ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Эта заявка относится в общем к емкостным сенсорным системам, используемым в системах доступа к транспортным средствам.
УРОВЕНЬ ТЕХНИКИ
Емкостные сенсорные площадки, также называемые емкостными сенсорными панелями, обнаруживают проводящий объект или объект с диэлектрическими свойствами, отличными от воздуха рядом с панелью. Использование емкостных сенсорных панелей было принято во многих электрических системах, в том числе в системах бесключевого доступа. Системы бесключевого доступа могут обеспечивать удобный способ доступа людей в закрытую зону, в том числе здание, дом и транспортное средство, без ключа, брелока или другого устройства аутентификации. Системы бесключевого доступа часто используются людьми, которые выходят на пробежку, тренировку или прогулку и предпочитают не носить ключ или оставлять ключи внутри запертой зоны. Системы бесключевого доступа также могут использоваться для обеспечения возможности доступа во внутреннюю область запертого транспортного средства другу или ребенку, не наделяя их способностью запускать транспортное средство. Типичный брелок имеет цифровую кнопочную панель и реализован с использованием механических или емкостных кнопок. Емкостная технология может обеспечивать преимущество лучшего уплотнения и улучшенной герметизации по сравнению с механическими кнопками. Несмотря на то, что интуитивно понятна и быстра для использования, традиционная цифровая кнопочная панель имеет два недостатка. Во-первых, традиционные цифровые кнопочные панели имеют жесткие ограничения по внешнему оформлению, требуя, чтобы специальный цифровой графический интерфейс был представлен пользователю. Во-вторых, традиционные цифровые кнопочные панели могут иметь некоторые проблемы безопасности, среди которых было известно, что похитители будут использовать технологию создания тепловых изображений для реконструкции последовательности активации.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Бесконтактная сенсорная система включает в себя проводящий первый печатный проводник и проводящий второй печатный проводник. Проводящий второй проводник является смежным с первым печатным проводником, перемежающимся с ним и электрически изолированным от него. К тому же, плотность печатных проводников изменяется вдоль первой оси таким образом, чтобы скорости изменения емкости между печатными проводниками, связанные с перемещением объекта через электрическое поле в направлении первой оси на постоянной скорости, указывали на направление.
Реализуемый контроллером способ включает в себя вывод контроллером первого сигнала на основании скоростей изменения емкости между первым и вторым печатным проводником емкостной сенсорной панели. Первый и второй печатные проводники емкостной сенсорной панели имеют первый градиент плотности печатных проводников по первой оси в пределах первой зоны, таким образом, чтобы первый сигнал указывал на направление перемещения объекта через электрическое поле, связанное с емкостной сенсорной панелью, с постоянной скоростью вдоль первой оси.
Бесконтактная сенсорная система включает в себя первый и второй печатные проводники. Первый и второй печатные проводники электрически изолированы друг от друга. Первый и второй печатные проводники определяют структуру, имеющую плотность печатных проводников, которая меняется вдоль оси, перпендикулярной оси асимметрии структуры. К тому же, скорости изменения емкости между первым и вторым печатными проводниками, связанные с перемещением объекта через электрическое поле на постоянной скорости в направлении, перпендикулярном оси, указывали на направление.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
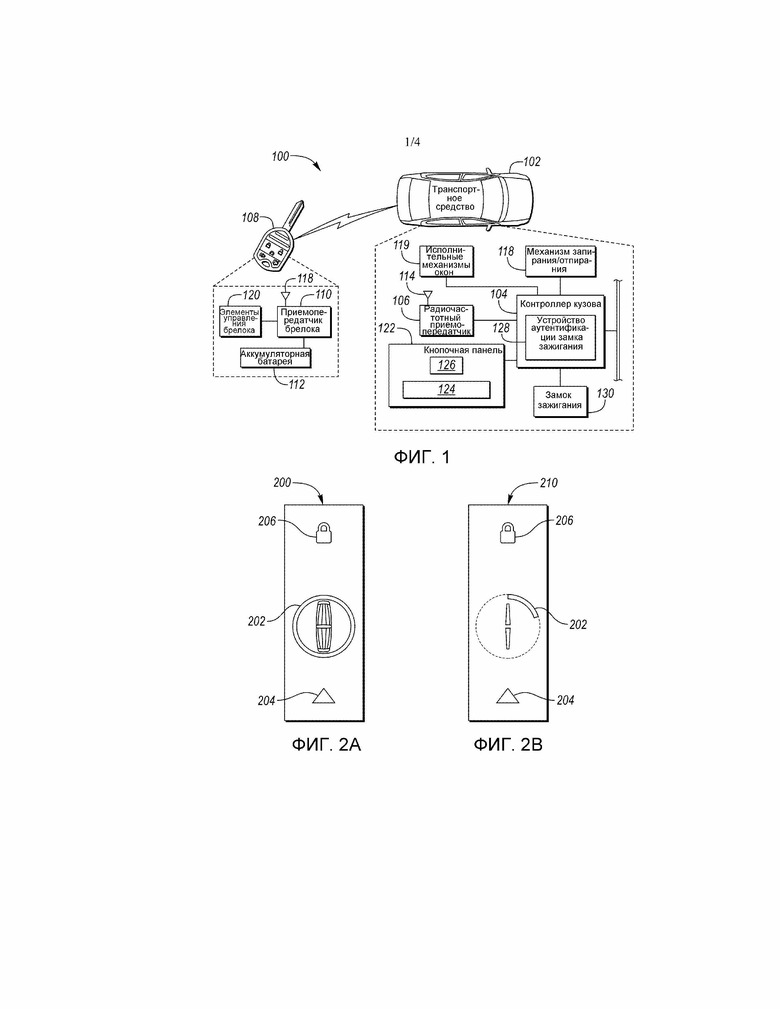
Фиг. 1 иллюстрирует примерную систему бесключевого доступа к транспортному средству, включающую в себя основанную на чувствительных элементах кнопочную панель.
Фиг. 2A - примерная иллюстрация сенсорной панели транспортного средства.
Фиг. 2B - примерная иллюстрация сенсорной панели транспортного средства, отображающая данные после приема пользовательского ввода.
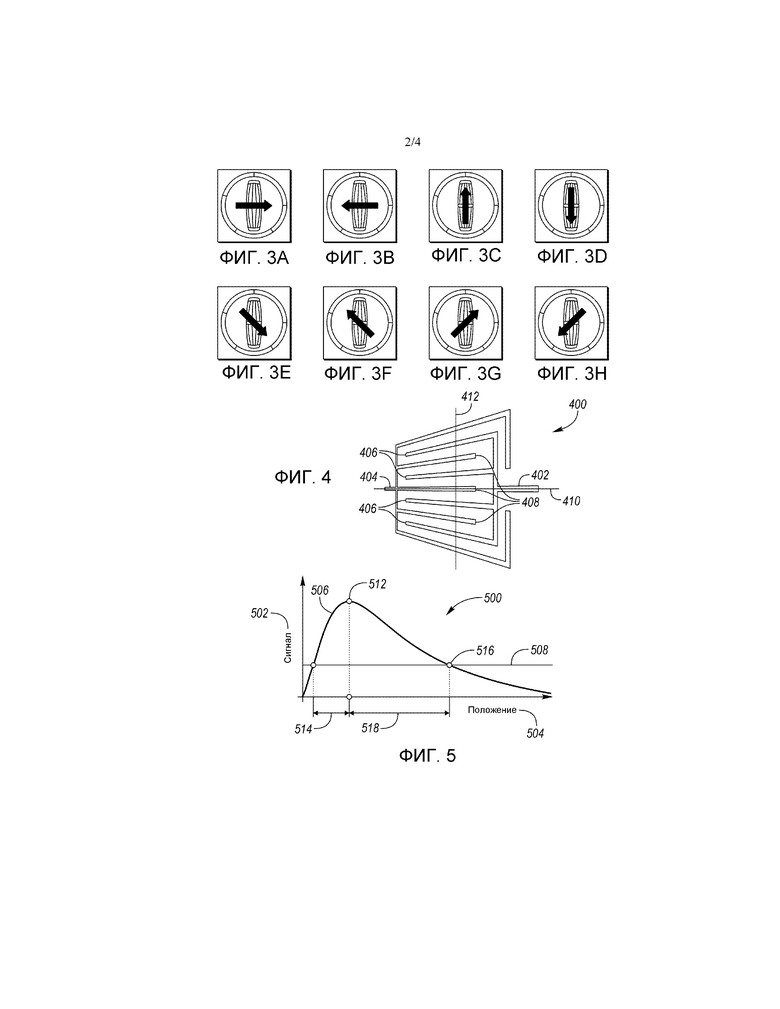
Фиг. 3A-3H - примерные иллюстрации скользящих движений пользователя, которые может обнаруживать сенсорная система транспортного средства.
