ОБЛАСТЬ ТЕХНИКИ
Раскрытие относится к управлению перепускной заслонкой для отработавших газов в турбонагнетателе.
УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Некоторые двигатели внутреннего сгорания используют компрессионное устройство, такое как турбонагнетатель, для повышения удельной выходной мощности/крутящего момента двигателя. В одном из примеров, турбонагнетатель может включать в себя компрессор и турбину, соединенные приводным валом, где турбина присоединена к стороне выпускного коллектора, а компрессор присоединен к стороне впускного коллектора двигателя. Таким образом, турбина с приводом от выхлопной системы подает энергию на компрессор, чтобы повышать давление (например, наддув или давление наддува) во впускном коллекторе и усиливать поток воздуха в двигатель. Наддув может регулироваться посредством настройки количества газа, попадающего в турбину, например, с помощью перепускной заслонки для отработавших газов. Привод может быть функционально присоединен через рычажный механизм к клапану перепускной заслонки для отработавших газов и приводиться в движение, чтобы позиционировать клапан перепускной заслонки для отработавших газов для достижения требуемого наддува, основанного на условиях эксплуатации. Привод может быть электроприводом, например, таким как электродвигатель с редуктором скорости. Датчик положения может давать обратную связь, показывающую положение клапана перепускной заслонки для отработавших газов относительно седла клапана. В зависимости от его положения, рычажный механизм может подвергаться значительно большим усилиям, вибрации и температурам.
В некоторых подходах, клапан перепускной заслонки для отработавших газов расположен в корпусе турбины с рычагом перепускной заслонки отработавших газов, продолжающимся за пределами корпуса, для управления перепускной заслонкой для отработавших газов. Привод может быть установлен на некотором расстоянии от корпуса турбины, для того чтобы избегать перегрева привода. Рычажный механизм присоединяет привод к рычагу перепускной заслонки для отработавших газов.
Изобретатели в материалах настоящей заявки осознали проблему у таких подходов. В частности, рычажные механизмы могут прогибаться (например, изгибаться), когда подвергаются относительно высоким усилиям (например, усилиям привода и/или отработавших газов). Прогиб рычажного механизма может давать в результате неточное позиционирование клапана перепускной заслонки для отработавших газов и, таким образом, неточное управление наддувом.
Предусмотрены способы для компенсации прогнутого рычажного механизма в компоновке перепускной заслонки для отработавших газов.
В одном из примеров, ток подается в привод для перемещения клапана перепускной заслонки для отработавших газов, присоединенного через рычажный механизм к приводу, для отвода газов от турбонагнетателя. Показывается положение привода, и применяется поправка в отношении упомянутого показанного положения привода, компенсирующая прогиб рычажного механизма, на основании по меньшей мере приложенного тока. Приложенный ток настраивается, когда исправленное положение привода достигает положения, соответствующего требуемому положению клапана.
В более конкретном примере, поправка на прогиб рычажного механизма извлекается из хранимой базы данных, созданной во время предыдущих испытательных циклов, и на основании приложенного тока и температуры рычажного механизма.
В еще одном аспекте примера, поправка создавалась с использованием испытательной процедуры, содержащей: повышение приложенного тока для перемещения клапана в полностью закрытое положение; после того, как клапан удерживается в закрытом положении, дополнительное повышение приложенного тока, чтобы вызвать прогиб рычажного механизма, при этом, изменение показанного положения привода во время этапа повышения приложенного тока сохраняется в качестве поправки на прогиб.
В кроме того еще одном примере, поправка создавалась с использованием испытательной процедуры, содержащей: определение полностью закрытого положения клапана; когда клапан находится по существу в открытом положении, выдачу командного тока закрывания на привод; логический вывод положения привода на основании командного тока закрывания и определенного полностью закрытого положения; и создание поправки положения на основании разности между логически выведенным положением привода и показанным положением привода.
В примерах, описанных выше, прогиб рычажного механизма, который, в ином случае, приводил бы к неточному позиционированию клапана перепускной заслонки для отработавших газов, компенсируется. Токи, прикладываемые к приводу, могут регулироваться, чтобы перемещать привод в исправленное положение на основании определенных поправок положения. Таким образом, технический результат достигается этими действиями.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания, когда воспринимается в одиночку или в связи с прилагаемыми чертежами.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
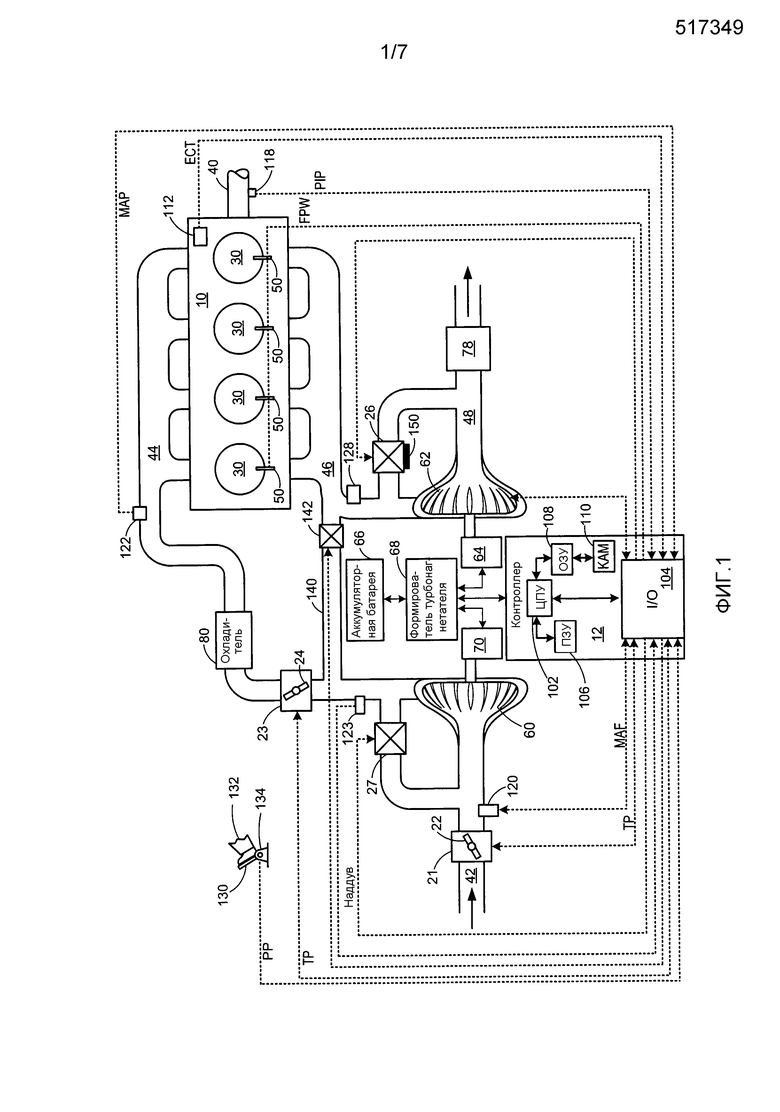
Фиг. 1 показывает структурную схему двигателя с турбонаддувом, включающего в себя перепускную заслонку для отработавших газов.
