Изобретение относится к атомному машиностроению, а именно, к устройствам подъема и перемещения упавших предметов ядерного реактора, в частности, упавших тепловыделяющих сборок в водонаполненных бассейнах выдержки, реакторе, хранилищах отработанного ядерного топлива без осушения и полной выгрузки ядерного топлива.
Известно устройство для подъема и перемещения предметов ядерного реактора, включая подъем и перемещение упавших предметов, содержащее грузоподъемное устройство, с захватом, установленным в повторяющую по форме корпус предмета головку и раздвижные лапки, управляемые штоком, при этом раздвижные лапки установлены на оси между щек втулки, в свою очередь установленной и зафиксированной на валу, размещенном между щек вилки, расположенных перпендикулярно щекам втулки, вилка снабжена хвостовиком, закрепленным в головке, с возможностью вращения вилки, раздвижные лапки выполнены высотой, превышающей высоту верхнего наконечника упавшего предмета, выходящего за пределы корпуса, и снабжены радиусными губкам.
(RU 2553277, G21C 19/32, опубликовано 10.06.2015)
Недостатком известного устройства является его пониженная эксплуатационная надежность. Кроме того, устройство сложно в эксплуатации, поскольку для осуществления захвата упавшего предмета необходимо дополнительно использовать копирующий манипулятор для вращения резьбовой втулки, перемещающей раздвижные лапки друг к другу.
Наиболее близким по технической сущности является устройство для подъема и перемещения для подъема и перемещения, содержащее установленную над местом нахождения упавшего предмета, например, приемным бассейном, подвижную платформу с ходовой частью, грузоподъемное устройство, защитный стакан, имеющий открытую со стороны бассейна полость, и захват, установленный в полости защитного стакана, причем защитный стакан присоединен к нижней части штанги, установленной на грузоподъемном устройстве, захват снабжен приводом с возвратно-поступательным движением штока, размещенном в полости защитного стакана, а лапки захвата установлены на подпружиненных поворотных осях и при втянутом положении штока привода образуют по внутреннему диаметру сечение, равное сечению головки отработавшей тепловыделяющей сборки. Известное устройство обеспечивает захват и извлечение тепловыделяющих сборок (ТВС), упавших на дно бассейна.
(RU 2418329, G21C19/10, опубликовано 10.05.2011).
Недостатком известного технического решения является его пониженная эксплуатационная надежность из-за использования в качестве привода захвата пневмоцилиндра, работоспособность которого зависит от наличия, исправности и герметичности линии подачи сжатого воздуха. Это связано с тем, что существует вероятность расцепления захвата под действием веса ТВС и/или при повреждении (неплотности) линии подачи сжатого воздуха, вследствие чего шток привода самопроизвольно переместится вниз под действием собственного веса и захват окажется в положении «открыто». Кроме того, известное устройство требует предварительной установки вручную угла наклона захвата относительно положения головки ТВС непосредственно в момент зацепления упавшей ТВС. Это также снижает эксплуатационную надежность известного устройства.
Задачей и техническим результатом изобретения является повышение эксплуатационной надежности, а также обеспечение возможности регулирования положения захвата устройства, исключающего повреждение предмета в момент зацепления.
Технический результат достигают тем, что устройство для извлечения упавших предметов ядерного реактора содержит подвижную платформу с грузоподъемным устройством, привод, вертикальную полую штангу, соединенную со средством захвата, включающем лапки захвата, соединенные с поворачиваемыми рычагами шарнирным соединением, причем устройство дополнительно содержит опорную раму, с размещенным на ней снабженным тросами-тягами приводом, которая соединена в верхней части с грузоподъемным устройством, а в нижней части - с неподвижной полой секцией штанги, выполненной телескопической, при этом подвижная секция штанги соединена с тросом-тягой перемещения ее по вертикали и в нижней части соединена со средством захвата, которое включает полый корпус с прорезью, снабженный в нижней ее части общей осью двух рычагов и размещенным внутри перемещаемым тросом-тягой по вертикали подвижным грузом, который в нижней части выполнен с двумя горизонтальными осями, размещенными в пазах двух рычагов на общей оси и поворачивающими рычаги при перемещении подвижного груза, причем лапки захвата, образуют шарнирное соединения с рычагами и на концах имеют соединение с тросами-тягами для их поворота.