Фиг. 4 - примерная иллюстрация бесконтактной сенсорной панели, имеющей градиент плотности печатных проводников.
Фиг. 5 - примерное графическое изображение сигнала из бесконтактной сенсорной панели по фиг. 4, основанного на скользящем движении.
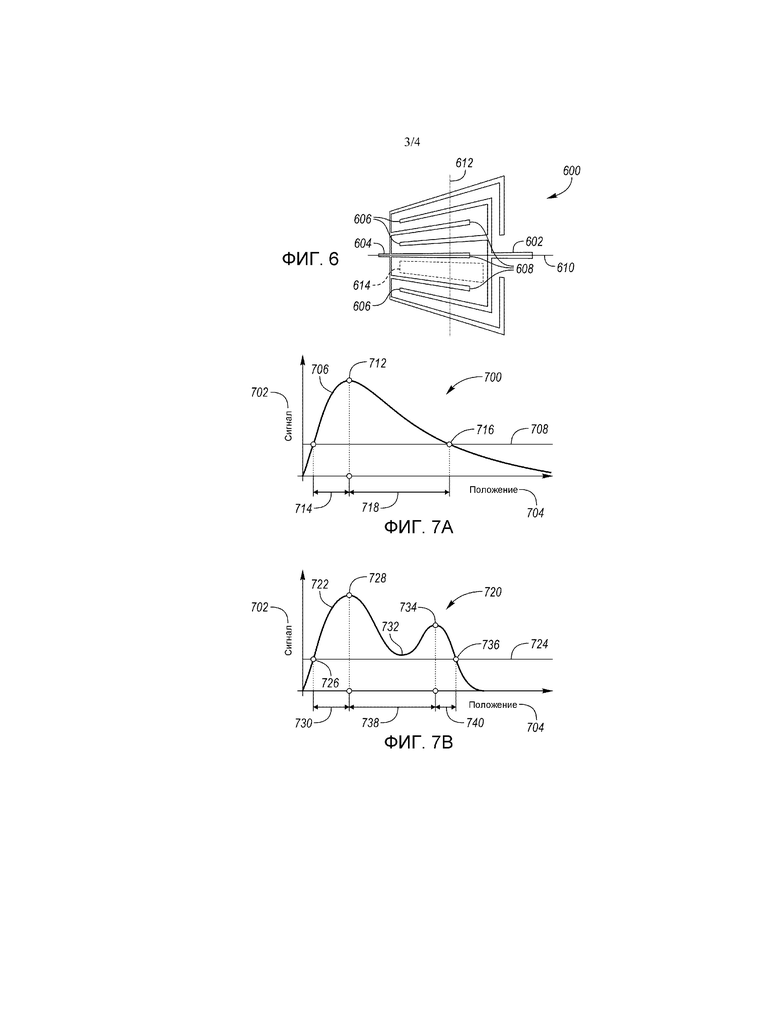
Фиг. 6 - примерная иллюстрация бесконтактной сенсорной панели, имеющей градиент плотности печатных проводников и область пониженной плотности печатных проводников.
Фиг. 7A-7B - примерные графические изображения сигнала из бесконтактной сенсорной панели по фиг. 6, основанного на скользящих движениях.
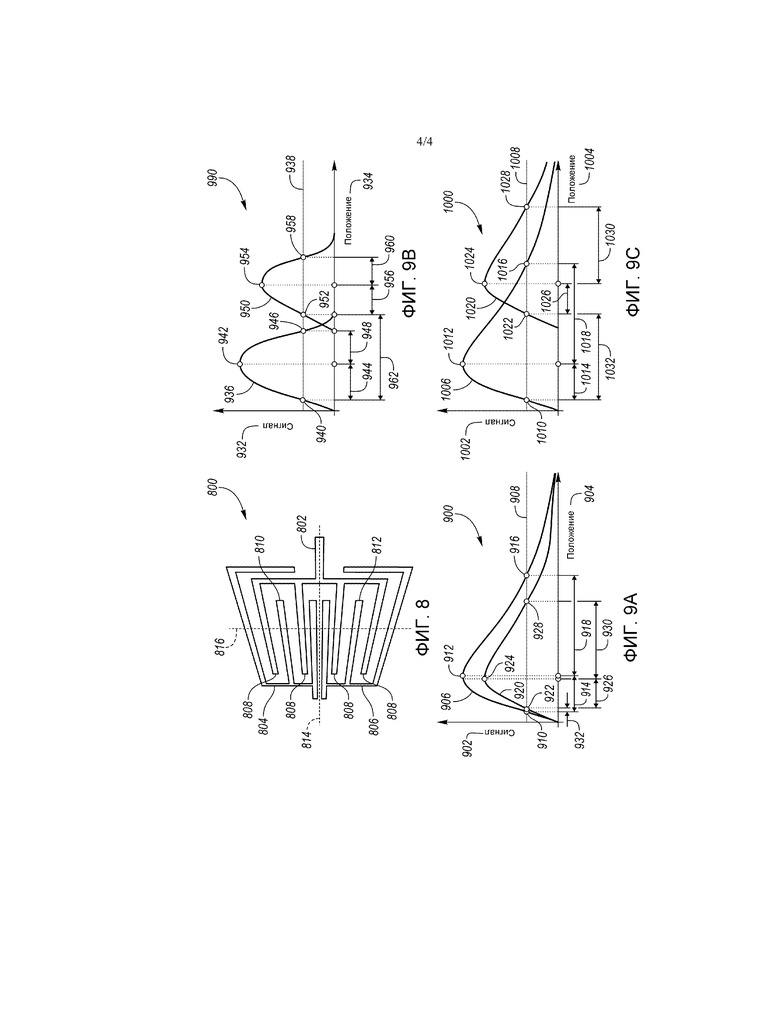
Фиг. 8 - примерная иллюстрация многозоновой бесконтактной сенсорной панели, имеющей градиент плотности печатных проводников.
Фиг. 9A-9C - примерные графические изображения сигналов из многозоновой бесконтактной сенсорной панели по фиг. 8.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения описаны в материалах настоящей заявки. Однако следует понимать, что раскрытые варианты осуществления являются лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Чертежи не обязательно выполнены в масштабе; некоторые признаки могут быть преувеличены или преуменьшены, чтобы показать подробности определенных компонентов. Поэтому конкретные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, должны интерпретироваться не как ограничивающие, а лишь как формирующие основу для информирования специалиста в данной области техники о различных применениях вариантов осуществления. Как будет понятно специалистам в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любой из чертежей, могут комбинироваться с признаками, проиллюстрированными на одном или более других чертежей для создания вариантов осуществления, которые не проиллюстрированы и не описаны в явном виде. Проиллюстрированные сочетания признаков обеспечивают показательные варианты осуществления для типичных применений. Однако различные комбинации и модификации признаков, совместимых с замыслом настоящего изобретения, могут быть желательны для конкретных применений или реализаций.
