Заявляемое изобретение относится к системам контроля подвижного транспортного средства, в частности, железнодорожных вагонов.
Предлагаемая система позволяет отслеживать в режиме реального времени местоположения подвижной единицы железнодорожного состава, направление и скорость её перемещения, состояние деталей и узлов, работоспособность составляющих систему узлов и блоков, позволяет измерять вес перевозимого груза, наблюдать в режиме реального времени за процессом загрузки-разгрузки с учётом состояния внешней среды, в частности, температуры окружающего воздуха и температуры груза, например, отслеживать процесс разогрева и разгрузки смёрзшегося твёрдого или жидкого груза: угля, нефти, мазута.
Известна система для сбора данных от взаимодействующих между собой мобильных систем в виде сформированного из грузовых вагонов железнодорожного поезда, содержащих различные информационные датчики, связанные через блоки коммутации и связи в единую поездную систему, см. US №6668216, B60L 1/00, опубл. 18.05.2001 г.
Известна также система мониторинга подвижной железнодорожной единицы, содержащей аппаратные части, снабжённые соответствующим программным обеспечением, и связанные между собой по внешним и внутренним каналам связи, см. RU №2600420, B61D 49/00, G01G 19/04, опубл. 20.08.2016 г. (прототип).
Указанные системы обладают узкой областью предоставляемых функций, слабой защищённостью и неустойчивостью к внешним и внутренним воздействиям, обусловленным отсутствием возможности самодиагностики, корректирования работы системы и восстановления её работоспособности путём дистанционной загрузки обновлений, устранения сбоев и исправлений программного продукта.
Техническим результатом заявляемого изобретения является расширение области использования системы, повышение её надёжности и защищённости.
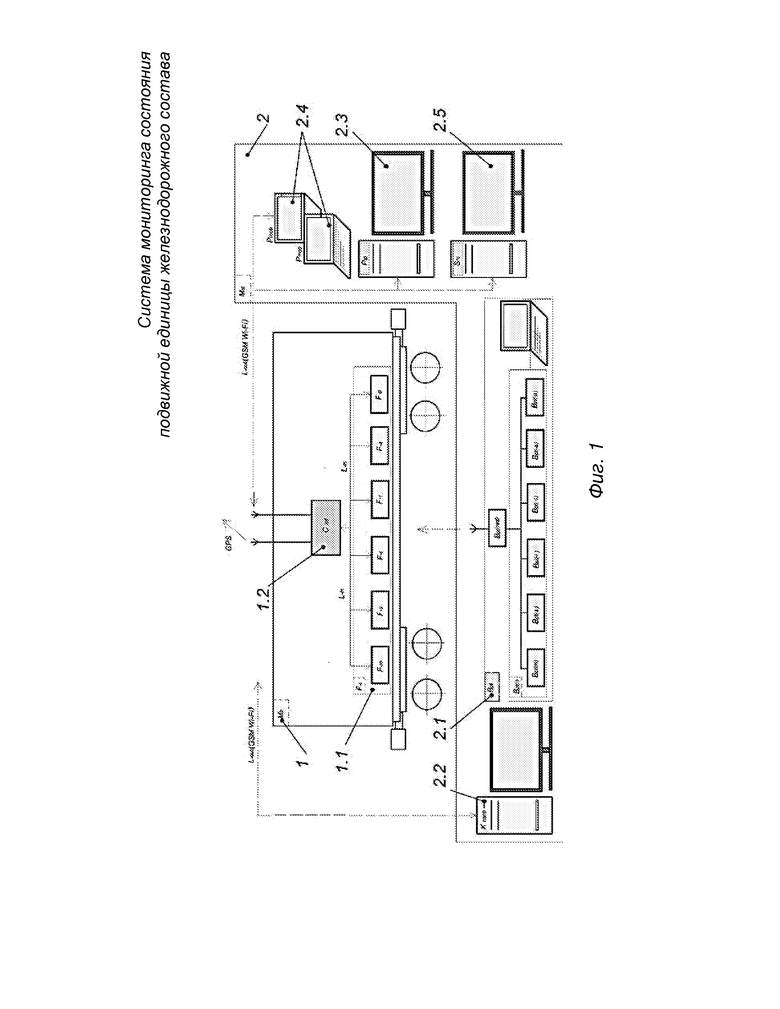
Указанный технический результат обеспечивается системой мониторинга состояния подвижной единицы железнодорожного состава, содержащей мобильную часть 1 (Mb) размещённую на подвижной единице железнодорожного состава, включающую блок-датчик 1.2.4 (Сgps) географического положения, функциональные датчики-преобразователи 1.1.1 (Fi), связанные по каналам L-in внутренней связи с центральным бортовым блоком 1.2 (Сinf ) сбора и обработки информации, который в свою очередь по каналам L-out внешней связи связан с телематическим сервером 2.5 (Srv), входящим в состав стационарной части системы 2 (Mst), содержащей стационарные 2.3 (Pst) и переносные 2.4 (Pmob) контрольно-функциональные посты, предназначенные для приёма по каналу внешней связи L-out от центрального бортового блока 1.2 (Сinf ) сбора и обработки информации подвижной единицы железнодорожного состава информации о техническом состоянии, положении подвижной единицы железнодорожного состава, система также содержит контрольно-настроечный блок 2.2 (Kcontr),предназначенный для настройки и проверки работоспособности системы, а также производственно-технологический блок 2.1 (Bpt) с блоками 2.1.3 (Bpt(i)) функционального калиброванного воздействия на функциональные датчики-преобразователи 1.1 (Fi), предназначенный для приведения системы мониторинга состояния подвижной единицы железнодорожного состава в работоспособное состояние.