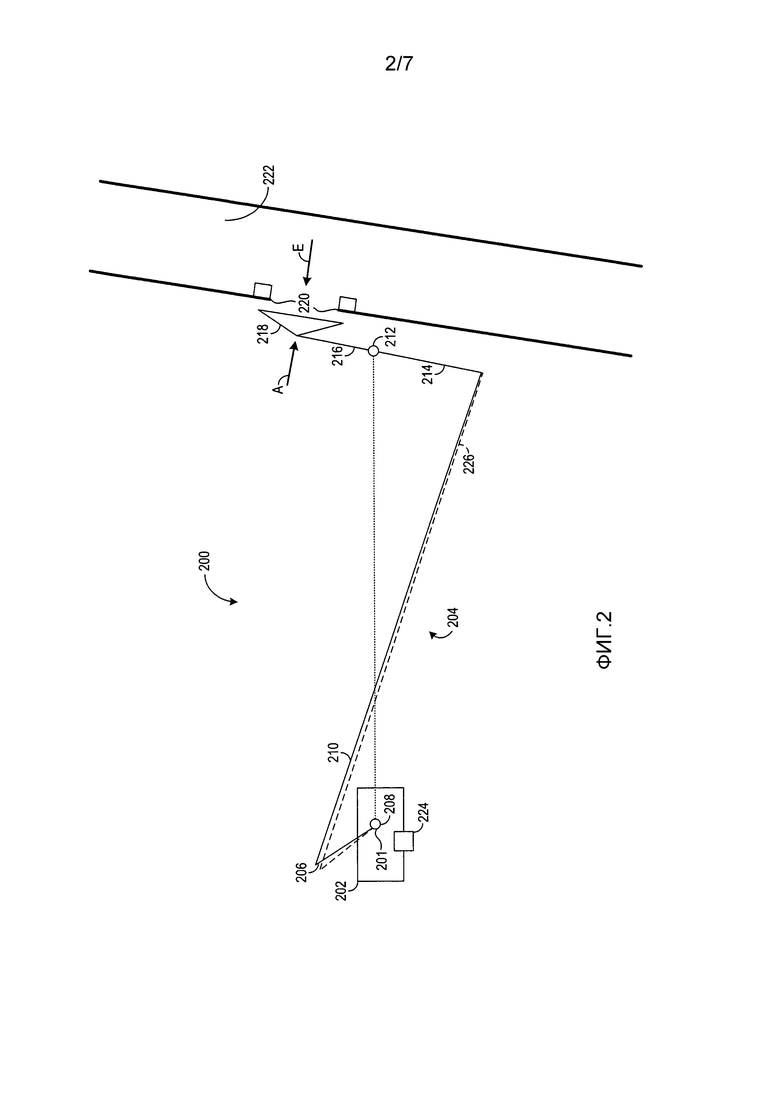
Фиг. 2 показывает примерную компоновку перепускной заслонки для отработавших газов по фиг. 1.
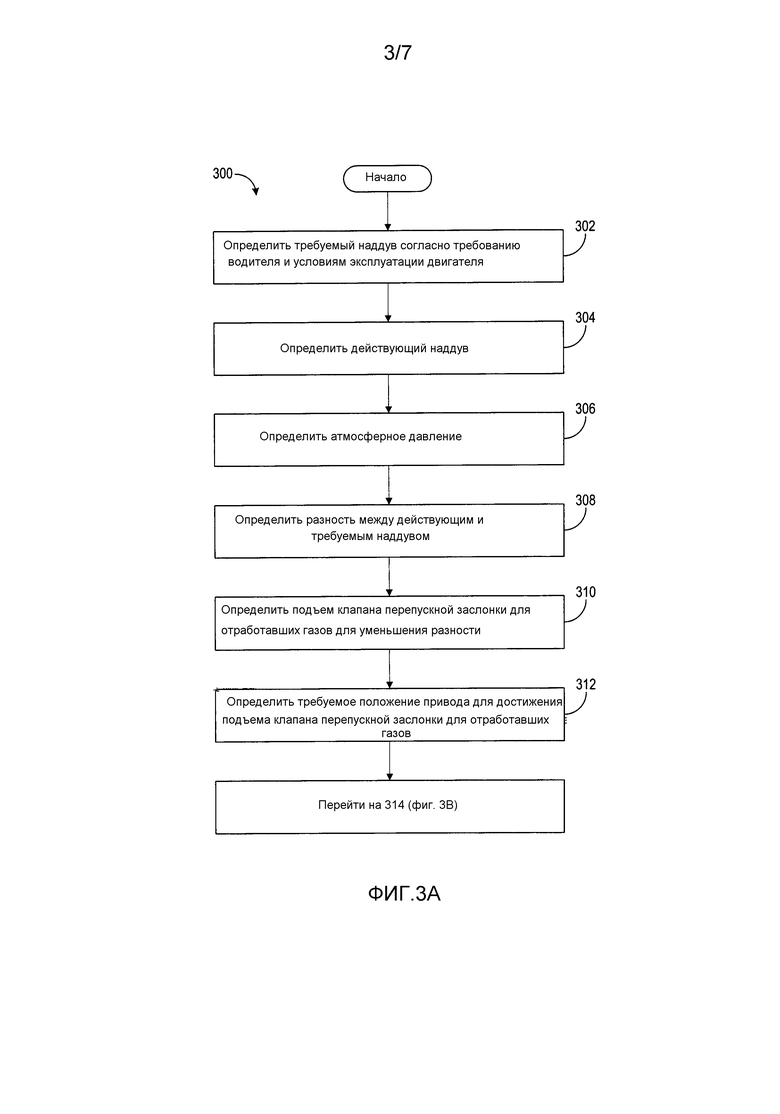
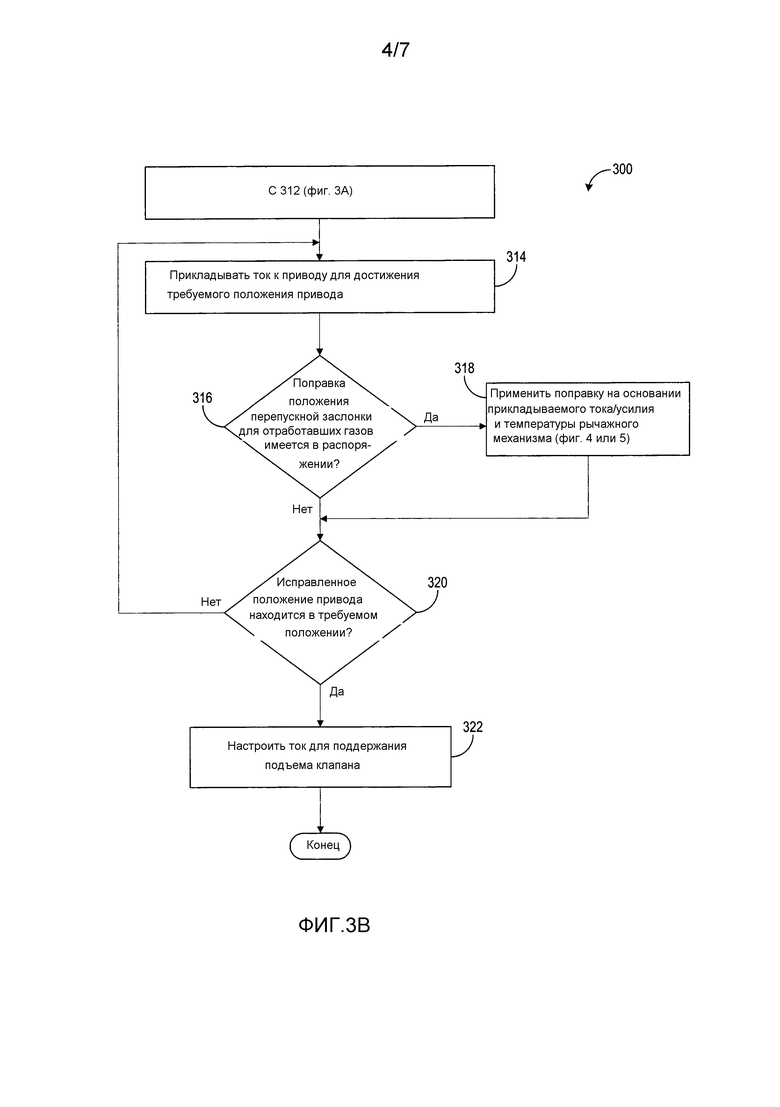
Фиг. 3A и 3B показывают блок-схему последовательности операций способа, иллюстрирующую способ для управления турбонагнетателем, ассоциативно связанным с компоновкой перепускной заслонки для отработавших газов по фиг. 2.
