ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к работе системы для беспроводной передачи мощности и, в частности, но без исключения, к обнаружению постороннего объекта в системе для беспроводной передачи мощности.
УРОВЕНЬ ТЕХНИКИ
Для питания большинства современных электротехнических изделий от внешнего источника питания необходимо обеспечить специально разработанный электрический контакт. Однако это, как правило, непрактично и предполагает физическое присоединение пользователем соединителей или обеспечение физического электрического контакта иным образом. Как правило, требования по питанию также значительно различаются, и в настоящее время большинство устройств имеют собственный специально разработанный источник питания, в результате чего обычный пользователь имеет большое количество различных источников питания, каждый из которых предназначен для определенного устройства. Хотя использование внутренних батарей может позволить избежать необходимости в проводном подключении к источнику питания в течение использования, это является лишь частичным решением, поскольку батареи необходимо подзаряжать (или заменять). Использование батарей также может привести к существенному увеличению массы и потенциальному увеличению стоимости и размера устройств.
Чтобы обеспечить пользователю значительно лучшее удобство использования, было предложено использовать беспроводной источник питания, в котором мощность индуктивно передается от индуктивности передатчика в устройстве передатчика мощности к катушке приемника в отдельных устройствах.
Передача мощности посредством магнитной индукции - это хорошо известная концепция, в основном применяемая в трансформаторах, имеющих полную индуктивную связь по магнитному потоку между первичной индуктивностью/катушкой передатчика и вторичной катушкой приемника. При разделении первичной катушки передатчика и вторичной катушки приемника между двумя устройствами становится возможной беспроводная передача мощности между ними на основе принципа слабосвязанного трансформатора.
Такая конструкция позволяет осуществлять беспроводную передачу мощности на устройство без необходимости выполнения каких-либо проводных или физических электрических соединений. Фактически, это может позволить разместить устройство рядом с катушкой передатчика или поверх нее для внешней подзарядки или обеспечения питания. Например, устройства передатчика мощности могут быть размещены вблизи горизонтальной поверхности, на которую устройство может быть просто помещено для обеспечения его питания.
Кроме того, такие конструкции для беспроводной передачи мощности предпочтительно могут быть спроектированы таким образом, чтобы устройство передатчика мощности можно было использовать с множеством устройств приемника мощности. В частности, был предложен подход к беспроводной передаче мощности, известный как спецификации Qi (Qi Specifications), который в настоящее время продолжает развиваться. Такой подход позволяет использовать устройства передатчика мощности, отвечающие спецификациям Qi, с устройствами приемников мощности, которые также соответствуют спецификациям Qi, причем они не обязательно должны быть изготовлены одним производителем или специально изготовлены друг для друга. Стандарт Qi дополнительно включает некоторые функциональные возможности, позволяющие адаптировать работу для конкретного устройства приемника мощности (например, в зависимости от конкретной потребляемой мощности).
Спецификация Qi разработана Консорциумом беспроводной передачи мощности (Wireless Power Consortium) и дополнительная информация имеется, например, на его веб-сайте: http://www.wirelesspowerconsortium.com/index.html, где, в частности, можно найти определяющие документы указанной спецификации.
В системах передачи мощности, таких как Qi, электромагнитное поле, созданное для передачи требуемых уровней мощности на приемник мощности, часто бывает очень значительным. Присутствие такого сильного поля во многих ситуациях может влиять на окружающую среду.
Например, потенциальная проблема беспроводной передачи мощности заключается в том, что может происходить непреднамеренная передача мощности, например, на металлические объекты, оказавшиеся поблизости от передатчика мощности. Например, если посторонний объект, такой как, например монета, ключ, кольцо и т.д., поместить на платформу передатчика мощности, выполненную с возможностью приема мощности с помощью приемника, магнитный поток, генерируемый катушкой передатчика, будет создавать в металлических объектах вихревые токи, приводящие к нагреву этих объектов. Повышение температуры может быть очень значительным и крайне нежелательным.
Чтобы снизить риск возникновения подобных ситуаций, было предложено ввести обнаружение постороннего объекта, при котором передатчик мощности способен обнаруживать присутствие постороннего объекта и снижать мощность передачи и/или генерировать предупреждение для пользователя, когда происходит положительное обнаружение. Например, система Qi включает функциональные возможности по обнаружению постороннего объекта и снижению мощности при обнаружении постороннего объекта. В частности, в разделе 11 спецификации Qi версии 1.2.1 описаны различные способы обнаружения постороннего объекта.
Один способ обнаружения таких посторонних объектов раскрыт в WO 2015018868 A1. В другом примере, представленном в WO 2012127335, раскрыт подход, основанный на определении неизвестных потерь мощности. Согласно этому подходу и приемник мощности, и передатчик мощности измеряют свою мощность, причем приемник передает данные об измеренной принятой мощности на передатчик мощности. Когда передатчик мощности обнаруживает значительную разницу между мощностью, переданной передатчиком, и мощностью, принятой приемником, потенциально может присутствовать нежелательный посторонний объект и из соображений безопасности передача мощности может быть уменьшена или прекращена. Для этого способа определения потери мощности требуются синхронизированные точные измерения мощности, выполняемые передатчиком и приемником мощности.
Например, согласно стандарту передачи мощности Qi приемник мощности оценивает принятую им мощность, например путем измерения выпрямленного напряжения и тока, их умножения и добавления оценки внутренних потерь мощности в приемнике мощности (например, потерь выпрямителя, катушки приемника, металлических деталей, являющихся частью приемника, и т.д.). Приемник мощности передает данные об определенной принятой мощности на передатчик мощности с минимальной частотой, например, каждые четыре секунды.
Передатчик мощности оценивает переданную им мощность, например, путем измерения входного напряжения постоянного тока и тока инвертора, их умножения и корректировки результата путем вычитания оценки внутренних потерь мощности в передатчике, таких как, например, расчетные потери мощности в инверторе, первичной катушке и металлических деталях, являющихся частью передатчика мощности.
Передатчик мощности может оценить потерю мощности путем вычитания сообщенной принятой мощности из переданной мощности. Если разница превышает пороговое значение, передатчик предположит, что большое количество мощности рассеивается посторонним объектом, после чего он может прекратить передачу мощности (или отрегулировать рабочие параметры соответствующим образом, например, ограничить передачу мощности для того, чтобы она была ниже заданного уровня).
В качестве альтернативы было предложено измерять качество или коэффициент добротности резонансной схемы, образованной первичной и вторичной катушками вместе с соответствующими емкостями и сопротивлениями. Уменьшение измеренного коэффициента добротности может указывать на присутствие постороннего объекта.
На практике, как правило, трудно достичь достаточной точности определения с помощью способов, описанных в спецификации Qi. Эта сложность усугубляется множеством неопределенностей, касающихся конкретных текущих рабочих условий.
Например, особой проблемой является потенциальное присутствие собственных металлов (т.е. металлических деталей устройства, которые вмещают приемник мощности или передатчик мощности), поскольку их магнитные и электрические свойства могут быть неизвестными (и отличаться для разных устройств) и, таким образом, их может быть трудно компенсировать.
Кроме того, нежелательный нагрев может быть результатом рассеивания даже относительно небольшой мощности металлическим посторонним объектом. Таким образом, необходимо обнаруживать даже небольшое расхождение в мощности между переданной и принятой мощностью, и это может быть особенно сложным, когда уровни мощности при передаче мощности увеличиваются.
Подход с ухудшением коэффициента добротности во многих случаях может характеризоваться лучшей чувствительностью для обнаружения присутствия металлических объектов. Однако он все же может не обеспечить достаточную точность и, например, также может быть подвержен влиянию собственного металла.
Эффективность обнаружения посторонних объектов зависит от конкретных рабочих условий при фактическом выполнении проверки. Например, если, как описано в спецификации Qi, измерение для обнаружения постороннего объекта выполняют в течение этапа выбора процесса инициализации передачи мощности, сигнал, который передатчик мощности предоставляет для измерения, должен быть достаточно слабым, чтобы не допустить активацию приемника мощности. Однако для такого слабого сигнала отношение сигнал/шум обычно низкое, что приводит к снижению точности измерения.
Требование слабого измерительного сигнала может привести к другим нежелательным эффектам. В приемнике мощности, подверженному воздействию слабого измерительного сигнала, может возникать ток утечки, который зависит от уровня измерительного сигнала, связи между первичной и вторичной катушками, а также состояния заряда конденсатора на выходе выпрямителя. Таким образом, этот ток утечки может быть различным в зависимости от реальных условий. Поскольку ток утечки влияет на вносимое полное сопротивление в катушке передатчика мощности, измерение коэффициента добротности также будет зависеть от конкретных текущих условий.
Еще одна проблема заключается в том, что обнаружение посторонних объектов обычно является очень чувствительной проверкой, при которой желательно, чтобы относительно небольшие изменения, вызванные присутствием постороннего объекта, обнаруживались в среде с по возможности большим разбросом рабочих условий и случаев, для которых выполняют проверку.
Соответственно, существующие последовательности операций, как правило, не оптимальны и могут в некоторых случаях и примерах обеспечивать характеристики хуже оптимальных. В частности, это может привести к тому, что присутствие посторонних объектов не будет обнаружено, или может привести к ложному обнаружению посторонних объектов, когда они отсутствуют.
Точное обнаружение посторонних объектов особенно затруднено в случаях, когда уровень мощности сигнала передачи мощности является высоким и/или когда он изменяется. Таким образом, обнаружение посторонних объектов особенно сложно в течение этапа передачи мощности, в частности, для приемников мощности, которые представляют собой большую и изменяющуюся нагрузку. Кроме того, как правило, имеются конфликтующие требования в отношении обнаружения посторонних объектов и передачи мощности, и действительно, передача мощности, как правило, создает помеху для обнаружения постороннего объекта. Однако модификация операции передачи мощности для улучшения обнаружения постороннего объекта, как правило, оказывает негативное влияние на передачу мощности.
Кроме того, другие операции системы передачи мощности могут быть чувствительными к таким эффектам. Например, во многих случаях на связь между передатчиком мощности и приемником мощности могут отрицательно влиять большие нагрузки и, в частности, большие изменения нагрузки.
Во многих системах при осуществлении связи от приемника мощности к передатчику мощности может быть использована модуляция нагрузкой, при которой нагрузка для сигнала передачи мощности изменяется в зависимости отданных, подлежащих передаче. Однако такую модуляцию нагрузкой может быть сложно определить при одновременном изменении нагрузки передачи мощности для сигнала передачи мощности. Аналогичным образом, связь от передатчика мощности к приемнику мощности может быть обеспечена путем модуляции сигнала передачи мощности (например, амплитудной или частотной модуляции), но помеха для такой модуляции может быть вызвана изменениями параметров сигнала передачи мощности из-за изменяющейся нагрузки.
Фактически, даже если для связи используют полностью отдельную несущую, такую как канал ближней бесконтактной связи (NFC), очень большое и изменяющееся электромагнитное поле, создаваемое сигналом передачи мощности, может вызвать значительные помехи, несмотря на то, что оно находится в совершенно другом частотном диапазоне.
Таким образом, присутствие сигнала передачи мощности и его нагрузка могут оказывать негативное влияние на другие операции, такие как операции обнаружения посторонних объектов и осуществления связи.
Следовательно, было бы предпочтительным улучшение работы системы передачи мощности, в частности, было бы предпочтительным применение подхода, позволяющего повысить гибкость, снизить стоимость, уменьшить сложность, улучшить обнаружение постороннего объекта, улучшить связь, улучшить поддержку различных нагрузок, улучшить адаптируемость, обратную совместимость, снизить влияние на операцию передачи мощности, улучшить операцию передачи мощности и/или улучшить характеристики.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Соответственно, настоящее изобретение предпочтительно направлено на уменьшение, смягчение или устранение одного или более из вышеупомянутых недостатков по отдельности или в любой комбинации.
Согласно аспекту настоящего изобретения предложен приемник мощности для приема мощности, переданной беспроводным образом, из сигнала передачи мощности от беспроводного передатчика мощности в течение этапа передачи мощности, причем для сигнала передачи мощности в течение этапа передачи мощности обеспечена возможность использования повторяющегося временного кадра, содержащего по меньшей мере временной интервал передачи мощности и временной интервал обнаружения посторонних объектов, при этом приемник мощности содержит: синхронизатор для синхронизации локальной временной привязки с повторяющимся временным кадром, контроллер нагрузки для отключения нагрузки в течение по меньшей мере части временных интервалов обнаружения посторонних объектов по меньшей мере в течение части этапа передачи мощности, при этом время отключения зависит от локальной временной привязки, контроллер режима для переключения между первым режимом работы и вторым режимом работы на протяжении временных интервалов передачи мощности в ответ на меру надежности синхронизации, причем в первом режиме работы и во втором режиме работы обеспечена возможность использования разных параметров передачи мощности.
Настоящее изобретение может обеспечить улучшенные характеристики во многих вариантах осуществления и может обеспечить в целом улучшенное выполнение операции передачи мощности во многих системах и вариантах осуществления. Например, во многих вариантах осуществления улучшенное обнаружение постороннего объекта может быть достигнуто путем выполнения такого обнаружения в течение интервалов времени с особенно предпочтительными условиями для выполнения таких операций.
Этот подход может позволить во многих вариантах осуществления снизить сложность и может позволить во многих системах обеспечить высокую степень обратной совместимости. В частности, этот подход может быть особенно пригодным для улучшения обнаружения посторонних объектов и, возможно, осуществления связи в системах беспроводной передачи мощности Qi, например работы в соответствии со спецификациями Qi версии 1.2 или более ранней.
Во многих вариантах осуществления настоящее изобретение может обеспечить более надежную и/или безопасную работу. В частности, оно может смягчить и снизить риск состояний перенапряжения, которые происходят при отключении нагрузки. Например, уровень мощности в сигнале передачи мощности в течение временных интервалов передачи мощности может быть снижен, когда мера надежности указывает на то, что синхронизация не является надежной, тем самым снижая риск неприемлемого перенапряжения, возникающий в том случае, если отключение происходит в течение временного интервала передачи мощности.
Во многих вариантах осуществления продолжительность временного интервала обнаружения посторонних объектов составляет не более 5%, 10% или 20% продолжительности временного кадра. Во многих вариантах осуществления продолжительность временного(-ых) интервала(-ов) обнаружения посторонних объектов составляет не менее 70%, 80% или 90% продолжительности временного кадра.
В течение временного интервала обнаружения посторонних объектов уровень мощности в сигнале передачи мощности может быть снижен в соответствии с уменьшающимся уровнем мощности, передаваемой от передатчика мощности к приемнику мощности. В течение временного интервала обнаружения посторонних объектов уровень мощности, передаваемой от передатчика мощности к приемнику мощности, может быть снижен относительно уровня мощности, передаваемой от передатчика мощности к приемнику мощности в течение временного интервала передачи мощности. Уровень мощности и ссылки на мощность и уровень мощности можно, в частности, рассматривать как относящиеся к реальной мощности (I⋅U⋅cosϕ).
В первом и втором режимах работы могут использовать различные параметры передачи мощности посредством по меньшей мере одного из: применения другого предела для уровня сигнала передачи мощности в первом и втором режимах работы, использование другой нагрузки сигнала передачи мощности в первом и втором режимах работы и применение другого предела к частоте изменений уровней мощности сигнала передачи мощности в первом и втором режимах работы. Синхронизатор может быть выполнен с возможностью генерирования меры надежности синхронизации.
В соответствии с необязательным признаком настоящего изобретения синхронизатор выполнен с возможностью осуществления синхронизации локальной временной привязки с повторяющимся временным кадром при входе на этап передачи мощности, контроллер режима выполнен с возможностью управления приемником мощности для работы в первом режиме работы при входе на этап передачи мощности, а также с возможностью переключения приемника мощности на второй режим работы в ответ на обнаружение того, что мера надежности синхронизации превышает пороговое значение.
Это может обеспечивать улучшенную работу во многих вариантах осуществления, в том числе, как правило, более надежную и/или безопасную операцию передачи мощности и/или улучшенное обнаружение постороннего объекта. В частности, такой подход может обеспечить возможность улучшенного инициирования передачи мощности в ситуациях, когда приемник мощности намеревается извлечь большое количество мощности в течение этапа передачи мощности.
В соответствии с необязательным признаком настоящего изобретения приемник мощности дополнительно содержит контроллер уровня сигнала для передачи запросов уровня сигнала в отношении сигнала передачи мощности на передатчик мощности, при этом контроллер уровня сигнала выполнен с возможностью управления уровнем сигнала передачи мощности в течение интервалов передачи мощности для отличия от уровня сигнала передачи мощности в течение интервалов обнаружения посторонних объектов при нахождении в первом режиме работы, причем синхронизатор выполнен с возможностью синхронизации в ответ на вариации сигнала между временными интервалами передачи мощности и временными интервалами для посторонних объектов.
Это может обеспечить улучшенные характеристики во многих вариантах осуществления и может обеспечить надежную адаптацию и синхронизацию начального времени.
В соответствии с необязательным признаком настоящего изобретения синхронизатор выполнен с возможностью определения меры надежности синхронизации в ответ на продолжительность работы в первом режиме работы.
Это может обеспечить улучшенные характеристики во многих вариантах осуществления.
В соответствии с необязательным признаком настоящего изобретения приемник мощности дополнительно содержит инициатор, который выполнен с возможностью определения набора параметров для временных интервалов для посторонних объектов путем связи с передатчиком мощности перед входом на этап передачи мощности, при этом набор параметров содержит по меньшей мере одно из: а. продолжительности временных интервалов обнаружения посторонних объектов, b. интервала между временными интервалами для посторонних объектов и с. уровня сигнала для интервалов для посторонних объектов.
Это может обеспечить более надежную работу и, в частности, может обеспечить возможность адаптации работы к конкретным условиям.
В соответствии с необязательным признаком настоящего изобретения синхронизатор выполнен с возможностью осуществления синхронизации на основе указанного набора параметров.
Это может обеспечивать улучшенные характеристики и может обеспечить возможность преимущественной адаптации условий работы с определяемыми параметрами путем согласования и последующей регулировки посредством, например, автоматической синхронизации.