Функциональные датчики-преобразователи 1.1.1 (Fi:(…)) выполнены в виде датчиков-преобразователей F-m веса.
Функциональные датчики-преобразователи 1.1.1 (Fi:(…)) выполнены в виде датчиков-преобразователей F-s деформации.
Функциональные датчики-преобразователи 1.1.1 (Fi:(…)) выполнены в виде датчиков-преобразователей F-l перемещений.
Функциональные датчики-преобразователи 1.1.1 (Fi:(…)) выполнены в виде датчиков-преобразователей F-t температуры.
Функциональные датчики-преобразователи 1.1.1 (Fi:(…)) выполнены в виде датчиков-преобразователей F-a ускорений.
Функциональные датчики-преобразователи 1.1.1 (Fi:(…)) выполнены в виде датчиков-преобразователей F-p давления.
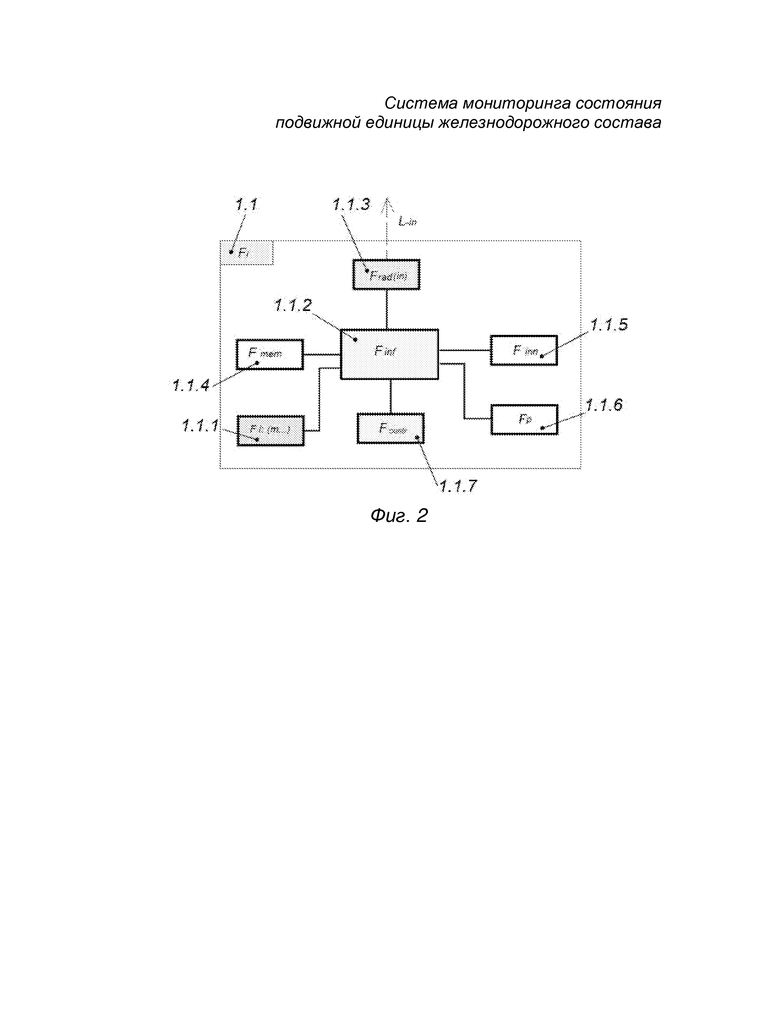
Функциональные датчики-преобразователи 1.1 (Fi) содержат соответствующий первичный функциональный датчик Fi: (m; s; l; t; a; p), соединённый с функциональным блоком обработки информации 1.1.2 (Finf), который по каналу L-in внутренней связи соединён приёмопередатчиком 1.1.3 (Frad(in)) с центральным бортовом блоком 1.2 (Сinf) сбора и обработки информации, который по каналам L-out (GSM) либо L-out (Wi-Fi) внешней связи связан с контрольно-настроечным блоком 2.2 (Kcontr), также функциональные датчики-преобразователи 1.1.1 (Fi) содержат блок хранения данных 1.1.4 (Fmem), блок идентификации 1.1.5 (Finn), блок питания 1.1.6 (Fp).
Центральный бортовой блок 1.2 (Сinf) сбора и обработки информации cодержит блок обработки данных 1.2.1 (Cd), связанный с блоком 1.2.2 (Сinn) идентификации подвижной единицы железнодорожного состава, с блоком 1.2.2 (Ср) питания, с блоком-датчиком 1.2.4 (Сgps) географического положения, с блоком 1.2.5 (Сmem) хранения данных (памяти), приёмо-передатчиком 1.2.6 (Crad(in)) канала L-in внутренней связи для связи с функциональными датчиками-преобразователи Fi, также блок обработки 1.2.1 (Cd) связан с приёмо-передатчиком 1.2.7 (Crad(out))канала L-out (GSM) внешней связи для связи с телематическим сервером 2.5 (Srv) и с приёмо-передатчиком 1.2.8 (Crad (out)) канала L-out (Wi-Fi) для связи со стационарными 2.3 (Pst) и переносным 2.4 (Pmob) контрольно-функциональными постами стационарной части системы 2 (Mst) системы, а также с контрольно-настроечным блоком 2.2 (Kcontr) и производственно-технологическим блоком 2.1 (Bpt).
