Область техники изобретения
Настоящее изобретение в целом относится к переключателям, а конкретнее, относится к бесконтактным переключателям, имеющим улучшенную активацию переключателя.
Уровень техники изобретения
Автомобильные транспортные средства обычно оборудованы различными приводимыми в действие пользователем переключателями, такими как переключатели для управления устройствами, в том числе, электрическими стеклоподъемниками, фарами, стеклоочистителями, прозрачными или полупрозрачными люками в крыше, внутренним освещением, радиоприемными и информационно-развлекательными устройствами, и различными другими устройствами. Как правило, этим типам переключателей необходимо приводиться в действие пользователем, для того чтобы вводить в действие или выводить из работы устройство или выполнить некоторый тип функции управления. Бесконтактные переключатели, такие как емкостные переключатели, применяют один или более бесконтактных датчиков для формирования поля возбуждения для считывания и считывания изменений у поля возбуждения, указывающих приведение в действие переключателя пользователем, типично, пальцем пользователя в непосредственной близости или контакте с датчиком. Емкостные переключатели типично выполнены с возможностью обнаруживать приведение в действие переключателя пользователем на основании сравнения поля возбуждения для считывания с пороговым значением.
Узлы переключателя часто применяют множество емкостных переключателей в непосредственной близости друг к другу и, как правило, требуют, чтобы пользователь выбирал одиночный требуемый емкостной переключатель для выполнения намеченной операции. Такие узлы переключателя применяют матрицу датчиков для выявления ввода в действие скользящим движением. В некоторых применениях, таких как использование в автомобиле, может быть желательно предусматривать устройство бесконтактного переключателя, которое улучшает использование бесконтактных переключателей человеком, таким как водитель транспортного средства.
Сущность изобретения
Согласно одному из аспектов настоящего изобретения, предусмотрен узел бесконтактного переключателя. Узел бесконтактного переключателя включает в себя бесконтактный датчик, содержащий первый электрод, содержащий первые пальцеобразные выступы, и второй электрод, содержащий вторые пальцеобразные выступы, при этом, первые и вторые пальцеобразные выступы являются встречно-гребенчатыми с переменным разнесением между ними вдоль первого направления. Узел бесконтактного переключателя также включает в себя схему управления, обрабатывающую сигнал в ответ на ввод в действие пользователем бесконтактного датчика, и определяющую ввод в действие скользящим движением датчика в первом направлении.
Согласно еще одному аспекту настоящего изобретения, предусмотрен узел бесконтактного переключателя. Узел бесконтактного переключателя включает в себя бесконтактный датчик, содержащий первый электрод, содержащий первые пальцеобразные выступы, и второй электрод, содержащий вторые пальцеобразные выступы, при этом, первые и вторые пальцеобразные выступы являются встречно-гребенчатыми с переменной плотностью вдоль первого направления. Узел бесконтактного переключателя также включает в себя схему управления, обрабатывающую сигнал в ответ на ввод в действие пользователем бесконтактного датчика, и определяющую ввод в действие скользящим движением датчика в первом направлении.
Согласно дополнительному аспекту настоящего изобретения, предусмотрен способ ввода в действие узла бесконтактного переключателя. Способ включает в себя этап предоставления бесконтактного датчика, содержащего первый электрод, содержащий первые пальцеобразные выступы, и второй электрод, содержащий вторые пальцеобразные выступы, из условия чтобы первые и вторые пальцеобразные выступы были встречно-гребенчатыми с меняющейся плотностью вдоль первого направления. Способ также включает в себя этапы обработки сигнала в ответ на ввод в действие пользователем бесконтактного датчика и определения ввода в действие скользящим движением бесконтактного датчика в первом направлении на основании обработанного сигнала.
Эти и другие аспекты, цели и признаки настоящего изобретения будут поняты и оценены по достоинству специалистами в данной области техники по изучению следующего описания изобретения, формулы изобретения и прилагаемых чертежей.