В соответствии с необязательным признаком настоящего изобретения синхронизатор выполнен с возможностью определения меры надежности в ответ на сравнение временного параметра для временных интервалов обнаружения посторонних объектов, определенного из локальной временной привязки, и соответствующего временного параметра из набора параметров.
Это может обеспечить особенно преимущественное определение меры надежности.
В соответствии с необязательным признаком настоящего изобретения приемник мощности выполнен с возможностью управления передатчиком мощности для ограничения уровня сигнала передачи мощности до уровня, который ниже во время первого режима работы, чем во время второго режима работы.
Это может обеспечить улучшенную и/или более надежную работу во многих вариантах осуществления и, в частности, может смягчить и/или снизить риск состояний перенапряжения.
В соответствии с необязательным признаком настоящего изобретения контроллер нагрузки выполнен с возможностью отключения нагрузки от сигнала передачи мощности в течение временных интервалов передачи мощности при нахождении в первом режиме работы, но не при нахождении во втором режиме работы.
Это может обеспечить улучшенную работу.
В соответствии с необязательным признаком настоящего изобретения приемник мощности дополнительно содержит контроллер уровня мощности для передачи запросов уровня мощности в отношении сигнала передачи мощности на передатчик мощности, при этом контроллер уровня мощности выполнен с возможностью ограничения частоты изменения уровней мощности в первом режиме работы до более низкого уровня, чем во втором режиме работы.
В соответствии с необязательным признаком настоящего изобретения синхронизатор выполнен с возможностью определения меры надежности синхронизации в ответ на сравнение уровней сигнала для сигнала передачи мощности в течение временных интервалов передачи мощности и временных интервалов для посторонних объектов.
Это может обеспечить особенно преимущественное определение меры надежности.
В соответствии с необязательным признаком настоящего изобретения контроллер режима выполнен с возможностью переключения приемника мощности со второго режима работы на первый режим работы в ответ на обнаружение того, что мера надежности синхронизации ниже порогового значения.
В соответствии с необязательным признаком настоящего изобретения контроллер нагрузки выполнен с возможностью повторного подключения нагрузки в течение временных интервалов обнаружения посторонних объектов в течение по меньшей мере части этапа передачи мощности, при этом время повторного подключения зависит от локальной временной привязки.
В соответствии с необязательным признаком настоящего изобретения приемник мощности дополнительно содержит ограничитель тока для ограничения тока на нагрузку при повторном подключении нагрузки.
Согласно аспекту настоящего изобретения предложен способ управления работой приемника мощности, принимающего мощность, переданную беспроводным образом, из сигнала передачи мощности от беспроводного передатчика мощности в течение этапа передачи мощности, причем для сигнала передачи мощности в течение этапа передачи мощности используют повторяющийся временной кадр, содержащий по меньшей мере временной интервал передачи мощности и временной интервал обнаружения посторонних объектов, способ включает следующие этапы: синхронизацию локальной временной привязки с повторяющимся временным кадром, отключение нагрузки в течение по меньшей мере части временных интервалов обнаружения посторонних объектов в течение части по меньшей мере этапа передачи мощности, при этом время отключения зависит от локальной временной привязки, и переключение между первым режимом работы и вторым режимом работы на протяжении временных интервалов передачи мощности в ответ на меру надежности синхронизации, причем в первом режиме работы и во втором режиме работы используют разные параметры передачи мощности.
Эти и другие аспекты, признаки и преимущества настоящего изобретения будут очевидны и разъяснены со ссылкой на вариант(ы) реализации, описанный(-е) ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления настоящего изобретения будут описаны исключительно в качестве примера со ссылкой на чертежи, на которых
На ФИГ. 1 представлен пример элементов системы передачи мощности в соответствии с некоторыми вариантами осуществления настоящего изобретения.
На ФИГ. 2 представлен пример элементов передатчика мощности в соответствии с некоторыми вариантами осуществления настоящего изобретения.
На ФИГ. 3 представлен пример элементов приемника мощности в соответствии с некоторыми вариантами осуществления настоящего изобретения.
На ФИГ. 4 представлен пример элементов выходного каскада передатчика мощности.
На ФИГ. 5 представлен пример элементов приемника мощности в соответствии с некоторыми вариантами осуществления настоящего изобретения.
На ФИГ. 6 представлен пример временного кадра для системы беспроводной передачи мощности, изображенной на ФИГ. 1; и
На ФИГ. 7 представлен пример временного кадра для системы беспроводной передачи мощности в соответствии с некоторыми вариантами осуществления настоящего изобретения.
На ФИГ. 8 представлен пример элементов приемника мощности в соответствии с некоторыми вариантами осуществления настоящего изобретения.
На ФИГ. 9 представлен пример элементов приемника мощности в соответствии с некоторыми вариантами осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В нижеследующем описании основное внимание уделяется вариантам осуществления настоящего изобретения, которые могут быть применены в системе беспроводной передачи мощности и которые предполагают использование подхода к передаче мощности, например известного из спецификации Qi. Однако следует понимать, что настоящее изобретение не ограничивается этим вариантом применения, а может быть применено во многих других системах беспроводной передачи мощности.
На ФИГ. 1 представлен пример системы передачи мощности в соответствии с некоторыми вариантами осуществления настоящего изобретения. Система передачи мощности содержит передатчик 101 мощности, который содержит катушку/индуктивность 103 передатчика (или соединен с ней). Система также содержит приемник 105 мощности, который содержит катушку/индуктивность 107 приемника (или соединен с ней).
Система обеспечивает электромагнитный сигнал передачи мощности, который позволяет индуктивно передавать мощность от передатчика 101 мощности к приемнику 105 мощности. В частности, передатчик 101 мощности генерирует электромагнитный сигнал, который распространяется в виде магнитного потока катушкой или индуктивностью 103 передатчика. Сигнал передачи мощности может соответствовать компоненту для передачи электромагнитной мощности, осуществляющему передачу энергии от передатчика мощности к приемнику мощности, и может рассматриваться как соответствующий компоненту генерируемого электромагнитного поля, которое передает мощность от передатчика мощности к приемнику мощности. Например, при отсутствии нагрузки приемной катушки 107 приемник мощности не будет получать мощность из сгенерированного электромагнитного поля (не считая потерь). В таком случае при возбуждении катушки 103 передатчика может быть сгенерировано электромагнитное поле с потенциально высокой напряженностью поля, но уровень мощности сигнала передачи мощности будет нулевым (не считая потерь). В некоторых ситуациях, если присутствует посторонний объект, сигнал передачи мощности можно рассматривать как включающий компонент, соответствующий передаче мощности постороннему объекту, и, таким образом, сигнал передачи мощности можно рассматривать как соответствующий мощности, получаемой из электромагнитного поля, создаваемого передатчиком мощности.
Сигнал передачи мощности, как правило, может иметь частоту от приблизительно 20 кГц до приблизительно 500 кГц и часто для Qi-совместимых систем, как правило, в диапазоне от 95 кГц до 205 кГц (или, например, для вариантов применения на кухне с высокой мощностью частота может, например, как правило, находиться в диапазоне от 20 кГц до 80 кГц). Катушка 103 передатчика и катушка 107 приема мощности слабо связаны, и, таким образом, катушка 107 приема мощности принимает сигнал (по меньшей мере часть сигнала) передачи мощности от передатчика 101 мощности. Таким образом, мощность передается от передатчика 101 мощности к приемнику 105 мощности с помощью беспроводной индуктивной связи от катушки 103 передатчика к катушке 107 приема мощности. Термин «сигнал передачи мощности» в основном используется для обозначения индуктивного сигнала/магнитного поля между катушкой 103 передатчика и катушкой 107 приема мощности (сигнала магнитного потока), но следует понимать, что эквивалентно он также может рассматриваться и использоваться, как обозначающий электрический сигнал, обеспечиваемый на катушке 103 передатчика или принимаемый катушкой 107 приема мощности.
В этом примере приемник 105 мощности, в частности, является приемником мощности, который принимает мощность с помощью катушки 107 приемника. Однако в других вариантах осуществления приемник 105 мощности может содержать металлический элемент, такой как металлический нагревательный элемент, и в этом случае сигнал передачи мощности непосредственно индуцирует вихревые токи, приводящие к непосредственному нагреву элемента.
Система выполнена с возможностью передачи значительных уровней мощности и, в частности, передатчик мощности может обеспечивать уровни мощности, превышающие 500 мВт, 1 Вт, 5 Вт, 50 Вт, 100 Вт или 500 Вт, во многих вариантах осуществления. Например, для вариантов применения, соответствующих Qi, передача мощности, как правило, может происходить в диапазоне мощности 1-5 Вт для вариантов применения с малой мощностью (базовым профилем мощности), до 15 Вт для спецификации Qi версии 1.2, в диапазоне до 100 Вт для вариантов применения с более высокой мощностью, таких как электроинструменты, ноутбуки, дроны, роботы и т.д., и от 100 до 1000 Вт для вариантов применения с очень большой мощностью, таких как, например, варианты применения на кухне.
Далее работа передатчика 101 мощности и приемника 105 мощности будет описана с прямой ссылкой на вариант осуществления, в целом соответствующий спецификации Qi (за исключением описанных в данном документе (или последующих) изменений и улучшений) или подходящий для спецификации для кухни с повышенной мощностью, разрабатываемой Консорциумом беспроводной передачи мощности. В частности, передатчик 101 мощности и приемник 105 мощности могут поддерживать или по существу быть совместимыми с элементами спецификации Qi версии 1.0, 1.1 или 1.2 (за исключением описанных в данном документе (или последующих) изменений и улучшений).
Далее работа системы по ФИГ. 1 будет описана с особым упором на обнаружение посторонних объектов.
В системах беспроводной передачи мощности присутствие объекта (как правило, проводящего элемента, получающего мощность из сигнала передачи мощности и не являющегося частью передатчика 101 мощности или приемника 105 мощности, т.е. являющегося непреднамеренным, нежелательным и/или создающим помехи элементом в отношении передачи мощности) может быть очень нежелательным в течение передачи мощности. Такой нежелательный объект также известен как посторонний объект.
Посторонний объект может не только снижать эффективность вследствие добавления в операцию потерь мощности, но также может ухудшать саму операцию передачи мощности (например, за счет влияния на эффективность передачи мощности или получения мощности, не управляемой непосредственно, например, с помощью контура передачи мощности). Кроме того, индукция токов в постороннем объекте (в частности, вихревых токов в металлической части постороннего объекта) может зачастую приводить к крайне нежелательному нагреву постороннего объекта.
Для решения подобной проблемы системы беспроводной передачи мощности, такие как Qi, включают функцию обнаружения посторонних объектов. В частности, передатчик мощности имеет функциональные возможности по обнаружению присутствия постороннего объекта. В случае его обнаружения передатчик мощности может, например, прекратить передачу мощности или уменьшить максимальную величину мощности, которая может быть передана.
Авторы выяснили, что обычное обнаружение посторонних объектов осуществляется не оптимально и что это частично связано с изменениями и неопределенностями конкретных рабочих условий и ситуаций, при которых выполняется обнаружение посторонних объектов, включая изменения и неопределенности свойств передатчика мощности, свойств приемника мощности, применяемых условий проверок и т.д.
Примером сложностей при проверках по обнаружению посторонних объектов является требование выполнения достаточно точных измерений для достижения достаточно надежного обнаружения посторонних объектов. Например, если измерение для обнаружения постороннего объекта происходит на этапе выбора этапа инициализации передачи мощности Qi, сигнал, который передатчик мощности обеспечивает для этого измерения, должен быть достаточно слабым, чтобы не активировать приемник мощности. Однако это, как правило, приводит к плохому отношению сигнал/шум, что снижает точность обнаружения. Таким образом, эффективность обнаружения может зависеть от конкретного применяемого уровня сигнала и, как правило, возникают противоречивые требования.
В приемнике мощности, на который воздействует слабый электромагнитный сигнал, может возникать ток утечки, который зависит от уровня электромагнитного сигнала, связи между первичной и вторичной катушками и состояния заряда конденсатора на выходе выпрямителя. Таким образом, этот ток утечки может варьироваться в зависимости от реальных текущих условий и в зависимости от конкретных параметров (например, свойств конденсатора) отдельного приемника мощности. Поскольку ток утечки влияет на вносимое полное сопротивление в первичной катушке, измерение коэффициента добротности также зависит от реальных условий и это, как правило, препятствует оптимальному обнаружению.
Еще одна проблема обнаружения постороннего объекта основана, например, на том, что сообщенные данные о принятой мощности при различных нагрузках или уровнях сигнала могут быть менее надежными, чем требуется, вследствие того, что соотношения между переданной и принятой мощностью различны для разных нагрузок и уровней сигналов.
В системе по ФИГ. 1 использован подход к обнаружению посторонних объектов, предполагающий уменьшение неопределенности и чувствительности к изменениям, и, соответственно, предполагающий обеспечение лучшего обнаружения посторонних объектов. Указанный подход во многих вариантах осуществления позволяет обеспечить лучшее обнаружение посторонних объектов и, в частности, во многих вариантах осуществления позволяет обеспечить более точное и/или надежное обнаружение посторонних объектов. Этот подход также может позволить обеспечить низкую сложность и низкие требования к ресурсам. Преимущество данного подхода состоит в том, что он может быть пригодным для применения во многих существующих системах, например, в частности, в системе беспроводной передачи мощности Qi, и фактически это часто может быть достигнуто путем выполнения незначительных изменений.
Как будет описано более подробно ниже, этот подход представляет собой подход с временным разделением в течение этапа передачи мощности, причем такие операции, как обнаружение посторонних объектов, а также передача мощности могут, например, выполняться в разных временных интервалах, что позволяет существенно снизить взаимные помехи между ними (в частности, влияние передачи мощности на обнаружение посторонних объектов).
В частности, для беспроводной системы передачи мощности сигнал передачи мощности должен соответствовать повторяющемуся временному кадру, который содержит по меньшей мере один временной интервал передачи мощности и один временной интервал обнаружения посторонних объектов.
Передатчик мощности выполнен с возможностью осуществления обнаружения постороннего объекта в течение временных интервалов обнаружения посторонних объектов и для упрощения этой операции, приемник мощности выполнен с возможностью отключения нагрузки, тем самым снижая нагрузку сигнала передачи мощности по сравнению с интервалами передачи мощности, при которых подключена нагрузка, которая нагружает сигнал передачи мощности.
В частности, многие подходы по обнаружению постороннего объекта становятся более точными, если мощность, принятая/извлеченная приемником мощности, снижена (или близка) до нуля путем отключения нагрузки. В этом состоянии, если мощность подается передатчиком мощности, то она, вероятно, будет поглощена посторонним объектом, находящимся вблизи передатчика мощности. Такая мощность, извлекаемая в постороннем объекте, может быть измерена и обнаружена с гораздо более высокой точностью, поскольку уровень мощности и неопределенность мощности, извлеченной приемником мощности, существенно снижаются и, как правило, будут снижены, например, до извлекаемой собственным металлом приемника мощности. Это не только повышает относительное воздействие постороннего объекта на сигнал передачи мощности, но также может обеспечивать более точную компенсацию мощности, извлекаемой приемником мощности (например, мощность, извлекаемая собственным металлом, может быть оценена в течение процесса калибровки и далее компенсирована в алгоритме обнаружения постороннего объекта).
Отключение нагрузки в течение временных интервалов обнаружения посторонних объектов приводит к снижению уровня мощности сигнала передачи мощности в течение временного интервала обнаружения посторонних объектов относительно временного интервала передачи мощности, и, как правило, мощность, извлекаемая приемником мощности, может быть не менее чем в 5, 10 или 50 раз ниже уровня мощности в течение временного интервала передачи мощности.
Таким образом, передатчик мощности выполняет обнаружение постороннего объекта в течение временных интервалов обнаружения посторонних объектов, когда нагрузка сигнала передачи мощности со стороны приемника мощности значительно снижена. Кроме того, приемник мощности синхрониризуется с повторяемым временным кадром на сигнале передачи мощности и использует его для синхронизации отключения нагрузки таким образом, чтобы оно совпадало с временными интервалами обнаружения посторонних объектов. Как правило, нагрузка будет отключена вскоре после определенного начала временного интервала обнаружения посторонних объектов и будет повторно подключена вскоре перед его окончанием, тем самым обеспечивая небольшой запас безопасности. В результате работы передатчик мощности и приемника мощности, синхронизированной по временному кадру, выполняется улучшенное обнаружение посторонних объектов, при этом по-прежнему обеспечивая высокий уровень переданной мощности.
На ФИГ. 2 более подробно представлены элементы передатчика 101 мощности, а на ФИГ. 3 более подробно представлены элементы приемника 105 мощности по ФИГ. 1.
Передатчик 101 мощности содержит возбудитель 201, который выполнен с возможностью генерации сигнала возбуждения, подаваемого на катушку 103 передатчика, которая, в свою очередь, генерирует электромагнитное поле и, следовательно, электромагнитный сигнал передачи мощности, который обеспечивает передачу мощности на приемник 105 мощности. Сигнал передачи мощности обеспечивают (по меньшей мере) в течение временных интервалов передачи мощности этапа передачи мощности.
Возбудитель 201, как правило, может содержать выходную схему в виде инвертора, обычно образуемую путем возбуждения полного моста или полумоста, что хорошо известно специалистам в данной области техники. На ФИГ. 4 представлен пример типичного выходного каскада передатчика мощности, в котором инвертер образован четырьмя полевыми транзисторами (FET), соединенными в мостиковую конфигурацию, и катушкой 103 передатчика (LTx), которая также соединена с конденсатором (СТх) для образования выходной резонансной схемы.
Передатчик 101 мощности также содержит контроллер 203 передатчика мощности, который выполнен с возможностью управления работой передатчика 101 мощности в соответствии с требуемыми принципами работы. В частности, передатчик 101 мощности может иметь многие функциональные возможности, необходимые для выполнения управления мощностью в соответствии со спецификациями Qi.