Варианты осуществления настоящего изобретения в общем случае предусматривают множество схем или других электрических устройств. Все упоминания схем и других электрических устройств, а также функциональных возможностей, предусмотренные каждым из них, не подразумеваются ограниченными охватом только того, что проиллюстрировано и описано в материалах настоящей заявки. Несмотря на то, что конкретные обозначения могут быть предназначены для различных схем или других раскрытых электрических устройств, не подразумевается, что такие обозначения должны ограничивать объем действия для схем и других электрических устройств. Такие схемы и другие электрические устройства могут объединяться друг с другом и/или разделяться любым образом на основании конкретного типа электрической реализации, которая желательна. Следует понимать, что любая схема или другое электрическое устройство, раскрытое в материалах настоящей заявки, может включать в себя любое количество микропроцессоров, интегральных схем, устройств памяти (например, флэш-память (FLASH), оперативное запоминающее устройство (ОЗУ, RAM), постоянное запоминающее устройство (ПЗУ, ROM), электрически программируемое постоянное запоминающее устройство (ЭППЗУ, EPROM), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ, EEPROM) или другие пригодные их варианты) и программное обеспечение, которые взаимодействуют друг с другом для выполнения операций, раскрытых в материалах настоящей заявки. Кроме того, любые одно или более из электрических устройств могут быть выполнены с возможностью выполнения компьютерной программы, которая реализована на постоянном машиночитаемом носителе, который запрограммирован для выполнения любого количества описанных функций.
Некоторые системы транспортного средства включают в себя кнопочную панель, имеющую множество отдельных датчиков или кнопок, каждые из которых соответствуют цифровому символу, буквенному символу или комбинации буквенно-цифровых символов. С использованием датчиков кнопочной панели, пользователь может вводить код доступа для доступа к транспортному средству. Код доступа может включать в себя последовательность буквенно-цифровых значений, непрерывный жест, например, жест без отрыва пальца, или последовательность скользящих движений или жестов, например, раздельные скользящие движения по лицевой поверхности датчика, такие как направленное скользящее движение вверх/вниз или влево/вправо. С использованием жестовых кодов доступа пользователь может быть способен рисовать контур или другой рисунок, который может использоваться для аутентификации пользователя транспортным средством. Более того, так как сенсорная панель для скользящих движений не требует цифр или других символов, напечатанных на ней или нанесенных на нее, сенсорная панель также может включать в себя фоновый логотип для улучшения эстетики кнопочной панели и безопасности кода доступа.
Улучшенная кнопочная панель может использовать одну сенсорную панель вместо множества отдельных датчиков, чтобы обеспечить улучшенную эстетику, а также обеспечение дополнительных функциональных возможностей и уменьшенной стоимости системы. Одиночный датчик может использоваться для обнаружения движения. Однако, современные конструкции сенсорной панели не дают возможность определения направления движения. Здесь, раскрыты определенные конструкции сенсорной панели, которые имеют градиент плотности печатных проводников вдоль одной оси, так чтобы сигнал, вырабатываемый датчиком, указывал на направление. Конструкции сенсорной панели могут включать в себя градиент плотности печатных проводников вдоль двух перпендикулярных осей, и область пониженной плотности печатных проводников или пробел плотности печатных проводников вдоль одиночной оси, так чтобы сигнал, вырабатываемый от движения вдоль одной оси был отличим от сигнала, вырабатываемого от движения вдоль другой оси вследствие провала или выброса в сигнале вследствие пробела.
В особенности, такие реализации улучшают безопасность кнопочной панели, так как никакие давние грязные пятна от пальцев на интерфейсе не могут прослеживаться на введенные цифры. Более того, так как сенсорная панель не требует цифр или других символов, напечатанных на сенсорной панели или наложенных на нее, сенсорная панель вместо этого может быть сконструирована таким образом, что она содержит фоновый логотип, такой как логотип в синем овале FORD или логотип LINCOLN, для улучшения эстетики кнопочной панели. В некоторых случаях, кнопочная панель может отображать фоновый логотип, когда кнопочная панель имеется в распоряжении для приема пользовательского ввода, к примеру, когда кнопочная панель подвергается легкому постукиванию, или когда близость пользователя обнаружена транспортным средством (например, через присутствие брелока, с помощью емкостных датчиков транспортного средства, и т. д.).
Как только введен код доступа, например, с помощью многоточечного сенсорного или жестового ввода, сенсорная панель может быть дополнительно выполнена с возможностью отображать меню доступных вариантов выбора, которые могут быть выполнены. В примере, как только введена правильная комбинация или рисунок скользящих прикосновений, сенсорная панель может подсвечиваться, чтобы показывать профиль транспортного средства (например, сбоку или сверху) с конкретными функциями, выделенными для выбора. Эти функции, в качестве некоторых неограничивающих возможностей, могут включать в себя отпирание всех дверей, отпирание конкретной двери, открывание подъемной задней двери, открывание окон транспортного средства и вхождение в сервисный режим. С использованием профиля транспортного средства, пользователь может нажимать на любую из выделенных функций, чтобы вызвать доступные функции. Соответственно, доступ к таким функциям может обеспечиваться пользователю графически вместо необходимости того, чтобы пользователь вспоминал цифровой код или последовательность для выполнения определенных команд (например, удерживал нажатыми конкретные цифровые кнопки для отпирания дверей транспортного средства).
Фиг. 1 иллюстрирует примерную систему 100 бесключевого доступа к транспортному средству 102, имеющую кнопочную панель 122. Система 100 может включать в себя контроллер 104 кузова, имеющий радиочастотный (РЧ) приемопередатчик 106. Брелок 108 может осуществлять связь с радиочастотным приемопередатчиком 106 контроллера 104, используя приемопередатчик 110 брелока, питаемый аккумуляторной батареей 112. Антенна 114 радиочастотного приемопередатчика 106 может принимать радиочастотные сигналы с антенны 116 приемопередатчика 110 брелока и может передавать сигналы в радиочастотный приемопередатчик 106. Механизм 118 отпирания/запирания функционально соединен с контроллером 104. Контроллер 104 выполнен с возможностью управлять механизмом 118 отпирания/запирания, чтобы отпирать/запирать двери транспортного средства 102, в ответ на радиочастотные сигналы, переданные брелоком 108. Исполнительные механизмы 109 окон с электростеклоподъемниками также могут быть функционально соединены с контроллером 104, так чтобы контроллер 104 был выполнен с возможностью побуждать различные окна (например, передние или задние дверные окна с электростеклоподъемниками, механизированные боковые вентиляционные клапаны окон, прозрачные люки в крыше и прозрачные окна в крыше с электроприводом) транспортного средства 102 открываться или закрываться. Брелок 108 может включать в себя один или более элементов 120 управления брелока, таких как переключатель запирания и переключатель отпирания. Соответственно, контроллер 104 управляет механизмом 118 отпирания/запирания, чтобы запирать двери транспортного средства 102, в ответ на нажатие пользователем элемента 120 управления брелока для запирания у брелока 108, и чтобы отпирать двери транспортного средства 102 в ответ на нажатие пользователем элемента 120 управления брелока для отпирания у брелока 108.
