для будущих сравнений.
Вместо обнаружения изменения частоты, нагрузки или взаимодействия, демодулятор 309 передатчика может оперативно контролировать глубину модуляции. Когда он обнаруживает изменение - особенно ухудшение глубины модуляции, которое может быть результатом какого-либо изменения какого-либо параметра (частоты, нагрузки или взаимодействия), который влияет на модуляцию, адаптер 313 может перейти к началу нового процесса адаптации.
Вместо срабатывания по изменению некоторого параметра (частоты, нагрузки или взаимодействия), или по изменению глубины модуляции, адаптер 313 может непрерывно осуществлять поиск максимальной глубины модуляции, например, непрерывно изменяя малыми шагами сдвиг и/или длительность и тем самым используя обратную связь от демодулятора 309, зависящую от того, увеличивается или уменьшается глубина модуляции благодаря такому шагу.
Следует понимать, что можно использовать любой подходящий подход к демодуляции на основе измерений тока и/или напряжения индуктора. В самом деле, специалист поймет, что доступны многие методы демодуляции, включая методы апостериорного или априорного максимального правдоподобия. Также следует понимать, что можно использовать любой приемлемый подход, например, для синхронизации символов данных, и т.д.
В типичном случае, измерения можно обрабатывать (в типичном случае - фильтровать или усреднять, например, с помощью согласованного фильтра, который согласован с формой символов данных), а получаемые выходные сигналы можно дискретизировать в оптимальные для дискретизации моменты, что должно быть хорошо известно специалисту в области методов демодуляции (см. например, John Proakis, ʺDigital Communicationsʺ («Цифровая связь»), McGraw Hill, 2008, ISBN 0071263780). Получаемые дискретные значения можно сравнивать с ожидаемыми значениями для разных значений символов данных и выбирать ближайшее (на основе подходящей меры расстояния). Таким образом, можно использовать подход, предусматривающий демодуляцию, при которой принимаемый сигнал (измерения) используется (используются) для сравнения с ожидаемым сигналом (измерениями) при разных возможных символах данных, и выбираются демодулированные данные, которые определяются как возможный символ данных, имеющий наименьшее (в типичном случае - по Хэммингу) расстояние до ожидаемого сигнала (измерений). Следует понимать, что определение упомянутого расстояния или сравнение с ним может включать в себя обработку измерений, например, такую, как, фильтрация и усреднение. Таким образом, в типичном случае для демодуляции можно использовать подход, основанный на максимальном правдоподобии, при котором выбирается ближайшая точка группировки.
В качестве малосложного подхода к двоичным символам данных (т.е., передается «0» или «1»), демодулятор 311 может определять пороговое значение как долгосрочное среднее значение измерений. Усреднение пройдет по многочисленным значениям данных и в типичном случае будет соответствовать значению измерения, среднему между значениями, получаемым соответственно из «0» или «1». Когда демодулируется один бит, демодулятор 311 может усреднять измерения по соответствующему периоду времени символа данных (бита). Если получаемое значение больше долгосрочного порогового значения, бит данных демодулируется как «0», если оно меньше долгосрочного порогового значения, бит данных демодулируется как «1» (в предположении такой модуляции нагрузки, что значения измерений при «0» получаются больше, чем при «1»).
Следует понимать, что специалисту известны многие возможные методы демодуляции и что в рамках существа и объема притязаний изобретения можно использовать любой метод.
В нижеследующем тексте, аспекты, признаки, соображения, и т.д., в соответствии с подходом, реализуемым системой согласно фиг.1, будут описаны подробнее со ссылками, в частности, на компоновку согласно фиг.10 и 11. В рассматриваемом примере, передатчик 101 электроэнергии представлен блоком 1001 передачи электроэнергии, которой включает в себя контроллер 307 передатчика и схему 301 возбуждения согласно фиг.3, и блоком 1005 демодуляции, который включает в себя демодулятор 311, измерительный блок 309 и адаптер 313 согласно фиг.3.
В качестве конкретного примера отметим, что сценарий согласно фиг.10 может представлять канал связи между передатчиком электроэнергии и кухонным электроприбором. Консорциум беспроводной электромагнитной энергии учредил Рабочую группу для разработки спецификаций бесшнуровых кухонных электроприборов. Эти спецификации предназначены для того, чтобы охарактеризовать интерфейс между кухонными электроприборами и индукционными источниками электроэнергии. Потребности в электроэнергии могут изменяться от диапазона 100 Вт (т.е., соответствующего простым соковыжималкам) до 1,5-2,4 кВт для нагревательных электроприборов, таких, как электрические чайники.
Аналогично спецификациям стандарта Qi для маломощных средств, бесшнуровые кухонные электроприборы должны быть выполнены с возможностью осуществления связи с передатчиком электроэнергии, на котором они размещены. Вместе с тем, как только канал связи создан, физические свойства канала (взаимодействие катушек, резонансная частота системы, и т.д.) могут изменяться. Примеры возможных изменений включают в себя следующие.
Во время готовки, пользователь может (преднамеренно или непреднамеренно) передвинуть электроприбор, например, на несколько сантиметров. Хотя канал электроэнергии может поддерживать такое изменение, взаимодействие между катушками связи, возможно, изменится, вследствие чего глубина демодуляции уменьшается до неприемлемого уровня.
Электрические компоненты, такие, как конденсаторы и катушки, могут изменять свои электрические свойства (т.е., значения сопротивления, индуктивности и емкости) из-за технологических отклонений и допусков. Более того, эти свойства могут изменяться во времени из-за старения или внешних параметров, таких, как температура. Таким образом, резонансная частота схем связи передатчика электроэнергии может изменяться во времени. Это измерение может оказывать негативное влияние на глубину демодуляции и мешать правильной демодуляции данных, передаваемых из электроприбора.
При этом подходе, согласно фиг.10, ток, протекающий через катушку 103 (связи) передатчика (Lвязи_перед), измеряется посредством индуктора Lp для измерения тока, который находится в тесной связи с индуктором Ls, которой имеет резистор R1, подключенный к нему параллельно. Таким образом, ток, протекающий через индуктор Lp для измерения тока, индуцирует в индукторе Ls ток, который преобразуется в напряжение Vвх_дем, пропорциональное току, протекающему через катушку 103 передатчика. Напряжение Vвх_дем - это, соответственно, отображение измерения тока индуктора катушки 103 передатчика. Эта измерение затем обрабатывается в блоке 1005 демодуляции для генерирования демодулированных выходных данных.
В примере согласно фиг.10, модуляция нагрузки вносится приемником 105 электроэнергии посредством подсоединения и отсоединения конденсатора модуляции, Cмод, параллельно резонансному контуру приемника, образованному катушкой 107 приемника (Lсвзи_прием), и конденсатора резонансного контура, Cсвязи_прием. Конденсатор модуляции, Cмод, переключается переключателем модуляции, которым управляют схемы управления приемника 105 электроэнергии. Для блока 1003 приема электроэнергии также предусмотрен резонансный контур приемника, который организует работу приемника 105 электроэнергии, включая отбор электроэнергии и снабжение ею нагрузки - Rнагрузки и Cнагрузки.
Ниже будет подробнее рассмотрен возможный блок 1005 демодуляции, как показано на фиг.11. Входное напряжение Vвх_дем отображает ток, протекающий через катушку 103 передатчика. Эта напряжение усиливается и фильтруется в первом блоке 1101 усиления, чтобы получить два напряжения, Va и Vb. Эти два напряжения, Va и Vb, прикладываются к переключателям S1 и S2, соответственно. Напряжение Vb эквивалентно величине, обратной Va. Управление обоими переключателями S1 и S2 осуществляется посредством опорных сигналов Vопорн_a и Vопорн_b соответственно. Разность фаз между опорным сигналом Vопорн_a и опорным сигналом, синхронизированным с сигналом передачи электроэнергии (таким, как сигнал переключения для инвертор) настроена в диапазоне 0-360 градусов. Второй опорный сигнал Vопорн_b имеет разность фаз 180 градусов с Vопорн_a. Таким образом, переключателями S1 и S2 проводят попеременно. Период времени, в течение которого переключатели S1 и S2 замкнуты, тоже является настраиваемым - между очень коротким периодом времени, соответствующим единственной выборке, и полупериодом сигнала передачи электроэнергии. Переключатели S1 и S2 в любой момент времени не проводят одновременно. Период времени, в течение которого переключатель разомкнут, соответствует длительности или интервалу времени измерения и именуется также «окном измерения». Таким образом, выходы переключателей, т.е. выходное напряжение Vab, соответствует измерениям тока индуктора.
Затем выходное напряжение Vab каскада переключения усиливается и подвергается фильтрации нижних частот во втором блоке 1103 усиления, чтобы подавить высокочастотный сигнал несущей. Получается напряжение глубины модуляции, Vглуб_мод. Этот сигнал затем выдается в компаратор 1105 выходного каскада. Второй вход компаратора (т.е. Vdc) представляет собой скользящее среднее значение напряжения Vглуб_мод, определяемого фильтром нижних частот с большим временем усреднения. Разность амплитуд между этими двумя сигналами можно рассматривать как отображение глубины демодуляции (т.е. разность между текущим значением для заданного символа данных и долгосрочным средним значением по всем возможным символам данных (в типичном случае - по двоичным возможным значениям, соответствующим «0» и «1»).
Рабочие характеристики системы согласно фиг.10 и 11 можно рассмотреть для конкретного примера бесшнурового кухонного электроприбора, размещенного сверху передатчика электроэнергии. Считается, что обе катушки - передачи и приема (связи) -имеют значение индуктивности 2,3 мкГн. Это значение индуктивности в типичном случае может соответствовать, например, реальным катушкам диаметром 15 см с двумя обмотками. Эти две катушки образуют индукционный трансформатор, имеющий низкий коэффициент связи, составляющий 0,04. Малые значения коэффициента с диапазоном от 0,02 до 0,1 были измерены экспериментально. Частота сигнала передачи электроэнергии (т.е. сигнала несущей для модуляции нагрузки) установлена равной 745 кГц.
Примеры соответствующих сигналов иллюстрируются на фиг.12. «Окна измерения» переключателей S1 и S2 изображены относительно опорного сигнала V(опорн_фаза0), который соответствует сигналу переключения для инвертора, генерирующего сигнала передачи электроэнергии.
На фиг.12 иллюстрируются следующие сигналы (снизу вверх): входное напряжение V(вх_дем) схемы демодуляции; входные напряжения V(a) и V(b) (также именуемые Va и Vb), прикладываемые к переключателям S1 и S2; опорные сигналы V(опорн_a) и V(опорн_b) переключателей и измерений, которые управляют обоими переключателями и таким образом - измерениями; и опорный сигнал V(опорн_фаза0), отображающий разность фаз, составляющую 0 градусов, с сигналом, возбуждающим инвертор (т.е., опорный сигнал, синхронизированный с сигналом передачи электроэнергии). Например, разность фаз или сдвиг тактирования между V(опорн_a) и опорным сигналом V(опорн_фаза0) в этом примере равна или равен нулю, а разность фаз или сдвиг тактирования между V(опорн_b) и опорным сигналом V(опорн_фаза0) в этом примере равна или равен 180° (т.е., сдвиг тактирования установлен равным нулю и некоторому периоду времени соответственно), когда измерение происходит с начала интервала измерения. Длительность измерения установлена равной полупериоду сигнала передачи электроэнергии.
Как упоминалось ранее, сдвиги тактирования или разности фаз между сигналами управления измерениями и опорным сигналом могут быть установлены равными разным значениям. На фиг.13 показан пример, в которому фазовый сдвиг увеличен на 90° (сдвиг тактирования составляет четверть периода времени) по отношению к примеру согласно фиг.12. В примере согласно фиг.13, длительность измерения установлена равной полупериоду сигнала передачи электроэнергии, как на фиг.12. На фиг.14 показан пример, в котором длительность измерения уменьшена до четверти периода времени.
Изменения сдвига тактирования или фазового сдвига и/или длительности измерения будут влиять на глубину демодуляции. Это проиллюстрировано на фиг.15, где фаза сигналов измерения, V(a) и V(b), линейно увеличивается от 0 градусов в момент 0 мс до 360 градусов в момент 40 мс (и поэтому может соответствовать сканированию в течение адаптации). Как показано, максимальная глубина модуляции изменяется, по существу, как функция сдвига тактирования или фазового сдвига. В частности, это не происходит, когда фазовый сдвиг находится на уровне 0 градусов или 90 градусов, но в конкретном примере происходит, когда фаза находится приблизительно в диапазоне 36-54 градуса (соответствующем сдвигу тактирования между 4 мс и 6 мс) и в диапазоне 216-234 градуса (сдвиг тактирования находится между 24 мс и 26 мс согласно фиг.12). Таким образом, если используют фиксированный заранее определенный сдвиг тактирования, результатом будет очень малая глубина демодуляции по сравнению с описываемым подходом, предусматривающим адаптацию сдвига тактирования к текущим условиям.
В нижеследующих абзацах приводится более подробное пояснение результатов, показанных на фиг.15.
Пример модулированных данных и входного напряжения схемы демодуляции изображен на фиг.16. В этом примере, передаваемые данные представляют собой тактовый сигнал на частоте 50 кГц, т.е., данные чередуются между «0» и «1». На фиг.17 дополнительно изображен сигнал V(опорн_a) переключения измерения, управляющий переключателем S1, и соответствующий, сдвинутый на 180° градусов сигнал V(опорн_b) переключения измерения, управляющий переключателем S2. Фазовый сдвиг сигнала V(опорн_a) переключения измерения в рассматриваемом примере установлен равным 45° относительно опорного сигнала V(фаза0_опорн). I(S1) и I(S2) -это токи, протекающие через S1 и S2, соответственно.
Как показано, входное напряжение Vb переключателя S2 является величиной, обратной входному напряжению Va переключателя S1. Окно измерения установлено равным полупериоду сигнала несущей. Таким образом, каждый переключатель проводит попеременно. Выходное напряжение Vab обоих переключателей в дальнейшем обрабатывается (усиливается и подвергается фильтрации нижних частот), чтобы получить входное напряжение Vглуб_мод компаратора 1105 выходного каскада.
На фиг.18 дополнительно изображен сигнал V(ab) на выходе каскада переключения (т.е., переключателей S1 и S2), входные сигналы V(глуб_мод) и V(vneg_amp) компаратора 1105 выходного каскада, выходной сигнал V(изм.дем) демодулятора (т.е. выходного компаратора 1105) и исходные модулированные данные V(данные).
На фиг.19 и 20 показаны те же сигналы, что и на фиг.17 и 18, но для примера, в котором фазовый сдвиг измерения установлен равным 144°. Как показано на фиг.15, это соответствует случаю, в котором глубина модуляции минимальна (т.е., составляет примерно 16 мс). Как можно увидеть на фиг.20, качество демодулированного сигнала не является оптимальным, поскольку глубина модуляции гораздо меньше, чем на фиг.18.
Как упоминалось ранее, глубина демодуляции и оптимальные сдвиги тактирования или длительности измерения могут зависеть от взаимодействия между приемником электроэнергии и передатчиком электроэнергии. Это можно дополнительно проиллюстрировать, рассматривая конкретный пример системы согласно фиг.10 и 11.
В этом примере, катушка 103 передатчика и катушка 107 приемника имеют коэффициент связи, равный 0,04, а частота сигнала передачи электроэнергии установлена равной 745 кГц. Как показано на фиг.21, если фазовый сдвиг между опорным сигналом и сигналом переключения измерения сигнал равен 0 градусов, а окно измерения установлено равным полупериоду сигнала несущей, передатчик электроэнергии в рассматриваемом примере будет правильно демодулировать принимаемые данные.