Фиг. 4A и 4B показывают блок-схему последовательности операций способа, иллюстрирующую способ для компенсации прогнутого рычажного механизма в компоновке перепускной заслонки для отработавших газов по фиг. 2.
Фиг. 5 показывает блок-схему последовательности операций способа, иллюстрирующую еще один способ для компенсации прогнутого рычажного механизма в компоновке перепускной заслонки для отработавших газов по фиг. 2.
ПОДРОБНОЕ ОПИСАНИЕ
Компрессионные устройства, такие как турбонагнетатель, могут использоваться для повышения выходной мощности двигателя внутреннего сгорания. Перепускная заслонка для отработавших газов частично регулирует давление наддува, подаваемое в двигатель посредством позиционирования клапана перепускной заслонки для отработавших газов, чтобы, тем самым, регулировать количество отработавших газов, достигающих турбины турбонагнетателя. Клапан перепускной заслонки для отработавших газов может позиционироваться с помощью привода с рычажным механизмом, расположенным между ними. Деформация и/или прогиб рычажного механизма, однако, может мешать точному позиционированию клапана перепускной заслонки для отработавших газов и, таким образом, точному регулированию наддува. Например, усилия привода и усилия отработавших газов, действующие на рычажный механизм, могут заставлять рычажный механизм сгибаться. В других сценариях, прогиб может происходить в самом приводе и/или в конструкции, расположенной между клапаном перепускной заслонки для отработавших газов и монтажными приливами для привода. «Прогиб» и «деформация», в качестве используемых в материалах настоящей заявки, могут указывать ссылкой на любой или все из этих сценариев. Компенсация прогиба перепускной заслонки для отработавших газов, в некоторых примерах, может включать в себя компенсацию двух или более составляющих прогибов.
Предусмотрены различные способы для компенсации прогнутой рычажной передачи в компоновке перепускной заслонки для отработавших газов. В одном из примеров, ток подается в привод для перемещения клапана перепускной заслонки для отработавших газов, присоединенного через рычажный механизм к приводу, для отвода газов от турбонагнетателя. Показывается положение привода, и применяется поправка в отношении показанного положения привода, компенсирующая прогиб рычажного механизма, на основании по меньшей мере приложенного тока. Приложенный ток настраивается, когда исправленное положение привода достигает положения, соответствующего требуемому положению клапана. Фиг. 1 показывает структурную схему двигателя с турбонаддувом, включающего в себя перепускную заслонку для отработавших газов, фиг. 2 показывает примерную компоновку перепускной заслонки для отработавших газов по фиг. 1, фиг. 3A и 3B показывают блок-схему последовательности операций способа, иллюстрирующую способ для управления турбонагнетателем, ассоциативно связанным с компоновкой перепускной заслонки для отработавших газов по фиг. 2, фиг. 4A и 4B показывают блок-схему последовательности операций способа, иллюстрирующую способ для компенсации прогнутого рычажного механизма в компоновке перепускной заслонки для отработавших газов по фиг. 2, и фиг. 5 показывает блок-схему последовательности операций способа, иллюстрирующую еще один способ для компенсации прогнутого рычажного механизма в компоновке перепускной заслонки для отработавших газов по фиг. 2. Двигатель по фиг. 1 также включает в себя контроллер, выполненный с возможностью выполнять способы, изображенные на фиг. 3-5.
Фиг. 1 - принципиальная схема, показывающая примерный двигатель 10, который может быть включен в силовую установку автомобиля. Двигатель 10 показан с четырьмя цилиндрами 30. Однако, другие количества цилиндров могут использоваться в соответствии с данным раскрытием. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Каждая камера 30 сгорания (например, цилиндр) двигателя 10 может включать в себя стенки камеры сгорания с поршнем (не показан), расположенными в них. Поршни могут быть присоединены к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии (не показана). Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10.
Камеры 30 сгорания могут принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42 и могут выпускать отработавшие газы через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут избирательно сообщаться с камерой 30 сгорания через соответственные впускные клапаны и выпускные клапаны (не показаны). В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Топливные форсунки 50 показаны присоединенными непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12. Таким образом, топливная форсунка 50 обеспечивает то, что известно в качестве непосредственного впрыска топлива в камеру 30 сгорания. Топливная форсунка, например, может быть установлена сбоку камеры сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 50 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива. В некоторых вариантах осуществления, камеры 30 сгорания, в качестве альтернативы или дополнительно, могут включать в себя топливную форсунку, скомпонованную во впускном коллекторе 44, в конфигурации, которая предусматривает то, что известно как оконный впрыск топлива во впускное окно выше по потоку от каждой камеры 30 сгорания.
Впускной канал 42 может включать в себя дроссель 21 и 23, имеющий дроссельные заслонки 22 и 24, соответственно. В этом конкретном примере, положение дроссельных заслонок 22 и 24 может регулироваться контроллером 12 посредством сигналов, выдаваемых на привод, включенный в состав дросселями 21 и 23. В одном из примеров, приводы могут быть электроприводами (например, электродвигателями), конфигурацией, которая обычно указывается ссылкой как электронный регулятор дросселя (ETC). Таким образом, заслонки 21 и 23 могут приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, между другими цилиндрами двигателя. Положение дроссельных заслонок 22 и 24 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канал 42 дополнительно может включать в себя датчик 120 массового расхода воздуха, датчик 122 давления воздуха в коллекторе и датчик 123 давления на входе дросселя для выдачи соответственных сигналов MAF (массового расхода воздуха), MAP (давления воздуха в коллекторе) в контроллер 12.
Выпускной канал 48 может принимать отработавшие газы из цилиндров 30. Датчик 128 отработавших газов показан присоединенным к выпускному каналу 48 выше по потоку от турбины 62 и устройства 78 снижения токсичности выбросов. Датчик 128 может быть выбран из числа различных пригодных датчиков для выдачи показания топливо/воздушного соотношения в отработавших газах, например, таких как линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный кислородный датчик или EGO, датчик NOx, HC, или CO. Устройство 78 снижения токсичности выбросов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности выбросов или их комбинациями.