Предлагается узел бесконтактного переключателя, содержащий бесконтактный датчик, содержащий первый электрод, содержащий первые пальцеобразные выступы, и второй электрод, содержащий вторые пальцеобразные выступы, при этом, первый и второй пальцеобразные выступы являются встречно-гребенчатыми с переменным разнесением между ними вдоль первого направления; и схему управления, обрабатывающую сигнал в ответ на ввод в действие пользователем бесконтактного датчика, и определяющую ввод в действие скользящим движением датчика в первом направлении. Причем первые пальцеобразные выступы продолжаются наружу под отличающимися углами. Причем первое и второе множество пальцеобразных выступов являются встречно-гребенчатыми с переменной плотностью вдоль первого направления. Причем схема управления дополнительно определяет ввод в действие скользящим движением датчика во втором направлении. Причем второе направление перпендикулярно первому направлению. Узел может дополнительно содержать третий электрод, содержащий третье множество пальцеобразных выступов, встречно-гребенчатых с некоторыми из первого множества пальцеобразных выступов первого электрода, при этом, второй электрод и третий электрод обрабатываются для определения скользящего движения во втором направлении. Причем схема управления дополнительно определяет ввод в действие скользящим движением вдоль третьего направления между первым и вторым направлениями. Причем схема управления дополнительно определяет ввод в действие легким ударом на основании обработанного сигнала. Узел может дополнительно содержать схему управления, контролирующую поле возбуждения, ассоциативно связанное с бесконтактным датчиком и определяющую активацию бесконтактного переключателя на основании нарастания и спада сигнала относительно пикового значения. Узел бесконтактного переключателя дополнительно содержит емкостной переключатель, содержащий один или более емкостных датчиков. Причем узел может быть установлен в транспортном средстве.
Также предлагается узел бесконтактного переключателя, содержащий бесконтактный датчик, содержащий первый электрод, содержащий первые пальцеобразные выступы, и второй электрод, содержащий вторые пальцеобразные выступы, при этом, первые и вторые пальцеобразные выступы являются встречно-гребенчатыми с переменной плотностью вдоль первого направления; и схему управления, обрабатывающую сигнал в ответ на ввод в действие пользователем бесконтактного датчика, и определяющую ввод в действие скользящим движением датчика в первом направлении. Причем первые пальцеобразные выступы продолжаются наружу под отличающимися углами. Первые и вторые пальцеобразные выступы являются встречно-гребенчатыми с переменным разнесением между ними вдоль первого направления. Причем схема управления дополнительно определяет ввод в действие скользящим движением датчика во втором направлении. Второе направление может быть перпендикулярно первому направлению. Узел дополнительно содержит третий электрод, содержащий третье множество пальцеобразных выступов, встречно-гребенчатых с некоторыми из первого множества пальцеобразных выступов первого электрода, при этом, второй электрод и третий электрод обрабатываются для определения скользящего движения во втором направлении. Причем схема управления дополнительно определяет ввод в действие скользящим движением вдоль третьего направления между первым и вторым направлениями. Узел может дополнительно содержать схему управления, контролирующую поле возбуждения, ассоциативно связанное с бесконтактным датчиком, и определяющую активацию бесконтактного переключателя на основании нарастания и спада сигнала относительно пикового значения.
А также предлагается способ ввода в действие узла бесконтактного переключателя, состоящий в том, что предоставляют бесконтактный датчик, содержащий первый электрод, содержащий первые пальцеобразные выступы, и второй электрод, содержащий вторые пальцеобразные выступы, из условия, чтобы первые и вторые пальцеобразные выступы были встречно-гребенчатыми с меняющейся плотностью вдоль первого направления; обрабатывают сигнал в ответ на ввод в действие пользователем бесконтактного датчика; и определяют ввод в действие скользящим движением бесконтактного датчика в первом направлении на основании обработанного сигнала.
Краткое описание чертежей
На чертежах:
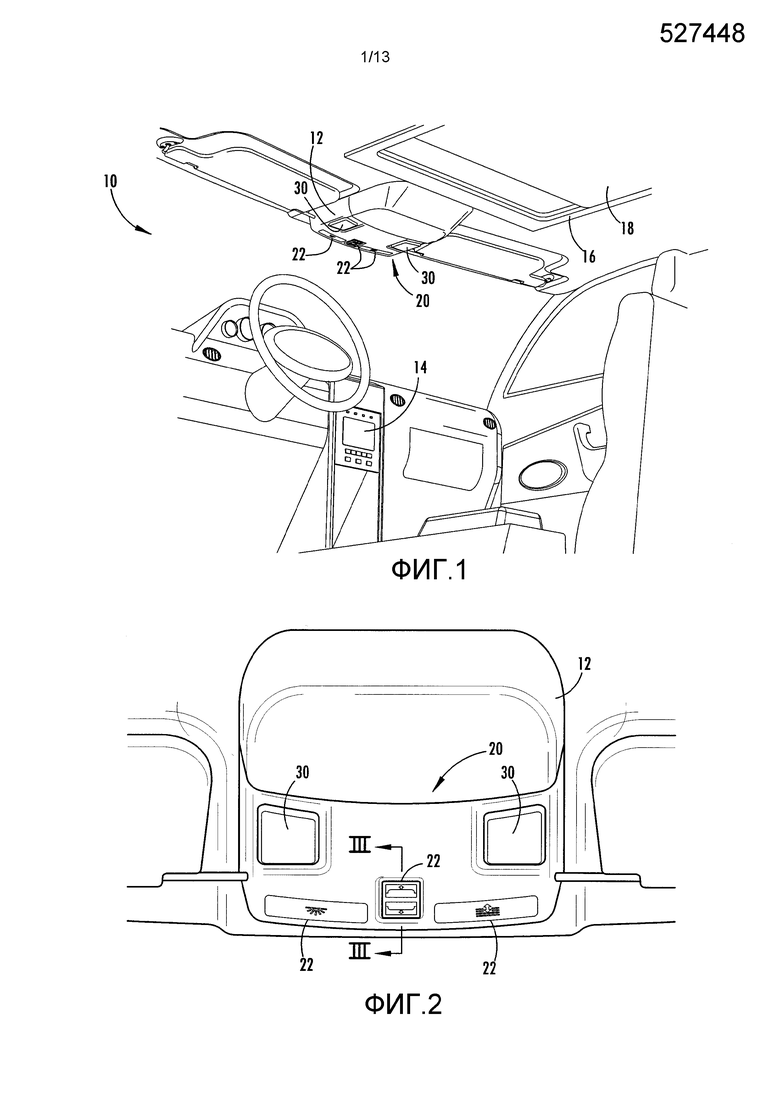
фиг. 1 - вид в перспективе пассажирского отделения автомобильного транспортного средства, имеющего консоль над ветровым стеклом, применяющую узел бесконтактного переключателя, согласно одному из вариантов осуществления;