Кнопочная панель 122 находится на электрической связи с контроллером 104. Кнопочная панель 122 может быть расположена на наружной части или участке транспортного средства 102. В одном из примеров, кнопочная панель 122 может быть жестко соединена проводами с контроллером 104. В еще одном примере, кнопочная панель 12 может находиться на радиочастотной связи с контроллером 104 (например, через радиочастотную антенну 114). Кнопочная панель 122 включает в себя сенсорную панель 124, выполненную с возможностью принимать пользовательский ввод. В некоторых примерах, сенсорная панель 124 может поддерживать многоточечные сенсорные жесты, позволяя кнопочной панели 122 обнаруживать множество одновременных нажатий пальцами. Дополнительно или в качестве альтернативы, сенсорная панель 124 может поддерживать скользящее движение или другие жесты, позволяя кнопочной панели 122 обнаруживать такие движения, выполняемые пользователем.
В некоторых примерах, кнопочная панель 122 дополнительно может включать в себя отдельное устройство 126 отображения, выполненное с возможностью отображать пользователю текущий символ, введенный в кнопочную панель 122. В других примерах, сенсорная панель 124, дополнительно или в качестве альтернативы, может включать в себя встроенные функциональные возможности отображения на поверхности сенсорной панели 124, например, для отображения логотипа при приеме сенсорного ввода, и/или для отображения профиля транспортного средства или другой графики для содействия выбору функций транспортного средства 102.
В примере, кнопочная панель 122 может передавать команды с помощью проводных сигналов в контроллер 104 в ответ на взаимодействие пользователя с сенсорной панелью 124. В еще одном примере, кнопочная панель 122 может передавать команды с помощью РЧ-сигналов в контроллер 104. Контроллер 104 управляет механизмом 118 отпирания/запирания, чтобы отпирать/запирать двери в ответ на прием команд, например, двух или более сигналов (радиочастотных или проводных), которые соответствуют действительной последовательности буквенных, цифровых или буквенно-цифровых символов.
Брелок 108 может быть реализован в связи с базовой дистанционной системой доступа, системой пассивного доступа и пассивного запуска (PEPS) или пассивной противоугонной системой (PATS). С системой PEPS контроллер 104 может управлять механизмом 118 отпирания/запирания, чтобы отпирать двери в ответ на определение контроллером 104, что брелок 108 находится на заданном расстоянии от транспортного средства 102. В таком случае, брелок 108 автоматически (или пассивно) передает шифрованные радиочастотные сигналы (например, без вмешательства пользователя), для того чтобы контроллер 104 дешифровал (или декодировал) радиочастотные сигналы и определял, находится ли брелок 108 в пределах заданного расстояния и авторизован ли. Должно быть отмечено, что, с реализацией PEPS, брелок 108 также вырабатывает радиочастотные сигналы, которые соответствуют кодированным сигналам запирания/отпирания в ответ на нажатие пользователем элемента 120 управления брелока для запирания или элемента 120 управления брелока для отпирания. В дополнение, с системой PEPS, ключ может быть не нужен для запуска транспортного средства 102. Пользователю, в этом случае, может требоваться нажимать переключатель тормозной педали или выполнять некоторую заданную операцию до нажатия пускового переключателя после того, как пользователь вошел в транспортное средство 102. В реализации PATS брелок 108 может действовать в качестве традиционного брелока для отпирания/запирания транспортного средства 102. В реализации PATS ключ (не показан) как правило нужен для запуска транспортного средства 102. Ключ может включать в себя встроенный в него радиочастотный передатчик, чтобы аутентифицировать ключ для транспортного средства 102.
Контроллер 104 включает в себя устройство 128 аутентификации замка зажигания. Устройство 128 аутентификации замка зажигания также может включать в себя радиочастотный приемник (не показан) и антенну (не показана) для приема радиочастотных сигналов, переданных радиочастотными передатчиками ключей. Должно быть отмечено, что устройство 128 аутентификации замка зажигания может быть реализовано в качестве автономного контроллера (или модуля). Устройство 128 аутентификации замка зажигания выполнено с возможностью аутентифицировать конкретный тип механизма, используемого для запуска транспортного средства 102. Например, с реализацией PATS, ключ вставляется в замок 130 зажигания для запуска транспортного средства 102. В таком случае, радиочастотный передатчик ключа передает радиочастотные сигналы, имеющие шифрованные данные в них, в приемник устройства 128 аутентификации замка зажигания. Устройство 128 аутентификации замка зажигания дешифрует данные для аутентификации ключа до обеспечения пользователю возможности запустить транспортное средство 102.
В реализации PEPS, как отмечено выше, ключ не нужен для запуска транспортного средства 102. В таком случае, устройство 128 аутентификации замка зажигания аутентифицирует радиочастотные шифрованные данные, пассивно передаваемые передатчиком 108a-108n, для обеспечения пользователю возможности запустить двигатель транспортного средства 102. Как отмечено выше, в дополнение к устройству 128 аутентификации, аутентифицирующему радиочастотные шифрованные данные, пользователь может выполнять заданную операцию (например, тянуть ручку двери или открывать дверь, переключать тормозной переключатель или другую операцию) перед нажатием пускового переключателя для запуска транспортного средства 102. Система 100 предполагает некоторое количество иных операций от перечисленных перед нажатием пускового переключателя для запуска транспортного средства 102.
Как упомянуто выше, сенсорная панель 124 может реализовывать многоточечную сенсорную технологию, выполненную с возможностью распознавать многочисленные контакты с пальцами и принимать коды доступа, введенные пользователем. Для ввода цифры, вместо нажатия переключателя кнопочной панели 122, назначенного на цифру, пользователь взамен может одновременно прижимать некоторое количество пальцев к сенсорной панели 124, соответствующее требуемой цифре. Таким образом, чтобы ввести цифру кода доступа, такого как персональный код или заводской код, пользователь может просто касаться сенсорной панели 124 требуемым количеством пальцев в различных местах сенсорной панели 124. Так как код доступа может вводиться через кнопочную панель 122 с использованием произвольных мест от края до края сенсорной панели 124, неавторизованному пользователю может быть трудно узнать код пользователя только посредством ведения наблюдения. Более того, так как сенсорная панель 124 может принимать цифровой ввод согласно количеству касаний или может принимать иной жестовый ввод, цифрам или другим указаниям не нужно размещаться на или возле сенсорной панели 124 кнопочной панели 122, улучшая эстетику кнопочной панели 122.
Фиг. 2A - примерная иллюстрация кнопочной панели 200 транспортного средства. Кнопочная панель 200 транспортного средства может включать в себя первую зону 202, вторую зону 204 и третью зону 206. Первая зона может включать в себя осветитель или подсвечиваемое устройство отображения, которое может отображать изображение или логотип, и может быть связана с отдельным датчиком или областью датчика, общей с первой и второй зоной. Вторая зона может включать в себя осветитель или подсвечиваемое устройство отображения, которое может отображать изображение, и может быть связана с отдельным датчиком или областью датчика, общей с первой и второй зоной. Третья зона может включать в себя устройство отображения для обеспечения обратной связи, такой как состояние системы. Фиг. 2B - примерная иллюстрация кнопочной панели транспортного средства, отображающей данные 210 после приема пользовательского ввода. Отображаемые данные 212 указывают на отсчет счетчика по модулю, индикатор 214, действующий на увеличение счетчика по модулю, индикатор 216 состояния системы кнопочной панели. Индикатор 214 может быть одиночным датчиком, или он может быть двумя датчиками: один для увеличения и один для уменьшения счетчика по модулю. К тому же, индикатор может быть одиночным датчиком с градиентом плотности печатных проводников, так чтобы счетчик по модулю увеличивался на основании направления скользящего движения. Например, скользящее движение вверх увеличивает счетчик, а скользящее движение вниз уменьшает счетчик. Как только отображено требуемое значение по счетчику, пользователь может касаться датчика в первой зоне 212, чтобы ввести такое значение, так что последовательность введенных значений составляла бы код доступа. Когда введенный код доступа соответствует коду ключа, кнопочная панель может отправлять сообщение в контроллер 104 кузова для запирания или отпирания механизма 118.