Контроллер 203 передатчика мощности, в частности, выполнен с возможностью управления генерацией сигнала возбуждения возбудителем 201, и он выполнен с возможностью, в частности, управления уровнем мощности сигнала возбуждения, и, соответственно, уровнем генерируемого сигнала передачи мощности/электромагнитного поля. Контроллер 203 передатчика мощности содержит контроллер контура мощности, управляющий уровнем мощности сигнала передачи мощности в ответ на сообщения для управления мощностью, принятые от приемника 105 мощности в течение этапа управления мощностью.
Для приема данных и сообщений от приемника 105 мощности передатчик 101 мощности содержит первое устройство 205 связи, которое выполнено с возможностью приема данных и сообщений от приемника 105 мощности (как будет очевидно для специалиста в данной области техники, сообщение с данными может содержать один или более битов информации). В этом примере приемник 105 мощности выполнен с возможностью модуляции нагрузкой сигнала передачи мощности, сгенерированного катушкой 103 передатчика, а первое устройство 205 связи выполнено с возможностью определения изменения напряжения и/или тока на катушке 103 передатчика и демодулирования модуляции нагрузкой на их основе. Специалистам в данной области техники известны принципы модуляции нагрузкой, например используемые в системах беспроводной передачи мощности Qi, поэтому они не будут описаны более подробно.
Во многих вариантах осуществления первое устройство 205 связи также выполнено с возможностью передачи данных на приемник 105 мощности и может, в частности, быть выполнено с возможностью модуляции сигнала передачи мощности с использованием частотной, амплитудной или фазовой модуляции.
В некоторых вариантах осуществления связь могут осуществлять с использованием отдельного канала связи, что может быть достигнуто с использованием отдельной катушки связи или фактически с использованием катушки 103 передатчика. Например, в некоторых вариантах осуществления может быть реализована ближняя бесконтактная связь или высокочастотная несущая (например, с частотой несущей 13,56 МГц) может быть наложена на сигнал передачи мощности.
В системе по ФИГ. 1-3 связь в течение этапа передачи мощности осуществляется во временных интервалах обнаружения посторонних объектов. В частности, некоторые или по существу все временные интервалы обнаружения посторонних объектов также могут быть использованы, как временные интервалы осуществления связи, в течение которых происходит осуществление связи между передатчиком 101 мощности и приемником 105 мощности. В частности, контроллер 203 передатчика может синхронизировать первое устройство 205 связи таким образом, что операция осуществления связи (обычно как прием, так и передача данных) выполняется во (и, как правило, только в) временных интервалах обнаружения посторонних объектов/временных интервалах осуществления связи на этапе передачи мощности, т.е. в течение временных интервалов обнаружения посторонних объектов, которые назначены для осуществления связи.
Это может позволить существенно повысить качество связи.
Передатчик 101 мощности также содержит детектор 207 посторонних объектов, который выполнен с возможностью выполнения проверок по обнаружению посторонних объектов, т.е. конкретного определения того, насколько вероятно присутствие каких-либо нежелательных проводящих элементов в пределах сгенерированного электромагнитного поля.
В данной системе проверки по обнаружению посторонних объектов основаны на измерениях, выполняемых в течение временных интервалов обнаружения посторонних объектов, т.е. в течение временных интервалов обнаружения посторонних объектов, которые предназначены для обнаружения посторонних объектов.
Как будет описано далее более подробно, в течение временных интервалов обнаружения посторонних объектов уровень мощности сигнала передачи мощности снижается за счет отключения нагрузки приемником мощности и уменьшения общей нагрузки для сигнала передачи мощности. Отключение нагрузки соответствует отсоединению нагрузки от сигнала передачи мощности (и, следовательно, термины «отключение» и «отсоединение» нагрузки от сигнала передачи мощности могут считаться синонимами). Нагрузка будет соответствующим образом отключена/отсоединена от сигнала передачи мощности и от катушки 107 приемника.
Во многих вариантах осуществления приемник 105 мощности может быть выполнен с возможностью минимизации нагрузки для сигнала передачи мощности, чтобы она соответствовала только нагрузке от собственного металла (металлических деталей самого приемника мощности), и, возможно, небольшому количеству мощности, используемому функциональным блоком управления приемника мощности. Приемник мощности часто может полностью отключать целевую нагрузку для сигнала передачи мощности в течение временных интервалов обнаружения посторонних объектов. Это часто может, например, приводить к уменьшению нагрузки для сигнала передачи мощности, например, от 5-50 Вт в течение временных интервалов передачи мощности до менее 500 мВт в течение временных интервалов обнаружения посторонних объектов.
Следует отметить, что уровень мощности сигнала передачи мощности может быть снижен без того, чтобы это приводило к снижению напряженности сгенерированного электромагнитного поля (или было вызвано им). Например, отключение нагрузки приемником мощности приведет к уменьшению мощности, получаемой из электромагнитного поля и сигнала передачи мощности и, таким образом, из сигнала возбуждения на катушку 103 передатчика. Однако это не обязательно должно приводить к уменьшению напряженности сгенерированного поля и фактически может обеспечить наличие большой напряженности поля, поскольку противоположное электромагнитное поле, созданное током в катушке 107 приемника, уменьшается.
Таким образом, во многих вариантах осуществления временные интервалы обнаружения посторонних объектов характеризуются передачей пониженной мощности от передатчика мощности к приемнику мощности по сравнению с такой передачей мощности в течение временных интервалов передачи мощности (или по меньшей мере передачей сниженной максимально возможной/доступной мощности от передатчика мощности на приемник мощности по сравнению с передачей максимально возможной/доступной мощности в течение временных интервалов передачи мощности). Однако напряженность электромагнитного поля, создаваемого катушкой 103 передатчика, может оставаться такой же или даже увеличиваться.
Фактически, во многих вариантах осуществления, в которых обнаружение посторонних объектов основано на измерении нагрузки электромагнитного поля, создаваемого катушкой 103 передатчика, может быть желательным адаптировать сигнал возбуждения таким образом, чтобы создаваемое электромагнитное поле имело напряженность поля, подходящую для выполнения предполагаемой операции в течение временного интервала обнаружения посторонних объектов. Это может быть даже более высокая напряженность поля, чем в течение временного интервала передачи мощности, но величина передаваемой мощности уменьшается вследствие того, что приемник мощности отключает нагрузку. Однако во многих вариантах осуществления желательно, чтобы напряженность поля не была слишком высокой, когда приемник отключает нагрузку (для смягчения состояний перенагрузки).
Уменьшение нагрузки позволяет намного точнее обнаруживать посторонние объекты во многих ситуациях. Это приведет к тому, что мощность, рассеиваемая в постороннем объекте, будет составлять гораздо большую долю в общей рассеиваемой мощности, и фактически, как правило, мощность, рассеиваемая в постороннем объекте, превышает мощность, рассеиваемую в приемнике мощности, что, таким образом, облегчает обнаружение рассеивания мощности этим посторонним объектом.
В подходе по ФИГ. 2 возбудитель 201 генерирует электромагнитный проверочный сигнал, возбуждая катушку передатчика и, следовательно, электромагнитный проверочный сигнал может считаться соответствующим сигналу передачи мощности в течение временных интервалов обнаружения посторонних объектов. Однако следует понимать, что в некоторых вариантах осуществления электромагнитный проверочный сигнал может быть сгенерирован не катушкой 103 передатчика, а другой катушкой (например, специальной проверочной катушкой). Далее термин «сигнал передачи мощности» будет использоваться для ссылки на сигнал электромагнитного поля, генерируемый передатчиком мощности в течение временных интервалов передачи мощности и в течение временных интервалов обнаружения посторонних объектов.
В течение интервала, в котором выполняется обнаружение посторонних объектов, т.е. в течение временного интервала обнаружения посторонних объектов, детектор 207 посторонних объектов может оценивать условия, чтобы определить, можно ли считать, что посторонний объект присутствует, или нет. В течение временного интервала обнаружения посторонних объектов передатчик 101 мощности генерирует электромагнитный проверочный сигнал, а обнаружение посторонних объектов основано на оценке характеристик и свойств этого сигнала.
Например, уровень мощности (мощности, полученной из) сгенерированного сигнала передачи мощности может быть использован как показатель мощности, полученной потенциальными посторонними объектами (как правило, путем ее сравнения с данными об ожидаемой мощности, полученными от приемника 105 мощности). Уровень мощности сигнала передачи мощности соответствует мощности, полученной из сгенерированного электромагнитного поля проводящими элементами (включая катушку 107 приемника), находящимися в электромагнитном поле. Таким образом, он указывает мощность, полученную комбинацией из приемника 105 мощности, а также любых посторонних объектов, которые могут присутствовать. Разность между уровнем мощности сигнала передачи мощности и мощностью, полученной приемником 105 мощности, соответственно, отражает мощность, полученную любыми присутствующими посторонними объектами. Обнаружение постороннего объекта может, например, представлять собой обнаружение низкой сложности, при котором обнаружение постороннего объекта считается произошедшим, если разность между уровнем мощности электромагнитного сигнала (далее именуемым уровнем мощности передачи) превышает сообщенную мощность, полученную приемником 105 мощности (далее именуемую уровнем принятой мощности).
Согласно этому подходу обнаружение посторонних объектов, соответственно, основано на сравнении уровней мощности между уровнем переданной мощности и сообщенным уровнем принятой мощности. Реакция на обнаружение постороннего объекта может быть разной в разных вариантах осуществления. Однако во многих вариантах осуществления передатчик 101 мощности может быть выполнен с возможностью прекращения передачи мощности (по меньшей мере временно) в ответ на обнаружение постороннего объекта. В других вариантах реализации он может быть выполнен с возможностью наложения пониженных пределов мощности на сигнал передачи мощности в течение временных интервалов передачи мощности, при этом обеспечивая возможность продолжения передачи мощности.
На ФИГ. 3 представлены некоторые приведенные в качестве примера элементы приемника 105 мощности.
Катушка 107 приемника соединена с контроллером 301 приемника мощности, который соединяет катушку 107 приемника с нагрузкой 303 через выключатель 305 (т.е. с коммутируемой нагрузкой 305). Контроллер 301 приемника мощности включает тракт управления мощностью, который преобразует мощность, полученную катушкой 107 приемника, в сигнал, пригодный для подачи на нагрузку. Кроме того, контроллер 301 приемника мощности может включать различные функциональные блоки контроллера приемника мощности, необходимые для выполнения передачи мощности, и, в частности, функциональные блоки, необходимые для выполнения передачи мощности в соответствии со спецификациями Qi.
Для осуществления связи приемника 105 мощности с передатчиком 101 мощности приемник 105 мощности имеет второе устройство 307 связи.
Второе устройство 307 связи выполнено с возможностью передачи данных на передатчик мощности при изменении нагрузки катушки 107 приемника в ответ на поступление данных, подлежащих передаче на передатчик 101 мощности. Затем изменения нагрузки обнаруживаются и демодулируются передатчиком 101 мощности способом, известным специалистам в данной области техники.
В этом примере второе устройство 307 связи также выполнено с возможностью демодуляции амплитудной, частотной и/или фазовой модуляции сигнала передачи мощности для получения данных, переданных с передатчика мощности.
Контроллер 301 приемника мощности также выполнен с возможностью управления вторым устройством 307 связи таким образом, чтобы связь на этапе передачи мощности осуществлялась в интервалах связи, т.е. в течение временных интервалов, в которых уровень мощности сигнала передачи мощности снижается.
Таким образом, аналогично тому, как первое устройство связи синхронизирует связь с приемником мощности, чтобы она была осуществлена в течение временных интервалов обнаружения посторонних объектов, второе устройство связи также синхронизирует связь с передатчиком мощности, чтобы она была осуществлена в течение временных интервалов обнаружения посторонних объектов.
На ФИГ. 5 представлена принципиальная схема элементов приведенного в качестве примера тракта мощности приемника 105 мощности. В этом примере приемник 105 мощности содержит катушку 107 приемника, обозначенную как LRX. В этом примере катушка 107 приемника представляет собой часть резонансной схемы, а приемник 105 мощности, соответственно, также содержит резонансный конденсатор CRX. Катушка 107 приемника подвержена воздействию электромагнитного сигнала/поля и, соответственно, в катушке индуцируется переменное напряжение/ток. Резонансная схема подключена к выпрямительному мосту со сглаживающим конденсатором С1, подключенным к выходу моста. Таким образом, на конденсаторе С1 генерируется постоянное напряжение. Величина пульсаций постоянного напряжения будет зависеть от размера сглаживающего конденсатора, а также от нагрузки.
Мост В1 и сглаживающий конденсатор С1 подключены к нагрузке 303, которая обозначена ссылочной позицией RL, через выключатель 305, который показан как выключатель S1. Выключатель 305, соответственно, может быть использован для подключения или отключения нагрузки от тракта мощности и, таким образом, нагрузка представляет собой коммутируемую нагрузку 305. Следует понимать, что, хотя выключатель S1 показан как обычный выключатель, он, конечно, может быть реализован с помощью любого подходящего средства, включая, как правило, полевой транзистор со структурой металл-оксид-полупроводник (MOSFET). Кроме того, следует понимать, что нагрузка 303 изображена как простой пассивный двухполюсный элемент, но, конечно, она может представлять собой любую пригодную нагрузку. Например, нагрузка 303 может представлять собой заряжаемую батарею, мобильный телефон или другое коммуникационное или вычислительное устройство, может представлять собой простую пассивную нагрузку и т.д. По существу, нагрузка 303 не обязательно должна быть внешней или специальной внутренней нагрузкой, а может, например, включать элементы самого приемника 105 мощности. Таким образом, нагрузку 303, показанную на ФИГ. 3 и 5, можно рассматривать как представляющую собой любую нагрузку катушки 107 приемника/ электромагнитного сигнала, которая может быть отключена с помощью выключателя 305/S1, и, соответственно, она также упоминается как коммутируемая нагрузка 305.
На ФИГ. 5 также показан конденсатор С2 модуляции нагрузки, который может быть отключен или подключен параллельно резонансной схеме в зависимости от положения выключателя S2. Второе устройство 307 связи может быть выполнено с возможностью управления выключателем S2 таким образом, чтобы нагрузка модулирующего конденсатора С2 могла быть подключена и отключена в ответ на поступление данных, подлежащих передаче на передатчик 101 мощности, таким образом обеспечивая модуляцию нагрузки.
Приемник 105 мощности выполнен с возможностью перехода в режим пониженной мощности в течение временного интервала(-ов) обнаружения посторонних объектов каждого временного кадра в течение этапа передачи мощности. В этом примере приемник 105 мощности содержит контроллер 309 нагрузки, который управляет выключателем 305 (эквивалентно выключатель 305 можно рассматривать как часть контроллера нагрузки). В течение временного интервала обнаружения посторонних объектов контроллер 309 нагрузки может отключать нагрузку 303 от приемника мощности, т.е. отключать нагрузку контроллера 301 приемника мощности и, таким образом, нагрузку катушки 107 приемника. Таким образом, в этом случае контроллер 309 нагрузки может уменьшить нагрузку катушки 107 приемника в течение временного интервала обнаружения посторонних объектов. Кроме того, не только уменьшается нагрузка приемника 105 мощности, что облегчает обнаружение других потерь мощности или модуляцию, но, что еще более важно, приемник 105 мощности входит в более хорошо выраженное или определенное состояние, в котором влияние изменений нагрузки на сигнал передачи мощности снижается.
В примере, изображенном на ФИГ. 5, выключатель S1 может использоваться для отключения нагрузки в течение временного интервала обнаружения посторонних объектов. Следует понимать, что в вариантах реализации выключаемая нагрузка 303 требует подачи более постоянной мощности, выключатель S1 может быть расположен перед конденсатором С1, или после конденсатора S1 может быть предусмотрено другое хранилище энергии для подачи мощности на выключаемую нагрузку 303 в течение временного интервала обнаружения посторонних объектов.
Следует понимать, что нагрузка катушки 107 приемника не может быть полностью отключена в течение интервала обнаружения постороннего объекта. Например, приемник 105 мощности может по-прежнему получать мощность, например, для работы некоторых внутренних схем. Таким образом, контроллер 309 нагрузки может быть выполнен с возможностью отключения нагрузки от катушки 107 приемника, при этом катушка 107 приемника может быть нагружена одной или более другими нагрузками. Фактически, нагрузку катушки 107 приемника можно рассматривать как состоящую из нагрузки, отключаемой контроллером 309 нагрузки в течение интервала обнаружения посторонних объектов, и нагрузки, не отключаемой контроллером 309 нагрузки. Таким образом, нагрузку 303 можно рассматривать как представляющую собой нагрузку, отключаемую катушкой 107 приемника в течение интервала обнаружения посторонних объектов. Эта нагрузка может включать как внешнюю, так и внутреннюю нагрузку, для которой установлена передача мощности, но также может включать, например, внутренний функциональный блок управления, временно отключаемый в течение интервала обнаружения посторонних объектов.
Контроллер 301 приемника мощности выполнен с возможностью создания контура управления мощностью с передатчиком 101 мощности. В частности, контроллер 301 приемника мощности может передавать сообщения для управления мощностью на передатчик 101 мощности, а в ответ передатчик 101 мощности может изменять уровень мощности сигнала передачи мощности в течение временных интервалов передачи мощности. Как правило, контроллер 301 приемника мощности выполнен с возможностью генерации сообщений об ошибках управления мощностью, которые указывают на запрос для передатчика 101 мощности в отношении увеличения или уменьшения уровня мощности. Контроллер 301 приемника мощности выполнен с возможностью определения соответствующих сообщений об ошибках, сравнивая измеренное значение с опорным значением. В течение передачи мощности контроллер 301 приемника мощности может сравнивать предоставленный уровень мощности с требуемым уровнем мощности и на основании этого сравнения запрашивать повышение или понижение уровня мощности.
