ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в общем к валковым прессам, используемым для приложения сжимающих сил к движущимся полотнам для формования, например, бумаги, текстильного материала, пластиковой фольги и т.д. В частности, настоящее изобретение направлено на способы и устройства для измерения и устранения влияния вращательной вариабельности сопряженного вала по профилю давления в зоне контакта и построения синхронизированной карты вращательной вариабельности сопряженного вала, которая будет использоваться для диагностических целей, таких как обнаружение изменений в валах или подшипниках.
ПРЕДПОСЫЛКИ ДЛЯ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Отжимные валы используются в большом числе непрерывных производств, включая, например, изготовление бумаги, производство стали, каландрирование пластиков и печать. В процессе изготовления бумаги необходимы многие стадии для предобразования массы из напорного ящика в бумагу. Начальной стадией является напуск массы из напорного ящика, обычно называемой "бумажная масса" на формующую ткань бумагоделательной машины, обычно называемую "сетка". После напуска часть оборотной воды протекает через отверстия в формующей сетке, оставляя на ней смесь жидкости и волокон. Эта смесь, называемая в отрасли "полотно", может быть обработана оборудованием, которое далее уменьшает содержание влаги в конечном продукте. Сетка постоянно поддерживает волокнистое полотно и переносит ее на другую ткань, называемую сукном, которая перемещает ее через разное обезвоживающее оборудование, которое эффективно удаляет желательный объем жидкости из полотна. Вода из полотна вдавливается в мокрое сукно и затем может быть удалена, когда сукно проходит через всасывающий ящик. Сухие сукна также могут быть использованы для поддержки волокнистого полотна в паровых сушилках.
Одна из стадий обезвоживания осуществляется путем пропускания полотна через пару или больше вращающихся валов, которые составляют валковый пресс или их последовательность, при этом жидкость удаляется из полотна посредством давления, прилагаемого вращающимися валами. При приложении валами силы к полотну и сукну некоторая часть жидкости отжимается из волокнистого полотна в сукно. Затем полотно может быть перемещено в другие прессы или сушильное оборудование, которое далее уменьшает объем влаги в полотне. "Зона контакта" - это область между двумя смежными валами, через которую проходит бумажное полотно. Один вал валкового пресса обычно является твердым стальным валом, а другой выполнен из металлической оболочки, покрытой полимерным материалом. Однако в некоторых конфигурациях оба вала могут иметь покрытие или оба могут быть, твердыми стальными валами. Объем жидкости, удаляемый из полотна, зависит от величины давления, прилагаемого к полотну, когда оно проходит через зону контакта. Последующие валы в процессе и зоны контакта в машинном каландре используются для контроля толщины и других характеристик листа. Характеристики валов могут определять величину давления, прилагаемого к полотну на стадии прессования в зоне контакта.
Одной общей проблемой, связанной с такими валами, может быть отсутствие равномерности давления, распределенного по рабочей длине вала. Давление, прилагаемое валами валкового пресса, часто называют "давление в зоне контакта". Величина давления в зоне контакта, прилагаемого к полотну, и размер зоны контакта могут определять, будут ли достигнуты равномерные характеристики листа. Равномерное давление в зоне контакта по всему валу важно при изготовлении бумаги и вносит свой вклад в содержание влаги, толщину, прочность листа и внешний вид поверхности. Например, отсутствие равномерности давления в зоне контакта часто может приводить к получению бумаги плохого качества. Чрезмерное давление в зоне контакта может привести к разрушению или смещению волокон, а также к появлению отверстий в бумажном продукте. Усовершенствования в нагрузке в зоне контакта могут приводить к повышенной производительности посредством повышенных скоростей машины и меньшему числу поломок (незапланированному времени простоя).
Известные валы для использования в прессовой секции могут быть выполнены из одного или нескольких слоев материала. Деформация вала, обычно из-за прогиба или нагрузки в зоне контакта, может быть источником неравномерности давления и/или неравномерной ширины зоны контакта. Изношенные покрытия валов также могут вносить изменения в давление. Такие валы обычно имеют плавающую оболочку, которая окружает стационарную сердцевину. Под плавающей оболочкой находятся подвижные поверхности, которые могут быть задействованы для компенсации неравномерного давления в зоне контакта.
Известные способы определения присутствия таких расхождений в давлении в зоне контакта требуют от оператора остановить вал и поместить длинный кусок копировальной бумаги или пленки, чувствительной к давлению, в зону контакта. Эта операция известна как получение "оттиска зоны контакта". Более современные способы получения оттисков зоны контакта включают использование майлара с чувствительными элементами для электронной регистрации давления в зоне контакта. Эти операции, хотя и полезные, нельзя использовать, когда валковый пресс работает. Более того, нельзя учитывать температуру, частоту вращения вала и другие связанные с этим изменения, которые влияют на равномерность давления в зоне контакта.
Контрольно-измерительные приборы, связанные с сенсорным валом, могут давать хорошее представление о поперечном давлении в зоне контакта (обычно называемом "профиль давления в зоне контакта" или просто "профиль зоны контакта") и позволяют оператору при необходимости корректировать распределение давления в зоне контакта. Контрольно-измерительные приборы обычно дают графическое отображение в реальном времени профиля давления в зоне контакта на мониторе компьютера. Профиль зоны контакта является компиляцией данных по давлению, которые получены от датчиков, расположенных на сенсорном вале. Он обычно графически показывает сигнал давления в отношении поперечного положения на сенсорном вале. На оси y обычно показано давление в фунтах на линейный дюйм, а на оси x показано поперечное положение на вале.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Один аспект настоящего изобретения относится к системе, связанной с сенсорным валом и сопряженным валом для сбора данных по валам, которые включают первое и второе множества (или даже 3 или больше множеств) датчиков. Первое множество датчиков расположены в распределенных в осевом направлении местах сенсорного вала, причем каждый датчик первого множества входит в область зоны контакта между сенсорным валом и сопряженным валом при каждом обороте сенсорного вала, чтобы генерировать первый сигнал соответствующего датчика. Второе множество датчиков расположены в распределенных в осевом направлении местах сенсорного вала, причем каждый датчик второго множества входит в область зоны контакта при каждом обороте сенсорного вала, чтобы генерировать второй сигнал соответствующего датчика. Каждый датчик первого множества имеет соответствующий датчик во втором множестве, который связан с тем же осевым расположением на сенсорном вале, но отстоит от него по окружности. Система также включает процессор для приема сигнала, полученного с датчика, причем сигнал, принятый с датчика, является одним из первого сигнала датчика или второго сигнала датчика. После приема сигнала, принятого с датчика, процессор выполняет ряд операций. В частности, процессор может а) определить один конкретный из датчиков первого множества или второго множества, который генерировал сигнал, принятый с датчика, b) определить принадлежность одного конкретного датчика на основании того, в какое множество датчиков входит этот датчик, и с) на основании углового положения сопряженного вала относительно контрольного положения определить, какой один из некоторого числа сегментов отслеживания, связанных с сопряженным валом, входит в область зоны контакта по существу одновременно с конкретным одним датчиком, входящим в область зоны контакта. Процессор также может сохранить сигнал, принятый с датчика, используя определенный один сегмент отслеживания и определенную принадлежность.
В соответствующих аспектах изобретения каждый из числа сегментов отслеживания имеет по существу равный с другими размер или разный размер, сигнал, принятый с датчика, включает значение давления, и множество сегментов отслеживания, связанных с сопряженным валом, являются или множеством окружных сегментов на сопряженном вале, или множеством временных сегментов периода сопряженного вала.
В соответствующем аспекте изобретения процессор принимает первый соответствующий сигнал датчика от каждого из датчиков первого множества при каждом обороте сенсорного вала, и второй соответствующий сигнал датчика от каждого из датчиков второго множества при каждом обороте сенсорного вала. Процессор также принимает некоторое множество сигналов датчиков, которые включают множеством первых соответствующих сигналов датчиков и множество вторых соответствующих сигналов датчиков во время некоторого множества оборотов сенсорного вала. В отношении каждого из множества сигналов датчиков процессор идентифицирует: а) его определенный один сегмент отслеживания, b) соответствующий осевой сегмент сопряженного вала и с) конкретный датчик из первого или второго множеств датчиков, который генерировал этот конкретный один из множества сигналов датчиков, причем процессор также определяет принадлежность этого конкретного датчика на основании того, к какому множеству датчиков относится этот конкретный датчик.
В еще одном соответствующем аспекте сопряженный вал включает n осевых сегментов, имеющих соответствующие указательные значения: 1, 2, …, n; сопряженный вал имеет связанные с ним m сегментов отслеживания, имеющих соответствующие указательные значения: 1, 2, …, m, и причем для каждого из первого множества датчиков и второго множества датчиков существуют (n умножить на m) уникальных пермутаций, которые идентифицируются двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания.
В одном соответствующем аспекте изобретения для множества первых соответствующих сигналов датчиков и для каждой из первого множества возможных (n умножить на m) пермутаций процессор определяет среднее значение всех множеств первых соответствующих сигналов датчиков, связанных с осевым сегментом и сегментом отслеживания, совпадающих с каждой из множества пермутаций. Кроме того, для множества вторых соответствующих сигналов датчиков и для каждой из второго множества возможных (n умножить на m) пермутаций процессор определяет среднее значение всех множеств вторых соответствующих сигналов датчиков, связанных с осевым сегментом и сегментом отслеживания, совпадающими с каждой из второго множества пермутаций.
В еще одном соответствующем аспекте изобретения для множества первых соответствующих сигналов датчиков и каждой из первого множества возможных (n умножить на m) пермутаций процессор определяет: а) число раз, которые один или больше из множества первых соответствующих сигналов датчиков связан с осевым сегментом и сегментом отслеживания, совпадающими с этой пермутацией; и b) сумму всех из множества первых соответствующих сигналов датчиков, связанных с этими осевым сегментом и сегментом отслеживания, совпадающими с этой пермутацией. Для множества вторых соответствующих сигналов датчиков и каждой из второго множества возможных (n умножить на m) пермутаций процессор определяет: а) число раз, которые один или больше из множества вторых соответствующих сигналов датчиков связан с осевым сегментом и сегментом отслеживания, совпадающими с этой пермутацией; и b) сумму всех из множества вторых соответствующих сигналов датчиков, связанных с этими осевым сегментом и сегментом отслеживания, совпадающими с этой пермутацией.
В соответствующем аспекте изобретения сопряженный вал включает n осевых сегментов, имеющих соответствующие указательные значения: 1, 2, …, n; период сопряженного вала включает m сегментов отслеживания, имеющих соответствующие указательные значения: 1, 2, …, m, причем для каждого из первого множества датчиков существуют (n умножить на m) уникальных пермутаций, соответственно, которые идентифицируются первой двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания, и для каждого из второго множества датчиков существуют (n умножить на m) уникальных пермутаций, соответственно, которые идентифицируются второй двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания. Соответствующее среднее значение давления связано с каждой из (n умножить на m) уникальных пермутаций каждой из первой и второй групп, причем каждое из соответствующих средних значений давления основано на ранее собранных показаниях давления, относящихся к зоне контакта.
В еще одном соответствующем аспекте среднее значение первого соответствующего столбца связано с каждым указательным значением осевого сегмента первой группы, каждое среднее значение первого соответствующего столбца, включающее среднее значение m соответствующих средних значений давления, от первой группы, связано с этим указательным значением осевого сегмента первой группы; и среднее значение второго соответствующего столбца связано с каждым указательным значением осевого сегмента второй группы, каждое среднее значение второго соответствующего столбца, включающее среднее значение m соответствующих средних значений давления из второй группы, связано с этим указательным значением осевого сегмента второй группы.
В соответствующем аспекте настоящего изобретения процессор работает с каждым из числа принятых сигналов. Для каждого из множества сигналов, принятых с датчиков, который определяет показание давления, процессор: а) определяет указательное значение конкретного осевого сегмента и указательное значение конкретного сегмента отслеживания на основании осевого сегмента, связанного с этим сигналом, его определенный один сегмент отслеживания и то, генерирован ли этот сигнал первым множеством датчиков или вторым множеством датчиков; b) выбирает соответствующее среднее значение давления, связанное с указательным значением конкретного осевого сегмента и указательным значением конкретного сегмента отслеживания; с) вычисляет соответствующее скорректированное среднее значение давления, вычитая одно из среднего значения первого соответствующего столбца или среднего значения второго соответствующего столбца, связанное с указательным значением конкретного осевого сегмента, из выбранного среднего значения давления; и d) вычисляет соответствующее корректируемое показание давления, вычитая скорректированное среднее значение давления из принятого сигнала датчика. Процессор также вычисляет профиль средних значений давления на основании соответствующих скорректированных значений показаний давления.
В еще одном соответствующем аспекте изобретения система включает генератор сигнала, чтобы генерировать запускающий сигнал при каждом обороте сопряженного вала, причем процессор идентифицирует угловое положение сопряженного вала относительно контрольного положения на основании самого последнего генерированного запускающего сигнала.
В соответствующих аспектах настоящего изобретения система включает третье множество датчиков, расположенных в распределенных в осевом направлении местах сенсорного вала, причем каждый датчик третьего множества входит в область зоны контакта между сенсорным валом и сопряженным валом при каждом обороте сенсорного вала, чтобы генерировать третий соответствующий сигнал датчика; и причем каждый датчик третьего множества имеет соответствующий датчик по меньшей мере в одном из первого множества и второго множества, который связан с тем же осевым расположением на сенсорном вале, но отстоит от него по окружности. Процессор также принимает третий соответствующий сигнал датчика. После приема третьего соответствующего сигнала датчика процессор: а) определяет один конкретный из датчиков третьего множества, который генерировал третий соответствующий сигнал датчика, b) определяет принадлежность этого конкретного датчика на основании этого датчика, входящего в третье множество, с) на основании углового положения сопряженного вала относительно контрольного положения определяет, какой один из множества сегментов отслеживания, связанных с сопряженным валом входит в область зоны контакта по существу одновременно с конкретным датчиком третьего множества, входящим в область зоны контакта, и d) сохраняет третий соответствующий сигнал датчика, используя определенный один сегмент отслеживания и определенную принадлежность.
Еще один аспект настоящего изобретения относится к способу, связанному с сенсорным валом и сопряженным валом для сбора данных по валам. Способ включает генерацию первого соответствующего сигнала датчика каждым датчиком из первого множества датчиков, расположенных в распределенных в осевом направлении местах сенсорного вала, причем каждый первый сигнал датчика генерируется, когда каждый датчик первого множества входит в участок зоны контакта между сенсорным валом и сопряженным валом при каждом обороте сенсорного вала; и генерацию второго соответствующего сигнала датчика каждым датчиком второго множества датчиков, расположенных в распределенных в осевом направлении местах сенсорного вала, причем каждый второй сигнал датчика генерируется, когда каждый датчик второго множества входит в область зоны контакта между сенсорным валом и сопряженным валом при каждом обороте сенсорного вала. Каждый датчик первого множества имеет соответствующий датчик во втором множестве, который связан с тем же осевым расположением на сенсорном вале, но отстоит от него по окружности. Способ также включает прием сигнала датчика, причем сигнал, принятый с датчика, является одним из первого сигнала датчика или второго сигнала датчика. После приема сигнала с датчика способ определяет один конкретный из датчиков первого множества или второго множества, который генерировал сигнал, принятый с датчика, определяет принадлежность этого датчика на основании того, к какому из множеств датчиков относится этот конкретный датчик; и на основании углового положения сопряженного вала относительно контрольного положения определяет, какой один из множества сегментов отслеживания, связанных с сопряженным валом, входит в область зоны контакта по существу одновременно с конкретным датчиком, входящим в область зоны контакта. Способ также включает сохранение сигнала, принятого с датчика, с использованием определенного сегмента отслеживания и определенной принадлежности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Хотя описание изобретения включает формулу, пункты которой конкретно описывают и четко заявляют настоящее изобретение, можно полагать, что настоящее изобретение будет лучше понято из нижеследующего описания вместе с прилагаемыми фигурами чертежей, на которых одинаковые ссылочные символы обозначают одинаковые элементы.
Фиг. 1 - схематический вид с торца валкового пресса в соответствии с принципами настоящего изобретения, показывающий формирование полотна, проходящего между валами, при этом ширина зоны контакта валкового пресса обозначена буквами "NW".
Фиг. 2 - вид сбоку сенсорного вала, показывающий расположение линии датчиков в соответствии с принципами настоящего изобретения.
Фиг. 3А-3С показывают прогрессию разных окружных сегментов сопряженного вала, входящих в зону контакта во время оборотов сенсорного вала в соответствии с принципами настоящего изобретения.
Фиг. 4А и 4В показывают таблицу, указывающую, как разные окружные сегменты сопряженного вала отслеживаются датчиками сенсорного вала во время оборотов сенсорного вала в соответствии с принципами настоящего изобретения.
Фиг. 5 - график распределения примера частоты выборки разных окружных сегментов сопряженного вала в соответствии с принципами настоящего изобретения.
Фиг. 6, 7, 8А и 8В показывают матрицы разных значений, которые могут быть вычислены для разных осевых сегментов и окружных сегментов сопряженного вала в соответствии с принципами настоящего изобретения.
Фиг. 9 показывает технологическую схему примера способа генерации в реальном времени профиля среднего давления в соответствии с принципами настоящего изобретения.
Фиг. 10 - схема, показывающая базовую архитектуру конкретной системы контроля и линии обработки бумаги в соответствии с принципами настоящего изобретения.
Фиг. 11 - вертикальная проекция альтернативного сенсорного вала, имеющего две линии датчиков в соответствии с принципами настоящего изобретения.
Фиг. 12 - вид сбоку сопряженного вала с его линией датчиков в соответствии с принципами настоящего изобретения.