фиг. 2 - увеличенный вид консоли над ветровым стеклом и узла бесконтактного переключателя, показанного на фиг. 1;
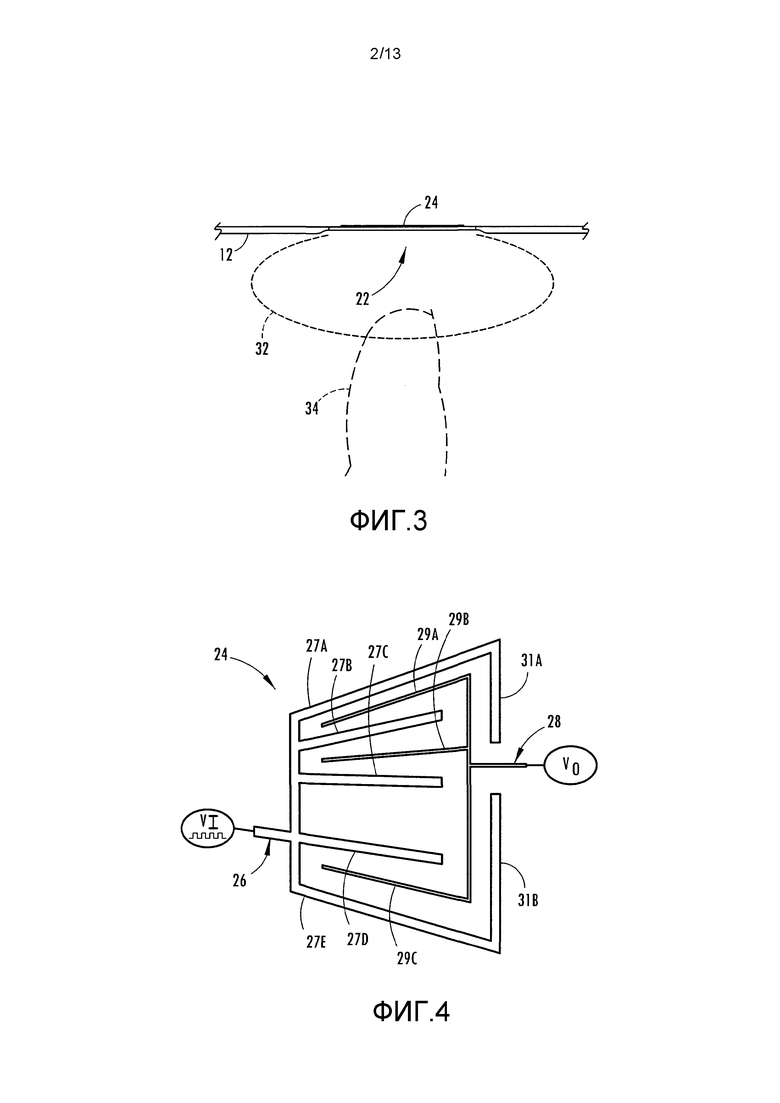
фиг. 3 - увеличенный вид в поперечном разрезе, взятый по линии III-III на фиг. 2, показывающий бесконтактный переключатель относительно пальца пользователя;
фиг. 4 - принципиальная схема емкостного датчика, применяемого в каждом из емкостных переключателей, показанных на фиг. 3, согласно одному из вариантов осуществления;
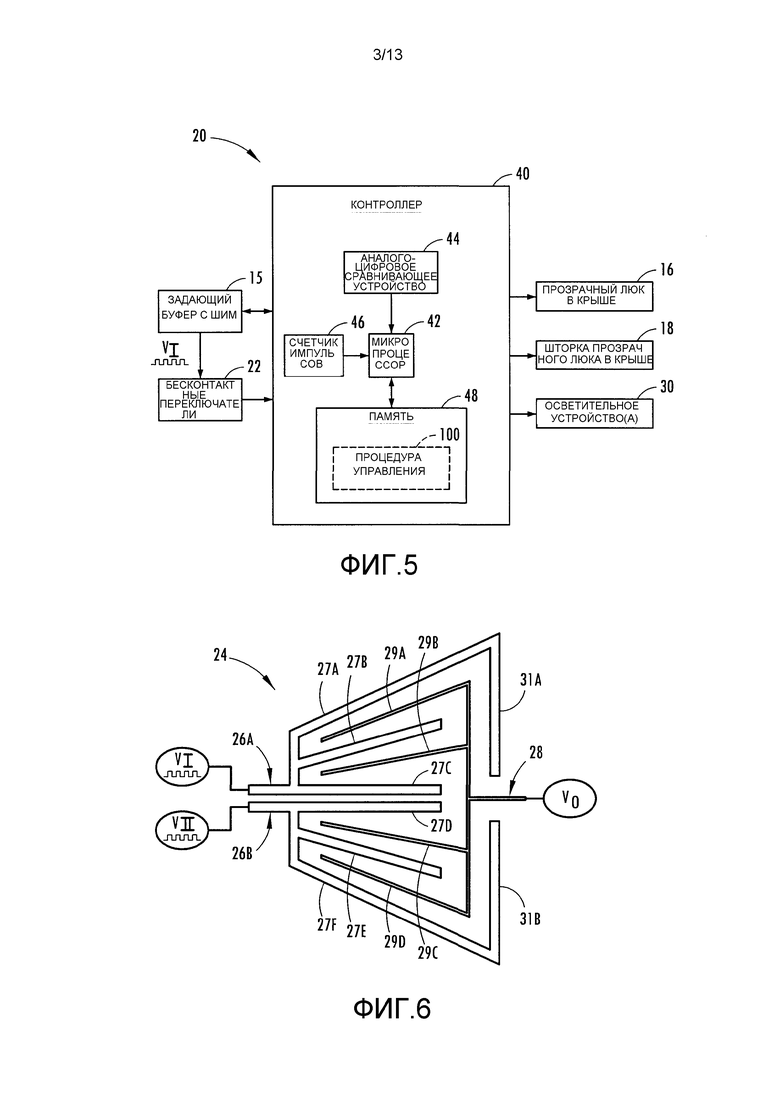
фиг. 5 - структурная схема, иллюстрирующая узел бесконтактного переключателя, согласно одному из вариантов осуществления;
фиг. 6 - принципиальная схема емкостного датчика, применяемого в емкостном переключателе, согласно первому варианту осуществления;
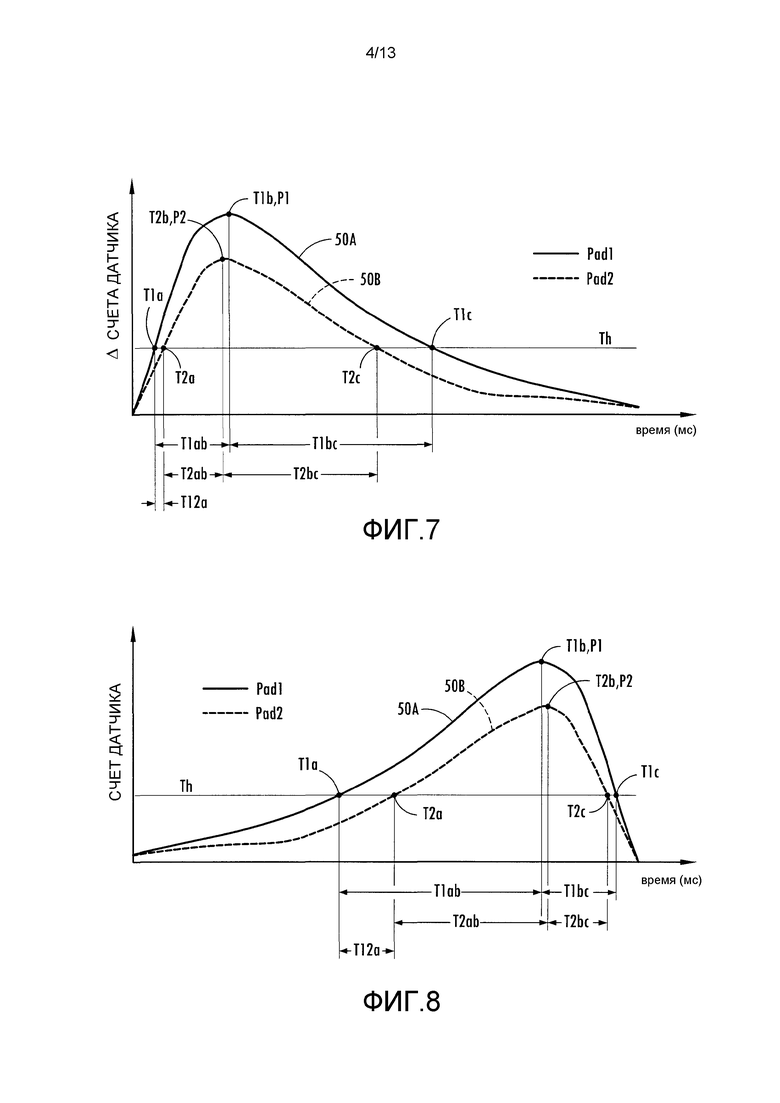
фиг. 7 - график, иллюстрирующий Δ (дельту) счета датчика для сигнала, ассоциативно связанного с емкостным датчиком по фиг. 6, во время горизонтального взмаха слева направо;
фиг. 8 - график, иллюстрирующий Δ счета датчика для сигнала, ассоциативно связанного с емкостным датчиком, показанным на фиг. 6, для горизонтального взмаха справа налево;
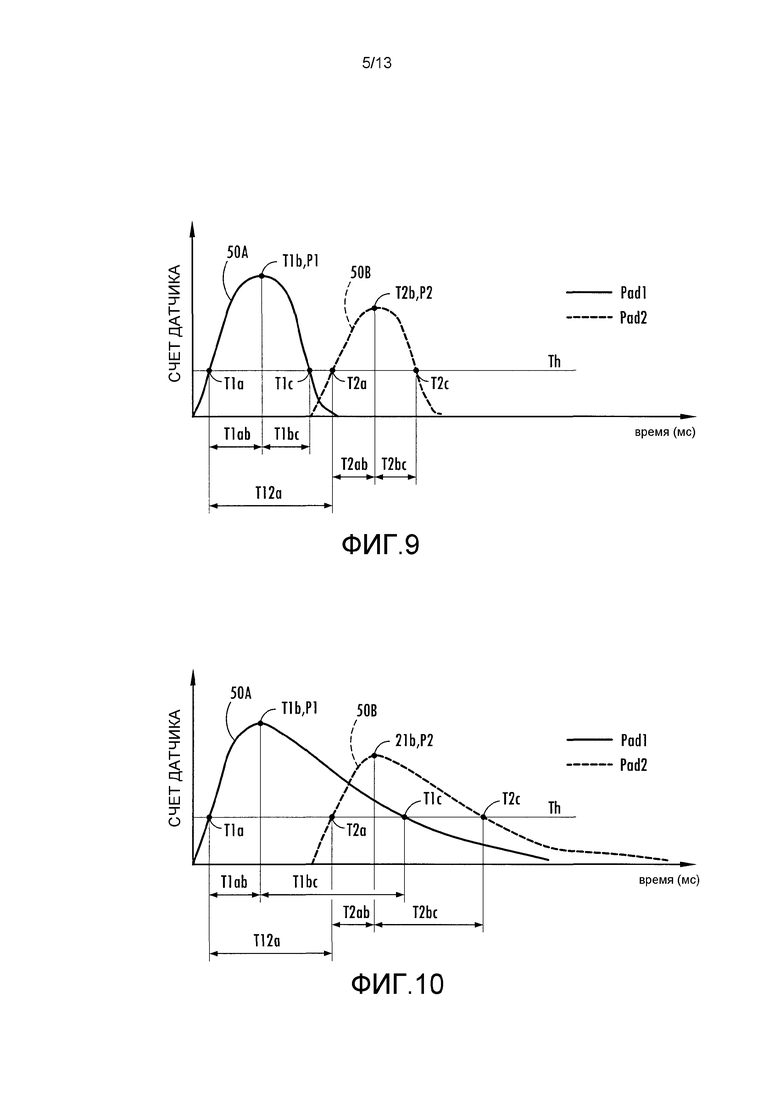
фиг. 9 - график, иллюстрирующий Δ счета датчика для сигнала, ассоциативно связанного с емкостным датчиком, показанным на фиг. 6, для вертикального взмаха сверху вниз;
фиг. 10 - график, иллюстрирующий Δ счета датчика для сигнала, ассоциативно связанного с емкостным датчиком по фиг. 6, показывающий диагональный взмах сверху слева направо вниз;
фиг. 11 - блок-схема последовательности операций способа, иллюстрирующая процедуру для обработки и определения ввода в действие узла переключателя, применяющего датчик, показанный на фиг. 6;
фиг. 12 - блок-схема последовательности операций способа, иллюстрирующая подпрограмму обработки временных характеристик Pad2 (площадки 2) в процедуре по фиг. 11;
фиг. 13 - блок-схема последовательности операций способа, иллюстрирующая подпрограмму обработки временных характеристик Pad1 (площадки 1) в процедуре по фиг. 11;
фиг. 14 - блок-схема последовательности операций способа, иллюстрирующая подпрограмму обработки перехода с Pad1 на Pad2 в процедуре по фиг. 11;
фиг. 15 - блок-схема последовательности операций способа, иллюстрирующая подпрограмму обработки Pad1 в процедуре по фиг. 11;
фиг. 16 - блок-схема последовательности операций способа, иллюстрирующая подпрограмму обработки Pad2 в процедуре по фиг. 11;
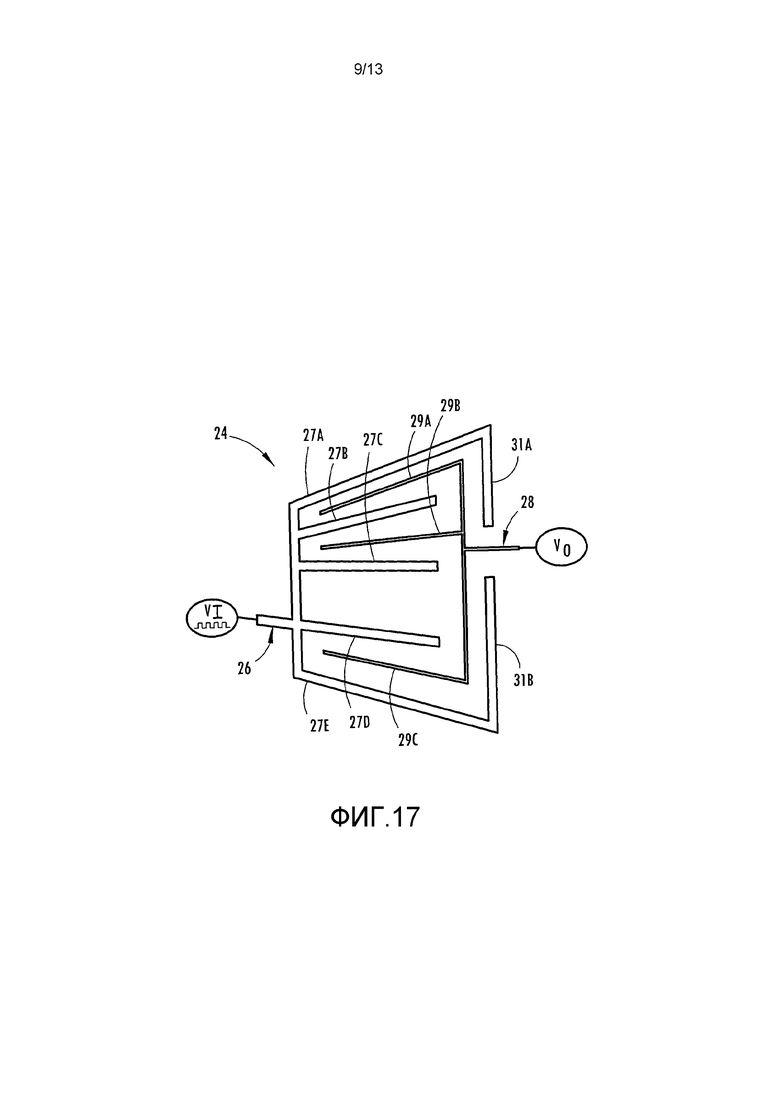
фиг. 17 - принципиальная схема емкостного датчика, применяющего бесконтактный переключатель, согласно второму варианту осуществления;
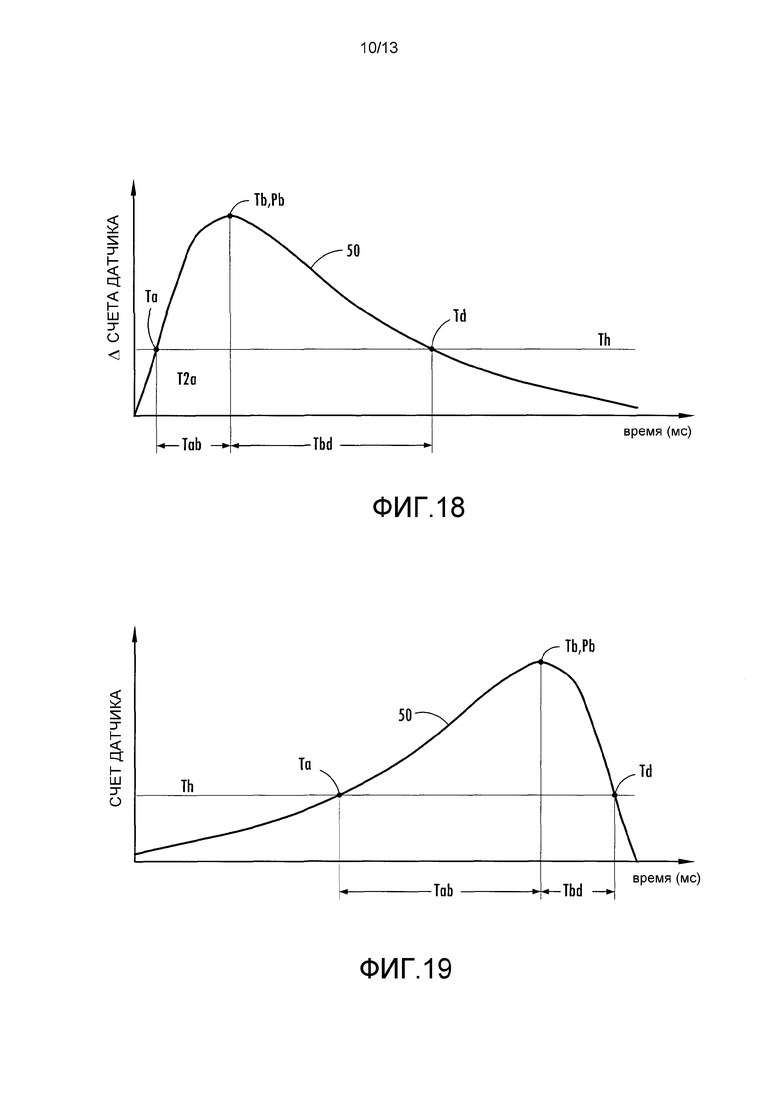
фиг. 18 - график, иллюстрирующий Δ счета датчика для сигнала, ассоциативно связанного с емкостным датчиком, показанным на фиг. 17, для горизонтального взмаха слева направо;
фиг. 19 - график, иллюстрирующий Δ счета датчика для сигнала, ассоциативно связанного с емкостным датчиком, показанным на фиг. 17, для горизонтального взмаха справа налево;
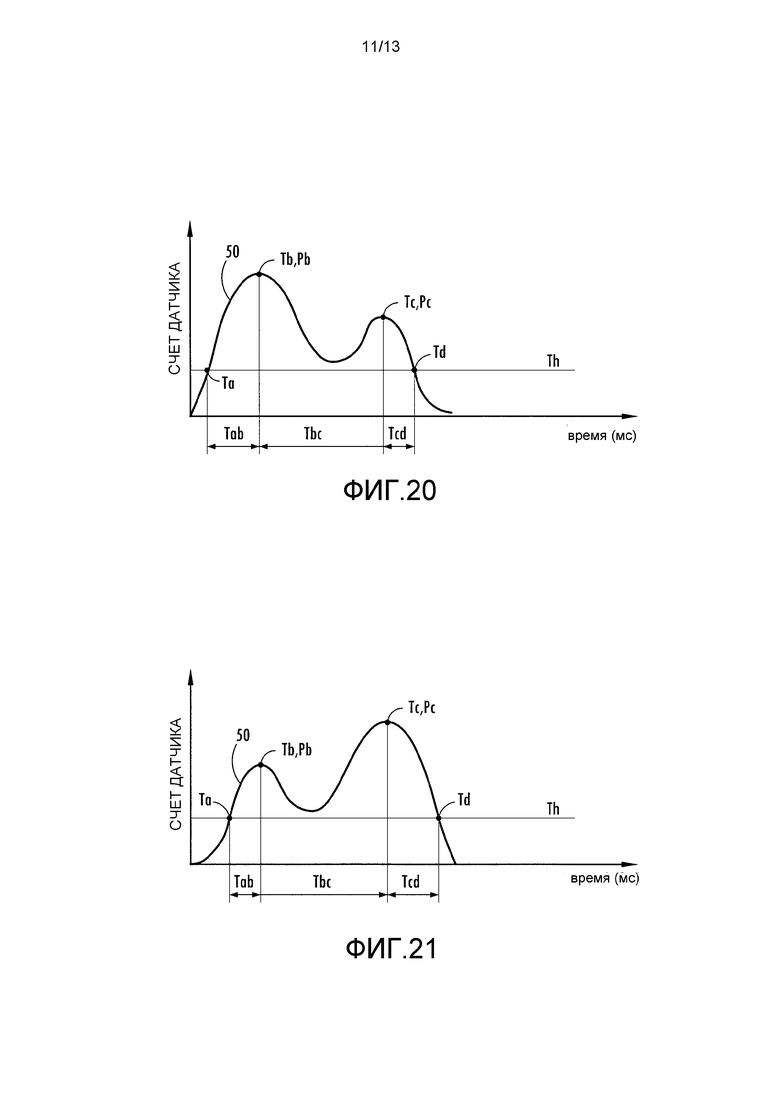
фиг. 20 - график, иллюстрирующий Δ счета датчика для сигнала, ассоциативно связанного с емкостным датчиком, показанным на фиг. 17, для вертикального взмаха сверху вниз;
фиг. 21 - график, иллюстрирующий Δ счета датчика для сигнала, ассоциативно связанного с емкостным датчиком, показанным на фиг. 17, для вертикального взмаха снизу вверх;
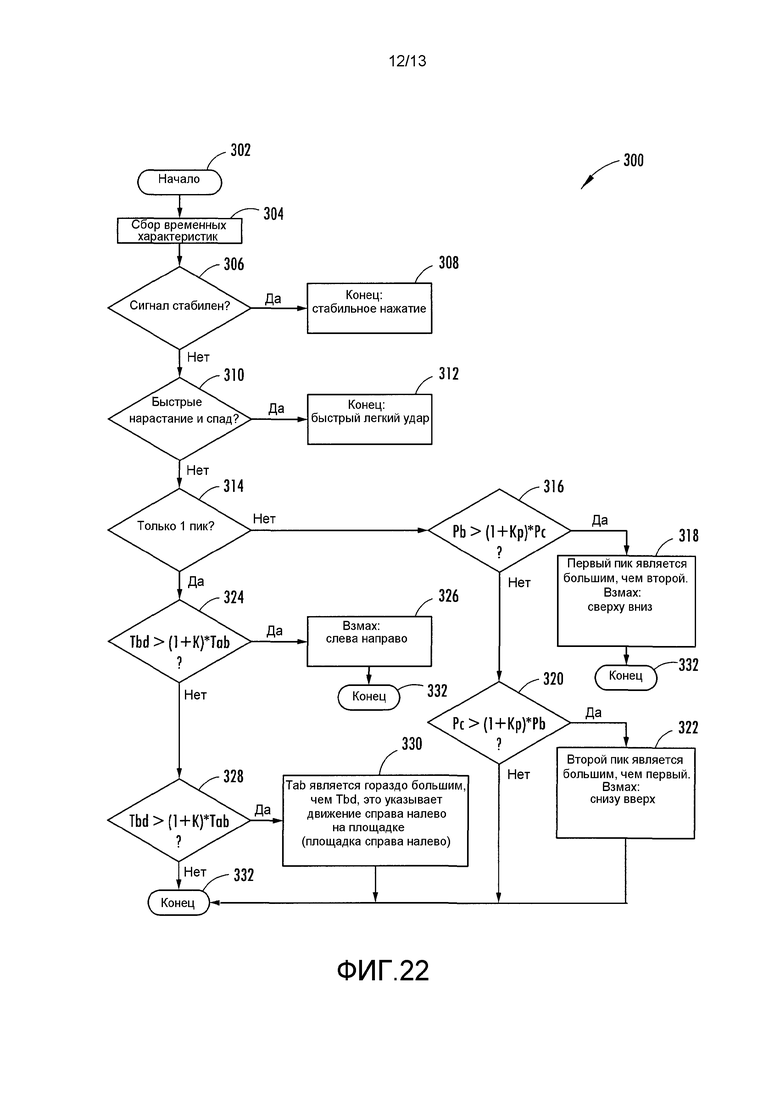
фиг. 22 - блок-схема последовательности операций способа, иллюстрирующая процедуру для обработки и ввода в действие емкостного переключателя, применяющего датчик по фиг. 17; и
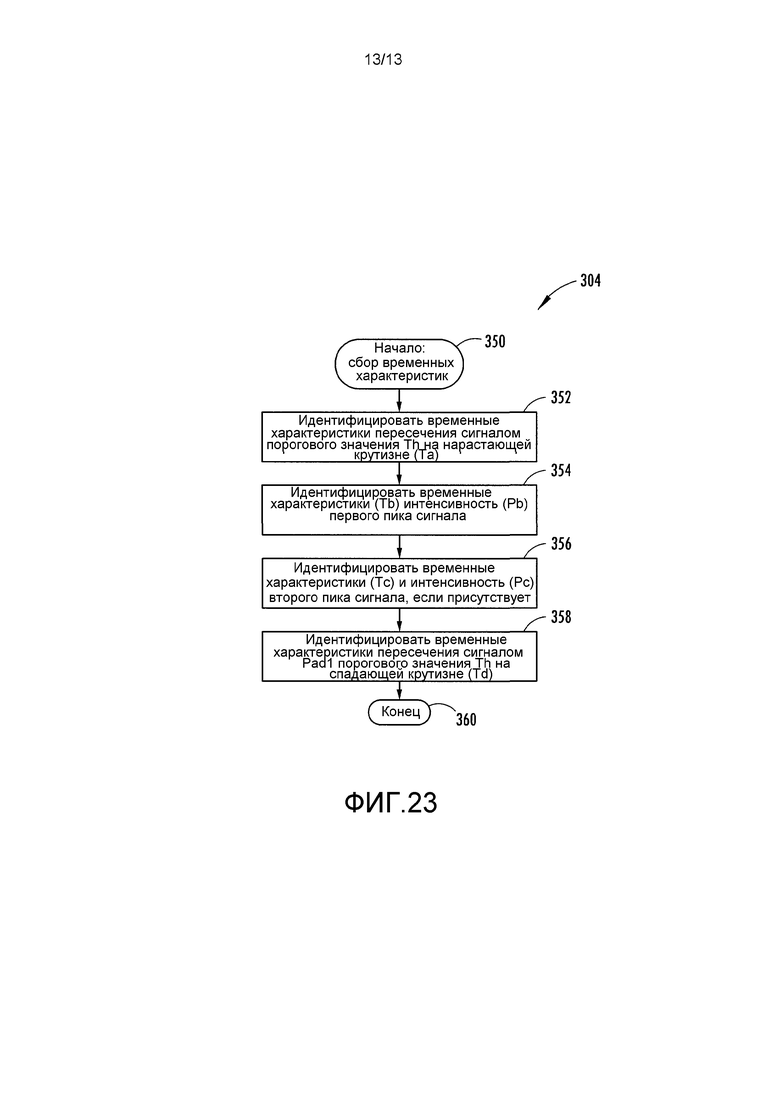
фиг. 23 - блок-схема последовательности операций способа, иллюстрирующая подпрограмму сбора временных характеристик в процедуре по фиг. 22.
Подробное описание предпочтительных вариантов осуществления
Как требуется, в материалах настоящей заявки раскрыты детализированные варианты осуществления настоящего изобретения; однако, должно быть понятно, что раскрытые варианты осуществления являются всего лишь примером изобретения, которое может быть воплощено в различных и альтернативных формах. Фигуры не обязательно предназначены для детального проектирования; некоторые схемы могут быть преувеличены или минимизированы, чтобы показывать общее функциональное представление. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения.