Производственно-технологическим блоком 2.1 (Bpt) содержит функциональные блоки Bpt (i: m; s; l; t; a; p), соединённые с приёмопередатчиком 2.1.1 (Bbt(rad)(out)) канала L-out (GSM) внешней связи для связи с телематическим сервером 2.5 (Srv), и приёмопередатчик 2.1.2 (Bbt(rad)(in)) канала L-in (Wi-Fi) внутренней связи для связи через центральный бортовой блок 1.2 (Сinf) сбора и обработки информации подвижной единицы железнодорожного состава с функциональными датчиками-преобразователи 1.1 (Fi).
Функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.1 (Bpt(m)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-m веса.
Функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.2 (Bpt(s)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-s деформации.
Функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.3 (Bpt(l)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-l перемещений.
Функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.4 (Bpt(t)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-t температуры.
Функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.5 (Bpt(a)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-a ускорений.
Функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.5 (Bpt(p)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-p давления.
Контрольно-настроечный блок 2.2 (Kcontr), содержит блок 2.2.1 (Kcontr (inn)) введения индивидуального идентификационного номера подвижной единицы железнодорожного состава.
Контрольно-настроечный блок 2.2 (Kcontr), содержит блок 2.2.2 (Kcontr (p)) мониторинга состояния блока питания (зарядки аккумуляторов элементов) системы мониторинга.
Контрольно-настроечный блок 2.2 (Kcontr), содержит блок 2.2.3 (Kcontr (progr)) загрузки и инсталляции программного обеспечения системы мониторинга.
Контрольно-настроечный блок 2.2 (Kcontr), содержит блоки 2.2.4 (Kcontr(GSM),), 2.2.5 (Kcontr (Wi-Fi)) настройки устройств внешних Lout и внутренних Lin каналов радиосвязи системы мониторинга.
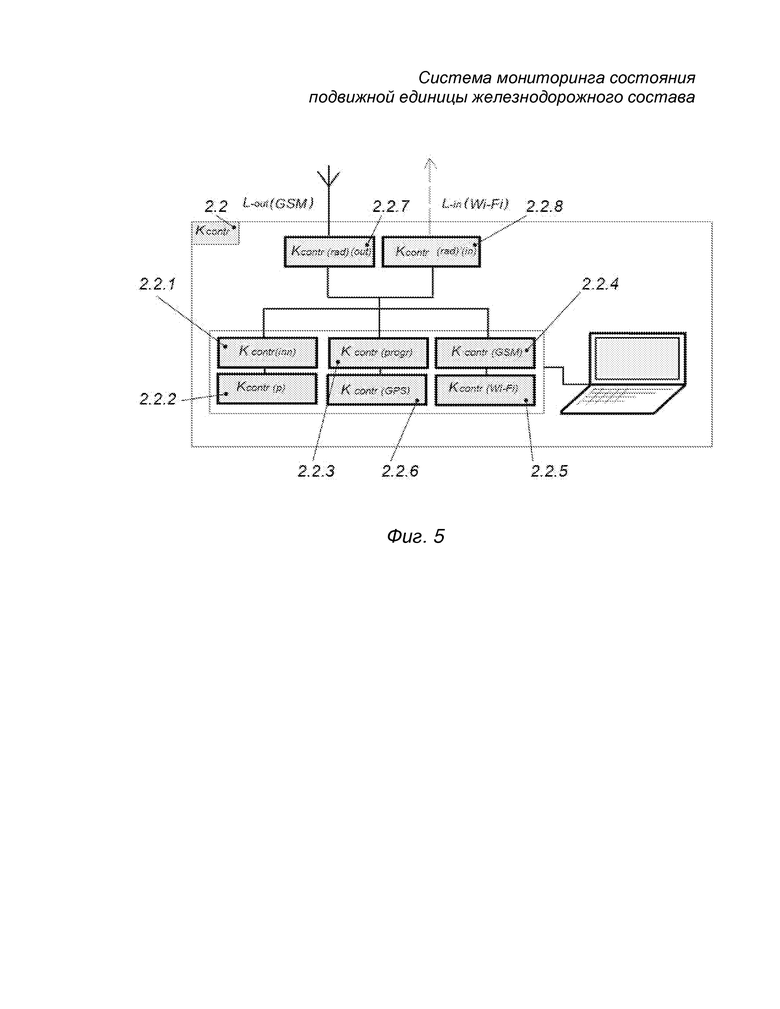
Контрольно-настроечный блок 2.2 (Kcontr) содержит приёмопередатчик 2.2.8 (Kcontr(rad)(in)) канала L-in(Wi-Fi) внутренней связи для связи с центральным бортовым блоком 1.2 (Сinf) сбора и обработки информации и через него с функциональными датчиками-преобразователями Fi, приёмопередатчик 2.2.8 (Kcontr (rad)(out)) канала L-out (GSM, Wi-Fi) внешней связи для связи с телематичесим сервером 2.5 (Srv).
Заявляемое изобретение проиллюстрировано изображениями в виде условных блок-схем, где:
- на фиг. 1 – общая схема системы мониторинга состояния подвижной единицы железнодорожного состава, содержащая:
1 – Mb – мобильную часть, в свою очередь содержащую:
– Fi- – функциональные датчики-преобразователи;
– Сinf – центральный бортовой блок сбора и обработки информации;
– Mst – стационарную часть, в свою очередь содержащую:
– Bpt – производственно-технологический блок;
– Kcontr – контрольно-настроечный блок;
– Pst – стационарные контрольно-функциональные посты;
– Pmob – переносные контрольно-функциональные посты;
– Srv – телематический сервер.
