Изобретение относится к области машиностроения, а именно, к механизмам, предназначенным для передачи вращения между параллельными валами, оси которых могут иметь относительное перемещение, в частности для передачи вращения от планетарного колеса к валу.
Вследствие погрешностей при монтаже в реальных устройствах всегда имеется некоторая неточность взаимного расположения геометрических осей соединяемых валов, которая может изменяться под нагрузкой. Для устранения этого недостатка применяются различные механизмы, частным случаем которого являются жесткие компенсирующие муфты с промежуточным подвижным элементом. Муфты этого типа состоят из двух полумуфт и промежуточного диска. На внутреннем торце каждой полумуфты образовано по одному диаметрально расположенному пазу, причем пазы на полумуфтах перпендикулярны друг другу. Промежуточный диск имеет также диаметрально расположенные выступы. У собранной муфты выступы промежуточного диска располагаются в пазах полумуфт. Перпендикулярное расположение пазов позволяет муфте компенсировать несоосность валов. При этом, выступы скользят в пазах, а центр промежуточного диска совершает орбитальное движение (Поляков B.C. Барабаш И.Д. Муфты. Конструкции и расчет. Л., «Машиностроение», 1973 г., стр. 19). Такие муфты могут быть использованы и для передачи вращения в планетарной передаче, причем один и тот же механизм может использоваться в планетарных передачах с различным эксцентриситетом. Момент вращения передается за счет контакта боковой поверхности выступов промежуточного диска с аналогичной поверхностью пазов полумуфт, т.е. рабочей является плоская поверхность. Это говорит о значительной нагрузочной способности такого механизма.
Однако большим недостатком таких муфт является несовпадение центра масс промежуточного диска с осью вращения муфты. Это приводит к дисбалансу масс и к вызванным этим дисбалансом ударным нагрузкам, что ограничивает максимальную скорость вращения валов и не рекомендуется применение в реверсивных приводах.
В некоторых устройствах требуются механизмы, предназначенные для передачи вращения между параллельными валами, оси которых имеют значительные и постоянные смещения. Таков, например, механизм параллельных кривошипов, который используют для передачи вращения от сателлита, совершающего планетарное движение, к выходному звену планетарной передачи. Он представляет собой связанный с планетарным колесом диск с расположенными по периметру отверстиями На ведомом валу закреплен диск с пальцами, диаметр которых меньше диаметра отверстий на первом диске. При планетарном перемещении сателлита с одновременным вращением вокруг собственной оси пальцы ведомого диска обкатываются по отверстиям сателлита, не препятствуя его орбитальному движению, при этом они передают ведомому валу вращение сателлита вокруг собственной оси (Крайнев. А.Ф. «Идеология конструирования», Москва, 2003, «Издательство Машиностроение-1», стр. 261). Такой механизм обладает малой инерционностью, возможностью применения при высоких скоростях вращения валов и в реверсивных приводах. Рабочим участком данного механизма является линия контакта пальца с отверстием, то есть нагрузочная способность этого механизма ниже, чем предыдущего. К тому же механизм рассчитывается на конкретное фиксированное смещение параллельных осей и один и тот же механизм нельзя применять для других величин смещения.
Известна планетарная передача RU 2399813, включающая механизм передачи вращения между параллельными валами, принимаемый нами за прототип. Этот механизм содержит ведущее, ведомое и промежуточное звенья. На обращенных друг к другу сторонах ведущего и ведомого звеньев выполнены кулачковые профили. Ведущее звено выполнено с кулачковыми профилями в виде косых пазов на торцовой поверхности, ведомое звено выполнено с кулачковыми профилями в виде радиальных пазов на торцовой поверхности. Промежуточное звено представляет собой совокупность отдельных свободных элементов в виде шариков, которые сопрягаются с пазами ведущего и ведомого звеньев. Этот механизм имеет незначительный дисбаланс масс, может использоваться в реверсивных и скоростных приводах. Момент вращения передается за счет точечного контакта поверхности шарика с поверхностью пазов на ведущем и ведомом звеньях. Такой контакт обуславливает невысокую нагрузочную способность. К тому же силы, действующие на шарик со стороны пазов, приобретают осевую составляющую, которая расталкивает ведущее и ведомое звенья друг от друга, и необходимо предусматривать меры для компенсации этих осевых усилий.