Температура отработавших газов может измеряться одним или более датчиков температуры (не показаны), расположенных в выпускном канале 48. В качестве альтернативы, температура отработавших газов может логически выводиться на основании условий эксплуатации двигателя, таких как число оборотов, нагрузка, топливо-воздушное соотношение (AFR), запаздывание искрового зажигания, и т.д.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, дежурную память 110 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение всасываемого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ECT) с датчика 112 температуры, схематически показанного в одном месте в пределах двигателя 10; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя, как обсуждено; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122, как обсуждено. Сигнал числа оборотов двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе 44. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время стехиометрической работы, датчик MAP может давать показание крутящего момента двигателя. Кроме того, этот датчик, наряду с выявленным числом оборотов двигателя, может давать оценку заряда (включающего в себя воздух), введенного в цилиндр. В одном из примеров, датчик 118, который также используется в качестве датчика числа оборотов двигателя, может вырабатывать предопределенное количество равноразнесенных импульсов каждый оборот коленчатого вала 40. В некоторых примерах, постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
Двигатель 10 дополнительно может включать в себя компрессионное устройство, такое как турбонагнетатель или нагнетатель, включающий в себя по меньшей мере компрессор 60, скомпонованный вдоль впускного коллектора 44. Что касается турбонагнетателя, компрессор 60 может по меньшей мере частично приводиться в действие турбиной 62, например, через вал или другое соединительное устройство. Турбина 62 может быть скомпонована вдоль выпускного канала 48 и сообщаться с отработавшими газами, текущими через него. Различные компоновки могут быть предусмотрены для осуществления привода компрессора. Что касается нагнетателя, компрессор 60 может по меньшей мере частично приводиться в движение двигателем и/или электрической машиной и может не включать в себя турбину. Таким образом, величина сжатия, обеспечиваемого для одного или более цилиндров двигателя с помощью турбонагнетателя или нагнетателя, может регулироваться контроллером 12. В некоторых случаях, турбина 62, например, может приводить в движение электрогенератор 64 для выдачи энергии в аккумуляторную батарею 66 через приводной механизм 68 турбонагнетателя. Энергия из аккумуляторной батареи 66 затем может использоваться для приведения в движение компрессора 60 с помощью электродвигателя 70. Кроме того, датчик 123 может быть размещен во впускном коллекторе 44 для выдачи сигнала BOOST (НАДДУВ) в контроллер 12.
Кроме того, выпускной канал 48 может включать в себя перепускную заслонку 26 для отработавших газов для отвода отработавших газов от турбины 62. В некоторых вариантах осуществления, перепускная заслонка 26 для отработавших газов может быть многоступенной перепускной заслонкой для отработавших газов, таким как двухступенная перепускная заслонка для отработавших газов с первой ступенью, выполненной с возможностью регулировать давление наддува, и второй ступенью, выполненной с возможностью увеличивать тепловой поток в устройство 78 снижения токсичности выбросов. Перепускная заслонка 26 для отработавших газов может приводиться в действие с помощью привода 150, который, например, может быть электрическим приводом или пневматическим приводом. Впускной канал 42 может включать в себя перепускной клапан 27 компрессора, выполненный с возможностью отводить всасываемый воздух вокруг компрессора 60. Перепускная заслонка 26 для отработавших газов и/или перепускной клапан 27 компрессора могут управляться контроллером 12 через исполнительные механизмы (например, привод 150), например, чтобы открываться, когда требуется более низкое давление наддува.
Впускной канал 42 может дополнительно включать в себя охладитель 80 наддувочного воздуха (CAC) (например, промежуточный охладитель) для понижения температуры нагнетаемых турбонагнетателем или нагнетателем всасываемых газов. В некоторых вариантах осуществления, охладитель 80 наддувочного воздуха может быть воздушно-воздушным теплообменником. В других вариантах осуществления охладитель 80 наддувочного воздуха может быть воздушно-жидкостным теплообменником.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции отработавших газов (EGR) может направлять требуемую порцию отработавших газов из выпускного канала 48 во впускной канал 42 через канал 140 EGR. Величина EGR, выдаваемой во впускной канал 42, может регулироваться контроллером 12 посредством клапана 142 EGR. Кроме того, датчик EGR (не показан) может быть скомпонован внутри канала EGR и может выдавать показание одного или более из давления, температуры, концентрации отработавших газов. В качестве альтернативы, EGR может управляться посредством расчетного значения, основанного на сигналах с датчика MAF (выше по потоку), MAP (впускного коллектора), MAT (температуры газа в коллекторе) и датчика частоты вращения коленчатого вала. Кроме того, EGR может управляться на основании датчика O2 отработавших газов и/или кислородного датчика на впуске (впускного коллектора). В некоторых условиях, система EGR может использоваться для регулирования температуры смеси воздуха и топлива в пределах камеры сгорания. Фиг. 1 показывает систему EGR высокого давления, где EGR направляется из выше по потоку от турбины турбонагнетателя в ниже по потоку от компрессора турбонагнетателя. В других вариантах осуществления, двигатель, дополнительно или в качестве альтернативы, может включать в себя систему EGR низкого давления, где EGR направляется из ниже по потоку от турбины турбонагнетателя в выше по потоку от компрессора турбонагнетателя.
Далее, с обращением к фиг. 2, показана примерная компоновка 200 перепускной заслонки для отработавших газов. Перепускная заслонка 200 для отработавших газов, например, может быть перепускной заслонкой 26 для отработавших газов по фиг. 1. Перепускная заслонка 200 для отработавших приводится в действие приводом 202, который может быть приводом 150 на фиг. 1. В этом примере, привод 202 является электроприводом, включающим в себя электродвигатель, хотя возможны другие пригодные приводы (например, соленоид). Выходной вал 201 привода 202 присоединен к рычажному механизму 204 и, в частности, первому звену 206 рычажного механизма. Как показано, рычажный механизм 204 в проиллюстрированном варианте осуществления является четырехштанговым, хотя возможны различные пригодные рычажные механизмы, включающие в себя линейные тяги. Рычажный механизм 204 движется вокруг двух шарниров, в том числе, первого шарнира 208, вокруг которого вращаются первое звено 206 и второе звено 210, и второго шарнира 212, вокруг которого вращаются третье звено 214 и четвертое звено 216. Первое, второе, третье и четвертое звенья 206, 210, 214 и 216 обычно присоединены друг к другу для формирования рычажного механизма 204 в качестве по существу непрерывной детали. На конце, противоположном приводу 202, рычажный механизм 204 присоединен, на четвертом звене 216, к клапану 218 перепускной заслонки для отработавших газов, который может быть расположен в полностью открытом положении, полностью закрытом положении или где-нибудь между ними, относительно седла 220 клапана, расположенного на участке выпускного канала 222. Выпускной канал 222, например, может быть выпускным коллектором 46 по фиг. 1. Посредством позиционирования клапана 218 перепускной заслонки для отработавших газов этим непрерывно регулируемым образом, может регулироваться количество отработавших газов, достигающих турбины (например, турбины 62 по фиг. 1) турбонагнетателя. Таким образом, может регулироваться давление наддува, подаваемое в двигатель, такой как двигатель 10 по фиг. 1. Положение клапана 218 перепускной заслонки для отработавших газов у перепускной заслонки 200 для отработавших газов может регулироваться посредством приведения в действие привода 202 и размещения его выходного вала 201, перемещения которого передаются на клапан для отработавших газов через рычажный механизм 204.
Как показано, перепускная заслонка 200 для отработавших газов дополнительно включает в себя датчик 224 положения, который может быть выполнен с возможностью измерять положение клапана 218 перепускной заслонки для отработавших газов на основании изменений угла выходного вала 201. В частности, расстояние между нижней поверхностью клапана перепускной заслонки для отработавших газов и верхней поверхностью седла 220 клапана может измеряться датчиком 224 положения в форме подъема клапана. В других вариантах осуществления, однако, привод может быть линейным приводом, который действует на третье звено 214 без шарнира 208. В таких случаях, датчик 224 положения может считывать положение другого компонента внутри привода. Такие измерения могут использоваться для опосредованного определения положения клапана 218 перепускной заслонки для отработавших газов. Более того, в других вариантах осуществления, положение клапана перепускной заслонки для отработавших газов может определяться на основании программной модели с использованием одного или более сигналов (например, Наддув), описанных выше со ссылкой на фиг. 1, и отправляться в контроллер 12.