Со ссылкой на фиг. 1 и 2, в целом проиллюстрирована внутренняя часть автомобильного транспортного средства 10, имеющего пассажирское отделение и узел 20 бесконтактного переключателя, применяющий множество бесконтактных переключателей 22, имеющих контроль и определение ввода в действие переключателя согласно одному из вариантов осуществления. Транспортное средство 10, как правило, включает в себя консоль 12 над ветровым стеклом, смонтированную на обивку потолка на нижней стороне крыши или потолка в верхней части пассажирского отделения транспортного средства, в целом выше передней пассажирской посадочной зоны. Узел 20 переключателя имеет множество бесконтактных переключателей 22, скомпонованных в консоли 12 над ветровым стеклом, согласно показанному варианту осуществления. Однако, должно быть принято во внимание, что один или более бесконтактных переключателей 22 могут использоваться в узле 20 переключателя. Различные бесконтактные переключатели 22 могут управлять любым из некоторого количества устройств и функций транспортного средства, таких как управление перемещением полупрозрачного или прозрачного люка 16 в крыше, управление перемещением шторки 18 люка в крыше, управление вводом в действие одного или более осветительных устройств, таких как внутренние плафоны для освещения карты/чтения и потолочный плафон 30, и различные другие устройства и функции, расположенные на или вне транспортного средства. Однако, должно быть принято во внимание, что бесконтактные переключатели 22 могут быть расположены где угодно в транспортном средстве 10, к примеру, на приборной панели, на других консолях, таких как центральная консоль, встроены в дисплей 14 с сенсорным экраном для радиовещательной или информационно-развлекательной системы, такой как дисплей навигационной и/или аудиосистемы, или расположены где угодно на борту транспортного средства 10 согласно различным применениям транспортного средства.
Бесконтактные переключатели 22 показаны и описаны в материалах настоящей заявки в качестве емкостных переключателей согласно одному из вариантов осуществления. Каждый бесконтактный переключатель 22 включает в себя по меньшей мере один бесконтактный датчик, который выдает поле возбуждения для считывания, чтобы считывать прикосновение или непосредственную близость (например, в пределах одного миллиметра) пользователя к одному или более бесконтактных датчиков, такие как легкий удар, стабильное нажатие или проводящее движение пальцем пользователя. Таким образом, поле возбуждения для считывания каждого бесконтактного переключателя 22 является емкостным полем в примерном варианте осуществления, и палец пользователя имеет удельную электропроводность и диэлектрические свойства, которые вызывают изменение или возмущение поля возбуждения для считывания, как должно быть очевидно специалистам в данной области техники. Однако, специалистами в данной области техники также должно быть принято во внимание, что могут использоваться дополнительные или альтернативные типы бесконтактных датчиков, такие как, но не в качестве ограничения, индуктивные датчики, оптические датчики, датчики температуры, резистивные датчики, и тому подобное, или их комбинация. Примерные бесконтактные датчики описаны в Руководстве по проектированию датчиков касания ATMEL® от 9 апреля 2009 года, 10620 D-AT42-04/09, полная справка таким образом включена в материалы настоящей заявки посредством ссылки.
Бесконтактные переключатели 22, показанные на фиг. 1 и 2, каждый предусматривает управление одним или более компонентов или устройств транспортного средства или обеспечивает одну или более назначенных функций управления. Один или более из бесконтактных переключателей 22 могут быть выделены под управление перемещением полупрозрачного или прозрачного люка 16 в крыше, с тем чтобы заставлять прозрачный люк 16 в крыше перемещаться в направлении открывания или закрывания, наклонять прозрачный люк в крыше или останавливать перемещение прозрачного люка в крыше на основании алгоритма управления. Один или более других бесконтактных переключателей 22 могут быть выделены под управление перемещением шторки 18 прозрачного люка в крыше между открытым и закрытым положениями. Каждый из прозрачного люка 16 в крыше и шторки 16 могут приводиться в действие электродвигателем в ответ на приведение в действие соответствующего бесконтактного переключателя 22. Другие бесконтактные переключатели 22 могут быть выделены под управление другими устройствами, такое как включение внутреннего плафона для освещения карты/чтения, выключение плафона для освещения карты/чтения, включения или выключения потолочной лампы, отпирание багажника, открывание задней двери багажника или отмена действия дверного выключателя освещения. Дополнительные средства управления с помощью бесконтактных переключателей 22 могут включать в себя приведение в действие подъема и опускания электрических стеклоподъемников дверей. Различные другие средства управления транспортным средством и не транспортным средством могут управляться посредством использования бесконтактных переключателей 22, описанных в материалах настоящей заявки.
Со ссылкой на фиг. 3, проиллюстрирована часть узла 20 бесконтактного переключателя, имеющего бесконтактный переключатель 22 относительно пальца 34 пользователя во время использования узла 20 переключателя. Бесконтактный переключатель 22 может включать в себя один или более бесконтактных датчиков 24 для формирования поля возбуждения для считывания. Согласно одному из вариантов осуществления, каждый из бесконтактных датчиков 24 может быть сформирован посредством печати проводящей печатной краской на верхней поверхности полимерной консоли 12 над ветровым стеклом. Один из примеров бесконтактного датчика 24 показан на фиг. 4, как правило, имеющий задающий электрод 26 и приемный электрод 28, каждый имеет встречно-гребенчатые выступы для формирования емкостного поля 32. Должно быть принято во внимание, что каждый из бесконтактных датчиков 24 может быть сформирован иным образом, к примеру, посредством монтажа предварительно сформированной проводящей трассировки схемы на подложку согласно другим вариантам осуществления. Задающий электрод 26 принимает задающие импульсы прямоугольной волны, прикладываемые с напряжением VI. Приемный электрод 28 имеет вывод для формирования выходного напряжения VO. Должно быть принято во внимание, что задающий и приемный электроды 26 и 28 могут быть скомпонованы в различных других конфигурациях для формирования емкостного поля в качестве поля 32 возбуждения. Задающий электрод 26 включает в себя множество пальцеобразных выступов 27A-27E электрода, каждый проиллюстрирован в целом продолжающимся под разным углом относительно горизонтальной оси. Приемный электрод 28 включает в себя множество пальцеобразных выступов 27A-27E электрода, каждый подобным образом продолжается под разными углами относительно горизонтальной оси. Первое и второе множество пальцеобразных электродов 27A-27E и 29A-29C являются встречно-гребенчатыми друг относительно друга и имеют переменное или меняющееся разнесение между ними в разных местах вдоль первого направления, параллельного горизонтальной оси. Должно быть принято во внимание, что пальцеобразные выступы 27A-27E и 29A-29C задающего и приемного электродов имеют плотность, которая меняется вдоль первого направления, такого как вдоль горизонтальной оси. Расположение датчиков преимущественно предоставляет возможность для выявления ввода в действие пальцем пользователя вдоль первого направления, такого как горизонтальная ось, и второго направления, перпендикулярного первому направлению, такого как вертикальная ось. Это происходит потому, что палец пользователя взаимодействует с большим количеством пальцеобразных выступов электрода на одной стороне датчика 24 в отличие от противоположной стороны, тем самым, давая обработке сигналов датчиков возможность определять скользящее или машущее движение пальца, взаимодействующего с датчиком 24. В дополнение, диагональное скользящее движение пальца и легкий удар или стабильное нажатие пальца также могут выявляться, как описано в материалах настоящей заявки.
В варианте осуществления, показанном и описанном в материалах настоящей заявки, к задающему электроду 26 каждого бесконтактного датчика 24 прикладывается входной сигнал VI напряжения в качестве импульсов прямоугольной волны, имеющих цикл импульса заряда, достаточный для зарядки приемного электрода 28 до требуемого напряжения. Приемный электрод 28, в силу этого, служит в качестве измерительного электрода. Когда пользователь или оператор, к примеру, палец 34 пользователя проникает в поле 32 возбуждения, узел 20 бесконтактного переключателя обнаруживает возмущение, вызванное пальцем 34 в отношении поля 32 возбуждения, и определяет, является ли возмущение достаточным для ввода в действие соответствующего бесконтактного переключателя 22. Возмущение поля 32 возбуждения выявляется посредством обработки сигнала импульса заряда, ассоциативно связанного с соответствующим каналом прохождения сигнала. Каждый бесконтактный переключатель 22 имеет свой собственный выделенный канал прохождения сигнала, формирующий счеты импульсов заряда, который обрабатывается, как обсуждено в материалах настоящей заявки.
Со ссылкой на фиг. 5, проиллюстрирован узел 20 бесконтактного переключателя согласно одному из вариантов осуществления. Показано множество бесконтактных датчиков 24, выдающих входные сигналы в контроллер 40, такой как микроконтроллер. Контроллер 40 может включать в себя схему управления, такую как микропроцессор 42 и память 48. Схема управления может включать в себя схему управления считыванием, обрабатывающую поле возбуждения каждого датчика 22 для считывания ввода в действие пользователем соответствующего переключателя посредством сравнения сигнала поля возбуждения с одним или более пороговых значений в соответствии с одной или более процедур управления. Должно быть принято во внимание, что другие аналоговые и/или цифровые схемы управления могут применяться для обработки каждого поля возбуждения, определения ввода в действие пользователем и инициирования действия. Контроллер 40 может применять способ сбора данных QMatrix, имеющийся в распоряжении от ATMEL®, согласно одному из вариантов осуществления. Способ сбора данных ATMEL применяет компилятор C/C++ и отладчик WinAVR на основном компьютере WINDOWS® для упрощения разработки и испытания обслуживающей программы Hawkeye, которая предоставляет возможность контроля в реальном времени внутреннего состояния критических переменных в программном обеспечении, а также сбора журналов данных для последующей обработки.
Контроллер 40 выдает выходной сигнал в одно или более устройств, которые выполнены с возможностью выполнять специальные действия в ответ на выявленный ввод в действие бесконтактного переключателя. Например, одно или более устройств могут включать в себя прозрачный люк 16 в крыше, имеющий электродвигатель для перемещения панели прозрачного люка в крыше между открытым, закрытым и наклонным положениями, шторку 18 прозрачного люка в крыше, которая перемещается между открытым и закрытым положениями, и осветительные устройства 30, которые могут включаться и выключаться. Могут управляться другие устройства, такие как радиоприемник, для выполнения функций включения и выключения, регулирования уровня громкости, поиска каналов трансляции, и другие типы устройств для выполнения других специальных функций. Один из бесконтактных переключателей 22 может быть специализированным для приведения в движение прозрачного люка в крыше, закрываемого в ответ на взмах в первом направлении, и приведения в движение прозрачного люка в крыше, открываемого в ответ на взмах в противоположном, втором направлении, приведения в движение прозрачного люка в крыше в наклонное положение в ответ на взмах в третьем направлении, перпендикулярном первому и второму направлениям, и остановки движения прозрачного люка в крыше в ответ на слабый удар или стабильное нажатие. Шторка 18 прозрачного люка в крыше может открываться и закрываться в ответ на еще один бесконтактный переключатель 22, реагирующий на взмахи в противоположных направлениях. Электродвигатель может приводить в движение прозрачный люк в крыше или шторку в требуемое положение в ответ на тип ввода в действие.
Дополнительно показан контроллер 40, имеющий аналого-цифровое (A/D) сравнивающее устройство 44, присоединенное к микропроцессору 42. Сравнивающее устройство 44 A/D принимает выходной сигнал VO напряжения с каждого из бесконтактных датчиков 22, преобразует аналоговый сигнал в цифровой сигнал и выдает цифровой сигнал в микропроцессор 42. Дополнительно, контроллер 40 включает в себя счетчик 46 импульсов, присоединенный к микропроцессору 42. Счетчик 46 импульсов подсчитывает импульсы сигнала заряда, которые прикладываются к каждому задающему электроду каждого бесконтактного датчика, выполняет подсчет импульсов, необходимых для зарядки конденсатора до тех пор, пока выходной сигнал VO напряжения не достигает предопределенного напряжения, и выдает счет в микропроцессор 42. Счет импульсов является указывающим изменение емкости соответствующего емкостного датчика. Контроллер 40 дополнительно показан поддерживающим связь с задающим буфером 15 с широтно-импульсной модуляцией. Контроллер 40 выдает сигнал с широтно-импульсной модуляцией в задающий буфер 15 с широтно-импульсной модуляцией для формирования последовательности VI импульсов прямоугольной волны, которая прикладывается к каждому задающему электроду каждого бесконтактного датчика/переключателя 22. Контроллер 40 обрабатывает процедуру 100 управления, хранимую в памяти, чтобы контролировать и принимать решение в отношении вводов в действие одного из бесконтактных переключателей, и подает выходные сигналы управления на различные устройства транспортного средства.