- на фиг. 2 – Fi- – функциональный датчик-преобразователь 1.1, общая схема, в свою очередь содержащий:
1.1.1 – F-i: (m; s; l; t; a; p), – первичные функциональные датчики, которые могут быть выполнены в виде:
F-m – датчиков-преобразователей веса;
F-s – датчиков-преобразователей деформации;
F-l – датчиков-преобразователей перемещений;
F-t – датчиков-преобразователей температуры;
F-a – датчиков-преобразователей ускорений;
F-p – датчика-преобразователь давления.
1.1.2 – Finf – функциональный блок обработки информации;
1.1.3 – Frad – приёмопередатчик канала L-in внутренней связи;
1.1.4 – Fmem – блок хранения данных (память);
1.1.5 – Finn – блок идентификации;
1.1.6 – Fp – блок питания;
1.1.7 – Fcontr – блок самодиагностики.
- на фиг. 3 – 1.2 Сinf – центральный бортовой блок сбора и обработки информации общая схема, в свою очередь содержащий:
1.2.1 – Cd, – блок обработки данных;
1.2.2 – Сinn – блок идентификации подвижной единицы железнодорожного состава;
1.2.3 – Ср – блок питания;
1.2.4 – Сgps – блок-датчиком географического положения;
1.2.5 – Сmem – блок хранения данных (памяти);
1.2.6 – Crad(in) – приёмопередатчик канала L-in внутренней связи;
1.2.7 – Crad(out) – приёмопередатчик канала L-out (GSM) внешней связи;
1.2.8 – Crad(out) – приёмопередатчик канала L-out (Wi-Fi) внешней связи;
1.2.9 – Ccontr – блок самодиагностики.
- на фиг. 4 – Bpt – производственно-технологический блок 2.1 (пост градуировки), общая схема, в свою очередь содержащий:
2.1.1 – Bpt(rad)(out) – приёмопередатчик канала L-out (GSM) внешней связи;
2.1.2 – Bpt(rad)(in) – приёмопередатчик канала L-in (Wi-Fi);
2.1.3 – Bpt(i) – блок калибровки датчиков-преобразователей;
2.1.3.1 – Bpt(m) – блок калибровки датчиков-преобразователей F-m веса;
2.1.3.2 – Bpt(s) –блок калибровки датчиков-преобразователей F-s деформации;
2.1.3.3 – Bpt(l) – блок калибровки датчиков-преобразователей F-l перемещений;
2.1.3.4 – Bpt(t) – блок калибровки датчиков-преобразователей F-t температуры;
2.1.3.5 – Bpt – блок калибровки датчиков-преобразователей F-a ускорений;
2.1.3.6 – Bpt(p) – блок калибровки датчиков-преобразователей F-p давления.
- на фиг. 5 – Kcontr – контрольно-настроечный блок 2.2, общая схема, в свою очередь содержащая:
2.2.1 – Kcontr (inn) – блок введения индивидуального идентификационного номера подвижной единицы железнодорожного состава;
2.2.2 – Kcontr (p) – блок мониторинга состояния блоков питания (зарядки аккумуляторов элементов) системы мониторинга;
2.2.3 – Kcontr (progr) – блок загрузки и инсталляции программного обеспечения;
2.2.4 – Kcontr (GSM) – блок настройки устройств внешних L-out каналов радиосвязи;
2.2.5 – Kcontr (Wi-Fi) – блок настройки устройств внутренних L-in каналов радиосвязи;
2.2.6 – Kcontr (GPS) – блок настройки устройств GPS.
2.2.7 – Kcontr (rad)(out) – приёмопередатчик канала L-out (GSM, Wi-Fi) внешней связи;
2.2.8 – Kcontr (rad) (in) – приёмопередатчик канала L-in (Wi-Fi) внутренней связи.
Система мониторинга состояния подвижной единицы железнодорожного состава работает следующим образом.
Работоспособность предлагаемой системы мониторинга состояния подвижной единицы железнодорожного состава обеспечивается взаимодействием мобильной части 1 (Mb) и стационарной части 2 (Mst) системы (Фиг. 1).
Мобильную часть системы 1 (Mb) размещают на подвижной единице железнодорожного состава, при этом в качестве подвижной единицы может служить грузовой вагона, вагон-цистерна, вагон-хоппер и т.п.
В зависимости от типа используемой для мониторинга подвижной единицы выбирают и соответствующие составляющие элементы системы.
Так для мониторинга вагона-цистерны, используемой для перевозки нефтепродуктов, могут быть использованы датчики температуры окружающего воздуха, датчики температуры груза, датчики давления во внутренней полости цистерны, инерционные датчики, контролирующие перемещение груза в цистерне при разогреве смёрзшегося мазута, нефти и т.п.
Для грузового полувагона вагона, предназначенного для перевозки сыпучих грузов, могут быть использованы датчики положения полувагона в пространстве, например, при перевозке угля и разгрузке полувагона на вагоноопрокидывателе, датчики веса перевозимого груза и т.п.
Для крытого вагона в качестве датчиков могут быть использованы, например, датчики контроля закрытия-открытия раздвижных створок дверей в боковых стенках кузова для мониторинга несанкционированного проникновения в крытый вагона.
