ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к управлению перепускной заслонкой для выхлопных газов в турбонагнетателе.
УРОВЕНЬ ТЕХНИКИ
Некоторые двигатели внутреннего сгорания используют компрессионное устройство, такое как турбонагнетатель, для повышения удельной выходной мощности/крутящего момента двигателя. В одном из примеров, турбонагнетатель может включать в себя компрессор и турбину, соединенные приводным валом, где турбина присоединена к стороне выпускного коллектора двигателя, а компрессор присоединен к стороне впускного коллектора двигателя. Таким образом, турбина с приводом от выхлопной системы подает энергию на компрессор, чтобы повышать давление (например, наддув или давление наддува) во впускном коллекторе и усиливать поток воздуха в двигатель. Наддув может регулироваться посредством регулировки количества газа, попадающего в турбину, например, посредством перепускной заслонки для выхлопных газов. Привод может быть функционально присоединен через рычажный механизм к клапану перепускной заслонки для выхлопных газов и приводиться в действие, чтобы позиционировать клапан перепускной заслонки для выхлопных газов где-нибудь между полностью открытым положением и полностью закрытым положением (например, на седле клапана), чтобы добиваться требуемого наддува, основанного на условиях работы. Привод может быть электрическим приводом, например, таким как электродвигатель.
В некоторых сценариях, электродвигатель может подвергаться воздействию высоких окружающих температур вследствие близкого потока выхлопных газов и может демонстрировать высокие температуры сам по себе, например, вследствие непрерывного прием высоких электрических токов - например, во время условий работы, в которых единообразно требуется максимальный наддув. По существу, оценка температуры электродвигателя может требоваться для избегания ухудшенной работы электродвигателя и ухудшения характеристик самого электродвигателя.
В US 2013/0312406 (МПК F02B 37/18, опубл. 28.11.2013) описывает способ управления электрическим приводом для устройства клапана перепускной заслонки для выхлопных газов турбонагнетателя с приводом от выхлопных газов. В частности, температура электрического привода может оцениваться по напряжению двигателя, подаваемому на привод, напряжению аккумуляторной батареи и его рабочему току на основании расчетной модели.
В US 7,006,911 (МПК F16K 31/02, опубл. 28.02.2006) описывает систему для оценивания температуры электрического привода. В одном из примеров, температура электрического привода оценивается отчасти на основании температурного коэффициента сопротивления, который представляет собой сопротивление обмотки электродвигателя.
Авторы в материалах настоящего описания выявили несколько проблем у таких подходов. Во-первых, оценки температуры электродвигателя на основании напряжения, подаваемого на электродвигатель, и его рабочего тока, могут быть неточными и, в некоторых сценариях, могут приводить к заниженной оценке температуры, которая могла бы приводить к ухудшенной работе электродвигателя и, таким образом, к ухудшенному управлению наддувом. Точность оценивания температуры электродвигателя в таком подходе может дополнительно понижаться, так как не учитываются другие вклады в температуру электродвигателя, такие как температура окружающей среды, отчасти обусловленная ближайшим потоком выхлопных газов. Во-вторых, действия, предпринятые для предотвращения ухудшения характеристик электродвигателя, могут превышать то, что необходимо для обеспечения нормальной работы электродвигателя, к примеру, снижение тока, подаваемого в электродвигатель, на чрезмерную величину или совсем прекращение подачи тока, которые могут значительно уменьшать наддув ниже требуемого уровня наддува и оказывать неблагоприятное влияние на впечатление водителя транспортного средства. В качестве альтернативы, снижение тока, подаваемого в электродвигатель, может быть недостаточным для избегания ухудшенной работы электродвигателя.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Таким образом, предусмотрены способы управления подачей тока в привод перепускной заслонки для выхлопных газов на основании температуры.
В одном из аспектов предложен способ работы перепускной заслонки для выхлопных газов, включающий в себя этапы, на которых:
определяют предельное значение электрического тока привода перепускной заслонки для выхлопных газов и ограничивают величину наддува в ответ на предельное значение электрического тока и на основании условий окружающей среды, посредством контроллера,
причем ограничение величины наддува включает в себя этап, на котором устанавливают привод перепускной заслонки для выхлопных газов в положении посредством подачи самое большее электрического тока, равного предельному значению электрического тока, на привод перепускной заслонки для выхлопных газов,
при этом предельное значение электрического тока определяют на основании температуры привода перепускной заслонки для выхлопных газов, определяемой на основании условий окружающей среды, включающих в себя температуру окружающей среды, ближайшей к приводу перепускной заслонки для выхлопных газов.
В одном из вариантов предложен способ, в котором температуру окружающей среды оценивают на основании множества условий работы двигателя, скорости транспортного средства и положения радиаторных заслонок.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором ограничивают количество топлива, подаваемое в двигатель, пропорционально степени, с которой ограничивается наддув.
В одном из дополнительных аспектов предложен способ работы перепускной заслонки для выхлопных газов, включающий в себя этапы, на которых:
изменяют электрический ток, подаваемый в привод перепускной заслонки для выхлопных газов, в ответ на требуемый наддув и текущий наддув;
определяют максимально допустимый электрический ток на основании температуры привода, и
уменьшают мгновенный электрический ток, подаваемый в привод в ответ на мгновенный электрический ток, превышающий максимально допустимый электрический ток, посредством контроллера,
причем температуру привода определяют на основании температуры среды, окружающей привод,
при этом электрический ток, подаваемый в привод, управляет положением привода.
В одном из вариантов предложен способ, в котором уменьшение мгновенного электрического тока включает в себя этап, на котором уменьшают мгновенный электрический ток до максимально допустимого электрического тока.
В одном из вариантов предложен способ, в котором мгновенный электрический ток непрерывно подают в привод в течение по меньшей мере пороговой продолжительности времени.
В одном из вариантов предложен способ, в котором температуру привода дополнительно определяют на основании температуры обмотки привода.
В одном из вариантов предложен способ, в котором температура обмотки основана на двух или более измерениях сопротивления обмотки привода, подвергнутых выборке отсчетов на всем протяжении по меньшей мере половины полного оборота ротора привода.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором ограничивают наддув, подаваемый в двигатель, понижением мгновенного электрического тока, подаваемого в привод.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором сообщают об ограничении наддува посредством установки диагностического кода.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором устанавливают и поддерживают привод в положении подачей не большего, чем максимально допустимый, электрического тока в привод.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором ограничивают топливо, подаваемое в двигатель.
В одном из еще дополнительных аспектов предложен способ работы электрического привода перепускной заслонки для выхлопных газов, включающий в себя этапы, на которых:
определяют максимально допустимый ток обмотки на основании температуры привода;
определяют то, что требуемый ток привода, основанный на требуемом наддуве и текущем наддуве, превышает максимально допустимый ток обмотки, и
посредством контроллера, подают в привод ток, меньший чем требуемый ток привода,
причем температуру привода определяют на основании температуры окружающей среды, окружающей привод, и
ток, подаваемый в привод, управляет положением привода.
В одном из вариантов предложен способ, в котором подача тока, меньшего, чем требуемый ток привода, в привод включает в себя этап, на котором подают максимально допустимый ток обмотки.
В одном из вариантов предложен способ, в котором температуру привода дополнительно определяют на основании температуры обмотки привода.
В одном из вариантов предложен способ, в котором температуру обмотки определяют на основании многочисленных измерений сопротивления обмотки на всем протяжении минимального диапазона поворота ротора привода в выбранных условиях наддува.
В одном из примеров, способ работы перепускной заслонки для выхлопных газов содержит ограничение величины наддува в ответ на предельное значение тока, основанное на температуре привода перепускной заслонки для выхлопных газов.
В более конкретном примере, ограничение величины наддува включает в себя установку привода перепускной заслонки для выхлопных газов в наилучшем возможном положении посредством подачи самое большее тока, равного предельному значению тока, на привод перепускной заслонки для выхлопных газов.
В еще одном аспекте примера, температура является температурой окружающей среды, ближайшей к приводу перепускной заслонки для выхлопных газов.
В еще одном другом аспекте примера, способ дополнительно содержит ограничение количества топлива, подаваемого в двигатель.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания, когда воспринимаются по отдельности или в связи с прилагаемыми чертежами.