Фиг. 13 - технологическая схема одного примера модификации того, как сеанс сбора данных согласно Фиг. 9 может измениться, когда несколько матриц датчиков используются для сбора данных по давлению в зоне контакта в соответствии с принципами настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
В последующем подробном описании предпочтительных вариантов осуществления сделаны ссылки на прилагаемые чертежи, которые являются его частью и на которых показаны для иллюстрации, но не для ограничения, конкретные предпочтительные варианты осуществления, которые могут использоваться для осуществления изобретения на практике. Следует понимать, что могут быть использованы другие варианты осуществления, и что могут быть внесены изменения, но без нарушения сущности и объема настоящего изобретения.
Как показано на Фиг. 1, сенсорный вал 10 и сопряженный вал 11 определяют зону контакта 12 для приема волокнистого полотна 16, чтобы приложить давление к полотну 16. Предполагается, что в некоторых случаях полотно может поддерживать сукно, так что сукно и полотно входят в зону контакта 12. Сенсорный вал 10 включает внутренний основной вал 20 и наружное покрытие 22 вала. Как показано на Фиг. 2, набор 24 датчиков 26 расположен, по меньшей мере частично, в покрытии 22 вала. Набор 24 датчиков 26 может быть расположен по спиральной линии вокруг всей длины вала 10 одним оборотом, чтобы создать винтовую линию, которая является обычной геометрией датчиков для покрытий валов. Однако винтовая линия является просто примером, и может быть предусмотрено любое расположение, в котором по меньшей мере один датчик помещен в каждое осевое положение в любом месте на окружности, в котором будет осуществляться сбор данных. Каждый датчик 26 может, например, измерять давление, оказываемое на датчик, когда он входит в область зоны контакта 12 между валами 10 и 11. В частности, набор 24 датчиков 26 может быть расположен в сенсорном вале 14, например, в разных осевых положениях или сегментов на сенсорном вале 10, причем такие осевые сегменты предпочтительно имеют одинаковые размеры. В показанном варианте осуществления есть 14 осевых сегментов, обозначенных числами 1-14 на Фиг. 2, и каждый имеет расположенный в нем один датчик 26. Также предполагается, что набор 24 датчиков 26 может быть расположен линейно, чтобы определить линию датчиков, т.е., все датчики расположены в одном месте на окружности. Средний специалист легко поймет, что может быть больше четырнадцати или меньше четырнадцати осевых сегментов, а также соответствующее равное число датчиков, расположенных по оси сенсорного вала. Также ниже в описании каждый датчик 26 может быть назван, например, датчиком давления, но предполагаются и другие типы датчиков такие как, например, датчики температуры.
Поскольку при производстве бумаги необходимо равное давление в зоне контакта, правильное вычисление и отображения профиля давления в зоне контакта также очень важно, поскольку любые исправления или изменения, которые будут сделаны а вращающихся валах на основании неточно вычисленного профиля давления в зоне контакта определенно увеличат эксплуатационные проблемы. Существуют три первичных измерения вариабельности. Профиль давления в зоне контакта имеет вариабельность, которая может быть названа поперечной вариабельностью, поскольку она является вариабельностью среднего давления в перекрестном положении в зоне контакта. Еще один тип вариабельности представляет вариабельность скоростных измерений в каждом положении на одной линии датчиков. Эта вариабельность представляет вариабельность другого оборудования в процессе изготовления бумаги, включая вариабельность вращения сопряженного вала, т.е., вала, сопряженного с сенсорным валом. Третий тип вариабельности в профиле зоны контакта включает вариабельность множественных датчиков в каждом поперечном положении вала. Эта вариабельность представляет собой "вариабельность вращения" сенсорного вала, когда он проходит через его множество положений отслеживания.
Обычно сенсорный вал 10 и сопряженный вал 11 имеют разные размеры, т.е., они имеют разные размеры по радиусу и окружности. Каждый вал может иметь изменения в размере по окружности вдоль своей оси. Также, когда вал вращается, расстояние от центральной оси (размер по радиусу) до наружной поверхности может меняться для каждого осевого положения при одинаковом угле поворота, даже когда размеры по окружности должны быть одинаковыми для каждого осевого положения.
Например, валы периодически зачищают, что приводит к небольшим произвольным изменениями в диаметре по сравнению со спецификацией изготовителя. Также может существовать проскальзывание одного или нескольких валов, приводящее к тому, что поверхность сенсорного вала движется со скоростью, отличающейся от поверхности сопряженного вала. Следовательно, два вала редко имеют точно такой же период оборота или имеют периоды, которые являются точными гармониками.
Таким образом, когда сенсорный вал 10 и сопряженный вал 11 совершают многочисленные повороты относительно друг друга, конкретный датчик 26 может не всегда входить в область зоны контакта 12 с той же частью окружности сопряженного вала 11, как это было при предыдущем обороте. Эту характеристику можно использовать для создания таблиц данных, соответствующих поверхности сопряженного вала 11, как сказано ниже. Эти таблицы данных могут включать матрицу средних значений давления, как сказано более подробно ниже со ссылкой на Фиг. 8А. Разные матрицы среднего давления, каждая из которых собрана и построена в разные периоды времени, можно сравнивать между собой, чтобы изучить, как они отличаются одна от другой. Вариабельность между разными таблицами данных может подсказать возможные проблемы с сопряженным валом 11, такие как неравномерность поверхности вала, износ подшипников и прогиб вала. Анализ вариабельности данных с датчиков может указать возможные проблемы с предыдущим или последующим в линии оборудованием, например с предыдущими или последующими валами.
Сенсорный и сопряженный валы 10 и 11 могут быть каждый разделены на 14 осевых сегментов. Все осевые сегменты на сенсорном вале 10 могут иметь или не иметь одинаковую длину, и все осевые сегменты на сопряженном вале 11 также могут быть или не быть одной длины. В показанном варианте осуществления предположено, что все осевые сегменты на сенсорном вале 10 имеют одинаковую длину, и все осевые сегменты на сопряженном вале 11 имеют одинаковую длину. Осевые сегменты на сенсорном вале 10 могут быть совмещены с осевыми сегментами на сопряженном вале 11. Кроме того, сопряженный вал 11 может быть разделен на отдельные окружные сегменты, такие как, например, 50 окружных сегментов, все по существу одного размера.
Со ссылкой на Фиг. 3А-3С, сенсорный вал 10 может быть, например, вращающимся и в какой-то момент времени расположен так, что датчик 26А, расположенный в одном из 14 осевых сегментах в показанном варианте осуществления, будет расположен в области зоны контакта 12 одновременно с окружным сегментом №1 сопряженного вала (из 1-50 сегментов). После первого полного оборота вала 10, один датчик 26А может войти в область зоны контакта 12 одновременно с другим окружным сегментом, например, сегментом №3, на сопряженном вале 11, смотрите Фиг. 3В. Поскольку валы 10 и 11 имеют разные периоды вращения, после второго полного оборота вала 10, один датчик 26А может войти в область зоны контакта 12 одновременно с другим окружным сегментом сопряженного вала, например, сегментом №5, смотрите Фиг. 3С. Поскольку один датчик 26А входит в область зоны контакта 12 одновременно с другими окружными сегментами сопряженного вала 11, давление в зоне контакта, измеренное одним датчиком 26А, может меняться во время последующих оборотов вала из-за изменения в давлении, вызванного сопряженным валом 11. Аспекты настоящего изобретения предусматривают табличные показания или сигналы от каждого датчика 26 из набора 24 через некоторое время, чтобы видеть как меняются показания давления или сигналы для каждого датчика из-за того, что каждый датчик входит в область зоны контакта 12 одновременно с другими окружными сегментами сопряженного вала 11. Как сказано выше, табличные данные могут быть использованы для выявления возможных проблем с сопряженным валом 11 и, как также сказано выше, анализ вариабельности может указать возможные проблемы с предыдущим или последующим рабочим оборудованием кроме сенсорного вала 10 и сопряженного вала 11.
Следовательно, настоящее изобретение предполагает использование датчиков 26 для измерения вариабельности вращения, которая создается при скоростном вращении сопряженного вала 11, когда сигналы давления или показания датчиков 26 синхронизированы во времени с положением сопряженного вала. Для того, чтобы измерить вариабельность вращения, сопряженный вал 11 должен оказывать какое-то влияние на измеряемое давление в зона контакта 12. Главное влияние на отслеживаемое давление в зоне контакта будет, вероятно, заключаться в том, что сопряженный вал 11 прямо прижат к сенсорному валу 10. Однако можно синхронизировать измерения датчиками с предыдущими валами (не показаны), которые формируют еще одну зону контакта и влияют на содержание воды и толщину полотна, которые влияют на давление в зоне контакта, отслеживаемое сенсорным валом 10. Кроме того, поскольку валы (не показаны) в последующей зоне контакта могут натянуть полотно и вызвать изменения в его натяжении, может быть можно также синхронизировать измерения датчикам с такими валами. Сенсорный и сопряженный валы 10 и 11 будут использоваться для иллюстрации принципов настоящего изобретения; однако все принципы применимы к предыдущему и последующему оборудованию в линии, такому как предыдущие и последующие валы.
В качестве одного конкретного примера, сопряженный вал 11 может быть больше по окружности чем сенсорный вал 10. Например, сопряженный вал 11 имеет окружность, которая разделена на 50 окружных сегментов по существу равной длины, и сенсорный вал 10 имеет свою окружность, которая меньше чем окружность сопряженного вала 11. Разница в окружности и проскальзывание вносят разницу в период оборота (период = время, требуемое, чтобы вал совершил один полный оборот) сенсорного вала 10 и сопряженного вала 11. Одним удобным способом охарактеризовать разницу в периодичности является использование единиц измерения, которые используются для измерения разницы во временных сегментах, например, 50 временных сегментов в показанном варианте осуществления. Длина каждого временного сегмента равна периоду сопряженного вала, разделенному на число заданных временных сегментов. Как сказано ниже, заданное число временных сегментов может соответствовать заданному числу окружных сегментов сопряженного вала. Период сенсорного вала 10 может быть описан как на x временных сегментов меньше/больше чем период сопряженного вала 11. Например, сенсорный вал 10 может иметь период, который на 2,14 временных сегментов сопряженного вала меньше чем период сопряженного вала 11 (равно как и сопряженный вал 11 может иметь период, который на 2,14 временных сегментов сопряженного вала больше чем период сенсорного вала). В таком примере, когда сенсорный вал 10 делает один полный оборот, сопряженный вал 11 будет совершать меньше полного оборота на величину, равную 2.14 временных сегментов, из-за того, что он имеет более длительный период чем сенсорный вал 10.
Как сказано выше, 50 временных сегментов периода сопряженного вала могут соответствовать 50 окружным сегментам на сопряженном вале 11. Таким образом, даже если на концептуальном уровне период сопряженного вала 11, который разделен на некоторое число временных сегментов, эта концепция может соответствовать физической окружности сопряженного вала 11, при этом каждый отдельный временной сегмент периода сопряженного вала также соответствует окружному сегменту на сопряженном вале 11. Соответственно, различия в периодах вращения сенсорного вала 10 и сопряженного вала 11, измеренные в единицах "временных сегментов", могут также быть определены в единицах "окружных сегментов". При описании вариантов осуществления настоящего изобретения ниже ссылка на "окружные сегменты" сделана в качестве помощи для понимания аспектов одного примера варианта осуществления настоящего изобретения. Однако средний специалист поймет, что "временные сегменты" и периодичность сопряженного вала также можно использовать, не нарушая объем настоящего изобретения. "Окружные сегменты" и "временные сегменты" также могут именоваться родовым термином "сегменты отслеживания"; этот термин охватывает оба типа сегментов, связанных с сопряженным валом 11.
Как сказано выше, в одном конкретном примере сопряженный вал 11 может быть больше по окружности чем сенсорный вал 10. Например, сопряженный вал 11 может иметь окружность, которая разделена на 50 окружных сегментов про существу равной длины, и сенсорный вал 10 может иметь свою окружность, которая может быть меньше чем окружность сопряженного вала 11. Одним удобным способом охарактеризовать разницу в окружностях является использование единиц измерения, которые используются для измерения величины такой разницы в терминах длины 50 окружных сегментов сопряженного вала. Другими словами, окружность сенсорного вала 10 может быть охарактеризована как на x длин сегментов меньше/больше чем окружность сопряженного вала 11. Например, сенсорный вал 10 может иметь окружность, которая на 2,14 длин окружных сегментов сопряженного вала меньше чем окружность сопряженного вала 11 (соответственно, сопряженный вал 11 может иметь окружность, которая на 2,14 сегментов сопряженного вала больше чем окружность сенсорного вала). В таком примере когда сенсорный вал 10 делает один полный оборот, сопряженный вал 11 совершит меньше полного оборота на величину, равную 2,14 длин окружных сегментов из-за того, что его окружность больше чем окружность сенсорного вала 10, и можно предположить, что части наружной поверхности сенсорного вала 10 и сопряженного вала 11 в зоне контакта 12 будут совпадать со скоростью полотна 16.
Продолжая с данным примером, на Фиг. 4А-4В показано, как данные с датчика для конкретных окружных сегментов (или альтернативно временных сегментов), соответствующие одному осевому положению на сопряженном вале 11 получают для одного конкретного датчика 26 из набора 24. Подобные данные будут собраны для каждого из остальных датчиков 26 из набора 24. Крайний левый столбец 1000 показывает число оборотов сенсорного вала 10. Если предположить, что этот конкретный датчик 26 запускается, когда он находится в области зоны контакта 12 одновременно с окружным сегментом №1 сопряженного вала 11, то после одного оборота датчик 26 войдет в область зоны контакта одновременно с сегментом №3 сопряженного вала 11. Второй столбец 1002 слева показывает число окружных сегментов сопряженного вала 11, которое входит в зону контакта одновременно с датчиком 26 при каждом последующем обороте сенсорного вала 10. Например, после 14 оборотов сегмент №30 (смотрите элемент 1003 на Фиг. 4А) входит в область зоны контакта 12 одновременно с датчиком 26. На Фиг. 4А-4В показаны только первые 50 оборотов; однако для сбора большего объема данных можно использовать любое число оборотов, например, 500 оборотов.
Два крайних правых столбца 1004, 1006 относятся к сбору данных для 500 оборотов сенсорного вала 10. Столбец 1004 указывает каждый из 50 сегментов, и столбец 1006 показывает, какое число сегментов было соответственно выбрано за 500 оборотов. Например, был выбран окружной сегмент №28 сопряженного вала 11 (т.е., в области зоны контакта одновременно с датчиком 26) датчиком 26 №11 (смотрите элемент 1005 на Фиг. 4А) в разное время во время 500 оборотов. На Фиг. 5 приведена таблица распределения, показано сколько раз каждый из 50 окружных сегментов был выбран датчиком 26 за 500 оборотов. В зависимости от разницы в окружности (или периодичности) между сенсорным валом 10 и сопряженным валом 11, число раз выборки каждого из 50 сегментов может меняться.
Как сказано выше, данные, подобные данным на Фиг. 4А-4В получают для каждого датчика 26 из набора 24. Так, когда каждый датчик 26 входит в область зоны контакта 12 и получает показание давления, конкретная часть наружной поверхности сопряженного вала в осевом месте, соответствующем этому датчику, и в одном из 50 окружных сегментов сопряженного вала 11 также будет в зоне контакта 12. Сегмент сопряженного вала, который находится в зоне контакта 12, можно определить разными способами. Один способ включает индексацию конкретного одного из 50 сегментов сопряженного вала с помощью запускающего сигнала, который подается каждый раз, когда сопряженный вал 11 совершает один оборот; период времени с последнего запускающего сигнала можно использовать для определения того, какой из 50 сегментов (измеренный относительно проиндексированного сегмента) находится в зоне контакта 12. Например, если время между каждой подачей запускающего сигнала составляет 275 мс, то каждый временной сегмент составляет 5,5 мс, что соответствует одному из 50 окружных сегментов сопряженного вала. Сигнал давления, генерируемый датчиком 26 в области зоны контакта через 55 мс после запускающего сигнала, будет присвоен временному сегменту 10, поскольку десять сегментов по 5,5 мс прошли, например, область зоны контакта с того момента, когда был подан запускающий сигнал, чтобы генерировать сигнал давления. Фиг. 10 описана ниже в контексте процессора 903, генерирующего в реальном времени профиль зоны контакта. Помимо этого процессор 903 может также принимать запускающий сигнал 901 в связи с вращением сопряженного вала 11. Как было только что сказано, некоторый окружной сегмент или положение 907 сопряженного вала 11 можно проиндексировать или снабдить кодом, так чтобы генератор сигналов 900 детектировал и генерировал запускающий сигнал 901 каждый раз, когда генератор сигналов 900 определит, что сегмент 907 сопряженного вала 11 совершил еще один полный оборот. Когда сопряженный вал 11 повернется так, что окружное положение или сегмент 907 будет совмещен с детекторной частью генератора сигналов 900, один из 50 окружных сегментов, который будет расположен в области зоны контакта, может быть произвольно помечен как первый окружной сегмент, так что другие окружные сегменты могут быть пронумерованы относительно этого первого сегмента. Это конкретное угловое положение сопряженного вала 11 может считаться контрольным положением. Когда сопряженный вал 11 вращается, его угловое положение будет изменяться относительно этого контрольного положения, и величина такого изменения определяет, какой из 50 окружных сегментов будет расположен в области зоны контакта. Соответственно, на основании углового положения сопряженного вала 11 относительно такого контрольного положения можно определить, какой из 50 окружных сегментов находится в области зоны контакта, когда конкретный датчик 26 генерирует сигнал давления.
Существуют другие способы определения положения сопряженного вала 11. Один способ заключается в использовании высокоточного тахометра, который делит вращение вала 11 на число частей, возможно 1000. В данном примере на каждый временной сегмент будет приходиться по 20 частей на высокоточном тахометре. Все способы определения положения сопряженного вала включены в настоящее изобретение.