Как упоминалось ранее, в системе применяется повторяющийся временной кадр в течение этапа передачи мощности, причем временной кадр содержит по меньшей мере один временной интервал передачи мощности и один временной интервал обнаружения посторонних объектов. Пример такого повторяющегося временного кадра показан на ФИГ. 6, на которой временные интервалы передачи мощности обозначены как РТ, а временные интервалы обнаружения посторонних объектов обозначены как D. В этом примере каждый временной кадр FRM содержит только один временной интервал обнаружения посторонних объектов и один временной интервал передачи мощности. Однако следует понимать, что в других вариантах осуществления другие временные интервалы также могут быть включены во временной кадр, или множество временных интервалов обнаружения посторонних объектов и/или временных интервалов передачи мощности могут быть включены в каждый временной кадр. В частности, повторяющийся временной кадр может содержать временные интервалы обнаружения посторонних объектов различных типов, например один или более временных интервалов обнаружения посторонних объектов и один или более временных интервалов осуществления связи.
Согласно этому подходу, обнаружение посторонних объектов (и, например, такие операции, как осуществление связи) может выполняться в течение временных интервалов обнаружения посторонних объектов и, таким образом, обнаружение посторонних объектов (и, например, осуществление связи) и передача мощности могут быть разделены во временной области, что позволяет уменьшить перекрестные помехи от передачи мощности для обнаружения посторонних объектов/осуществления связи. Таким образом, изменчивость и неопределенность, возникающие в результате изменений рабочих условий для передачи мощности, могут отсутствовать при обнаружении посторонних объектов (осуществлении связи), что позволяет достичь более надежного и точного обнаружения посторонних объектов (осуществления связи).
Таким образом, на этапе передачи мощности передатчик мощности выполнен с возможностью выполнения передачи мощности в течение временного интервала передачи мощности временных кадров этапа передачи мощности. В частности, в течение этих временных интервалов передатчик мощности и приемник мощности могут управлять контуром управления мощностью (работа контура управления мощностью может быть основана на осуществлении связи в пределах временных интервалов осуществления связи, соответствующих повторяющимся временным интервалам). Таким образом, уровень передаваемой мощности может динамически изменяться.
В течение временных интервалов обнаружения посторонних объектов во временных кадрах этапа передачи мощности приемник мощности отключает/отсоединяет нагрузку, что приводит к снижению уровня мощности, передаваемой на приемник мощности сигналом передачи мощности.
Как упоминалось ранее, снижение уровня мощности не обязательно соответствует снижению напряженности генерируемого электромагнитного поля. Например, уровень мощности при ее передаче значительно снижается за счет уменьшения нагрузки поля приемником мощности, например при отключении нагрузки 303, при этом получаемая в результате напряженность электромагнитного поля/уровень сигнала генерируемого электромагнитного сигнала может повышаться. Фактически, как правило, может быть желательным поддерживать относительно высокую напряженность магнитного поля для возможности измерения достаточного рассеивания мощности на постороннем объекте и, таким образом, облегчить и улучшить обнаружение посторонних объектов. В то же время, как правило, желательно, чтобы напряженность поля была достаточно низкой для того, чтобы не вызвать неприемлемые условия перенапряжения, когда нагрузка 303 отключена.
Приемник 105 мощности может соответствующим образом уменьшить нагрузку приемника мощности для сигнала передачи мощности в течение временного интервала обнаружения посторонних объектов. В частности, нагрузка для сигнала передачи мощности (который функционирует в качестве электромагнитного проверочного сигнала), обеспечиваемая приемником мощности в течение временного интервала обнаружения посторонних объектов, будет меньшей, чем нагрузка для сигнала передачи мощности, обеспечиваемая приемником мощности в течение временного интервала передачи мощности (нагрузкой может, например, считаться эффективное полное активное сопротивление, соответственно, катушки 103 передатчика и проверочной катушки 209 в течение, соответственно, временного интервала передачи мощности и временного интервала обнаружения посторонних объектов).
Путем снижения уровня мощности, извлекаемой приемником мощности, обнаружить присутствие постороннего объекта становится легче. Это может быть результатом понижения общего количества извлекаемой мощности, тем самым облегчая обнаружение уровней мощности для мощности, извлекаемой посторонним объектом. Далее, путем отключения нагрузки, приемник мощности, как правило, может быть введен в заданное (или по меньшей мере его может быть легче прогнозировать) состояние, тем самым способствуя компенсации для приемника мощности при выполнении проверочного обнаружения постороннего объекта.
Таким образом, отключение коммутируемой нагрузки 303 не только уменьшает нагрузку для сигнала передачи мощности, но также позволяет обеспечить более предсказуемую нагрузку и уменьшение ее изменения. Как правило, нагрузка передатчика мощности приемником мощности может значительно изменяться не только в разных вариантах применения, но также в зависимости от времени для одного и того же варианта применения и сеанса передачи мощности. Контур управления мощностью приводят в действие в течение этапа передачи мощности для адаптации к таким изменениям. Однако при вводе временного интервала обнаружения посторонних объектов, в котором нагрузка может быть отключена, можно перевести приемник мощности в эталонный режим, в котором нагрузка электромагнитного поля более предсказуема. Таким образом, например проверки по обнаружению посторонних объектов могут быть выполнены на основании того предположения, что приемник мощности находится в указанном эталонном или проверочном режиме и, таким образом, например, можно предположить установку заданной нагрузки электромагнитного проверочного сигнала. Таким образом, данный подход может не только позволить уменьшить нагрузку приемника 105 мощности (таким образом, повысив точность при относительно более сильном влиянии любых посторонних объектов), но также позволяет сделать ее более предсказуемой, таким образом облегчая компенсацию присутствия приемника мощности в течение проверки по обнаружению посторонних объектов.
Таким образом, система, показанная ФИГ. 1-5, обеспечивает значительно улучшенный подход к проверке по обнаружению посторонних объектов, при котором проверки по обнаружению посторонних объектов выполняются в гораздо более управляемых условиях, что позволяет проводить более точные и надежные проверки по обнаружению посторонних объектов.
Существенная проблема в такой системе заключается в том, чтобы приемник мощности и передатчик мощности были полностью синхронизированы, и, в частности, важно, чтобы приемник мощности подключал и, в частности, отключал нагрузку в соответствующие моменты времени. Например, в течение типичной операции передачи мощности уровень мощности в сигнале передачи мощности может быть очень высоким в течение временных интервалов передачи мощности. Если нагрузка приемника мощности отключена в течение времени, когда передатчик мощности генерирует такое сильное электромагнитное поле и сигнал передачи мощности, в приемнике мощности может быть индуцировано перенапряжение, когда нагрузка отключена. Когда нагрузка отключена, резонансный ток передатчика мощности, который подключен через катушку (103) передатчика и катушку (107) приемника в приемнике мощности, больше не приглушается нагрузкой. Фактически, существует риск того, что индуцированное напряжение в приемнике мощности может повыситься до уровня, который может привести к повреждению компонентов приемника мощности, когда он отключает нагрузку.
Однако повторяющийся временной кадр обеспечивает передатчику мощности возможность понижения уровня сигнала в течение временных интервалов обнаружения посторонних объектов до уровня, при котором индуцированное напряжение не вредит компонентам приемника мощности. Если приемник мощности отключает свою нагрузку после соответствующего снижения напряженности электромагнитного поля/уровня сигнала, то состояние перенапряжения при отключении может быть предотвращено. Например, приемник мощности может измерять, например, индуцированное напряжение на своей катушке приемника для обнаружения понижения сигнала мощности для его использования в качестве триггера для запуска интервала обнаружения посторонних объектов и он может продолжить отключение своей нагрузки при этом триггере. Однако зачастую этот способ не является очень надежным, поскольку понижение могло быть вызвано другими состояниями, такими как указание начала интервала обнаружения посторонних объектов. Например, передатчик мощности может понизить сигнал мощности вследствие ошибки управления, ранее принятой от приемника мощности. Кроме того, изменение нагрузки может привести к понижению индуцированного напряжения на катушке приемника. Таким образом, приемник мощности нуждается в надежном способе определения начала интервала обнаружения посторонних объектов в ситуациях, в которых сигнал мощности является высоким в интервалах передачи мощности, для предотвращения перенапряжения и повреждения его компонентов при отключении нагрузки.
В конце временного интервала обнаружения посторонних объектов нагрузку повторно подключают к катушке 107 приемника таким образом, что она нагружает сигнал передачи мощности. И снова, для нагрузки желательно, чтобы она была подключена перед временным интервалом передачи мощности для обеспечения того, чтобы повышенное электромагнитное поле не индуцировало слишком высокое напряжение, которое приводит к состоянию перенапряжения. И снова, приемник мощности нуждается в надежном способе повторного своевременного подключения нагрузки, а именно перед повышением уровня сигнала передатчиком мощности.
Таким образом, как правило, предпочтительно, чтобы отключение и повторное подключение нагрузки происходило в пределах временного интервала обнаружения посторонних объектов. Однако желательно, чтобы время, доступное для обнаружения постороннего объекта, было достаточно большим для обеспечения возможности точного измерения (при достаточном усреднении). Кроме того, эти конфликтующие предпочтения ограничены общим желанием сделать временные интервалы обнаружения посторонних объектом максимально возможно короткими для повышения эффективности и минимизации прерываний при эффективной передаче мощности. Таким образом, желательно отключить нагрузку в течение максимально возможно короткого времени после начала временного интервала обнаружения посторонних объектов и подключить нагрузку максимально возможно близко к концу временного интервала обнаружения посторонних объектов. Для достижения безопасного отключения нагрузки и оптимальных характеристик, важно надежно и полностью синхронизировать работу приемника мощности и, в частности, контроллера 309 нагрузки, с повторяющимся временным кадром.
Время операций приемника мощности основано на локальной временной привязке/временной развертке, а контроллер 309 нагрузки выполнен с возможностью осуществления временной привязки между подключением и отключением нагрузки 303 на основе локальной временной привязки/развертки. Кроме того, приемник 105 мощности содержит синхронизатор 311, который выполнен с возможностью синхронизации локальной временной привязки с повторяющимся временным кадром. Таким образом, приемник 105 мощности содержит функционал для синхронизации подключения и отключения нагрузки 303 с повторяющимся временным кадром в сигнале передачи мощности.
Например, локальная временная привязка может быть реализована с использованием таймера/часов и т.д., что будет хорошо известно специалисту в данной области техники. В некоторых вариантах осуществления этот таймер/часы может представлять собой временную развертку со свободным ходом, а синхронизатор 311 может определять время этой временной развертки со свободным ходом, которое соответствует различным временным отрезкам/интервалам в повторяющемся временном кадре. Например, синхронизатор 311 может определять, какие значения времени из временной развертки соответствуют началу и концу временных интервалов обнаружения посторонних объектов, а выполнение подключения и отключения нагрузки 303 затем может быть запланировано на это время (как правило, с небольшим сдвигом).
В других вариантах реализации синхронизатор 311 может быть выполнен с возможностью изменения параметров или настроек временной привязки таким образом, чтобы она согласовывалась с повторяющимся временным кадром. Например, таймер обратного отсчета может быть запущен, когда синхронизатор 311 считает, что временной интервал обнаружения посторонних объектов начался (или непосредственно после него) и может иметь продолжительность, которая определена, как соответствующая продолжительности временного интервала обнаружения посторонних объектов, определенной синхронизатором 311 (или немного короче). Далее, контроллер 309 нагрузки может быть выполнен с возможностью отключения нагрузки 303, когда таймер обратного отсчета был запущен, и ее отключения, когда таймер обратного отсчета завершил обратный отсчет.
Во многих вариантах осуществления синхронизатор 311 может быть выполнен с возможностью реализации временного цикла с сигналом ошибки, генерируемым для отражения отличий между повторяющимся временным кадром и временным циклом. Затем, временной цикл может быть возбужден этим сигналом ошибки, в результате давая сдвиг в направлении временной ошибки/отличия и, следовательно, давая временной цикл, синхронизируемый с повторяющимся временным кадром. Например, временной цикл фазовой синхронизации может быть реализован для генерирования часов локального времени, которые синхронизированы с повторяющимся временным кадром, и, в частности, с временными интервалами обнаружения посторонних объектов.
Следует понимать, что конкретный подход для синхронизации локальной временной привязки с повторяющимся временным кадром может зависеть от конкретных параметров и требований отдельного варианта осуществления.
Например, в некоторых вариантах осуществления ввод на инвертер, возбуждающий катушку 103 передатчика, может генерировать сигнал возбуждения, имеющий динамические вариации, которые могут быть синхронизированы с повторяющимся временным кадром (например, на инвертер может быть подано периодически меняющееся напряжение подачи мощности (например, генерируемое путем выпрямления питающего напряжения переменного тока)). Это может привести к периодическим и синхронизированным изменениям в сигнале передачи мощности, которые могут быть обнаружены синхронизатором 311 и с которыми он может синхронизироваться.
Однако во многих других передатчиках мощности такие периодические изменения в сигнале возбуждения/сигнале передачи мощности не являются практичными или желательными, например, как правило, сглаженное и отрегулированное напряжение постоянного тока используется в качестве питающего напряжения на инвертер. В таких вариантах осуществления передатчик мощности может быть выполнен с возможностью изменения свойств сигнала передачи мощности/генерируемого электромагнитного поля/сигнала между интервалами передачи мощности и временными интервалами обнаружения посторонних объектов, а синхронизатор 311 может быть выполнен с возможностью синхронизации локальной временной привязки на основе этих изменений.
Таким образом, синхронизатор 311, в частности, обеспечивает возможность полной синхронизации подключения и отключения нагрузки 303 по времени с повторяющимся временным кадром и временными интервалами обнаружения посторонних объектов. В частности, он может обеспечивать возможность выполнения отключения через короткое время после начала временного интервала обнаружения посторонних объектов и выполнения повторного подключения за короткое время перед концом временного интервала обнаружения посторонних объектов, тем самым обеспечивая, чтобы продолжительность временного интервала обнаружения посторонних объектов могла быть уменьшена и чтобы издержки и допуск для обеспечения надежной работы при подключении и отключении нагрузки могли быть минимизированы.
Однако в приемнике мощности, изображенном на ФИГ. 3, синхронизатор 311 выполняет не только синхронизацию, но он также переходит к генерированию меры надежности синхронизации. Мера надежности генерируется в качестве указания оцененной надежности/точности синхронизации. В частности, она может быть учтена для отражения того, насколько полно временная привязка синхронизирована с повторяющимся временным кадром, и/или вероятности того, что синхронизация находится в пределах заданного окна синхронизации. Мера надежности может быть сгенерирована для обеспечения оценки разницы между синхронизированной временной привязкой и повторяющимся временным кадром. Оценка может представлять собой вероятностную оценку.
Следует понимать, что несмотря на то, что будет описан ряд различных подходов для определения меры надежности, конкретный подход будет зависеть от предпочтений и требований отдельного варианта осуществления, и что специалистом в данной области техники может быть использовано большое количество более или менее точных подходов.
Приемник 105 мощности дополнительно содержит контроллер 313 режима, на который подают определенную меру надежности для синхронизации. Контроллер 313 режима выполнен с возможностью переключения приемника 105 мощности между различными режимами работы и, в частности, он выполнен с возможностью переключения приемника мощности между первым режимом работы и вторым режимом работы для временных интервалов передачи мощности в ответ на меру надежности. Таким образом, приемник 105 мощности выполнен с возможностью работы различным образом в течение временных интервалов передачи мощности в зависимости от надежности синхронизации приемника 105 мощности и, в частности, от синхронизации отключения нагрузки, с повторяющимся временным кадром.
Во многих вариантах осуществления уровень сигнала передачи мощности в течение временных интервалов передачи мощности снижается в первом режиме относительно такового во втором режиме работы.
Следовательно, характеристики синхронизации берут во внимание для работы приемника мощности, и, фактически, работу адаптируют в течение временных интервалов передачи мощности в зависимости от надежности синхронизации отключения (и, как правило, повторного подключения) нагрузки - даже если эти действия происходят в течение временных интервалов обнаружения посторонних объектов.
В частности, в первом и втором режимах работы могут использоваться различные параметры передачи мощности для операции передачи мощности. Например, требуемые уровни мощности и/или нагрузка и мощность, извлекаемые из сигнала передачи мощности, могут отличаться в первом и втором режимах работы. В первом и втором режимах работы могут использовать различные параметры передачи мощности посредством по меньшей мере одного из: применения другого предела для уровня сигнала передачи мощности в первом и втором режимах работы, использование другой нагрузки сигнала передачи мощности в первом и втором режимах работы, применение другого предела к частоте изменений уровней мощности сигнала передачи мощности в первом и втором режимах работы. Эти примеры будут описаны более подробно далее.
В частности, контроллер 313 режима может быть выполнен с возможностью переключения приемника 105 мощности с первого режима (работы) на второй режим (работы) в ответ на обнаружение того, что мера надежности превышает заданное пороговое значение. Аналогичным образом, контроллер 313 режима может быть выполнен с возможностью переключения приемника 105 мощности со второго режима (работы) на первый режим (работы) в ответ на обнаружение того, что мера надежности падает ниже заданного порогового значения (два пороговых значения могут быть одинаковыми, но это не обязательно). Таким образом, приемник 105 мощности может функционировать в различных режимах в течение временных интервалов передачи мощности в зависимости оттого, является ли синхронизация надежной или нет.
Это может обеспечивать более надежную и более безопасную работу во многих вариантах осуществления.
Например, в некоторых вариантах осуществления приемник 105 мощности и, в частности, контроллер 309 нагрузки, выполнены с возможностью отключения нагрузки 303 в течение временных интервалов передачи мощности в первом режиме, но не во втором режиме. Фактически, в этом примере нагрузка 303 в некоторых вариантах осуществления может быть отключена в течение всего повторяющегося временного кадра в первом режиме, тогда как при работе во втором режиме используют периодическое отключение нагрузки 303 в течение временных интервалов обнаружения посторонних объектов. Следовательно, когда мера надежности указывает на то, что синхронизация не надежная, нагрузка 303 может быть отключена в течение временных интервалов передачи мощности и временных интервалов обнаружения посторонних объектов, и, как правило, для всей продолжительности повторяющегося временного кадра, тогда как когда мера надежности указывает на то, что синхронизация надежная, нагрузка 303 отключается только временно в течение временных интервалов обнаружения посторонних объектов.