Следует понимать, что раскрытие изобретения, приведенное выше, представлено для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Не предполагается идентифицировать ключевые или существенные признаки заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен вариантами осуществления, которые исключают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
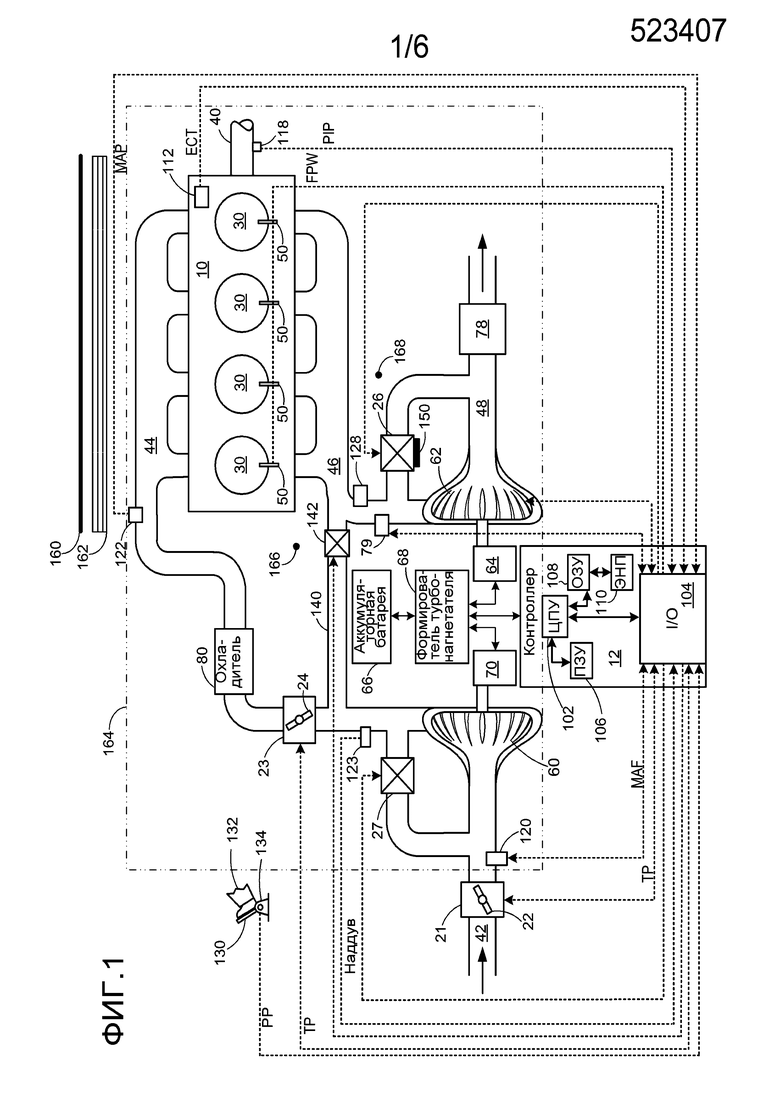
Фиг. 1 показывает структурную схему двигателя с турбонаддувом, содержащего перепускную заслонку для выхлопных газов.
Фиг. 2 показывает примерное устройство перепускной заслонки для выхлопных газов у перепускной заслонки для выхлопных газов по фиг. 1.
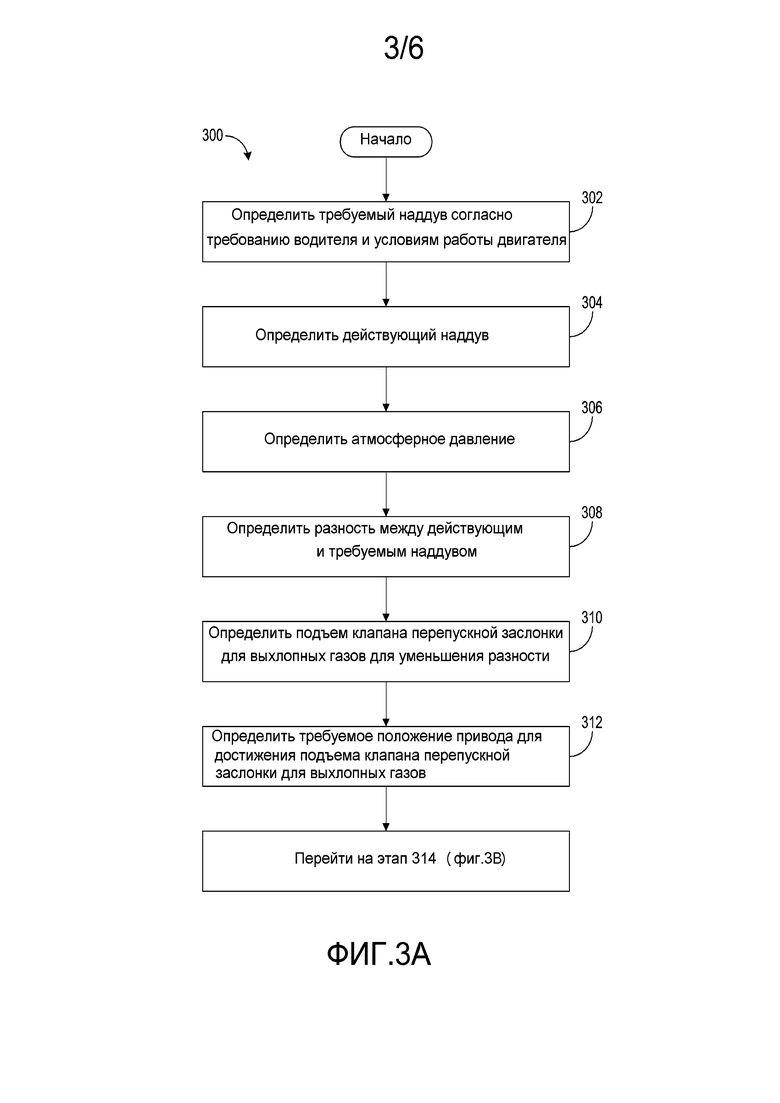
Фиг. 3A и 3B показывают блок-схему последовательности операций способа, иллюстрирующую способ управления турбонагнетателем, связанным с устройством перепускной заслонки для выхлопных газов по фиг. 2.
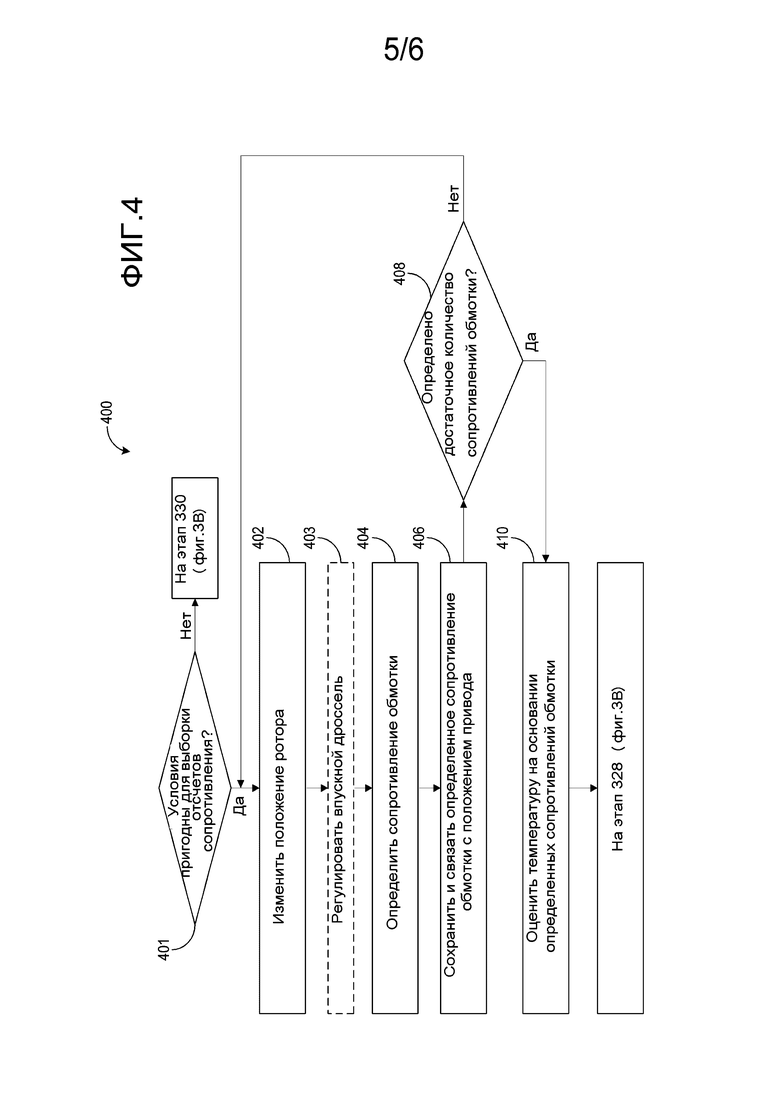
Фиг. 4 показывает блок-схему последовательности операций способа, иллюстрирующую способ определения температуры привода устройства перепускной заслонки для выхлопных газов по фиг. 2 на основании сопротивления обмотки.
