Изобретение относится к измерительной технике и предназначено для использования в областях, где применяются контактные датчики температуры, в частности, в океанографии.
Динамические характеристики датчиков температуры в дифференциальной форме представляются уравнениями, коэффициенты которых являются показателями тепловой инерции [ГОСТ 8.256-77 Нормирование и определение динамических характеристик аналоговых средств измерений]. Во многих случаях удовлетворительную точность дает представление датчика звеном 1-го порядка, имеющего показатель тепловой инерции при первой производной температуры датчика. Этот показатель тепловой инерции определяется при аттестации датчика.
Известные традиционные способы определения показателя тепловой инерции датчика [ГОСТ 1.00418-81 ОСИ. Метод и средства определения динамических характеристик датчиков температур газовых потоков; А.С. СССР 1446494, Кл. G01К 7/00, 1987. Способ определения показателя тепловой инерции частотных преобразователей и устройство для его осуществления. Семенистый К.С., Ркенцар Б.Я., Николишин Т.М.; А.С. СССР 146532, Кл. 01К 15/00, 1961. Способ определения показателя тепловой инерции термопреобразователей сопротивления. Светличный А.С., А.С. СССР 901851, G01К 15/00, 1982. Способ определения показателя тепловой инерции термопреобразователя. Банников А.И., Еоцуленко В.В.] предусматривают подачу на вход датчика ступенчатого воздействия, регистрации переходного процесса на выходе датчика и различные варианты обработки формы кривой переходного процесса для вычисления показателя тепловой инерции.
Ступенчатое воздействие для датчиков, работающих в жидкости, обычно формируется переносом датчика из емкости с одной температурой воды в емкость с другой температурой воды [Лавров С.А., Нечесин Е.Г., Никитин А.В., Рабинович М.В. Исследование первичных преобразователей температуры в динамическом режиме. Экспериментальные методы исследования океана. Сб. науч. тр. МГИ АН УССР. Севастополь, 1978, С. 85-90]. При этом не обеспечивается постоянство времени подачи воздействия, условий обтекания датчиков жидкостью и, следовательно, постоянство коэффициента теплообмена датчика со средой в процессе калибровки, что приводит к неконтролируемой погрешности определения показателя тепловой инерции.
Целью предлагаемого изобретения является повышение точности и упрощение процедуры калибровки.
Эта цель достигается тем, что для определения показателя тепловой инерции εх датчика используют совместно второй образцовый датчик с известным параметром тепловой инерции ε0, ступенчатое воздействие температуры подают одновременно на оба датчика, регистрируют разность Δθ(t) выходных сигналов температур первого θx(t) и второго θ0(t) датчиков, фиксируют отрезок времени tm от начального момента появления разностного сигнала Δθ(t) до момента tm наступления его максимума, определяют показатель тепловой инерции εх калибруемого датчика из численного решения уравнения
Суть предлагаемого способа поясняется эпюрами сигналов датчиков θ0(t) и θх(t) при квазиступенчатом увеличении и уменьшении температуры (фиг. 1); и эпюрами сигналов разности температур θ0(t) и θх(t) датчиков (фиг. 2) в переходных процессах.
Рассмотрим вывод приведенной выше формулы.
Если моделями датчиков с достаточной точностью являются инерционные звенья первого порядка, то при подаче на их входы ступеньки температуры θс на выходе температуры датчиков будут


представленные на фиг. 1.
Разность этих сигналов

представлена на фиг. 2.
Определим время tm достижения разностным Δθ(t) сигналом выражения (3) максимального значения.
Для этого возьмем его производную и приравняем ее нулю