Таким образом, задачей изобретения является создание конструкции малоинерционного механизма, позволяющего передавать вращение, как при постоянном параллельном смещении валов, так и при изменении этого смещения, а также работать без значительных ограничений по скорости и в реверсивных приводах.
Техническим результатом данного изобретения является повышение нагрузочной способности механизма при прочих равных условиях.
Указанный технический результат достигается тем, что заявленный механизм, как и прототип, содержит ведущее, ведомое звенья и промежуточное звено, расположенное между ними. На обращенных друг к другу сторонах ведущего и ведомого звеньев выполнены кулачковые профили. Промежуточное звено выполнено в виде совокупности отдельных свободных элементов, сопрягающихся с кулачковыми профилями ведущего и ведомого звеньев. В отличие от прототипа кулачковые профили ведущего и ведомого звеньев выполнены в виде системы прямолинейных пазов и/или выступов, ориентированных наклонно к радиусам звеньев, а отдельные свободные элементы промежуточного звена выполнены с плоскими направляющими поверхностями, перпендикулярными друг другу.
Таким образом, значительное увеличение нагрузочной способности достигается за счет того, что рабочей поверхностью является плоская направляющая поверхность.
Сущность изобретения поясняется следующими чертежами:
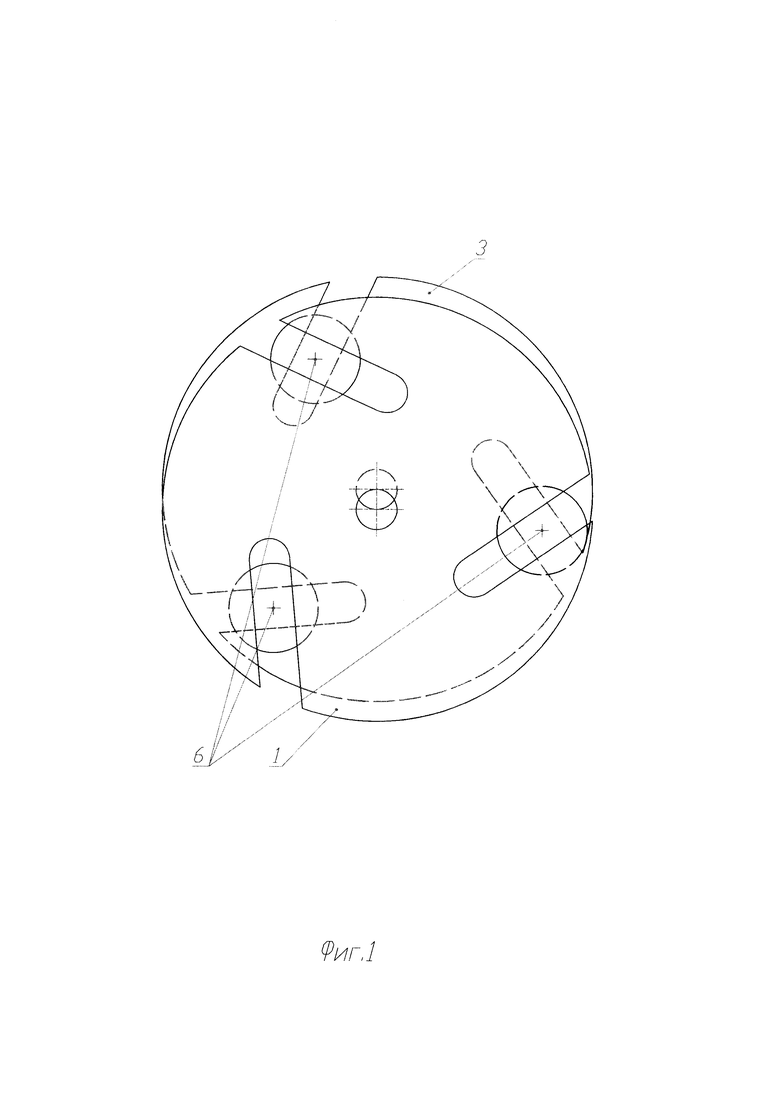
На фиг. 1 представлен вид с торца на один из вариантов заявленного механизма, в котором кулачковые профили ведущего и ведомого звеньев представляют собой пазы.