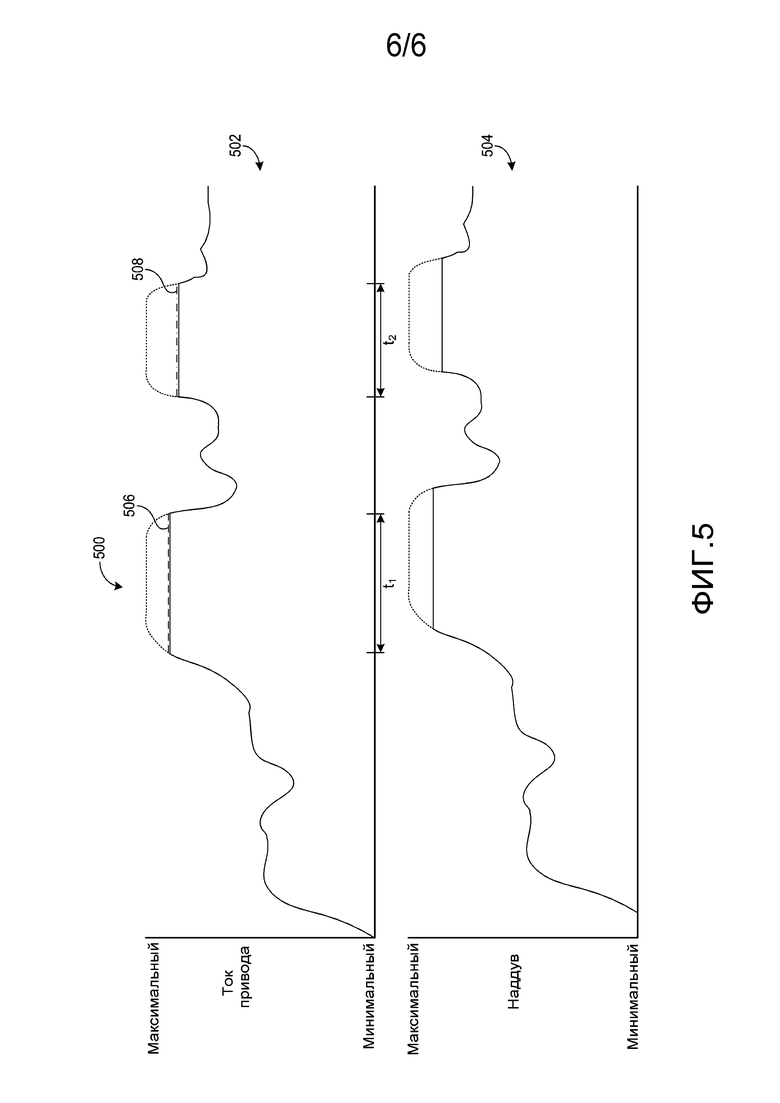
Фиг. 5 показывает график, иллюстрирующий ток привода и ограничение наддува согласно способу по фиг. 3 для примерного ездового цикла.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Как описано выше, некоторые двигатели внутреннего сгорания могут использовать компрессионное устройство, такое как турбонагнетатель, для усиления потока воздуха в двигатель и, таким образом, повышения выходных крутящего момента/мощности. Давление, подаваемое во впускной коллектор, в дальнейшем указываемое ссылкой как «наддув» или «давление наддува», может регулироваться посредством регулировки количества газа, достигающего турбины турбонагнетателя, например, через перепускную заслонку для выхлопных газов. Привод, такой как электрический привод (например, электродвигатель) может быть оперативно присоединен к клапану перепускной заслонки для выхлопных газов и приводиться в положение, в котором перепускная заслонка для выхлопных газов где-нибудь между полностью открытым положением и полностью закрытым положением, чтобы добиваться требуемого наддува на основании условий работы.
В некоторых сценариях, электрический привод может подвергаться высоким температурам, обусловленным высокими температурами близких выхлопных газов и непрерывному прикладыванию электрического тока, например, во время условий, когда единообразно запрашивается максимальный наддув, и клапан перепускной заслонки для выхлопных газов поддерживается в положении с высоким удерживающим усилием. Соответственно, определение температуры привода может требоваться для предотвращения ухудшенной работы привода и, таким образом, ухудшенного управления наддувом.
В примере, такой электрический привод является электродвигателем, температура электродвигателя может оцениваться на основании оцененного сопротивления с учетом напряжения, подаваемого на электродвигатель, и его рабочего тока электродвигателя. В других подходах, температура может оцениваться отчасти на основании модели накопления энергии, которая интегрирует ток, подаваемый в электродвигатель, со временем.
Однако, оценка температуры электродвигателя на основании напряжения, подаваемого на электродвигатель, и его рабочего тока может быть неточной и, в некоторых сценариях, может давать в результате недостаточную защиту или избыточную защиту привода, что могло бы приводить к ухудшенной работе электродвигателя и/или ухудшенному управлению наддувом. Например, действия, предпринятые для предотвращения ухудшения характеристик электродвигателя, могут превышать то, что необходимо для обеспечения нормальной работы электродвигателя, к примеру, снижение тока, подаваемого в электродвигатель, на чрезмерную величину или совсем прекращение подачи тока, которые могут значительно уменьшать наддув ниже требуемого уровня наддува и оказывать неблагоприятное влияние на впечатление водителя транспортного средства. В качестве альтернативы, снижение тока, подаваемого в электродвигатель, может быть недостаточным для избегания ухудшенной работы электродвигателя.
Таким образом, предусмотрены различные способы управления подачей тока в привод перепускной заслонки для выхлопных газов на основании температуры. В одном из примеров, способ работы перепускной заслонки для выхлопных газов содержит ограничение величины наддува в ответ на предельное значение тока на основании температуры привода перепускной заслонки для выхлопных газов. Фиг. 1 показывает структурную схему двигателя с турбонаддувом, включающего в себя перепускную заслонку для выхлопных газов, фиг. 2 показывает примерное устройство перепускной заслонки для выхлопных газов у перепускной заслонки для выхлопных газов по фиг. 1, фиг. 3A и 3B показывают блок-схему последовательности операций способа, иллюстрирующую способ управления турбонагнетателем, связанным с устройством перепускной заслонки для выхлопных газов по фиг. 2, Фиг. 4 показывает блок-схему последовательности операций способа, иллюстрирующую способ определения температуры привода устройства перепускной заслонки для выхлопных газов по фиг. 2 на основании сопротивления обмотки, и Фиг. 5 показывает график, иллюстрирующий ток привода и ограничение наддува согласно способу по фиг. 3 для примерного ездового цикла. Двигатель по фиг. 1 также включает в себя контроллер, выполненный с возможностью выполнять способы, изображенные на фиг. 3A, 3B и 4.
Фиг. 1 - схематичное изображение, показывающее примерный двигатель 10, который может быть включен в силовую установку автомобиля. Двигатель 10 показан с четырьмя цилиндрами 30. Однако, другие количества цилиндров могут использоваться в соответствии с данным раскрытием. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Каждая камера 30 сгорания (например, цилиндр) двигателя 10 может включать в себя стенки камеры сгорания с поршнем (не показан), расположенными в них. Поршни могут быть присоединены к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии (не показана). Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10.
Камеры 30 сгорания могут принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42 и могут выпускать выхлопные газы через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут избирательно сообщаться с камерой 30 сгорания через соответствующие впускные клапаны и выпускные клапаны (не показаны). В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Топливные форсунки 50 показаны присоединенными непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12. Таким образом, топливная форсунка 50 обеспечивает то, что известно в качестве непосредственного впрыска топлива в камеру 30 сгорания. Топливная форсунка, например, может быть установлена сбоку камеры сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 50 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива. В некоторых вариантах осуществления, камеры 30 сгорания, в качестве альтернативы или дополнительно, могут включать в себя топливную форсунку, расположенную во впускном коллекторе 44, в конфигурации, которая предусматривает то, что известно как оконный впрыск топлива во впускное окно выше по потоку от каждой камеры 30 сгорания.
Впускной канал 42 может включать в себя дроссель 21 и 23, имеющий дроссельные заслонки 22 и 24, соответственно. В этом конкретном примере, положение дроссельных заслонок 22 и 24 может регулироваться контроллером 12 посредством сигналов, выдаваемых на привод, включенный в состав дросселями 21 и 23. В одном из примеров, приводы могут быть электроприводами (например, электродвигателями), конфигурацией, которая обычно указывается ссылкой как электронное управление дросселем (ETC). Таким образом, заслонки 21 и 23 могут приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, между другими цилиндрами двигателя. Положение дроссельных заслонок 22 и 24 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канал 42 дополнительно может включать в себя датчик 120 массового расхода воздуха, датчик 122 давления воздуха в коллекторе и датчик 123 давления на входе дросселя для выдачи соответствующих сигналов MAF (массового расхода воздуха), MAP (давления воздуха в коллекторе) в контроллер 12.
Выпускной канал 48 может принимать выхлопные газы из цилиндров 30. Датчик 128 выхлопных газов показан присоединенным к выпускному каналу 48 выше по потоку от турбины 62 и устройства 78 снижения токсичности выхлопных газов. Датчик 128 может быть выбран из числа различных пригодных датчиков для выдачи показания топливно-воздушного соотношения в выхлопных газах, например, таких как линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик кислорода в выхлопных газах), двухрежимный кислородный датчик или EGO, датчик NOx, HC, или CO. Датчик 128, в качестве альтернативы, может быть расположен ниже по потоку от турбины 62. Устройство 78 снижения токсичности выхлопных газов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности выхлопных газов или их комбинациями.