В качестве общих датчиков для всех вагонов могут быть использованы датчики положения вагона на местности, датчики динамических нагрузок для контроля ускорений вагона на сортировочных горках, для контроля состояния поверхности катания колёсных пар, датчики состояния буксовых подшипников, в том числе температуры буксовых узлов, датчики прогиба элементов кузова, датчики прогиба надрессорной балки ходовой тележки, датчики перекоса кузова и т.п.
В качестве источников первичной информации по указанным параметрам в системе предусмотрены функциональные датчики преобразователи 1.1 (Fi) (Фиг. 2), которые могут быть выполнены в качестве, например, F-m – датчиков-преобразователей веса, F-s – датчиков-преобразователей деформации, F-l – датчиков-преобразователей перемещений, F-t – датчиков-преобразователей температуры, F-a – датчиков-преобразователей ускорений, F-p – датчика-преобразователь давления, либо любые другие датчики преобразователи, например, датчики-преобразователи радиоактивного излучения – при перевозке радиоактивных материалов – датчики наличия химических элементов – при утечке химически активных, ядовитых материалов.
Предлагаемое изобретение предусматривает различные варианты реализации схемных и функциональных решений. Назначение и возможность системы определяется номенклатурой и назначением используемых функциональных датчиков-преобразователей 1.1 (Fi). Например, помимо определения с помощью датчиков-преобразователей F-m веса кузова и веса перевозимого груза, в случае использования нескольких таких датчиков, возможно измерение боковой и продольной неравномерностей загрузки вагона. С помощью нескольких датчиков-преобразователей ускорений F-a возможно проведение мониторинга состояния колёсных пар.
Для приведения системы в работоспособное состояние производят загрузку программного обеспечения, его инсталляцию, калибровку, настройку элементов системы, настройку системы в целом, контроль работоспособности как отдельных элементов системы, так и всей системы в целом.
Для этого используют контрольно-настроечный блок 2.2 (Kcontr) (Фиг. 3, 4, 5), который с помощью приёмопередатчика 2.2.7 (Kcontr (rad)(out)) канала L-out (GSM) внешней связи, или с помощью 2.2.8 (Kcontr (rad) (in)) канала L-in (Wi-Fi) внутренней связи, либо по кабелю связи, через приёмопередатчик 1.2.7 (Crad(out)) канала L-out (GSM) внешней связи, или приёмопередатчик 1.2.8 (Crad(out)) канала L-out (Wi-Fi) внешней связи подключают к центральному бортовому блоку сбора и обработки информации 1.2 (Сinf).
Через центральный бортовой блок сбора и обработки информации 1.2 (Сinf) и с помощью блока загрузки и инсталляции программного обеспечения 2.2.3 (Kcontr (progr)), блока 2.2.6 (Kcontr (GPS)) настройки устройств GPS; блока 2.2.4 (Kcontr (GSM)) настройки устройств внешних L-out каналов радиосвязи, блока 2.2.5 (Kcontr (Wi-Fi)) настройки устройств внутренних L-in каналов радиосвязи производят загрузку и инсталляцию программного обеспечения, настройку соответствующих блоков центрального бортового блока сбора и обработки информации 1.2 (Сinf ), в том числе блок-датчик 1.2.4 (Сgps) географического положения, блок 1.2.5 (Сmem) хранения данных (памяти), приёмопередатчик 1.2.6 (Crad(in) ), приёмопередатчик 1.2.7 (Crad(out)), приёмопередатчик 1.2.8 (Crad(out)), блок 1.2.9 (Ccontr) самодиагностики. С помощью блока 2.2.2 (Kcontr (p)) мониторинга состояния блоков питания производят зарядку и контроль элементов питания 1.2.3 (Ср). С помощью блока 2.2.1 (Kcontr(inn)) вводят в блок 1.2.2 (Сinn) идентификации номер подвижной единицы железнодорожного состава.
Затем с помощью блока 2.1.3 (Bpt(i)) калибровки датчиков-преобразователей производственно-технологического блока 2.1 (Bpt ) (пост градуировки) производят калибровку соответствующих датчиков преобразователей: блоком 2.1.3.1(Bpt(m)) – датчиков-преобразователей F-m веса; блоком 2.1.3.2 (Bpt(s)) датчиков-преобразователей F s деформации; блоком 2.1.3.3 (Bpt(l)) – датчиков-преобразователей F-l перемещений; блоком 2.1.3.4 (Bpt(t)) – датчиков-преобразователей F-t температуры; блоком 2.1.3.5 (Bpt) калибровки датчиков-преобразователей F-a ускорений; блоком 2.1.3.6 (Bpt(p)) калибровки датчиков-преобразователей F-p давления. При этом связь производственно-технологического блока 2.1 (Bpt) с – центральным бортовым блоком 1.2 (Сinf) сбора и обработки информации осуществляют через приёмопередатчик 2.1.1 (Bpt(rad)(out)) канала L-out (GSM) внешней связи, либо через приёмопередатчик 2.1.2 (Bpt(rad)(in)) канала L in (Wi-Fi), либо с помощью кабельной связи.
Калибровку производят путём приложения контрольных калиброванных воздействий на соответствующие функциональные датчики-преобразователи 1.1 (Fi).
В качестве таких контрольных калиброванных воздействий могут быть контрольные веса для калибровки датчиков-преобразователей веса F-m, датчиков-преобразователей деформации F-s, температурные контрольно калиброванные воздействий для датчиков-преобразователей F-t температуры и т.п.