В примере системы, в которой 14 датчиков осевого размещения 26, каждый из которых может быть уникально обозначен с использованием указательного значения осевого сегмента от 1 до 14, и существует 50 окружных сегментов на сопряженном вале 11 (или временных сегментов), каждый из которых может быть уникально обозначен с использованием указательного значения сегмента отслеживания от 1 до 50, существуют 7000 (т.е., 50×14=7000) уникальных пермутаций пар, состоящих из номера датчика и номера окружного сегмента (или номера временного сегмента), при этом каждая пермутация идентифицируется с помощью двухэлементной группы, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания. В показанном варианте осуществления номера датчиков также соответствуют осевым сегментам сопряженного вала. Поэтому собранные данные могут считаться матрицей 50×14, которая показана на Фиг. 6. Каждая строка на Фиг. 6 представляет один из 50 окружных сегментов сопряженного вала (или временных сегментов), и каждый столбец представляет один из 14 датчиков 26 осевого расположения. Таким образом каждая ячейка представляет одну из возможных 7000 пермутаций. Каждый столбец также соответствует части наружной поверхности сопряженного вала в осевом положении, соответствующем датчику 26, присвоенному этому столбцу. Каждая ячейка представляет комбинацию номера датчика (или номера осевого сегмента) и конкретный окружной сегмент (или временной сегмент) сопряженного вала. Например, ячейка 100 представляет значение, которое будет относиться к показанию давления, полученному, когда датчик номер 14 (номер 14 из датчиков 1-14, входящих в набор 24) вошел в область зоны контакта 12 одновременно с часть наружной поверхности сопряженного вала в осевом положении, соответствующем датчику номер 14 и окружному сегменту номер 1 (или временному сегменту номер 1) сопряженного вала. Таким образом каждая ячейка матрицы представляет уникальную пермутацию из всех возможных пермутаций осевых сегментов с разными номерами (например, 1-14) и окружных сегментов с разными номерами (например, 1-50) (или временных сегментов 1-50). Значение, сохраненное в конкретном элементе матрицы за счет этого связано с одной конкретной пермутацией возможных номеров осевых сегментов и номеров окружных сегментов (или временных сегментов).
Матрица на Фиг. 6 может быть, например, матрицей подсчетов, каждая ячейка которой представляет число раз, которое конкретный датчик и конкретная часть наружной поверхности сопряженного вала в осевом положении, соответствующая этому датчику и конкретному окружному сегменту сопряженного вала, одновременно находились в области зоны контакта 12, чтобы получить показание давления. На Фиг. 7 показана матрица подобного размера (т.е., 50×14), но значения ячеек матрицы отличаются от таковых на Фиг. 6. Ячейка 200 также представляет значение, которое относится к датчику номер 14 (или осевому сегменту 14 из осевых сегментов 1-14 сопряженного вала 11) и окружному сегменту 1, но в данном примере значение является кумулятивным общим показаний давления, например, а фунтах на кв. дюйм, полученных датчиком для этого окружного сегмента во время некоторого множество оборотов сенсорного вала 10. Так, каждый раз когда датчик номер 14 входит в область зоны контакта 12 вместе с окружным сегментом №1, полученное значение давления суммируется с содержанием ячейки 200. Каждая из 7000 ячеек в этой матрице на Фиг. 7 вычисляется аналогичным образом для соответствующих им датчиков и сегментов.
Из матриц на Фиг. 6 и Фиг. 7 можно вычислить матрицу среднего давления, показанную на Фиг. 8А. Например, ячейка 100 включает число показаний давления, связанных с датчиком номер 14 (или осевым сегментом 14 сопряженного вала 11) и окружным сегментом номер 1, а ячейка 200 включает итоговую сумму всех этих показаний давления. Так, если разделить ячейку 200 на ячейку 100, это даст среднее значение давления для этой конкретной пермутацией из номера датчика и номера окружного сегмента сопряженного вала, которые вошли в область зоны контакта 12 одновременно.
В результате, матрица на Фиг. 8А представляет среднее значение давление, которое отслеживается для каждого конкретного номера датчика и номера окружного сегмента сопряженного вала. Продолжительность времени сбора таких данных определяет, сколько разных показаний давления используются в таких вычислениях.
На необработанные показания давления или сигналы от датчиков 26 могут влиять разные компоненты системы, которая перемещает полотно 16. В частности, средние значения в матрице среднего давления на Фиг. 8А относятся к вариабельности, синхронизированной с сопряженным валом 11. Однако могут быть другие компоненты вариабельности, которые не синхронизированы с сопряженным валом 11, такие как вариабельность в поперечном направлении (CD), показанная на Фиг. 2. Одной мерой этой вариабельности является вычисление среднего значения для каждого столбца матрицы среднего давления. Так, матрица среднего давления на Фиг. 8А также может включать строку 302, которая представляет среднее значение для столбца. Каждый из 14 столбцов может иметь 50 ячеек, которые могут быть усреднены для вычисления среднего значения для этого столбца. Например, ячейка 304 будет средним значением для 50 ячеек второго столбца матрицы среднего давления. Как более подробно описано ниже, скорректированное значение ячейки можно вычислить путем вычитания из каждой ячейки в матрице среднего давления ее соответствующего среднего значения для столбца из строки 302. Таким образом, матрица среднего давления на Фиг. 8А включает средние значения давления в каждой ячейке и информацию, необходимую для коррекции этих значений из строки 302.
Альтернативно, средний специалист поймет, что может быть сконструирована полностью отдельная коррекционная матрица (имеющая, например, 7000 элементов или ячеек), которая заполняется уже скорректированными значениями из каждой из ячеек матрицы среднего давления. Таким образом может быть создана коррекционная матрица, которая показана на Фиг. 8В, которая отдельная от матрицы среднего давления на Фиг. 8А. Каждая ячейка (например, ячейка 310) коррекционной матрицы имеет значение, которое основано на соответствующей ячейке (например, 300) матрицы среднего давления. Более конкретно, значение из каждой ячейки матрицы среднего давления корректируется путем вычитания среднего значения из соответствующего столбца, взятого из строки 302, чтобы определить скорректированное значение для запоминания в соответствующей ячейке коррекционной матрицы на Фиг. 8В.
Отдельные сеансы сбора показаний давления для заполнения матриц на Фиг. 6, 7, 8А и 8В могут быть чрезмерно короткими для построения надежных и полных матриц из-за буферизации данных и ограничений по сроку службы аккумуляторов систем сбора данных, связанных с сенсорным валом 10. В таких случаях последовательные сеансы сбора могут быть объединены без обнуления матриц (т.е., матриц подсчетов и матриц суммирования) после начала нового сеанса сбора или объединения отдельных матриц, собранных после события. Следовательно, сбор можно остановить и повторно начать без потери надежности данных, если поддерживается синхронизация сопряженного вала. В частности, объединение нескольких сеансов сбора, которые разделены интервалами времени может быть полезно для наполнения матриц. Например, если разница в периодах между двумя валами были бы ближе к 2,001 вместо 2,14 временных/окружных сегментов, сбор имел бы тенденцию только временных/окружных сегментов с четными номерами в короткий срок (т.е., сегменты с четными номерами это те сегменты, которые имеют четные номера сегментов, начиная от стартового) до достаточного времени, которое прошло до перехода сбора на нечетные временные/окружные сегменты. Объединение сеансов сбора, разделенных длительной задержкой во времени может помочь сдвинуть сбор так, что данные получают более равномерно для всех разных временных/окружных сегментов, поскольку нет ожидания того, что период сопряженного вала совпадет с произвольными интервалами времени между сеансами сбора.
Соответственно, "протокол" сбора данных или множество, например, сеансы сбора данных, проведенные за период в 24 часа, может включать данные из одного или нескольких сеансов сбора данных. Каждый сеанс сбора данных обычно может включать непрерывный сбор данных за короткое время (например, две минуты, пять минут, десять минут и т.д.), который повторяется периодически (например, каждый час). Множество сборов данных может включать все сеансы сбора данных, которые произошли в тот день. Когда начинается каждый новый протокол или набор сбора данных матрица подсчетов и матрица суммирования из самого последнего завершенного множества сбора данных могут быть обнулены, так что данные для нового протокола или множества сбора данных не зависят от ранее собранных данных. Однако матрица средних значений давления и, по выбору, соответствующая коррекционная матрица из самого последнего завершенного множества сбора данных может не обнуляться, а может быть сохранена для использования при каждом из сеансов сбора, которые являются частью нового (т.е., следующего) множества сбора данных. После завершения этого нового множества сбора данных новая матрица среднего давления и коррекционная матрица могут быть вычислены и использованы для перезаписи хранящихся матрицы среднего давления и коррекционной матрицы. Таким образом параметры сопряженного вала, относящиеся к давлению, могут быть собраны и сравнены в другое время, например, для диагностических целей или для возможной корректировки текущих условий эксплуатации валов 10 и 11.
Другие матрицы, которые не показаны, могут быть вычислены на основании данных с датчиков, используемых для построения матриц на Фиг. 6, 7, 8А и 8В. Например, для возведения в квадрат значений давления, использованных для построения матрицы на Фиг. 7, с последующим суммированием этих значений квадратов для построения суммарно квадратической матрицы, которая может быть полезной для разделения вариабельности на поперечную (CD) вариабельность, вариабельность вращения, двухмерную вариабельность и остаточную вариабельность. Разделение вариабельности может быть выполнено для эксплуатационных целей или целей технического обслуживания.
Матрица среднего давления на Фиг. 8А может быть сгенерирована во время множества сеансов сбора в попытке проконтролировать и измерить эксплуатационные характеристики того, как полотно 16 сжимается валами 10 и 11. Данные из матрицы среднего давления на Фиг. 8А или из коррекционной матрицы на Фиг. 8В затем могут быть использованы во время сеанса сбора последующего множества сеансов сбора, чтобы скорректировать необработанные (или полученные в реальном времени) показания давления от датчиков 26 для любого вращательного влияния сопряженного вала 11. В настоящем раскрытии данные отслеженные или поученные датчиком (например, 26), могут быть названы "сигналом" или "показанием" как в "необработанное показание давления", "показание давления, полученное в реальном времени", "сигнал давления" или "сигнал от датчика". Коррекция каждого из необработанных или полученных в реальном времени показаний давления дает соответственно "скорректированное значение показания давления". Эти скорректированные значения показаний давления, полученные в реальном времени, могут быть использованы для инициации или обновления профиля среднего давления в реальном времени для зоны контакта между валами 10 и 11, как будет сказано ниже. В начале каждого нового сеанса сбора профиль среднего давления в реальном времени может быть обнулен. Профиль среднего давления в реальном времени может быть использован для коррекции давлений нагрузки и выпуклости валов или кривизны валов (с использованием, например, внутренних гидроцилиндров) для получения плоского профиля давления.
Как более подробно объяснено в отношении технологической схемы на Фиг. 9, необработанное или полученное в реальном времени показание давления (т.е., сигнал от датчика) может быть получено от каждого датчика 26 каждый раз, когда он входит в зону контакта 12. Как сказано выше, каждое необработанное показание давления или сигнал от датчика могут быть скорректированы с использованием информации по среднему значению давления из матриц на Фиг. 8А и/или Фиг. 8В, чтобы вычислить скорректированное значение показания давления. В частности, эти матрицы могут быть созданы из ранее выполненного множества сбора данных, такого как вчерашнее. Скорректированные значения показаний давления затем могут быть использованы процессором 903 для инициации или обновления профиля среднего давления в реальном времени.
Технологическая схема на Фиг. 9 показывает пример способа генерации профиль среднего давления в реальном времени в соответствии с принципами настоящего изобретения. На этапе 902 начинают сбор данных. Начало сбора данных может произойти, когда сенсорный вал 10 и/или сопряженный вал 11 первый раз вводится в эксплуатацию или может произойти после периода технического обслуживания или другой остановки работы. Соответственно, в некоторых случаях ранее вычисленная и сохраненная матрица среднего давления может быть полезной для коррекции последующих необработанных показаний давления и в других случаях для выполнения сбора данных без использования предыдущих данных по зоне контакта 12.
Так на этапе 904 определяют, существует ли сохраненная матрица среднего давления и использовать ее или нет в текущем процессе сбора данных, начатом на этапе 902. Если матрица среднего давления не существует или если она существует и решено ее не использовать, то на этапе 906 все ячейки матрицы среднего давления обнуляются, чтобы инициализировать матрицу до известного состояния.
В иных случаях значения сохраненной матрицы среднего давления используют так, как сказано ниже. Как сказано выше, может быть полезным иметь записи разных матриц среднего давления, чтобы их можно было сравнить одну с другой для возможного выявления тенденций или проблем, относящихся к техническому обслуживанию или условиям эксплуатации. Таким образом, часть этапа 904 может включать предоставления оператору списка имеющихся матриц среднего давления, которые сохранены, чтобы оператор мог выбрать конкретную матрицу для использования. В показанном варианте осуществления обычно выбирают матрицу среднего давления из предыдущего множества сеансов сбора, т.е., вчерашнего.
В некоторых случаях сбор данных во время множества сеансов сбора может быть прерван по разным эксплуатационным причинам. Поэтому может быть полезно иметь возможность возобновить множество сеансов сбора без начинания с начала и потери всех данных, которые были собраны до прерывания этого множества. На этапе 908 определяют, использовать ли существующие матрицу подсчетов и матрицу суммирования (например, с Фиг. 6 и Фиг. 7) ранее прерванного множества сеансов сбора. Если решено не использовать эти матрицы, то матрица подсчетов и матрица суммирования обнуляются на этапе 910. Если однако решено продолжить множество сеансов сбора, то существующие матрицу подсчетов и матрицу суммирования используют на последующих этапах сбора данных.
Этап 912 начинает новый сеанс сбора путем инициализации или обнуления старого профиля среднего давления в реальном времени. В конце этого нового сеанса сбора будет вычислен новый профиль среднего давления в реальном времени. Профиль среднего давления в реальном времени будет иметь значение для каждого из осевых сегментов сенсорного вала 10, как более подробно сказано ниже.
На этапе 914 необработанные показания давления или сигналы от датчиков будут получены датчиками 26 сенсорного вала 10. В дополнение к самим необработанным показаниям давления соответствующие временные сегменты (или окружные сегменты) сопряженного вала 11 и номера осевых сегментов (например, 1-14) будут собраны для каждого необработанное показание давления. Например, конкретный датчик 26 войдет в область зоны контакта 12 и получит необработанное показание давления. На основании запускающего сигнала 901, описанного выше, также можно определить, какие из 50 окружных сегментов или 50 временных сегментов сопряженного вала 11 также находятся в зоне контакта 12. Таким образом, на основании определенного окружного сегмента и датчика 26, который соответствует конкретному осевому сегменту, может быть идентифицирована одна из 7000 ячеек в каждой из матриц на Фиг. 6 и Фиг. 7. После того, как эти ячейки будут идентифицированы, матрица подсчетов и матрица суммирования могут быть обновлены на этапе 916.
Также, одна из 7000 ячеек сохраненной матрицы среднего давления (например, Фиг. 8А) может быть идентифицирована на основании окружного сегмента и датчика, соответствующих необработанному показанию давления, полученному на этапе 914. Среднее значение давления для этой одной ячейки матрицы может быть выбрано на этапе 917 и скорректировано с использованием ее соответствующего среднего значения столбца (например, из строки 302 на Фиг. 8А). Как сказано выше, коррекция значения ячейки матрицы среднего давления может повлечь вычитание среднего значения соответствующего столбца из значения этой ячейки, чтобы определить скорректированное значение ячейки (т.е., скорректированного значения среднего давления). Это скорректированное значение среднего давления затем можно использовать на этапе 918 для корректировки необработанного показания давления. В частности, скорректированное значение среднего давления из матрицы среднего давления может быть вычтено из необработанного показания давления.
В тех случаях, когда сохраненной матрицы среднего давления нет или используют обнуленную матрицу среднего давления, необработанное показание давления остается без изменений на этапах 917 и 918. Также в тех случаях, когда создана отдельная "коррекционная" матрица отдельно от матрицы среднего давления, этапы 917 и 918 могут быть объединены, чтобы можно было выбрать значение подходящей ячейки непосредственно из "коррекционной" матрицы и использовать для коррекции необработанного показания давления.
Значение с этапа 918 связано с конкретным осевым сегментом сенсорного вала 10 (который идентифицируют на этапе 914) и соответствующим осевым сегментом профиля среднего давления в реальном времени. Таким образом, значение с этапа 918 сохраняют на этапе 920, чтобы можно было вычислить этот профиль среднего давления в реальном времени. Каждый раз необработанное показание давления корректируют, используя скорректированное значение из ячейки матрицы среднего давления, и вычисляют скорректированное значение показания давления или скорректированное необработанное показание давления. Это скорректированное значение показания давления суммируют со всеми другими скорректированными значениями показаний давления для конкретного осевого сегмента, полученного ранее во время текущего сеанса сбора данных и совокупное число ("подсчет") скорректированных значений показаний давления, использованных для построения этой суммы, также сохраняют. Из этих сохраненных данных и в конце сеанса сбора, смотрите этап 924, можно построить среднее значение давления для каждого осевого сегмента профиля среднего давления в реальном времени путем деления этой суммы скорректированных значений показаний давления на совокупное число скорректированных значений показаний давления.
Определение того, закончен ли сеанс сбора, выполняют на этапе 922. Определение на этапе 922 может быть основано на сеансе сбора, длящемся в течение заданного периода времени (например, 5 минут) или основано на сеансе сбора, длящемся в течение заданного числа оборотов сенсорного вала 10 (например, 100 оборотов).
Если на этапе 922 определено, что сеанс сбора завершен, то профиль среднего давления в реальном времени вычисляют и выводят на этапе 924. Если сеанс сбора не завершен однако, то управление возвращается на этап 914 и получают и корректируют больше необработанных показаний давления, чтобы продолжить построение данных для использования в вычислении профиля среднего давления в реальном времени.