В некоторых вариантах осуществления, температура выхлопных газов может логически выводиться на основании условий работы двигателя, таких как скорость вращения, нагрузка, отношение количества воздуха к количеству топлива (AFR), запаздывание искрового зажигания, и т.д. В других вариантах осуществления, датчик 79 температуры выпускной стороны может быть расположен выше по потоку от входной стороны турбины 62 и ниже по потоку на выходной стороне выпускного коллектора 46. Датчик 79 температуры выпускной стороны, в особенности, может быть выполнен с возможностью считывать температуру газов, текущих через выпускной канал 48, и передавать считанную температуру в качестве сигнала ET в контроллер 12. Датчик 79, например, может быть термопарой. В более общем смысле, температура выхлопных газов может измеряться датчиком 79 и/или другими датчиками, не показанными, расположенными в выпускном канале 48. В других вариантах осуществления, датчик 79 температуры выпускной стороны может быть сконфигурирован иным образом - например, датчик температуры выпускной стороны может быть выполнен с возможностью считывать температуру на входе турбины 62.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, энергонезависимую память 110 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру хладагента двигателя (ECT) с датчика 112 температуры, схематично показанного в одном месте в пределах двигателя 10; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя, как обсуждено; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122, как обсуждено. Сигнал скорости вращения двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе 44. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время стехиометрической работы, датчик MAP может давать показание крутящего момента двигателя. Кроме того, этот датчик, наряду с выявленным скоростью вращения двигателя, может давать оценку заряда (включающего в себя воздух), введенного в цилиндр. В одном из примеров, датчик 118, который также используется в качестве датчика скорости вращения двигателя, может вырабатывать заданное количество равноразнесенных импульсов каждый оборот коленчатого вала 40. В некоторых примерах, постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машиночитаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
Двигатель 10 дополнительно может содержать компрессорное устройство, такое как турбонагнетатель или нагнетатель, включающий в себя по меньшей мере компрессор 60, расположенный вдоль впускного коллектора 44. Что касается турбонагнетателя, компрессор 60 может по меньшей мере частично приводиться в действие турбиной 62, например, через вал или другое соединительное устройство. Турбина 62 может быть расположена вдоль выпускного канала 48 и сообщаться с выхлопными газами, текущими через него. Различные устройства могут быть предусмотрены для осуществления привода компрессора. Что касается нагнетателя, компрессор 60 может по меньшей мере частично приводиться в движение двигателем и/или электрической машиной и может не включать в себя турбину. Таким образом, величина сжатия, обеспечиваемого для одного или более цилиндров двигателя посредством турбонагнетателя или нагнетателя, может регулироваться контроллером 12. В некоторых случаях, турбина 62, например, может приводить в движение электрогенератор 64 для выдачи энергии в аккумуляторную батарею 66 через приводной механизм 68 турбонагнетателя. Энергия из аккумуляторной батареи 66 затем может использоваться для приведения в движение компрессора 60 посредством электродвигателя 70. Кроме того, датчик 123 может быть расположен во впускном коллекторе 44 для выдачи сигнала BOOST (НАДДУВ) в контроллер 12.
Кроме того, выпускной канал 48 может включать в себя перепускную заслонку 26 для выхлопных газов для отвода выхлопных газов от турбины 62. В некоторых вариантах осуществления, перепускная заслонка 26 для выхлопных газов может быть многоступенной перепускной заслонкой для выхлопных газов, таким как двухступенная перепускная заслонка для выхлопных газов с первой ступенью, выполненной с возможностью регулировать давление наддува, и второй ступенью, выполненной с возможностью увеличивать тепловой поток в устройство 78 снижения токсичности выхлопных газов. Перепускная заслонка 26 для выхлопных газов может приводиться в действие приводом 150, который, например, может быть электрическим приводом, таким как электродвигатель, хотя пневматические приводы также предполагаются. Впускной канал 42 может включать в себя перепускной клапан 27 компрессора, выполненный с возможностью отводить всасываемый воздух вокруг компрессора 60. Перепускная заслонка 26 для выхлопных газов и/или перепускной клапан 27 компрессора могут управляться контроллером 12 через исполнительные механизмы (например, привод 150), например, чтобы открываться, когда требуется более низкое давление наддува.
Впускной канал 42 может дополнительно включать в себя охладитель 80 наддувочного воздуха (CAC) (например, промежуточный охладитель) для понижения температуры нагнетаемых турбонагнетателем или нагнетателем всасываемых газов. В некоторых вариантах осуществления, охладитель 80 наддувочного воздуха может быть воздушно-воздушным теплообменником. В других вариантах осуществления охладитель 80 наддувочного воздуха может быть воздушно-жидкостным теплообменником.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции выхлопных газов (EGR) может направлять требуемую порцию выхлопных газов из выпускного канала 48 во впускной канал 42 через канал 140 EGR. Величина EGR, выдаваемой во впускной канал 42, может регулироваться контроллером 12 посредством клапана 142 EGR. Кроме того, датчик EGR (не показан) может быть расположен внутри канала EGR и может выдавать показание одного или более из давления, температуры, концентрации выхлопных газов. В качестве альтернативы, EGR может управляться посредством расчетного значения, основанного на сигналах с датчика MAF (выше по потоку), MAP (впускного коллектора), MAT (температуры газа в коллекторе) и датчика скорости вращения коленчатого вала. Кроме того, EGR может управляться на основании датчика O2 выхлопных газов и/или кислородного датчика на впуске (впускного коллектора). В некоторых условиях, система EGR может использоваться для регулирования температуры смеси воздуха и топлива в пределах камеры сгорания. Фиг. 1 показывает систему EGR высокого давления, где EGR направляется из выше по потоку от турбины турбонагнетателя в ниже по потоку от компрессора турбонагнетателя. В других вариантах осуществления, двигатель, дополнительно или в качестве альтернативы, может включать в себя систему EGR низкого давления, где EGR направляется из ниже по потоку от турбины турбонагнетателя в выше по потоку от компрессора турбонагнетателя.
Фиг. 1 также в целом показывает часть передней части 160 транспортного средства, заслонок 162 облицовки радиатора, расположенных в передней части транспортного средства и моторного отсека 164, по меньшей мере частично вмещающего множество компонентов, в том числе, двигатель 10. Положение (например, угол поворота ребер) заслонок 162 облицовки радиатора может управляться двигателем 12, например, чтобы регулировать уровни воздуха, засасываемые в моторный отсек 164. Положение заслонки облицовки радиатора может использоваться наряду с другими рабочими параметрами, такими как скорость транспортного средства, для оценивания температуры окружающей среды. В частности, может оцениваться температура окружающей среды области внутри моторного отсека 164; в одном из примеров, температура окружающей среды может соответствовать температуре воздуха, окружающего и находящегося ближе к приводу 150 перепускной заслонки для выхлопных газов (например, в положении 166), или, в еще одном примере, температура окружающей среды может соответствовать температуре воздуха в непосредственной близости от, и ближайшего к приводу перепускной заслонки для выхлопных газов (например, в положении 168).
Далее, с обращением к фиг. 2, показано примерное устройство 200 перепускной заслонки для выхлопных газов. Перепускная заслонка 200 для выхлопных газов, например, может быть перепускной заслонкой 26 для выхлопных газов по фиг. 1. Перепускная заслонка 200 для выхлопных приводится в действие приводом 202, который может быть приводом 150 на фиг. 1. В этом примере, привод 202 является электрическим приводом, таким как электродвигатель. В некоторых примерах, привод 202, в частности, может быть поворотным приводом, имеющим элемент, который подвергается вращению, чтобы, тем самым, изменять положение привода. Выходной вал 201 привода 202 присоединен к рычажному механизму 204 и, в частности, первому звену 206 рычажного механизма. Как показано, рычажный механизм 204 в проиллюстрированном варианте осуществления является четырехзвенным, хотя возможны другие рычажные механизмы, такие как линейная тяга. Рычажный механизм 204 движется вокруг двух шарниров, в том числе, первого шарнира 208, вокруг которого вращаются первое звено 206 и второе звено 210, и второго шарнира 212, вокруг которого вращаются третье звено 214 и четвертое звено 216. Первое, второе, третье и четвертое звенья 206, 210, 214 и 216 обычно присоединены друг к другу для формирования рычажного механизма 204 в качестве непрерывной детали. На конце, противоположном приводу 202, рычажный механизм 204 присоединен, на четвертом звене 216, к клапану 218 перепускной заслонки для выхлопных газов, который может быть расположен в полностью открытом положении, полностью закрытом положении или где-нибудь между ними, относительно седла 220 клапана. Седло 220 клапана показано в качестве являющегося расположенного в участке выпускного канала 222, который, например, может быть выпускным каналом 48 двигателя 10 на фиг. 1. Посредством позиционирования клапана 218 перепускной заслонки для выхлопных газов этим непрерывно регулируемым образом, может регулироваться количество выхлопных газов, достигающих турбины (например, турбины 62 по фиг. 1) турбонагнетателя. Таким образом, давление наддува, подаваемое в двигатель, такой как двигатель 10 по фиг. 1, может регулироваться согласно требуемому наддуву и другим условиям работы. Положение клапана 218 перепускной заслонки для выхлопных газов у перепускной заслонки 200 для выхлопных газов особенно может регулироваться посредством приведения в действие привода 202 и расположения его выходного вала 201, перемещения которого могут передаваться на клапан для выхлопных газов через рычажный механизм 204.