После этого система мониторинга состояния подвижной единицы железнодорожного состава готова к использованию.
В стационарную часть 2 (Mst) системы, кроме описанных элементов, также входят телематический сервер 2.5 (Srv), предназначенный для сбора, обработки, хранения, маршрутизации и обмена информации между мобильной части 1 (Mb) системы и стационарными контрольно-функциональными постами 2.3 (Pst), переносными контрольно-функциональными постами 2.4 (Pmob).
Предлагаемая система позволяет производить непрерывный либо выборочный, производимый по запросу оператора-пользователя, контроль за выбранными параметрами состояния подвижной единицы железнодорожного состава. При своём использовании подвижная единицы железнодорожного состава подвергается различным внешним воздействиям, зависящим от условий эксплуатации и состояния внешней среды. Источниками первоначальной информации о таких воздействиях являются соответствующие первичные функциональные датчики, выполненные в виде различных датчиков, например, F-m – датчиков-преобразователей веса, F-s – датчиков-преобразователей деформации, F-l – датчиков-преобразователей перемещений, F-t – датчиков-преобразователей температуры, F-a – датчиков-преобразователей ускорений, F-p – датчика-преобразователь давления, либо любых других аналогичных, имеющих различные конструкции, принципы работы и характеристики.
Полученная от указанных первичных функциональных датчиков информация, например, информация о весе перевозимого груза, температуре окружающей среды или перевозимого груза, давлении внутри цистерны, ускорении подвижной единицы или её деталей и узлов и т.п. поступает в соответствующие функциональные блоки 1.1.2 (Finf) обработки информации, где аналого-цифровым преобразователем преобразуется в цифровой вид, после чего с помощью приёмопередатчик 1.1.3 (Frad) канала Lin внутренней связи передаётся через приёмопередатчик 1.2.6 (Crad(in)) в блок 1.2.1 (Cd) обработки данных 1.2 (Сinf) центрального бортового блока сбора и обработки информации, при этом копия полученных данных размещается в соответствующий блок 1.1.4 (Fmem) хранения данных, где и находится до её востребования по запросу оператора или системы.
Информация от всех функциональных датчиков-преобразователей 1.1 (Fi) поступает в центральный бортовой блок 1.2 (Сinf) сбора и обработки информации, где обрабатывается и записывается в блок хранения данных (памяти) 1.2.5 (Сmem).
По мере необходимости по запросу стационарных 2.3 (Pst) либо по запросу переносных 2.4 (Pmob) контрольно-функциональных постов по каналам внешней связи Lout (GSM, Wi-Fi) производят подключение стационарной части 2 (Mst) к мобильной части 1 (Mb). Накопленная в центральном бортовом блоке 1.2 (Сinf) сбора и обработки информации данные по каналам внешней связи Lout (GSM, Wi-Fi) попадают на телематический сервер 2.5 (Srv), а затем на стационарные 2.3 (Pst) или переносные контрольно-функциональные посты 2.4 (Pmob).
Функциональные датчики-преобразователи 1.1.1 (Fi), выполненные в виде датчиков-преобразователей F-m веса, позволяют определять вес перевозимого груза, по показаниям нескольких датчиков определять приходящуюся на каждую тележку, сторону или колёсную пару нагрузку, определив при этом поперечный или продольный перекос кузова.
Функциональные датчики-преобразователи 1.1.1 (Fi), выполненные в виде датчиков-преобразователей F-s деформации, установленные на различных элементах подвижного железнодорожного состава, например, на кузове, на раме, на элементах автосцепного оборудования, на котлах цистерны, надрессорных балках, боковых рамах ходовых тележек по величине деформации определяют состояние и работоспособность элементов и всего подвижного железнодорожного состава.
По показаниям датчиков-преобразователей F-l перемещений определяют взаимные перемещения элементов подвижного железнодорожного состава, например, блоков самой системы, створок дверей, открытие люков, что позволяет проводить контроль несанкционированного воздействия на элементы системы и подвижного состава.
Датчики-преобразователи F-t температуры позволяют определять температуру окружающей среды, температуру перевозимого груза, контролировать в режиме реального времени ход процесса разогрева смёрзшегося груза: угля, мазута, нефти, масла. Для увеличения точности измерений с учётом изменения температуры окружающей среды и в соответствие с заложенной программой, проводить корректировку показателей функциональных датчиков-преобразователей 1.1.1 (Fi) с поправкой на изменение температуры и атмосферного давления, по показаниям датчиков-преобразователей F-p давления.
Аналогичные функциональные датчики-преобразователи F-p давления могут быть использованы для контроля давления в котлах вагонов-цистерн, в тормозной магистрали подвижной единицы железнодорожного состава. Такой мониторинг позволяет проследить процесс загрузки-разгрузки вагонов-цистерн, процессы торможения железнодорожного состава, возникновение аварийных ситуаций.
Работа функциональных датчиков-преобразователей 1.1.1 (Fi) с датчиками-преобразователями F-a ускорений позволяют получить информацию о проведении операций по сцепке-расцепке контролируемой единицы при формировании железнодорожного состава на сортировочных горках или при маневровых работах на железнодорожных станциях и полигонах.
Предлагаемая система может быть оборудована любыми другими датчиками-преобразователями, например, датчиками радиации, датчиками присутствия химически агрессивных и ядовитых веществ и т.п.