Матрица среднего давления (например, Фиг. 8А) может быть построена с использованием данных, собранных за многие сеансы сбора (т.е., за множество сеансов сбора). Как сказано выше, множество сеансов сбора может быть определено как происходящее каждые 24 часа. Так на этапе 926 определяют, завершено ли текущее множество сеансов сбора, например, окончен ли заданный 24-часовой период для текущего сеанса сбора? Если множество сеансов для построения новой матрицы среднего давления не завершено, то на этапе 928 можно определить, продолжать ли процесс получения показаний давления, относящихся к зоне контакта 12. Например, оператор может решить прервать процесс сбора данных по разным причинам, связанным с эксплуатацией. Так на этапе 930 процесс с Фиг. 9 может быть по желанию остановлен; в ином случае на этапе 932 вводится задержка до следующего сеанса сбора из текущего множества на этапе 912. В показанном варианте осуществления каждый сеанс сбора длится в течение заданного периода времени, например, пять минут, и период задержки включает еще один заданный период времени, например, 55 минут.
Если множество сеансов сбора завершено, то на этапе 934 строят матрицу среднего давления для завершенного множества сеансов сбора, используя матрицу подсчетов и матрицу суммирования, которые обновлены на этапе 916. Эта новую матрицу среднего давления затем на этапе 936 сохраняют, чтобы ее значения можно было использовать на этапе 918 для корректировки необработанных показаний давления, полученных во время последующих сеансов сбора нового множества для вычисления других профилей среднего давления в реальном времени. После построения новой матрицы среднего давления соответствующая коррекционная матрица может быть также построена и сохранена. Если такая коррекционная матрица построена и сохранена, то ее значения можно использовать на этапе 918 для корректировки необработанных показаний давления, полученных во время последующих сеансов сбора из нового множества. На этапе 938 перед началом построения новой матрицы происходит задержка для начала нового множества сеансов сбора. Например, эта задержка обычно может быть равна задержке, используемой на этапе 932 (например, 55 минут). После задержки на этапе 938 матрицы подсчетов и суммирования обнуляются на этапе 910 и первый сеанс сбора из нового множества сеансов сбора начинается с этапа 912.
В приведенном выше описании на этапах 917 и 918 необработанное показание давления корректируют, используя коррекционное значение из соответствующей ячейки матрицы на Фиг. 8А с значениями среднего давления для каждой из 7000 возможных пермутаций. Альтернативно может быть выполнено сглаживание данных путем усреднения смежных скорректированных ячеек матрицы на Фиг. 8А перед коррекцией необработанного показания давления. Для упрощения описания возможных подходов сглаживания данных ниже сделана ссылка на отдельную коррекционную матрицу, такую как матрица на Фиг. 8В, где значения в ячейках уже скорректированы с использованием средних значений из подходящего столбца матрицы среднего давления с Фиг. 8А. Например, в каком-то конкретном столбце коррекционной матрицы ячейка будет иметь смежные строки, которые представляют смежные окружные сегменты. Соответственно, пять ячеек (например) могут быть выбраны из коррекционной матрицы - конкретная ячейка (связанная с текущим необработанным показанием давления) и две ячейки выше ее и две ячейки ниже ее. Эти пять значений из этих пяти ячеек могут быть сами усреднены, чтобы вычислить коррекционное значение для вычитания из необработанного показания давления на этапе 918. Сглаживание можно использовать, когда некоторые ячейки в матрице подсчета (Фиг. 6) имеют низкие значения, которые будут вызывать искажение матрицы среднего давления (Фиг. 8А). Если ячейка в матрице подсчета имеет нулевые подсчеты, то вычисленное среднее давление, соответствующее этой ячейке, не может быть выполнено и необходимо сглаживание.
Подобное сглаживание данных может быть также выполнено в осевом направлении. В этом случае могут быть выбраны, например, три ячейки из коррекционной матрицы на Фиг. 8В - конкретная ячейка, связанная с текущим необработанным показанием давления, ячейка слева от нее и ячейка справа от нее. Три значения из этих трех ячеек могут быть усреднены вместе, чтобы вычислить коррекционное значение для вычитания из необработанного показания давления на этапе 918.
На Фиг. 10 показана общая архитектура одной конкретной системы для контроля качества получаемой бумажной продукции. Система на Фиг. 10 включает процессор 903, описанный выше, который определяет систему измерения и управления, которая оценивает и анализирует работу вала 11. Процессор 903 включает любое устройство, которое принимает вводимые данные, обрабатывает эти данные посредством компьютерных команд и генерирует выходные данные. Такой процессор может быть ручным устройством или ноутбуком, настольным компьютером, микрокомпьютером, устройством для цифровой обработки сигнала (DSP), главным компьютером, сервером, другими программируемыми компьютерными устройствами или любым их сочетанием. Процессор 903 также может быть реализован с использованием устройств программируемой логики, таких как логические матрицы, программируемые пользователем (FPGA) или, альтернативно, реализован как специализированные интегральные схемы (ASIC) или подобные устройства. Процессор 903 может вычислять и отображать профиль среднего давления в реальном времени, вычисляемый в конце предшествующего сеанса сбора. Например, сигналы давления от датчиков 26 могут быть посланы на беспроводной приемник 905 с передатчика (или передатчиков) 40, расположенных на сенсорном вале 10. Затем сигналы могут быть направлены процессору 903. Предполагается, что процессор 903, в дополнение к вычислению профиля среднего давления в реальном времени, может использовать профиль среднего давления в реальном времени для автоматической коррекции выпуклости и механизмов загрузки для получения плоского профиля давления. Выпуклость и механизмы загрузки также могут быть скорректированы вручную оператором, использующим информацию из профиля среднего давления в реальном времени.
Как сказано выше, одна выгода введения одного множества датчиков в валы с покрытием заключается в измерении профиля давления в реальном времени и корректировке давлений загрузки и выпуклостей или кривизны валов (с использованием, например, внутренних гидроцилиндров), чтобы получить плоский профиль давления. В качестве альтернативы одному множеству 24 датчиков 26, которое показано на Фиг. 2, на Фиг. 11 показаны два множества или массива 24А, 28 датчиков 126А, 30 на сенсорном вале 102. В показанном варианте осуществления сенсорный вал 102 разделен на 14 осевых сегментов. Первое и второе множества 24А и 28 датчиков 126А и 30, расположены соответственно по меньшей мере частично в покрытии 22 вала. Каждый из первого множества 24А датчиков 126А расположен в одном из 14 осевых сегментов сенсорного вала 102. Подобно этому, каждый из второго множества 28 датчиков 30 расположен в одном из 14 осевых сегментов сенсорного вала 102. Каждый датчик 126А из первого множества 24А имеет соответствующий датчик 30 из второго множества 28, расположенный в том же осевом сегменте сенсорного вала 102. Первое множество 24А датчиков 126А расположено по линии, которая спирально проходит по всей длине вала 102 одним оборотом, чтобы определить винтовую линию. Подобным образом второе множество 28 датчиков 30 расположено по линии, которая спирально проходит по всей длине вала 102 одним оборотом, чтобы определить винтовую линию. Первое и второе множества 24А и 28 датчиков 126А и 30 отделены друг от друга на 180 градусов. Каждый датчик 126А и 30 измеряет давление, оказываемое на датчик, когда он входит в область зоны контакта 12 между валами 102 и 11. Предполагается, что первое и второе множества 24А и 28 датчиков 126А и 30 могут быть расположены линейно, чтобы определить первую и вторую линии датчиков, которые разнесены приблизительно на 180 градусов. Также предполагаются разные альтернативные конфигурации из некоторого множества датчиков. Например, некоторое множество датчиков может быть расположено спирально по линии которая проходит в два оборота по всей длине вала 102.
Предполагая вышеприведенный пример 14 осевых сегментов и 50 окружных сегментов, каждое множество 24А, 28 датчиков 126А, 30 может иметь его собственную соответствующую матрицу из 7000 ячеек для хранения значений. Таким образом, множество 24А датчиков 126А может иметь матрицы для некоторого числа конкретных датчиков 126А и окружных сегментов сопряженного вала в области зоны контакта 12 (например, матрицу подсчета), суммы показаний давления (например, матрицу суммирования), значений среднего давления (например, матрицу средних значений давления) и скорректированных значений среднего давления (коррекционная матрица). Множество 28 датчиков 30 также может иметь свои матрицы для некоторого числа конкретных датчиков 30 и окружных сегментов сопряженного вала в области зоны контакта 12 (например, матрица подсчета), суммы показаний давления (например, матрица суммирования), значений среднего давления (например, матрица средних значений давления) и скорректированных значений среднего давления (например, коррекционная матрица). В каждой из соответствующих ячеек хранится значение, которое связано с конкретным датчиком 126А, 30 и конкретным осевым сегментом и окружным сегментом сопряженного вала. Соответственно, матрицы, подобные показанным на Фиг. 6, 7, 8А и 8В, будут сохранены для каждого из разных множеств датчиков или массивов датчиков 24А, 28. Однако поскольку данные собраны датчиками, разделенными на 180°, разницы между значениями в двух множествах матриц могут содержать информацию по вариабельности вращения сенсорного вала 10.
Так для первого множества 24А датчиков есть 14 размещенных в осевом направлении датчиков 126А, каждый из которых может быть уникально обозначен с использованием указательного значения осевого сегмента, которое расположено в диапазоне от 1 до 14, и есть 50 сегментов отслеживания, связанных с сопряженным валом 11, каждый из которых может быт уникально обозначен с использованием указательного значения сегмента отслеживания в диапазоне от 1 до 50, которые вместе образуют 7000 (т.е., 50×14=7000) уникальных пермутаций пар, состоящих из номера датчика и номера окружного сегмента (или временного сегмента), при этом каждая пермутация идентифицируется первой двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания. Так необработанное показание давления от датчика 126А может быть связано с указательным значением осевого сегмента и указательным значением сегмента отслеживания, которые вместе уникально идентифицируют 1 из 7000 ячеек в каждой из матриц, показанных на Фиг. 6, 7, 8А и 8В, которые связаны с первым множеством 24А датчиков. На основании конкретной пермутаций указательного значения осевого сегмента и указательного значения сегмента отслеживания данные можно добавлять или извлекать из соответствующей ячейки одной из матриц, связанных с первым множеством 24А датчиков.
В дополнение к этим 7000 пермутаций для второго множества 28 датчиков 30 также есть 14 расположенных в осевом направлении датчиков 30, каждый из которых может быть уникально обозначен с использованием указательного значения осевого сегмента в диапазоне от 1 до 14, и также есть 50 сегментов отслеживания, связанных с сопряженным валом 11, каждый из которых может быть уникально обозначен с использованием указательного значения сегмента отслеживания, которые создают 7000 (т.е., 50×14=7000) уникальных пермутаций пар, состоящих из номера датчика и номера окружного сегмента (или временного сегмента), при этом каждая пермутация идентифицируется второй двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания. Так необработанное показание давления от датчика 30 может быть связано с указательным значением осевого сегмента и указательным значением сегмента отслеживания, которые вместе уникально идентифицируют 1 из 7000 ячеек в каждой из матриц, показанных на Фиг. 6, 7, 8А и 8В, которые связаны с вторым множеством 28 датчиков. На основании конкретной пермутаций указательного значения осевого сегмента и указательного значения сегмента отслеживания данные можно добавлять или извлекать из соответствующей ячейки одной из матриц, связанных с вторым множеством 28А датчиков.
Подобно этому, по идее, чтобы иметь два множества 24А, 28 датчиков на сенсорном вале 102 означает наличие одного массива 24 датчиков на сенсорном вале 10 (именуется первым сенсорным валом в данном варианте осуществления), как показано на Фиг. 2, а также наличие сопряженного вала 11А (смотрите Фиг. 12) с массивом 25 датчиков 27, чтобы определить второй сенсорный вал, при этом сопряженный вал 11А заменяет сопряженный вал 11 с Фиг. 2. Таким образом, в дополнение к датчикам 26 также будет присутствовать массив 25 датчиков 27, которые входят в область зоны контакта 12 во время каждого оборота второго сенсорного вала 11А. Как и в случае с двумя массивами 24А, 28 датчиков, соответствующие матрица подсчета, матрица суммирования, матрица среднего давления и коррекционная матрица могут быть построены для первого сенсорного вала 10 и второго сенсорного вала 11А. Одно различие с описанием, приведенным выше, заключается однако в том, что отдельный генератор сигналов 900А и отдельный запускающий сигнал 901А (показан пунктиром на Фиг. 10) также могут быть связаны с первым сенсорным валом 10, так что его период может быть разделен на разные временные сегменты (или окружные сегменты), которые связаны с показаниями давления, когда один из датчиков 27 с сопряженного или второго сенсорного вала 11А входит в область зоны контакта 12.
Таким образом, для массива 24 датчиков на первом сенсорном вале 10, есть 14 расположенных по оси датчиков 26, каждый из которых может быть уникально обозначен с использованием первого указательного значения осевого сегмента в диапазоне от 1 до 14, и есть 50 сегментов отслеживания, связанных с сопряженным или вторым сенсорным валом 11А, каждый из которых может быть уникально обозначен с использованием первого указательного значения сегмента отслеживания в диапазоне от 1 до 50, которые вместе создают 7000 (т.е., 50×14=7000) уникальных пермутаций пар, состоящих из номера датчика и номера окружного сегмента (или временного сегмента), при этом каждая пермутация идентифицируется первой двухэлементной группой, включающей соответственное первое указательное значение осевого сегмента и соответственное первое указательное значение сегмента отслеживания. Таким образом, необработанное показание давления с датчика 26 может быть связано с первым указательным значением осевого сегмента и первым указательным значением сегмента отслеживания, которые вместе уникально идентифицируют 1 из 7000 ячеек в каждой из матриц, показанных на Фиг. 6, 7, 8А и 8В, которые связаны с массивом 24 датчиков. На основании конкретной пермутаций первого указательного значения осевого сегмента и первого указательного значения сегмента отслеживания данные могут быть добавлены или извлечены из соответствующей ячейки одной из этих матриц, связанных с массивом 24 датчиков.
В дополнение к этим 7000 пермутаций, для массива 25 датчиков также есть 14 расположенных по оси датчиков 27, каждый из которых может быть уникально обозначен с использованием второго указательного значения осевого сегмента в диапазоне от 1 до 14, и есть 50 сегментов отслеживания, связанных с сенсорным валом 10, каждый из которых может быть уникально обозначен с использованием второго второе указательное значение сегмента отслеживания в диапазоне от 1 до 50, которые создают 7000 (т.е., 50×14=7000) уникальных пермутаций пар, состоящих из номера датчика и номера окружного сегмента (или номера временного сегмента), при этом каждая пермутация идентифицируется второй двухэлементной группой, включающей соответственное второе указательное значение осевого сегмента и соответственное второе указательное значение сегмента отслеживания. Таким образом необработанное показание давления с датчика 27 может быть связано с вторым указательным значением осевого сегмента и вторым указательным значением сегмента отслеживания, которые вместе уникально идентифицируют 1 из 7000 ячеек в каждой из матриц, показанных на Фиг. 6, 7, 8А и 8В, которые связаны с массивом 25 датчиков. На основании конкретной пермутаций второго указательного значения осевого сегмента и второго указательного значения сегмента отслеживания данные могут быть добавлены или извлечены из соответствующей ячейки одной из этих матриц, связанных с массивом 25 датчиков.
Способ на Фиг. 9 по существу такой же, даже когда есть несколько массивов или множеств датчиков и несколько наборов матриц, например, когда есть два сенсорных вала 10, 11А или есть два массива или множества (24А, 28) датчиков на одном сенсорном вале 102. Подобно этапу 914, также будет получено необработанное показание давления с датчика, входящего в зону контакта 12. Однако соответствующие матрицы подсчета и суммирования, которые будут обновлены, также учитывают, в которое множество (например, 24А, 28) или массив (например, 24, 25) входит этот датчик. Подобно этому, при коррекции необработанного показания давления среднее значение давления выбирают из соответствующей матрицы среднего давления, которая соответствует этому множеству 24А, 28 или массиву 24 25 датчиков, смотрите этап 917. Как и данные, сохраненные для профиля среднего давления в реальном времени, скорректированные показания давления могут быть усреднены в соответствующее осевое значение сегмента такого профиля, независимо от множества 24А, 28 или массива 24, 25 датчиков, используемого для получения такого показания. Также в одном варианте осуществления с несколькими множествами или массивами датчиков этапы 934 и 936 выполняют для каждого множества или массива датчиков; другими словами, соответствующую матрицу среднего давления строят и сохраняют для каждого множества (например, 24А, 28) или массива (например, 24, 25) датчиков.
На Фиг. 13 приведена технологическая схема одного примера модификации, чтобы показать, что сеанс сбора данных с Фиг. 9 может измениться, когда несколько множеств или массивов датчиков используют для сбора данных по давлению в зоне контакта в соответствии с принципами настоящего изобретения. Как сказано в связи с Фиг. 9, новый сеанс сбора начинается на этапе 912 с обнуления старого профиля среднего давления в реальном времени.
На этапе 914А необработанное показание давления получают, когда датчик из любого множества (24А, 28) или массива (например, 24, 25) входит в область зоны контакта 12. Соответственно, определяют, к какому множеству или массиву относится этот датчик, временной (или окружной) сегмент (т.е., сегмент отслеживания), связанный с этим необработанным показанием давления, и осевое положение, связанное с этим необработанным показанием давления. К какому множеству или массиву датчиков относится данный датчик, можно указать как "принадлежность" этого датчика или, другими словами, к какому массиву или множеству принадлежит этот датчик.