Кроме того, для предотвращения неприемлемо высокого индуцируемого напряжения на приемнике мощности, приемник мощности может обеспечивать, чтобы уровень сигнала, выдаваемого передатчиком мощности, был достаточно низким. Приемник мощности может управлять уровнем сигнала мощности, выдаваемого передатчиком мощности, путем отправки ошибок управления. В частности, если синхронизация считается ненадежной, то приемник мощности может управлять передатчиком мощности для снижения уровня мощности/напряженности сигнала.
При этом подходе первый режим обеспечивает отсутствие переключений отключения нагрузки в то время, когда индуцированный сигнал потенциально может иметь большое значение. Таким образом, ошибки или неточности в синхронизации не будут приводить к состояниям перенапряжения, возникающим при отключениях в течение временных интервалов передачи мощности. Однако, когда синхронизация является достаточно точной для обеспечения того, чтобы отключения происходили в пределах временных интервалов обнаружения посторонних объектов, система переходит на режим работы, при котором выполняется передача мощности (приемник мощности может управлять уровнем сигнала, выдаваемого передатчиком мощности, до высокого уровня) и подключение нагрузки в течение временных интервалов обнаружения посторонних объектов. Этот переход между различными режимами работы может обеспечить рабочие параметры и критерии для временных интервалов обнаружения посторонних объектов, а также более высокую точность отключения нагрузки во втором режиме работы, при этом также обеспечивая ее более высокую сдержанность с меньшим допуском. Это предотвращает состояние перенапряжения, которое может привести к повреждению электронных компонентов приемника мощности, а также может снизить время, требуемое для временных интервалов обнаружения посторонних объектов, поскольку с начала временного интервала обнаружения посторонних объектов до отключения нагрузки требуется меньший допуск.
В некоторых вариантах осуществления такой подход может быть применен в течение этапа передачи мощности и, например, приемник мощности может выполнять непрерывный мониторинг статуса синхронизации и переключение на первый режим, если мера надежности становится показательной в отношении того, что синхронизация не является достаточно надежной, а затем переключение обратно к нормальной работе, когда мера надежности указывает на то, что синхронизация вновь является надежной.
Это может подойти для некоторых вариантов применения, таких как некритичная зарядка батареи, однако может не подойти для других вариантов применения, в которых требуются гарантированные характеристики непрерывной передачи мощности. При таких сценариях приемник мощности, например, может быть выполнен с возможностью полного прекращения операции передачи мощности, если синхронизация становится ненадежной. Кроме того, в таких вариантах осуществления могут быть определены параметры для обеспечения того, чтобы такая ситуация происходила лишь очень редко.
Во многих вариантах осуществления система может быть выполнена с возможностью реализации этапа синхронизации изначально при входе на этап передачи мощности. Таким образом, этап передачи мощности может начинаться вместе с интервалом синхронизации, на котором выполняется синхронизация приемника мощности с временным интервалом пониженной мощности у сигнала передачи мощности. В таких вариантах осуществления приемник мощности может входить на этап передачи мощности и этап/временной интервал синхронизации в первом режиме работы, а переключаться на второй режим только тогда, когда мера надежности указывает на то, что синхронизация является достаточной надежной. Такой подход, как правило, будет предпочтителен даже для более критических вариантов применения, требующих непрерывной передачи мощности.
Таким образом, во многих вариантах осуществления контроллер 313 режима управляет приемником 105 мощности для работы в первом режиме работы, когда он входит на этап передачи мощности. Кроме того, при входе на этап передачи мощности синхронизатор 311 выполняет синхронизацию локальной временной привязки с повторяющимся временным кадром. Таким образом, система может начать этап передачи мощности в состоянии и режиме, когда приемник 105 мощности не синхронизирован (гарантированно, в достаточной степени) с повторяющимся временным кадром. Однако это компенсируется приемником 105 мощности, функционирующим в первом режиме, который может быть выполнен с возможностью обеспечения подходящих характеристик для ситуации, когда приемник 105 мощности не синхронизирован с передатчиком 101 мощности/повторяющимся временным кадром. В конкретном примере это достигается благодаря поддержанию нагрузки 303 постоянно отключенной в течение повторяющегося временного кадра, тем самым обеспечивая невозможность возникновения состояний перенапряжения, обусловленных отключением нагрузки 303.
Кроме того, уровень сигнала, выдаваемого передатчиком мощности под управлением приемника мощности, как правило, понижается в первом режиме для обеспечения отсутствия возникновения перенапряжения, когда нагрузка перманентно отключена.
Как правило, работа является такой, что уровень генерируемого сигнала и снижения нагрузки находятся в тесном взаимодействии:
1. Высокий уровень сигнала и отключенная нагрузка могут привести к перенапряжению и даже потенциальному повреждению приемника мощности
2. Низкий уровень сигнала и подключенная нагрузка могут привести к недостаточному напряжению и прекращению работы приемника мощности.
Следовательно, приемник мощности может модифицировать операцию подключения/отключения нагрузок и настройку уровня сигнала на основе того, в каком режиме функционирует приемник мощности.
В конкретном примере выполняется вход на безопасный начальный этап, на котором может быть выполнена синхронизация (или может быть обеспечена более точная синхронизация) и в течение которого приемник мощности выполнен с возможностью работы в «безопасном» режиме, при котором ошибки синхронизации не приводят к возникновению потенциальных состояний повреждения. В конкретном примере приемник мощности отключает нагрузку 303 в течение всего этапа синхронизации, а также управляет передатчиком мощности для генерирования электромагнитного поля с достаточно низким уровнем сигнала.
Контроллер 313 режима поддерживает приемник 105 мощности в первом (безопасном) режиме до тех пор, пока мера надежности не укажет на то, что синхронизация является достаточно точной, во время чего он переключит контроллер 313 режима на второй режим работы, при котором происходит «нормальная» передача мощности и при котором, в частности, нагрузка 303 подключается в течение временных интервалов передачи мощности. Таким образом, приемник 105 мощности остается в «безопасном» режиме синхронизации до тех пор, пока мера надежности не укажет на то, что была достигнута достаточно точная и надежная синхронизация.
Следует понимать, что несмотря на то, что в представленном выше примере отключение нагрузки 303 происходит полностью в течение этапа синхронизации, в других вариантах осуществления это не является обязательным условием. Например, в некоторых вариантах осуществления только часть нагрузки 303 может быть отключена в течение этапа синхронизации, т.е. приемник 105 мощности может быть выполнен с возможностью подключения меньшей нагрузки к катушке 107 приемника в течение этапа синхронизации чем в течение нормальной передачи мощности. Например, нагрузка может быть понижена до уровня, на котором состояние перенапряжения является приемлемым.
В различных вариантах осуществления могут быть использованы различные подходы и алгоритмы для синхронизации локальной временной привязки с повторяющимся временным кадром. Во многих вариантах осуществления передатчик 101 мощности может быть выполнен с возможностью изменения уровня генерируемого электромагнитного поля таким образом, чтобы изменения были синхронизированы с повторяющимся временным кадром. Затем, синхронизатор 311 может выполнять мониторинг изменений и синхронизировать с ними временную привязку.
В качестве примера, передатчик 101 мощности может быть выполнен с возможностью вставки короткого заданного паттерна или сигнатуры изменений уровня в начале каждого повторяющегося временного кадра, а синхронизатор 311 может быть выполнен с возможностью обнаружения этого паттерна/сигнатуры и определения времени начала повторяющегося временного кадра из времени обнаруженного паттерна/сигнатуры.
Во многих вариантах осуществления передатчик 101 мощности может быть выполнен с возможностью генерирования электромагнитного сигнала таким образом, чтобы уровень сигнала отличался в течение временных интервалов передачи мощности и временных интервалов обнаружения посторонних объектов, а синхронизатор 311 может быть выполнен с возможностью синхронизации локальной временной привязки с получаемыми в результате изменениями уровня сигнала. В частности, синхронизатор 311 может обнаруживать время переходов уровня сигнала передачи мощности (в частности, сигнала, индуцируемого в катушке приемника мощности) и регулировать или компенсировать локальную временную привязку таким образом, чтобы время локально сгенерированного повторяющегося временного кадра соответствовало этим переходам. Например, в некоторых вариантах осуществления разница времени между обнаруженными перехода уровня сигнала и ожидаемым переходом между временным интервалом обнаружения посторонних объектов и временным интервалом передачи мощности согласно локальной временной привязке может быть использовано в качестве сигнала ошибки для синхронизированного по фазе временного цикла, управляющего локальной временной привязкой.
В некоторых вариантах осуществления передатчик мощности может быть выполнен с возможностью автоматического введения или обеспечения таких переходов. Однако в других вариантах осуществления приемник мощности может быть выполнен с возможностью осуществления связи с передатчиком мощности для обеспечения таких изменений уровня сигнала.
Например, контроллер 301 приемника мощности может быть выполнен с возможностью передачи запросов уровня сигнала для сигнала передачи мощности на передатчик мощности в течение этапа синхронизации и, следовательно, когда приемник мощности функционирует в первом режиме. Эти запросы уровня сигнала могут быть выбраны таким образом, чтобы уровень сигнала передачи мощности в течение интервалов передачи мощности отличался от уровня сигнала передачи мощности в течение интервалов обнаружения посторонних объектов. Кроме того, это может управлять передатчиком мощности для генерирования уровня сигнала, который является достаточно низким для того, чтобы не приводить к состояниям неприемлемого перенапряжения.
В частности, передатчик 101 мощности может быть выполнен с возможностью выдачи заданного уровня сигнала в течение временных интервалов обнаружения посторонних объектов, такого как, например, заданный уровень или уровень, определенный ранее при связи с приемником мощности (как будет описано далее). Таким образом, передатчик мощности может быть выполнен с возможностью задания уровня сигнала для сигнала возбуждения и, следовательно, для сгенерированного электромагнитного поля, на это статическое значение в течение временных интервалов обнаружения посторонних объектов в кадрах. Однако система может управлять контуром управления мощностью для динамической регулировки уровней временных интервалов передачи мощности. Этот контур управления мощностью может быть активен в течение этапа передачи мощности и использован для адаптации сигнала передачи мощности для обеспечения необходимого уровня мощности. Однако в течение этапа синхронизации контур управления мощностью может быть использован приемником мощности для адаптации уровня сигнала на временных интервалах передачи мощности таким образом, чтобы он отличался от такового в течение временных интервалов обнаружения посторонних объектов.
Например, приемник мощности может передавать запросы на повышение мощности до тех пор, пока синхронизатор 311 точно не обнаружит переходы уровня сигнала (и, например, до тех пор, пока эти переходы не будут иметь заданную величину). Затем, приемник мощности может продолжить передачу запросов на повышение мощности и понижение мощности для поддержания уровня в течение временных интервалов передачи мощности на этом предпочтительном уровне.
В течение этапа синхронизации контур управления мощностью может быть соответствующим образом использован приемником мощности для генерирования подходящих условий для синхронизации. Конкретное преимущество такого подхода заключается в том, что в нем может использоваться функционал, который уже используется для фактической операции передачи мощности. Например, передатчик мощности может просто входить на этап передачи мощности, настраивая заданный уровень сигнала для сигнала передачи мощности в течение временных интервалов обнаружения посторонних объектов и управляя контуром управления мощностью для настройки уровня в течение временных интервалов передачи мощности. Данный подход может продолжаться в течение этапа передачи мощности вне зависимости от того, находится ли приемник мощности в течение этапа синхронизации или нет, и, следовательно, оттого, функционирует приемник мощности в первом или втором режиме. Фактически, передатчику мощности может не знать о том, что приемник мощность выполняет операцию синхронизации или что она вообще возможна. Таким образом, данный подход может обеспечивать упрощенную работу передатчика мощности и улучшенную обратную совместимость, поскольку для поддержки этапа синхронизации не требуются какие-либо конкретные изменения передатчика мощности.
Во многих вариантах осуществления система выполнена с возможностью определения параметров для повторяющегося временного кадра путем согласования/осуществления связи между приемником мощности и передатчиком мощности. Это может выполняться перед началом этапа передачи мощности и, следовательно, перед этапом передачи мощности, при этом может быть определен набор параметров для использования в течение этапа передачи мощности.
Набор параметров (который в некоторых случаях может включать в себя только один параметр), определенный путем осуществления связи перед входом на этап передачи мощности, может включать в себя одно или более из продолжительности временных интервалов для посторонних объектов, интервала между временными интервалами обнаружения посторонних объектов и уровня сигнала для интервалов для посторонних объектов.
Таким образом, передатчик мощности и приемник мощности могут использовать этап подготовки или временной интервал перед этапом передачи мощности, на которых они осуществляют связь между собой для определения одного или более параметров для последующей работы на этапе передачи мощности. Затем работа в течение этапа передачи мощности может быть основана на параметрах, определенных в течение этого этапа подготовки.
Например, во многих вариантах осуществления приемник мощности может передавать одно или более сообщений на передатчик мощности, запрашивая значение параметра, подлежащего применению в течение этапа передачи мощности. Например, он может запросить конкретный уровень сгенерированного электромагнитного сигнала или конкретную характеристику синхронизации временных интервалов обнаружения посторонних объектов. Затем передатчик мощности и приемник мощности могут применить эти значения параметров и, в частности, эти характеристики синхронизации для последующей операции.
Во многих вариантах осуществления передатчик мощности и приемник мощности могут, в частности, быть выполнены с возможностью осуществления связи для установления продолжительности временных интервалов обнаружения посторонних объектов и/или периода между временными интервалами обнаружения посторонних объектов и, как правило, периода между последовательными временными интервалами обнаружения посторонних объектов.
Такой подход может позволить достичь лучших компромиссов и может, в частности, позволить адаптировать работу к конкретным свойствам отдельных устройств, а во многих вариантах осуществления - к конкретным характеристикам отдельной операции передачи мощности. Например, синхронизация может быть адаптирована в соответствии с уровнем мощности при передаче мощности.
Данный подход позволяет обеспечить то, чтобы продолжительность временного интервала обнаружения посторонних объектов влияла на поведение не только передатчика мощности и приемника мощности, но также потенциально и на конечную нагрузку, такую как, например устройство, которое питается от приемника мощности.
Часто, если временной интервал обнаружения посторонних объектов слишком велик, на устройство может поступать пониженное эффективное напряжение питания. Это, в частности, актуально, когда накопление мощности устройством ограничено, например, когда конденсатор на входе устройства (на выходе приемника мощности) имеет емкость меньше требуемой. Устройство должно быть выполнено с возможностью перекрытия времени, в течение которого передача мощности прерывается, и для этого, как правило, требуется конденсатор относительно большой емкости (следует отметить, что во многих вариантах осуществления приемник мощности может сам содержать такой конденсатор, а также потенциально устройство для регулировки напряжения для обеспечения постоянного выходного напряжения. Однако это лишь означает, что описанная проблема будет актуальна для приемника мощности, а не для внешнего устройства-нагрузки).
Если временной слот слишком короткий, передатчик мощности может быть не в состоянии выполнить определенную операцию приемлемым образом. Например, передатчик мощности может быть не в состоянии выполнить измерение для обнаружения посторонних объектов с достаточной точностью, например вследствие того, что измерительный сигнал не был стабилизирован при выполнении измерений, или вследствие того, что могло быть взято недостаточное количество выборок. В качестве другого примера, слишком короткий временной интервал обнаружения посторонних объектов может не обеспечивать достаточной полосы пропускания связи, например может оказаться невозможным передать достаточно данных для предоставления сообщений об управлении мощностью и предоставления других результатов измерений.
Оптимальная продолжительность временного интервала обнаружения посторонних объектов соответственно может зависеть от ряда характеристик и свойств, таких как конкретные рабочие параметры и вариант реализации приемника мощности. В некоторых вариантах осуществления приемник мощности соответственно может передавать сообщение на передатчик мощности, а передатчик мощности может быть выполнен с возможностью адаптации синхронизации временного интервала обнаружения посторонних объектов в ответ на прием этого сообщения.
Сообщение может, в частности, представлять собой явный запрос заданной продолжительности временного интервала обнаружения посторонних объектов. Во многих вариантах осуществления приемник мощности может оценивать рабочие условия, такие как мощность, потребляемая внешней нагрузкой, и может вычислять максимальную продолжительность, в течение которой устройство для накопления мощности/конденсатор способен поддерживать достаточный заряд для предотвращения слишком сильного падения напряжения питания на нагрузке. Например, максимальная продолжительность может быть вдвое большей для нагрузки 1А по сравнению с нагрузкой 2А. Таким образом, приемник мощности может передавать запрос продолжительности, которая в два раза больше для нагрузки 2А, чем для нагрузки 1А.
В качестве другого примера подходящие значения продолжительности временного интервала обнаружения посторонних объектов могут быть заданы для приемника мощности, например, в течение этапа изготовления. Например, приемник мощности может представлять собой зарядное устройство для батареи с максимальным зарядным током. Соответствующий период времени, в течение которого встроенный конденсатор может сохранять заряд, достаточный для обеспечения максимального зарядного тока, может быть определен в течение этапа проектирования и сохранен для постоянного хранения в приемнике мощности в течение этапа изготовления. При инициировании передачи мощности с помощью передатчика мощности приемник мощности может получить это значение и передать запрос продолжительности временного интервала обнаружения посторонних объектов на передатчик мощности. Затем может быть осуществлен этап передачи мощности с использованием повторяющегося временного кадра, в котором временные интервалы обнаружения посторонних объектов соответствуют сохраненному значению. Поскольку приемники мощности могут очень сильно различаться по требованиям и функциям, указанные возможности могут позволить адаптировать работу передатчика мощности и операции передачи мощности к конкретным характеристикам приемника мощности.
В некоторых вариантах осуществления система может быть выполнена с возможностью установки продолжительности между временными интервалами обнаружения посторонних объектов на основании сообщения, передаваемого с приемника мощности на передатчик мощности. Система может, в частности, устанавливать продолжительность между временными интервалами обнаружения посторонних объектов последовательных повторяющихся временных кадров и может эффективно адаптировать продолжительность временного интервала обнаружения посторонних объектов в ответ на передачу сообщений с приемника мощности на передатчик мощности.