Фиг. 2 также иллюстрирует, каким образом может происходить изменение геометрии (например, длины) рычажного механизма 204. В некоторых сценариях, изменение геометрии рычажного механизма 204 происходит вследствие высоких окружающих температур, частично порождаемых раскаленными газами, проходящими через выпускной канал 222. Например, по мере того, как меняется температура рычажного механизма, рычажный механизм и его составляющие звенья могут расширяться или сжиматься. Это может включать в себя изменение расстояния между шарнирами 208 и 212. По существу, точность считывания положения клапана перепускной заслонки для отработавших газов может снижаться, приводя к неточной подаче наддува в двигатель.
Физическая деформация или прогиб могут происходить в рычажном механизме 204 по другим причинам. На высоких нагрузках (например, физической нагрузке на клапан 218 перепускной заслонки для отработавших газов), например, высокие давления, обусловленные прохождением отработавших газов через выпускной канал 222, действуют на нижнюю поверхность клапана 218 перепускной заслонки для отработавших газов в направлении, по существу ориентированном в направлении E. Для компенсации таких усилий отработавших газов, и для позиционирования клапана 218 перепускной заслонки для отработавших газов в положении, обеспечивающем требуемую подачу наддува в двигатель, по существу равное и противоположное усилие привода передается верхней поверхности клапана перепускной заслонки для отработавших газов в точке, в которой четвертое звено 216 присоединено к ней, через рычажный механизм 204 от привода 202, и по существу ориентировано в направлении A. Будучи реагирующим на давления отработавших газов и результирующие значительные усилия отработавших газов, усилие привода может вызывать изменение (например, удлинение, сжатие по длине) геометрии рычажного механизма 204, которое может указываться ссылкой в материалах настоящей заявке как «прогиб» или «деформация». Такой прогиб представлен прогнутым рычажным механизмом 226, проиллюстрированным прерывистыми линиями. Несмотря на то, что положение прогнутого рычажного механизма 226 смещено от рычажного механизма 204, оба рычажных механизма соответствуют одному и тому же положению клапана. Соответственно, может быть видно, каким образом датчик 224 положения может выявлять два разных положения рычажного механизма, и таким образом, положения клапана 218 перепускной заслонки для отработавших газов, соответствующие рычажному механизму 204 и прогнутому рычажному механизму 226. Выявление двух разных положений клапана перепускной заслонки для отработавших газов, когда клапан 218 перепускной заслонки для отработавших газов расположен на едином подъеме, может происходить для множества прогнутых рычажных механизмов по сравнению с их непрогнутыми эквивалентами.
Деформация рычажного механизма может давать в результате другие ошибки в отслеживании положения клапана перепускной заслонки для отработавших газов. Например, в некоторых сценариях, прогнутый рычажный механизм может побуждать датчик 224 положения выдавать выявленное положение клапана 218 перепускной заслонки для отработавших газов на первом физическом подъеме. Когда клапан 218 перепускной заслонки для отработавших газов физически расположен на втором физическом подъеме, отличном от первого физического подъема, хотя, в некоторых примерах, относительно близком, датчик 224 положения может выдавать одно и то же выявленное положение. Другими словами, датчик 224 положения, в этом примере, выдает один и тот же выявленный подъем для двух разных действующих физических подъемов. Как в сценарии, описанном выше, может привноситься неточность позиционирования клапана перепускной заслонки для отработавших газов, вызывая подачу неточных уровней наддува в двигатель.
В некоторых узлах перепускной заслонки для отработавших газов, таких как перепускная заслонка 200 для отработавших газов, прогиб рычажного механизма, происходящий в степени, которая оказывает влияние на подачу наддува на неприемлемом пределе, может начинать проявлять пороговую нагрузку, при которой усилия (например, усилия привода и отработавших газов) выше порогового значения усилия прикладываются к клапану 218 перепускной заслонки для отработавших газов. Будет отмечено, что, в этом контексте, нагрузка указывает ссылкой на физическую нагрузку на клапане 218 перепускной заслонки для отработавших газов, обусловленную одним или обоими из усилия, сообщаемого приводом 202, и усилия, сообщаемого потоком отработавших газов через выпускной канал 222. По существу, способы, описанные ниже, могут применять компенсацию прогиба рычажного механизма выше пороговой нагрузки клапана перепускной заслонки для отработавших газов.
Будет принято во внимание, что перепускная заслонка 200 для отработавших газов и различные компоненты в ней могут быть модифицированы, не выходя из объема этого раскрытия. Например, датчик тока и/или датчик усилия могут быть включены в состав приводом 202 вместо или в дополнение к датчику 224 положения. Считыванию тока может оказываться содействие с помощью датчика или зонда, или, в других примерах, может рассчитываться на основании закона Ома (или другой зависимости) в качестве отношения напряжения на приводе (например, напряжения на клеммах) и сопротивления привода, если эти две величины известны или могут быть измерены, и когда имеется в распоряжении справочная таблица сопротивления/температуры. Кроме того, как описан выше, другие типы рычажных механизмов могут быть предусмотрены для соединения привода 202 с клапаном 218 перепускной заслонки для отработавших газов, в том числе, но не в качестве ограничения, линейная тяга.
Далее, с обращением к фиг. 3A, показана блок-схема последовательности операций способа, иллюстрирующая способ 300, который может выполняться контроллером двигателя (например, контроллером 12) для управления турбонагнетателем с помощью регулятора давления наддува (например, регулятора 200 давления наддува). В одном из примеров, способ для управления турбонагнетателем двигателя с помощью перепускной заслонки для отработавших газов может содержать определение требуемого давления наддува и действующего давления наддува. Перепускная заслонка для отработавших газов может настраиваться согласно разности между требуемым давлением наддува и действующим давлением наддува.
На 302, способ включает в себя определение требуемого наддува согласно требованию водителя и условиям эксплуатации двигателя. Оцениваемые условия могут непосредственно измеряться датчиками, например, такими как датчики 112, 118, 120, 122, 123 и 134, и/или условия могут оцениваться по другим условиям эксплуатации двигателя. Оцениваемые условия могут включать в себя температуру охлаждающей жидкости двигателя, температуру моторного масла, массовый расход воздуха (MAF), давление в коллекторе (MAP), наддув (например, давление наддува с датчика 123), число оборотов двигателя, число оборотов холостого хода, барометрическое давление, требуемый водителем крутящий момент (например, с датчика 134 положения педали), температуру воздуха, скорость транспортного средства, и т.д.
Затем, на 304, может определяться фактическое давление наддува. Действующий наддув может измеряться непосредственно по датчику, такому как датчик 123. Измерение может отправляться в контроллер 12 с помощью сигнала давления наддува и сохраняться на машинно-читаемом запоминающем носителе. В альтернативном варианте осуществления, действующее давление наддува может оцениваться на основании других рабочих параметров, таких как, например, на основании MAP и RPM.
Затем, на 306, может определяться атмосферное давление. Например, атмосферное давление может измеряться по датчику MAP при запуске двигателя и/или оцениваться на основании условий эксплуатации двигателя, в том числе, MAF, MAP, положения дросселя, и т.д. Измерение может отправляться в контроллер 12 и сохраняться на машинно-читаемом запоминающем носителе. В альтернативном варианте осуществления, атмосферное давление может оцениваться на основании других рабочих параметров.
Затем, на 308, определяется разность между действующим и требуемым наддувом. Контроллер двигателя, например, такой как контроллер 12, может определять разность. В некоторых примерах, разность может определяться вычитанием требуемого наддува из действующего наддува.