Технический результат также достигают тем, что привод выполнен в виде блока, включающем четыре вращаемых барабана с тросами-тягами, соединенными соответственно с подвижной секцией телескопической штанги, с подвижным грузом, с одним концом пары лапок захвата, с другим концом пары лапок захвата.
Кроме того, в блоке привода каждый барабан может быть соединен с приводным зубчатым колесом посредством фиксатора и снабжен ручным тормозом, при этом зубчатые колеса барабанов могут быть связаны между собой, а также с ручными маховиками и редуктором.
Использование в устройстве по изобретению более надежного механического привода, в котором отсутствуют пневматические компоненты, повышает эксплуатационную надежность устройства для извлечения упавших предметов ядерного реактора.
Выполнение средства захвата полым, использование подвижного груза, размещенного груза в полости захвата, снабжение подвижного груза двумя осями, с возможностью перемещения указанных осей по пазам рычагов, снабжение рычагов криволинейными пазами, шарнирное закрепление рычагов на одной общей оси, шарнирное соединение лапок захватов с рычагами обеспечивает срабатывание захвата при нахождении управляющего груза внизу, что приводит к снижению вероятности расцепления захватов и повышает надежность фиксации в захвате извлекаемого предмета. Это также повышает эксплуатационную надежность созданного результата интеллектуальной деятельности.