Если пользователь немного перемещает электроприбор во время готовки, взаимодействие между двумя катушками может ослабнуть, например, до 0,02. В этом случае возникает ситуация согласно фиг.22 и, как можно увидеть, фазовый сдвиг 0 градусов приведет к данным, демодулируемым неправильно. Вместе с тем, если передатчик электроэнергии адаптирует фазу измерения или сдвиг тактирования (например, изменяя ее на 45 градусов), данные опять демодулируются правильно, как показано на фигГ.23. Следует отметить, что проведена адаптация только тактирования или фазового сдвига, а частота сигнала передачи электроэнергии осталась неизменной.
На фиг.24 изображен пример аналогового реализации схемы согласно фиг.11. На фиг.25 изображен пример системы согласно фиг.10, в которой измерение тока индуктора дискретизируется аналого-цифровым преобразователем. В этом случае возможна цифровая реализация блока 1005 демодуляции, например, в виде аппаратно-программного обеспечения в микроконтроллере или процессоре для цифровой обработки сигналов. В этом случае, микроконтроллер или процессор для цифровой обработки сигналов может адаптировать тактирование или фазовый сдвиг измерения, управляя непосредственно тактированием дискретизации с помощью аналого-цифрового преобразователя. В рассматриваемом примере, окно измерения может быть фиксированным (соответствующим короткому интервалу дискретизации).
В примерах, приведенных выше, основное внимание уделялось приложению, характеризующемуся большой мощностью и беспроводным питанием кухонного электроприбора. Вместе с тем, описываемый подход с тем же успехом применим к другим приложениям, включая маломощные приложения, например, такие, как приложения, соответствующие спецификации стандарта Qi (версия 1.1) для малой мощности.
В нижеследующих примерах снова рассматривается система согласно фиг. 10 и 11, но - с другими параметрами конструкции. В этом примере, катушка 103 передатчика имеет значение индуктивности 24 мкГн, а катушке 107 приемника имеет индуктивность 15,3 мкГн. Обе катушки имеют эквивалентное последовательное сопротивление 200 мОм. Емкости резонансных конденсаторов Cсвязи_перед и Cсвязи_прием установлены равными 100 нФ и 137 нФ, соответственно. Емкость конденсатора модуляции, Cмод, установлена равной 22 нФ. И, наконец, коэффициент связи принят равным 0,4. Это значение, которого можно ожидать в типичном случае, когда приемник размещен поверх передатчика. Это значение коэффициента связи гораздо больше, чем коэффициент связи в типичном случае, учитываемый в ранее рассмотренном приложении, характеризующемся большой мощностью, поскольку разделяющее расстояние между приемником и передатчиком в типичном случае гораздо меньше (например, составляет несколько миллиметров).
Во время фазы передачи электроэнергии (т.е., когда передатчик обеспечивает электроэнергию для приемника), приемник электроэнергии выдает информацию, которая может позволить передатчику электроэнергии управлять электроэнергией, передаваемой приемнику. В типичном случае, передатчик электроэнергии управляет передаваемой электроэнергией за счет настройки его рабочей частоты (т.е., частоты сигнала передачи электроэнергии). На фиг.26 изображен пример тока,, протекающего через катушку 103 передатчика (в течение одного тактового цикла), когда рабочая частота установлена равной 135 кГц. Показаны сценарии, в которых конденсатор модуляции подсоединяется и отсоединятся. Как изображено, максимальная глубина демодуляции возникает на каждом фазовом переходе опорного сигнала Vопорн, который тоже показан. Иными словами, максимальная глубина модуляции возникает в фазе 0 или 180 градусов опорного сигнала.
Если в течение фазы передачи электроэнергии приемник запрашивает меньшую электроэнергию, передатчик электроэнергии в типичном случае увеличивает рабочую частоту. На фиг.27 показан ток, протекающий через катушку 103 передатчика, если рабочая частота увеличивается до 145 кГц. Как показано, максимальная глубина модуляции теперь возникает приблизительно через 2,55 мкс после каждого фазового перехода опорного сигнала. Иными словами, максимальная глубина модуляции возникает при фазовом сдвиге относительно опорного сигнала, составляющем приблизительно 133 или 313 градусов. Она не возникает в те же моменты времени, что и на фиг.26.
Таким образом, как недвусмысленно проиллюстрировано, максимальная глубина демодуляции или модуляции зависит от частоты сигнала передачи электроэнергии. В некоторых вариантах осуществления возможно обнаружение изменения частоты, и это обнаружение может инициировать адаптацию тактирования измерений или фазового сдвига, чтобы подтвердить, что сигнал демодулируется при оптимальной глубине модуляции.
В предыдущем примере рассматривался коэффициент связи 0,4. Эта связь может изменяться. Например, если пользователь (преднамеренно или непреднамеренно) изменяет положение приемника сверху передатчика, коэффициент связи может увеличиваться или уменьшаться. На фиг.28 изображен ток, протекающий через катушку 103 передатчика, если коэффициент связи увеличивается до 0,6 (рабочая частота установлена равной 145 кГц, как на фиг.27).
Как показано, максимальная глубина демодуляции теперь возникает приблизительно через 0,55 мкс после каждого фазового перехода опорного сигнала. Иными словами, максимальная глубина модуляции возникает при фазовом сдвиге относительно опорного сигнала, составляющего приблизительно 26 или 206 градусов. Она не возникает в те же моменты времени, что и на фиг.27.
Таким образом, как недвусмысленно проиллюстрировано, максимальная глубина демодуляции или модуляции зависит от взаимодействия между передатчиком электроэнергии и приемника электроэнергии. В некоторых вариантах осуществления возможно обнаружение изменения частоты, и это обнаружение может инициировать адаптацию тактирования измерений или фазового сдвига, чтобы подтвердить, что сигнал демодулируется при оптимальной глубине модуляции.
Следует отметить, что, когда коэффициент связи изменяется, значения индуктивности катушек первичной и вторичной обмоток тоже изменяются. Это происходит, например, благодаря тому, что более или менее целесообразный металл в приемнике оказывает влияние на магнитный поток, генерируемый катушкой первичной обмотки. Таким образом, аналогично рабочей частоте или коэффициенту связи, эти изменения индуктивностей тоже оказывают влияние на моменты времени (или фазы), в которые возникает максимальная глубина модуляции.
Как упоминалось ранее, оптимальное тактирование измерения также может зависеть от нагрузки сигнала передачи электроэнергии. На фиг.29-32 изображены сигналы, соответствующие фиг.21-23 но - с другими параметрами конструкции, соответствующими примеру реализации малой мощности согласно стандарту Qi.
На фиг.29 изображен пример нагрузки, в котором эквивалентное входное полное сопротивление нагрузки равно 2 кОм, а рабочая частота установлена равной 125 кГц. В типичном случае, такая нагрузка может соответствовать внутреннему микроконтроллеру или микропроцессору приемника. Нагрузкой 2 кОм во время работы соответствует эквивалентному входному полному сопротивлению микроконтроллера.
В примере согласно фиг.29, сдвиг фазы или тактирования по отношению к опорному сигналу установлен равным нулю, а длительность измерения установлена равной половине периода времени. Как можно увидеть, данные демодулируются правильно.
При этом - например, во время зарядки - полное сопротивление нагрузки приемника электроэнергии не обязательно является постоянным. Как упоминалось ранее, входное полное сопротивление внутреннего микроконтроллера имеет значение, в типичном случае находящееся в диапазоне 1-2 кГц. Вместе с тем, когда передатчик электроэнергии начинает, например, зарядку внутренней батареи приемника электроэнергии, ток, протекающий через нее, в типичном случае может достигать 1 A. Таким образом, можно ожидать столь малой нагрузки, как 3,5 Ом. Если нагрузка падает от 2 кОм до 3,5 Ом, такой же пример, как показанный на фиг.30, может привести к тем же самым параметрам (т.е., к сдвигу фазы или тактирования и длительности), как на фиг.29.
Как изображено, данные больше не являются демодулированными правильно.
Если вместо этого фазовый сдвиг изменяют, делая равным 135 градусов, как изображено на фиг.31, надежность связи даже снижается. Вместе с тем, если сдвиг изменяют, делая равным 45 градусов, передатчик электроэнергии правильно демодулирует данные, как показано на фиг.32.
Таким образом, как недвусмысленно изображено, максимальная глубина демодуляции или модуляции зависит от нагрузки сигнала передачи электроэнергии. В некоторых вариантах осуществления, возможно обнаружение изменения нагрузки, и это обнаружение может инициировать адаптацию тактирования измерений или фазового сдвига, чтобы подтвердить, что сигнал демодулируется при оптимальной глубине его модуляции.
В вышеизложенном описании основное внимание уделялось зачастую преимущественному примеру, в котором сигнал передачи электроэнергии используется также для модуляции нагрузки, а значит - и в котором сигнал передачи электроэнергии также выполняет функции индуцированного сигнала несущей для модуляции нагрузки приемником электроэнергии.
Вместе с тем, в других вариантах осуществления, связь за счет модуляции нагрузки возможна посредством отдельного индукционного сигнала несущей, который может генерироваться, например, не тем индуктором, не в те моменты времени и/или с не теми характеристиками, о которых шла речь в контексте сигнала передачи электроэнергии.
Например, в некоторых вариантах осуществления, передатчик электроэнергии может содержать индуктор для передачи электроэнергии в дополнение к индуктору 103 передатчика. Возбуждение индуктора для передачи электроэнергии возможно посредством сигнала питания возбуждения, вследствие чего генерируется сигнал передачи электроэнергии. Возбуждение индуктора 103 передатчика возможно и посредством другого сигнала возбуждения, вследствие чего генерируется индуцированный сигнал несущей, который можно использовать для модуляции нагрузки приемником электроэнергии, но который не в состоянии обеспечить какую-либо - или может обеспечить лишь ограниченную - пропускную способность по электроэнергии.
Следует понимать, что описание, представленное ранее, и комментарий, касающийся генерирования и демодуляции сигнала передачи электроэнергии, с тем же успехом применимы к сценарию, в котором происходит генерирование индуцированного сигнала несущей, который не передает электроэнергию. Например, можно использовать инвертор для генерирования сигнала возбуждения, который, когда его подают в индуктор передатчика, генерирует индуцированный сигнал несущей. Конкретно, описываемые подходы к адаптации демодуляции (а в частности - длительностей тактирования измерений) с тем же успехом применимы к сценарию, в котором второй - отдельный - индуктор выдает второй индукционный сигнал, используемый для передачи электроэнергии.
Например, передатчик электроэнергии может содержать две катушки или два индуктора, один - для электроэнергии, а другой - для связи (индуктор 103 передатчика). Возможно возбуждение обоих индукторов посредством разных - отдельных - сигналов возбуждения, вследствие чего происходит генерирование по отдельности сигнала передачи электроэнергии и индуцированного сигнала несущей для модуляции нагрузки, соответственно. Оба эти сигнала можно генерировать так, как описано ранее, но в типичном случае они могут иметь разные характеристики. В самом деле, в типичном случае характеристики генерирующего сигнала передачи электроэнергии имеют целью обеспечение высокой пропускной способности по электроэнергии, а как правило - использование, например, частоты примерно 20-60 кГц. Катушка связи (индуктор 103 передатчика) вместо вышеописанного назначения может иметь целью облегчение или оптимизацию связи при модуляции нагрузки, а ее возбуждение в типичном случае происходит на гораздо более высокой частоте (обычно находящейся в диапазоне от нескольких сотен килогерц до МГц). Это может обеспечить дифференциацию между разными сигналами и может повысить надежность связи.
В некоторых вариантах осуществления возможно также мультиплексирование сигналов. А именно, можно зарезервировать периоды времени для передачи электроэнергии, а другие периоды времени можно зарезервировать для связи (т.е., система может чередовать интервалы передачи электроэнергии и связи).
В таком варианте осуществления, индуцированный сигнал несущей может также быть способным обеспечить некоторую (ограниченную) электроэнергию, например, для внутренней логики управления в приемнике электроэнергии.
При такой структуре, ранее описанный подход к демодуляции, а в частности - к подход к адаптации демодуляции, применим к индуктору связи (т.е., к индуктору 103 передатчика). Таким образом, демодуляция и адаптация возможны на основе измерений напряжения индуктора или тока индуктора связи одновременно, как описано ранее для объединенного случая (т.е., случая, в котором индуцированный сигнал несущей является также сигналом передачи электроэнергии).
Следует понимать, что в вышеизложенном описании варианты осуществления изобретения - для ясности - охарактеризованы со ссылками на разные функциональные схемы, блоки и процессоры. Вместе с тем, должно быть очевидно, что в рамках объема притязаний изобретения возможно любое подходящее распределение функциональных средств между разными функциональными схемами, блоками или процессорами. Например, функциональные средства, проиллюстрированные как реализуемые с помощью отдельных процессоров или контроллеров, могут быть реализованы с помощью одного и того же процессора или контроллера. Поэтому ссылки на конкретные функциональные блоки или схемы надо рассматривать лишь как ссылки на средства, подходящие для реализации описываемых функциональных возможностей, а не как указания жесткой логической или физической структуры либо организации.
Изобретение можно воплотить в любой подходящей форме, включая аппаратное обеспечение, аппаратно-программное обеспечение, программное обеспечение или любую их комбинацию. По выбору, изобретение можно воплотить, по меньшей мере - частично, в виде программного обеспечения компьютера, которое запускают на одном или нескольких процессорах данных и/или процессоров для цифровой обработки сигналов. Элементы и компоненты согласно варианту осуществления изобретения можно реализовать физически, функционально и логически любым подходящим способом. В самом деле, функциональные средства можно воплотить в одном-единственном блоке, во множестве блоков или как часть разных функциональных блоков. Как таковое, изобретение можно воплотить в одном-единственном блоке, или можно физически и функционально распределить между разными блоками, схемами и процессорами.
Хотя данное изобретение описано в связи с некоторыми вариантами осуществления, его не следует считать сводящимся к конкретной форме, о которой здесь шла речь. Наоборот, объем притязаний данного изобретения ограничен только прилагаемой формулой изобретения. Кроме того, хотя некоторый признак может быть в явном виде охарактеризован в связи с конкретными вариантами осуществления, специалист в данной области техники поймет, что различные признаки описываемых вариантов осуществления можно объединять в соответствии с изобретением. В формуле изобретения, термин «содержащий (-ая, -ее, -ие) не исключает присутствие других элементов или этапов.
Помимо этого, несмотря на перечисление по отдельности, множеств средств, элементов, схем или этапов способа можно воплотить, например, в одной-единственной схеме, одном-единственном блоке или процессоре.
Кроме того, хотя индивидуальные признаки могут быть включены в разные пункты формулы изобретения, их можно с выгодой объединять, а включение их в разные пункты формулы изобретения не свидетельствует, что комбинация признаков неосуществима и/или невыгодна. Помимо этого, включение некоторого признака в одну категорию пунктов формулы изобретения не ограничивает изобретение этой категорией, а скорее указывает, что этот признак с тем же успехом применим для других категорий пунктов формулы изобретения, если это уместно.
В дополнение к этому, порядок указания признаков в пунктах формулы изобретения не свидетельствует о конкретном порядке, в каком эти признаки должны работать; в частности, порядок отдельных этапов в пункте формулы на способ не свидетельствует, что что этапы обязательно надо проводить в этом порядке. Наоборот, этапы можно проводить в любом подходящем порядке. В дополнение к этому, указания единственного числа не исключают множество.