Чтобы обеспечить передачу достаточной средней мощности, обеспечивают тем больший уровень пиковой мощности при передаче мощности в течение временных интервалов передачи мощности, чем короче их продолжительность. Во многих вариантах осуществления уровень мощности при ее передаче может быть ограничен (передатчиком мощности или, возможно, приемником мощности, который может быть выполнен с возможностью только получения мощности заданной максимальной величины). В таких случаях приемник мощности может передать запрос продолжительности между временными интервалами обнаружения посторонних объектов, достаточной для обеспечения того, чтобы конденсатор был полностью заряжен до начала следующего повторяющегося временного интервала (это, в частности, применимо для вариантов осуществления, в которых передатчик мощности выключает сигнал передачи мощности в течение временных интервалов обнаружения посторонних объектов).
В некоторых вариантах осуществления один запрос может передаваться как для продолжительности временного интервала обнаружения посторонних объектов, так и для продолжительности между такими интервалами. Например, в некоторых вариантах осуществления повторяющийся временной кадр может иметь постоянную продолжительность и приемник мощности может запрашивать применение определенного рабочего цикла.
Во многих вариантах осуществления передатчик мощности выполнен с возможностью введения требования минимальной продолжительности в отношении продолжительности временного интервала обнаружения посторонних объектов. Эта минимальная продолжительность может быть использована для обеспечения того, чтобы для операции, подлежащей выполнению во временном интервале обнаружения посторонних объектов, по существу было обеспечено достаточное количество времени для достижения требуемого результата. Например, это может позволить обеспечить выполнение обнаружения посторонних объектов с достаточной надежностью (включая достаточное время для настройки и стабилизации измерительного сигнала). В качестве другого примера передатчик мощности может быть выполнен с возможностью запроса минимальной продолжительности, чтобы при осуществлении связи была обеспечена достаточная ширина полосы.
Во многих вариантах осуществления передатчик мощности выполнен с возможностью введения требования максимальной продолжительности в отношении продолжительности между временными интервалами обнаружения посторонних объектов. Эта максимальная продолжительность может быть использована для обеспечения того, чтобы операция, подлежащая выполнению во временном интервале обнаружения посторонних объектов, выполнялась достаточно часто. Например, это позволяет обеспечить выполнение обнаружения постороннего объекта с достаточно высокой частотой, чтобы появление постороннего объекта было обнаружено до того, как он может быть разогрет до неприемлемого уровня. В качестве другого примера это позволяет обеспечить достаточно частое осуществление связи (например, включение достаточной частоты обновления для контура управления мощностью).
В качестве еще одного примера, в некоторых вариантах осуществления измерения для обнаружения посторонних объектов могут быть распределены по множеству интервалов пониженной мощности для повышения точности и/или добавления некоторой избыточности. Это обеспечивает большую точность обнаружения посторонних объектов. Если продолжительность временных интервалов пониженной мощности мала и, таким образом, возможно лишь небольшое количество выборок/измерений, продолжительность между временными интервалами обнаружения посторонних объектов может быть небольшой для компенсации и обеспечения возможности получения достаточного количества выборок/измерений в течение заданного необходимого времени, что позволит обнаружить посторонний объект до того, как он слишком сильно нагреется.
Аналогичным образом, приемник мощности может быть выполнен с возможностью задания ограничений в отношении значений синхронизации. Например, приемник мощности может определять требуемое значение продолжительности временного интервала обнаружения посторонних объектов с учетом максимального значения, которое позволяет гарантировать, что на внешнюю нагрузку может быть подана достаточная мощность без разряда устройства для накопления мощности (как правило, конденсатора), что может привести к недопустимым падениям напряжения.
Аналогичным образом, приемник мощности может, как упомянуто выше, определять требуемое значение продолжительности между временными интервалами обнаружения посторонних объектов с учетом минимального значения, которое позволяет обеспечить возможность полного заряда конденсатора приемника мощности.
Во многих вариантах осуществления характеристики синхронизации повторяющегося временного интервала будут зависеть от требований, установленных как приемником мощности, так и передатчиком мощности. Как правило, для одобрения значения синхронизации требования для передатчика мощности и приемника мощности должны выполняться одновременно. Например, установка продолжительности повторяющегося временного интервала и/или продолжительности между последовательными повторяющимися временными интервалами зависит от значений, удовлетворяющих требованиям как для передатчика мощности, так и для приемника мощности.
Кроме того, во многих вариантах осуществления, как правило, одно из устройств (т.е. приемник мощности или передатчик мощности) может задавать ограничение на максимальное значение, а другое устройство задавать ограничение на минимальное значение устанавливаемой характеристики синхронизации.
В частности, как объяснено ранее, во многих вариантах осуществления продолжительность временного интервала обнаружения посторонних объектов может зависеть от минимальной продолжительности, заданной передатчиком мощности, и максимальной продолжительности, заданной приемником мощности.
Аналогичным образом, во многих вариантах осуществления продолжительность между временными интервалами обнаружения посторонних объектов может зависеть от максимальной продолжительности, заданной передатчиком мощности, и минимальной продолжительности, заданной приемником мощности.
Такие варианты реализации могут обеспечивать эффективное управление подходящими временными характеристиками для временных интервалов обнаружения посторонних объектов во многих вариантах осуществления и могут обеспечивать снижение сложности и упрощение независимого взаимодействия с обоими устройствами с обеспечением того, что временные интервалы обнаружения посторонних объектов будут иметь характеристики синхронизации, позволяющие достичь приемлемой производительности для обоих устройств, и, таким образом, для всей передачи мощности.
Конкретный подход и обмен сообщениями, используемые для установки характеристик синхронизации временных интервалов обнаружения посторонних объектов, зависят от предпочтений и требований конкретного варианта осуществления и в разных системах могут быть использованы разные подходы.
Однако во многих системах, например, как правило, применяемых для вариантов реализации типа Qi, подход основан на запросах передачи приемником мощности подходящих значений синхронизации и их одобрении передатчиком мощности или отклонении указанных значений.
Аналогичным образом, приемник мощности может запрашивать заданный уровень сигнала для применения в течение временных интервалов обнаружения посторонних объектов путем отправки указания в течение этапа подготовки. Этот запрос может быть основан на измерениях, указывающих на воздействие, которое этот собственный металл приемника мощности будет оказывать на генерируемый сигнал, на любой минимальной мощности, которую необходимо выдать на приемник мощности в течение временных интервалов обнаружения посторонних объектов, для предотвращения перенапряжения и т.д. Как правило, этот запрос будет основан на оценках номинального передатчика мощности и рабочих состояниях, и, следовательно, будет склонен отражать наиболее худший сценарий. Однако во многих вариантах осуществления он может быть использован для обеспечения изначальной настройки, которая затем может быть удалена в течение этапа передачи мощности в ответ на фактические измерения рабочих состояний.
Преимущество данного подхода заключается в том, что воздействие собственного металла приемника мощности на заданное электромагнитное поле может быть определено, например, в течение этапа производства или проектирования. Затем приемник мощности может сообщить это значение передатчику мощности, который может выполнить компенсацию воздействия со стороны приемника мощности при выполнении обнаружения посторонних объектов. Эта компенсация может быть очень точной, если приемник мощности подвергается воздействию электромагнитного поля соответствующей напряженности в течение проверки обнаружения посторонних объектов.
На ФИГ. 7 изображен (упрощенный) пример того, как система может работать.
Изначально, перед этапом передачи мощности выполняют временной слот подготовки (PREP TS). В течение этого временного слота подготовки приемник мощности отключает нагрузку 303.
Это означает, что на нагрузку не подается мощность (или подается очень незначительная мощность) и, следовательно, из сигнала, сгенерированного передатчиком мощности, не извлекается мощность (или извлекается очень незначительная мощность). Передатчик мощности может управлять сигналом возбуждения на катушку 103 передатчика для установления ситуации, при которых, предпочтительно, выполняются следующие условия:
• Влияние собственного металла устройства приемника мощности на магнитное поле известно приемнику мощности или может быть точно определено приемником мощности. Например, рассеивание мощности в собственном металле при заданной амплитуде и частота магнитного поля известны приемнику мощности.
• Передатчик мощности может точно измерить совокупное влияние собственного металла и постороннего объекта при его наличии. Например, передаваемая мощность может быть точно определена передатчиком мощности.
В результате этого система может точно определять влияние постороннего объема на магнитное поле. Это влияние предпочтительно связано с ожидаемым повышением температуры, вызванным рассеянием мощности в постороннем объекте, вызванным его воздействием на магнитное поле катушки 103 передатчика, когда передатчик мощности подает мощность на приемник мощности.
Для создания вышеуказанной ситуации приемник мощности может предоставить информацию о соответствующем магнитном поле, например, сообщив его тип, допустимый частотный диапазон и, при необходимости, требуемую амплитуду сигнала переменного тока для катушки 103 передатчика. Последний параметр, конечно, зависит от конструкции катушки 103 передатчика. Кроме того, приемник мощности может иметь измерительную катушку, индуцированное напряжение которой дает хорошее представление о поле, которое воздействует на собственный металл устройства. В этом случае приемник мощности может предоставить информацию об управлении на передатчик мощности для обеспечения уровня поля, при котором влияние собственного металла может быть точно определено приемником мощности.
Когда будет создана вышеописанная ситуация, передатчик мощности сохраняет настройку сигнала возбуждения и ожидаемое влияние собственного металла, которое определено приемником мощности.
Кроме того, может осуществляться связь для определения подходящих параметров синхронизации для повторяющегося временного кадра, таких как продолжительность повторяющегося временного кадра и временных интервалов обнаружения посторонних объектов.
В конце этапа подготовки мог быть задан набор параметров синхронизации и уровня сигнала обнаружения постороннего объекта. В частности, на этапе подготовки могли быть определены состояния измерения сигнала для временных интервалов обнаружения посторонних объектов, продолжительность временных интервалов обнаружения посторонних объектов и время между временными интервалами обнаружения посторонних объектов.
Затем передатчик мощности использует эти значения в течение этапа передачи мощности. Однако, как правило, будет присутствовать некоторая вариация/неточность, например, в отношении точного времени переходов между временным интервалом передачи мощности и временными интервалами обнаружения посторонних объектов.
Затем система может войти на этап передачи мощности, на котором применяется повторяющийся временной кадр. В примере, изображенном на ФИГ. 7, повторяющийся временной кадр начинается с временного интервала обнаружения посторонних объектов, после которого следует временной интервал передачи мощности. Система начинает работу с этапа синхронизации, на котором нагрузка 303 отключается в течение всего повторяющегося временного кадра, в том числе в течение временного интервала обнаружения посторонних объектов и временного интервала передачи мощности. На ФИГ. 7 это обозначено термином NP (Нет мощности).
Далее система выполняет синхронизацию и когда мера надежности указывает, что была достигнута желаемая надежность/уровень, при этом поддерживая сигнал мощности на уровне, на котором в приемнике мощности не происходит перенапряжение, система переключается на второй режим работы, соответствующий нормальной операции передачи мощности. В этом режиме нагрузка 303 по-прежнему отключена в течение временных интервалов обнаружения посторонних объектов, но подключена в течение временных интервалов передачи мощности. Это обозначено термином «PWR» (мощность) на ФИГ. 7. Из соображений простоты и краткости, на ФИГ. 7 изображено, что этап синхронизации включает только один повторяющийся временной кадр, однако следует понимать, что он, как правило, включает множество повторяющихся временных кадров (во многих вариантах применения этап синхронизации может включать не менее чем 10 или 20 повторяющихся временных кадров (в зависимости оттого, когда синхронизация посчиталась достигнутой).
В качестве примера конкретной операции в течение временных интервалов обнаружения посторонних объектов, предполагается, что нагрузка 303 отключена в приемнике мощности, как было описано ранее. Это означает, что на нагрузку/приемник мощности не подается мощность (или подается очень незначительная мощность). Передатчик мощности применяет сохраненную настройку сигнала возбуждения и измеряет совместное влияние собственного металла и любого присутствующего постороннего объекта. Он сравнивает влияние со сохраненным ожидаемым влиянием собственного металла для определения влияния постороннего объекта. Затем он может определить максимальную амплитуду сигнала возбуждения/сигнала передачи мощности в отношении частоты, при которой ситуация считается безопасной, то есть при которой ожидаемое повышение температуры постороннего объекта будет в безопасных пределах. Затем передатчик мощности ограничит сигнал передачи мощности до этого максимального уровня и передаст предупреждение, если приемник мощности предпринимает попытку управлять сигналом передачи мощности до уровня, выше этого максимума. Таким образом, этап передачи мощности не прекращается в случае присутствия постороннего объекта, а вместо этого максимальный уровень сигнала передачи мощности снижается до уровня, обеспечивающего ограничение повышения температуры постороннего объекта до приемлемых уровней.
Если передатчик мощности обнаруживает изменение в совместном воздействии собственного металла и постороннего объекта, он может вернуться на этап подготовки для повторного установления условий измерения для обнаружения постороннего объекта. Для предотвращения ранних триггеров для возврата к временному слоту подготовки, передатчик мощности может объединить результаты нескольких временных слотов обнаружения посторонних объектов (например, применить окно усреднения) и/или отрегулировать сигнал возбуждения в некоторых пределах.
Во многих вариантах осуществления синхронизатор 311 выполнен с возможностью осуществления синхронизации на основе набора параметров, определенных в течение этапа подготовки. Например, определенные параметры могут быть использованы в качестве начальных параметров для синхронизации и, следовательно, исходные значения параметров синхронизации могут быть заданы, как соответствующие таковым, определенным на этапе подготовки. Например, первая оценка временных переходов с временного интервала обнаружения посторонних объектов на временной интервал передачи мощности (и наоборот) может быть определена из согласованной продолжительности временных интервалов обнаружения посторонних объектов и продолжительности между ними (продолжительности повторяющегося временного кадра). Затем эти параметры могут быть использованы в качестве исходных параметров для синхронизации, например, они могут быть использованы в качестве исходных параметров для синхронизированного по фазе временного цикла, после чего выполняется определение исходных значений ошибки для отражения разницы между измеренным временем перехода уровня и заданными значениями.
В других вариантах осуществления значения, определенные в течение этапа подготовки, могут накладывать ограничения на синхронизацию. Например, синхронизатор 311 может фиксировано задавать продолжительность временных интервалов обнаружения посторонних объектов и продолжительность временных интервалов обнаружения посторонних объектов на значения, определенные в течение этапа подготовки. Затем синхронизатор 311 может адаптировать смещение синхронизации, т.е. момент времени для переходов, для достижения наилучших результатов (наименьшей ошибки) при этих условиях.
Следует понимать, что для определения меры надежности могут быть использованы различные подходы. Во многих вариантах осуществления мера надежности может быть определена на основе сигнала ошибки, указывающего на разницу между текущими значениями и измеренными значениями. Например, сигнал ошибки (усредненный/отфильтрованный низкочастотным фильтром) синхронизированного по фазе временного цикла может обеспечивать хороший показатель точности и надежности синхронизации. В других вариантах осуществления мера надежности, альтернативно или в дополнение, может быть определена в зависимости от изменчивости значений синхронизации. Например, синхронизация изначально может быть относительно ненадежной и, следовательно, изменения, например, во времени начала временного интервала обнаружения посторонних объектов может существенно меняться. Однако по мере того, как синхронизация становится более точной, изменение может задавать корректное значение, а изменения и вариации могут быть уменьшены.
В некоторых вариантах осуществления определение меры надежности может учитывать то, как долго приемник мощности функционировал в первом режиме. В некоторых вариантах осуществления может считаться, что синхронизация изначально является надежной, но будет улучшена стечением времени. В некоторых вариантах осуществления мера надежности может быть сгенерирована для отражения пониженной надежности для пониженных продолжительностей, чем для повышенных продолжительностей. В качестве примера низкой сложности, мера надежности может быть задана таким образом, чтобы отражать ненадежную синхронизацию до тех пор, пока операция синхронизации является активной в течение заданного времени. Как правило, это время будет зависеть от динамических характеристик синхронизации, например, от динамических характеристик временного цикла (например, скорости адаптации). После этого времени, мера надежности может быть задана на значение, которое зависит от размера сигнала ошибки. Такой подход может предотвратить то, что мера надежности будет отображать высокую надежность ввиду совпадающего изначально низкого сигнала ошибки перед надлежащей адаптацией цикла к синхронизации, для переключения, в результате, на второй режим работы. Это может предотвратить переключение приемника мощности на второй режим перед надлежащим выполнением синхронизации.
В некоторых вариантах осуществления мера надежности может быть определена в ответ на параметры, определенные в течение этапа подготовки. Например, синхронизатор 311 может быть выполнен с возможностью свободной синхронизации с повторяющимся временным кадром на основе, например, обнаружений переходов уровня. Получаемые в результате характеристики синхронизации, в частности, получаемая продолжительность временных интервалов обнаружения посторонних объектов и интервала между ними, затем могут быть сравнены со значениями, определенными в течение этапа подготовки. Мера надежности может быть сгенерирована для отражения того, насколько полно значения синхронизации соответствуют значениям заданной фазы (что в данном случае может рассматриваться в качестве соответствия известным значениям, подлежащим применению передатчиком мощности).
В некоторых вариантах осуществления синхронизатор 311 может быть выполнен с возможностью определения меры надежности для синхронизации на основе сравнения уровней сигнала для сигнала передачи мощности в течение временных интервалов передачи мощности и временных интервалов обнаружения посторонних объектов, соответственно. В частности, такой подход может быть приемлем для определения меры надежности в течение этапа передачи мощности после любого потенциального этапа синхронизации в течение «нормальной» операции передачи мощности.
Во многих вариантах осуществления синхронизатор 311 может непрерывно синхронизироваться с повторяющимся временным кадром сигнала передачи мощности в течение этапа передачи мощности для отслеживания изменений (в синхронизации передатчика мощности или локальной временной привязке) в течение потенциально очень долгой операции передачи мощности. Как было описано ранее, такая синхронизация может быть основана на обнаружении переходов уровня мощности во время переходов между временными интервалами. Однако приемник мощности может динамическим образом адаптировать уровень мощности сигнала передачи мощности для соответствия условиям нагрузки и, следовательно, представляется возможным, чтобы требуемый уровень сигнала передачи мощности в течение временных интервалов передачи мощности становился ближе к заданному уровню, используемому в течение временных интервалов передачи мощности. В таком случае синхронизатор 311 может не иметь возможности точно обнаружить переходы и может, следовательно, не выполнить синхронизацию. Таким образом, в некоторых примерах синхронизатор 311 может задать меру надежности на низкий уровень, указывающий на плохую синхронизацию, если он не может обнаружить достаточно большие шаги уровня сигнала.