Затем, на 310, подъем клапана перепускной заслонки для отработавших газов определяется, для того чтобы уменьшать разность между действующим и требуемым наддувом, определенную на 308. В некоторых примерах, разность между действующим и требуемым наддувом, в дополнение к текущему подъему клапана перепускной заслонки для отработавших газов, подается на пригодный механизм управления, выполненный с возможностью определять подъем клапана перепускной заслонки для отработавших газов, для того чтобы уменьшать эту разность. Например, подъем клапана перепускной заслонки для отработавших газов может использоваться в качестве входных данных в динамическую модель перепускной заслонки для отработавших газов. В некоторых приводах перепускной заслонки для отработавших газов, подъем клапана перепускной заслонки для отработавших газов может отображаться в относительную длительность включения перепускной заслонки для отработавших газов, где сигнал относительной длительности включения формируется контроллером и отправляется на привод перепускной заслонки для отработавших газов. Отображение в относительную длительность включения перепускной заслонки для отработавших газов может включать в себя использование справочных таблиц или расчет относительной длительности включения перепускной заслонки для отработавших газов. В некоторых других приводах, регулятор перепускной заслонки для отработавших газов определяет относительную длительность включения на основании разности между требуемым и действующим положениями перепускной заслонки для отработавших газов. Сигнал управления перепускной заслонкой для отработавших газов (WGC) может включать в себя широтно-импульсную модуляцию посредством относительной длительности включения для настройки перепускной заслонки для отработавших газов. Подъем клапана перепускной заслонки для отработавших газов, например, может достигаться посредством алгоритмов управления с прямой связью, обратной связью и/или других алгоритмов управления.
Член компенсации может учитывать задержки привода перепускной заслонки для отработавших газов. Дополнительно, член компенсации дополнительно может включать в себя настройки, основанные на перемещении сдвоенных независимых кулачков, которые могут оказывать влияние на давление наддува. Например, по мере того, как впускной кулачок перемещается некоторым образом, который увеличивал бы давление наддува относительно атмосферного давления, величина члена компенсации может уменьшаться. Подобным образом, по мере того, как впускной кулачок перемещается некоторым образом, который уменьшал бы давление наддува относительно атмосферного давления, величина члена компенсации может увеличиваться.
Затем, на 312, требуемое положение привода определяется для достижения подъема клапана перепускной заслонки для отработавших газов, определенного на 310. Требуемое положение привода может подаваться в качестве входного сигнала в различные пригодные механизмы управления, такие как описанные выше. В некоторых вариантах осуществления, требуемая ориентация привода может определяться в качестве альтернативы, такая как угловая ориентация вращающегося компонента в приводе.
Далее, с обращением к фиг. 3B, способ 300 продолжает движение на 314, где ток подается в привод, чтобы добиваться требуемого положения привода, определенного на 312. В некоторых вариантах осуществления, например, ток может определяться с помощью динамической модели перепускной заслонки, описанной выше.
Затем, на 316, определяется, имеется ли в распоряжении поправка для считанного положения клапана перепускной заслонки для отработавших газов турбонагнетателя. Поправка положения может разыскиваться в попытке компенсировать ошибки считывания положения клапана перепускной заслонки для отработавших газов, обусловленные физическими изменениями рычажного механизма, присоединяющего клапан перепускной заслонки для отработавших газов к приводу - например, тепловой деформацией (например, расширением, сжатием, и т.д.) вследствие высоких окружающих температур и прогибом вследствие значительны усилий, сообщаемых рычажному механизму (например, усилий привода и/или отработавших газов). Множество поправок может сохраняться в пригодной базе данных (например, справочной таблице, многомерной характеристике, и т.д.), причем, каждая поправка, ассоциативно связанная с дополнительными параметрами, такими как ток, прикладываемый к приводу клапана перепускной заслонки для отработавших газов, оцененное давление отработавших газов, прикладываемое к клапану перепускной заслонки для отработавших газов в момент времени, когда определялась поправка, и/или температура во время определения поправки. Температура, например, может быть основана на сигналах ECT, описанных выше. Таким образом, в некоторых вариантах осуществления, поправка положения может быть предусмотрена для заданных тока привода, давления отработавших газов и/или температуры. Если определено, что поправка положения имеется в распоряжении для данного привода и/или температуры (Да), способ 300 переходит на 318. Если определено, что поправки положения нет в распоряжении (Нет), способ переходит на 320.
На 318, поправка положения для считанного положения клапана перепускной заслонки для отработавших газов применяется на основании тока, приложенного к приводу, или усилия, приложенного к клапану перепускной заслонки для отработавших газов, и температуры рычажного механизма привода-клапана. фиг. 4A, 4B и 5 показывают блок-схемы последовательности операций способа, иллюстрирующие соответственные способы для определения поправки положения клапана перепускной заслонки для отработавших газов. В частности, способ 400, проиллюстрированный фиг. 4A и 4B, может использоваться для определения поправки положения клапана перепускной заслонки для отработавших газов, когда клапан перепускной заслонки для отработавших газов находится в контакте со своим седлом клапана (например, в полностью закрытом положении), который может возникать, когда требуется максимальный наддув. Способ 500, проиллюстрированный фиг. 5, может использоваться для определения поправки положения клапана перепускной заслонки для отработавших газов во время выполнения команды перепускной заслонки отработавших газов, дающей указание клапану перепускной заслонки для отработавших газов перемещаться в направлении его седла клапана. Таким образом, поправка положения клапана перепускной заслонки для отработавших газов может определяться с помощью способа 500, когда клапан перепускной заслонки для отработавших газов отделен от своего седла клапана и находится в по меньшей мере частично открытом положении. Будет принято во внимание, что дополнительные вершины принятия решения могут быть добавлены в способ 300 для содействия определению, находится ли клапан перепускной заслонки для отработавших газов на своем седле клапана или перемещается в направлении седла клапана на основании выданной команды закрывания.
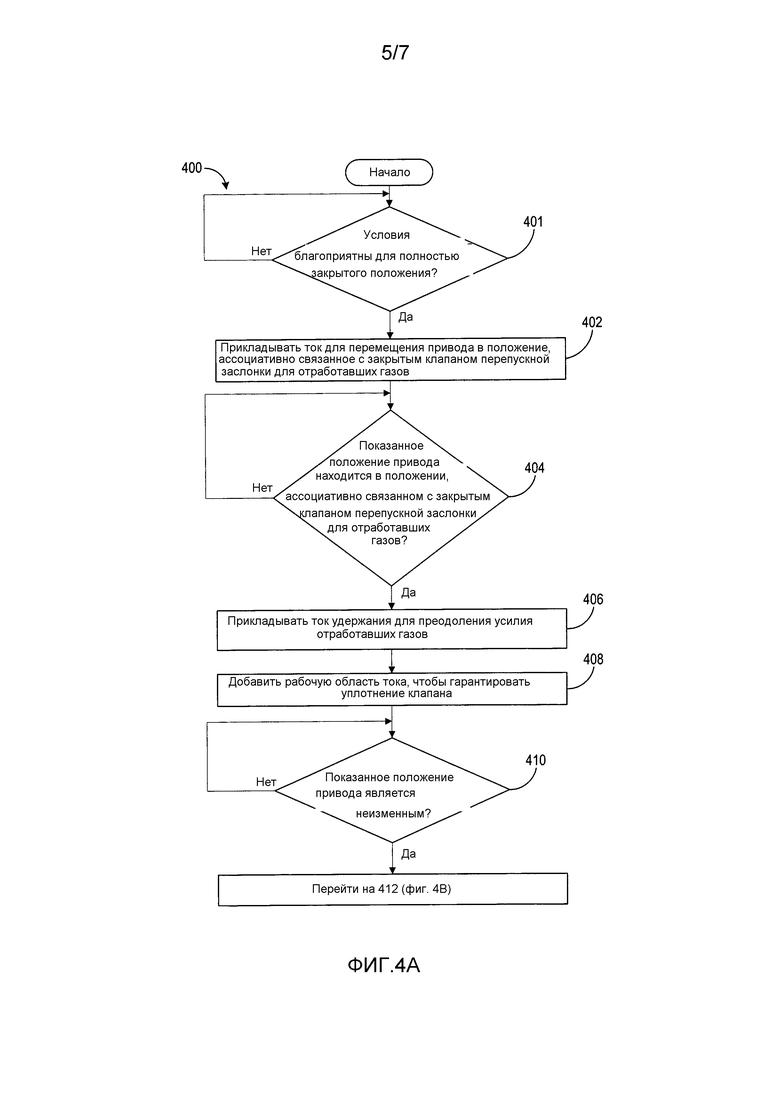
Далее, с обращением к фиг. 4A, показана блок-схема последовательности операций способа, иллюстрирующая способ 400 для оценки прогиба привода-рычажного механизма клапана перепускной заслонки для отработавших газов. Способ 400 может применяться в среде для сборки перед установкой перепускной заслонки для отработавших газов на двигателе, или может выполняться на всем протяжении его срока службы в эксплуатации, как необходимо для поддержания точного отслеживания клапана перепускной заслонки для отработавших газов. Способ 400 может использоваться для оценки прогиба рычажного механизма 204 перепускной заслонки 200 для отработавших газов, например, когда клапан 218 перепускной заслонки для отработавших газов находится в полностью закрытом положении и в контакте с седлом 220 клапана.