Бесконтактный датчик 24 показан на фиг. 6 в качестве емкостного датчика согласно первому варианту осуществления. В этом варианте осуществления, бесконтактный датчик 24 включает в себя первый приемный электрод 28, имеющий первое множество емкостных пальцеобразных выступов 29A-29D. Первые пальцеобразные выступы 29A-29D продолжаются наружу под разными углами относительно горизонтальной оси и присоединены к сигнальному выходу VO. Емкостной датчик 24 также включает в себя второй и третий задающие электроды 26A и 26B. Второй электрод 26A включает в себя множество вторых емкостных пальцеобразных выступов 27A-27C, каждый из которых продолжается наружу под отличающимися углами относительно горизонтальной оси. Третий электрод 26B включает в себя множество емкостных пальцеобразных выступов 27D-27F, каждый из которых продолжается наружу под отличающимися углами относительно горизонтальной оси. Второй и третий электроды 26A и 26B в целом ориентированы по горизонтальной оси наряду с тем, что первый электрод 28 подобным образом в целом ориентирован по горизонтальной оси, так что пальцеобразные выступы электродов являются встречно-гребенчатыми, из условия чтобы пальцеобразные выступы на задающем электроде продолжались между и осуществляли емкостную связь с противоположными пальцеобразными выступами на приемном электроде. Второй электрод 26A дополнительно включает в себя вертикально продолжающийся внешний пальцеобразный выступ 31A, продолжающийся в целом перпендикулярно горизонтальной оси, чтобы частично окружать часть первого электрода 28. Третий электрод 26B подобным образом включает в себя вертикально продолжающийся внешний пальцеобразный выступ 26B, продолжающийся перпендикулярно горизонтальной оси, чтобы частично окружать часть первого электрода 28. В результате этой конфигурации электродов, вторые и третьи пальцеобразные выступы 27A-27F являются встречно-гребенчатыми с первыми пальцеобразными выступами 29A-29D и имеют переменную плотность вдоль первого направления, которое параллельно горизонтальной оси. По существу, по мере того, как палец пользователя скользит с правой стороны в левую сторону, как показано на фиг. 6, плотность пальцеобразных выступов электрода, взаимодействующих с пальцем, переходит с более высокой плотности на более низкую плотность, которая, при заданном размере пальца, взаимодействующего с ними, соответствует большему спаду сигнала до более низкого сигнала. Наоборот, скользящее движение пальца пользователя с правой стороны к левой стороне заставляет палец пользователя взаимодействовать с низкой плотностью емкостных пальцеобразных выступов, возрастающей до высокой плотности емкостных пальцеобразных выступов, соответствуя сигналу, который возрастает. По существу, скользящее движение или взмах пальца пользователя слева направо или справа налево может выявляться посредством обработки сигналов, вырабатываемых датчиком, и контроля скорости изменения сигналов относительно порогового и/или пикового значения для горизонтального взмаха, как описано в материалах настоящей заявки. Бесконтактный датчик 24 также может выявлять вертикальный взмах сверху вниз или снизу вверх посредством обработки сигналов, вырабатываемых на каждом из второго и третьего электродов 26A и 26B. Посредством узнавания, что палец пользователя является проходящим с верхнего, второго электрода 26A на нижний, третий электрод 26B, узел может идентифицировать взмах сверху вниз. Наоборот, посредством идентификации сигнала на нижнем, третьем электроде 26B раньше верхнего, второго электрода 26A, может идентифицироваться взмах снизу вверх. Кроме того, также может выявляться диагональный взмах между верхним левым и нижним правым, и между нижним левым и верхним правым.
На фиг. 7-10, изменение счетов импульсов заряда датчика, показанное в качестве дельты счета датчика (ΔSensorCount) для каналов прохождения сигнала, ассоциативно связанных с бесконтактным переключателем 22, применяющим бесконтактный датчик 24, показанный на фиг. 6, проиллюстрировано согласно различным примерам. Изменение счета импульса заряда датчика является разностью между инициализированным опорным значением счета без какого бы то ни было пальца или другого объекта, присутствующего в поле возбуждения, и соответствующим показанием датчика. В этих примерах, палец пользователя попадает в и взаимодействует с полем 32 возбуждения, ассоциативно связанным с бесконтактным переключателем 22, по мере того, как палец пользователя перемещается от края до края датчика 24. Канал прохождения сигнала является изменением (Δ) счета импульсов заряда датчика, ассоциативно связанного с емкостным датчиком 24. В раскрытом варианте осуществления, бесконтактные датчики 24 являются емкостными датчиками. Когда палец пользователя находится в контакте с или в непосредственной близости от датчика 24, палец изменяет емкость, измеренную соответствующим датчиком 24. Емкость находится параллельно с паразитной емкостью незатронутой площадки датчика и, по существу, измеряется в качестве смещения. Наведенная пользователем или оператором емкость пропорциональна диэлектрической постоянной пальца или другой части тела пользователя, поверхности, подвергающейся воздействию емкостной площадки, и обратно пропорциональна расстоянию конечности пользователя до кнопки переключателя. Согласно одному из вариантов осуществления, каждый датчик возбуждается последовательностью импульсов напряжения с помощью электроники широтно-импульсной модуляции (ШИМ, PWM) до тех пор, пока датчик на заряжается до установленного потенциала напряжения. Такой способ сбора данных заряжает приемный электрод 28 до известного потенциала напряжения. Цикл повторяется до тех пор, пока напряжение на измерительном конденсаторе не достигает предопределенного напряжения. Размещение пальца пользователя на поверхности касания переключателя 24 привносит внешнюю емкость, которая повышает величину заряда, передаваемого в каждом цикле, тем самым, уменьшая общее количество циклов, требуемых, чтобы измерительная емкость достигала предопределенного напряжения. Палец пользователя заставляет изменение счета импульсов заряда датчика возрастать, поскольку это значение основано на инициализированном опорном счете минус показание датчика.
Узел 20 бесконтактного переключателя способен распознавать движение руки пользователя, когда рука, в частности, палец, находится в непосредственной близости от бесконтактного переключателя 22, чтобы различать, состоит ли намерение пользователя в том, чтобы ввести в действие переключатель 22 с вводом в действие легким ударом или стабильным нажатием, или выполнить ввод в действие скользящим движением, также указываемым ссылкой как взмах. Бесконтактный датчик 24, показанный на фиг. 6, предоставляет узлу 20 бесконтактного переключателя возможность проводить различие между и определять стабильное нажатие, быстрый легкий удар и взмах поперек датчика. Геометрия датчика и схема управления также дают узлу 10 бесконтактного датчика возможность выявлять направление взмаха, является ли взмах взмахом слева направо, взмахом справа налево, взмахом сверху вниз, взмахом снизу вверх или диагональным взмахом, продолжающимся в направлении между горизонтальной и вертикальной осями. Стабильное нажатие как правило требует, чтобы сигнал, сформированный на обеих, втором и третьем электродах 26A и 26B, был стабильным в течение предопределенного временного диапазона. Быстрый легкий удар как правило требует, чтобы симметричные нарастание и спад сигнала через пиковое значение происходили в пределах короткого временного диапазона. Скользящее движение через датчик или площадку может распознаваться посредством анализа крутизны нарастания или спада сигналов электрода и их относительных временных характеристик.
Если выявлен ввод в действие скользящим движением, как правил происходят следующие этапы. Определяются временные характеристики нарастания и спада обоих сигналов, ассоциативно связанных с вторым и третьим электродами 26A и 26B, также указываемыми ссылкой как Pad1 и Pad2. Также определяются временные характеристики смещения сигналов второго и третьего электродов. Определяется движение слева направо, справа налево или через ни одну из Pad1 и Pad2. Определяется движение от верхнего, второго электрода 26A к нижнему, третьему электроду 26B или от нижнего, третьего электрода 26B к верхнему, второму электроду 26A. Данные комбинируются и обрабатываются для определения общего направления взмаха.
На фиг. 7, сигналы 50A и 50B, сформированные на втором и третьем электродах 26A и 26B, соответственно, в целом проиллюстрированы во время ввода в действие взмахом слева направо. Pad1 указывается ссылкой как сигнал, сформированный вторым электродом 26A относительно первого электрода 28. Pad2 указывается ссылкой как сигнал, сформированный третьим электродом 26B относительно первого электрода 28. Оба сигнала на pad1 и pad2 показаны нарастающими и пересекающими пороговое значение Th в моменты T1a и T2a времени, и нарастающими дальше с первой скоростью до пиковых значений P1 и P2 в моменты T1b и T2b времени, соответственно. Сигналы 50A и 50B на каждом из pad1 и pad2 затем спадают с более низкой, второй скоростью, в целом по линейному закону до порогового значения Th в моменты T1c и T2c времени, соответственно. Временные маски T1a, T1b и T1c являются периодами времени, в которые сигнал на pad1 пересекает пороговое значение Th, тем временем, нарастая, достигает пикового значения и пересекает пороговое значение Th во время убывания в направлении нуля. Временные маски T2a, T2b и T2c являются временными масками для pad2, в которых сигнал пересекает пороговое значение Th во время нарастания, достигает пикового значения, а после этого, пересекает пороговое значение Th, тем временем, убывая в направлении нуля. Когда палец пользователя взаимодействует с электродами на левой стороне переключателя, сигнал нарастает быстрее вследствие более высокой плотности и более близкого разнесения встречно-гребенчатых электродных емкостных пальцеобразных выступов. По мере того, как палец перемещается слева направо и приближается к правой стороне датчика, сигнал убывает вследствие более низкой плотности и большего разнесения между емкостными пальцеобразными выступами электрода, в то время как палец пользователя движется в первом направлении вдоль горизонтальной оси.
Ввод в действие взмахом справа налево проиллюстрирован на фиг. 8, на которой сигналы, ассоциативно связанные с вторым и третьим электродами 26A и 26B относительно первого электрода, пересекают пороговое значение Th, нарастают с первой скоростью до пиковых значений P1 и P2 в моменты T1b и T2b, а затем, спадают с большей, второй скоростью обратно до порогового значения Th в моменты T1c и T2c времени соответственно. В этом примере, нарастание сигнала с первой скоростью является более медленным, чем вторая скорость убывания на правой стороне датчика, вследствие более низкой плотности встречно-гребенчатых электродных емкостных пальцеобразных выступов и большего разнесения емкостных пальцеобразных выступов вдоль горизонтальной оси. Более низкая плотность и большее разнесение между связанными емкостной связью пальцеобразными выступами дают в результате меньшее количество емкостных пальцеобразных выступов, взаимодействующих с пальцем пользователем, что приводит к более слабому сигналу.
Сигналы электродов для ввода в действие скользящим движением сверху вниз проиллюстрированы на фиг. 9 согласно одному из примеров. В этом примере, показан сигнал 50A, ассоциативно связанный с верхним, вторым электродом 26A, нарастающий и пересекающий пороговое значение Th, достигающий пикового значения P1 в момент T1b времени и спадающий обратно до порогового значения Th в момент T1c времени, до какого бы то ни было значимого ввода в действие нижнего, третьего электрода 26B. Нижний, третий электрод 26B формирует задержанный по времени сигнал 50B, который нарастает, пересекает пороговое значение Th, достигает порогового значения P2 в момент T2b времени, а затем, спадает обратно до порогового значения Th в момент T2c времени. Сигнал 50A, ассоциативно связанный со вторым электродом 26A,таким образом, нарастает, достигает пикового значения и спадает раньше, чем нарастает и спадает сигнал 50B, ассоциативно связанный с третьим электродом 26B. Как результат, узел 20 бесконтактного переключателя выявляет ввод в действие верхнего, второго электрода 28A перед выявлением ввода в действие нижнего, третьего электрода 28B во временной последовательности, такой что выявляется ввод в действие скользящим сверху вниз движением. Должно быть принято во внимание, что ввод в действие скользящим снизу вверх движением может выявляться посредством обращения сигналов 50A и 50B, из условия чтобы сигнал 50B так же формировался первым по времени до сигнала 50A.
Узел 20 бесконтактного переключателя дополнительно выполнен с возможностью выявлять ввод в действие диагональным взмахом, такой как ввод в действие сверху слева вправо вниз, как показано на фиг. 10. В этом примере, сигнал 50A, ассоциативно связанный с вторым электродом 26A (pad1), нарастает до порогового значения Th, нарастает дальше с крутой более высокой первой скоростью до максимального значения P1 в момент T1b времени, и медленнее спадает обратно с более низкой, второй скоростью до порогового значения Th в момент T1c времени. Раньше сигнала 50A, падающего ниже порогового значения Th, сигнал 50B, ассоциативно связанный с третьим электродом 26B, нарастает и пересекает пороговое значение Th. Сигнал 50B нарастает дальше до пикового значения P2 в момент T1b времени и медленно спадает с более медленной скоростью обратно до порогового значения Th в момент T2c времени. Узел 20 бесконтактного датчика определяет ввод в действие скользящим сверху слева вправо вниз движением переключателя 22 на основании временных характеристик сигнала 50B, задерживаемого на T12a по сравнению с сигналом 50A, и времени T1ab и T2ab нарастания, являющихся значительно более короткими, чем время T1bc и T2bc спада. Кроме того, должно быть принято во внимание, что ввод в действие скользящим снизу слева вправо вверх движением может выявляться посредством обращения сигналов 50A и 50B во временной последовательности, из условия чтобы сигнал 50B также встречался раньше сигнала 50A. Кроме того, должно быть принято во внимание, что ввод в действие диагональным скользящим сверху справа влево вниз движением может выявляться, и что ввод в действие скользящим снизу справа влево вверх может выявляться посредством обработки скоростей, пиковых значений и временных характеристик сигналов друг относительно друга.