Фиг. 3A-3H - примерные иллюстрации скользящих движений пользователя, которые может обнаруживать кнопочная панель. Фиг. 3A иллюстрировала бы горизонтальное скользящее движение спереди назад на кнопочной панели, установленной на дверной стойке транспортного средства. Фиг. 3B иллюстрировала бы горизонтальное скользящее движение сзади вперед на кнопочной панели, установленной на дверной стойке транспортного средства. Фиг. 3C иллюстрировала бы вертикальное скользящее движение вверх на кнопочной панели, установленной на дверной стойке транспортного средства. Фиг. 3D иллюстрировала бы вертикальное скользящее движение вниз на кнопочной панели, установленной на дверной стойке транспортного средства. Фиг. 3E иллюстрировала бы скользящее движение вниз и назад на кнопочной панели, установленной на дверной стойке транспортного средства. Фиг. 3F иллюстрировала бы скользящее движение вверх и вперед на кнопочной панели, установленной на дверной стойке транспортного средства. Фиг. 3G иллюстрировала бы скользящее движение вверх и назад на кнопочной панели, установленной на дверной стойке транспортного средства. Фиг. 3H иллюстрировала бы скользящее движение вниз и вперед на кнопочной панели, установленной на дверной стойке транспортного средства. Скользящие движения на кнопочной панели могут переводиться в буквенно-цифровые символы для легкости запоминания, такие как «U» или «1» для вертикального скользящего движения вверх, «D» или «2» для вертикального скользящего движения вниз, «L» или «3» для горизонтального скользящего движения влево, «R» или «4» для горизонтального скользящего движения вправо и «X» или «5» для любого диагонального скользящего движения. В качестве альтернативы, диагональное скользящее движение может классифицироваться индивидуально, к примеру, диагональное скользящее движение сверху и слева вниз и вправо - в качестве «A» или «6», диагональное скользящее движение снизу и слева верх и вправо - в качестве «B» или «7», диагональное скользящее движение сверху и справа вниз и влево - в качестве «C» или «8», а диагональное скользящее движение снизу и справа вверх и влево - в качестве «E» или «9».
Фиг. 4 - примерная иллюстрация бесконтактной сенсорной панели 400, имеющей градиент плотности печатных проводников. Эта примерная иллюстрация показана в общем трапециевидной, но может быть реализована в других формах, таких как квадратная, круглая, прямоугольная, или она может быть бесформенной, чтобы удовлетворять специфичным эстетическим или функциональным требованиям. Панель 400 включает в себя первый печатный проводник 402 и второй печатный проводник 404. Первый печатный проводник 402 и второй печатный проводник 404 являются проводящими печатными проводниками и могут быть сделаны из металлической тонкой фольги, проводящего композита или проводящего полимера. Первый печатный проводник 402 может включать в себя множество первых выводов 406, которые могут находиться вблизи множества вторых выводов 408. Выводы 406 электрически изолированы от выводов 408, обеспечивая возможность емкостной связи между печатными проводниками 402 и 404. Выводы 406 могут перемежаться с выводами 408, чтобы увеличить площадь близости. Конфигурация такова, что электрическое поле, вызванное напряжением, приложенным к первому печатному проводнику 402 и второму печатному проводнику 404, создает сигнал, основанный на изменении емкости между печатными проводниками 402 и 404. К тому же, конфигурация такова, что плотность печатных проводников первого и второго печатных проводников 402 и 404 меняется вдоль первой оси 410. Конфигурация печатных проводников 402 и 404 показана асимметричной относительно второй оси 412, перпендикулярной первой оси 410. Однако, конфигурация печатных проводников 402 и 404 может быть симметричной относительно второй оси 412.
Фиг. 5 - примерное графическое изображение сигнала 500 из бесконтактной сенсорной панели по фиг. 4, основанного на скользящем движении. Этот примерный профиль связан с перемещением объекта через электрическое поле, ближайшего к печатным проводникам 402 и 404, в направлении первой оси 410 на постоянной скорости. Когда объект, ближайший к печатным проводникам 402 и 404, перемещается вдоль первой оси 410, имеется изменение емкости, которое может быть представлено в виде сигнала 502. Сигнал 502 изменяется в соответствии с положением 504 объекта по мере того, как он в общем перемещается вдоль первой оси 410, вследствие градиента плотности печатных проводников. Профиль сигнала показан как 506, и пороговое значение 508 применяется для повышения устойчивости системы и для избежания интерпретации сигнального шума в качестве объекта. Сигнал, пересекающий пороговое значение 508 в точке 510, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или первой стационарной точки 512, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 514 нарастания и связанного изменения сигнала от точки 510 до точки 512. После достижения максимального значения или стационарной точки 512, скорость изменения уменьшается до тех пор, пока сигнал не пересекает пороговое значение 508 в точке 516. Вторая скорость изменения определяется на основании времени 518 спада и связанного изменения сигнала от точки 512 до точки 516. Скорости изменения емкости являются разными между временем 514 нарастания и временем 516 спада вследствие градиента плотности печатных проводников. Если бы направление движения или скользящего движения происходило в противоположном направлении, время нарастания было бы приблизительно равным 516, а время спада было бы приблизительно равным 514. На основании разности скоростей изменения емкости, может определяться направление.
Фиг. 6 - примерная иллюстрация бесконтактной сенсорной панели 600, имеющей градиент плотности печатных проводников и область пониженной плотности печатных проводников. Эта примерная иллюстрация показана в общем трапециевидной, но может быть реализована в других формах, таких как квадратная, круглая, прямоугольная, или она может быть бесформенной, чтобы удовлетворять конкретным эстетическим или функциональным требованиям. Панель 600 включает в себя первый печатный проводник 602 и второй печатный проводник 604. Первый печатный проводник 602 и второй печатный проводник 604 являются проводящими печатными проводниками и могут быть сделаны из металлической тонкой фольги, проводящего композита или проводящего полимера. Первый печатный проводник 602 может включать в себя множество первых выводов 606, которые могут находиться вблизи множества вторых пальцеобразных выступов 608. Выводы 606 электрически изолированы от выводов 608, обеспечивая возможность емкостной связи между печатными проводниками 602 и 604. Выводы 606 могут быть перемежающимися с выводами 608, чтобы увеличить площадь близости. Конфигурация такова, что электрическое поле, вызванное напряжением, приложенным к первому печатному проводнику 402 и второму печатному проводнику 604, создает сигнал, основанный на изменении емкости между печатными проводниками 602 и 604. К тому же, конфигурация такова, что плотность печатных проводников первого и второго печатных проводников 602 и 604 меняется вдоль первой оси 610. Конфигурация печатных проводников 602 и 604 показана асимметричной относительно второй оси 612, перпендикулярной первой оси 610. Однако, конфигурация печатных проводников 602 и 604 может быть симметричной относительно второй оси 612. В этой примерной иллюстрации, область понижения плотности 614 печатных проводников смещена от средней линии первой оси 610. Область пониженной плотности 614 печатных проводников может находиться выше или ниже средней линии.