На 401 способа 400, определяется, благоприятны ли условия эксплуатации для размещения клапана перепускной заслонки для отработавших газов в его полностью закрытом положении. Условия, благоприятные для такого размещения, могут включать в себя сценарии, в которых клапан перепускной заслонки для отработавших газов уже размещен в полностью закрытом положении, или команда полностью закрытого положения выдается на перепускную заслонку для отработавших газов. Эти условия могут происходить во время работы двигателя. Другие благоприятные условия могут включать в себя дросселированный поток воздуха выше по потоку от компрессора турбонагнетателя или событие перекрытия топлива при замедлении (DFCO). Если определено, что условия не благоприятны для размещения клапана перепускной заслонки для отработавших газов в полностью закрытом положении (Нет), способ возвращается на 401. Если определено, что условия благоприятны для размещения клапана перепускной заслонки для отработавших газов в полностью закрытом положении (Да), способ переходит на 402.
На 402, ток подается для перемещения привода (например, привода 202 по фиг. 2) в положение привода, ассоциативно связанное с полностью закрытым положением клапана перепускной заслонки для отработавших газов. Например, справочная таблица может подвергаться справке для получения положения привода, ассоциативно связанного с полностью закрытым положением. В других вариантах осуществления, ток может прикладываться к приводу, чтобы размещать один или более компонентов привода в требуемой ориентации.
Затем, на 404, определяется, находится ли показанное положение привода в положении, ассоциативно связанном с полностью закрытым положением клапана перепускной заслонки для отработавших газов. Например, может оцениваться обратная связь с одного или более датчиков, показывающих состояние (например, положение, угловую ориентацию, и т.д.) привода. Если показанное положение привода не находится в положении, ассоциативно связанном с полностью закрытым положением (Нет), способ возвращается на 404. Если показанное положение привода находится в положении, ассоциативно связанном с полностью закрытым положением (Да), способ переходит на 406.
На 406, ток удержания прикладывается к приводу для преодоления усилия отработавших газов, действующего на клапан перепускной заслонки для отработавших газов. Усилие отработавших газов, например, может действовать на клапан перепускной заслонки для отработавших газов в направлении, по существу ориентированном в направлении E, показанном на фиг. 2.
Затем, на 408, ток удержания повышается посредством добавления рабочей области тока, для того чтобы гарантировать уплотнение клапана перепускной заслонки для отработавших газов. Рабочая область тока может увеличивать прикладываемый ток сверх минимального тока, требуемого для удержания клапана перепускной заслонки для отработавших газов на его седле клапана. При клапане перепускной заслонки для отработавших газов в полностью закрытом положении на седле клапана, изменения тока удержания, прикладываемого к приводу, выше минимального тока удержания, требуемого для поддержки полностью закрытого положения, будут переменным образом прогибать рычажный механизм. Соответственно, измерения датчика будут меняться по мере того, как меняется ток удержания. Однако, так как полностью закрытое положение поддерживается по мере того, как токи удержания меняются таким образом, изменения измерений датчика будут отражать степень, с которой прогибается рычажный механизм. Таким образом, измерение датчика, соответствующее конкретному току удержания, может подвергаться поправке во время последующей работы перепускной заслонки для отработавших газов по мере того, как клапан перепускной заслонки для отработавших газов перемещается на всем протяжении своего диапазона подъемов, на основании поправок, полученных с помощью способа 400.
Затем, на 410, определяется, является ли показанное положение привода неизменным. Здесь, может оцениваться обратная связь с датчика положения или другого типа датчика. В некоторых вариантах осуществления, изменения показанного положения привода ниже порогового значения могут игнорироваться. Если показанное положение привода не остается постоянным (Нет), способ возвращается на 410. Если показанное положение привода остается постоянным (Да), способ переходит на 412.
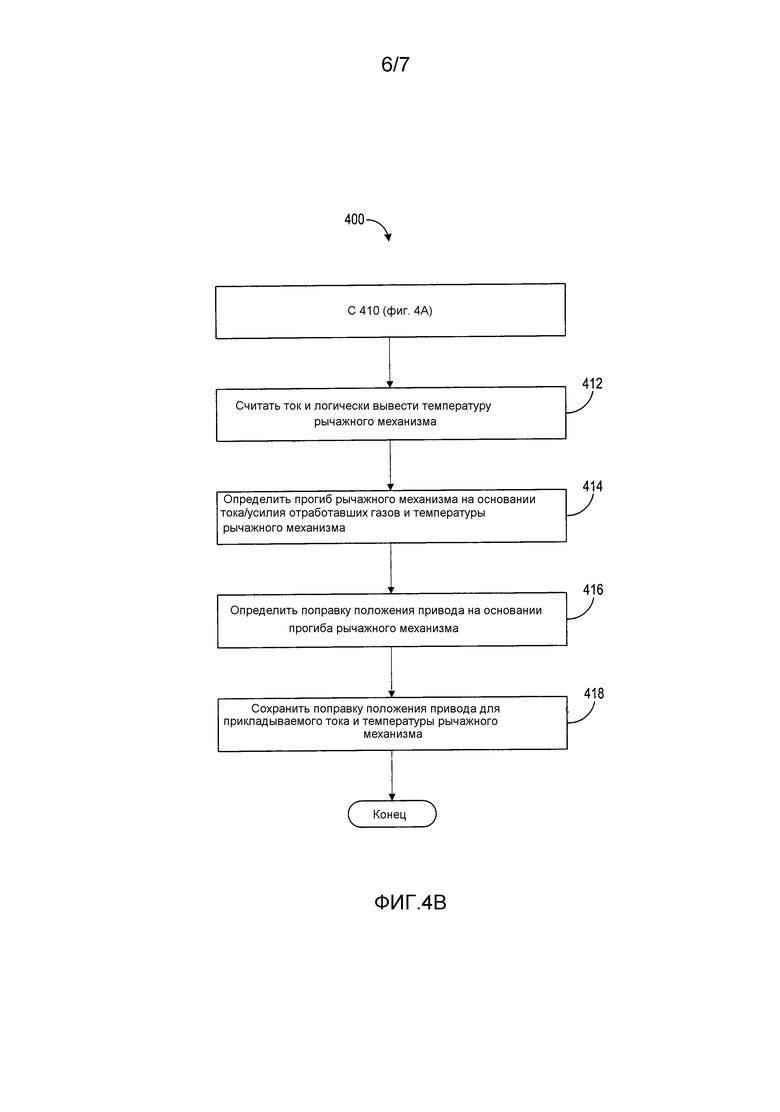
С обращением к фиг. 4B, на 412, ток, приложенный к приводу, считывается, и логически выводится температура рычажного механизма привода-клапана. Температура рычажного механизма может логически выводиться различными пригодными способами. Например, температура рычажного механизма может логически выводиться на основании температуры корпуса турбины или отработавших газов.