Когда сенсорный вал 102 включает два (или больше) множеств или массивов датчиков, номер временного (или окружного) сегмента сопряженного вала 11 определяют на основании времени, которое прошло с момента последнего запускающего сигнала с сопряженного вала 11 (как сказано выше). Однако, когда сопряженный вал 11А сам является сенсорным валом, номер временного (или окружного) сегмента, связанного с любыми необработанными показаниями давления, полученными с датчиков 27 сопряженного или второго сенсорного вала 11А, определяют на основании времени, которое прошло с последнего запускающего сигнала с первого сенсорного вала 10. Таким образом, когда есть два сенсорных вала 10, 11А, их соответствующие функции колеблются между "сенсорным" валом и "сопряженным" валом. Когда необработанное показание давления получено с датчика 27 второго сенсорного вала 11А, этот вал 11А функционирует как сенсорный вал, и первый сенсорный вал 10 фактически считается "сопряженным" валом, данные по поверхности которого вводят в таблицу. Подобно этому, когда необработанное показание давления получено с датчика 26 первого сенсорного вала 10, то вал 11 функционирует как сенсорный вал, и другой сенсорный вал 11А фактически считается "сопряженным" валом, данные по поверхности которого вводят в таблицу. Поэтому, даже если вал четко назван сенсорным валом в вышеприведенном описании, таким как валы 10 и 11А, то конкретный вал может иногда функционировать как "сенсорный" вал, а в другом случае функционировать как "сопряженный" вал.
На этапе 916А для каждого необработанного показания давления, генерированного датчиком 126А, 30 26, 27, определяется матрица подсчета и матрица суммирования, связанные с множеством (24А, 28) или массивом (24, 25), к которому этот датчик принадлежит, и определяется подходящая ячейка в каждой из этих матриц на основании номера временного (или окружного) сегмента и осевого положения, связанное с датчиком, который генерировал это необработанное показание давления. Затем эти ячейки в соответствующих матрице подсчета и матрице суммирования могут быть обновлены.
На этапе 917А определяется сохраненная матрица среднего давления, соответствующая множеству датчиков или массиву датчиков (т.е., по принадлежности датчика), которые получили необработанное показание давления, и на этапе 914А выбирается подходящая ячейка на основании номера временного (или окружного) сегмента и осевого положения, определенного на этапе 914А. Как сказано выше, матрица средних значений давления может включать строку со средними значениями столбцов, которые могут быть использованы для коррекции значений в каждой ячейке матрицы среднего давления, когда она будет выбрана на этом этапе.
На этапе 918А это скорректированное значение среднего давления может быть вычтено из необработанного показания давления, чтобы вычислить скорректированное значение показания давления. На основании осевого положения необработанного показания давления скорректированное значение показания давления может быть сохранено на этапе 920А с другими скорректированными значениями показаний давления для этого осевого положения, полученными во время текущего сеанса сбора, чтобы вычислить профиль среднего давления в реальном времени в подходящее время. Следовательно, когда используют несколько множеств или массивов датчиков, скорректированные значения показаний давления от этих нескольких множеств или массивов датчиков для каждого осевого положения суммируются друг с другом, чтобы определить среднее значение давления для каждого осевого положения при определении профиля среднего давления в реальном времени.
Для варианта осуществления, включающего первое и второе множества 24А и 28 датчиков 126А и 30 на сенсорном вале 102, каждый раз, когда необработанное показание давления с одного из пары датчиков 126А и 30, расположенных на том же осевом сегменте сенсорного вала 30 и разнесенных по окружности, корректируется с использованием значения из ячейки коррекционной матрицы среднего давления, это скорректированное значение показания давления суммируется со всеми другими скорректированными значениями показаний давления для этого конкретного осевого сегмента, полученными ранее с этой пары датчиков (126А, 30) и во время текущего сеанса сбора и подсчета совокупного числа скорректированных значений показаний давления с этой пары датчиков, используемых при построении этой суммы также сохраняется. Из этих сохраненных данных в конце сеанса сбора может быть вычислено среднее значение давления для каждого осевого сегмента профиля среднего давления в реальном времени для области зоны контакта сенсорного вала 102 и сопряженного вала 11 путем деления суммы скорректированных значений необработанных показаний давления путем подсчета совокупного числа скорректированных значений показаний давления.
Для варианта осуществления, включающего первый массив 24 датчиков 26 на первом сенсорном вале 10 и второй массив 25 датчиков 27 на сопряженном или втором сенсорном вале 11А, каждый раз при коррекции необработанного показания давления с одного из датчиков 26 на первом сенсорном вале 10 с использованием значения из ячейки из коррекционной матрицы среднего давления это скорректированное значение необработанного показания давления суммируют со всеми другими скорректированными значениями необработанных показаний давления для этого конкретного осевого сегмента на первом сенсорном вале 10, полученных ранее с этого датчика 26, а также со всеми другими скорректированными значениями необработанных показаний давления для соответствующего или того же осевого сегмента на сопряженном вале 11А, полученными ранее датчиком 27 на сопряженном вале 11А на соответствующем осевом сегменте на сопряженном вале 11А во время текущего сеанса сбора и подсчет совокупного числа скорректированных значений необработанных показаний давления с этого датчика 26 и соответствующего ему датчика 27 на том же осевом сегменте на сопряженном вале 11А, использованного для получения суммы, которую также сохраняют. Подобно этому, при каждой коррекции необработанного показания давления с одного из датчиков 27 на втором сенсорном вале 11А с использованием значения из ячейки коррекционной матрицы среднего давления это скорректированное значение необработанного показания давления суммируют со всеми другими скорректированными значениями необработанных показаний давления для этого конкретного осевого сегмента на втором сенсорном вале 11А, полученных ранее с этого датчика 27, а также со всеми другими скорректированными значениями необработанных показаний давления для соответствующего или того же осевого сегмента на первом сенсорном вале 10, полученных ранее датчиком 26 на первом сенсорном вале 10 на соответствующем осевом сегменте сенсорного вала 10 во время текущего сеанса сбора. Из этих сохраненных данных в конце сеанса сбора может быть получено среднее значение давления для каждого осевого сегмента профиля среднего давления в реальном времени для области зоны контакта первого и второго сенсорных валов 10 и 11А путем деления суммы скорректированных значений необработанных показаний давления на совокупное число скорректированных значений показаний давления. В качестве альтернативы, отдельный профиль давления может быть вычислен для каждого из массивов 24, 25 датчиков. Вычисление отдельных профилей давления в реальном времени может позволить калибровать датчики, которые входят в массивы 24, 25. Калибровка датчика может быть проверена и выполнена путем сравнения для каждого осевого сегмента профиля давления давлений с двух датчиков, по одному из каждого массива 24, 25, которые находятся в зоне контакта одновременно. Значения датчиков могут быть отрегулированы или откалиброваны, чтобы каждый датчик давал одинаковое показание, после калибровки массивов 24, 25 датчиков отдельные профили давления в реальном времени могут быть объединены в один профиль давления в реальном времени.
Затем выполнение способа можно продолжить этапом 922 (смотрите Фиг. 9), чтобы определить, завершен ли сеанс сбора или нет. Когда все сеансы сбора из множества сеансов сбора завершены, может быть построена новая матрица среднего давления с использованием матриц подсчета и сумм. В одном варианте осуществления с несколькими множествами или массивами датчиков соответствующую новую матрицу среднего давления строят для каждого из множеств или массивов датчиков, и ее можно использовать при последующих сеансах сбора (например, на следующий день). То есть, отдельную новую матрицу среднего давления строят для каждого множества или массива датчиков.
Приведенное выше описание технологической схемы с Фиг. 13 предполагает, что сенсорный вал 10 и сенсорный вал 11А логически разделены на одинаковое число осевых сегментов (например, 14), определяемых по числу датчиков на противоположном сенсорном вале. Также в приведенном выше описании предполагается, что оба сенсорных вала 10, 11А также сегментированы на одинаковое число (например, 50) сегментов отслеживания. Соответственно, матрицы, связанные с каждым сенсорным валом, имеют одинаковый размер (например, 7000 ячеек). Средний специалист поймет, что каждый сенсорный вал может иметь соответствующее число осевых сегментов и сегментов отслеживания, которые отличаются друг от друга. Этапы технологических схем с Фиг. 9 и Фиг. 13 будут оставаться по существу неизменными, но соответствующие матрицы, связанные с каждым сенсорным валом будут иметь разный размер.
В том случае, если два вала имеют одинаковое число осевых сегментов (например, 14), но разное число сегментов отслеживания, сенсорный вал, который имеет больше сегментов отслеживания, будет давать для каждого осевого сегмента больше выборок данных для профиля давления в реальном времени, вычисляемого на этапе 924, но этапы технологической схемы останутся такими же.
В том случае, если два сенсорных вала имеют разное число осевых сегментов, то сбор данных и построение разных матриц для каждого сенсорного вала останутся такими же, но способ вычисления профиля давления в реальном времени с использованием таких данных может быть модифицирован. Например, если все датчики на обоих валах расположены с равным интервалом, и сенсорный вал 10 имеет вдвое больше датчиков чем сенсорный вал 11А, то один осевой сегмент зоны контакта будет связан с показаниями двух датчиков вала 10 и только одним показанием датчика вала 11А. Можно использовать разные способы объединения этих трех значений, чтобы получить полезный профиль давления в реальном времени для этого осевого сегмента зоны контакта. Как общий принцип, каждый отдельный осевой сегмент зоны контакта будет связан с одним или несколькими датчиками на одном сенсорном вале и одним или несколькими датчиками на другом сенсорном вале. Создание профиля среднего давления для зоны контакта в реальном времени выполняют путем определения, какие датчики связаны с каким осевым сегментом зоны контакта, и объединения значений с этих датчиков статистически подходящим способом.
Как сказано выше, существуют способы синхронизации измерений датчиков другие чем использование генератора сигналов 900 (или 900А), чтобы генерировать соответствующие запускающие сигналы 900. Говоря в общем, запускающий сигнал связан с сопряженным валом 11 в известном контрольном положении, так что время, которое прошло с самого последнего запускающего сигнала, позволяет процессору 903 идентифицировать текущее угловое положение сопряженного вала относительно этого контрольного положения. Также можно использовать альтернативные способы, позволяющие процессору 903 вычислять угловое положение сопряженного вала 11 относительно контрольного положения. Например, генератор импульсов может генерировать 1000 импульсов за каждый оборот сопряженного вала 11, и счетчик может подсчитывать импульсы, так что когда отсчет достигнет 1000, счетчик сбросится на начало отсчета с 1. Учитывая то, что положение сопряженного вала 11 соответствует "контрольному положению" в начале отсчета, текущее значение отсчета импульсов, когда поступает сигнал для датчика, может быть переведено на этап 903 и использовано для определения углового положения сопряженного вала 11 относительно контрольного положения.
При использовании больше одного сенсорного вала существуют другие альтернативы генератору сигналов 900 и 900А, подающему запускающий сигнал 901, 901А процессору 903, чтобы определить временные сегменты или окружные сегменты. В частности, синхронизация данных датчика по каждому сенсорному валу 10, 11А также может быть использована для этой цели. Например, получение необработанных показаний давления с датчиков 27 сенсорного вала 11А может быть синхронизировано с вращением сенсорного вала 10. Один из четырнадцати датчиков 26 сенсорного вала 10 может быть выбран для указания полного оборота сенсорного вала 10, чтобы каждый раз, когда один датчик 26 входит в область зоны контакта 12 сенсорный вал 10 считался совершившим оборот и периодически создавалось ссылка на контрольное положение. Вместо того, чтобы измерять время с момента подачи запускающего сигнала, можно использовать время с последней ссылки на контрольное положение. Каждый раз, когда один датчик 26 входит в область зоны контакта 12, измерение периода времени может быть перезапущено, так что текущий период времени указывает, какие из сегментов отслеживания, связанных с сенсорным валом 10, в настоящее время находятся в области зоны контакта 12. Таким образом, когда датчик 27 сенсорного вала 11А входит в область зоны контакта 12 и получает необработанное показание давления, прошедший период времени с момента, когда один датчик 26 сенсорного вала 10 последний раз вошел в зону контакта 12, можно использовать для идентификации соответствующего временного сегмента или окружного сегмента сенсорного вала 10, чтобы связать с этим необработанное показание давления. В соответствии этой альтернативой результаты измерения давления, сообщаемые беспроводными передатчиками 40, 40А процессору 903, также могут включать информацию по синхронизации, чтобы позволить процессору 903 выполнить соответствующие вычисления, основанные на времени.
Подобный подход также можно использовать для измерения необработанных показаний давления, полученных с датчиков 26 синхронно по отношению к вращению сенсорного вала 11А. В этом подходе один из четырнадцати датчиков 27 сенсорного вала 11А может быть выбран для указания полного оборота сенсорного вала 11А, так что когда один датчик 27 входит в область зоны контакта 12, сенсорный вал 11А считается совершившим один оборот, и периодически происходит ссылка на второй раз. Вместо измерения времени с подачи запускающего сигнала время с самой последней ссылки на второй раз можно использовать для синхронизации измерений датчиков 26 в отношении периода оборота сенсорного вала 11А.
Также, три или больше массивов датчиков можно расположить на одном сенсорном вале или два или больше массивов датчиков можно расположить на паре сенсорных валов, которые формируют зону контакта. Так средний специалист поймет, что получение данных с двух массивов датчиков, которые описаны в настоящем документе, представлено просто для примера, и что данные с большего числа чем два массива датчиков также могут быть получены без нарушения объема настоящего изобретения. Каждый массив датчиков будет иметь связанные с ним матрицы, которые как показаны на Фиг. 6-8А; однако этапы технологических схем с Фиг. 9 и Фиг. 13 останутся по существу такими же для каждого массива датчиков независимо от их числа и конфигурации нескольких массивов датчиков.
Разные примеры расположения валов, описанные выше, включают расположение двух валов; однако можно расположить три или больше валов таким образом, чтобы перемещать полотна материала. Например, один сенсорный вал можно расположить между двумя сопряженными валами, чтобы сенсорный вал формировал две отдельные зоны контакта, по одной с каждым сопряженным валом. При таком расположении датчик сенсорного вала будет вращаться через две зоны контакта во время каждого оборота сенсорного вала, и соответствующие показания давления могут быть получены из каждой зоны контакта. Таким образом можно вычислить матрицы с Фиг. 6-8В и профиль среднего давления в реальном времени для каждой зоны контакта в соответствии с принципами, описанными выше. Даже если фактически присутствует только один сенсорный вал, сбор и анализ данных функционально эквивалентен двум сенсорным валам и двум сопряженным валам, формирующим отдельные зоны контакта, так что способ, отраженный на технологической схеме с Фиг. 9, будет реализован отдельно для каждого сопряженного вала.
Подобно этому, три сенсорных вала могут быть расположены так, что центральный сенсорный вал сформирует отдельные зоны контакта с двумя наружными сенсорными валами. Матрицы с Фиг. 6-8В и профиль среднего давления в реальном времени могут быть вычислены для каждой зоны контакта в соответствии с принципами, описанными выше. Даже если фактически присутствуют только три сенсорных вала, сбор и анализ данных будет функционально эквивалентен двум разным парам сенсорных валов, формирующих отдельные зоны контакта, так что способ, отраженный на технологических схемах с Фиг. 9 и Фиг. 13, будет реализован по отдельности для каждой гипотетической пары сенсорных валов.
Средний специалист легко поймет, что существуют много разных способов расположить некоторое число датчиков или массивов датчиков на сенсорном вале. Один пример такого расположения представлен в патенте США №8,475,347, где массивы датчиков "чередуются". Другими словами, каждый датчик первого массива датчиков связан с соответствующим осевым сегментом сенсорного вала, а каждый датчик второго массива датчиков связан с соответствующим осевым сегментом сенсорного вала. В частности, однако, соответствующие осевые места, связанные с датчиком из первого массива датчиков, располагаются между парой соответствующих осевых сегментов, связанных с парой датчиков второго массива, чтобы создать "чередование" датчиков из двух разных массивов. В соответствии с принципами настоящего изобретения, примеры способа, описанные в отношении Фиг. 9 и Фиг. 13, можно использовать с таким расположением чередующихся датчиков. Если, например, первый массив датчиков имеет x датчиков, и чередующийся второй массив датчиков имеет y датчиков, то разные профили давления в зоне контакта в реальном времени могут быть построены в соответствии с принципами настоящего изобретения. Два отдельных профиля зоны контакта, например, могут быть созданы при одном профиле зоны контакта с x осевыми сегментами, соответствующими показаниям датчиков из первого массива, и второй профиль зоны контакта с y осевых сегментов, соответствующих y датчикам второго массива. Затем можно построить составной профиль зоны контакта с (x+y) осевыми сегментами путем объединения двух отдельных профилей зоны контакта для графического представления оператору.
Альтернативно, два массива датчиков могут быть обработаны в соответствии с принципами настоящего изобретения как один массив с (x+y) датчиками и, поэтому, (x+y) соответствующими осевыми сегментами. Соответственно, тогда может быть построен один профиль зоны контакта для графического представления оператору, который имеет (x+y) осевых сегментов.
Хотя были описаны и показаны конкретные варианты осуществления настоящего изобретения, специалистам в данной области техники будет очевидно, что могут быть внесены разные другие изменения и модификации без нарушения сущности и объема изобретения. Поэтому предполагается, что прилагаемая формула изобретения включает все такие изменения и модификации, которые входят в объем настоящего изобретения.