Таким образом указания признаков единственного числа, числительных «первый», «второго», и т.д., не исключают множество. Позиции чертежей в формуле изобретения представлены просто в качестве поясняющего примера, и их ни в коем случае не следует воспринимать как ограничивающие объем притязаний формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2015 |
|
RU2692482C2 |
| БЕСПРОВОДНОЙ ИНДУКТИВНЫЙ ПЕРЕНОС ПИТАНИЯ | 2017 |
|
RU2706348C1 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2012 |
|
RU2604634C2 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2015 |
|
RU2684403C2 |
| СИСТЕМА БЕСПРОВОДНОЙ ПЕРЕДАЧИ МОЩНОСТИ | 2019 |
|
RU2777986C2 |
| ПЕРЕДАТЧИК ЭНЕРГИИ И ПРИЕМНИК ЭНЕРГИИ ДЛЯ ИНДУКТИВНОЙ СИСТЕМЫ ПЕРЕДАЧИ ЭНЕРГИИ | 2011 |
|
RU2588579C2 |
| БЕСПРОВОДНАЯ ПЕРЕДАЧА ИНДУКТИВНОЙ МОЩНОСТИ | 2014 |
|
RU2658864C2 |
| БЕСПРОВОДНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2019 |
|
RU2786083C2 |
| ТЕПЛОВОЙ БАРЬЕР ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ МОЩНОСТИ | 2014 |
|
RU2666793C2 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2016 |
|
RU2696491C1 |
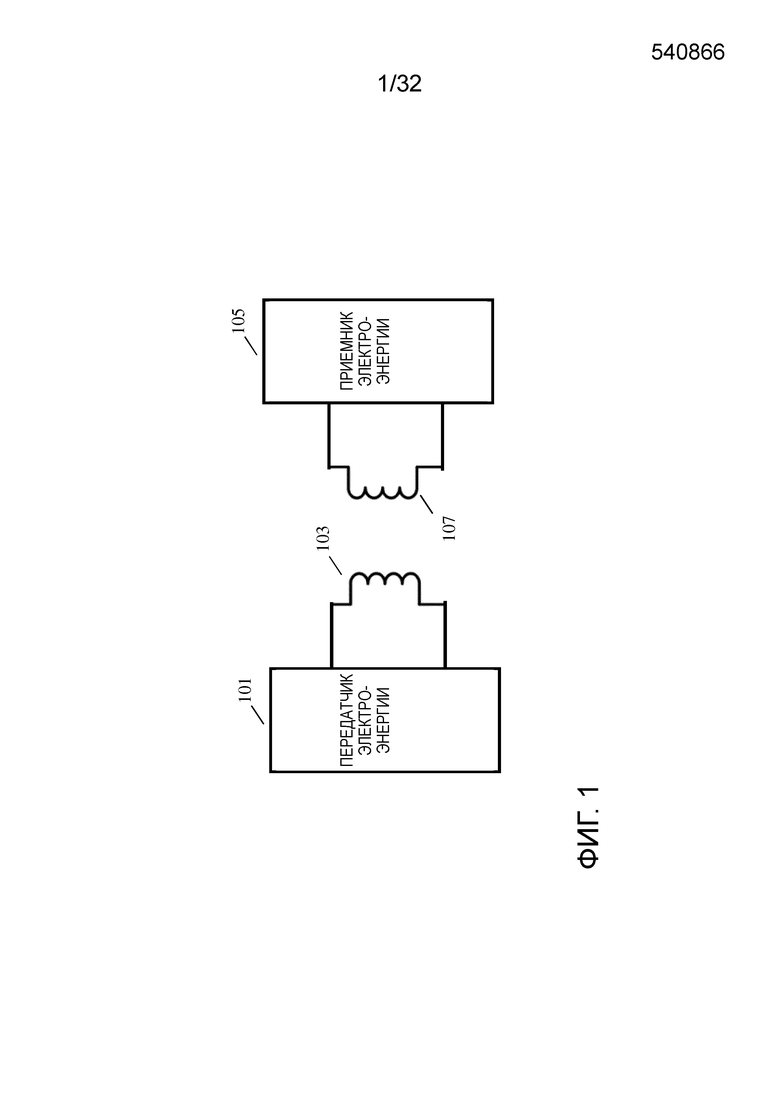
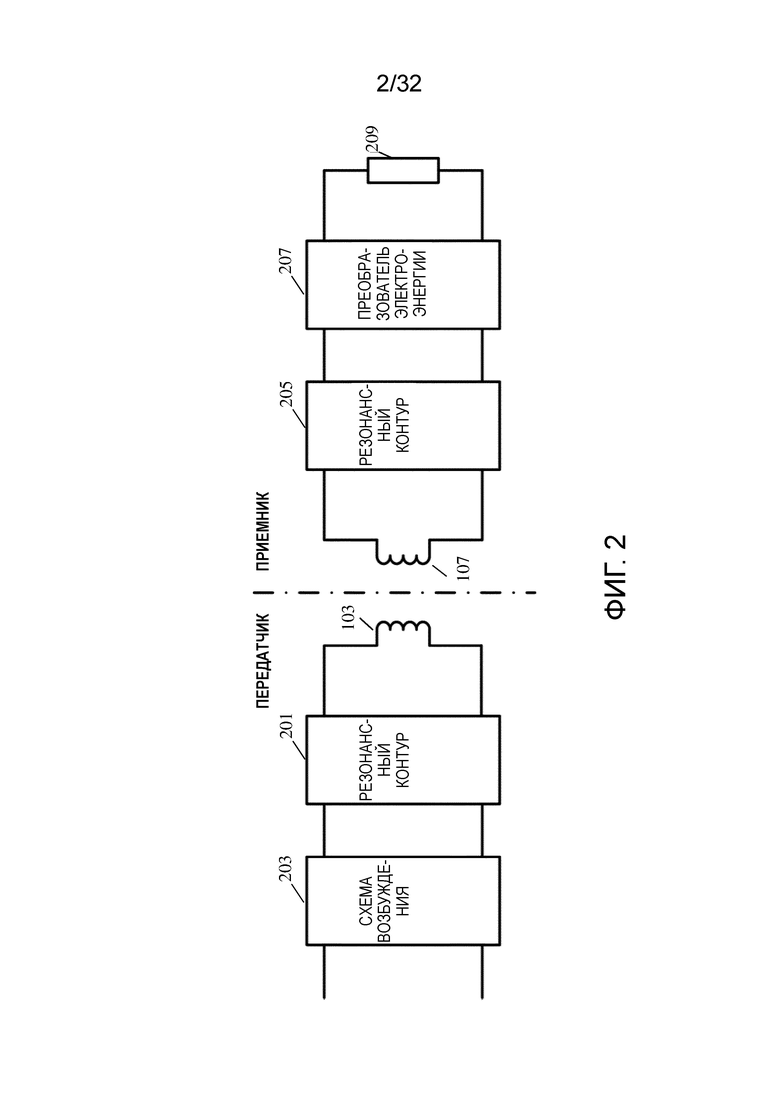
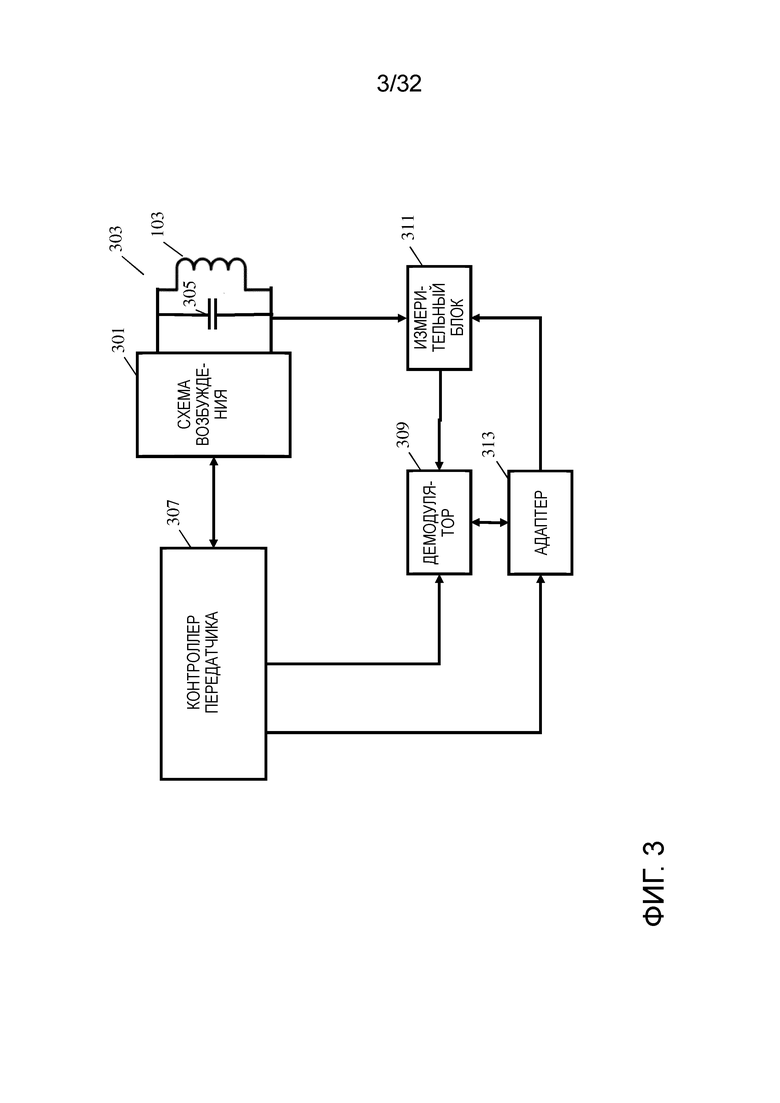
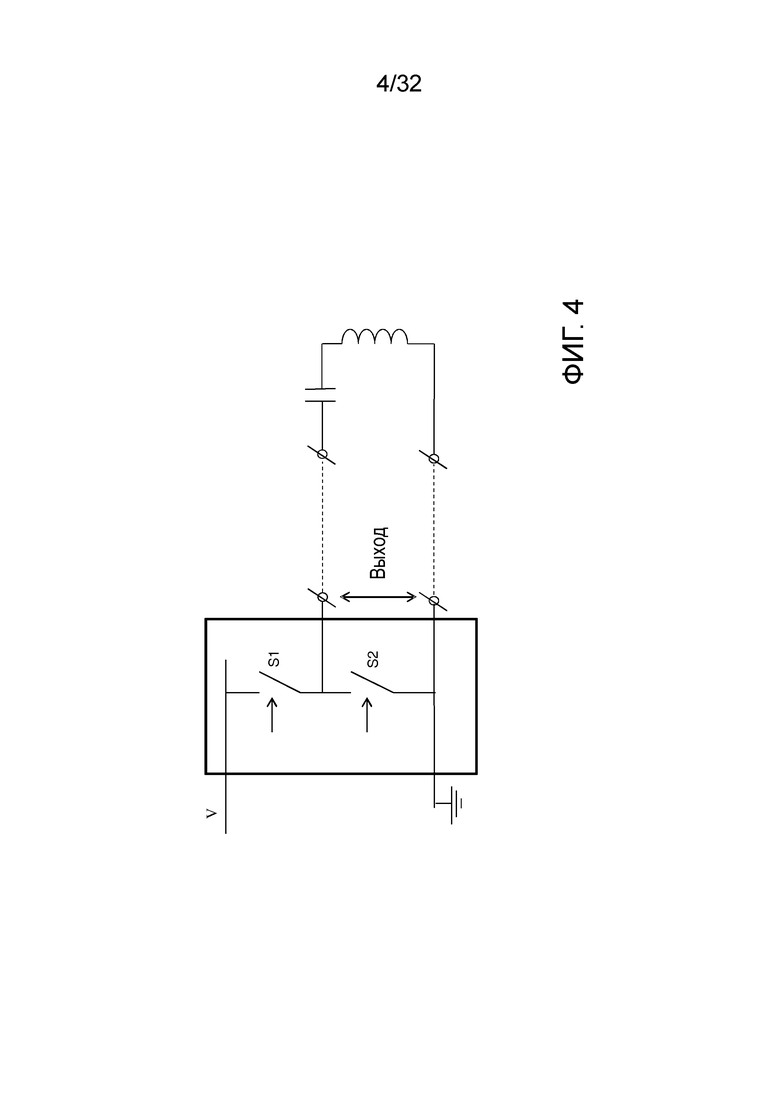
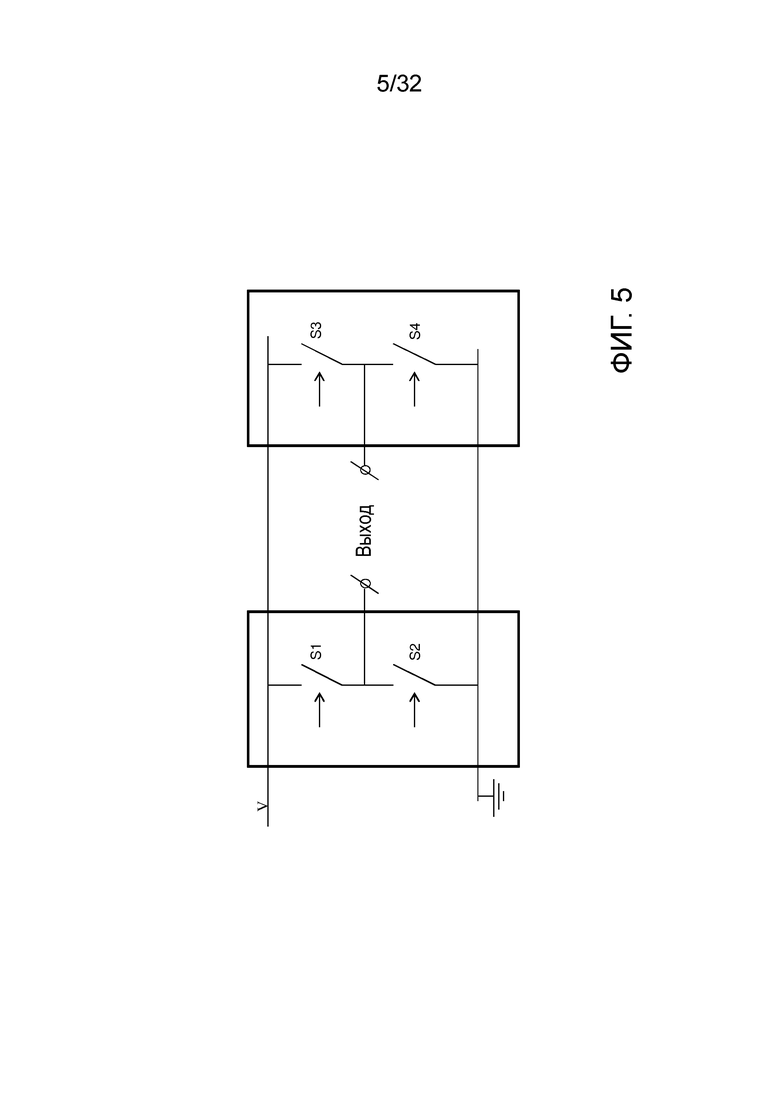
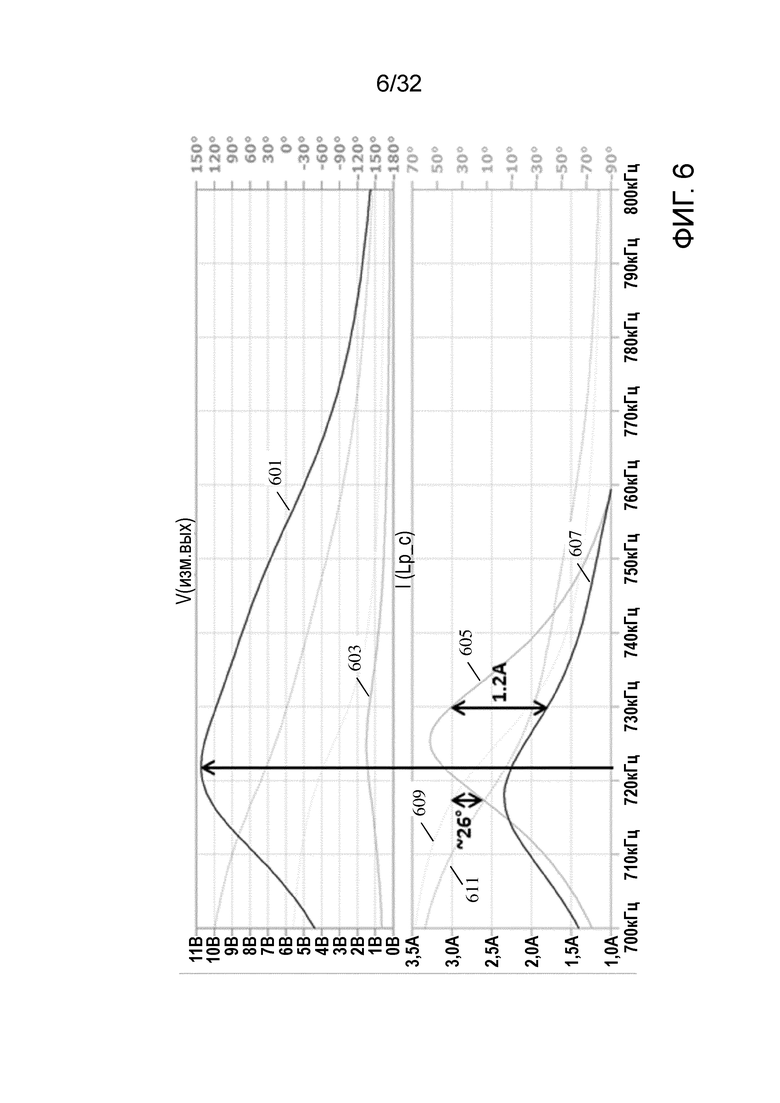
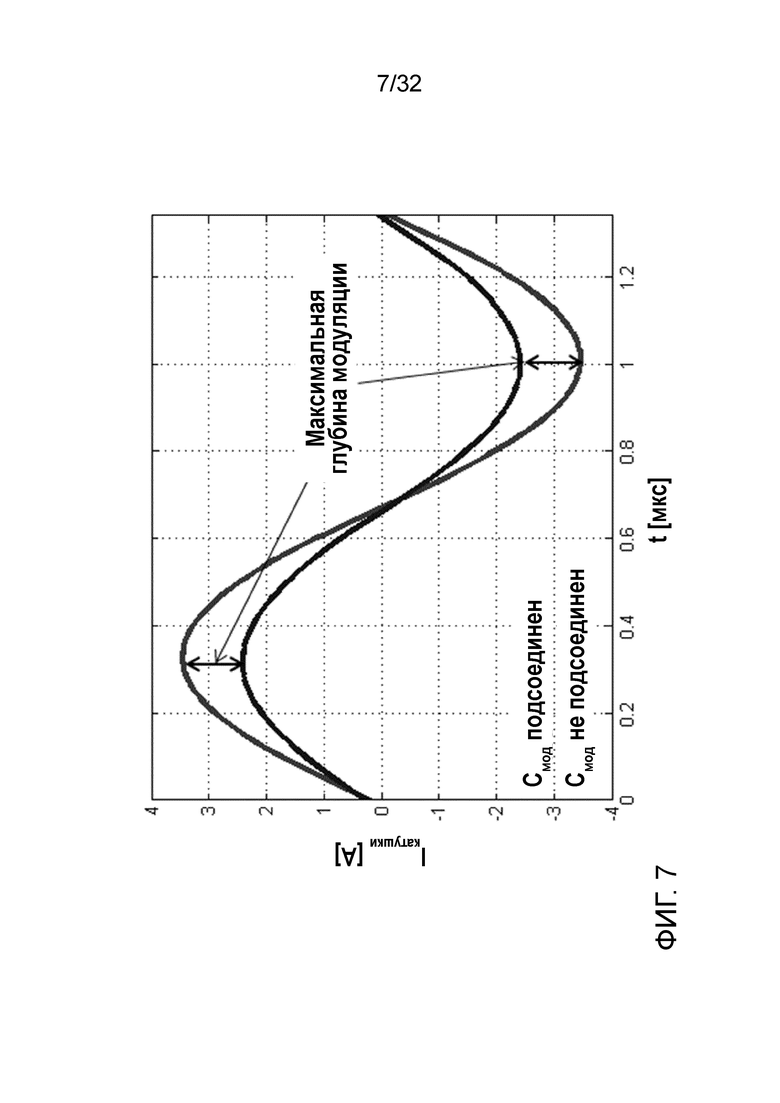
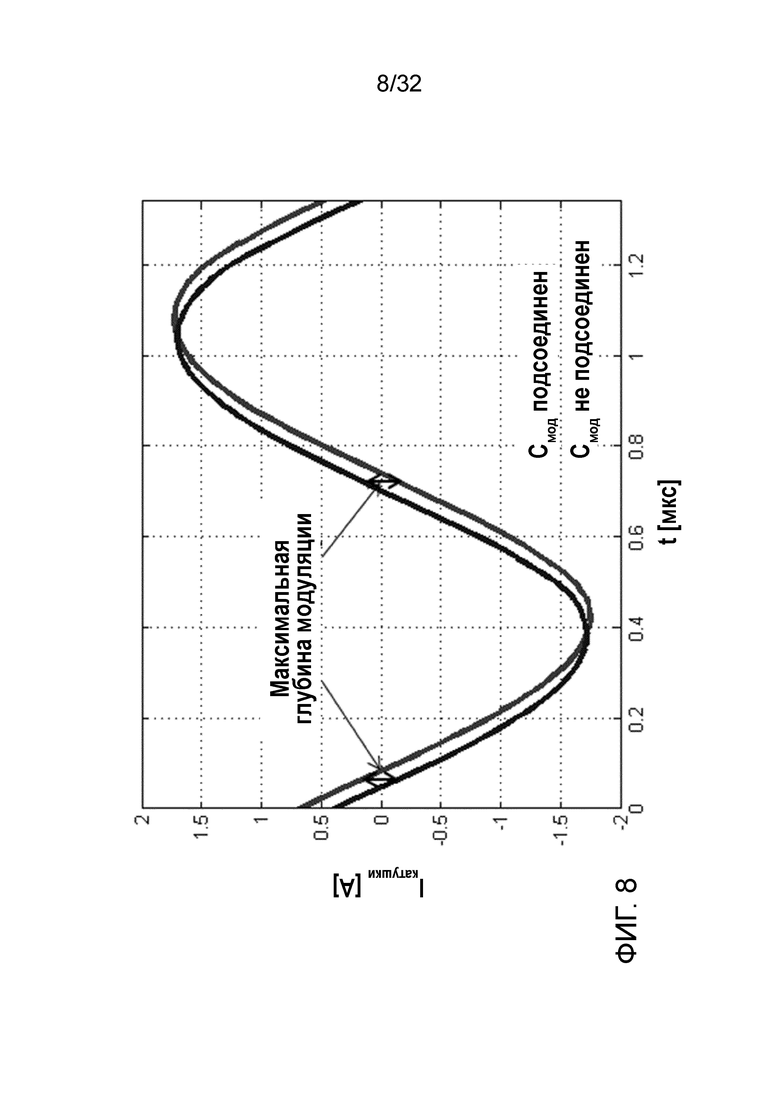
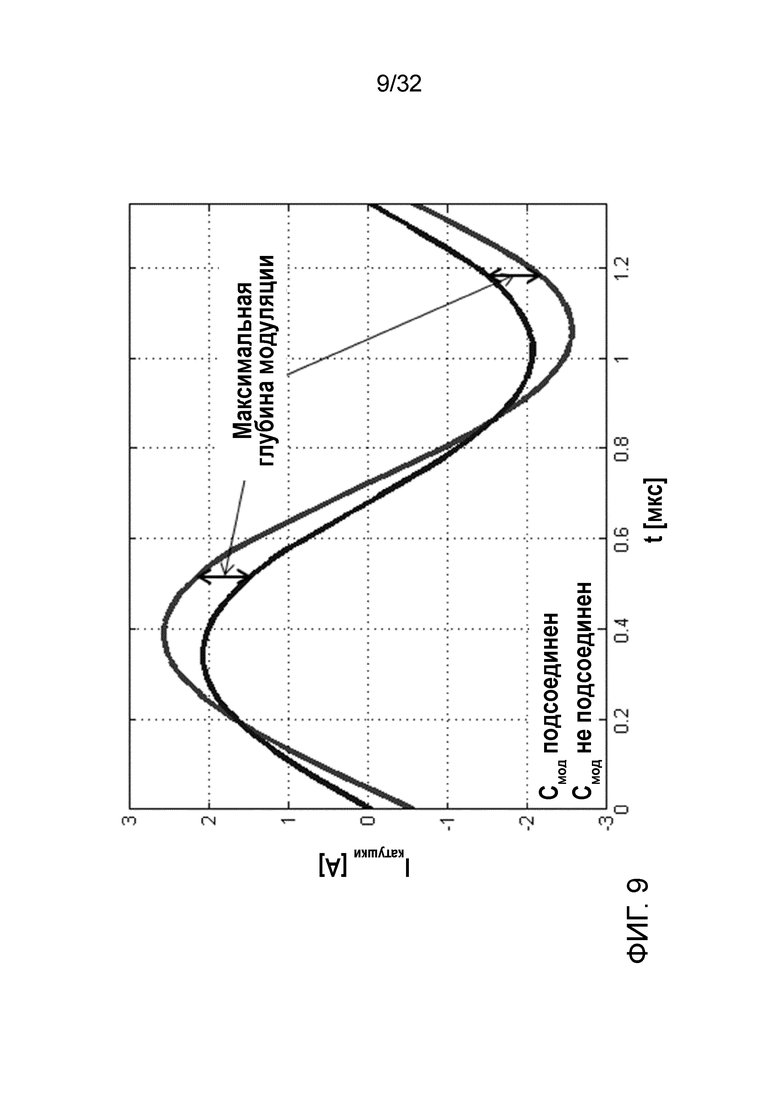

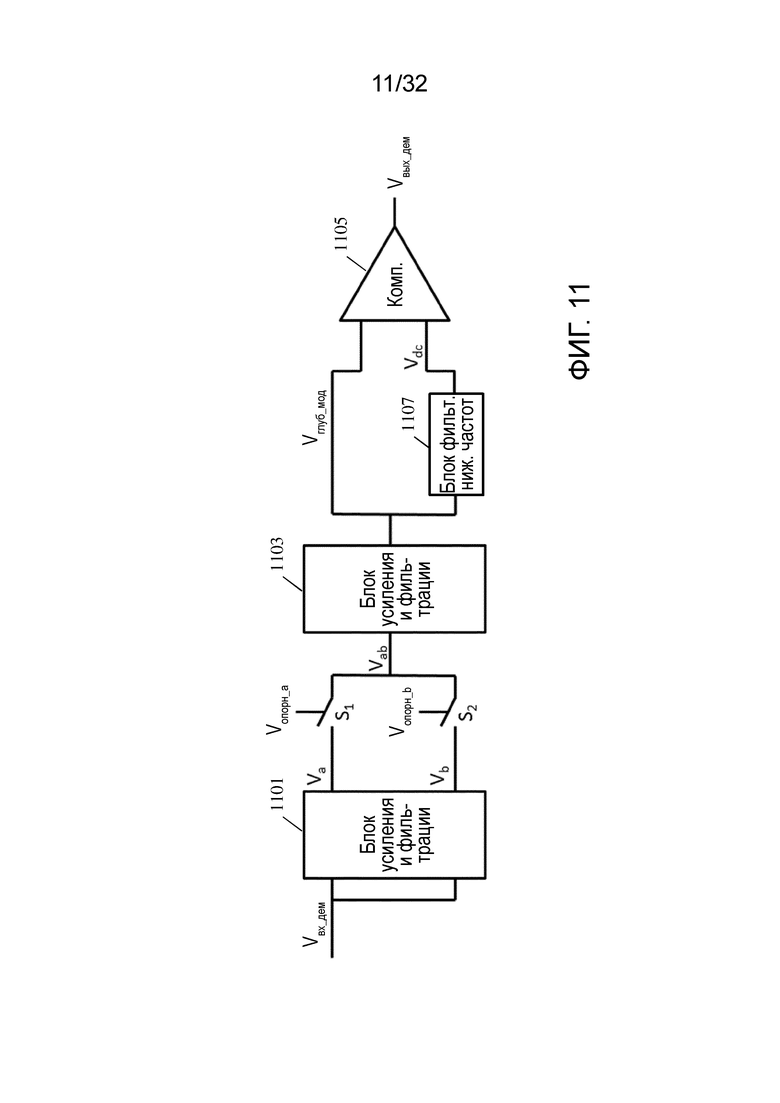
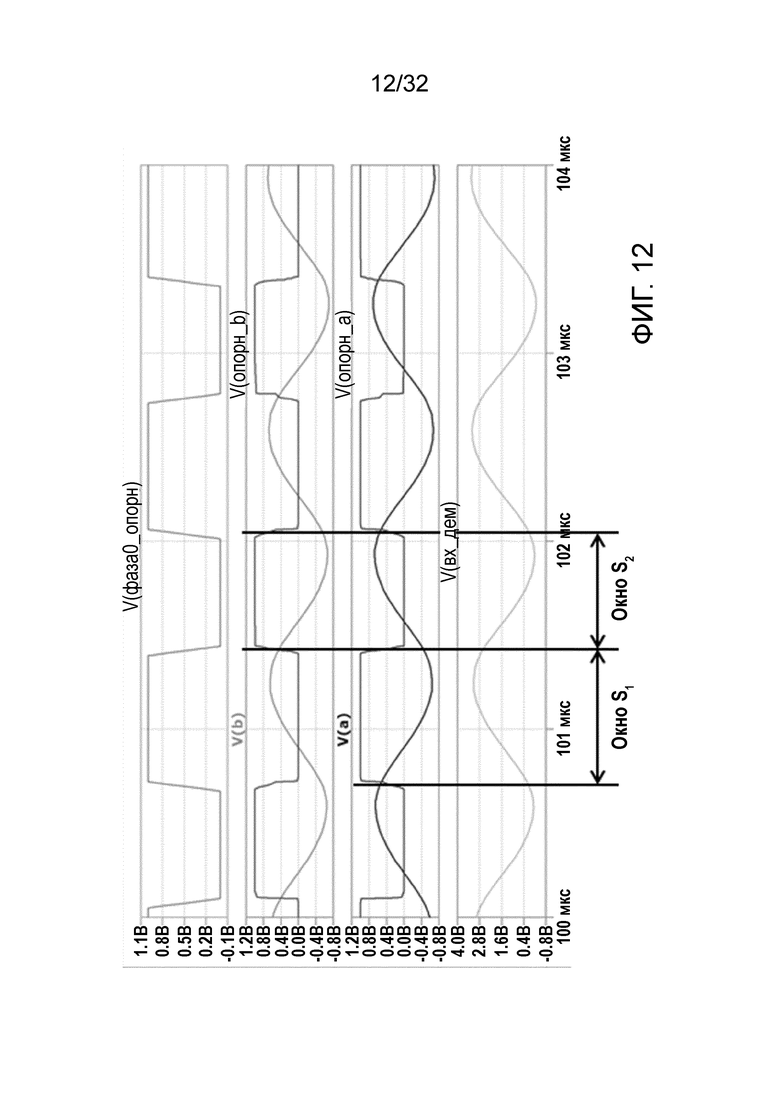
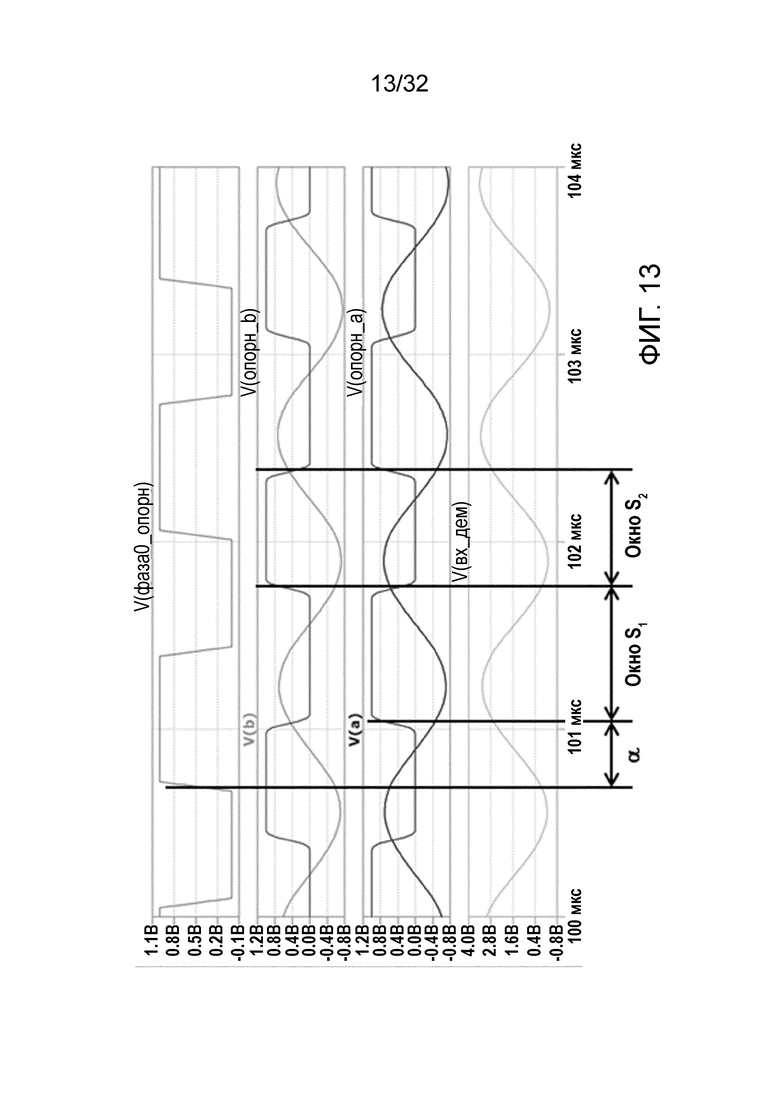
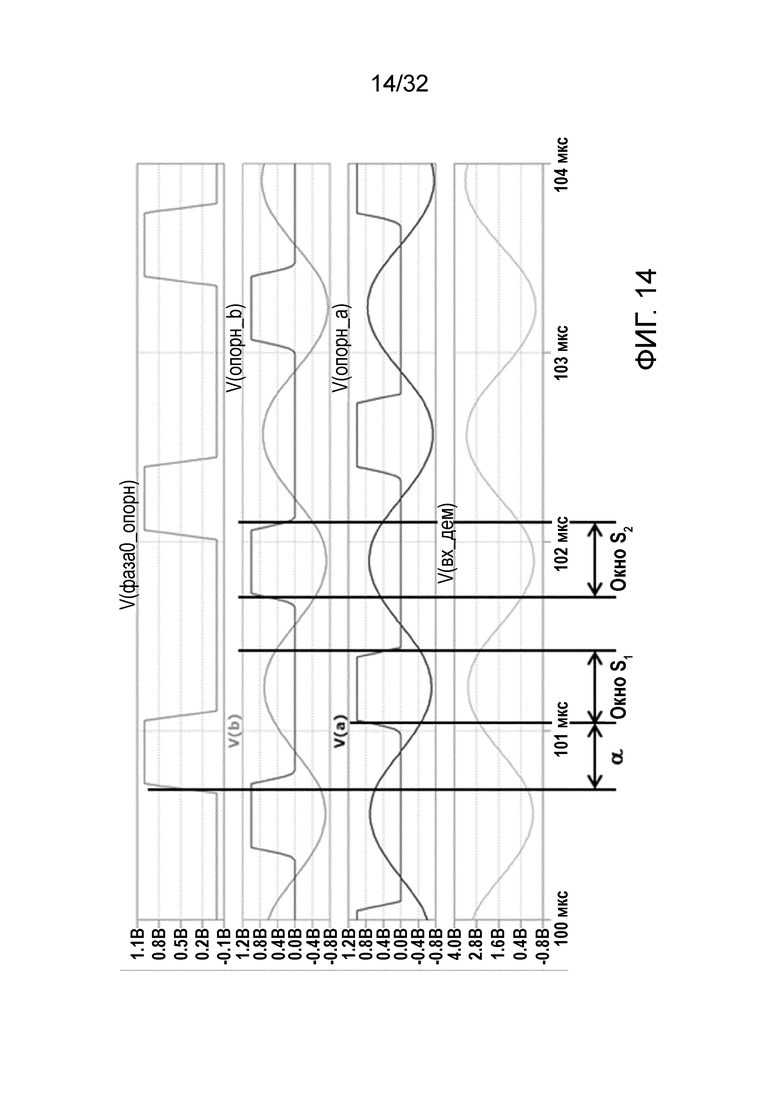
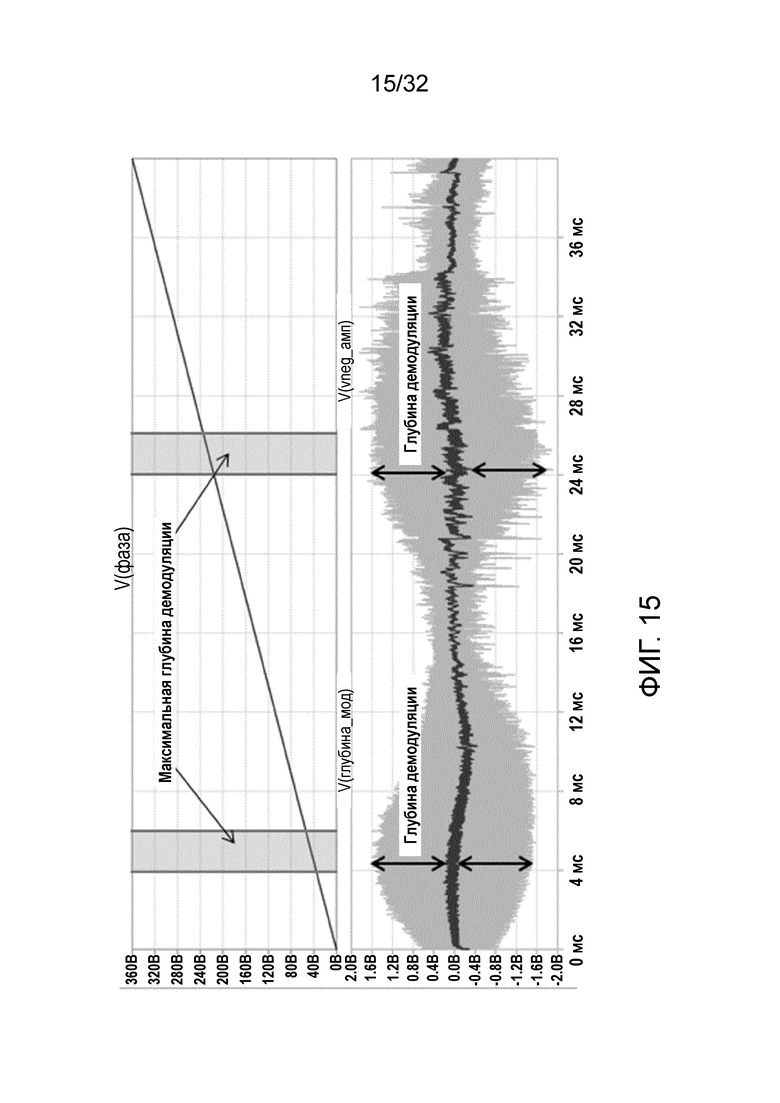
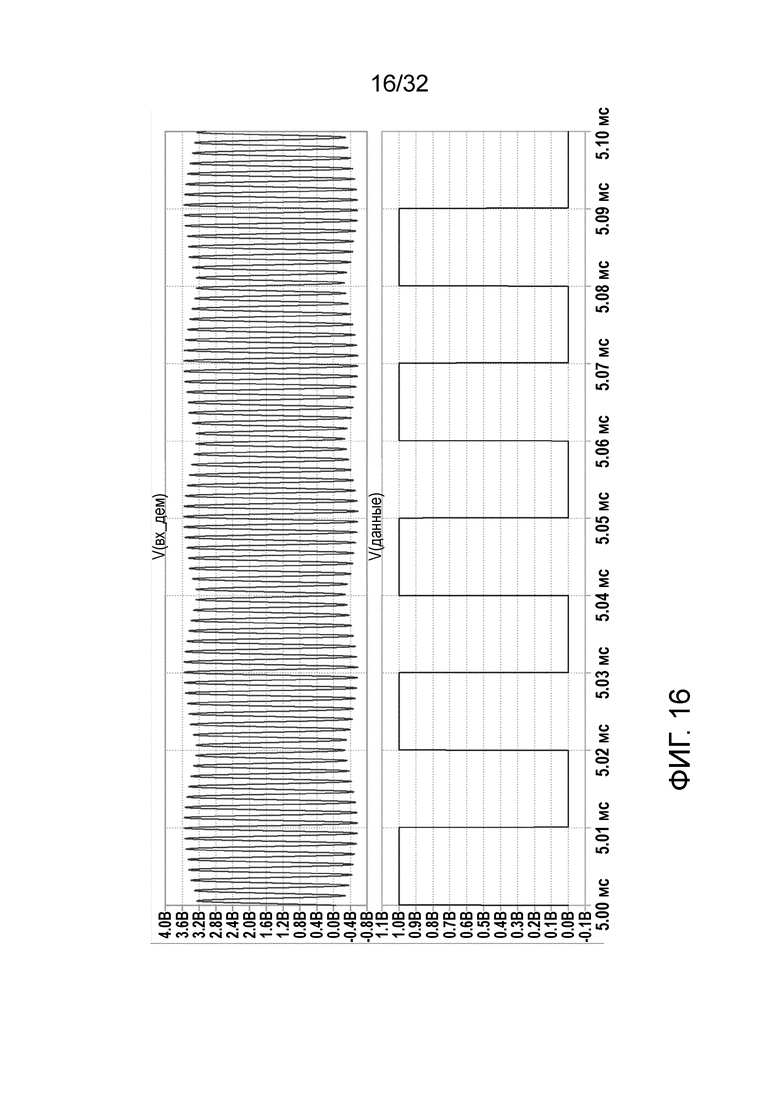
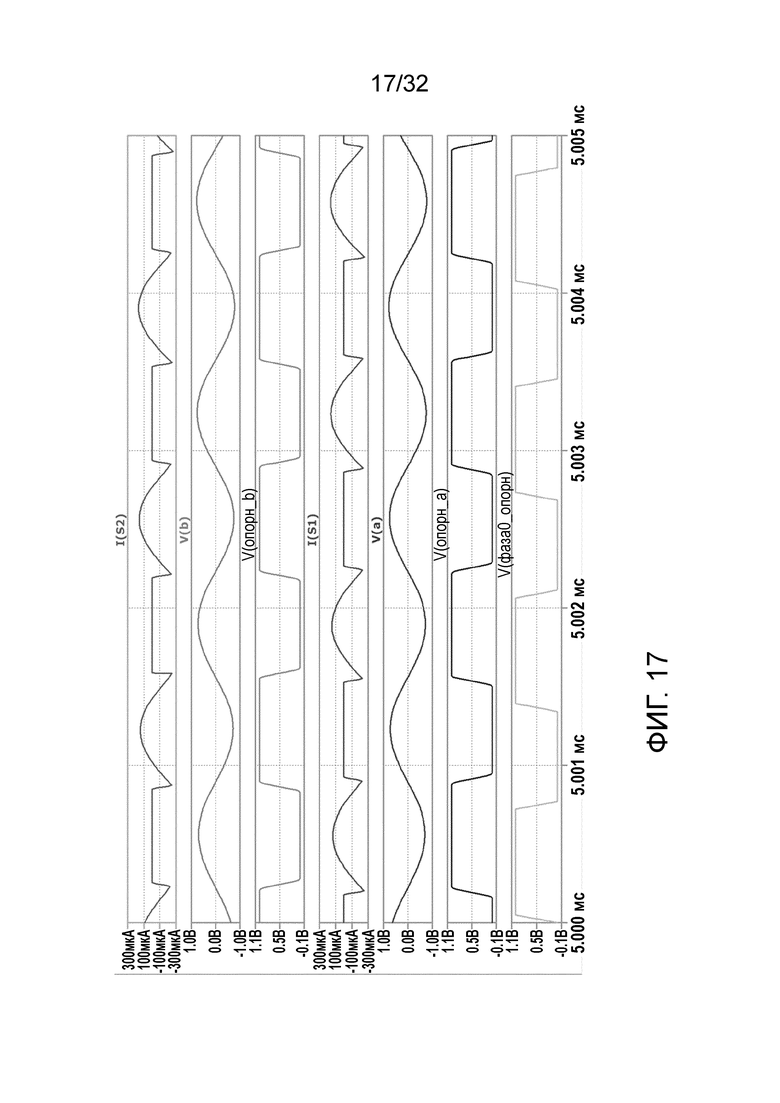
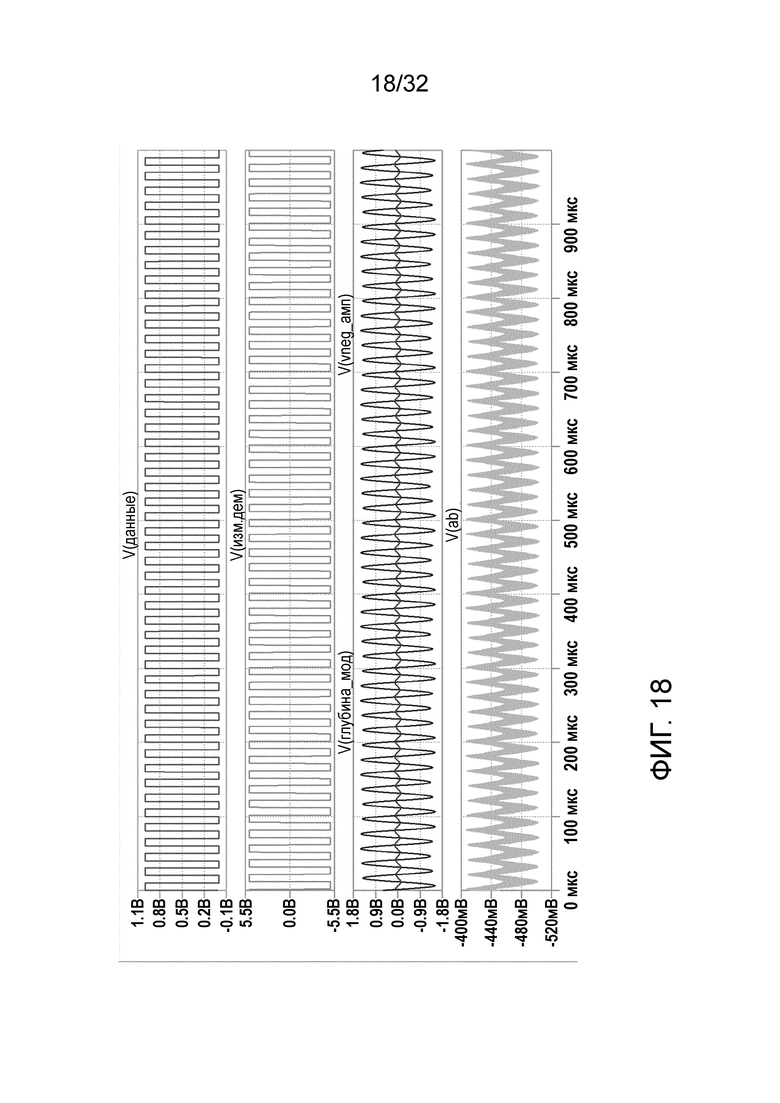
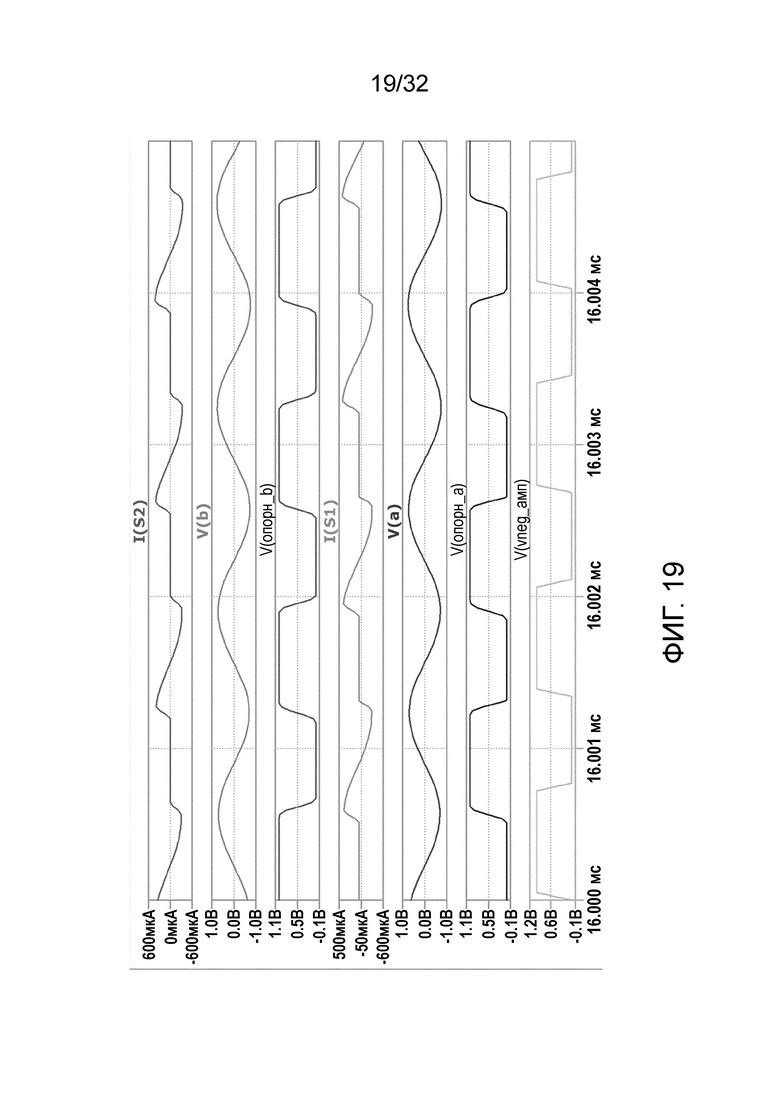
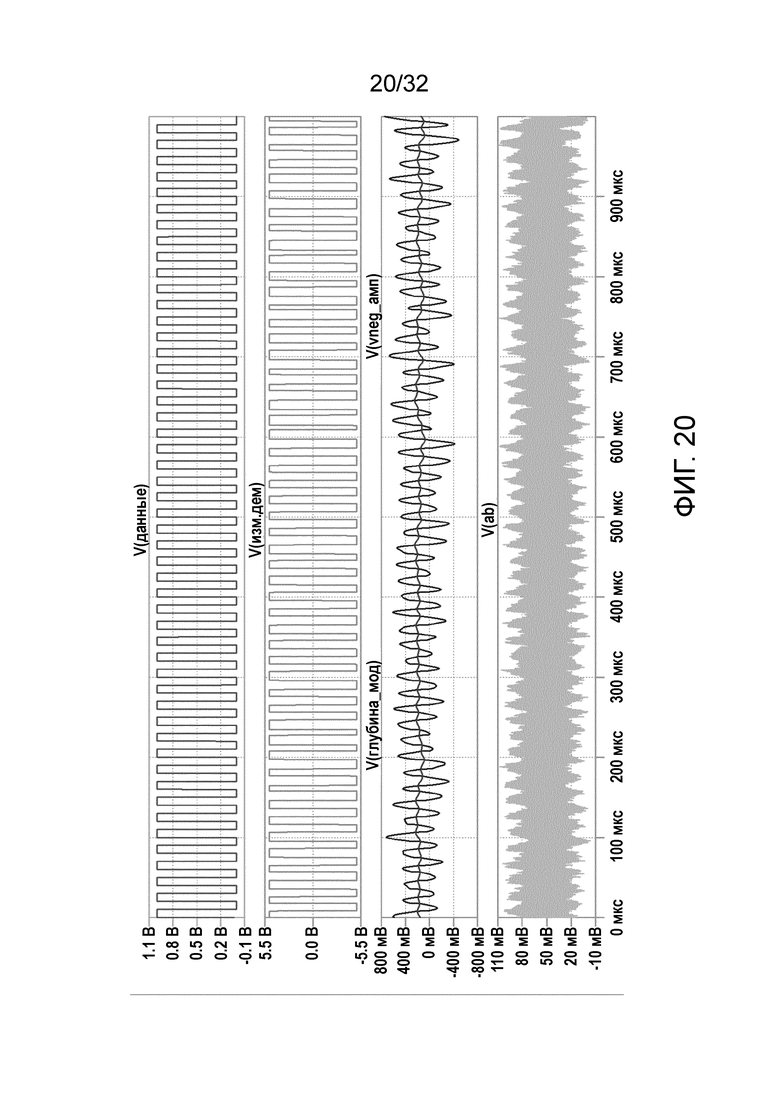
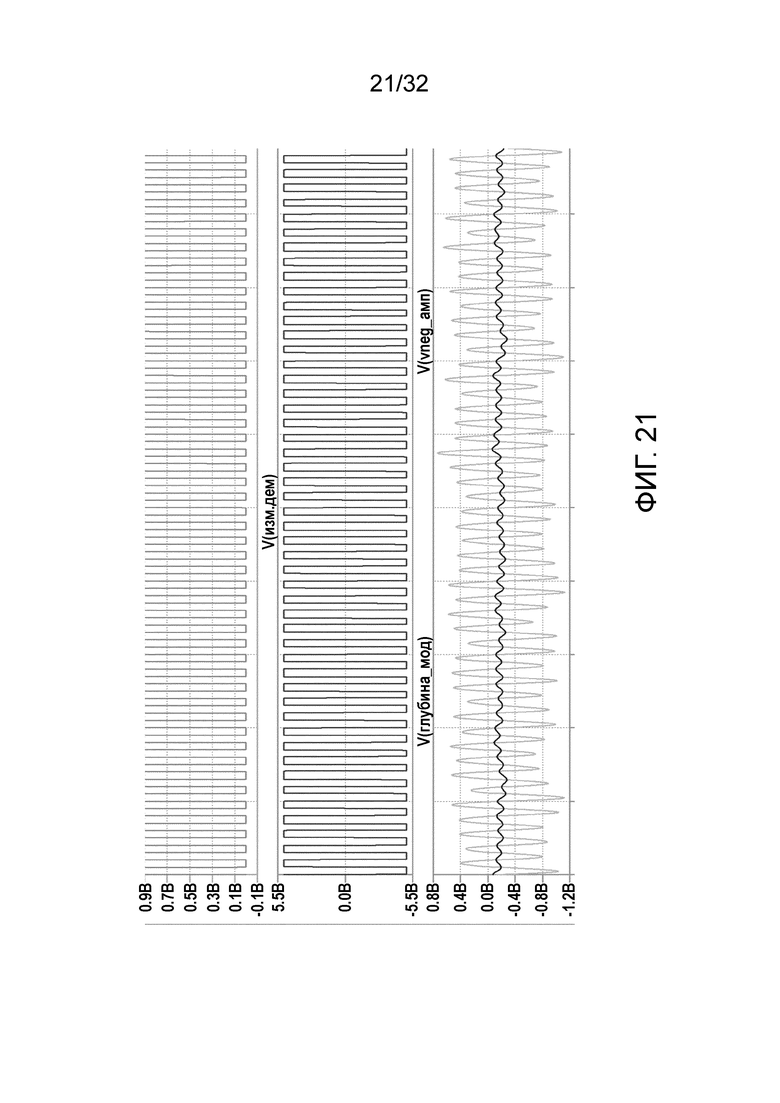
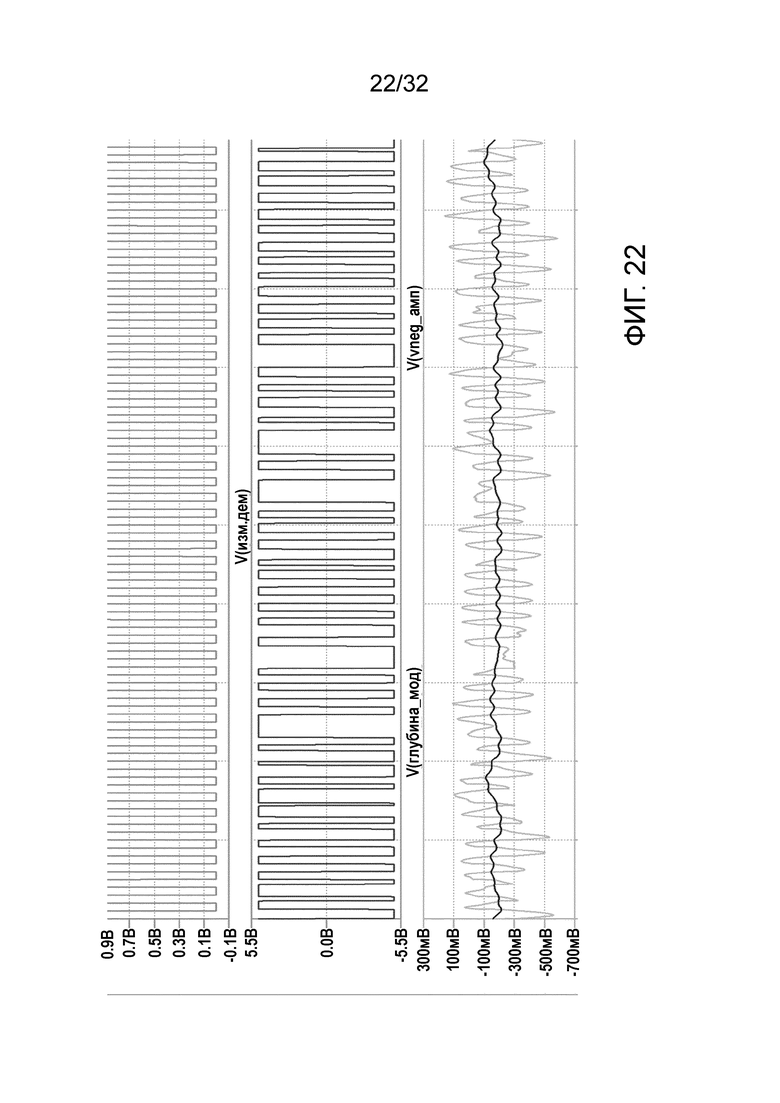

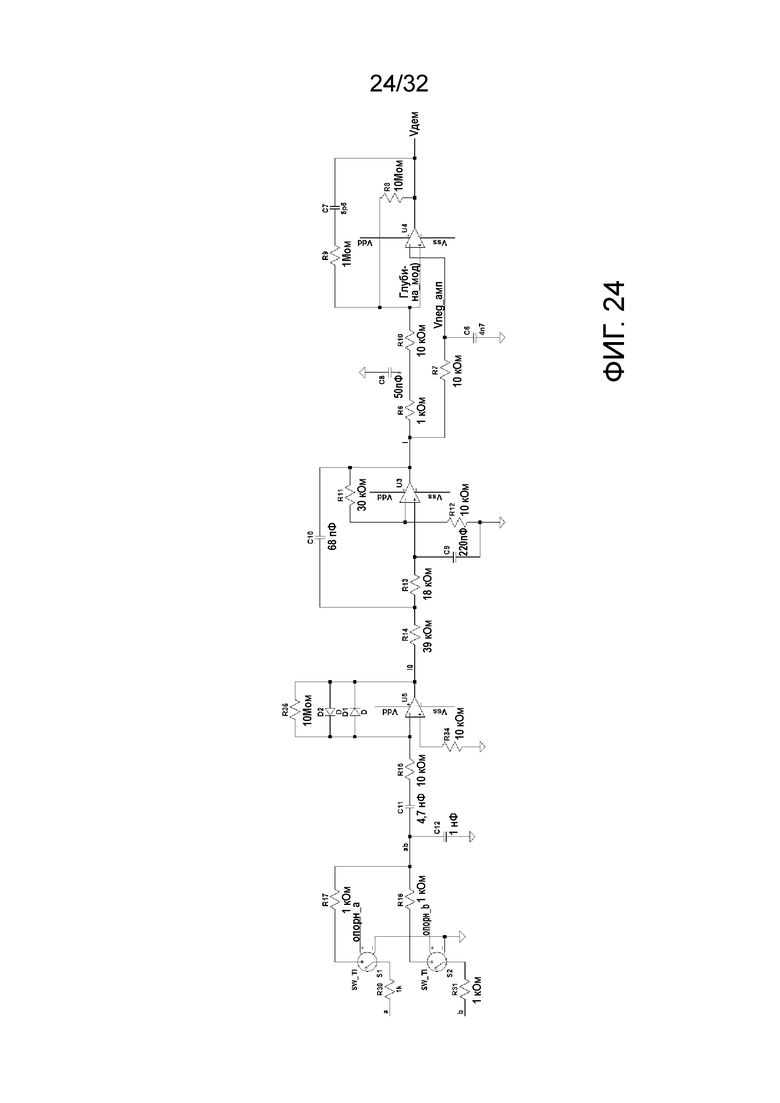
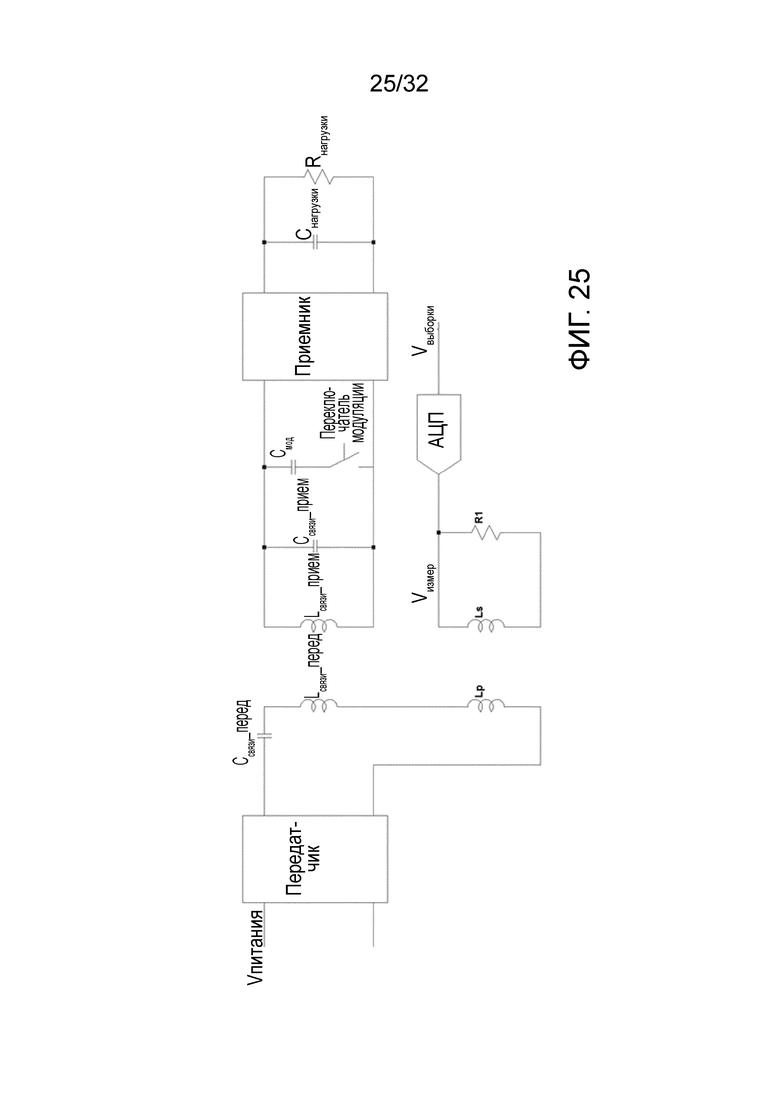