Фиг. 7A - примерное графическое изображение сигнала 700 из бесконтактной сенсорной панели по фиг. 6, основанного на скользящем движении. Этот примерный профиль связан с перемещением объекта через электрическое поле, ближайшего к печатным проводникам 702 и 704, в направлении первой оси 612 на постоянной скорости. Когда объект, ближайший к печатным проводникам 702 и 704, перемещается вдоль первой оси 612, имеется изменение емкости, которое может быть представлено в виде сигнала 702. Сигнал 702 изменяется в соответствии с положением 704 объекта по мере того, как он в общем перемещается вдоль первой оси 612, вследствие градиента плотности печатных проводников. Профиль сигнала показан как 706, и пороговое значение 708 применяется для повышения устойчивости системы и для избежания интерпретации сигнального шума в качестве объекта. Сигнал, пересекающий пороговое значение 708 в точке 712, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или первой стационарной точки 712, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 714 нарастания и связанного изменения сигнала от точки 710 до точки 712. После достижения максимального значения или стационарной точки 712, скорость изменения уменьшается до тех пор, пока сигнал не пересекает пороговое значение 708 в точке 716. Вторая скорость изменения определяется на основании времени 718 спада и связанного изменения сигнала от точки 712 до точки 716. Скорости изменения емкости являются разными между временем 714 нарастания и временем 716 спада вследствие градиента плотности печатных проводников. Если бы направление движения или скользящего движения происходило в противоположном направлении, время нарастания было бы приблизительно равным 716, а время спада было бы приблизительно равным 714. На основании разности скоростей изменения емкости, может определяться направление.
Фиг. 7B - примерное графическое изображение сигнала 720 из бесконтактной сенсорной панели по фиг. 6, основанного на скользящем движении. Этот примерный профиль связан с перемещением объекта через электрическое поле, ближайшего к печатным проводникам 702 и 704 в направлении второй оси 614 на постоянной скорости. Когда объект, ближайший к печатным проводникам 702 и 704, перемещается вдоль второй оси 614, имеется изменение емкости, которое может быть представлено в виде сигнала 702. Сигнал 702 изменяется, в отношении положения 704 объекта по мере того, как он в общем перемещается вдоль второй оси 614, вследствие градиента плотности печатных проводников. Профиль сигнала показан как 722, и пороговое значение 724 применяется для повышения устойчивости системы и для избежания интерпретации сигнального шума в качестве объекта. Сигнал, пересекающий пороговое значение 724 в точке 726, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или первой стационарной точки 728, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 730 нарастания и связанного изменения сигнала от точки 726 до точки 728. После достижения максимального значения или стационарной точки 728, скорость изменения убывает до тех пор, пока сигнал не достигает второй стационарной точки в 732 выше порогового значения 734, в какой момент скорость изменения увеличивается до третьей стационарной точки в 734. Вторая стационарная точка 732 формирует провал или впадину в профиле 722 сигнала вследствие области пониженной плотности печатных проводников. Одна из реализаций для обнаружения этой впадины может включать в себя поиск локальных минимумов выше порогового значения 724. Это может захватывать точки 728 и 734, давая промежуточное время 738 между двумя максимумами, основанное на двух локальных максимумах выше порогового значения. Альтернативный способ может включать в себя обнаружение всех стационарных точек и обеспечение подсчета стационарных точек. После третьего максимума 734, сигнал будет продолжаться до тех пор, пока он не пересекает пороговое значение в 736 с конечным временем 740 спада между точкой 734 и точкой 736. Аналогично фиг. 7A, скорости изменения емкости являются разными между временем 730 нарастания и временем 738 и 740 спада вследствие градиента плотности печатных проводников. Если бы направление движение скользящего движения происходило в противоположном направлении, время нарастания было бы приблизительно равным 738 и 740 наряду с тем, что время спада было бы приблизительно равным 730. На основании разности скоростей изменения емкости, может определяться направление вдоль второго направления. К тому же, движение вдоль первой оси 712 может отличаться от движения вдоль второй оси 714 вследствие наличия дополнительных стационарных точек 732 и 734. Кроме того, на основании скоростей изменения и времен между стационарными точками, может определяться движение по диагонали к первой и второй осям 412 и 414.
Фиг. 8 - примерная иллюстрация многозоновой бесконтактной сенсорной панели 800, имеющей градиент плотности печатных проводников. Эта примерная иллюстрация показана в общем трапециевидной, но может быть реализована в других формах, таких как квадратная, круглая, прямоугольная, или она может быть бесформенной, чтобы удовлетворять специфичным эстетическим или функциональным требованиям. Панель 800 включает в себя первый печатный проводник 802, второй печатный проводник 804 и третий печатный проводник 806. Первый печатный проводник 802, второй печатный проводник 804 и третий печатный проводник 806 являются проводящими печатными проводниками и могут быть сделаны из металлической тонкой фольги, проводящего композита или проводящего полимера. Первый печатный проводник 802 может включать в себя множество первых выводов 808, которые могут находиться вблизи множества вторых выводов 810. К тому же, множество первых выводов 808, которые могут находиться вблизи множества третьих выводов 812. Выводы 808 электрически изолированы от выводов 810, обеспечивая возможность емкостной связи между печатными проводниками 808 и 810. К тому же, выводы 808 электрически изолированы от выводов 812, обеспечивая возможность емкостной связи между печатными проводниками 808 и 812. Выводы 808 могут перемежаться с выводами 810, чтобы создавать первую зону близости или область чувствительности. К тому же, выводы 808 могут быть перемежающимися с выводами 812, чтобы создавать вторую зону близости или область чувствительности. Конфигурация такова, что электрическое поле, вызванное напряжением, приложенным к первому печатному проводнику 802 и второму печатному проводнику 804, создает первый сигнал, основанный на изменении емкости между печатными проводниками 802 и 804. К тому же, конфигурация такова, что электрическое поле, вызванное напряжением, приложенным к первому печатному проводнику 802 и третьему печатному проводнику 806, создает второй сигнал, основанный на изменении емкости между печатными проводниками 802 и 806. Кроме того, конфигурация такова, что плотность печатных проводников первого и второго печатных проводников 802 и 804 меняется вдоль первой оси 812. К тому же, конфигурация такова, что плотность печатных проводников первого и третьего печатных проводников 802 и 806 меняется вдоль первой оси 812. Конфигурация печатных проводников 802, 804 и 806 показана асимметричной относительно второй оси 814, перпендикулярной первой оси 812. Однако, конфигурация печатных проводников 802, 804 и 806 может быть симметричной относительно второй оси 814.
Фиг. 9A - примерное графическое изображение 900 интенсивности 902 сигнала из многозоновой бесконтактной сенсорной панели по фиг. 8, основанной на скользящем движении, относительно положения 904 объекта вдоль оси. Этот примерный профиль связан с перемещением объекта через электрическое поле, ближайшего к печатным проводникам 802, 804 и 806, в направлении первой оси 814 на постоянной скорости. Когда объект, ближайший к печатным проводникам 802 и 804, перемещается вдоль первой оси 814, имеется изменение емкости, которое может быть представлено в виде первого сигнала 906. Первый сигнал 906 изменяется в отношении положения 904 объекта по мере того, как он в общем перемещается вдоль первой оси 814, вследствие градиента плотности печатных проводников. Профиль сигнала показан как 906, и пороговое значение 908 применяется для повышения устойчивости системы и для избежания интерпретации сигнального шума в качестве объекта. Сигнал, пересекающий пороговое значение 908 в точке 910, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или первой стационарной точки 912, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 914 нарастания и связанного изменения сигнала от точки 910 до точки 912. После достижения максимального значения или стационарной точки 912, скорость изменения уменьшается до тех пор, пока сигнал не пересекает пороговое значение 908 в точке 916. Вторая скорость изменения определяется на основании времени 918 спада и связанного изменения сигнала от точки 912 до точки 916. Скорости изменения емкости являются разными между временем 914 нарастания и временем 916 спада вследствие градиента плотности печатных проводников. Если бы направление движения или скользящего движения происходило в противоположном направлении, время нарастания было бы приблизительно равным 918, а время спада было бы приблизительно равным 914. На основании разности скоростей изменения емкости, может определяться направление. Подобным образом, профиль второго сигнала 920 может сравниваться с первым сигналом 906. На основании разности пиковых значений и отношения пикового значения к временам нарастания и спада, могут определяться положение, в котором начиналось скользящее движение, и угол скользящего движения, так что скользящее движение поверх первой зоны отличимо от скользящего движения поверх средней части панели и скользящего движения поверх второй зоны.