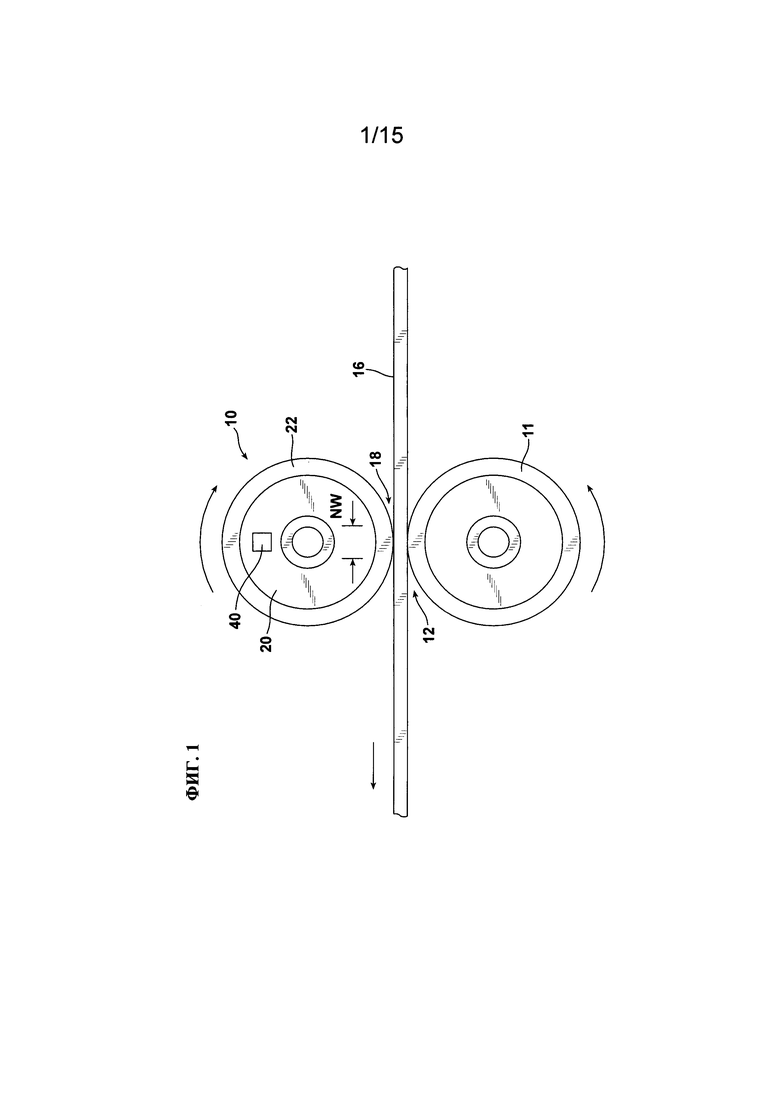
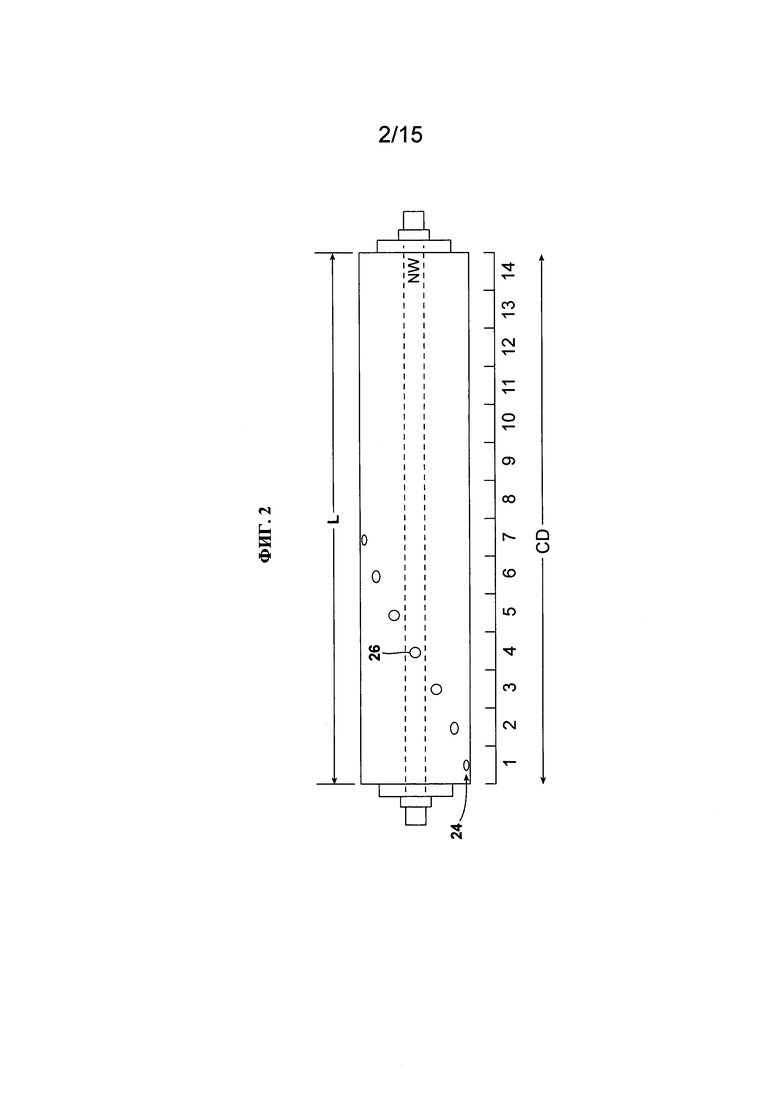
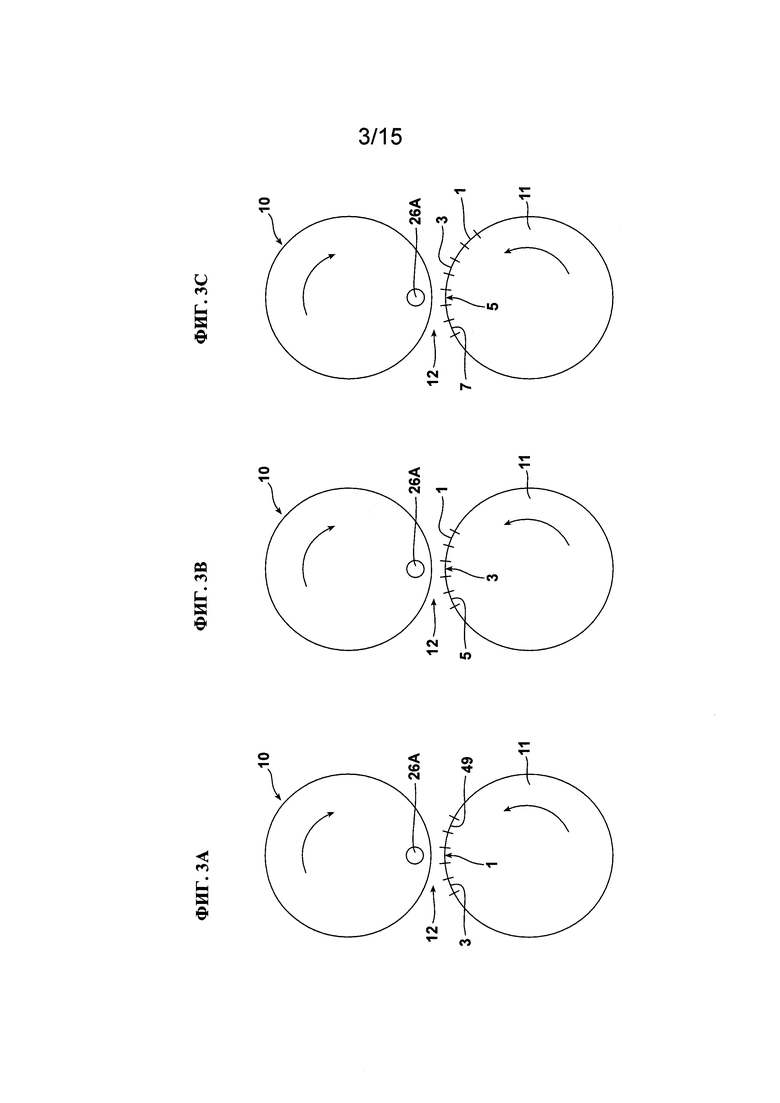
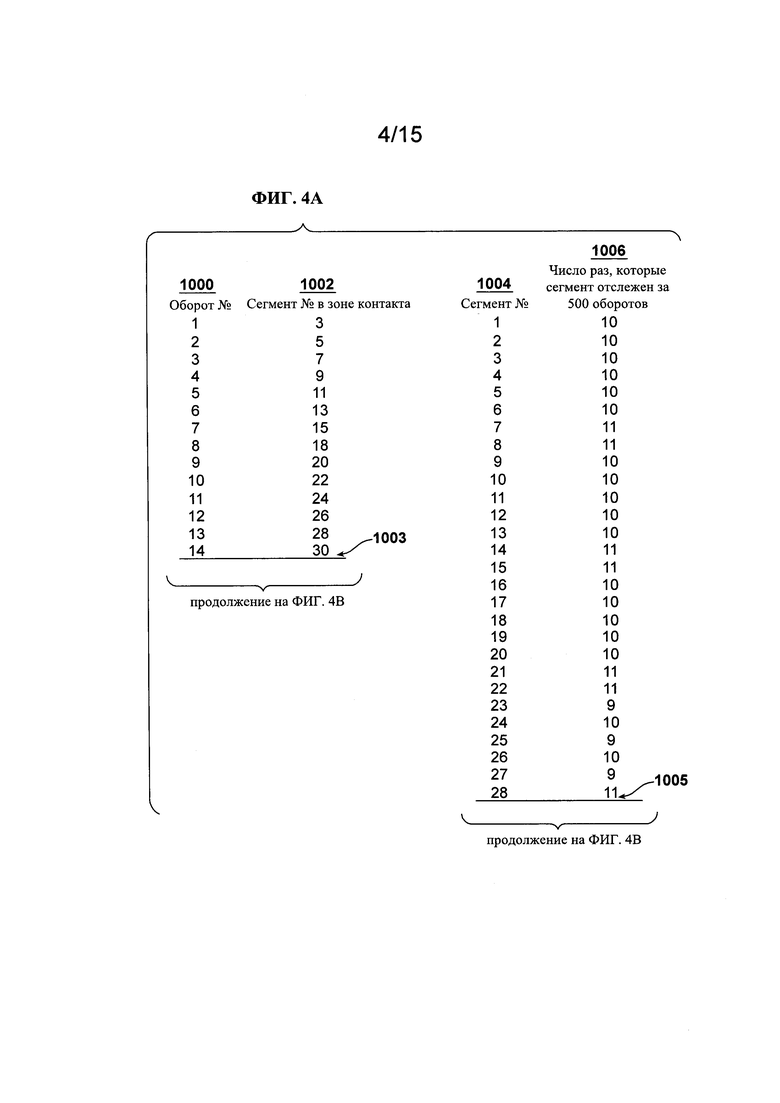
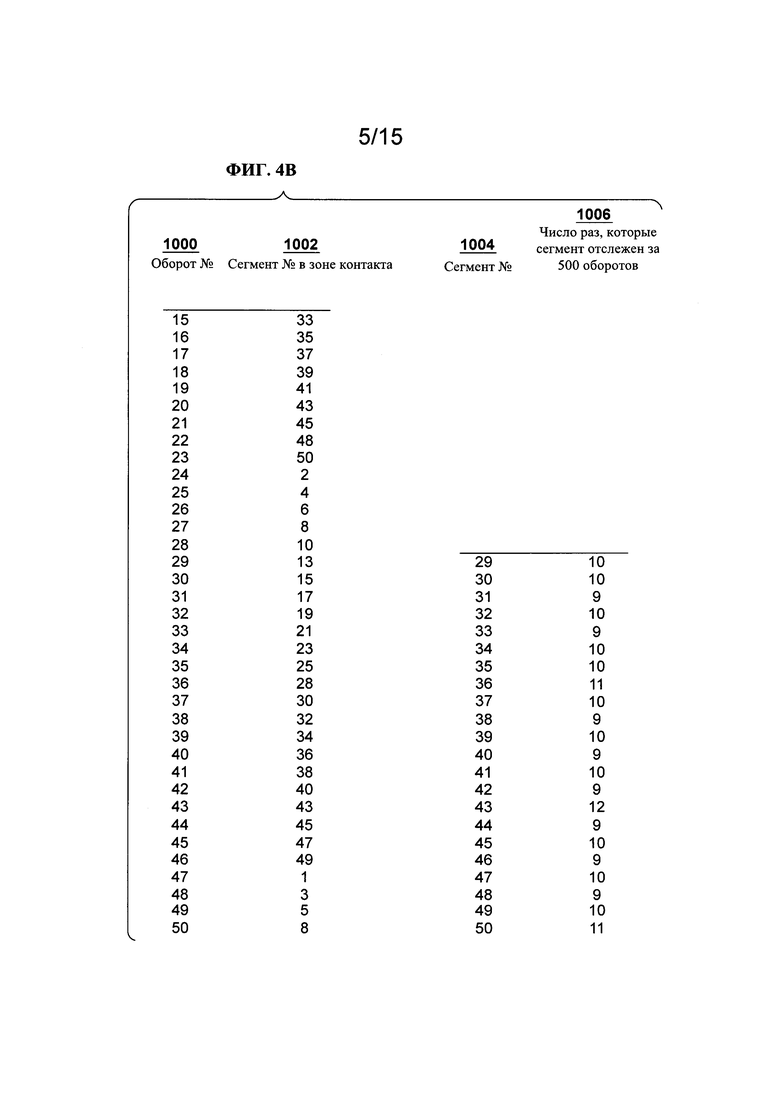
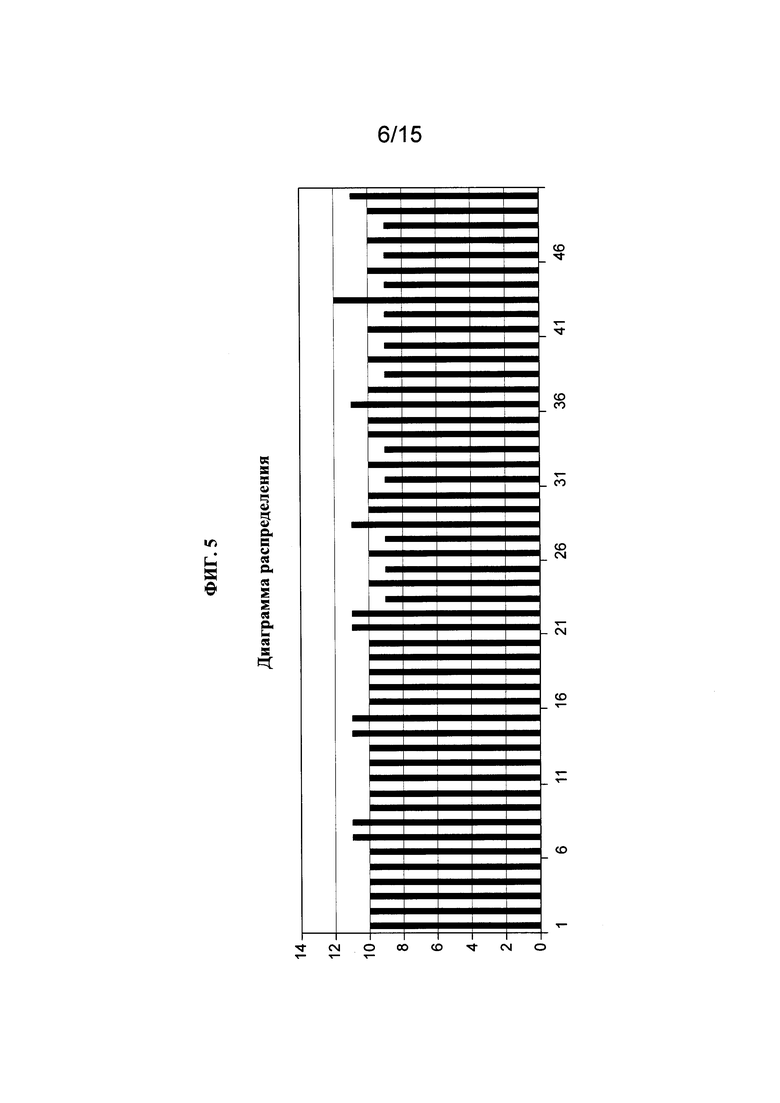
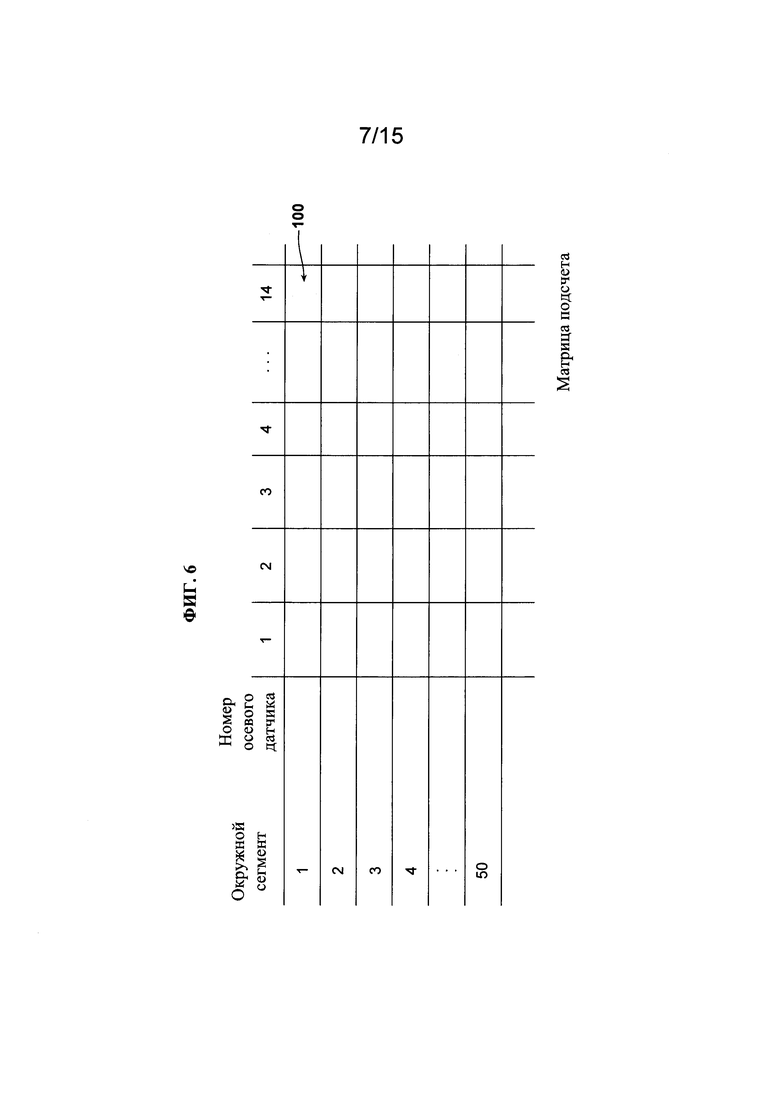
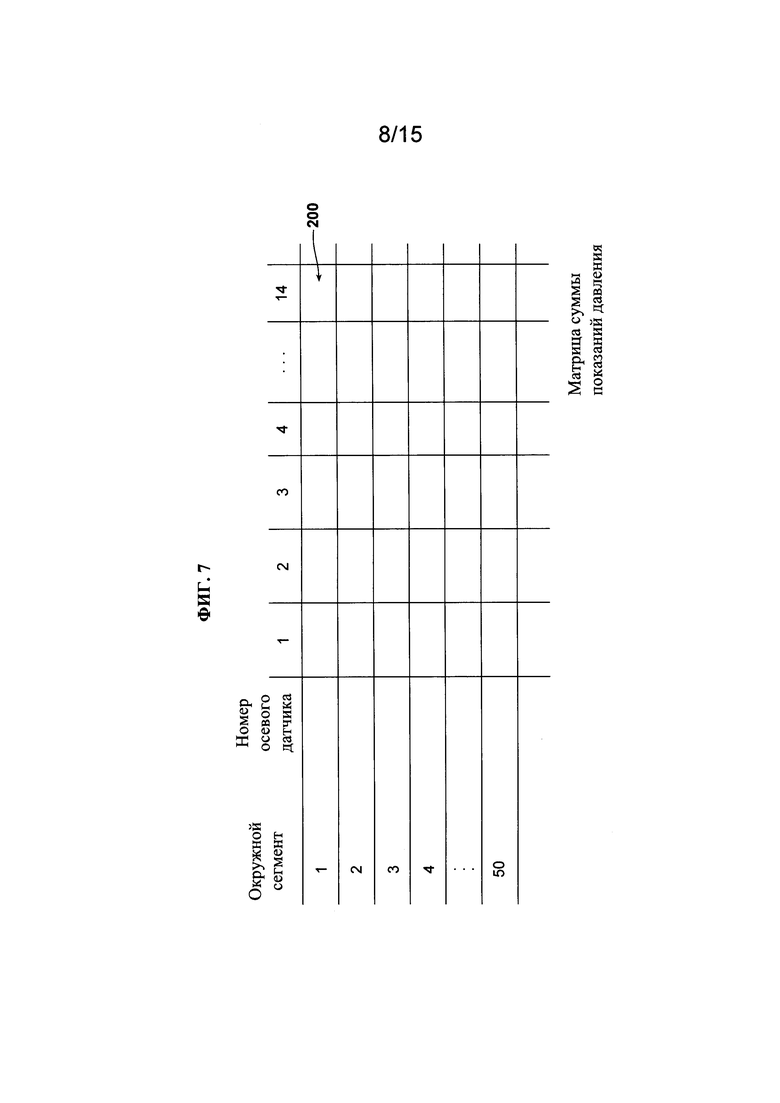
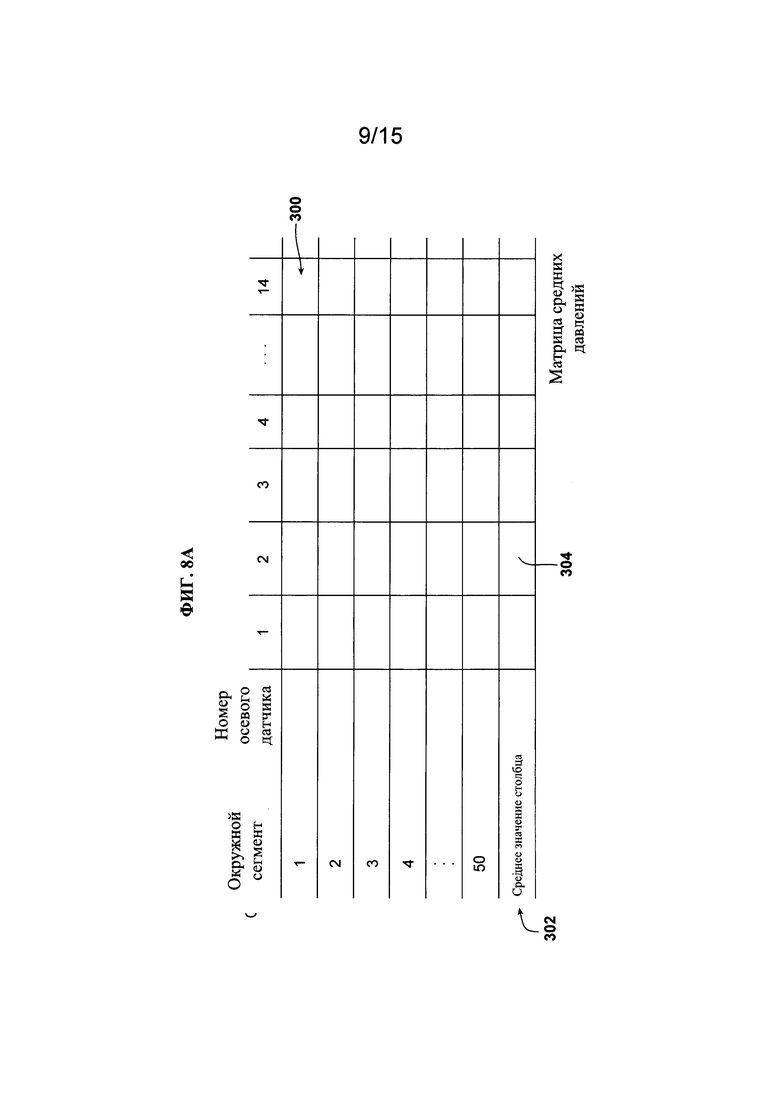

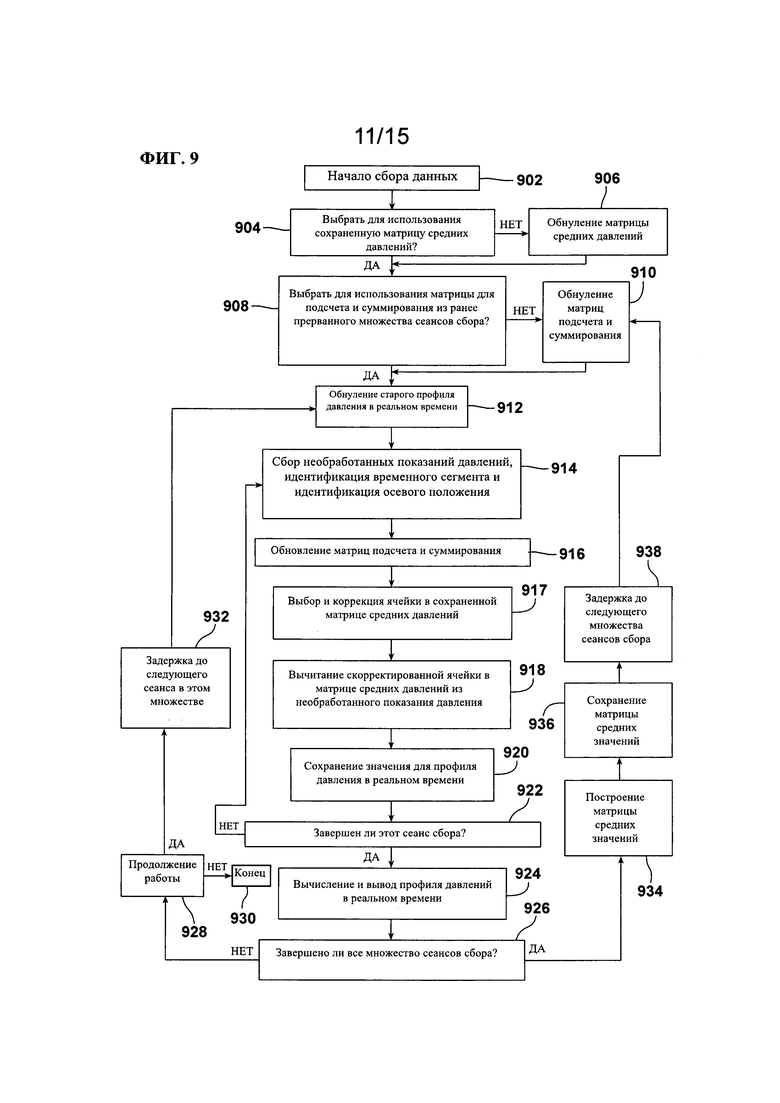
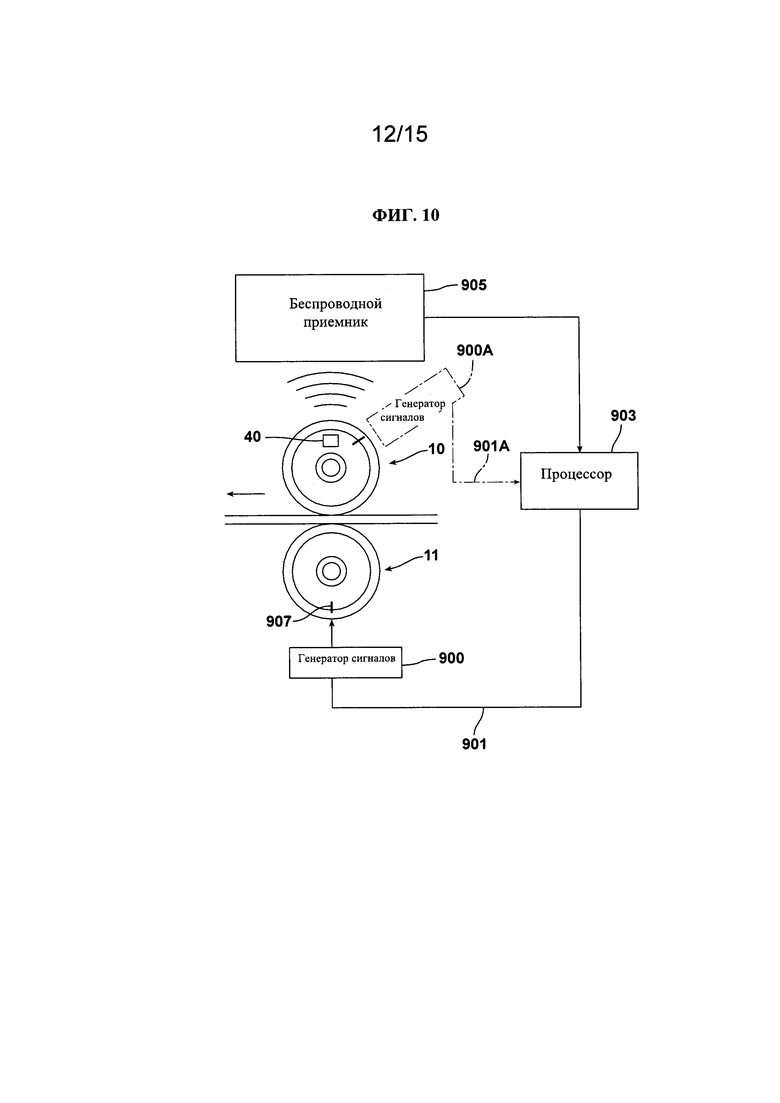

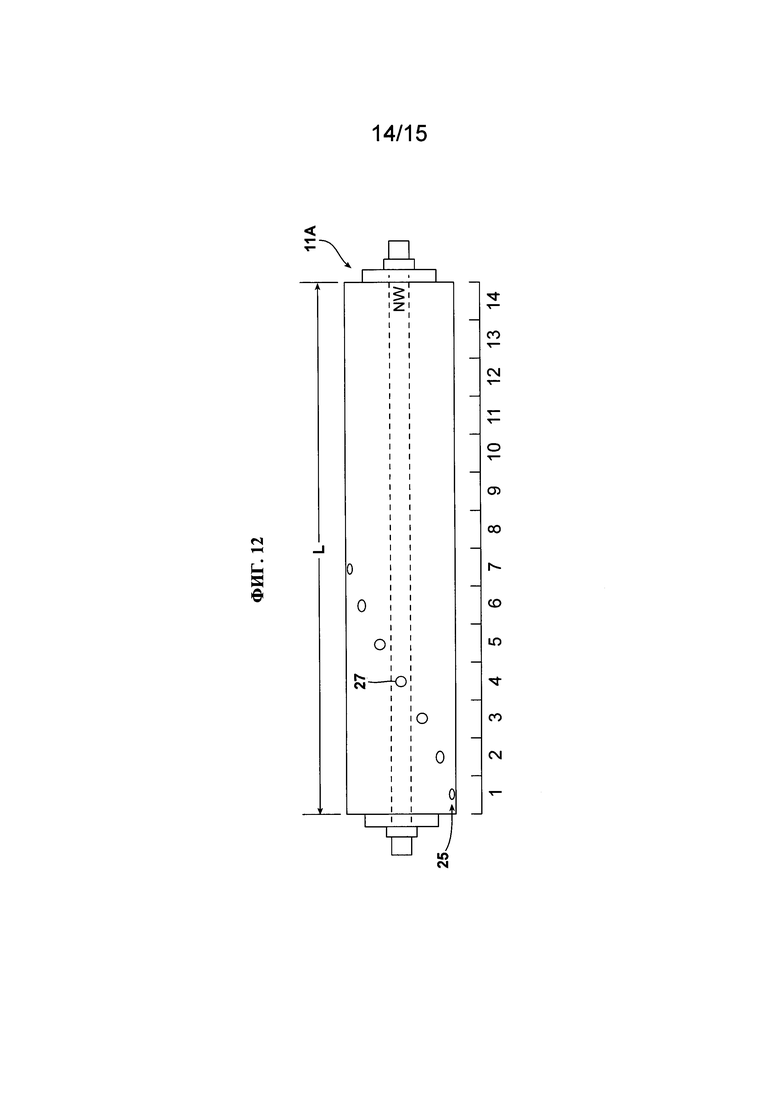
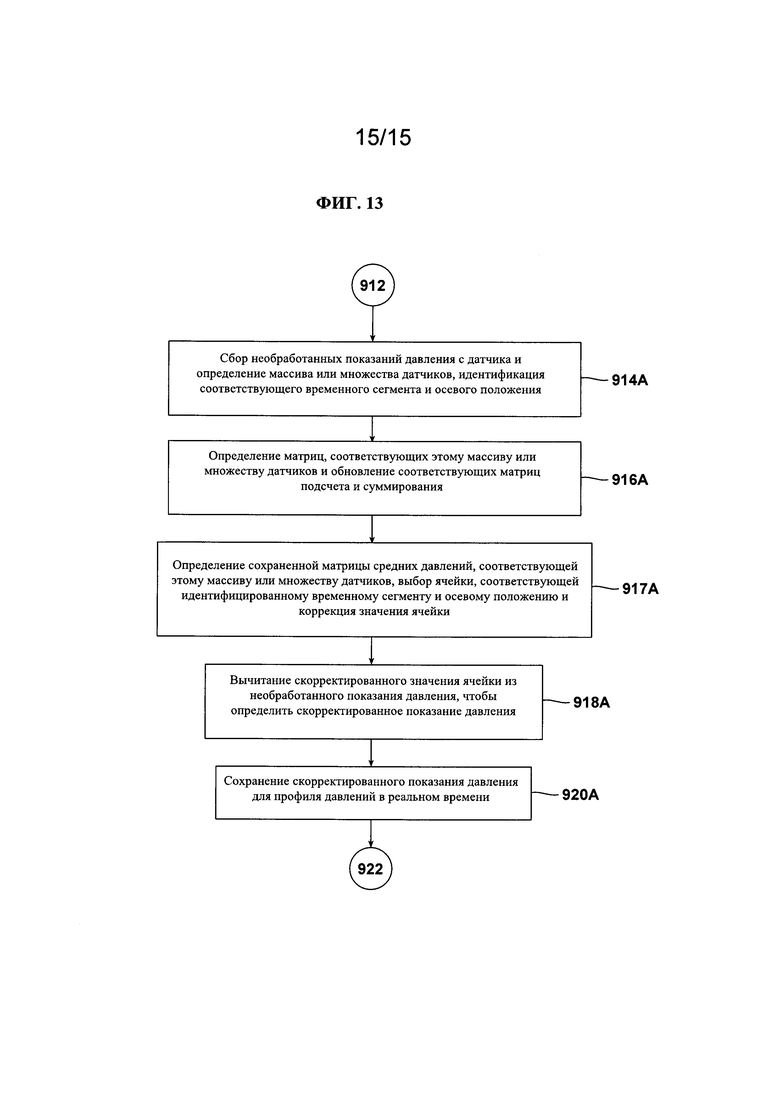
Изобретение относится в общем к валковым прессам, используемым для приложения сжимающих сил к движущимся полотнам для формования, например, бумаги, текстильного материала, пластиковой фольги и т.д. Для сбора данных по сенсорному и сопряженному валам, которые формируют зону контакта, используют первое и второе множества датчиков. Каждый датчик первого множества имеет соответствующий датчик во втором множестве, который связан с тем же осевым расположением на сенсорном валу, но отстоит от него по окружности. Датчики расположены в распределенных в осевом направлении местах сенсорного вала и генерируют первый или второй соответствующий сигнал при входе в зону контакта. После приема генерированного сигнала выполняется определение, какой датчик генерировал принятый сигнал, и принадлежность этого датчика к одному из множеств. На основании углового положения сопряженного вала выполняется определение, какой сегмент отслеживания, связанный с сопряженным валом, входит в область зоны контакта одновременно с сигналом, чтобы сохранить сигнал, используя определенный один сегмент отслеживания и определенную принадлежность. Технический результат заключается в устранении влияния вращательной вариабельности сопряженного вала по профилю давления в зоне контакта. 2 н. и 27 з.п. ф-лы, 13 ил. 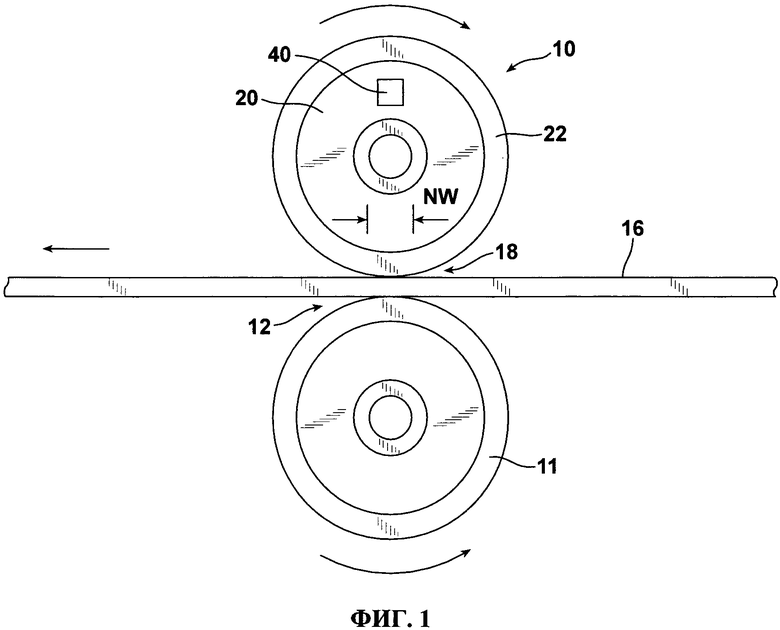