Сущность изобретения поясняется на фигурах 1-6, где:
- фиг. 1 - общий вид устройства по изобретению с упавшим предметом, находящимся в горизонтальном положении;
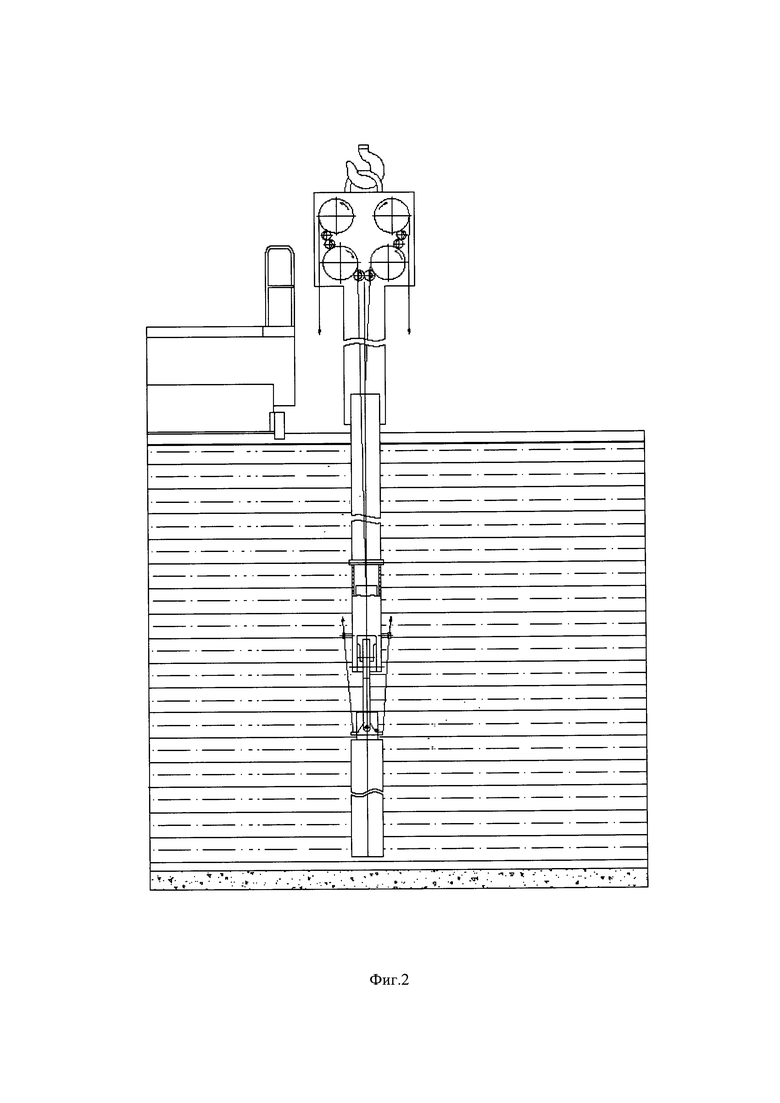
- фиг. 2 - общий вид устройства по изобретению с упавшим предметом, находящимся в вертикальном положении;
- фиг. 3 - привод в виде блока, включающем четыре вращаемых барабана с тросами-тягами;
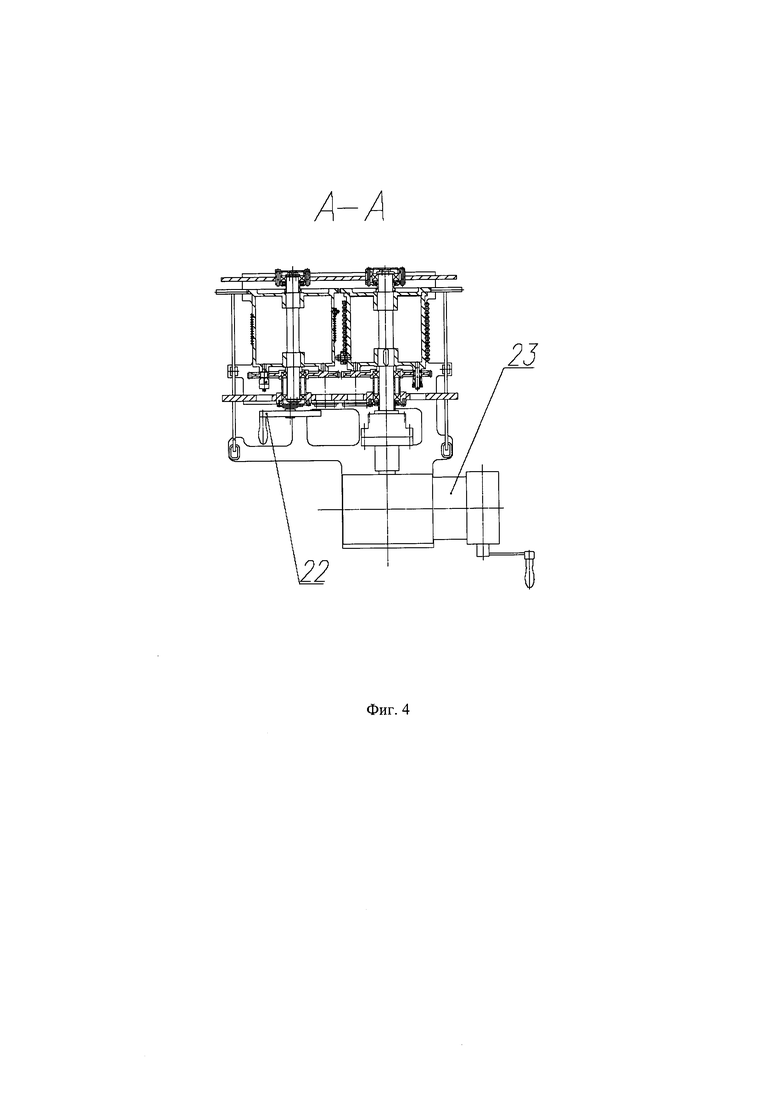
- фиг. 4 - разрез А-А привода фиг. 3;
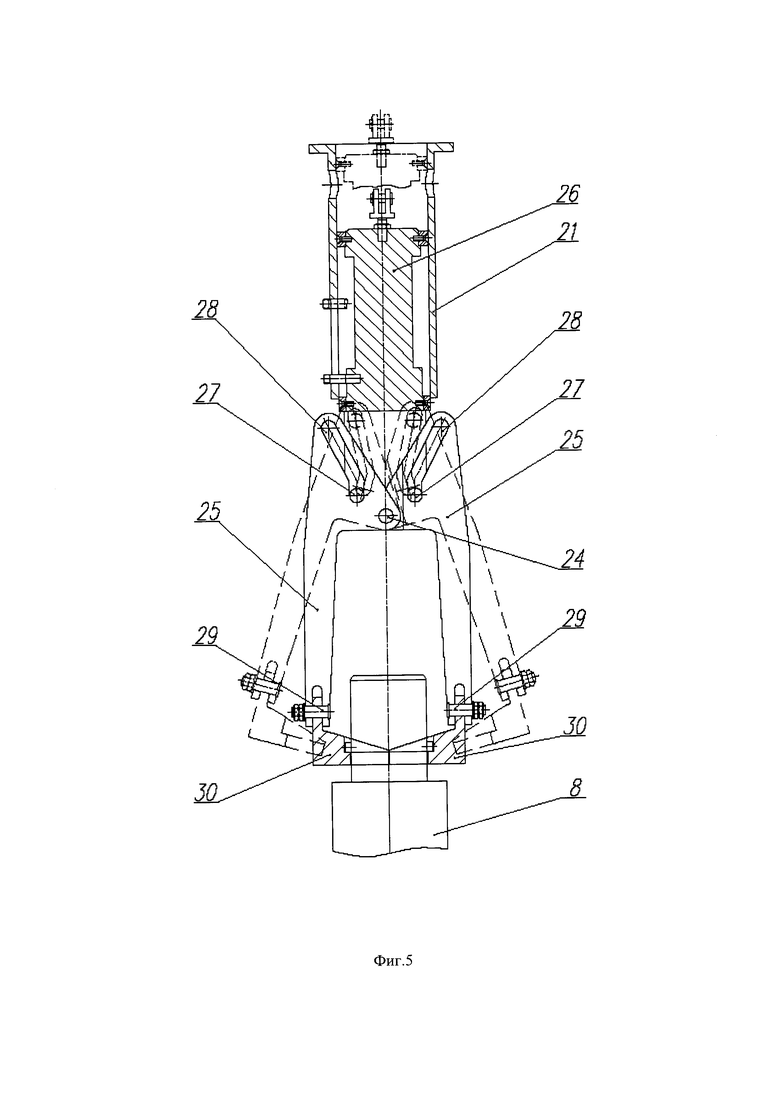
- фиг. 5 - устройство захвата;
- фиг. 6 - устройство захвата в изометрии.
Устройство по изобретению содержит следующие элементы:
1 - подвижная платформа; 2 - грузоподъемное устройство; 3 - опорная рама с приводом; 4 - привод; 5 - неподвижная полая секция вертикальной телескопической штанги; 6 - подвижная полая секция штанги; 7 - средство захвата; 8 - упавший предмет; 9-12 - вращаемые барабаны; 13-16 - тросы-тяги вращаемых барабанов; 17-20 - зубчатые колеса барабанов; 21 - полый корпус средства захвата с прорезью; 22 - маховик; 23 - червячный редуктор; 24 - общая ось двух рычагов; 25 - поворачиваемые рычаги средства захвата; 26 - подвижный груз; 27 - горизонтальные оси подвижного груза; 28 - пазы рычагов; 29 - ось шарнирного соединение рычага и лапки захвата; 30 - лапки захвата.
Устройство для извлечения упавших предметов ядерного реактора содержит (фиг. 1 и 2) подвижную платформу 1, грузоподъемное устройство 2, установленные над местом нахождения упавшего предмета ядерного реактора, например, над бассейном с водой. Грузоподъемное устройство 2 соединено с опорной рамой 3. Опорная рама 3, соединенная в верхней части с грузоподъемным устройством 2, в нижней части соединена с неподвижной полой секцией 5 вертикальной штанги, выполненной телескопической. Подвижная полая секция 6 штанги соединена с тросом-тягой перемещения ее по вертикали, а в нижней части соединена со средством захвата 7, обеспечивающего соединение устройства по изобретению с упавшим предметом ядерного реактора, например, с ТВС (тепловыделяющей сборкой 8).
При этом привод 4 (фиг. 3) выполнен в виде блока, включающем четыре вращаемых барабана 9-12 с тросами-тягами 13-16. Барабаны 9-12 в составе привода 4 установлены на опорной раме 3 с возможностью вращения вокруг собственных осей, которую можно реализовать известными способами и механизмами, например, с использованием зубчатых колес 17-20, приводимых в действие вручную посредством маховиков 22 и червячного редуктора 23 (фиг. 3 и 4).