Предыдущие примеры были сфокусированы на переключении с первого режима на второй режим при обнаружении того, что мера надежности указывает на то, что синхронизация является достаточной надежной. Однако в качестве альтернативы или дополнения, контроллер 313 режима может быть выполнен с возможностью переключения приемника мощности со второго режима на первый режим на основе меры надежности. В частности, если мера надежности падает ниже порогового значения в течение этапа передачи мощности и в течение второго режима, тем самым указывая на то, что синхронизация более не надежна, контроллер 313 режима может переключить приемник мощности обратно на первый режим работы. Таким образом, в качестве конкретного примера, если надежность синхронизации становится низкой в течение «нормальной» операции передачи мощности, то контроллер 313 режима может переключить приемник мощности на первый режим, на котором нагрузка мощности также отключается в течение временных интервалов передачи мощности, тем самым обеспечивая невозможность возникновения состояний перенапряжения, вызывающих повреждения. Кроме того, приемник мощности может инициировать специальный процесс синхронизации и, например, осуществлять связь с передатчиком мощности для применения параметров, подходящих для такой синхронизации.
В некоторых вариантах осуществления приемник мощности в первом режиме работы может быть выполнен с возможностью осуществления действий, которые, вероятно, улучшат операцию синхронизации. Фактически, во многих вариантах осуществления приемник мощности может перейти лишь к отключению нагрузки 303 в течение временных интервалов обнаружения посторонних объектов и по-прежнему поддерживать ее подключенной в течение временных интервалов передачи мощности, т.е. между первым и вторым режимами может не быть конкретных отличий в работе нагрузки. Однако приемник мощности может быть выполнен с возможностью модификации операции синхронизации и может, в частности, осуществлять связь с передатчиком мощности для изменения параметров сигнала передачи мощности, что будет способствовать синхронизации приемником мощности.
В качестве конкретного примера, контроллер 301 приемника мощности может быть выполнен с возможностью осуществления связи с передатчиком мощности для того, чтобы принудить его к изменению уровней сигнала у сигнала передачи мощности/сгенерированного электромагнитного поля таким образом, чтобы разница между временными интервалами передачи мощности и временными интервалами обнаружения посторонних объектов увеличивалась, тем самым способствуя обнаружению переходов между различными типами интервалов.
Например, как было описано ранее, контроллер 301 приемника мощности выполнен с возможностью реализации контура управления мощностью и с возможностью передачи сообщений управления мощностью на передатчик мощности. Передатчик мощности адаптирует уровень сигнала в течение временных интервалов передачи мощности в ответ на эти сообщения, а контроллер 301 приемника мощности выполнен с возможностью генерирования запросов на то, чтобы извлеченная мощность соответствовала мощности, требуемой приемником мощности для питания нагрузки 303.
Однако, если приемник мощности находится во втором режиме (и продолжается нормальная передача мощности), а мера надежности падает ниже порогового значения, указывая на то, что синхронизация больше не является достаточно точной (например, ввиду того, что уровни в течение временного интервала обнаружения посторонних объектов и временном интервале передачи мощности практически равны), контроллер 313 режима может переключить приемник мощности на первый режим работы, на котором он меняет операцию для сообщений управления мощностью таким образом, чтобы они генерировались для обеспечения большой (увеличенной) разницы между временными интервалами обнаружения посторонних объектов и временными интервалами передачи мощности. Таким образом, даже если уровень мощности достаточен (или является слишком высоким) для того, чтобы приемник мощности запитал нагрузку 303, контроллер 301 приемника мощности может продолжить передавать запросы на повышение мощности для увеличения разницы между уровнями сигнала для временных интервалов обнаружения посторонних объектов и временных интервалов передачи мощности. Например, запросы на повышение мощности могут передаваться до тех пор, пока обнаруживаемая разница не будет достаточно высокой, после чего управление мощностью может быть продолжена для поддержания этого уровня. Таким образом, в таком примере операция управления мощностью может переключиться с основанности на параметрах операции передачи мощности (требуемый уровень мощности) на основанность на параметрах синхронизации (шаг уровня сигнала между временными интервалами).
Такой подход может быть особенно выгоден для поддержания надежной синхронизации в течение этапа передачи мощности и может быть применим, например, в вариантах осуществления, в которых при входе на этап передачи мощности не выполняется начальный этап синхронизации. Например, этап передачи мощности может быть просто начат на основе исходных значений параметров, определенных в течение этапа подготовки, без необходимости в какой-либо начальной точной настройке синхронизации. Соответственно, этап передачи мощности может быть начат непосредственно приемником мощности во втором режиме работы. Однако, если обнаружено, что синхронизация в течение этапа передачи мощности становится неточной/ненадежной, то контроллер 313 режима может переключить приемник мощности на первый режим работы для выполнения (повторной) синхронизации.
Такой подход, как правило, будет применяться только тогда, когда подключенная нагрузка не извлекает низкую мощность (имеет относительно большое значение сопротивления).
Фактически, прямое начало этапа передачи мощности во втором режиме работы предназначено для высокой потребности в мощности, приемник мощности старается быстро управлять передатчиком мощности для обеспечения высокого уровня сигнала, поскольку в противном случае напряжение на приемнике мощности может упасть ниже уровня, на котором он может работать. Уровень внешней нагрузки, как правило, не находится под управлением приемника мощности; приемник должен справляться с заданной нагрузкой.
Этот подход может обеспечивать особенно эффективную работу в примере, в котором синхронизация в течение этапа передачи мощности выполняется на основе обнаружения изменений уровня сигнала между временными интервалами обнаружения посторонних объектов и временными интервалами передачи мощности.
В качестве другого примера, в некоторых вариантах осуществления контроллер 301 приемника мощности может быть выполнен с возможностью ограничения частоты изменения уровней мощности в первом режиме работы до более низкого уровня, чем во втором режиме работы. Например, когда приемник мощности работает в течение «нормальной» передачи мощности и во втором режиме работы, приемник мощности может передавать сообщения управления мощностью, которые обеспечивают возможность быстрой адаптации к контуру управления мощностью, так что он может следовать за быстрыми изменениями. Однако, если мера надежности указывает на то, что синхронизация не является надежной, например, ввиду определения того, что изменения уровня сигнала между временными интервалами передачи мощности и временными интервалами обнаружения посторонних объектов являются низкими, то контроллер 313 режима может переключить приемник мощности на первый режим работы, на котором частота изменения может быть по существу ограничена. В частности, динамика контура управления мощностью может быть изменена для реализации очень медленного контура и может только постепенно повышать уровень мощности для обеспечения времени на повторную синхронизацию и для предотвращения состояния перенапряжения на приемнике мощности, когда нагрузка отключена, что в противном случае могло бы вызвать быстрое повышение сигнала мощности, а синхронизация по-прежнему оставалась бы ненадежной. Во многих вариантах осуществления адаптация может быть асимметричной таким образом, чтобы поддерживать быстрое снижение уровня мощности, однако возможны лишь очень медленные повышения.
В других вариантах осуществления контроллер 301 приемника мощности в такой ситуации может быть выполнен с возможностью ограничения передатчика мощности для обеспечения максимального уровня сигнала мощности при переключении на первый режим, т.е. он может обеспечить более высокий уровень мощности сигнала во втором режиме, чем в первом режиме работы.
В системе приемник мощности, при работе во втором режиме, может быть выполнен с возможностью отключения нагрузки 303 вскоре после начала временных интервалов обнаружения посторонних объектов, и он может быть выполнен с возможностью повторного ее подключения за короткое время до конца временных интервалов обнаружения посторонних объектов, при этом подключение и отключение определяются на основе локальной временной привязки, синхронизированной с повторяющимся временным кадром сигнала передачи мощности. Например, может быть определено время начала и конца временных интервалов обнаружения посторонних объектов, а время переключения для отключения и повторного подключения может быть установлено на него, однако, как правило, с коротким заданным временным сдвигом для обеспечения того, чтобы переходы всегда происходили в пределах временных интервалов обнаружения посторонних объектов.
В некоторых вариантах осуществления приемник мощности может содержать ограничитель тока, выполненный с возможностью ограничения тока на нагрузку при ее повторном подключении. В частности, ограничитель тока может быть выполнен с возможностью ограничения частоты изменения для тока до заданного предела таким образом, чтобы достигалось только постепенное повышение вместо риска высокого противотока при повторном подключении нагрузки 303 (что, например, может происходить, если нагрузка 303 включает в себя большую емкостную составляющую). Ограничитель тока может быть реализован, например, в форме индуктора.
ФИГ. 8-10 могут быть использованы для иллюстрации примеров тока для такого подхода с нагрузкой 303 с составляющей сопротивления у нагрузки Rнагрузка и значительной емкостной нагрузкой Снагрузка.
В примерах нагрузка 303 отключается в начале временного интервала обнаружения посторонних объектов, соответствующем разведению контактов переключателя S. В примере напряжение на Смоет остается постоянным в течение временного интервала обнаружения посторонних объектов. Однако напряжение на Снагрузка понижается вследствие Rнагрузка (фактически, Снагрузка может действовать в качестве хранилища энергии, питающего нагрузку, представленную Rнагрузка во время отключения нагрузки 303, т.е. в течение временного интервала обнаружения посторонних объектов).
В этой ситуации, если отсутствует ограничение тока, как в примере по ФИГ. 8, то относительно высокий противоток может проходить от Смоста до Снагрузки для повторного уравновешивания этих напряжений.
Решение, которое направлено на устранение этой проблемы, заключается в ограничении изменения тока, например, путем включения индуктора между конденсаторами Смост и Снагрузка для предотвращения таких выбросов. Другой и зачастую предпочтительный подход может заключаться в реализации понижающего преобразователя, используя S в качестве переключающего элемента понижающего преобразователя. Такой пример представлен на ФИГ. 9, на которой отображены Dпонижение и Lпонижение для создания понижающего преобразователя. Во многих вариантах осуществления это может несущественно увеличить сложность, поскольку такие компоненты зачастую уже имеются, ввиду того, что во многих вариантах применения требуется определенное последующее управление напряжением в нагрузке Rнагрузка любым способом.
Следует понимать, что в приведенном выше описании для ясности варианты осуществления настоящего изобретения представлены со ссылкой на различные функциональные схемы, блоки и процессоры. Однако очевидно, что может быть использовано любое подходящее распределение функциональных возможностей между различными функциональными схемами, блоками или процессорами без ущерба для настоящего изобретения. Например, функциональные возможности, показанные как выполняемые отдельными процессорами или контроллерами, могут быть выполнены одним и тем же процессором или контроллерами. Следовательно, ссылки на конкретные функциональные блоки или схемы следует рассматривать только как ссылки на пригодные средства для обеспечения описанных функциональных возможностей, а не как указание на строгую логическую или физическую структуру или организацию.
Настоящее изобретение может быть реализовано в любой подходящей форме, включая аппаратное обеспечение, программное обеспечение, аппаратно реализованное программное обеспечение или любую их комбинацию. Настоящее изобретение также может быть реализовано, по меньшей мере частично, в виде компьютерного программного обеспечения, работающего на одном или более процессорах для обработки данных и/или процессорах для обработки цифровых сигналов. Элементы и компоненты варианта осуществления настоящего изобретения могут быть физически, функционально и логически реализованы любым подходящим способом. Фактически, функциональные возможности могут быть реализованы в одном блоке, в множестве блоков или в виде части других функциональных блоков. Таким образом, настоящее изобретение может быть реализовано в виде единого блока или может быть физически и функционально распределено между различными блоками, схемами и процессорами.
Хотя настоящее изобретение было описано в отношении некоторых вариантов осуществления, оно не ограничивается конкретной формой, изложенной в данном документе. Напротив, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. Кроме того, хотя можно подумать, что признак описан в отношении конкретных вариантов осуществления, для специалиста в данной области техники будет очевидно, что различные признаки описанных вариантов осуществления могут быть объединены в соответствии с настоящим изобретением. В формуле изобретения термин «содержащий» не исключает наличия других элементов или этапов.
Следует понимать, что ссылка на предпочтительное значение не подразумевает каких-либо ограничений, если только оно не является значением, определенным в режиме инициализации обнаружения постороннего объекта, т.е. оно является предпочтительным в силу того, что его определяют в процессе адаптации. Ссылки на предпочтительное значение могут быть заменены ссылками, например, на первое значение.