1. Система, связанная с сенсорным валом и сопряженным валом, для сбора данных по валам, включающая:
первое множество датчиков, расположенных в распределенных в осевом направлении местах сенсорного вала, причем каждый датчик первого множества входит в участок зоны контакта между сенсорным валом и сопряженным валом при каждом обороте сенсорного вала, чтобы генерировать первый сигнал соответствующего датчика;
второе множество датчиков, расположенных в распределенных в осевом направлении местах сенсорного вала, причем каждый датчик второго множества входит в область зоны контакта при каждом обороте сенсорного вала, чтобы генерировать второй сигнал соответствующего датчика,
причем каждый датчик первого множества имеет соответствующий датчик во втором множестве, который связан с тем же осевым расположением на сенсорном валу, но отстоит от него по окружности;
и
процессор для приема сигнала, полученного с датчика, причем сигнал, принятый с датчика, включает один из первого сигнала датчика и второго соответствующего сигнала датчика, и после приема сигнала, принятого с датчика, процессор:
определяет один конкретный из датчиков первого множества или второго множества, который генерировал сигнал, принятый с датчика,
определяет принадлежность этого конкретного датчика на основании того, к какому множеству датчиков принадлежит этот конкретный датчик,
на основании углового положения сопряженного вала относительно контрольного положения определяет, какой один из множества сегментов отслеживания, связанных с сопряженным валом, входит в область зоны контакта, по существу, одновременно с конкретным датчиком, входящим в область зоны контакта, и
сохраняет сигнал, принятый с датчика, используя определенный сегмент отслеживания и определенную принадлежность.