К тому же, сигнал 920, пересекающий пороговое значение 908 в точке 922, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или второй стационарной точки 924, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 926 нарастания и связанного изменения сигнала от точки 922 до точки 924. После достижения максимального значения или стационарной точки 924, скорость изменения уменьшается до тех пор, пока сигнал не пересекает пороговое значение 908 в точке 928. Еще одна скорость изменения определяется на основании времени 930 спада и связанного изменения сигнала от точки 924 до точки 928. Скорости изменения емкости являются разными между временем 926 нарастания и временем 930 спада вследствие градиента плотности печатных проводников. Если бы направление движения или скользящего движения происходило в противоположном направлении, время нарастания было бы приблизительно равным 930, а время спада было бы приблизительно равным 926.
Фиг. 9B - примерное графическое изображение сигнала 990 из бесконтактной сенсорной панели по фиг. 8, основанного на скользящем движении. Этот примерный профиль связан с перемещением объекта через электрическое поле, ближайшего к печатным проводникам 802 и 804, в направлении второй оси 816 на постоянной скорости. Когда объект, ближайший к печатным проводникам 802 и 804, перемещается вдоль второй оси 816, имеется изменение емкости, которое может быть представлено в виде сигнала 936. Сигнал 932 изменяется в отношении положения 934 объекта по мере того, как он в общем перемещается вдоль второй оси 816, вследствие градиента плотности печатных проводников. Профиль сигнала показан как 932, и пороговое значение 938 применяется для повышения устойчивости системы и для избежания интерпретации сигнального шума в качестве объекта. Сигнал, пересекающий пороговое значение 938 в точке 940, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или первой стационарной точки 942, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 944 нарастания и связанного изменения сигнала от точки 940 до точки 942. После достижения максимального значения или стационарной точки 942, скорость изменения уменьшается до тех пор, пока сигнал не пересекает пороговое значение 938 в точке 946. Вторая скорость изменения определяется на основании времени 948 спада и связанного изменения сигнала от точки 942 до точки 946. Скорости изменения емкости могут быть разными между временем 944 нарастания и временем 948 спада на основании конструкции сенсорной панели, однако, конструкция может быть симметричной вдоль второй оси 816.
К тому же, этот примерный график иллюстрирует перемещение объекта через электрическое поле, ближайшего к печатным проводникам 802 и 806, в направлении второй оси 816 на постоянной скорости. Когда объект, ближайший к печатным проводникам 802 и 806, перемещается вдоль второй оси 816, имеется изменение емкости, которое может быть представлено в виде сигнала 932. Сигнал 932 изменяется в отношении положения 934 объекта по мере того, как он в общем перемещается вдоль второй оси 816, вследствие градиента плотности печатных проводников. Профиль сигнала показан как 950, и пороговое значение 938 применяется для повышения устойчивости системы и для избежания интерпретации сигнального шума в качестве объекта. Сигнал, пересекающий пороговое значение 938 в точке 952, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или первой стационарной точки 954, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 956 нарастания и связанного изменения сигнала от точки 952 до точки 954. После достижения максимального значения или стационарной точки 954, скорость изменения уменьшается до тех пор, пока сигнал не пересекает пороговое значение 938 в точке 958. Вторая скорость изменения определяется на основании времени 960 спада и связанного изменения сигнала от точки 954 до точки 958. Скорости изменения емкости могут быть разными между временем 956 нарастания и временем 960 спада на основании геометрии конструкции сенсорной панели. Конструкция с двумя панелями позволяет отличать скользящее движение вдоль второй оси 816 от скользящего движения в горизонтальном направлении на основании времени 962 задержки между первым профилем 936 и вторым профилем 950. На основании первого профиля 936, второго профиля 950 и времени 962 задержки, может определяться угол скользящего движения.
Фиг. 9C - примерное графическое изображение 1000 сигналов из многозоновой бесконтактной сенсорной панели по фиг. 8, основанных на скользящем движении по диагонали к градиенту плотности печатных проводников. Эти сигналы указывают диагональное движение, имеющее направление от угла панели в первой зоне, в которой градиент печатных проводников высок, до угла панели во второй зоне, в которой градиент печатных проводников низок. Этот примерный профиль связан с перемещением объекта через электрическое поле, ближайшего к печатным проводникам 802 и 804, в направлении по диагонали первой оси 814 на постоянной скорости. Когда объект, ближайший к печатным проводникам 802 и 804, перемещается вдоль диагональной траектории относительно первой оси 814, имеется изменение емкости, которое может быть представлено в виде сигнала 1002. Сигнал 1002 изменяется в отношении положения 1004 объекта по мере того, как он в общем перемещается относительно первой оси 814, вследствие градиента плотности печатных проводников. Профиль сигнала показан как 1006, и пороговое значение 1008 применяется для повышения устойчивости системы и для исключения интерпретации сигнального шума в качестве объекта. Сигнал, пересекающий пороговое значение 1008 в точке 1010, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или первой стационарной точки 1012, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 1014 нарастания и связанного изменения сигнала от точки 1010 до точки 1012. После достижения максимального значения или стационарной точки 1012, скорость изменения уменьшается до тех пор, пока сигнал не пересекает пороговое значение 1008 в точке 1016. Вторая скорость изменения определяется на основании времени 1018 спада и связанного изменения сигнала от точки 1010 до точки 1016. Скорости изменения емкости являются разными между временем 1014 нарастания и временем 1016 спада вследствие градиента плотности печатных проводников. Если бы направление движения или скользящего движения происходило в противоположном направлении, время нарастания было бы приблизительно равным 1016, а время спада было бы приблизительно равным 1014. На основании разности скоростей изменения емкости, может определяться направление.
К тому же, этот примерный профиль связан с перемещением объекта через электрическое поле, ближайшего к печатным проводникам 802 и 804, в направлении по диагонали к первой оси 814 на постоянной скорости. Когда объект, ближайший к печатным проводникам 802 и 804, перемещается вдоль первой оси 814, имеется изменение емкости, которое может быть представлено в виде сигнала 802. Сигнал 1002 изменяется в отношении положения 1004 объекта по мере того, как он в общем перемещается по диагонали относительно первой оси 814, вследствие градиента плотности печатных проводников. Профиль сигнала показан как 1020, и пороговое значение 1008 применяется для повышения устойчивости системы и для избежания интерпретации сигнального шума в качестве объекта. Сигнал, пересекающий пороговое значение 1008 в точке 1022, может вводить в действие таймер для измерения времени, необходимого, чтобы сигнал достигал максимального значения или первой стационарной точки 1024, в которой скорость изменения емкости равна нулю или неизменна. Первая скорость изменения определяется на основании времени 1026 нарастания и связанного изменения сигнала от точки 1022 до точки 1024. После достижения максимального значения или стационарной точки 1024, скорость изменения уменьшается до тех пор, пока сигнал не пересекает пороговое значение 1008 в точке 1028. Вторая скорость изменения определяется на основании времени 1030 спада и связанного изменения сигнала от точки 1024 до точки 1028. Скорости изменения емкости являются разными между временем 1026 нарастания и временем 1030 спада вследствие градиента плотности печатных проводников. Если бы направление движения или скользящего движения происходило в противоположном направлении, время нарастания было бы приблизительно равным 1030, а время спада было бы приблизительно равным 1026. На основании разности скоростей изменения емкости, может определяться направление. Задержка 1032 может определяться с использованием первого пересечения в точке 1010 и второго пересечения в точке 1022. На основании задержки 1032, первого профиля 1006 и второго профиля 1020, могут определяться угол и направление скользящего движения.