Как показано, перепускная заслонка 200 для выхлопных газов дополнительно включает в себя датчик 224 положения, который может быть выполнен с возможностью измерять изменения угла выходного вала 201, чтобы, тем самым, оценивать расположение клапана 218 перепускной заслонки для выхлопных газов. В некоторых примерах, может применяться измерительный преобразователь вращательного движения, выполненный с возможностью считывать угол поворота вращающегося компонента в приводе 202, причем, импульсы, сформированные из него, отправляются в контроллер 12 на фиг. 1. Датчик 224 положения, однако, может быть приспособлен для вариантов осуществления, в которых рычажный механизм с линейной тягой используется вместо четырехзвенной конфигурации, показанной на фиг. 2. В любом случае, измерение датчиком 224 положения может использоваться для определения положения клапана 218 перепускной заслонки для выхлопных газов, в особенности, расстояния от верхней поверхности седла 220 клапана до нижней поверхности клапана 218 перепускной заслонки для выхлопных газов. В других вариантах осуществления, однако, положение клапана перепускной заслонки для выхлопных газов может определяться на основании программной модели с использованием одного или более сигналов (например, Наддув), описанных выше со ссылкой на фиг. 1, и отправляться в контроллер 12.
Следует принимать во внимание, что перепускная заслонка 200 для выхлопных газов и различные ее компоненты могут быть модифицированы, не выходя из объема этого раскрытия. Например, датчик тока и/или датчик усилия могут быть включены в состав приводом 202 вместо или в дополнение к датчику 224 положения. Считыванию тока может оказываться содействие посредством датчика или зонда, или, в других примерах, может рассчитываться на основании закона Ома (или другой зависимости) в качестве отношения напряжения на приводе (например, напряжения на клеммах) и сопротивления (например, сопротивления обмотки) привода, если эти две величины известны или могут быть измерены или логически выведены. Кроме того, как описан выше, другие типы рычажных механизмов могут быть предусмотрены для соединения привода 202 с клапаном 218 перепускной заслонки для выхлопных газов, в том числе, но не в качестве ограничения, линейная тяга. Более того, смещающий элемент (не показан) может быть присоединен к клапану 218 перепускной заслонки для выхлопных газов, чтобы располагать клапан в положении по умолчанию, когда клапан не приводится в действие приводом 202.
На рабочих температурах выше порогового значения, привод 202 может становиться с ухудшенными рабочими характеристиками. По существу, может предприниматься попытка определения рабочей температуры привода 202, причем, различные действия предпринимаются, если рабочая температура превышает нижнее пороговое значение. Многообразие факторов может вносить вклад в рабочую температуру привода 202, в материалах настоящего описания указываемую ссылкой как «температура привода». «Температура привода», в качестве используемой в материалах настоящего описания, в частности, указывает ссылкой на температуру обмоток привода 202, и, как подробнее описано ниже, может логически выводиться на основании определения температуры окружающей среды, окружающей привод, или, в других вариантах осуществления, прямой оценки температуры обмотки на основании определения сопротивления обмоток. Так как температуры окружающей среды в среде (например, узле 200 перепускной заслонки для выхлопных газов), окружающей привод 202, может оказывать значительное влияние на температуру привода, по существу, температуры окружающей среды могут находиться под влиянием потока ближайших выхлопных газов, таких как выхлопные газы, текущие через выпускной канал 222, узел 200 перепускной заслонки для выхлопных газов может включать в себя датчик 226 температуры, выполненный с возможностью считывать температуру окружающей среды, окружающей привод 202, которая, в некоторых примерах, может использоваться для определения температуры привода. В других примерах, окружающая температура может оцениваться на основании различных условий работы двигателя и транспортного средства. Например, условия работы могут включать в себя температуру окружающей среды, скорость вращения двигателя, нагрузку двигателя, скорость транспортного средства и положение радиаторных заслонок (например, угол поворота ребер заслонки 162 облицовки радиатора по фиг. 1). Как описано выше, окружающая температура может соответствовать области, в целом ближайшей к приводу 202 перепускной заслонки для выхлопных газов (например, соответствующей положению 166 по фиг. 1), или области, ближайшей к и находящейся в непосредственной близости от привода (например, соответствующей положению 168 по фиг. 1).
Что касается вариантов осуществления, в которых температура окружающей среды, окружающая привод 202, используется для определения температуры привода, максимальный ток, который может подаваться в привод, может определяться для данной окружающей температуры. Например, следующая зависимость может давать температуру обмоток привода 202 в зависимости от времени: T(t)=I2*R*KT*(1-e-t/τ)+TE, где T - температура обмотки привода (например, используемая в некоторых примерах в качестве температуры привода), t - время, I - ток обмотки, R - сопротивление обмотки, KT - тепловое сопротивление обмоток (например, в единицах измерения °C/Вт), τ - тепловая постоянная времени, TE - окружающая температура (например, логически выведенная, как описано выше, или основанная на выходном сигнале с датчика 226 температуры). В пределе, в котором t стремится к бесконечности, однако, зависимость принимает следующую форму: T=I2*R*KT+TE. Максимальный ток, который может бесконечно подаваться в привод, таким образом, может определяться на основании этой зависимости согласно следующей перестроенной зависимости: IMAX=sqrt((TMAX–TE)/(R*KT)), где IMAX - максимальный постоянный ток, который может подаваться в привод бесконечно (в материалах настоящего описания указываемый ссылкой как «максимально допустимый ток»), а TMAX - максимально допустимая температура обмотки - то есть, максимальная температура, которую могут допускать обмотки привода 202 до подвергания ухудшению характеристик. В некоторых примерах, максимально допустимая температура обмотки может определяться автономно на основании известных свойств привода 202.
В других примерах, максимально допустимый ток может определяться на основании интерактивного определения температуры обмотки, в качестве альтернативы или в дополнение к окружающей температуре. Что касается вариантов осуществления, в которых температура обмотки определяется интерактивно и используется вместо окружающей температуры, максимально допустимый ток может определяться на основании разности между мгновенной температурой обмотки и максимально допустимой температурой обмотки. В некоторых примерах, изменения у тока, подаваемого в привод 202, могут быть пропорциональными этой разности.
В некоторых вариантах осуществления, мгновенная температура обмотки привода 202 может определяться на основании сопротивления обмотки привода, которое, в свою очередь, может определяться на основании среднего значения многочисленных подвергнутых выборке отсчетов сопротивлений обмотки ротора привода на всем диапазоне поворота ротора. Выборка отсчетов и усреднение сопротивлений обмотки на многочисленных углах поворота ротора на всем диапазоне поворота (например, полном обороте 360°, половине полного оборота 180°, и т.д.) таким образом могут повышать точность оценивания сопротивления обмотки и оценивания температуры привода, так как сопротивление обмотки может быть зависящим от положения ротора в электродвигателе. Данное сопротивление обмотки может определяться различными пригодными способами, в том числе, но не в качестве ограничения, измерением напряжения и тока, подаваемых на привод 202. Считывание тока, например, может облегчаться посредством датчика или детектора тока, описанного выше. Усредненное сопротивление обмотки, в таком случае, может связываться с температурой обмотки на основании известных свойств материала обмоток, например, посредством справочной таблицы. Способ 400, показанный на фиг. 4 и описанный ниже, может применяться для получения сопротивлений обмотки во время согласующихся рабочих интервалов.
Фиг. 3A и 3B показывают блок-схему последовательности операций способа, иллюстрирующую способ 300 для управления турбонагнетателем, связанным с устройством 200 перепускной заслонки для выхлопных газов по фиг. 2. Способ 300 может выполняться контроллером двигателя (например, контроллером 12 по фиг. 1) и использоваться для управления турбонагнетателем посредством перепускной заслонки для выхлопных газов (например, перепускной заслонки 200 для выхлопных газов по фиг. 2). Привод 202 перепускной заслонки для выхлопных газов по фиг. 2, в частности, может использоваться для приведения в действие перепускной заслонки для выхлопных газов. В одном из примеров, способ управления турбонагнетателем посредством перепускной заслонки для выхлопных газов может содержать определение требуемого давления наддува и действующего давления наддува. Перепускная заслонка для выхлопных газов может регулироваться согласно разности между требуемым давлением наддува и действующим давлением наддува.
На этапе 302, способ включает в себя определение требуемого наддува согласно требованию водителя и условиям работы двигателя. Оцениваемые условия могут непосредственно измеряться датчиками, например, такими как датчики 112, 118, 120, 122, 123 и 134, и/или условия могут оцениваться по другим условиям работы двигателя. Оцениваемые условия могут включать в себя температуру хладагента двигателя, температуру моторного масла, массовый расход воздуха (MAF), давление в коллекторе (MAP), наддув (например, давление наддува с датчика 123), скорость вращения двигателя, скорость вращения холостого хода, барометрическое давление, требуемый водителем крутящий момент (например, с датчика 134 положения педали), температуру воздуха, скорость транспортного средства, и т.д.
Затем, на этапе 304 способа, определяется действующее давление наддува. Действующий наддув может измеряться непосредственно по датчику, такому как датчик 123. Измерение может отправляться в контроллер 12 посредством сигнала давления Наддува и сохраняться на машиночитаемом запоминающем носителе (например, ПЗУ 106, ОЗУ 108 и/или KAM 110 контроллера 12 на фиг. 1). В альтернативном варианте осуществления, действующее давление наддува может оцениваться на основании других рабочих параметров, таких как, например, на основании MAP и RPM.
Затем, на этапе 306 способа, определяется атмосферное давление. Например, атмосферное давление может измеряться по датчику MAP при запуске двигателя и/или оцениваться на основании условий работы двигателя, в том числе, MAF, MAP, положения дросселя, и т.д. Измерение может отправляться в контроллер двигателя и сохраняться на машиночитаемом запоминающем носителе. В альтернативном варианте осуществления, атмосферное давление может оцениваться на основании других рабочих параметров.