Трос-тяга 13 одного из барабанов, например, барабана 9, соединен с подвижной секцией 6 вертикальной штанги, обеспечивая при вращении барабана перемещение подвижной секции 6 и соединенного с ней средства захвата 7 по вертикали.
Средство захвата (рабочая головка устройства) 7 (фиг. 5 и 6) включает полый корпус 21 с прорезью, снабженный в нижней ее части общей осью 24 двух рычагов 25, а также связанным трос-тягой, например, трос-тягой 14 с барабаном 10, подвижным грузом 26, размещенным внутри полого корпуса 21.
В нижней части подвижный груз 26 выполнен с двумя горизонтальными осями 27, которые размещены в пазах 28 рычагов 25, которые установлены на общей оси 24.
Средство захвата 7 также содержит лапки захвата 30, соединенные с рычагами 25 шарнирным соединением по оси 29, например -образное шарнирное соединение. Для осуществления поворота вокруг оси 29 лапки захвата 30 на концах снабжены соединением с тросами-тягами, например тросами 15 и 16.
Выполнение вертикальной полой штанги телескопической в сочетании с механическим приводом и средством захвата, позволяющим точно подводить лапки захвата к упавшему предмету при различных углах его положения в пространстве, обеспечивает достижение поставленного технического результата.
Реализацию устройства своего назначения с достижением поставленного технического результата можно проиллюстрировать следующим примером.
Для извлечения упавшего предмета, например, тепловыделяющей сборки (ТВС) со дна бассейна, устройство по изобретению, содержащее подвижную платформу 1, грузоподъемное устройство 2 (типа подъемного крана) располагают вместе (над местом) падения ТВС. При этом опорную раму 3 с приводом 4, вертикальной полой телескопической штангой 5, 6 со средством захвата 7 соединяют с грузоподъемным устройством. При этом наиболее оптимальным соединением является завешивание опорной рамы 3 на крюк грузоподъемного устройства 2.
При этом подвижная полая секция штанги 6 находится в исходном поднятом (транспортном) положении. Все концы тросов-тяг 13-16, намотанные на четыре вращаемых барабана 9-12, соединены соответственно с подвижной секцией 6 телескопической штанги, с подвижным грузом 26, с одним концом пары лапок захвата 15, с другим концом пары лапок захвата 16. Подвижный груз 26 находится в верхнем положении, что обеспечивает максимальное расстояние между лапками захвата 25.
Вращением ручки червячного редуктора 23 поворачивают барабан, связанный тросом-тягой с подвижной секцией 6, опускают секцию 6 до необходимого уровня, при этом все остальные тросы-тяги пойдут вниз.
Для обеспечения надежности фиксации перемещаемых элементов устройства по изобретению блок привода может дополнительно включать фиксаторы барабанов с тросами-тягами и храповики.
Вращением соответствующих барабанов лапки захвата 30 поворачивают на угол, необходимый для зацепления лапок с упавшей ТВС. Поворот лапок захвата 30, образующих  - образное шарнирное соединения с рычагами, происходит вокруг оси 29 в сторону, зависящую от того какими тросами-тягами осуществляют их поворот. При этом устройство по изобретению позволяет осуществить поворот лапок захвата, как по часовой стрелке, так и против часовой стрелки, что обеспечивает точность и безопасность управления захватом.
- образное шарнирное соединения с рычагами, происходит вокруг оси 29 в сторону, зависящую от того какими тросами-тягами осуществляют их поворот. При этом устройство по изобретению позволяет осуществить поворот лапок захвата, как по часовой стрелке, так и против часовой стрелки, что обеспечивает точность и безопасность управления захватом.
После установки лапок захвата в требуемое положение вращением соответствующего барабана опускают на тросе-тяге подвижной груз 26, размещенный внутри полого корпуса 21 с прорезью, снабженный в нижней его части общей осью 24 рычагов 25. При этом происходит перемещение горизонтальных осей 27 подвижного груза в криволинейных пазах 28 рычагов, что приводит к повороту рычагов 25 относительно их общей оси 24 и смыкание лапок захвата 30 на упавшей ТВС.