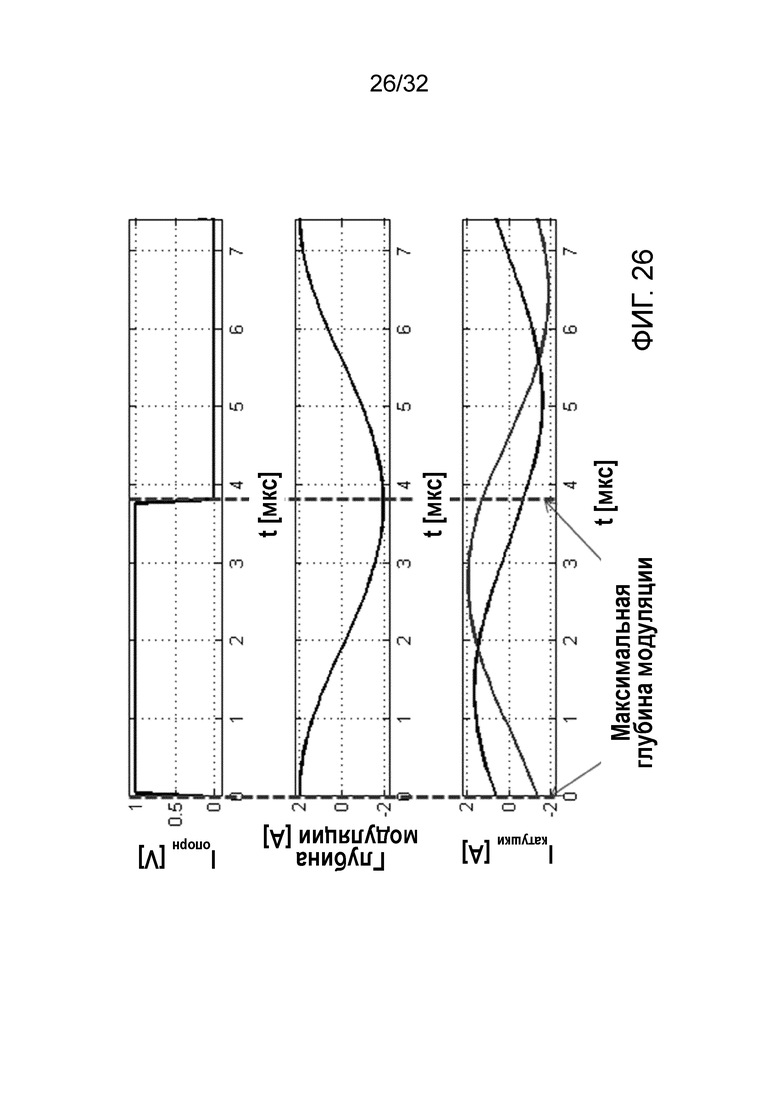
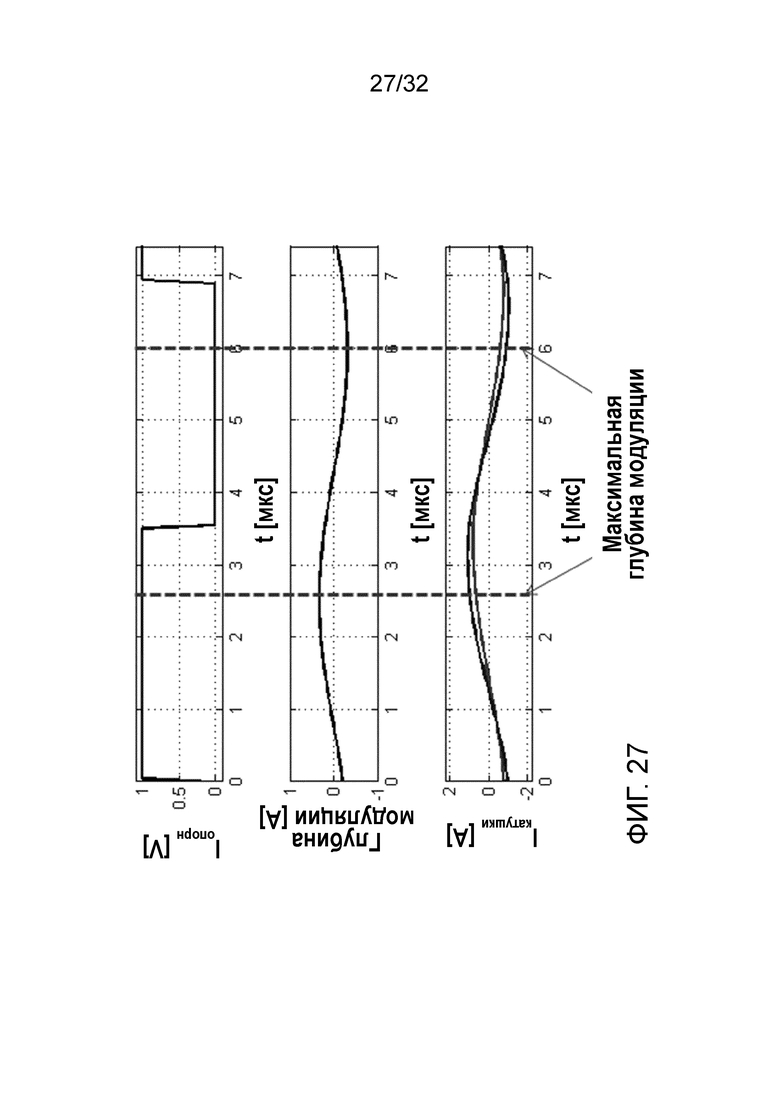
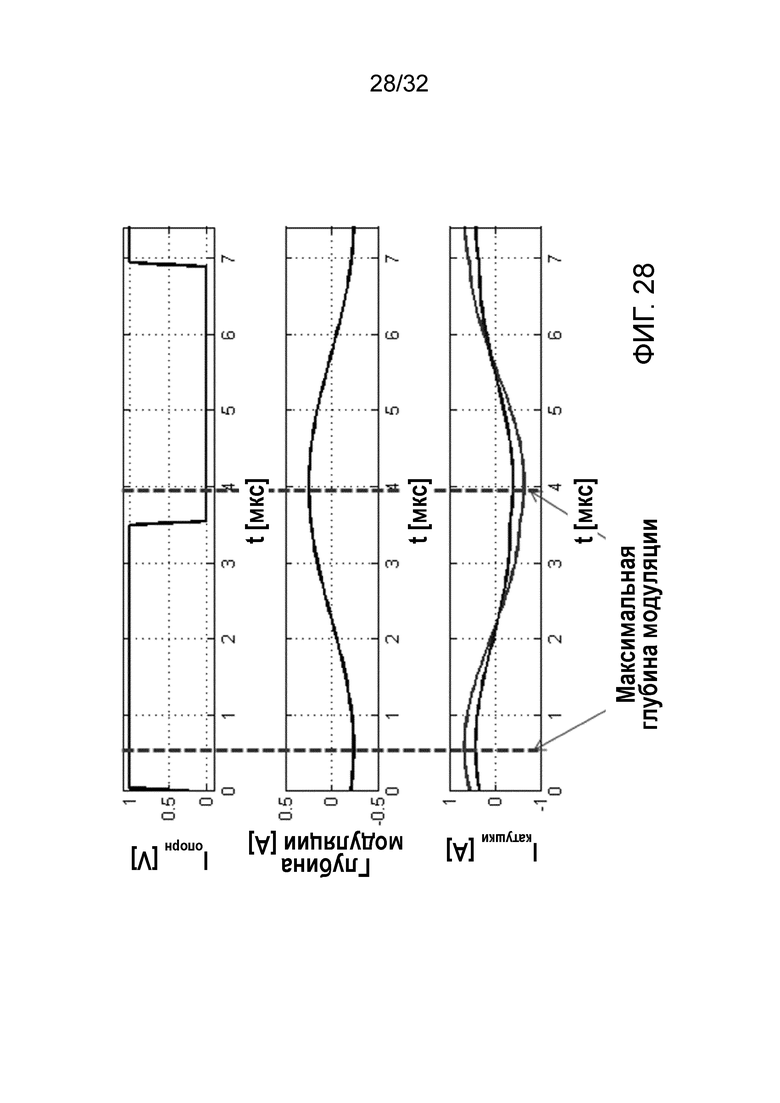
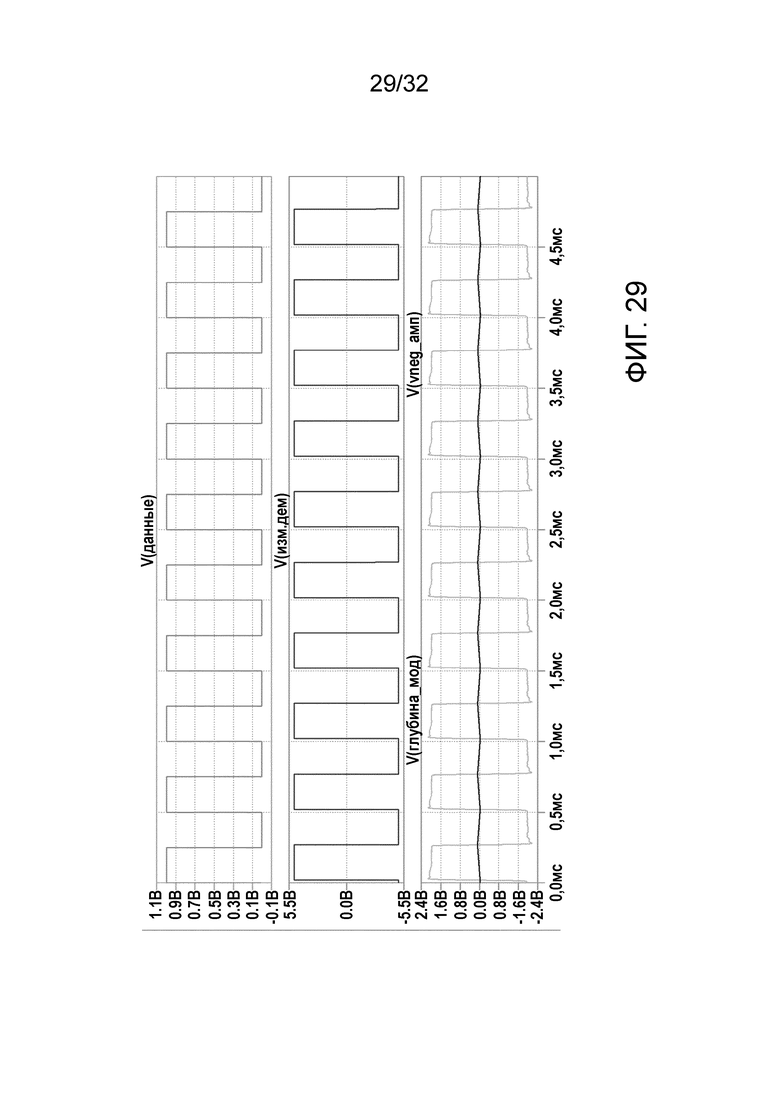
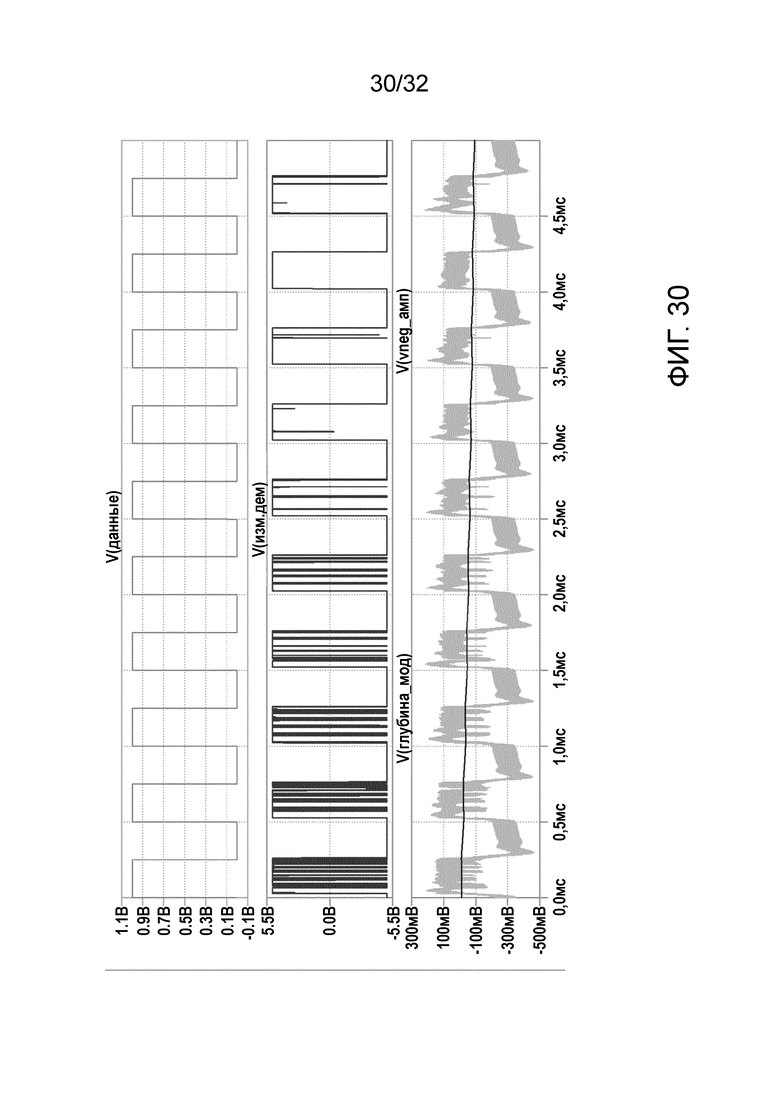
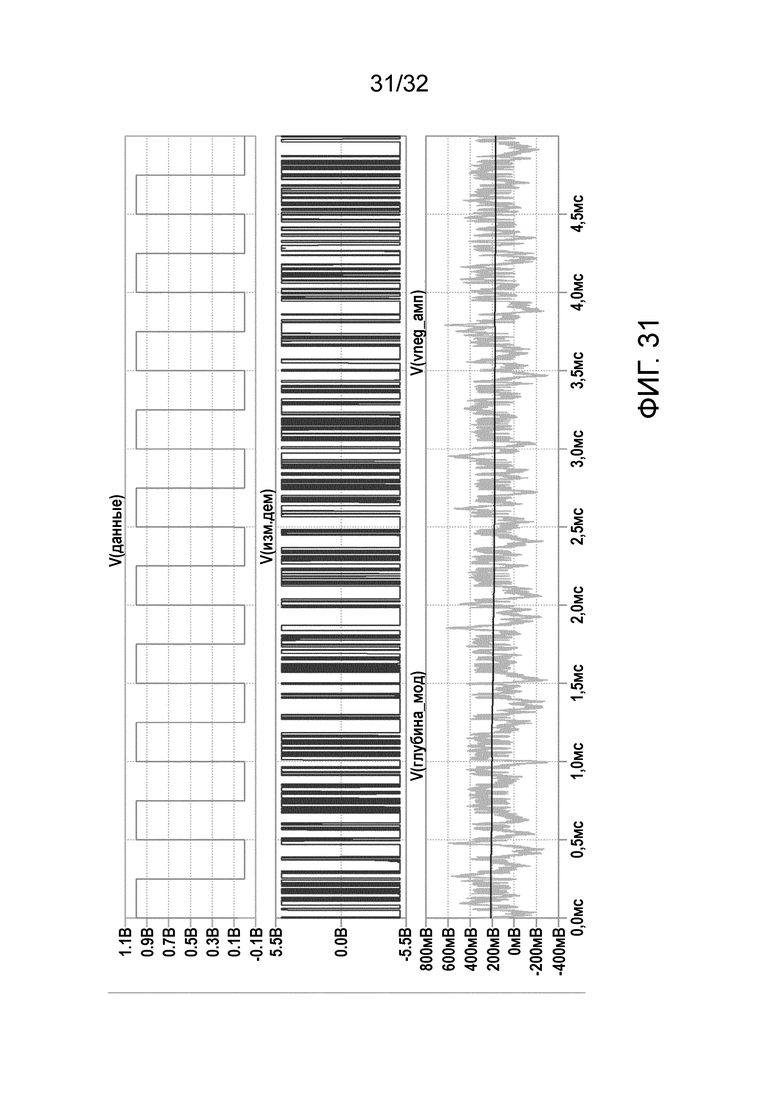
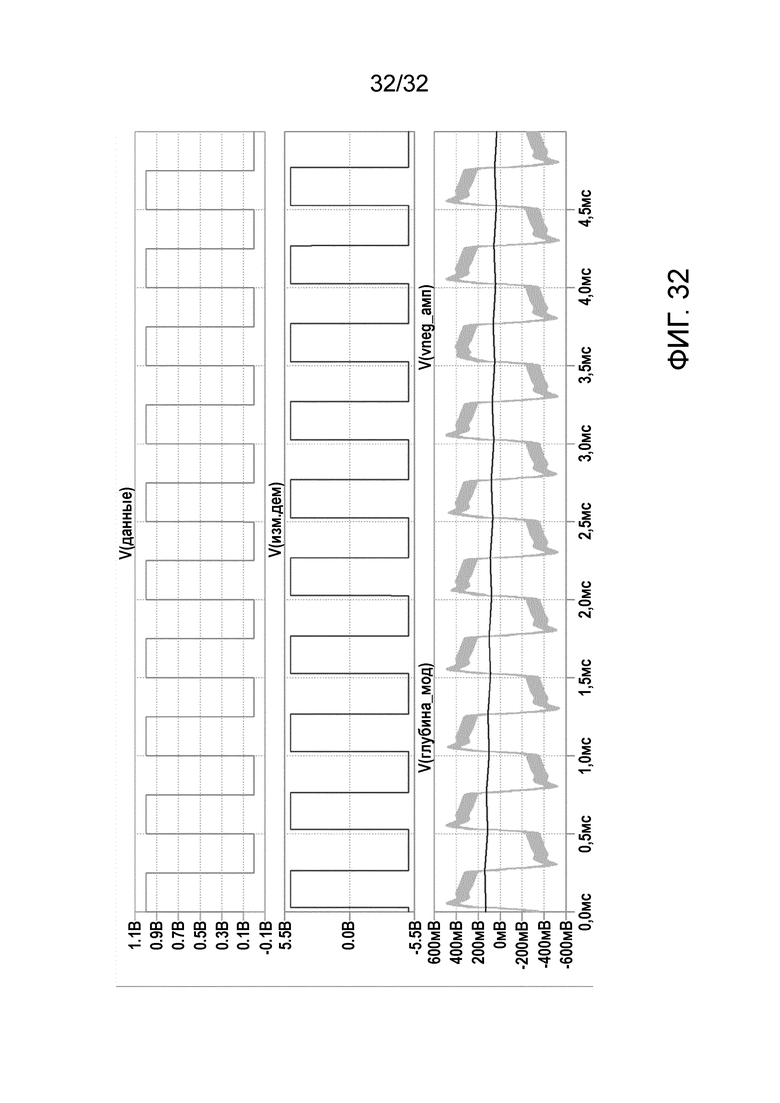
Использование: в области электротехники. Технический результат – обеспечение надежной связи при увеличенном расстоянии между катушками приемника электроэнергии и передатчика электроэнергии. Передатчик (101) электроэнергии обеспечивает передачу электроэнергии приемнику (105) электроэнергии с использованием беспроводной индукционной передачи электроэнергии. Передатчик (101) электроэнергии содержит индуктор (103), генерирующий индуцированный сигнал несущей, когда подается сигнал напряжения возбуждения. Измерительный блок (311) осуществляет измерения тока и напряжения индуктора (103). Измерения осуществляются с временным сдвигом относительно опорного сигнала, синхронизированного с сигналом напряжения возбуждения. Адаптер (313) может изменять временной сдвиг для определения оптимального сдвига тактирования измерений, приводящего к максимальной глубине демодуляции для глубины модуляции, которая отражает меру разности для измерений при разных нагрузках модуляции индуцированного сигнала несущей. Затем демодулятор (309) демодулирует модуляцию нагрузки индуцированного сигнала несущей, получаемого из первых измерений с первым сдвигом, который установлен равным оптимальному сдвигу тактирования измерений. В некоторых сценариях возможно изменение и тактирования, и длительности измерений. 2 н. и 12 з.п. ф-лы, 32 ил.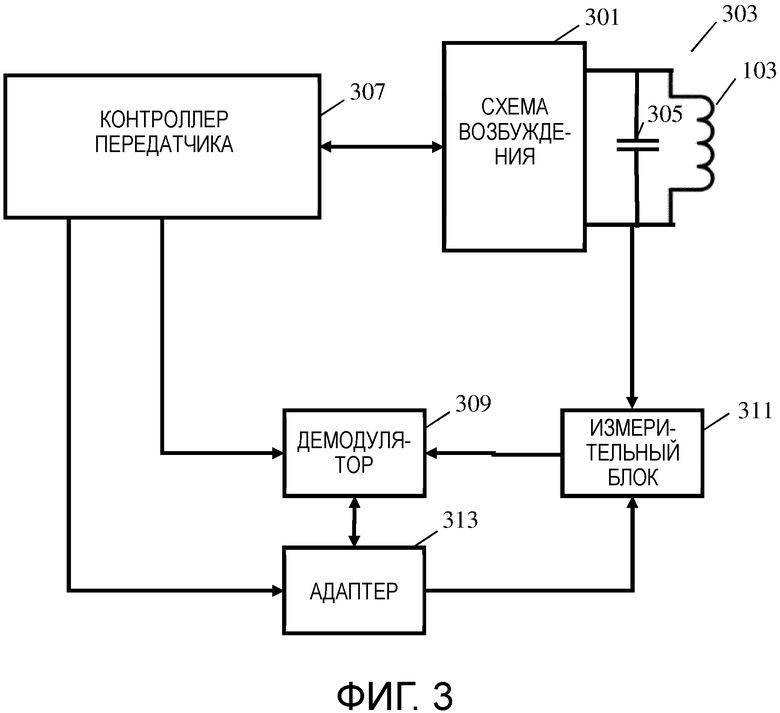
1. Передатчик (101) электроэнергии для обеспечения передачи электроэнергии приемнику (105) электроэнергии с использованием сигнала беспроводной индукционной передачи электроэнергии, причем передатчик (101) электроэнергии содержит:
индуктор (103) передатчика для генерирования индуцированного сигнала несущей с целью модуляции нагрузки в ответ на сигнал напряжения возбуждения, подаваемый, по меньшей мере, на одно из индуктора (103) передатчика и резонансного контура (303), содержащего индуктор (103) передатчика;