Затем, на этапе 308 способа, определяется разность между действующим и требуемым наддувом. Например, контроллер двигателя может определять разность. В некоторых примерах, разность может определяться вычитанием требуемого наддува из действующего наддува.
Затем, на этапе 310 способа, подъем клапана перепускной заслонки для выхлопных газов определяется, чтобы уменьшать разность между действующим и требуемым наддувом, определенную на этапе 308. В некоторых примерах, разность между действующим и требуемым наддувом, в дополнение к текущему подъему клапана перепускной заслонки для выхлопных газов (например, считываемому посредством датчика 224 положения), подается на пригодный механизм управления, выполненный с возможностью определять подъем клапана перепускной заслонки для выхлопных газов, чтобы уменьшать эту разность. Например, подъем клапана перепускной заслонки для выхлопных газов может использоваться в качестве входных данных в динамическую модель перепускной заслонки для выхлопных газов. В некоторых приводах перепускной заслонки для выхлопных газов, подъем клапана перепускной заслонки для выхлопных газов может отображаться в рабочий цикл перепускной заслонки для выхлопных газов, где сигнал рабочего цикла формируется контроллером и отправляется на привод перепускной заслонки для выхлопных газов. Отображение в рабочий цикл перепускной заслонки для выхлопных газов может включать в себя использование справочных таблиц или расчет рабочего цикла перепускной заслонки для выхлопных газов. В некоторых других приводах, регулятор перепускной заслонки для выхлопных газов определяет рабочий цикл на основании разности между требуемым и действующим положениями перепускной заслонки для выхлопных газов. Сигнал управления перепускной заслонкой для выхлопных газов (WGC) может включать в себя широтно-импульсную модуляцию посредством рабочего цикла для регулировки перепускной заслонки для выхлопных газов. Подъем клапана перепускной заслонки для выхлопных газов, например, может достигаться посредством алгоритмов управления с прямой связью, обратной связью и/или других алгоритмов управления.
Член компенсации может учитывать задержки привода перепускной заслонки для выхлопных газов. Дополнительно, член компенсации дополнительно может включать в себя регулировки, основанные на перемещении сдвоенных независимых кулачков, которые могут оказывать влияние на давление наддува. Например, по мере того, как впускной кулачок перемещается некоторым образом, который увеличивал бы давление наддува относительно атмосферного давления, величина члена компенсации может уменьшаться. Подобным образом, по мере того, как впускной кулачок перемещается некоторым образом, который уменьшал бы давление наддува относительно атмосферного давления, величина члена компенсации может увеличиваться.
Затем, на этапе 312 способа, требуемое положение привода определяется для достижения подъема клапана перепускной заслонки для выхлопных газов, определенного на этапе 310. Требуемое положение привода может подаваться в качестве входного сигнала на различные пригодные механизмы управления, в том числе, описанные выше. В некоторых вариантах осуществления, требуемая ориентация привода может определяться в качестве альтернативы, такая как угловая ориентация вращающегося компонента в приводе.
Затем, на этапе 314 способа, определяется требуемый ток привода для достижения требуемого подъема клапана перепускной заслонки для выхлопных газов. Требуемый ток привода может определяться на основании разности между мгновенным положением привода и требуемым положением привода, а также усилий выхлопных газов, действующих на клапан перепускной заслонки для выхлопных газов.
Затем, на этапе 316 способа, определяется температура привода. Определение температуры привода может включать в себя, на этапе 318, определение окружающей температуры, окружающей привод. Как описано выше, окружающая температура, окружающая привод, может определяться на основании выходного сигнала с датчика, выполненного с возможностью измерять такую температуру - например, выходной сигнал с датчика 226 температуры по фиг. 2 может быть одним из входных сигналов, используемых для определения окружающей температуры. Однако, могут применяться другие механизмы для определения окружающей температуры привода. В некоторых примерах, окружающая температура может оцениваться на основании одного или более рабочих параметров (например, температуры окружающей среды, скорости вращения двигателя, нагрузки двигателя, скорости транспортного средства, положения радиаторных заслонок, и т.д.). Окружающая температура может соответствовать области, в целом ближайшей к приводу (например, в положении 166 по фиг. 1), или области, ближайшей к и находящейся в непосредственной близости от привода (например, в положении 168 по фиг. 1).
Затем, на этапе 320 способа, максимально допустимый ток, который может подаваться в привод, определяется на основании температуры привода, определенной на этапе 316, и известных свойств привода. В частности, следующая зависимость, описанная выше, может использоваться для определения максимально допустимого тока: IMAX=sqrt((TMAX–TE)/(R*KT)), где TMAX может быть постоянным значением для данного привода. В некоторых примерах, максимально допустимая температура TMAX привода может быть установлена в относительно пониженное значение, чтобы обеспечивать буфер против ухудшения характеристик привода. В некоторых вариантах осуществления, если окружающая температура не может быть определена, температура наихудшего случая (например, максимальная температура под капотом) может использоваться в качестве TE в вышеприведенной зависимости.
Затем, на этапе 322 способа, определяется, превышает ли требуемый ток привода, определенный на этапе 314, максимально допустимый ток привода. Если требуемый ток привода превышает максимально допустимый ток (Да), способ переходит на этап 326. Если требуемый ток привода не превышает максимально допустимый ток (Нет), способ переходит на этап 334.
На этапе 324 способа, наддув ограничивается, чтобы избегать ухудшенной работы привода. Ограничение наддува может включать в себя, на этапе 325, установку наилучшего возможного положения привода посредством подачи не большего, чем максимально допустимый, тока в привод, если ток непрерывно прикладывался к приводу в течение большей, чем пороговая, продолжительности времени. Непрерывное прикладывание тока к приводу, например, может происходить во время условий, в которых требуется максимальный наддув. Пороговая продолжительность времени может быть установлена в различные пригодные значения, чтобы гарантировать защиту привода (например, одну секунду), не препятствуя работе привода, которая не угрожает ухудшением характеристик. Расположение привода в наилучшем возможном положении, в свою очередь, размещает клапан перепускной заслонки для выхлопных газов на наилучшем возможном подъеме. Например, требуемый уровень наддува (например, максимальный наддув) может быть недонабран посредством увеличения подъема клапана перепускной заслонки для выхлопных газов относительно подъема, который регулировался бы для достижения требуемого уровня наддува (например, нулевого подъема/полностью закрытого положения). Однако, величина, на которую увеличивается подъем клапана, величина, на которую понижается ток, подаваемый в привод, и соответственно, величина, на которую недонабирается требуемый наддув, являются минимальными значениями для избегания ухудшения характеристик привода. Другими словами, требуемый наддув недонабирается на минимальное значение, которое может минимизировать или, в некоторых случаях, делать незаметным неблагоприятное влияние на рабочие характеристики транспортного средства, воспринимаемые водителем транспортного средства. В некоторых примерах, величина, на которую увеличивается подъем клапана, и уменьшается ток, может определяться пропорционально величине, на которую требуемый ток привода превышает максимально допустимый ток.
Затем, на этапе 326 способа, по выбору определяется температура обмотки привода. Этапы 326 и 328 способа в целом представляют подход для защиты привода, в котором температура обмотки используется для ограничения тока и, в частности, величины, на которую ограничивается ток.
Далее, с обращением к фиг. 4, показана блок-схема последовательности операций способа, иллюстрирующая способ 400 для определения температуры привода 202 перепускной заслонки для выхлопных газов по фиг. 2 на основании сопротивления обмотки. Способ 400, например, может выполняться контроллером 12 двигателя по фиг. 1.
На этапе 401 способа, определяется, пригодны ли условия работы для выборки отсчетов сопротивлений обмотки привода перепускной заслонки для выхлопных газов. Пригодные условия могут включать в себя клапан перепускной заслонки для выхлопных газов, приближающийся к полностью закрытому положению (например, приближающийся к седлу 220 клапана по фиг. 2). Будет отмечено, что сценарии, в которых клапан не приближается к полностью закрытому положению, могут включать в себя те, в которых клапан движется дальше от полностью закрытого положения (например, в направлении полностью открытого положения), или те, в которых клапан движется в направлении полностью закрытого положения, но не будет достигать полностью закрытого положения (например, требуемый подъем клапана перепускной заслонки для выхлопных газов, на котором клапан должен быть установлен, не соответствует полностью закрытому положению).
В некоторых примерах, пригодные условия также могут ставить условием, чтобы скорость приближения к полностью закрытому положению была меньшей, чем пороговое значение. Скорость клапана ниже порогового значения может давать благоприятную возможность для определения сопротивления обмотки в многочисленных положениях ротора согласно способу 400, так как, в некоторых примерах, сопротивление привода может соответствовать следующей зависимости: R=(1/I)(V–L*(di/dt)+K*s), где R - сопротивление обмотки, I - электрический ток, подаваемый в привод, V - напряжение на приводе, L - индуктивность привода, t - время, K - постоянная, а s - скорость клапана. Таким образом, на скоростях клапана ниже порогового значения, заключительный член (K*s) вышеуказанной зависимости может становиться ничтожным. В таких условиях, электрический ток может быть близок к установившемуся состоянию и, таким образом, (dI/dt) может становиться ничтожным, создавая зависимость R=V/I. Соответственно, сопротивление обмотки может определяться, если V и I могут быть измерены или определены. В некоторых вариантах осуществления, это упрощение оценки сопротивления обмотки может применяться в сценариях, где клапан не приближается к полностью закрытому положению. В других примерах, однако, сопротивление обмотки может определяться на скоростях клапана выше порогового значения посредством оценивания (L*(dI/dt)) и (K*s), если известны постоянная K и индуктивность L.