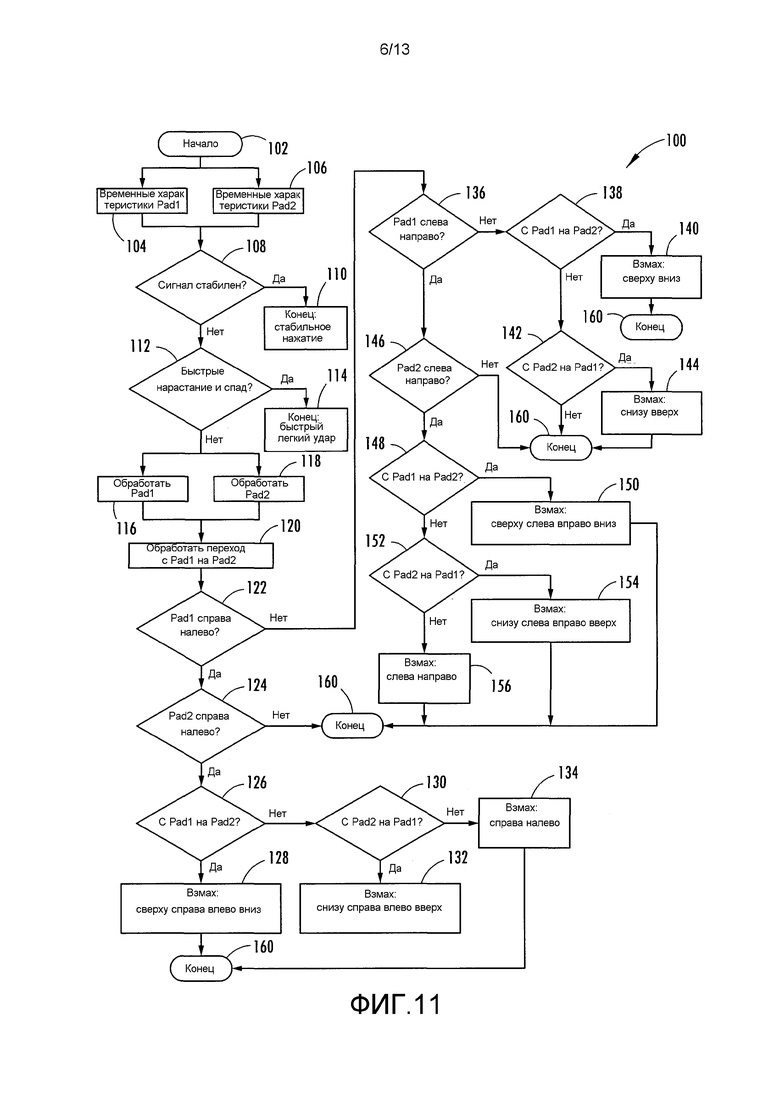
Со ссылкой на фиг. 11, проиллюстрирована процедура 100 для обработки сигналов электрода и определения ввода в действие бесконтактного датчика, показанного на фиг. 6, согласно одному из вариантов осуществления. Процедура 100 может выполняться схемой управления, такой как контроллер 40. Процедура 100 начинается на этапе 102 и переходит к выполнению подпрограмм 104 и 106, чтобы определять сигналы, ассоциативно связанные с каждым из второго и третьего электродов, которые также указываются ссылкой в материалах настоящей заявки соответственно как pad1 и pad2. Подпрограммы 104 и 106 могут выполняться одновременно и могут выполняться повторно.
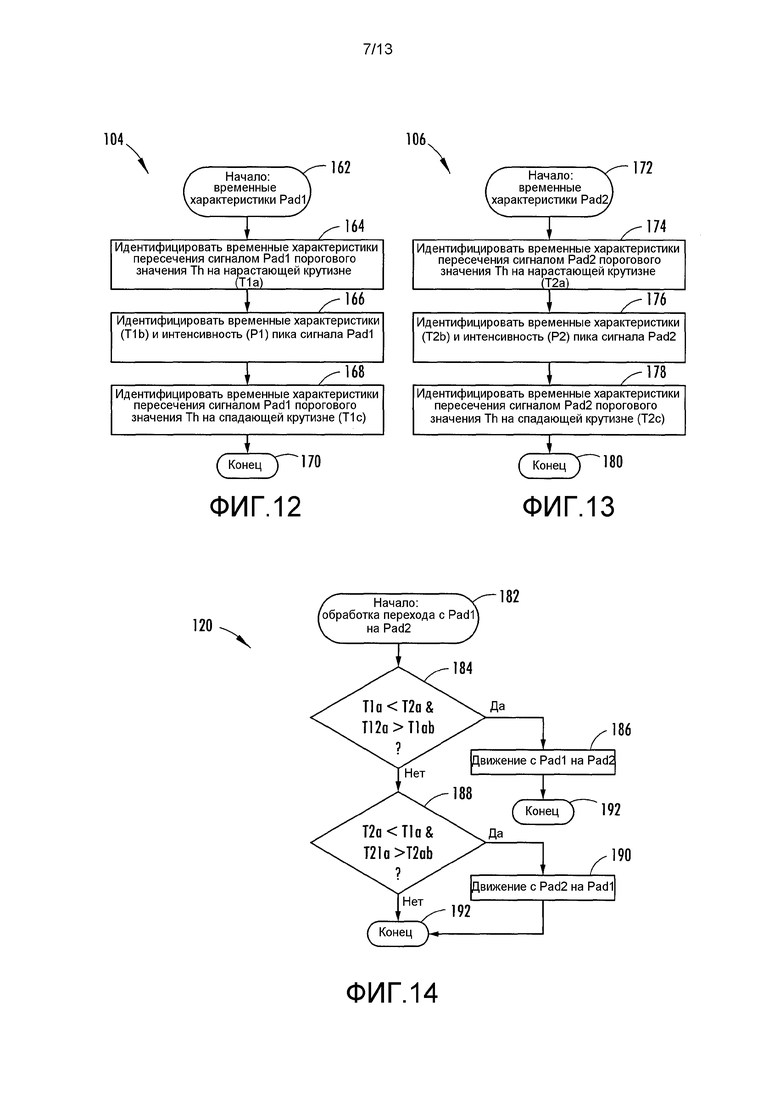
Подпрограмма 104 проиллюстрирована на фиг. 12 начинающейся на этапе 162 и переходящей на этап 164, чтобы идентифицировать временные характеристики сигнала pad1, пересекающего пороговое значение Th на нарастающей крутизне в момент T1a времени. Затем, на этапе 166, подпрограмма 104 идентифицирует временные характеристики в момент T1b времени и интенсивность P1 пикового значения сигнала pad1. Затем, на этапе 168, подпрограмма 104 идентифицирует временные характеристики сигнала pad1, пересекающего пороговое значение Th на спадающей крутизне в момент T1c времени, перед окончанием на этапе 170.
Подпрограмма 106 показана на фиг. 13 начинающейся на этапе 172 и переходящей на этап 174, чтобы идентифицировать временные характеристики сигнала pad2, пересекающего пороговое значение Th на нарастающей крутизне в момент T2a времени. Затем, подпрограмма 106 идентифицирует временные характеристики в момент T2b времени и интенсивность P2 пикового значения сигнала pad2. В заключение, подпрограмма 106 идентифицирует временные характеристики сигнала pad2, пересекающего пороговое значение Th на спадающей крутизне в момент T2c времени, перед окончанием на этапе 180.
Вслед за подпрограммами 104 и 106, процедура переходит на этап 108 принятия решения, чтобы определять, стабилен ли каждый из сигналов на обоих pad1 и pad2, и, если так, определяет таковые вводом в действие стабильным нажатием, а затем, заканчивается на этапе 110. Ввод в действие стабильным нажатием может использоваться для вывода назначенной функции управления. Если сигналы, ассоциативно связанные с pad1 и pad2, не стабильны, процедура 100 переходит на этап 112 принятия решения, чтобы определять, испытывают ли сигналы быстрое нарастание с первой высокой скоростью (дельта счетов/время), вскоре сопровождаемое быстрым спадом с второй высокой скоростью, и, если так, определяет ввод в действие быстрым легким ударом. Ввод в действие быстрым легким ударом может давать в результате выходной сигнал для выполнения назначенной функции управления. Если сигналы не нарастают быстро, а затем, не спадают быстро, процедура 100 переходит в подпрограммы 116 и 118, чтобы обрабатывать сигналы, ассоциативно связанные с каждым из pad1 и pad2.
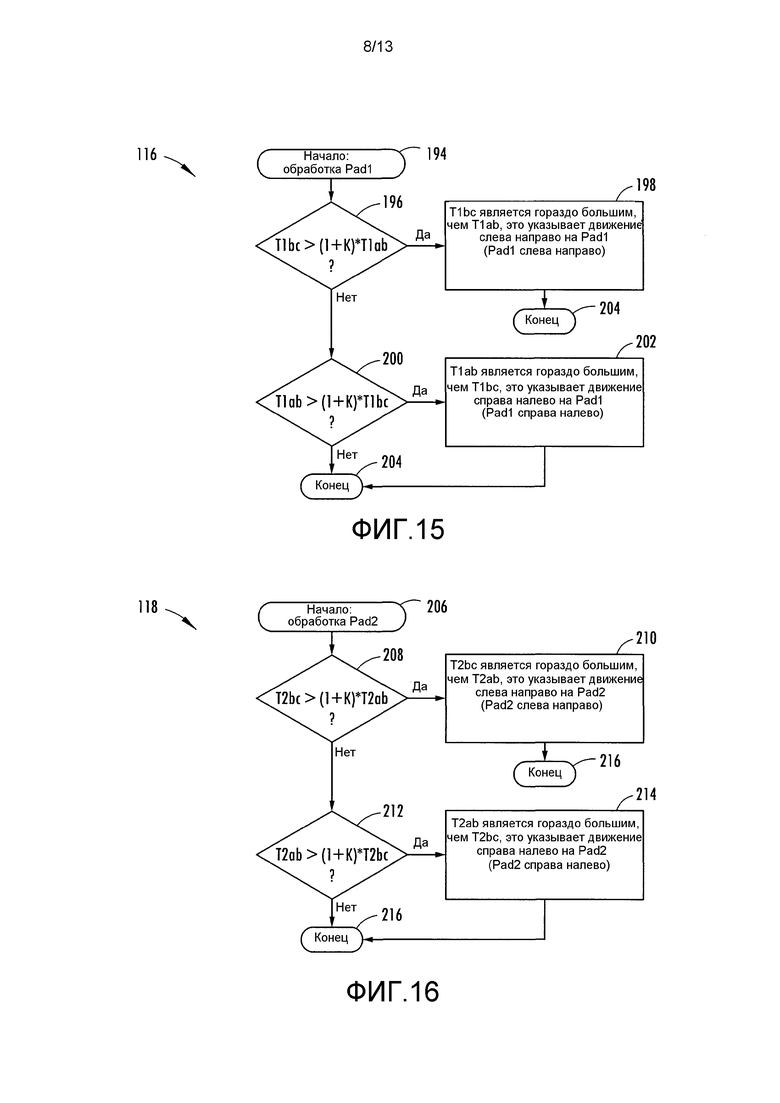
Подпрограмма 116 обработки pad1 проиллюстрирована на фиг. 15 начинающейся на этапе 194 и переходящей на этап 196 принятия решения, чтобы определять, является ли время T1bc большим, чем величина (1 + K)  T2ab, в которой K - постоянная, большая чем ноль. Если да, подпрограмма 116 переходит на этап 198, чтобы определять, что время T2bc является гораздо большим, чем время T2ab, что происходит, когда нарастание сигнала является более быстрым, чем спад сигнала, как видно на фиг. 7, указывающие движение слева направо на pad1, перед окончанием на этапе 204. Если результат этапа 196 принятия решения отрицателен, подпрограмма 116 переходит на этап 200 принятия решения, чтобы определять, является ли время T2ab большим, чем величина (1 + K) T2bc, и, если да, переходит на этап 202, чтобы определять, что время T2ab является гораздо большим, чем время T2bc, что происходит, когда нарастание сигнала является более медленным, чем спад сигнала, как видно на фиг. 8, указывающие движение справа налево на pad1, перед окончанием на этапе 204.
T2ab, в которой K - постоянная, большая чем ноль. Если да, подпрограмма 116 переходит на этап 198, чтобы определять, что время T2bc является гораздо большим, чем время T2ab, что происходит, когда нарастание сигнала является более быстрым, чем спад сигнала, как видно на фиг. 7, указывающие движение слева направо на pad1, перед окончанием на этапе 204. Если результат этапа 196 принятия решения отрицателен, подпрограмма 116 переходит на этап 200 принятия решения, чтобы определять, является ли время T2ab большим, чем величина (1 + K) T2bc, и, если да, переходит на этап 202, чтобы определять, что время T2ab является гораздо большим, чем время T2bc, что происходит, когда нарастание сигнала является более медленным, чем спад сигнала, как видно на фиг. 8, указывающие движение справа налево на pad1, перед окончанием на этапе 204.