Снабжение центрального бортового блока 1.2 (Сinf) сбора и обработки информации блоком 1.2.2 (Сinn) идентификации подвижной единицы и блоком-датчиком 1.2.4 (Сgps) аппаратуры глобального позиционирования позволяет произвести идентификацию и режиме реального времени определять местоположение контролируемой единицы железнодорожного состава.
Кроме мониторинга состояния подвижной единицы железнодорожного состава предлагаемая система позволяет автоматически с помощью блоков самодиагностики 1.1.7 (Fconr), либо по запросу оператора производить диагностику работоспособности всей системы, либо её блоков с передачей результатов диагностики на телематический сервер 2.5 (Srv).
По результатам диагностики принимаются решения о внесении изменений в работу системы, например, производят дистанционную корректировку, частичную или полную переустановку программного обеспечения, вывод из эксплуатации с последующей заменой неисправных блоков.
Наличие в предлагаемой системе энергонезависимых блоков хранения данных (памяти) 1.1.4 (Fmem), 1.2.5 (Cmem)повышают надёжность системы, позволяя в случае временной потери связи с мобильной частью 1 (Mb) системы, например, при нахождении подвижной единицы в тоннелях, под мостами, в зонах неустойчивой связи, при временной неработоспособности приёмопередатчиков, обеспечить передачу накопленных в блоках хранения данных1.1.4 (Fmem), 1.2.5 (Cmem) при возобновлении работоспособности каналов связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2681275C1 |
| Система мониторинга подвижного состава и инфраструктуры железнодорожного транспорта на основе беспроводных технологий | 2022 |
|
RU2794600C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2800560C1 |
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ВИЗУАЛЬНОГО И АППАРАТНОГО МОНИТОРИНГА | 2006 |
|
RU2329543C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО МОНИТОРИНГА РАБОЧИХ ПОКАЗАТЕЛЕЙ НАВЕСНОГО ОБОРУДОВАНИЯ КОМБИНИРОВАННОЙ ДОРОЖНОЙ МАШИНЫ И СПОСОБ ЕГО РАБОТЫ | 2023 |
|
RU2807461C1 |
| Автономный пункт счета осей | 2019 |
|
RU2702374C1 |
| Стенд для проверки устройства контроля и регистрации расхода топлива на транспортном средстве с дизельным двигателем | 2023 |
|
RU2801051C1 |
| УСТРОЙСТВО КОНТРОЛЯ И РЕГИСТРАЦИИ РАСХОДА ТОПЛИВА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2012 |
|
RU2505861C1 |


Изобретение относится к средствам мониторинга состояния подвижного состава. Система содержит мобильную часть, размещённую на подвижной единице железнодорожного состава, включающую блок-датчик географического положения, функциональные датчики-преобразователи, связанные с центральным бортовым блоком сбора и обработки информации, который связан с телематическим сервером, входящим в состав стационарной части системы, содержащей стационарные и переносные контрольно-функциональные посты, для приёма от центрального бортового блока сбора и обработки информации о техническом состоянии, положении подвижной единицы. Стационарная часть также включает контрольно-настроечный блок для настройки и проверки работоспособности системы и производственно-технологический блок с блоками калибровки бортовых функциональных датчиков-преобразователей для приведения системы мониторинга в работоспособное состояние. Достигается повышение надёжности и защищённости системы. 20 з.п. ф-лы, 5 ил.
1. Система мониторинга состояния подвижной единицы железнодорожного состава, содержащая мобильную часть 1 (Mb), размещённую на подвижной единице железнодорожного состава, включающую блок-датчик 1.2.4 (Сgps) географического положения, функциональные датчики-преобразователи 1.1.1 (Fi), связанные по каналам L-in внутренней связи с центральным бортовым блоком 1.2 (Сinf) сбора и обработки информации, который, в свою очередь, по каналам L-out внешней связи связан с телематическим сервером 2.5 (Srv), входящим в состав стационарной части системы 2 (Mst), содержащей стационарные 2.3 (Pst) и переносные 2.4 (Pmob) контрольно-функциональные посты, предназначенные для приёма по каналу внешней связи L-out от центрального бортового блока 1.2 (Сinf) сбора и обработки информации подвижной единицы железнодорожного состава информации о техническом состоянии, положении подвижной единицы железнодорожного состава, система также содержит контрольно-настроечный блок 2.2 (Kcontr, ),предназначенный для настройки и проверки работоспособности системы, а также производственно-технологический блок 2.1 (Bpt) с блоками 2.1.3 (Bpt(i)) функционального калиброванного воздействия на функциональные датчики-преобразователи 1.1.1 (Fi), предназначенный для приведения системы мониторинга состояния подвижной единицы железнодорожного состава в работоспособное состояние.
2. Система по п. 1, в которой функциональные датчики-преобразователи 1.1.1 (Fi) выполнены в виде датчиков-преобразователей F-m веса.
3. Система по п. 1, в которой функциональные датчики-преобразователи 1.1.1 (Fi) выполнены в виде датчиков-преобразователей F-s деформации.
4. Система по п. 1, в которой функциональные датчики-преобразователи 1.1.1 (Fi) выполнены в виде датчиков-преобразователей F-l перемещений.
5. Система по п. 1, в которой функциональные датчики-преобразователи 1.1.1 (Fi) выполнены в виде датчиков-преобразователей F-t температуры.
6. Система по п. 1, в которой функциональные датчики-преобразователи 1.1.1 (Fi) выполнены в виде датчиков-преобразователей F-a ускорений.
7. Система по п. 1, в которой функциональные датчики-преобразователи 1.1.1(Fi) выполнены в виде датчиков-преобразователей F-p давления.