измерительный блок (311), выполненный с возможностью осуществления в течение циклов опорного сигнала, синхронизированного с сигналом напряжения возбуждения, - первых измерений, по меньшей мере, одного из тока индуктора и напряжения индуктора для индуктора (103) передатчика, причем каждое первое измерение происходит в течение интервала времени измерения, представляющего собой подмножество периода цикла опорного сигнала, и имеет первый временной сдвиг относительно опорного сигнала;
адаптер (313) для изменения первого временного сдвига и обнаружения оптимального сдвига тактирования измерений для изменяемого первого временного сдвига, причем оптимальный сдвиг тактирования измерений обнаруживают как временной сдвиг для изменяемого первого временного сдвига, который приводит к максимальной глубине демодуляции для глубины модуляции, отражающей меру разности для первых измерений, генерируемых измерительным блоком (311) с первым временным сдвигом при разных нагрузках модуляции индуцированного сигнала несущей;
демодулятор (309) для демодуляции модуляции нагрузки индуцированного сигнала несущей из первых измерений с первым временным сдвигом, заданным равным оптимальному сдвигу тактирования измерений; и
при этом измерительный блок (311) выполнен с возможностью осуществления измерений для различных значений изменяемого первого временного сдвига, причем адаптер (313) выполнен с возможностью определять глубину демодуляции для различных значений первого временного сдвига, отличающийся тем, что адаптер (313) выполнен с возможностью установления оптимального сдвига тактирования измерений равным значению для первого временного сдвига, для которого обнаружена наибольшая глубина демодуляции.
2. Передатчик электроэнергии по п.1, в котором адаптер (313) выполнен с возможностью изменения длительности интервала времени измерения для определения оптимальной длительности измерения, приводящей к максимальной глубине демодуляции, и