Таким образом, время наступления максимума tm разницы температур двух датчиков не зависит от величины входной ступеньки θс, а зависит только от показателей тепловой инерции εх и ε0 датчиков.
Это впервые открытое авторами свойство динамики пары инерционных датчиков и лежит в основе предложенного способа определения неизвестного показателя тепловой инерции [Гайский П.В. Метод уменьшения инерционности измерителя температуры // Системы контроля окружающей среды. Севастополь: МГИ НАН Украины, 2012. Вып. 17. С. 37-42].
Для примера, при известном εх=2с и при tm=2,5с из эпюр сигналов на фиг. 1 по выражению (8) получим показатель тепловой инерции датчика εх=3с.
В результате осуществления предлагаемого способа определения показателя тепловой инерции датчиков температуры получаем повышение точности и упрощение процедуры калибровки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ | 2014 |
|
RU2549255C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ГРАНИЦ РАЗДЕЛА СРЕД | 2003 |
|
RU2250440C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ И ПОКАЗАТЕЛЕЙ ТЕРМИЧЕСКОЙ ИНЕРЦИИ ОБОЛОЧЕК КОНТАКТНОГО ДАТЧИКА ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2653165C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКОВ ЖИДКОСТЕЙ И ГАЗОВ | 2014 |
|
RU2549256C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ГАЗОВЫХ И ЖИДКИХ СРЕД | 2014 |
|
RU2548123C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТЕЧЕНИЯ | 2007 |
|
RU2369875C2 |
| СПОСОБ ГРАДУИРОВКИ РАСПРЕДЕЛЕННОГО ДАТЧИКА ТЕМПЕРАТУРЫ С ПЕРЕМЕННЫМ ПОГОННЫМ КОЭФФИЦИЕНТОМ ЧУВСТВИТЕЛЬНОСТИ | 1991 |
|
RU2049313C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЕЙ ТЕМПЕРАТУРЫ, ДАВЛЕНИЯ И ПЛОТНОСТИ В ЖИДКОСТИ | 2018 |
|
RU2682080C1 |
| Способ градуировки распределенных датчиков температуры с переменным погонным коэффициентом чувствительности | 1989 |
|
SU1682831A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549248C1 |
Изобретение предназначено для применения в океанологии и может использоваться в других областях. Сущность изобретения заключается в том, что используют анализ переходного процесса после подачи ступенчатого воздействия, при этом используют совместно два датчика, первый из них с неизвестным показателем тепловой инерции и второй образцовый с известным показателем тепловой инерции, подают ступенчатое воздействие температуры одновременно на входы двух датчиков, используют переходной процесс разности температур двух датчиков для определения момента времени наступления его максимума, регистрируют отрезок времени от начала этого переходного процесса до максимума, определяют показатель тепловой инерции первого датчика численным решением уравнения
где εх - неизвестный показатель тепловой инерции первого датчика; ε0 - известный показатель тепловой инерции второго датчика; tm - отрезок времени от начала переходного процесса разности температур первого и второго датчиков до его максимума. Технический результат - повышение точности и упрощение процедуры калибровки. 2 ил.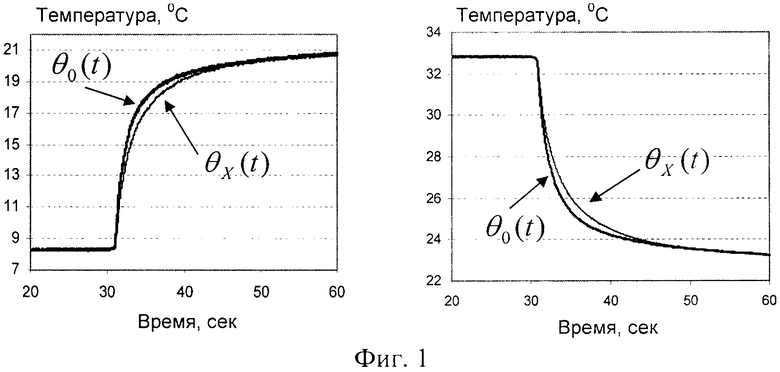
Способ определения показателя тепловой инерции датчиков температуры подачей ступенчатого воздействия и с анализом переходного процесса, отличающийся тем, что используют совместно два датчика, первый из них с неизвестным показателем тепловой инерции и второй образцовый с известным показателем тепловой инерции, подают ступенчатое воздействие температуры одновременно на входы двух датчиков, используют переходной процесс разности температур двух датчиков для определения момента времени наступления его максимума, регистрируют отрезок времени от начала этого переходного процесса до максимума, определяют показатель тепловой инерции первого датчика численным решением уравнения
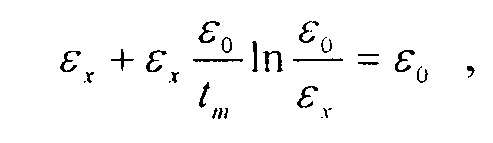
где εх - неизвестный показатель тепловой инерции первого датчика; ε0 - известный показатель тепловой инерции второго датчика; tm - отрезок времени от начала переходного процесса разности температур первого и второго датчиков до его максимума.
| Способ определения показателя тепловой инерции термопреобразователя | 1980 |
|
SU901851A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ ТЕРМИЧЕСКОЙ ИНЕРЦИИ ДАТЧИКОВ ТЕМПЕРАТУРЫ | 0 |
|
SU174813A1 |
| Устройство для измерения показателя тепловой инерции термопреобразователя | 1986 |
|
SU1408251A1 |
| Способ определения показателя тепловой инерции частотных термопреобразователей и устройство для его осуществления | 1987 |
|
SU1446494A1 |
| Способ определения показателя тепловой инерции термопреобразователя | 1983 |
|
SU1144000A1 |