Подпрограмма 118 обработки pad2 проиллюстрирована на фиг. 16 начинающейся на этапе 206 и переходящей на этап 208 принятия решения, чтобы определять, является ли время T1bc большим, чем величина (1 + K) T2ab, в которой K - постоянная. Если да, подпрограмма 208 переходит на этап 210, чтобы определять, что время T2bc является гораздо большим, чем время T2ab, что происходит, когда нарастание сигнала является более быстрым, чем спад сигнала, как видно на фиг. 7, указывающие движение слева направо на pad2, перед окончанием на этапе 216. Если результат этапа 208 принятия решения отрицателен, подпрограмма 116 переходит на этап 212 принятия решения, чтобы определять, является ли время T2ab большим, чем величина (1 + K) T2bc, и, если да, переходит на этап 214, чтобы определять, что время T2ab является гораздо большим, чем время T2bc, что происходит, когда нарастание сигнала является более медленным, чем спад сигнала, как видно на фиг. 8, указывающие движение справа налево на pad2, перед окончанием на этапе 216. Вслед за выполнением подпрограмм 116 и 118, процедура 100 переходит на этап 120, чтобы обрабатывать подпрограмму перехода с pad1 на pad2, показанную на фиг. 14, которая определяет, подвергается ли площадка смахиванию совместно, как при горизонтальном взмахе, или одна за другой, как при вертикальном взмахе. Подпрограмма 120 начинается на этапе 182 и переходит к определению, вовлечена ли pad1, перед проверкой, справедливо ли, что T1a < T2a, с pad2, вовлекаемой после того, как достигнут пик на pad1, что определяется, когда T12a  T1ab, и, если так, определяет, что есть движение сверху вниз с pad1 на pad2 на этапе 186, перед окончанием на этапе 192. Если этап 184 принятия решения отрицателен, подпрограмма 120 переходит на этап 188 принятия решения, чтобы определять, вовлекается ли pad2 раньше pad1, посредством проверки, справедливо ли, что T2a < T1a, с pad1 вовлекаемой после того, как достигнут пик на pad2, что определяется, когда T21a > T2ab, и, если так, определяет, есть ли движение снизу вверх с pad2 на pad1 на этапе 190, перед окончанием на этапе 192.
T1ab, и, если так, определяет, что есть движение сверху вниз с pad1 на pad2 на этапе 186, перед окончанием на этапе 192. Если этап 184 принятия решения отрицателен, подпрограмма 120 переходит на этап 188 принятия решения, чтобы определять, вовлекается ли pad2 раньше pad1, посредством проверки, справедливо ли, что T2a < T1a, с pad1 вовлекаемой после того, как достигнут пик на pad2, что определяется, когда T21a > T2ab, и, если так, определяет, есть ли движение снизу вверх с pad2 на pad1 на этапе 190, перед окончанием на этапе 192.
Вслед за выполнением подпрограммы 120, процедура 100 переходит на этап 122 принятия решения, чтобы определять, выявлен ли взмах справа налево на pad1, и, если так, переходит на этап 124 принятия решения, чтобы определять, выявлен ли взмах справа налево на pad2. Если взмах справа налево выявлен на обеих, pad1 и pad2, процедура 100 переходит на этап 126 принятия решения, чтобы определять, выявлена ли составляющая вертикального взмаха сверху вниз с pad1 на pad2, и, если так, определяет, что ввод в действие взмахом является вводом в действие по диагонали сверху справа влево вниз на этапе 120, перед окончанием на этапе 160. Если этап 126 принятия решения определяет, что ввод в действие не является движением сверху вниз с pad1 на pad2, процедура 100 переходит на этап 130 принятия решения, чтобы определять, является ли движение движением снизу вверх с pad2 на pad1, и, если так, определяет, что ввод в действие взмахом является вводом в действие по диагонали снизу справа влево вверх на этапе 132, перед окончанием на этапе 160. Если этап 130 принятия решения определяет, что ввод в действие не является движением снизу вверх с pad2 на pad1, процедура 100 переходит на этап 134, чтобы определять, что ввод в действие взмахом является вводом в действие взмахом справа налево, перед окончанием на этапе 160.
Возвращаясь на этап 122 принятия решения, если движение справа налево на pad1 не выявлено, процедура 100 переходит на этап 136 принятия решения, чтобы определять, является ли движение на pad1 движением слева направо, и, если так, переходит на этап 146 принятия решения, чтобы определять, является ли движение на pad2 движением слева направо, и, если нет, заканчивается на этапе 160. Если взмах на pad2 является движением справа налево, процедура 100 переходит на этап 148 принятия решения, чтобы определять, есть ли составляющая движения сверху вниз с pad1 на pad2, и, если так, определяет ввод в действие взмахом сверху слева вправо вниз на этапе 150 перед окончанием на этапе 160. Если движения с pad1 на pad2 нет на этапе 148, процедура 100 переходит на этап 152 принятия решения, чтобы определять, есть ли составляющая движения снизу вверх с pad2 на pad1, и, если так, определяет ввод в действие взмахом в качестве взмаха снизу слева вправо вверх на этапе 154 перед окончанием на этапе 160. Если нет ни движения с pad1 на pad2 ни с pad2 на pad1, как определено посредством этапов 148 и 152 принятия решения, процедура 100 переходит к определению, что есть ввод в действие взмахом движения слева направо на этапе 156, перед окончанием на этапе 160.
Если этап 136 принятия решения определяет, что pad1 не испытывает движение справа налево, процедура 100 переходит к принятию решения 138, чтобы определять, есть ли движение сверху вниз с pad1 на pad2, и, если так, определяет ввод в действие взмахом сверху вниз на этапе 140 перед окончанием на этапе 160. Если этап 138 принятия решения определяет, что нет движения сверху вниз с pad1 на pad2, процедура 100 переходит на этап 142 принятия решения, чтобы определять, есть ли движение снизу вверх с pad2 на pad1, и, если так, определяет ввод в действие взмахом снизу вверх на этапе 144 перед окончанием на этапе 160.
Соответственно, процедура 100 управления преимущественно определяет нажатие легким ударом или стабильным нажатием переключателя 22 в качестве одного или двух выходных сигналов управления. Дополнительно, процедура 100 управления может определять направленный левый или правый взмах и выдавать выходные сигналы управления вследствие этого. Кроме того, процедура 100 управления может определять взмахи вверх или вниз сверху вниз или снизу вверх для дополнительных выходных сигналов управления. В заключение, процедура 100 управления может определять диагональные взмахи, такие как сверху справа влево вниз или снизу справа влево вверх и другие диагональные движения в направлении вдоль оси между горизонтальной и вертикальной осями, в качестве дополнительных выходных сигналов управления.
Со ссылкой на фиг. 17, проиллюстрирован бесконтактный датчик 24 для использования в узле 20 бесконтактного переключателя согласно второму варианту осуществления. В этом варианте осуществления, первый приемный электрод 28 применяется с вторым задающим электродом 26, в силу чего, задающий электрод 28 вырабатывает сигнал VI напряжения, а приемный электрод 28 вырабатывает выходной сигнал VO напряжения. Первый электрод 28 включает в себя множество первых емкостных пальцеобразных выступов 29A-29C. Второй электрод 26 включает в себя множество вторых емкостных пальцеобразных выступов 27A-27E. Первые и вторые емкостные пальцеобразные выступы как правило противоположны друг другу, и многие из первых и вторых емкостных пальцеобразных выступов являются встречно-гребенчатыми, чтобы создавать емкостное поле друг относительно друга. Второй электрод 26 дополнительно включает в себя первое вертикальное расширение 31A, которое частично окружает первый электрод, и второе вертикальное расширение 31B, которое подобным образом частично окружает первый электрод 28. Каждый из емкостных пальцеобразных выступов первого и второго электродов продолжается наружу под углом относительно горизонтальной оси и является встречно-гребенчатым, из условия чтобы обеспечивать меняющуюся плотность вдоль горизонтальной оси и давать переменное разнесение между связанными емкостной связью пальцеобразными выступами вдоль горизонтальной оси. В этом варианте осуществления, всего лишь один задающий электрод 26 применяется в противоположность двум задающим электродам, как показано и описано в связи с первым вариантом осуществления. В дополнение, первый электрод 28 не включает в себя емкостной пальцеобразный выступ, с тем чтобы создавать разные разнесение и плотность среди связанных емкостной связью пальцеобразных выступов. Бесконтактный датчик 24 преимущественно предоставляет возможность, чтобы ввод в действие быстрым легким ударом или стабильным нажатием выявлялось в дополнение к вводу в действие горизонтальным движением слева направо или справа налево и вводу в действие вертикальным движением сверху вниз или снизу вверх, как описано в материалах настоящей заявки.
На фиг. 18-21, проиллюстрировано изменение счетов импульса заряда датчика, показанное в качестве  счета датчика для канала прохождения сигнала, ассоциативно связанного с бесконтактным датчиком 22, применяющим бесконтактный датчик 24, показанный на фиг. 14, согласно различным примерам. На фиг. 18, сигнал 50, сформированный вторым электродом 26 относительно первого электрода 28, в целом проиллюстрирован во время ввода в действие взмахом слева направо. Сигнал 50 показан нарастающим и пересекающим пороговое значение Th в момент Ta времени и нарастающим дальше с первой скоростью до пикового значения Pb на момент Tb времени перед более постепенным спадом обратно с меньшей, второй скоростью до порогового значения Th в момент Td времени. Временная маска Tab представляет собой промежуток времени, чтобы сигнал 50 нарастал от момента Ta времени до Tb, тогда как промежуток Tbd времени представляет собой промежуток времени, чтобы сигнал 50 спадал от момента Tb времени до момента Td времени. Когда палец пользователя взаимодействует с левой стороной датчика 24, присутствуют более высокая плотность емкостных пальцеобразных выступов и более близкое разнесение между связанными емкостной связью пальцеобразными выступами электрода, которые дают в результате более высокий сигнал, тогда как палец пользователя перемещается слева направо, правая сторона имеет более низкую плотность емкостных пальцеобразных выступов и большее разнесение между связанными емкостной связью пальцеобразными выступами, тем самым, давая в результате более низкий сигнал. По существу, схема управления может определять, что было введено в действие движение взмаха слева направо.
счета датчика для канала прохождения сигнала, ассоциативно связанного с бесконтактным датчиком 22, применяющим бесконтактный датчик 24, показанный на фиг. 14, согласно различным примерам. На фиг. 18, сигнал 50, сформированный вторым электродом 26 относительно первого электрода 28, в целом проиллюстрирован во время ввода в действие взмахом слева направо. Сигнал 50 показан нарастающим и пересекающим пороговое значение Th в момент Ta времени и нарастающим дальше с первой скоростью до пикового значения Pb на момент Tb времени перед более постепенным спадом обратно с меньшей, второй скоростью до порогового значения Th в момент Td времени. Временная маска Tab представляет собой промежуток времени, чтобы сигнал 50 нарастал от момента Ta времени до Tb, тогда как промежуток Tbd времени представляет собой промежуток времени, чтобы сигнал 50 спадал от момента Tb времени до момента Td времени. Когда палец пользователя взаимодействует с левой стороной датчика 24, присутствуют более высокая плотность емкостных пальцеобразных выступов и более близкое разнесение между связанными емкостной связью пальцеобразными выступами электрода, которые дают в результате более высокий сигнал, тогда как палец пользователя перемещается слева направо, правая сторона имеет более низкую плотность емкостных пальцеобразных выступов и большее разнесение между связанными емкостной связью пальцеобразными выступами, тем самым, давая в результате более низкий сигнал. По существу, схема управления может определять, что было введено в действие движение взмаха слева направо.
Ввод в действие взмаха с правой стороны к левой стороне датчика 24 проиллюстрирован на фиг. 19, на которой сигнал, ассоциативно связанный с вторым электродом 26 относительно первого электрода 28, нарастает и достигает порогового значения Th в момент Ta времени, а затем, дополнительно нарастает на первой, более медленной скорости до пикового значения Pb в момент Tb времени перед резким спадом на более высокой, второй скорости обратно до порогового значения Th в момент Td времени. В этом примере, нарастание сигнала является более медленным на левой стороне датчика по сравнению с правой стороной вследствие более низкой плотности встречно-гребенчатых пальцеобразных выступов электродов и большего разнесения связанных емкостной связью пальцеобразных выступов на правой стороне по горизонтальной оси.
Ввод в действие сверху вниз датчика 24 проиллюстрирован на фиг. 20 согласно одному из примеров. Сигнал 50 нарастает, чтобы пересекать пороговое значение Th в момент Ta времени, а затем, продолжает нарастать до первого пикового значения Pb в момент Tb времени, и затем, спадает до более низкого значения перед нарастанием обратно вплоть до второго пикового значения Pc в момент Tc времени. Второе пиковое значение Pc является меньшим, чем первое пиковое значение Pb. Сигнал 50, после этого, спадает до нуля. Схема управления определяет, что сигнал 50 является указывающим взмах сверху вниз, так как первое пиковое значение Pb является большим, чем второе пиковое значение Pc, а большее значение происходит в результате вследствие более высокой плотности емкостных пальцеобразных выступов и более близкого разнесения между связанными емкостной связью пальцеобразными выступами 24, ассоциативно связанными с верхней частью емкостного датчика 24 по сравнению с нижней частью датчика 24.
Ввод в действие снизу вверх датчика 24 проиллюстрирован на фиг. 21 согласно одному из примеров. Сигнал 50 нарастает, чтобы пересекать пороговое значение Th в момент Ta времени, а затем, продолжает нарастать до первого пикового значения Pb в момент Tb времени, и затем, спадает до более низкого значения перед нарастанием обратно вплоть до второго пикового значения Pc в момент Tc времени. Второе пиковое значение Pc является большим, чем первое пиковое значение Pb. Сигнал 50, после этого, спадает до нуля. Схема управления определяет, что сигнал 50 является указывающим взмах снизу вверх, так как первое пиковое значение Pb является меньшим, чем второе пиковое значение Pc, а меньшее значение происходит в результате вследствие меньшей плотности емкостных пальцеобразных выступов и более близкого разнесения между связанными емкостной связью пальцеобразными выступами 24, ассоциативно связанными с нижней частью емкостного датчика 24 по сравнению с верхней частью датчика 24.