демодулятор (309) выполнен с возможностью демодулировать модуляцию нагрузки из первых измерений с длительностью интервала времени измерения, соответствующей оптимальной длительности измерения.
3. Передатчик электроэнергии по п.1 или 2, в котором первые измерения являются измерениями тока индуктора, и
измерительный блок (311) дополнительно выполнен с возможностью - для циклов опорного сигнала - проведения вторых измерений напряжения индуктора, причем каждое второе измерение происходит в интервале времени вторых измерений, представляющем собой подмножество периода цикла опорного сигнала, и имеет второй временной сдвиг относительно опорного сигнала,
адаптер (313) выполнен с возможностью изменения второго временного сдвига для определения второго оптимального сдвига тактирования измерений, который приводит ко второй максимальной глубине демодуляции для глубины демодуляции, отражающей меру разности для вторых измерений при разных нагрузках модуляции индуцированного сигнала несущей, и
демодулятор (309) выполнен с возможностью демодулировать модуляцию нагрузки из вторых измерений со вторым временным сдвигом, заданным равным второму оптимальному сдвигу тактирования измерений.
4. Передатчик электроэнергии по п. 1 или 2, в котором измерительный блок (311) выполнен с возможностью генерирования первых измерений тока индуктора и напряжения индуктора с разными временными сдвигами относительно опорного сигнала, а демодулятор выполнен с возможностью демодулировать модуляцию нагрузки из измерений как тока индуктора, так и напряжения индуктора.
5. Передатчик электроэнергии по п.1, в котором опорный сигнал представляет собой одно из сигнала напряжения возбуждения и сигнала возбуждения для переключающей схемы, генерирующей сигнал напряжения возбуждения.
6. Передатчик электроэнергии по п.1, в котором индуцированный сигнал несущей является сигналом передачи электроэнергии.
7. Передатчик электроэнергии по п.6, дополнительно содержащий адаптер (307) передачи электроэнергии, выполненный с возможностью выбора частоты сигнала передачи электроэнергии на основе свойства передачи электроэнергии.