Контроль за положением лапок захвата 30 и плавность их хода в ходе процесса захвата и извлечения упавшего предмета контролируют визуально, в том числе с использованием телевизионной системы слежения.
После завершения надежного захвата ТВС фиксируют трос-тягу подвижного груза 26 и производят подъем упавшего ТВС.
После установки упавшего предмета 8 на место хранения, произвести расцепление с упавшим предметом в обратной последовательности операции захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ УПАВШИХ ПРЕДМЕТОВ ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2684392C2 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ УПАВШИХ ПРЕДМЕТОВ ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2637498C1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК | 2010 |
|
RU2418329C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК | 2012 |
|
RU2474892C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1992 |
|
RU2086013C1 |
| МАШИНА ДЛЯ ПЕРЕГРУЗКИ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2236052C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2012 |
|
RU2500044C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО И МЕХАНИЗМ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЗАХВАТНЫМ РЫЧАГОВ, ИСПОЛЬЗУЕМЫЙ В НЕМ | 2013 |
|
RU2540977C1 |
| УСТРОЙСТВО ДЛЯ СБОРА ПРОСЫПЕЙ ТАБЛЕТОК ОТРАБОТАВШЕГО ЯДЕРНОГО ТОПЛИВА | 2010 |
|
RU2444798C1 |



Изобретение относится к атомному машиностроению. Устройство для извлечения упавших предметов ядерного реактора содержит подвижную платформу с грузоподъемным устройством, привод, вертикальную полую штангу, соединенную со средством захвата, включающим лапки захвата, соединенные с поворачиваемыми рычагами шарнирным соединением. Устройство дополнительно содержит опорную раму с размещенным на ней снабженным тросами-тягами приводом, которая соединена в верхней части с грузоподъемным устройством, а в нижней части - с неподвижной полой секцией штанги, выполненной телескопической. Подвижная секция штанги соединена с тросом-тягой перемещения ее по вертикали и в нижней части соединена со средством захвата, которое включает полый корпус с прорезью, снабженный в нижней ее части общей осью двух рычагов и размещенным внутри