Процедура 300 для определения ввода в действие бесконтактного переключателя 22, применяющего емкостной датчик 24 по фиг. 17, проиллюстрирована на фиг. 22 согласно одному из вариантов осуществления. Процедура 300 начинается на этапе 302 и переходит на этап 304, чтобы выполнять подпрограмму 304 сбора временных характеристик. Подпрограмма 304 сбора временных характеристик показана на фиг. 23. Подпрограмма 304 начинается на этапе 350 и переходит на этап 352, чтобы идентифицировать временные характеристики сигнала, пересекающего пороговое значение Th на нарастающей крутизне, которая основана на моменте Ta времени. Затем, подпрограмма 304 идентифицирует временные характеристики Tb и интенсивность Pb первого пикового значения сигнала на этапе 354. На этапе 356, подпрограмма 304 идентифицирует временные характеристики Tc и интенсивность Pc второго пикового значения сигнала, если присутствует. В заключение, подпрограмма 304 идентифицирует временные характеристики сигнала Pad1, пересекающего пороговое значение Th на спадающей крутизне, которая основана на моменте Td времени, перед окончанием на этапе 360.
Вслед за выполнением подпрограммы 304, процедура 300 определяет, стабилен ли сигнал на этапе 306 принятия решения, и, если так, заканчивается выбором стабильного нажатия на этапе 308. Если сигнал не стабилен, процедура 300 переходит на этап 310 принятия решения, чтобы определять, есть ли быстрые нарастание и спад, и, если так, заканчивается выбором быстрого легкого удара на этапе 312. Если нет быстрого нарастания и спада, процедура 300 определяет, на этапе 314 принятия решения, есть ли только одно пиковое значение. Если есть только одно пиковое значение, процедура 300 переходит на этап 324 принятия решения, чтобы определять, является ли промежуток Tbd времени большим, чем (1+K) x Tab, и, если так, определяет, что есть взмах слева направо на этапе 326 перед окончанием на этапе 332. Если этап 324 принятия решения имеет отрицательный выходной сигнал, процедура 300 переходит на этап 328 принятия решения, чтобы определять, является ли промежуток Tbd времени большим, чем (1+K) x Tab, и, если так, определяет, что промежуток Tab времени является гораздо большим, чем промежуток Tbd времени, что указывает движение справа налево по площадке, а затем, заканчивается на этапе 332.
Если этап 314 принятия решения определяет, что есть больше, чем один пик, процедура 300 переходит на этап 316 принятия решения, чтобы определять, является ли первое пиковое значение Pb сигнала большим, чем (1+K) x Pc, и, если так, определяет на этапе 318, что первый пик Pb является большим, чем второй пик Pc, что является указывающим взмах сверху вниз, а затем, заканчивается на этапе 332. Иначе, этап 320 принятия решения определяет, является ли второй пик Pc большим, чем (1+K) x Pb, и, если так, определяет на этапе 322, что второй пик Pc является большим, чем второй пик Pb, что указывает взмах снизу вверх, а затем, заканчивается на этапе 332.
Должно быть понятно, что изменения и модификации могут быть произведены над вышеупомянутой конструкцией, не выходя из концепций настоящего изобретения, а кроме того, должно быть понятно, что такие концепции подразумеваются покрытыми следующей формулой изобретения, если эта формула изобретения явным образом не излагает иное своим языком.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ БЕСКОНТАКТНЫХ ДАТЧИКОВ И УЗЕЛ БЕСКОНТАКТНЫХ ПЕРЕКЛЮЧАТЕЛЕЙ | 2016 |
|
RU2711607C2 |
| БЕСКОНТАКТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ И СПОСОБ ЕГО АКТИВАЦИИ | 2015 |
|
RU2676921C2 |
| УЗЕЛ БЕСКОНТАКТНЫХ ПЕРЕКЛЮЧАТЕЛЕЙ, ИМЕЮЩИЙ ТАКТИЛЬНУЮ ОБРАТНУЮ СВЯЗЬ, И СПОСОБ | 2016 |
|
RU2693574C2 |
| СПОСОБ АКТИВАЦИИ БЕСКОНТАКТНОГО ПЕРЕКЛЮЧАТЕЛЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2669655C2 |
| БЕСКОНТАКТНЫЙ ПЕРЕКЛЮЧАЮЩИЙ УЗЕЛ (ВАРИАНТЫ) | 2015 |
|
RU2678775C2 |
| УЗЕЛ БЕСКОНТАКТНОГО ПЕРЕКЛЮЧАТЕЛЯ И УЗЕЛ БЕСКОНТАКТНОГО ПЕРЕКЛЮЧАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2676913C2 |
| ИНТЕРФЕЙС ПЕРЕКЛЮЧАТЕЛЯ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА, ИСПОЛЬЗУЮЩИЙ БЕСКОНТАКТНОЕ СЧИТЫВАНИЕ | 2017 |
|
RU2729127C2 |
| ОСНОВАННАЯ НА ДВИЖЕНИИ ЕМКОСТНАЯ СЕНСОРНАЯ СИСТЕМА | 2016 |
|
RU2707492C2 |
| КНОПОЧНЫЙ ИНТЕРФЕЙС ПЕРЕКЛЮЧАТЕЛЯ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА, ИСПОЛЬЗУЮЩИЙ РАСПОЗНАВАНИЕ ПРИБЛИЖЕНИЯ | 2017 |
|
RU2730816C2 |
| БЕСКОНТАКТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ С ЗАПОМИНАНИЕМ ЧУВСТВИТЕЛЬНОСТИ И СПОСОБ ЗАПОМИНАНИЯ ЧУВСТВИТЕЛЬНОСТИ | 2012 |
|
RU2605916C2 |
Группа изобретений относится к бесконтактным переключателям, имеющим улучшенную активацию переключателя. Узел бесконтактного переключателя содержит бесконтактный датчик и схему управления. Бесконтактный датчик содержит первый и второй электроды. Первый электрод содержит первые пальцеобразные выступы, продолжающиеся наружу под отличающимися острыми углами относительно друг друга. Второй электрод содержит вторые пальцеобразные выступы, встречно-гребенчатые с первыми пальцеобразными выступами с переменным разнесением между ними вдоль первого направления. Схема управления обрабатывает сигнал в ответ на ввод в действие пользователем бесконтактного датчика и определяет ввод в действие скользящим движением датчика в первом направлении и втором направлении. Достигается возможность определения активации бесконтактного переключателя на основании нарастания и спада сигнала относительно пикового значения. 3 н. и 13 з.п. ф-лы, 23 ил.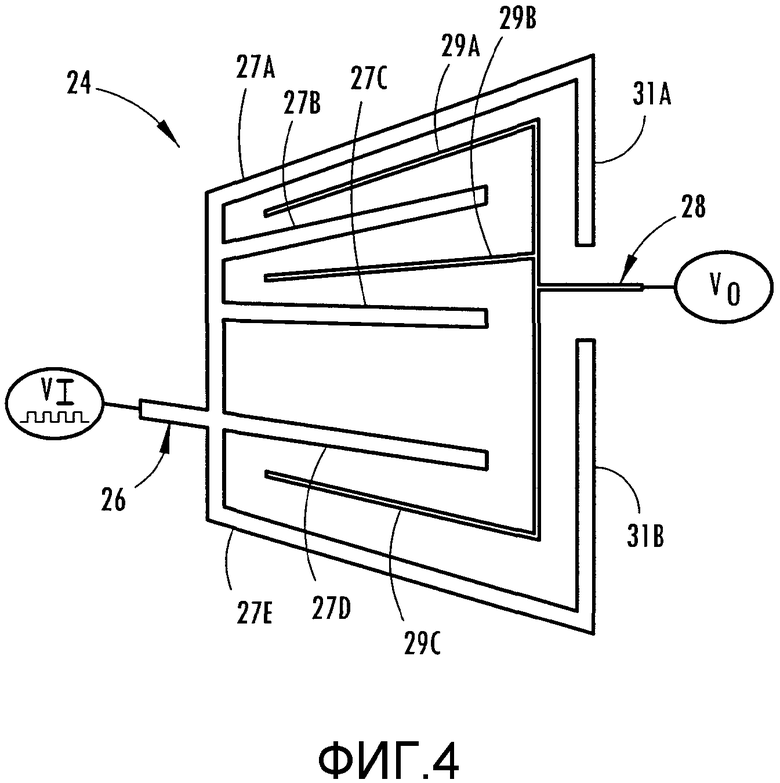
1. Узел бесконтактного переключателя, содержащий:
бесконтактный датчик, содержащий первый электрод, содержащий первые пальцеобразные выступы, продолжающиеся наружу под отличающимися острыми углами относительно друг друга, и второй электрод, содержащий вторые пальцеобразные выступы, встречно-гребенчатые с первыми пальцеобразными выступами с переменным разнесением между ними вдоль первого направления; и
схему управления, обрабатывающую сигнал в ответ на ввод в действие пользователем бесконтактного датчика и определяющую ввод в действие скользящим движением датчика в первом направлении и втором направлении.
2. Узел бесконтактного переключателя по п. 1, в котором первое и второе множество пальцеобразных выступов являются встречно-гребенчатыми с переменной плотностью вдоль первого направления.
3. Узел бесконтактного переключателя по п. 1, в котором второе направление перпендикулярно первому направлению.
4. Узел бесконтактного переключателя по п. 3, дополнительно содержащий третий электрод, содержащий третье множество пальцеобразных выступов, встречно-гребенчатых с некоторыми из первого множества пальцеобразных выступов первого электрода, причем второй электрод и третий электрод обрабатываются для определения скользящего движения во втором направлении.
5. Узел бесконтактного переключателя по п. 4, в котором схема управления дополнительно определяет ввод в действие скользящим движением вдоль третьего направления между первым и вторым направлениями.
6. Узел бесконтактного переключателя по п. 1, в котором схема управления дополнительно определяет ввод в действие легким ударом на основании обработанного сигнала.
7. Узел бесконтактного переключателя по п. 1, дополнительно содержащий схему управления, контролирующую поле возбуждения, ассоциативно связанное с бесконтактным датчиком, и определяющую активацию бесконтактного переключателя на основании нарастания и спада сигнала относительно пикового значения.
8. Узел бесконтактного переключателя по п. 1, при этом узел бесконтактного переключателя содержит емкостный переключатель, содержащий один или более емкостных датчиков.
9. Узел бесконтактного переключателя по п. 1, при этом узел установлен в транспортном средстве.
10. Узел бесконтактного переключателя, содержащий:
бесконтактный датчик, содержащий первый электрод, содержащий первые пальцеобразные выступы, продолжающиеся наружу под отличающимися острыми углами относительно друг друга, и второй электрод, содержащий вторые пальцеобразные выступы, встречно-гребенчатые с первыми пальцеобразными выступами с переменной плотностью вдоль первого направления; и
схему управления, обрабатывающую сигнал в ответ на ввод в действие пользователем бесконтактного датчика и определяющую ввод в действие скользящим движением датчика в первом направлении и втором направлении.
11. Узел бесконтактного переключателя по п. 10, в котором первые и вторые пальцеобразные выступы являются встречно-гребенчатыми с переменным разнесением между ними вдоль первого направления.
12. Узел бесконтактного переключателя по п. 10, в котором второе направление перпендикулярно первому направлению.
13. Узел бесконтактного переключателя по п. 12, дополнительно содержащий третий электрод, содержащий третье множество пальцеобразных выступов, встречно-гребенчатых с некоторыми из первого множества пальцеобразных выступов первого электрода, при этом второй электрод и третий электрод обрабатываются для определения скользящего движения во втором направлении.
14. Узел бесконтактного переключателя по п. 13, в котором схема управления дополнительно определяет ввод в действие скользящим движением вдоль третьего направления между первым и вторым направлениями.
15. Узел бесконтактного переключателя по п. 10, дополнительно содержащий схему управления, контролирующую поле возбуждения, ассоциативно связанное с бесконтактным датчиком, и определяющую активацию бесконтактного переключателя на основании нарастания и спада сигнала относительно пикового значения.
16. Способ ввода в действие узла бесконтактного переключателя, состоящий в том, что:
предоставляют бесконтактный датчик, содержащий первый электрод, содержащий первые пальцеобразные выступы, продолжающиеся наружу под отличающимися острыми углами относительно друг друга, и второй электрод, содержащий вторые пальцеобразные выступы, причем первые и вторые пальцеобразные выступы являются встречно-гребенчатыми с меняющейся плотностью вдоль первого направления;
обрабатывают сигнал в ответ на ввод в действие пользователем бесконтактного датчика; и
определяют ввод в действие скользящим движением бесконтактного датчика в первом направлении и втором направлении на основании обработанного сигнала.
| US 2014002405 A1, 02.01.2014 | |||
| US 6189381 B1, 20.02.2001 | |||
| US 2014076063 A1, 20.03.2014 | |||
| DE 4024052 A1, 30.01.1992. |