2. Система по п. 1, отличающаяся тем, что каждый из упомянутого числа сегментов отслеживания имеет, по существу, равный другому размер.
3. Система по п. 1, отличающаяся тем, что сигнал, принятый с датчика, включает значение давления.
4. Система по п. 1, отличающаяся тем, что процессор принимает:
первый сигнал датчика от каждого из датчиков первого множества при каждом обороте сенсорного вала,
второй соответствующий сигнал датчика от каждого из датчиков второго множества при каждом обороте сенсорного вала и
множество сигналов датчиков, включающее множество первых сигналов датчиков и множество вторых соответствующих сигналов датчиков во время некоторого множества оборотов сенсорного вала.
5. Система по п. 4, отличающаяся тем, что для каждого из множества сигналов датчиков процессор идентифицирует:
его определенный один сегмент отслеживания,
соответствующий осевой сегмент сопряженного вала и
конкретный датчик из первого или второго множеста датчиков, который генерировал этот конкретный один из множества сигналов датчиков, причем процессор также определяет принадлежность этого конкретного датчика на основании того, к какому множеству датчиков принадлежит этот конкретный датчик.
6. Система по п. 5, отличающаяся тем, что:
сопряженный вал включает n осевых сегментов, имеющих соответствующие указательные значения: 1, 2, …, n;
сопряженный вал связан с m сегментами отслеживания, имеющими соответствующие указательные значения: 1, 2, …, m, и
причем для каждого из первого множества датчиков и второго множества датчиков существуют (n умножить на m) уникальных пермутаций, которые идентифицируются двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания.
7. Система по п. 6, отличающаяся тем, что:
для множества первых соответствующих сигналов датчиков и для каждой из первого множества возможных (n умножить на m) пермутаций процессор определяет среднее значение всех из множества первых соответствующих сигналов датчиков, связанных с осевым сегментом и сегментом отслеживания, совпадающими каждой из множества пермутаций; и
для множества вторых соответствующих сигналов датчиков и для каждой из второго множества возможных (n умножить на m) пермутаций процессор определяет среднее значение всех множеств вторых соответствующих сигналов датчиков, связанных с осевым сегментом и сегментом отслеживания, совпадающими с каждым из второго множества пермутаций.
8. Система по п. 6, отличающаяся тем, что
для множества первых соответствующих сигналов датчиков и каждой из первого множества возможных (n умножить на m) пермутаций процессор определяет:
число раз, которые один или больше из множества первых соответствующих сигналов датчиков связаны с осевым сегментом и сегментом отслеживания, совпадающими с этой пермутацией; и
сумму всех из множества первых соответствующих сигналов датчиков, связанных с этими осевым сегментом и сегментом отслеживания, совпадающими с этой пермутацией; и
для множества вторых соответствующих сигналов датчиков и каждой из второго множества возможных (n умножить на m) пермутаций процессор определяет:
число раз, которые один или больше из множества вторых соответствующих сигналов датчиков связаны с осевым сегментом и сегментом отслеживания, совпадающими с этой пермутацией; и
сумму всех из множества вторых соответствующих сигналов датчиков, связанных с этими осевым сегментом и сегментом отслеживания, совпадающими с этой пермутацией
9. Система по п. 1, отличающаяся тем, что множество сегментов отслеживания, связанных с сопряженным валом, включает одно из:
множества окружных сегментов на сопряженном валу и
множества временных сегментов периода сопряженного вала.
10. Система по п. 5, отличающаяся тем, что:
сопряженный вал включает n осевых сегментов, имеющих соответствующие указательные значения: 1, 2, …, n;
период сопряженного вала включает m сегментов отслеживания, имеющих соответствующие указательные значения: 1, 2, …, m,
причем для каждого из первого множества датчиков существуют (n умножить на m) уникальных пермутаций соответственно, которые идентифицируются первой двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания, и для каждого из второго множества датчиков существуют (n умножить на m) уникальных пермутаций соответственно, которые идентифицируются второй двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания; и
соответствующее среднее значение давления связано с каждой из (n умножить на m) уникальных пермутаций каждой из первой и второй групп, причем каждое из соответствующих средних значений давления основано на ранее собранных показаниях давления, относящихся к зоне контакта.
11. Система по п. 10, отличающаяся тем, что:
среднее значение первого соответствующего столбца связано с каждым указательным значением осевого сегмента первой группы, причем каждое среднее значение первого соответствующего столбца включает среднее значение m соответствующих средних значений давления из первого множества, связанное с этим указательным значением осевого сегмента первой группы; и
среднее значение второго соответствующего столбца связано с каждым указательным значением осевого сегмента второй группы, причем каждое среднее значение второго соответствующего столбца включает среднее значение m соответствующих средних значений давления из второй группы, связанное с этим указательным значением осевого сегмента второй группы.
12. Система по п. 11, отличающаяся тем, что процессор:
для каждого из множества сигналов, принятых с датчиков, который определяет показание давления:
определяет указательное значение конкретного осевого сегмента и указательное значение конкретного сегмента отслеживания на основании осевого сегмента, связанного с этим сигналом, его определенный один сегмент отслеживания и генерирован ли этот сигнал первым множеством датчиков или вторым множеством датчиков;
выбирает соответствующее среднее значение давления, связанное с указательным значением конкретного осевого сегмента и указательным значением конкретного сегмента отслеживания;
вычисляет соответствующее скорректированное среднее значение давления, вычитая:
одно из среднего значения первого соответствующего столбца или среднего значения второго соответствующего столбца, связанного с указательным значением конкретного осевого сегмента, по выбранному соответствующему среднему значению давления; и
вычисляет соответствующее скорректированное значение показания давления, вычитая соответствующее скорректированное среднее значение давления из принятого сигнала датчика.
13. Система по п. 12, отличающаяся тем, что процессор:
вычисляет профиль средних значений давления на основании соответствующих скорректированных значений показаний давления.
14. Система по п. 1, также включающая:
генератор сигнала, чтобы генерировать запускающий сигнал при каждом обороте сопряженного вала, причем процессор идентифицирует угловое положение сопряженного вала относительно контрольного положения на основании самого последнего генерированного запускающего сигнала.
15. Система по п. 1, включающая:
третье множество датчиков, расположенных в распределенных в осевом направлении местах сенсорного вала, причем каждый датчик третьего множества входит в область зоны контакта между сенсорным валом и сопряженным валом при каждом обороте сенсорного вала, чтобы генерировать третий соответствующий сигнал датчика;
причем каждый датчик третьего множества имеет соответствующий датчик по меньшей мере в одном из первого множества и второго множества, который связан с тем же осевым расположением на сенсорном валу, но отстоит от него по окружности;
и
процессор для приема третьего соответствующего сигнала датчика, и после приема третьего соответствующего сигнала датчика процессор:
определяет один конкретный из датчиков третьего множества, который генерировал третий соответствующий сигнал датчика,
определяет принадлежность этого конкретного датчика на основании этого датчика, входящего в третье множество,
на основании углового положения сопряженного вала относительно контрольного положения определяет, какой один из множества сегментов отслеживания, связанных с сопряженным валом, входит в область зоны контакта, по существу, одновременно с конкретным датчиком третьего множества, входящим в область зоны контакта, и
сохраняет третий соответствующий сигнал датчика, используя один определенный сегмент отслеживания и определенную принадлежность.
16. Способ, связанный с сенсорным валом и сопряженным валом, для сбора данных по валам, включающий:
генерацию первого сигнала датчика каждым датчиком из первого множества датчиков, расположенных в распределенных в осевом направлении местах сенсорного вала, причем каждый первый сигнал датчика генерируется, когда каждый датчик первого множества входит в участок зоны контакта между сенсорным валом и сопряженным валом при каждом обороте сенсорного вала;
генерацию второго сигнала датчика каждым датчиком из второго множества датчиков, расположенных в распределенных в осевом направлении местах сенсорного вала, причем каждый второй сигнал датчика генерируется, когда каждый датчик второго множества входит в область зоны контакта между сенсорным валом и сопряженным валом при каждом обороте сенсорного вала;
причем каждый датчик первого множества имеет соответствующий датчик во втором множестве, который связан с тем же осевым расположением на сенсорном валу, но отстоит от него по окружности;
прием сигнала датчика, причем сигнал, принятый с датчика, включает один из первого сигнала датчика и второго соответствующего сигнала датчика, и после приема сигнала, принятого с датчика:
определение одного конкретного из датчиков первого множества или второго множества, который генерировал сигнал, принятый с датчика,
определение принадлежности этого датчика на основании того, к какому из множеств датчиков принадлежит этот конкретный датчик;
на основании углового положения сопряженного вала относительно контрольного положения - определение, какой из множества сегментов отслеживания, связанных с сопряженным валом, входит в область зоны контакта, по существу, одновременно с конкретным датчиком, входящим в область зоны контакта, и
сохранение сигнала, принятого с датчика, с использованием определенного одного сегмента отслеживания и определенной принадлежности.
17. Способ по п. 16, отличающийся тем, что каждый из числа сегментов отслеживания имеет, по существу, равный с другим размер.
18. Способ по п. 16, отличающийся тем, что сигнал, принятый с датчика, включает значение давления.
19. Способ по п. 16, включающий:
прием первого сигнала датчика от каждого из датчиков первого множества при каждом обороте сенсорного вала;
прием второго соответствующего сигнала датчика от каждого из датчиков второго множества при каждом обороте сенсорного вала и
прием множества сигналов датчиков, включающего множество первых соответствующих сигналов датчиков и множество вторых соответствующих сигналов датчиков во время некоторого множества оборотов сенсорного вала.
20. Способ по п. 19, включающий:
идентификацию для каждого из множества соответствующих сигналов датчиков:
его определенного одного сегмента отслеживания,
связанного осевого сегмента и
конкретного датчика из первого или второго множеств датчиков, который генерировал этот конкретный один из множества сигналов датчиков, причем определение принадлежности этого конкретного датчика основано на том, к какому множеству датчиков принадлежит этот конкретный датчик.
21. Способ по п. 20, отличающийся тем, что:
сопряженный вал включает n осевых сегментов, имеющих соответствующие указательные значения: 1, 2, …, n;
период сопряженного вала включает m сегментов отслеживания, имеющих соответствующие указательные значения: 1, 2, …, m; и
тем, что для каждого из первого множества датчиков и второго множества датчиков существуют (n умножить на m) уникальных пермутаций, которые идентифицируются двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания.
22. Способ по п. 21, включающий:
вычисление для множества первых соответствующих сигналов датчиков и для каждой из первого множества возможных (n умножить на m) пермутаций среднего значения всего множества соответствующих сигналов датчиков со связанным осевым сегментом и определенным сегментом отслеживания, совпадающими с этой пермутацией; и
вычисление для множества вторых соответствующих сигналов датчиков и для каждой из второго множества возможных (n умножить на m) пермутаций среднего значения всего множества соответствующих сигналов датчиков со связанным осевым сегментом и определенным сегментом отслеживания, совпадающими с этой пермутацией.
23. Способ по п. 21, включающий:
для множества первых соответствующих сигналов датчиков и каждой из первого множества возможных (n умножить на m) пермутаций вычисление:
числа раз, которые один или больше из множества первых соответствующих сигналов датчиков имеют связанный осевой сегмент и определенный сегмент отслеживания, совпадающие с этой пермутацией; и
суммы всех из множества первых соответствующих сигналов датчиков, имеющих связанный осевой сегмент и определенный сегмент отслеживания, совпадающие с этой пермутацией, и
для множества вторых соответствующих сигналов датчиков и каждой из второго множества возможных (n умножить на m) пермутаций вычисление:
числа раз, которые один или больше из множества вторых соответствующих сигналов датчиков имеют связанный осевой сегмент и определенный сегмент отслеживания, совпадающие с этой пермутацией; и
суммы всех из множества вторых соответствующих сигналов датчиков, имеющих связанный осевой сегмент и определенный сегмент отслеживания, совпадающие с этой пермутацией.
24. Способ по п. 16, отличающийся тем, что множество сегментов отслеживания, связанных с сопряженным валом, включают одно из:
множества окружных сегментов на сопряженном валу и множества временных сегментов периода сопряженного вала.
25. Способ по п. 20, отличающийся тем, что:
сопряженный вал включает n осевых сегментов, имеющих соответствующие указательные значения: 1, 2, …, n;
период сопряженного вала включает m сегментов отслеживания, имеющих соответствующие указательные значения: 1, 2, …, m,
причем для каждого из первого множества датчиков существуют (n умножить на m) уникальных пермутаций соответственно, которые идентифицируются первой двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания, и для каждого из второго множества датчиков существуют (n умножить на m) уникальных пермутаций соответственно, которые идентифицируются второй двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания; и
соответствующее среднее значение давления связано с каждой из (n умножить на m) уникальных пермутаций каждой из первой и второй групп, причем каждое из соответствующих средних значений давления основано на ранее собранных показаниях давления, относящихся к зоне контакта.
26. Способ по п. 25, отличающийся тем, что:
среднее значение первого соответствующего столбца связано с каждым указательным значением осевого сегмента первого множества, причем каждое среднее значение первого соответствующего столбца включает среднее значение m соответствующих средних значений давления из первого множества, связанное с этим указательным значением осевого сегмента первого множества; и
среднее значение второго соответствующего столбца связано с каждым указательным значением осевого сегмента второго множества, причем каждое среднее значение второго соответствующего столбца включает среднее значение m соответствующих средних значений давления из второго множества, связанное с этим указательным значением осевого сегмента второго множества.
27. Способ по п. 26, включающий:
для каждого из множества сигналов, принятых с датчиков, который определяет показание давления:
определение указательного значения конкретного осевого сегмента и указательного значения конкретного сегмента отслеживания на основании осевого сегмента, связанного с этим сигналом, его определенного одного сегмента отслеживания, и генерирован ли этот сигнал первым множеством датчиков или вторым множеством датчиков;
выбор соответствующего среднего значения давления, связанного с указательным значением конкретного осевого сегмента и указательным значением конкретного сегмента отслеживания;
вычисление соответствующего скорректированного среднего значения давления путем вычитания:
одного из среднего значения первого соответствующего столбца или среднего значения второго соответствующего столбца, связанного с указательным значением конкретного осевого сегмента, по выбранному соответствующему среднему значению давления; и
вычисление соответствующего скорректированного значения показания давления путем вычитания соответствующего скорректированного среднего значения давления из принятого сигнала датчика.
28. Способ по п. 27, включающий:
вычисление профиля средних значений давления на основании соответствующих скорректированных значений показаний давления.
29. Способ по п. 16, включающий:
генерацию запускающего сигнала при каждом обороте сопряженного вала, причем идентификация углового положения сопряженного вала относительно контрольного положения осуществляется на основании самого последнего генерированного запускающего сигнала.
| Установка для приготовления бетонных смесей | 1983 |
|
SU1130485A1 |
| US 2010125428 A1, 20.05.2010 | |||
| WO 9625288 A1, 22.08.1996 | |||
| WO 9113337 A1, 05.09.1991 | |||
| US 8475347 B2, 02.07.2013 | |||
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОЙ ХАРАКТЕРИСТИКИ ВАЛА | 2003 |
|
RU2285903C2 |