На фиг. 2 показан общий вид этого же механизма в разобранном виде.
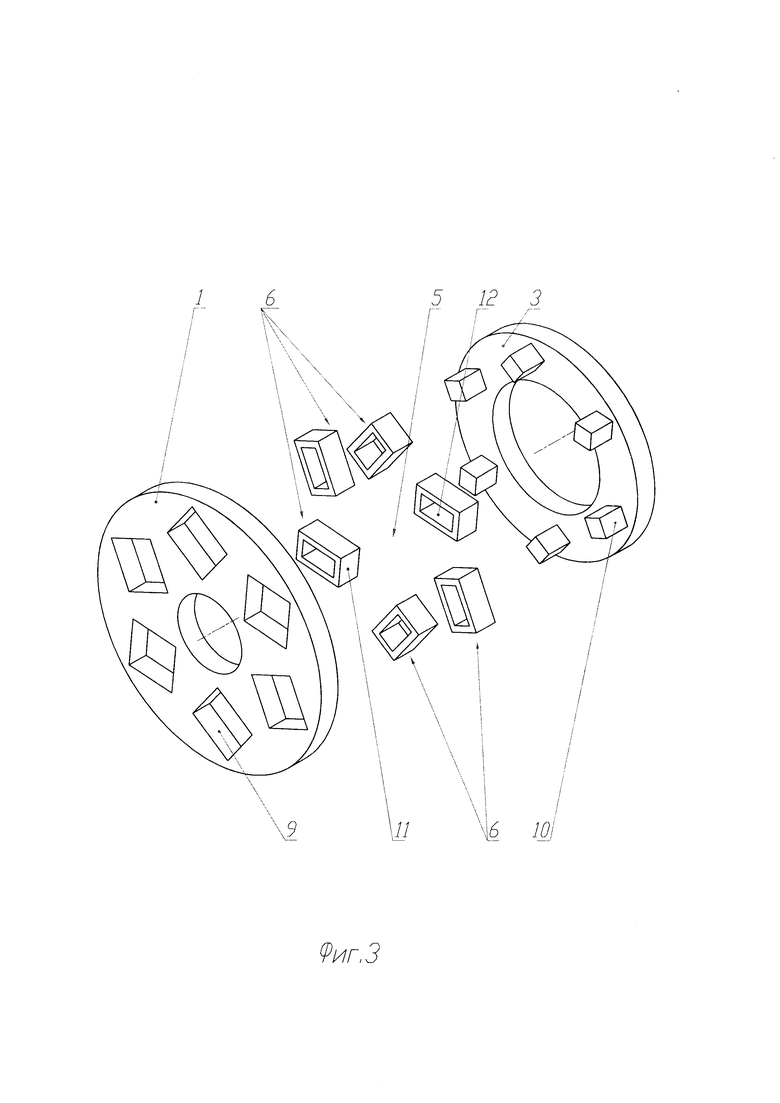
На фиг. 3 показан такой же вид механизма, в котором кулачковые профили на одном звене выполнены в виде пазов, а на другом в виде выступов.
Механизм передачи вращения между параллельными валами выполнен следующим образом (см. фиг. 1 и 2). Диск ведущего звена 1 имеет на торцах кулачковые профили в виде прямолинейных пазов 2 ориентированных наклонно к радиусу. Диск ведомого звена 3 имеет на торцах кулачковые профили также в виде прямолинейных пазов 4 ориентированных наклонно к радиусу. Диски ведущего 1 и ведомого 3 звеньев установлены так, что углы между пазами составляют 90 градусов.
Между ними находиться промежуточное звено 5, которое выполнено в виде совокупности отдельных свободных элементов 6. Каждый отдельный свободный элемент 6 из совокупности имеет вид диска с выступами 7 и 8 на противоположных торцах. Выступы 7 и 8 расположены вдоль диаметра диска и перпендикулярны друг другу. Выступы 7 и 8 имеют плоские направляющие поверхности и плотно входят в пазы 2 и 4 соответственно. Каждый отдельный свободный элемент 6 может быть выполнен в виде крестообразного элемента, где крест составляют перпендикулярные выступы 7 и 8.