Кроме того, хотя они перечислены по отдельности, множество средств, элементов, схем или этапов способа могут быть реализованы, например, с помощью одной схемы, одного блока или одного процессора. Кроме того, хотя отдельные признаки могут быть включены в разные пункты формулы изобретения, предпочтительно они могут быть объединены и их включение в разные пункты формулы изобретения не означает, что комбинация признаков невозможна и/или не предпочтительна. Кроме того, включение признака в одну категорию пунктов формулы изобретения не подразумевает ограничения этой категории, а скорее указывает на то, что этот признак в равной степени применим к другим категориям пунктов формулы изобретения в зависимости от обстоятельств. Кроме того, порядок признаков в формуле изобретения не подразумевает какой-либо конкретный порядок, в котором эти признаки должны работать, и, в частности, порядок отдельных этапов в формуле изобретения не подразумевает, что эти этапы должны выполняться в указанном порядке. Напротив, этапы могут быть выполнены в любом подходящем порядке. Кроме того, ссылки в единственном числе не исключают множественности. Таким образом, ссылки на грамматические средства выражения формы единственного числа, а также термины «первый», «второй» и т.д. не исключают наличия множества. Ссылочные позиции в формуле изобретения представлены исключительно в качестве поясняющего примера, и их никоим образом не следует рассматривать как ограничивающие объем формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕСПРОВОДНОЙ ПЕРЕДАЧИ МОЩНОСТИ | 2019 |
|
RU2777986C2 |
| Устройство и способ беспроводной передачи энергии | 2019 |
|
RU2777966C1 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2014 |
|
RU2649907C2 |
| БЕСПРОВОДНАЯ ПЕРЕДАЧА ИНДУКТИВНОЙ МОЩНОСТИ | 2014 |
|
RU2658864C2 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА ЭНЕРГИИ | 2015 |
|
RU2674436C2 |
| ОБНАРУЖЕНИЕ ПОСТОРОННИХ ОБЪЕКТОВ В СИСТЕМЕ БЕСПРОВОДНОЙ ПЕРЕДАЧИ МОЩНОСТИ | 2018 |
|
RU2737192C1 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2015 |
|
RU2684403C2 |
| ИНДУКТИВНАЯ БЕСПРОВОДНАЯ ПЕРЕДАЧА МОЩНОСТИ С СИНХРОНИЗИРОВАННЫМ ИЗМЕРЕНИЕМ МОЩНОСТИ | 2016 |
|
RU2713466C2 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2016 |
|
RU2696491C1 |
| ПРИЕМОПЕРЕДАТЧИК И СПОСОБ ПРЕОДОЛЕНИЯ ЗАМИРАНИЯ | 1997 |
|
RU2191480C2 |


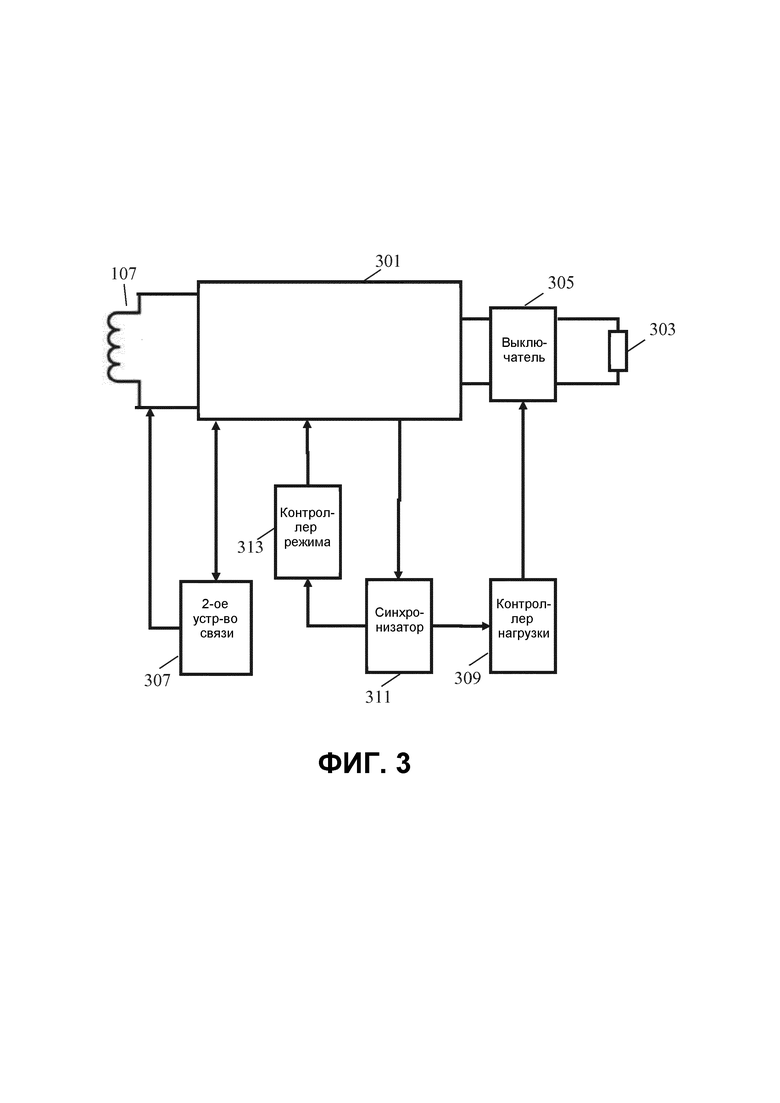
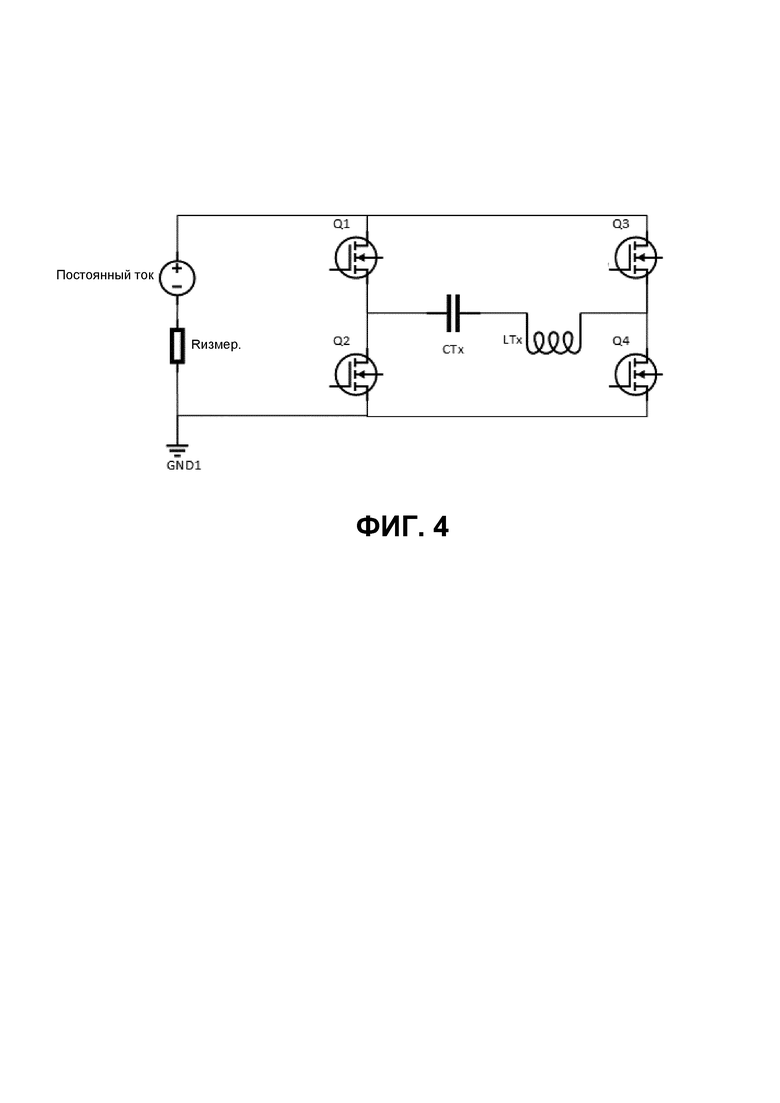
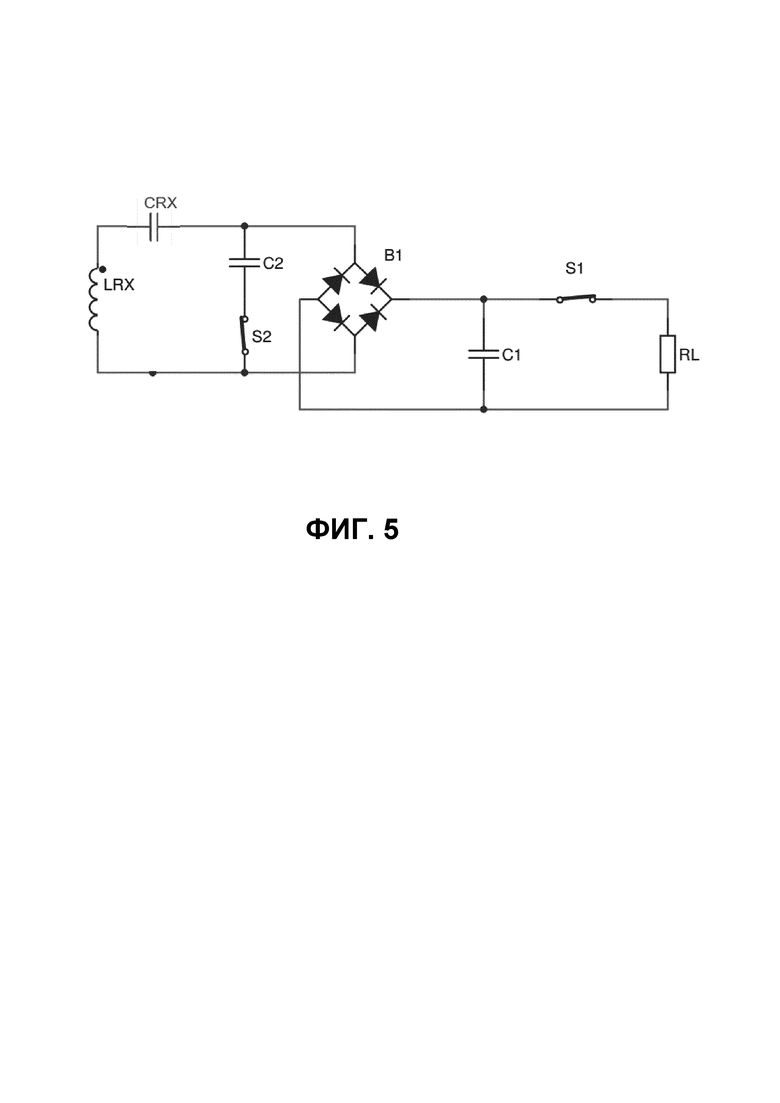



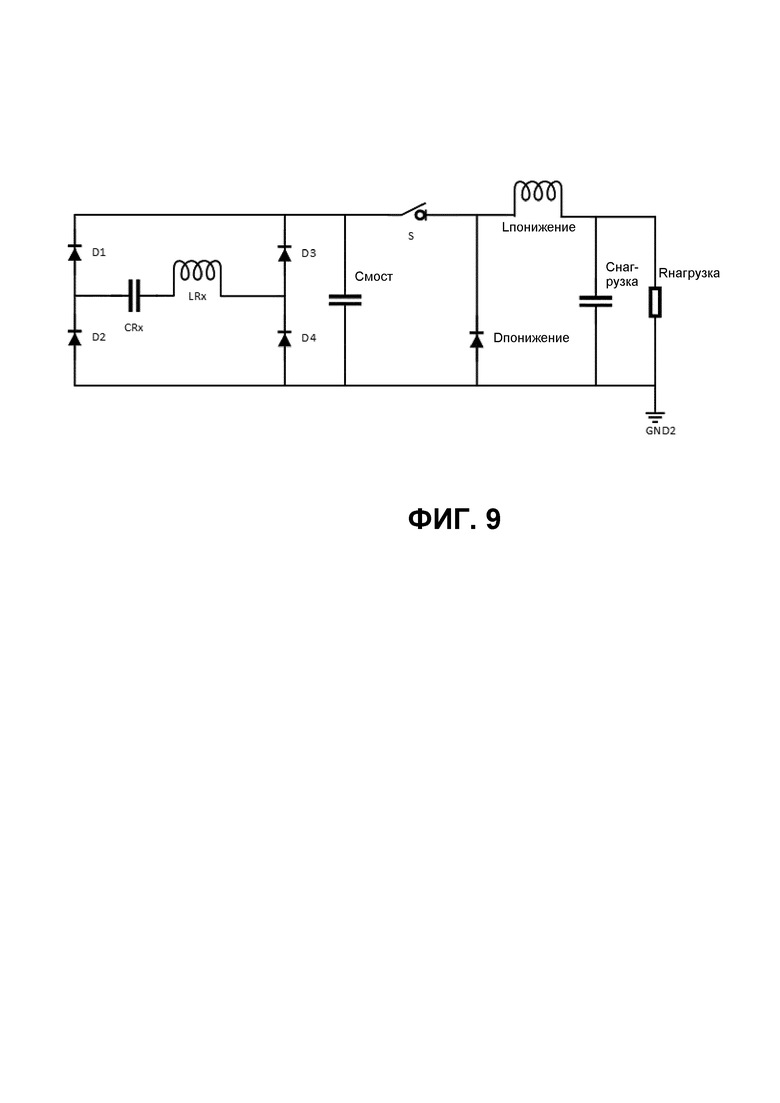
Изобретение относится к области электротехники. Технический результат заключается в повышении гибкости, улучшении обнаружения посторонних объектов, связи, поддержки различных нагрузок, адаптируемости, обратной совместимости и характеристики. Согласно изобретению приемник мощности принимает мощность, переданную беспроводным образом, из сигнала передачи мощности, сгенерированного беспроводным передатчиком мощности на этапе передачи мощности. В сигнале передачи мощности применяется повторяющийся временной кадр на этапе передачи мощности, причем кадр содержит, по меньшей мере, временной интервал передачи мощности и временной интервал обнаружения посторонних объектов. Приемник мощности содержит синхронизатор (311), который синхронизирует локальную временную привязку с повторяющимся временным кадром, и контроллер (309) нагрузки, который отключает нагрузку (303) в ходе по меньшей мере части временных интервалов обнаружения посторонних объектов по меньшей мере на части этапа передачи мощности. Время отключения зависит от локальной временной привязки. Контроллер (313) режима выполняет переключение между первым режимом работы и вторым режимом работы в течение временных интервалов передачи мощности в ответ на меру надежности синхронизации. 3 н. и 17 з.п. ф-лы, 9 ил.
1. Приемник мощности, содержащий:
схему синхронизатора,
причем схема синхронизатора выполнена с возможностью синхронизации локальной временной привязки с повторяющимся временным кадром,
причем повторяющийся временной кадр содержит по меньшей мере один интервал передачи мощности и по меньшей мере один интервал обнаружения посторонних объектов,
схему контроллера нагрузки,
причем схема контроллера нагрузки выполнена с возможностью отключения нагрузки,
причем обеспечена возможность отключения нагрузки в течение по меньшей мере части указанного по меньшей мере одного интервала обнаружения посторонних объектов,
причем обеспечена возможность отключения нагрузки в течение по меньшей мере части этапа передачи мощности,
при этом время отключения зависит от локальной временной привязки, и
схему контроллера режима, причем схема контроллера режима выполнена с возможностью переключения в течение интервала передачи мощности между первым режимом работы и вторым режимом работы в ответ на меру надежности синхронизации,
причем в первом режиме работы обеспечена возможность использования первых параметров передачи мощности, а во втором режиме работы обеспечена возможность использования вторых параметров передачи мощности,
причем первые параметры передачи мощности отличаются от вторых параметров передачи мощности,
причем приемник мощности выполнен с возможностью приема беспроводной мощности из сигнала передачи мощности,
при этом обеспечена возможность передачи сигнала передачи мощности от передатчика мощности в течение этапа передачи мощности.
2. Приемник мощности по п. 1,
в котором схема синхронизатора выполнена с возможностью осуществления синхронизации локальной временной привязки с повторяющимся временным кадром при входе на этап передачи мощности,
причем схема контроллера режима выполнена с возможностью управления приемником мощности для работы в первом режиме работы при входе на этап передачи мощности,
и схема контроллера режима выполнена с возможностью переключения приемника мощности на второй режим работы в ответ на обнаружение того, что мера надежности синхронизации превышает пороговое значение.
3. Приемник мощности по п. 2, который дополнительно содержит схему контроллера уровня сигнала,
причем схема контроллера уровня сигнала выполнена с возможностью передачи на передатчик мощности запросов уровня сигнала в отношении сигнала передачи мощности,
при этом схема контроллера уровня сигнала выполнена с возможностью управления уровнем сигнала передачи мощности в течение указанного по меньшей мере одного интервала передачи мощности для отличия от уровня сигнала передачи мощности в течение указанного по меньшей мере одного интервала обнаружения посторонних объектов в первом режиме работы,
причем схема синхронизатора выполнена с возможностью синхронизации в ответ на вариации сигнала между указанным по меньшей мере одним интервалом передачи мощности и указанным по меньшей мере одним интервалом обнаружения посторонних объектов.
4. Приемник мощности по п. 1, в котором схема синхронизатора выполнена с возможностью определения меры надежности синхронизации в ответ на продолжительность в первом режиме работы.
5. Приемник мощности по п. 1, который дополнительно содержит схему инициатора,
причем схема инициатора выполнена с возможностью определения набора параметров для указанного по меньшей мере одного интервала обнаружения посторонних объектов путем связи с передатчиком мощности перед входом на этап передачи мощности,
при этом набор параметров содержит по меньшей мере одно из:
продолжительности указанного по меньшей мере одного интервала обнаружения посторонних объектов,
интервала между двумя из интервалов обнаружения посторонних объектов,
уровня сигнала для указанного по меньшей мере одного интервала обнаружения посторонних объектов.
6. Приемник мощности по п. 5, в котором схема синхронизатора выполнена с возможностью осуществления синхронизации на основе указанного набора параметров.
7. Приемник мощности по п. 5, в котором схема синхронизатора выполнена с возможностью определения меры надежности в ответ на сравнение временного параметра для указанного по меньшей мере одного интервала обнаружения посторонних объектов, определенного из локальной временной привязки, и соответствующего временного параметра из набора параметров.
8. Приемник мощности по п. 1, который выполнен с возможностью управления передатчиком мощности так, чтобы ограничить уровень сигнала передачи мощности до уровня, который ниже в первом режиме работы, чем во втором режиме работы.
9. Приемник мощности по п. 1, в котором схема контроллера нагрузки выполнена с возможностью отключения нагрузки от сигнала передачи мощности в течение указанного по меньшей мере одного интервала передачи мощности в первом режиме работы, но не во втором режиме работы.
10. Приемник мощности по п. 1, который дополнительно содержит схему контроллера уровня мощности,
причем схема контроллера уровня мощности выполнена с возможностью передачи запросов уровня мощности в отношении сигнала передачи мощности на передатчик мощности,
при этом схема контроллера уровня мощности выполнена с возможностью ограничения частоты изменения уровней мощности в первом режиме работы до более низкого уровня, чем во втором режиме работы.
11. Приемник мощности по п. 1, в котором схема синхронизатора выполнена с возможностью определения меры надежности синхронизации в ответ на сравнение уровней сигнала для сигнала передачи мощности в течение указанного по меньшей мере одного интервала передачи мощности и указанного по меньшей мере одного интервала обнаружения посторонних объектов.
12. Приемник мощности по п. 1, в котором схема контроллера режима выполнена с возможностью переключения приемника мощности со второго режима работы на первый режим работы в ответ на обнаружение того, что мера надежности синхронизации ниже порогового значения.
13. Приемник мощности по п. 1,
в котором схема контроллера нагрузки выполнена с возможностью повторного подключения нагрузки в течение интервала обнаружения посторонних объектов в течение по меньшей мере части этапа передачи мощности,
при этом время повторного подключения зависит от локальной временной привязки.
14. Приемник мощности по п. 13, который дополнительно содержит схему ограничителя тока, причем схема ограничителя тока выполнена с возможностью ограничения тока на нагрузку при повторном подключении нагрузки.
15. Способ управления работой приемника мощности, причем приемник мощности выполнен с возможностью приема беспроводной мощности из сигнала передачи мощности от передатчика мощности в течение этапа передачи мощности, при этом способ включает:
прием беспроводной мощности из сигнала передачи мощности;
синхронизацию локальной временной привязки с повторяющимся временным кадром, причем повторяющийся временной кадр содержит по меньшей мере один интервал передачи мощности и по меньшей мере один интервал обнаружения посторонних объектов;
отключение нагрузки в течение по меньшей мере части указанного по меньшей мере одного интервала обнаружения посторонних объектов в течение по меньшей мере части этапа передачи мощности, при этом время отключения зависит от локальной временной привязки,
переключение между первым режимом работы и вторым режимом работы на протяжении указанного по меньшей мере одного интервала передачи мощности в ответ на меру надежности синхронизации,
причем в первом режиме работы используют первые параметры передачи мощности, а во втором режиме работы используют вторые параметры передачи мощности.
16. Способ по п. 15, согласно которому
при синхронизации синхронизируют локальную временную привязку с повторяющимся временным кадром при входе на этап передачи мощности,
причем при переключении управляют приемником мощности в первом режиме работы при входе на этап передачи мощности,
и при переключении управляют приемником мощности во втором режиме работы в ответ на обнаружение того, что мера надежности синхронизации превышает пороговое значение.
17. Способ по п. 16, также включающий
передачу на передатчик мощности запросов уровня сигнала в отношении сигнала передачи мощности и
управление уровнем сигнала передачи мощности в течение указанного по меньшей мере одного интервала передачи мощности для отличия от уровня сигнала передачи мощности в течение указанного по меньшей мере одного интервала обнаружения посторонних объектов в первом режиме работы,
причем при синхронизации обеспечивают синхронизацию в ответ на вариации сигнала между указанным по меньшей мере одним интервалом передачи мощности и указанным по меньшей мере одним интервалом обнаружения посторонних объектов.
18. Способ по п. 15, согласно которому при синхронизации определяют меру надежности синхронизации в ответ на продолжительность в первом режиме работы.
19. Способ по п. 15, также включающий
определение набора параметров для указанного по меньшей мере одного интервала обнаружения посторонних объектов путем связи с передатчиком мощности перед входом на этап передачи мощности,
при этом набор параметров содержит по меньшей мере одно из:
продолжительности указанного по меньшей мере одного интервала обнаружения посторонних объектов,
интервала между двумя из интервалов обнаружения посторонних объектов,
уровня сигнала для указанного по меньшей мере одного интервала обнаружения посторонних объектов.
20. Некратковременный носитель, содержащий компьютерную программу, причем при исполнении указанной компьютерной программы на процессоре обеспечено выполнение способа по п. 15.
| US 2016126747 A1, 05.05.2016 | |||
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2014 |
|
RU2649907C2 |
| WO 2013056234 A2, 18.04.2013 | |||
| US 2011169446 A1, 14.07.2011 | |||
| Устройство для парафинирования головок сыра | 1951 |
|
SU95200A1 |