8. Система по п. 1, в которой функциональные датчики-преобразователи 1.1.1 (Fi) содержат соответствующий первичный функциональный датчик Fi: (m; s; l; t; a; p), соединённый с функциональным блоком обработки информации 1.1.2 (Finf), который по каналу L-in внутренней связи соединён приёмопередатчиком 1.1.3 (Frad(in)) с центральным бортовом блоком 1.2 (Сinf) сбора и обработки информации, который по каналам L-out (GSM) либо L-out (Wi-Fi) внешней связи связан с контрольно-настроечным блоком 2.2 (Kcontr), также функциональные датчики-преобразователи 1.1.1 (Fi) содержат блок хранения данных 1.1.4 (Fmem), блок идентификации 1.1.5 (Finn), блок питания 1.1.6 (Fp).
9. Система по п. 1, в которой центральный бортовой блок 1.2 (Сinf ) сбора и обработки информации cодержит блок обработки данных 1.2.1 (Cd), связанный с блоком 1.2.2 (Сinn) идентификации подвижной единицы железнодорожного состава, с блоком 1.2.2 (Ср) питания, с блоком-датчиком 1.2.4 (Сgps) географического положения, с блоком 1.2.5 (Сmem) хранения данных (памяти), приёмопередатчиком 1.2.6 (Crad(in)) канала L-in внутренней связи для связи с функциональными датчиками-преобразователями Fi, также блок обработки 1.2.1 (Cd) связан с приёмопередатчиком 1.2.7 (Crad(out))канала L-out (GSM) внешней связи для связи с телематическим сервером 2.5 (Srv) и с приёмопередатчиком 1.2.8 (Crad (out)) канала L-out (Wi-Fi) для связи со стационарными 2.3 (Pst) и переносным 2.4 (Pmob) контрольно-функциональными постами стационарной части 2 (Mst) системы, а также с контрольно-настроечным блоком 2.2 (Kcontr) и производственно-технологическим блоком 2.1 (Bpt).
10. Система по п. 1, в которой производственно-технологический блок 2.1 (Bpt) содержит функциональные блоки Bpt(i: m; s; l; t; a; p), соединённые с приёмопередатчиком 2.1.1 (Bbt(rad)(out)) канала L-out (GSM) внешней связи для связи с телематическим сервером 2.5 Srv, и приёмопередатчик 2.1.2 (Bbt(rad)(in)) канала L-in (Wi-Fi) внутренней связи для связи через центральный бортовой блок 1.2 (Сinf ) сбора и обработки информации подвижной единицы железнодорожного состава с функциональными датчиками-преобразователями 1.1 (Fi.).
11. Система по п. 1, в которой функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.1 (Bpt(m)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-m веса.
12. Система по п. 1, в которой функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.2 (Bpt(s)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-s деформации.
13. Система по п. 1, в которой функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.3 (Bpt(l)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-l перемещений.
14. Система по п. 1, в которой функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.4 (Bpt(t)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-t температуры.
15. Система по п. 1, в которой функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.5 (Bpt(a)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-a ускорений.
16. Система по п. 1, в которой функциональный блок 2.1.3 (Bpt(i)) производственно-технологического блока 2.1 (Bpt) выполнен в виде блока 2.1.3.5 (Bpt(p)) для функционального калиброванного воздействия (калибровки) датчиков-преобразователей F-p давления.
17. Система по п. 1, в которой контрольно-настроечный блок 2.2 (Kcontr) содержит блок 2.2.1 (Kcontr(inn)) введения индивидуального идентификационного номера подвижной единицы железнодорожного состава.
18. Система по п. 1, в которой контрольно-настроечный блок 2.2 (Kcontr), содержит блок 2.2.2 (Kcontr(p)) мониторинга состояния блока питания (зарядки аккумуляторов элементов) системы мониторинга.
19. Система по п. 1, в которой контрольно-настроечный блок 2.2 (Kcontr) содержит блок 2.2.3 (Kcontr(progr)) загрузки и инсталляции программного обеспечения системы мониторинга.
20. Система по п. 1, в которой контрольно-настроечный блок 2.2 (Kcontr) содержит блоки 2.2.4 (Kcontr(GSM)), 2.2.5 (Kcontr (Wi-Fi)) настройки устройств внешних Lout и внутренних Lin каналов радиосвязи системы мониторинга.
21. Система по любому из пп. 17–20, в которой контрольно-настроечный блок 2.2 (Kcontr) содержит приёмопередатчик 2.2.8 (Kcontr(rad)(in)) канала L-in(Wi-Fi) внутренней связи для связи с центральным бортовым блоком 1.2 (Сinf) сбора и обработки информации и через него с функциональными датчиками-преобразователями Fi, приёмопередатчик 2.2.8 (Kcontr (rad)(out)) канала L-out(GSM, Wi-Fi) внешней связи для связи с телематическим сервером 2.5 (Srv).
| СИСТЕМА ДИСТАНЦИОННОГО МОНИТОРИНГА СОСТОЯНИЯ ВАГОНОВ | 2015 |
|
RU2608206C1 |
| УСТРОЙСТВО И СПОСОБ СВЯЗИ, МОНИТОРИНГА И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ДВИЖЕНИЯ | 2005 |
|
RU2392155C2 |
| EP 2902752 A2, 05.08.2015 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 7269527 B1, 11.09.2007 | |||
| CN 204137023 U, 04.02.2015. | |||