При том что выше описаны примерные варианты осуществления, не предполагается, что эти варианты осуществления описывают все возможные формы, на которые распространяется формула изобретения. Слова, используемые в описании изобретения, являются описательными, а не ограничивающими словами, и следует понимать, что могут быть внесены различные изменения, не выходящие за рамки сущности и объема изобретения. Как описано выше, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в явном виде. При том, что различные варианты осуществления могут быть описаны как обеспечивающие преимущества или являющихся предпочтительными по отношению к другим вариантам осуществления или реализациям из уровня техники в отношении одной или более требуемых характеристик, специалистам в данной области техники будет понятно, что может иметь место компромисс в отношении одного или более признаков или характеристик для достижения требуемых общих свойств системы, которые зависят от конкретного применения и реализации. Эти свойства могут включать в себя, не ограничиваясь: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т д. По существу, варианты осуществления, описанные как менее желательные, чем другие варианты осуществления, или реализации из уровня техники по отношению к одной или более характеристикам, не выходят за пределы объема изобретения и могут быть желательными для конкретных применений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ НАПРАВЛЕННОГО БЕСКОНТАКТНОГО ПЕРЕКЛЮЧАТЕЛЯ | 2015 |
|
RU2682091C2 |
| УЗЕЛ БЕСКОНТАКТНЫХ ПЕРЕКЛЮЧАТЕЛЕЙ, ИМЕЮЩИЙ ТАКТИЛЬНУЮ ОБРАТНУЮ СВЯЗЬ, И СПОСОБ | 2016 |
|
RU2693574C2 |
| СПОСОБ АКТИВАЦИИ БЕСКОНТАКТНОГО ПЕРЕКЛЮЧАТЕЛЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2669655C2 |
| УЗЕЛ БЕСКОНТАКТНЫХ ДАТЧИКОВ И УЗЕЛ БЕСКОНТАКТНЫХ ПЕРЕКЛЮЧАТЕЛЕЙ | 2016 |
|
RU2711607C2 |
| СИСТЕМА ПОДСВЕТКИ ДВЕРИ И ПРЕДУПРЕЖДЕНИЯ | 2016 |
|
RU2709373C2 |
| БЕСКОНТАКТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ И СПОСОБ ЕГО АКТИВАЦИИ | 2015 |
|
RU2676921C2 |
| ИНТЕРФЕЙС ПЕРЕКЛЮЧАТЕЛЯ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА, ИСПОЛЬЗУЮЩИЙ БЕСКОНТАКТНОЕ СЧИТЫВАНИЕ | 2017 |
|
RU2729127C2 |
| УЗЕЛ БЕСКОНТАКТНОГО ПЕРЕКЛЮЧАТЕЛЯ И УЗЕЛ БЕСКОНТАКТНОГО ПЕРЕКЛЮЧАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2676913C2 |
| ИНДИКАТОР СОСТОЯНИЯ СВЯЗИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2689923C2 |
| СИСТЕМА ПОДСВЕТКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ ПОДСВЕТКИ НАРУЖНОЙ ОБЛАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2702375C2 |
Предложена бесконтактная сенсорная система, содержащая: электрически изолированные и перемежающиеся проводящие передающий и приёмный печатные проводники, при этом плотность печатных проводников изменяется вдоль двух осей таким образом, чтобы скорости изменения одного сигнала емкости от приёмного печатного проводника, связанные с перемещением объекта через электрическое поле, связанное с упомянутыми печатными проводниками, описывали в двух измерениях направление упомянутого перемещения. Также система содержит контроллер для вывода сигнала, указывающего упомянутое направление, на основании упомянутого одного сигнала ёмкости. Достигается доступ к транспортному средству с помощью емкостной сенсорной системы. 5 з.п. ф-лы, 20 ил.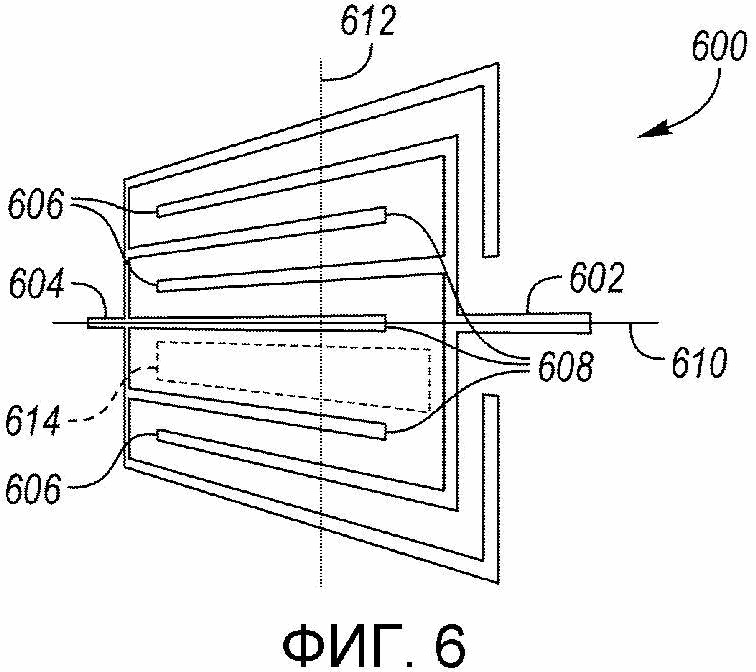
1. Бесконтактная сенсорная система, содержащая:
электрически изолированные и перемежающиеся проводящие передающий и приёмный печатные проводники, при этом плотность печатных проводников изменяется вдоль двух осей таким образом, чтобы скорости изменения одного сигнала емкости от приёмного печатного проводника, связанные с перемещением объекта через электрическое поле, связанное с упомянутыми печатными проводниками, описывали в двух измерениях направление упомянутого перемещения; и
контроллер для вывода сигнала, указывающего упомянутое направление, на основании упомянутого одного сигнала ёмкости.
2. Сенсорная система по п. 1, дополнительно включающая в себя:
проводящий второй приёмный печатный проводник, смежный с передающим печатным проводником, перемежающийся с ним и электрически изолированный от него.
3. Сенсорная система по п. 2, дополнительно содержащая:
устройство отображения, причём контроллер дополнительно запрограммирован для
приращения счетчика по модулю в ответ на первый сигнал, основанный на первом изменении емкости между передающим и приёмным печатными проводниками,
вывода значения счетчика на устройство отображения,
ввода значения счетчика в память в ответ на второй сигнал, основанный на втором изменении емкости между передающим и вторым приёмным печатными проводниками, чтобы сформировать код доступа, и
отпирания системы дверного замка на основании кода доступа, соответствующего коду ключа.
4. Сенсорная система по п. 2, в которой контроллер дополнительно запрограммирован для
формирования кода доступа в ответ на последовательность скользящих движений, причем каждое скользящее движение основано на втором сигнале, являющемся изменением емкости между передающим и вторым приёмным печатными проводниками, и
отпирания дверного замка на основании кода доступа, соответствующего коду ключа.
5. Сенсорная система по п. 1, в которой передающий и приёмный печатные проводники определяют структуру, которая асимметрична.
6. Сенсорная система по п. 5, в которой структура является трапециевидной, квадратной или круглой.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