8. Передатчик электроэнергии по п. 7, в котором адаптер (307) передачи электроэнергии выполнен с возможностью изменения частоты сигнала передачи электроэнергии в ответ на сообщения об управлении электроэнергией, получаемые от приемника (105) электроэнергии.
9. Передатчик электроэнергии по п.1 или 8, в котором адаптер (307) передачи электроэнергии выполнен с возможностью инициирования определения оптимального сдвига тактирования измерений в ответ на изменение частоты индуцированного сигнала несущей.
10. Передатчик электроэнергии по п.1, в котором измерительный блок (311) выполнен с возможностью проведения для каждого первого измерения - в пределах того же цикла опорного сигнала - второго измерения, по меньшей мере, одного из тока индуктора и напряжения индуктора, причем второе измерение происходит в интервалах времени измерения, имеющих тактирование, соответствующее интервалам времени измерения для первых измерений, но с временным сдвигом на половину сдвига периода цикла относительно интервалов времени измерения для первых измерений, и демодулятор (309) выполнен с возможностью демодулировать модуляцию нагрузки как из первых измерений, так и из вторых измерений.
11. Передатчик электроэнергии по п.1, в котором первые измерения являются измерениями тока индуктора в индукторе (103) передатчика.
12. Передатчик электроэнергии по п.1, в котором адаптер (313) выполнен с возможностью инициирования определения оптимального сдвига тактирования измерений в ответ на обнаружение изменения нагрузки индуцированного сигнала несущей.
13. Передатчик электроэнергии по п.1, в котором адаптер (313) выполнен с возможностью инициирования определения оптимального сдвига тактирования измерений в ответ на обнаружение изменения взаимодействия между передатчиком (101) электроэнергии и приемником (105) электроэнергии.