Пригодные условия дополнительно могут включать в себя положение клапана перепускной заслонки для выхлопных газов, соответствующее установившемуся состоянию - например, являющееся неизменным положение клапана. Положение клапана может находиться в полностью закрытом положении, полностью открытом положении или на любом частичном подъеме между ними.
Если, на этапе 401 способа, определено, что условия работы пригодны для выборки отсчетов сопротивления обмотки (Да), способ переходит на этап 402. Если определено, что условия работы не пригодны для выборки отсчетов сопротивления обмотки (Нет), способ переходит на этап 330 способа 300 по фиг. 3.
На этапе 402 способа, положение ротора (например, угловая ориентация) привода перепускной заслонки для выхлопных газов меняется. В некоторых примерах, контроллер двигателя может выдавать измененное положение привода на привод перепускной заслонки для выхлопных газов, чтобы, тем самым, изменять положение ротора. Как дополнительно описано ниже, положение ротора может регулироваться в пределах различных пригодных величин (например, углов).
Затем, на этапе 403 способа, где впускной дроссель по выбору может регулироваться для компенсации изменения уровней наддува, вызванных отклонением от требуемого положения перепускной заслонки для выхлопных газов в измененное положение перепускной заслонки для выхлопных газов. Например, может отклоняться впускной дроссель 21 и/или 23 по фиг. 1. В некоторых сценариях, регулировка впускного дросселя может включать в себя увеличение открывания дросселя, если измененной положение перепускной заслонки для выхлопных газов увеличивает открывание клапана перепускной заслонки для выхлопных газов, и наоборот.
Затем, на этапе 404 способа, определяется сопротивление обмотки привода перепускной заслонки для выхлопных газов. Как описано выше, в некоторых примерах, сопротивление обмотки может определяться посредством измерения напряжения и тока, подаваемых на привод, и деления напряжения на ток. В других сценариях, в которых скорость клапана перепускной заслонки для выхлопных газов находится выше порогового значения, сопротивление обмотки может определяться согласно зависимости, описанной выше (R=(1/I)(V–L*(dI/dt)+K*s)).
Затем, на этапе 406 способа, определенное сопротивление обмотки сохраняется и ассоциативно связывается с мгновенным положением привода. Сопротивление обмотки и положение привода могут сохраняться в различных пригодных структурах данных, в том числе, но не в качестве ограничения, справочной таблице.
Затем, на этапе 408 способа, определяется, было ли определено достаточное количество сопротивлений обмотки. Здесь, структура данных, в которой сохраняются определенные сопротивления обмотки, может подвергаться доступу для определения количества сопротивлений обмотки, определенных до сих пор. Различные пригодные количества могут быть выбраны в качестве минимального количества сопротивлений обмотки для обеспечения соответствующего требованиям определения характеристик сопротивления обмотки привода. В качестве альтернативы или дополнительно, может быть задан минимальный диапазон угла поворота, на протяжении которого должны определяться сопротивления обмотки. В некоторых примерах, к структурам данных может осуществляться доступ для определения углового диапазона ротора, перекрываемого определенными сопротивлениями обмотки. В некоторых вариантах осуществления, сопротивления обмотки могут собираться на всем протяжении всего углового диапазона ротора (например, полного оборота, перекрывающего 360°, пол-оборота, перекрывающего 180°). Таким образом, положение ротора может меняться на этапе 402 некоторое количество раз и, как описано выше, на надлежащую величину шага (например, угол). Величина шага и количество отсчетов выборки, например, могут выбираться согласно условиям работы и ожидаемой продолжительности времени, в течение которой могут сохраняться условия, пригодные для сопротивления обмотки. Соответственно, если определено, что количества определенных сопротивлений обмотки не достаточно (Нет), способ возвращается на этап 402. Если определено, что количества сопротивлений обмотки достаточно (Да), способ переходит на этап 410.
На этапе 410 способа, температура привода оценивается на основании определенных сопротивлений обмотки. Оценка температуры может включать в себя усреднение определенных сопротивлений обмотки пригодным образом для формирования усредненного сопротивления обмотки. Усредненное сопротивление обмотки затем может использоваться для определения температуры обмотки на основании известных свойств материала(ов) обмотки. Например, справочная таблица, имеющая множество сопротивлений обмотки, каждое связано с температурой обмотки, может подвергаться доступу.
Возвращаясь на фиг. 3B, на этапе 328 способа, имея успешно определенную температуру обмотки привода на этапе 326, ток, подаваемый в привод, по выбору ограничивается на основании разности между температурой обмотки, определенной на этапе 326, и максимально допустимой температурой обмотки. В некоторых примерах, степень, с которой ограничивается ток, может быть пропорциональна разности между температурой обмотки и максимально допустимой температурой обмотки.
Затем, на этапе 330 способа, топливо, подаваемое в двигатель (например, двигатель 10 по фиг. 1), связанный с перепускной заслонкой для выхлопных газов, может ограничиваться. Степень, с которой ограничивается подача топлива, может быть пропорциональна степени, с которой ограничивается наддув, и, в частности, уменьшению подачи воздуха в двигатель. Таким образом, может поддерживаться оптимальная (например, стехиометрическая) работа двигателя.
Затем, на этапе 332 способа, может сообщаться ограничение наддува на этапе 324 или 328. Сообщение об ограниченном наддуве, например, может включать в себя предупреждение водителя транспортного средства через индикатор приборной панели и дополнительно может включать в себя регистрацию события в контроллере двигателя. После этапа 332, способ заканчивается.
На этапе 334, если определено, на этапе 322, что требуемый ток привода не превышает максимально допустимый ток, требуемый ток прикладывается к приводу, чтобы добиться требуемого положения привода. Пригодный механизм преобразования напряжения в ток может преобразовывать напряжение, сформированное контроллером привода, для формирования тока.
Затем, на этапе 336 способа, определяется, находится ли положение привода в требуемом положении привода. Здесь, считываемое положение привода может сравниваться с требуемым положением привода. В некоторых вариантах осуществления, разности между положением привода и требуемым положением привода ниже порогового значения могут игнорироваться. Если положение привода не находится в требуемом положении привода (Нет), способ возвращается на этап 314. Если положение привода находится в требуемом положении привода (Да), способ переходит на этап 338.
На этапе 338 способа, ток, приложенный к приводу, регулируется для поддержания требуемого подъема клапана и управления положением привода. Требуемый подъем клапана может поддерживаться посредством алгоритмов управления с обратной связью и/или прямой связью. Например, подъем клапана может регулироваться посредством вспомогательного контура регулирования. Таким образом, приложенный ток регулируется, когда исправленное положение привода достигает положения, соответствующего требуемому положению клапана. После этапа 338, способ заканчивается.
Некоторые условия могут побуждать использовать одну из окружающей температуры и температуры обмотки, но не другую, для определения максимально допустимого тока. Например, температура обмотки, а не окружающая температура, может использоваться, если окружающая температуры оставалась по существу постоянной (например, изменялась на 5% или меньше) в течение по меньшей мере пороговой продолжительности времени, но по меньшей мере пороговая величина прикладывалась к приводу на всем протяжении этой продолжительности времени. В этом случае, несмотря на то, что окружающая температура может оставаться приблизительно неизменной, значительное прикладывание тока к приводу может оказывать влияние на его температуру, которое может не указывать единственное измерение окружающей температуры. Измерение температуры обмотки, однако, может отражать это изменение. В других сценариях, окружающая температура, а не температура обмотки, может использоваться, если условия работы не пригодны для определения температуры обмотки, как определено на этапе 401 способа 400. Подобным образом, температура обмотки может избегаться, если достаточное количество отсчетов выборки сопротивления обмотки не было получено, как определено на этапе 408 способа 400.
Таким образом, как показано и описано, способы 300 и 400 могут применяться, чтобы уменьшать потенциальную возможность для ухудшенной работы привода перепускной заслонки для выхлопных газов и ухудшенного управления наддувом вследствие чрезмерной температуры привода посредством наряду с минимизацией степени снижения наддува и избежания ухудшенной работы, если температура привода превышает максимально допустимую температуру. Кроме того, следует принимать во внимание, что способы 300 и 400 могут применяться многократно на всем протяжении работы.
В еще одном представлении, способ работы перепускной заслонки для выхлопных газов (например, перепускной заслонки 200 для выхлопных газов по фиг. 2) может содержать оценивание тока электродвигателя, чтобы выдавать требуемый уровень наддува, и ограничение величины наддува в ответ на предельное значение тока, основанное на температуре привода перепускной заслонки для выхлопных газов (например, привода 202 по фиг. 2). Предельное значение тока может быть основано на температуре окружающей среды, и способ дополнительно может содержать ограничение количества топлива, подаваемого в двигатель (например, двигатель 10 по фиг. 1) в ответ на ограниченную величину наддува.