На фиг. 3 диск ведущего звена 1 выполнен с кулачковыми профилями на торцах в виде прямолинейных пазов 9 наклонно ориентированных к радиусу. Диск ведомого звена 3 выполнен с наклонно ориентированными к радиусу кулачковыми профилями на торцах в виде прямолинейных выступов 10. Отдельные свободные элементы 6 промежуточного звена 5 выполнены в виде параллелепипедов с выступами 11 и пазами 12 на торцах перпендикулярными друг другу. При соприкосновении пазы 9 и выступы 10 дисков ведущего 1 и ведомого 3 звеньев сопрягаются с выступами 11 и пазами 12 отдельных свободных элементов соответственно.
Таким образом, крутящий момент передается от диска ведущего звена 1 к диску ведомого звена 3 (см. фиг. 2) через сопряжение плоских направляющих поверхностей выступов 7 и 8 отдельных свободных элементов 6 промежуточного звена 5 и плоскости пазов 2 и 4 дисков ведущего 1 и ведомого 3 звеньев. При смещении дисков ведущего 1 и ведомого 3 звеньев центр каждого отдельного свободного элемента 6 совершает орбитальное движение. При такой конструкции центр масс всегда находится в одной точке, то есть механизм является уравновешенным. Это позволяет использовать механизм без значительных ограничений по скорости вращения валов и в реверсивных приводах. За счет плоских направляющих поверхностей достигается значительная нагрузочная способность механизма; ее величина зависит от количества отдельных свободных элементов.
Работа механизма на фиг. 3 аналогична работе механизма на фиг. 1 и 2. Ведущим или ведомым звеном здесь может выступать любой из дисков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм передачи вращения между параллельными валами | 2021 |
|
RU2761158C1 |
| ФРИКЦИОННО-ПЛАНЕТАРНЫЙ МЕХАНИЗМ С КОСОЙ ШАЙБОЙ И БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА НА ЕГО ОСНОВЕ | 2000 |
|
RU2179671C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ "РЕДУКТОР-ПОДШИПНИК" | 2001 |
|
RU2179272C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| МОДУЛЬНАЯ ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2005 |
|
RU2298713C1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| ПЛАНЕТАРНЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ С ДВОЙНЫМИ САТЕЛЛИТАМИ | 2008 |
|
RU2355923C1 |
| ЗАЦЕПЛЕНИЕ КОЛЕС С КРИВОЛИНЕЙНЫМИ ЗУБЬЯМИ (ВАРИАНТЫ) И ПЛАНЕТАРНАЯ ПЕРЕДАЧА НА ЕГО ОСНОВЕ | 2007 |
|
RU2338105C1 |
| ЭКСЦЕНТРИКОВАЯ ШАРИКОВАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2007 |
|
RU2341710C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |

Изобретение относится к области машиностроения, а именно к механизмам, предназначенным для передачи вращения между параллельными валами, оси которых могут иметь относительное перемещение. Механизм передачи вращения между параллельными валами содержит ведущее (1) и ведомое (3) звенья. На их обращенных друг к другу сторонах выполнены кулачковые профили в виде системы прямолинейных пазов (2, 4), ориентированных наклонно к радиусу. Между ведущим (1) и ведомым (2) звеньями расположено промежуточное звено (5) в виде отдельных свободных элементов (6) с плоскими направляющими поверхностями, перпендикулярными друг другу. Достигается увеличение нагрузочной способности. 3 ил.
Механизм передачи вращения между параллельными валами, оси которых могут иметь относительное перемещение, содержащий ведущее и ведомое звенья, на обращенных друг к другу сторонах которых выполнены кулачковые профили, а также промежуточное звено между ведущим и ведомым звеньями в виде совокупности отдельных свободных элементов, сопрягающихся с кулачковыми профилями на ведущем и ведомом звеньях, отличающийся тем, что кулачковые профили ведущего и ведомого звеньев выполнены в виде системы прямолинейных пазов и/или выступов, ориентированных наклонно к радиусам звеньев, а отдельные свободные элементы промежуточного звена выполнены с плоскими направляющими поверхностями, перпендикулярными друг другу.
| RU 2008138496 A, 10.04.2010 | |||
| Бесступенчатая передача с тремя шестернями | 2016 |
|
RU2643097C2 |
| CN 206290594 U, 30.06.2017. | |||