соединенным с тросом-тягой подвижным грузом, который в нижней части выполнен с двумя горизонтальными осями, размещенными в пазах двух рычагов на общей оси и поворачивающими рычаги при перемещении подвижного груза. Лапки захвата образуют шарнирное соединение с рычагами и на концах имеют соединение с тросами-тягами для их поворота. Изобретение позволяет обеспечить возможность регулирования положения захвата устройства, исключающего повреждение предмета в момент зацепления. 1 з.п. ф-лы, 6 ил.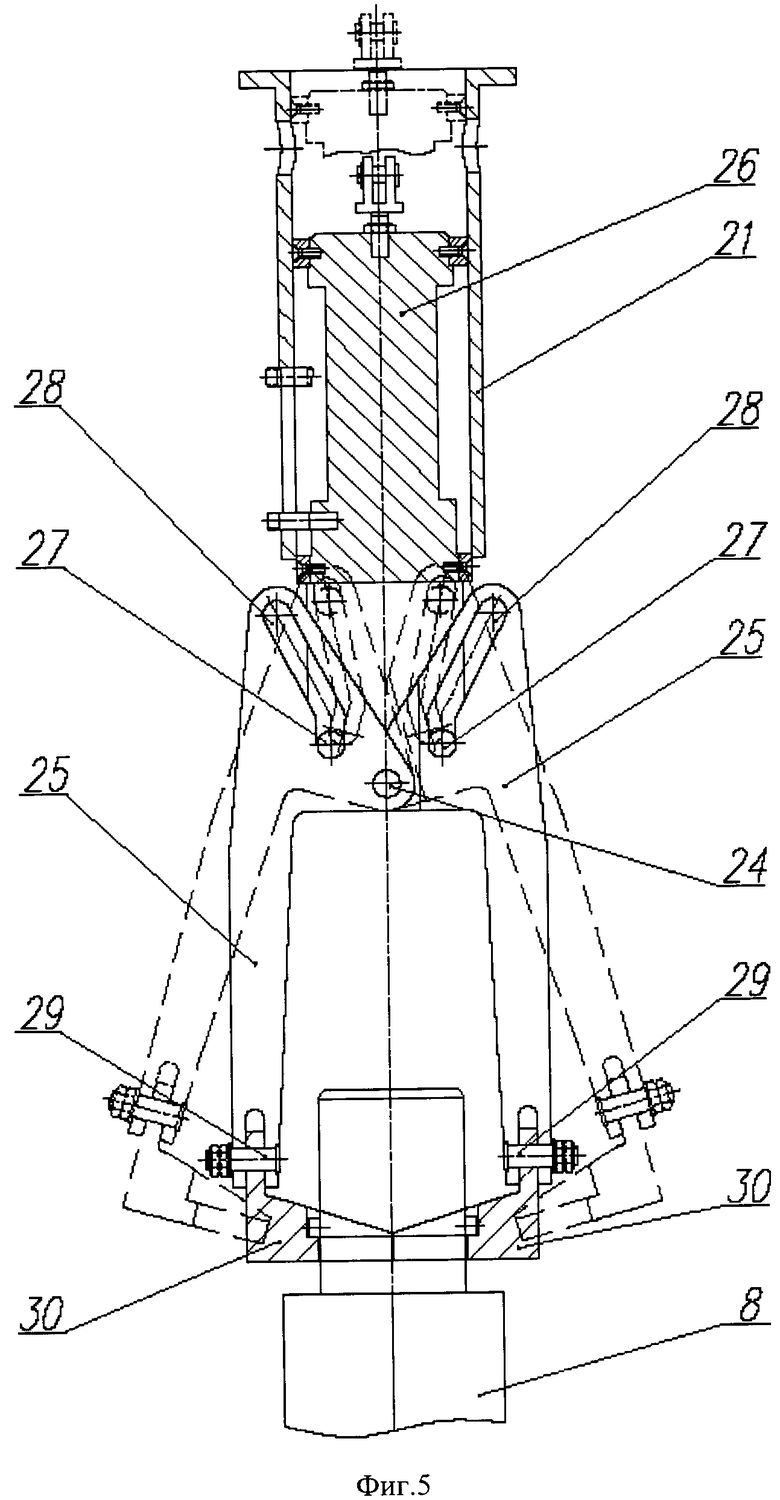
1. Устройство для извлечения упавших предметов ядерного реактора, содержащее подвижную платформу с грузоподъемным устройством, привод, вертикальную полую штангу, соединенную со средством захвата, включающим лапки захвата, соединенные с поворачиваемыми рычагами шарнирным соединением, отличающееся тем, что дополнительно содержит опорную раму с размещенным на ней снабженным тросами-тягами приводом, которая соединена в верхней части с грузоподъемным устройством, а в нижней части - с неподвижной полой секцией штанги, выполненной телескопической, при этом подвижная секция штанги соединена с тросом-тягой перемещения ее по вертикали и в нижней части соединена со средством захвата, которое включает полый корпус с прорезью, снабженный в нижней ее части общей осью двух рычагов и размещенным внутри соединенным с тросом-тягой подвижным грузом, который в нижней части выполнен с двумя горизонтальными осями, размещенными в пазах двух рычагов на общей оси и поворачивающими рычаги при перемещении подвижного груза, причем лапки захвата образуют шарнирное соединение с рычагами и на концах имеют соединение с тросами-тягами для их поворота.
2. Устройство по п. 1, отличающееся тем, что привод выполнен в виде блока, включающего четыре вращаемых барабана с тросами-тягами, соединенными соответственно с подвижной секцией телескопической штанги, с подвижным грузом, с одним концом пары лапок захвата, с другим концом пары лапок захвата.
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК | 2010 |
|
RU2418329C1 |
| Устройство для подъема и фиксации груза | 1977 |
|
SU638540A1 |
| RU 2066488 C1, 10.09.1996 | |||
| US 3945514 A1, 23.03.1976 | |||
| FR 2905030 A1, 22.02.2008. | |||