14. Способ эксплуатации передатчика электроэнергии, выполненного с возможностью передачи электроэнергии приемнику (105) электроэнергии с использованием беспроводной индукционной передачи электроэнергии, заключающийся в том, что:
генерируют посредством индуктора (103) передатчика индуцированный сигнал несущей для модуляции нагрузки в ответ на сигнал возбуждения напряжения, подаваемый, по меньшей мере, на одно из индуктора (103) передатчика и резонансного контура (303), содержащего индуктор (103) передатчика;
для циклов опорного сигнала, синхронизируемого с сигналом напряжения возбуждения, проводят первые измерения, по меньшей мере, одного из тока индуктора и напряжения индуктора для индуктора (103) передатчика, причем каждое первое измерение проводят на протяжении интервала времени измерения, который представляет собой подмножество периода цикла опорного сигнала и имеет первый временной сдвиг относительно опорного сигнала;
изменяют первый временной сдвиг и обнаруживают оптимальный сдвиг тактирования измерений как временной сдвиг для изменяющегося первого временного сдвига, который приводит к максимальной глубине демодуляции для глубины демодуляции, отражающей меру разности для первых измерений, генерируемых с первым временным сдвигом при разных нагрузках модуляции индуцированного сигнала несущей;
демодулируют модуляцию нагрузки индуцированного сигнала несущей из первых измерений с первым временным сдвигом, заданным равным оптимальному сдвигу тактирования измерении;
при этом выполнение первых измерений содержит выполнение изменений для различных значений изменяемого первого временного сдвига и определение глубины демодуляции для различных значений первого временного сдвига, отличающийся тем, что способ дополнительно содержит установление оптимального сдвига тактирования измерении равным значению для первого временного сдвига, для которого обнаружена наибольшая глубина демодуляции.
| US 2013154387 A1, 20.06.2013 | |||
| WO 2013046104 A1, 04.04.2013 | |||
| БЕСПРОВОДНОЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИЕМНИК И СИСТЕМА БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ | 2011 |
|
RU2481689C1 |