Далее, с обращением к фиг. 5, показан график 500, иллюстрирующий ток привода и ограничение наддува согласно способу 300 по фиг. 3 для примерного ездового цикла. График 500 включает в себя график 502 тока, подаваемого в привод перепускной заслонки для выхлопных газов (например, привод 202 по фиг. 2), который покрывает диапазон токов от минимального тока (например, нулевого подаваемого тока, такого как во время условий, в которых не требуется наддув) до максимального тока (например, во время условий, в которых требуется максимальный наддув). График 500 также показывает график 504 наддува, получающегося в результате изменения расположения клапана перепускной заслонки для выхлопных газов (например, клапана 218 по фиг. 2), приводимого в действие приводом перепускной заслонки для выхлопных газов согласно току, подаваемому в него.
Как показано, в пределах первой продолжительности времени t1, запрашивается максимальный наддув, в дополнение к уровням наддува, близким к максимуму, предшествующим и сопровождающим запрос максимального наддува. Во время t1, определяется первый максимально допустимый ток 506, который может подаваться в привод, представленный пунктирными линиями. Первый максимально допустимый ток 506 определяется на основании максимально допустимой температуры привода описанным выше образом. Требуемый уровни тока для достижения запрошенных уровней наддува на всем протяжении продолжительности времени t1, однако, превышает первый максимально допустимый ток 506. По существу, ток, подаваемый в привод, ограничивается первым максимально допустимым током 506 (подаваемый ток показывается слегка ниже первого максимально допустимого тока для разборчивости на фиг. 4). Уровни тока, которые превышают первый максимально допустимый ток 506, и которые иначе подавались бы в привод, показаны тонкими пунктирными линиями на фиг. 5. Соответствующее уменьшение наддува также показано на графике 504, а также наддув, который формировался бы иначе, тонкими пунктирными линиями без уменьшения подаваемого тока.
Подобным образом, в пределах второй продолжительности времени t2, максимальный наддув и, подобным образом, высокие уровни наддува, запрашиваются еще раз. Второй максимально допустимый ток 508 определяется описанным выше образом. Однако, второй максимально допустимый ток 508 меньше, чем первый максимально допустимый ток 506, например, вследствие повышения окружающих температур, окружающих перепускную заслонку для выхлопных газов, больший результирующий ток, который подавался в привод во время t2, относительно t1. По существу, ток, подаваемый в привод, ограничивается вторым максимально допустимым током 506 (подаваемый ток показывается слегка ниже второго максимально допустимого тока для разборчивости на фиг. 4). Уровни тока, которые превышают второй максимально допустимый ток 508, и которые иначе подавались бы в привод, показаны тонкими пунктирными линиями на фиг. 5. Соответствующее уменьшение наддува также показано на графике 504, а также наддув, который формировался бы иначе, тонкими пунктирными линиями без уменьшения подаваемого тока. Как описано выше, различные действия могут предприниматься в течение длительностей, в которых наддув ограничивается вследствие ограничения тока, такие как ограничение топлива, подаваемого в связанный двигатель.
Следует принимать во внимание, что график 500 предоставлен ради понимания и не подразумевается ограничивающим никоим образом. Например, формы графиков 502 и 504, временное запаздывание между ними, значения первого и второго максимально допустимых токов 506 и 508, и степень, с которой ограничиваются подаваемые ток и наддув, являются всего лишь иллюстративными и могут быть преувеличены относительно реальной работы перепускной заслонки для выхлопных газов/транспортного средства.
Следует отметить, что примерные процедуры управления и оценки, включенные в материалы настоящего описания, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Способы и процедуры управления, раскрытые в материалах настоящего описания, могут храниться в качестве исполняемых команд в постоянной памяти. Специфичные процедуры, описанные в материалах настоящего описания, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящего описания, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машиночитаемого запоминающего носителя в системе управления двигателем.
Следует принимать во внимание, что конфигурации и процедуры, раскрытые в материалах настоящего описания, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящего описания.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Следует понимать, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.


Изобретение может быть использовано в двигателях внутреннего сгорания с наддувом. Способ работы перепускной заслонки (26) для выхлопных газов заключается в том, что определяют предельное значение электрического тока привода (150) перепускной заслонки (26) для выхлопных газов и ограничивают величину наддува в ответ на предельное значение электрического тока и на основании условий окружающей среды посредством контроллера (12). Ограничение величины наддува включает в себя этап, на котором устанавливают привод (150) перепускной заслонки (26) для выхлопных газов в положении посредством подачи самое большее электрического тока, равного предельному значению электрического тока, на привод (150) перепускной заслонки (26) для выхлопных газов. Предельное значение электрического тока определяют на основании температуры привода (150) перепускной заслонки (26) для выхлопных газов, определяемой на основании условий окружающей среды, включающих в себя температуру окружающей среды, ближайшей к приводу перепускной заслонки для выхлопных газов. Раскрыты вариант способа работы перепускной заслонки для выхлопных газов и способ работы электрического привода перепускной заслонки для выхлопных газов. Технический результат заключается в повышении точности оценивания температуры электродвигателя привода перепускной заслонки. 3 н. и 13 з.п. ф-лы, 6 ил.
1. Способ работы перепускной заслонки для выхлопных газов, включающий в себя этапы, на которых:
определяют предельное значение электрического тока привода перепускной заслонки для выхлопных газов и ограничивают величину наддува в ответ на предельное значение электрического тока и на основании условий окружающей среды посредством контроллера,
причем ограничение величины наддува включает в себя этап, на котором устанавливают привод перепускной заслонки для выхлопных газов в положении посредством подачи самое большее электрического тока, равного предельному значению электрического тока, на привод перепускной заслонки для выхлопных газов,
при этом предельное значение электрического тока определяют на основании температуры привода перепускной заслонки для выхлопных газов, определяемой на основании условий окружающей среды, включающих в себя температуру окружающей среды, ближайшей к приводу перепускной заслонки для выхлопных газов.
2. Способ по п. 1, в котором температуру окружающей среды оценивают на основании множества условий работы двигателя, скорости транспортного средства и положения радиаторных заслонок.
3. Способ по п. 1, дополнительно включающий в себя этап, на котором ограничивают количество топлива, подаваемое в двигатель, пропорционально степени, с которой ограничивается наддув.
4. Способ работы перепускной заслонки для выхлопных газов, включающий в себя этапы, на которых:
изменяют электрический ток, подаваемый в привод перепускной заслонки для выхлопных газов, в ответ на требуемый наддув и текущий наддув;
определяют максимально допустимый электрический ток на основании температуры привода, и
уменьшают мгновенный электрический ток, подаваемый в привод в ответ на мгновенный электрический ток, превышающий максимально допустимый электрический ток, посредством контроллера,
причем температуру привода определяют на основании температуры среды, окружающей привод,
при этом электрический ток, подаваемый в привод, управляет положением привода.
5. Способ по п. 4, в котором уменьшение мгновенного электрического тока включает в себя этап, на котором уменьшают мгновенный электрический ток до максимально допустимого электрического тока.
6. Способ по п. 4, в котором мгновенный электрический ток непрерывно подают в привод в течение по меньшей мере пороговой продолжительности времени.
7. Способ по п. 4, в котором температуру привода дополнительно определяют на основании температуры обмотки привода.
8. Способ по п. 7, в котором температура обмотки основана на двух или более измерениях сопротивления обмотки привода, подвергнутых выборке отсчетов на всем протяжении по меньшей мере половины полного оборота ротора привода.
9. Способ по п. 4, дополнительно включающий в себя этап, на котором ограничивают наддув, подаваемый в двигатель, понижением мгновенного электрического тока, подаваемого в привод.
10. Способ по п. 9, дополнительно включающий в себя этап, на котором сообщают об ограничении наддува посредством установки диагностического кода.
11. Способ по п. 4, дополнительно включающий в себя этап, на котором устанавливают и поддерживают привод в положении подачей не большего, чем максимально допустимый, электрического тока в привод.
12. Способ по п. 4, дополнительно включающий в себя этап, на котором ограничивают топливо, подаваемое в двигатель.
13. Способ работы электрического привода перепускной заслонки для выхлопных газов, включающий в себя этапы, на которых:
определяют максимально допустимый ток обмотки на основании температуры привода;
определяют то, что требуемый ток привода, основанный на требуемом наддуве и текущем наддуве, превышает максимально допустимый ток обмотки, и
посредством контроллера подают в привод ток меньший, чем требуемый ток привода,
причем температуру привода определяют на основании температуры окружающей среды, окружающей привод, и
ток, подаваемый в привод, управляет положением привода.
14. Способ по п. 13, в котором подача тока меньшего, чем требуемый ток привода, в привод включает в себя этап, на котором подают максимально допустимый ток обмотки.
15. Способ по п. 13, в котором температуру привода дополнительно определяют на основании температуры обмотки привода.
16. Способ по п. 15, в котором температуру обмотки определяют на основании многочисленных измерений сопротивления обмотки на всем протяжении минимального диапазона поворота ротора привода в выбранных условиях наддува.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СИСТЕМА ТУРБОНАДДУВА ТЕПЛОВОЗНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2449139C1 |