Затем, на 414, прогиб рычажного механизма определяется на основании тока, приложенного к приводу, или усилия отработавших газов, приложенного к клапану перепускной заслонки для отработавших газов, и температуры рычажного механизма, логически выведенной на 412. Степень, с которой рычажный механизм может подвергаться тепловой деформации, может оцениваться на основании логически выведенной температуры рычажного привода и известных свойств теплового расширения рычажного механизма. Прогиб рычажной передачи, обусловленный усилиями привода и отработавших газов, может оцениваться на основании линейной зависимости следующей формы: D=mF+b, где D - прогиб рычажной передачи, F - усилие, приложенное к рычажному механизму, а m и b - постоянные или справочные таблицы. Усилие F, приложенное к рычажному механизму, может включать в себя составляющие усилия, такие как усилия привода и отработавших газов. Дополнительный член может быть добавлен в эту зависимость, чтобы учитывать тепловую деформацию, описанную выше, или тепловая деформация и прогиб от усилия могут рассматриваться в отдельности.
Затем, на 416, поправка положения для положения привода определяется на основании прогиба рычажного механизма, определенного на 414. Линейная зависимость, например, описанная выше, может использоваться для определения поправки. Поправка положения привода повышает точность позиционирования клапана перепускной заслонки для отработавших газов и, таким образом, регулирования наддува, учитывая прогиб и деформацию рычажного механизма, обусловленные сообщаемыми усилиями и высокими окружающими температурами.
В заключение, на 418, поправка положения привода на ток, приложенный к приводу, и температуру рычажного механизма сохраняется. Таким образом, поправки положения привода ассоциативно связываются с соответствующими токами и температурами, из условия чтобы поправка положения могла подвергаться доступу для данных тока и/или температуры в некотором диапазоне токов и температур. В некоторых примерах, диапазон может покрывать по существу всю полноту рабочего диапазона перепускной заслонки для отработавших газов. Поправки положения и ассоциативно связанные токи и температуры могут сохраняться и извлекаться в различных пригодных базах данных, в том числе, справочных таблицах или многомерных характеристиках, например, в ОЗУ 108 и/или KAM 110 контроллера 12 на фиг. 1.
Будет принято во внимание, что способ 400 может быть модифицирован различными подходящими путями, не выходя из объема этого раскрытия. В некоторых вариантах осуществления, компоновка перепускной заслонки для отработавших газов, для которой должен учитываться прогиб рычажного механизма, может предусматривать датчик, выполненный с возможностью измерять усилие, сообщаемое рычажному механизму приводом. Например, таким датчиком усилия может быть заменен датчик 224 положения на фиг. 2. В таком случае, модифицированный способ может регистрировать измерение с датчика усилия и определять поправку усилия для соответствующего тока удержания. Дополнительные поправки усилия могут определяться для диапазона требуемых токов удержания и температур, как подобным образом описано выше, которые могут быть закодированы в форме справочной таблицы или многомерной характеристики, выдающих поправки усилия для данных токов удержания и температур.
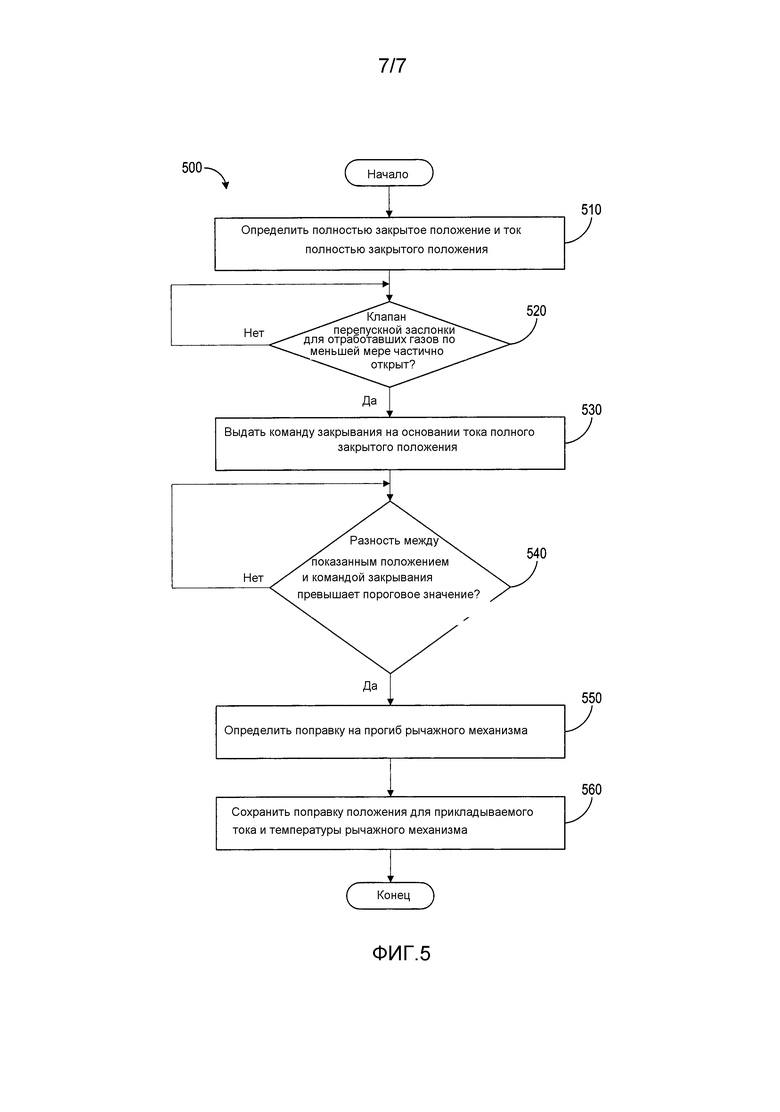
Далее, с обращением к фиг. 5, показана блок-схема последовательности операций способа, иллюстрирующая альтернативный способ 500 для оценки прогиба привода-рычажного механизма клапана перепускной заслонки для отработавших газов. Способ 500 может применяться в среде для сборки перед установкой перепускной заслонки для отработавших газов на двигателе, или может выполняться на всем протяжении его срока службы в эксплуатации, как необходимо для поддержания точного отслеживания клапана перепускной заслонки для отработавших газов. Способ 500 может использоваться для оценки прогиба рычажного механизма 204 перепускной заслонки 200 для отработавших газов, например, когда клапан 218 перепускной заслонки для отработавших газов по меньшей мере частично отделен от седла 220 клапана и находится в по меньшей мере частично открытом положении.
На 510 способа 500, определяется полностью закрытое положение клапана перепускной заслонки для отработавших газов, в котором нижняя поверхность клапана перепускной заслонки для отработавших газов находится в контакте с верхней поверхностью седла клапана, в дополнение к току привода, требуемому для поддержания клапана перепускной заслонки для отработавших газов в полностью закрытом положении. Полностью закрытое положение и ток могут логически выводиться, например, посредством отслеживания обратной связи с датчика положения клапана перепускной заслонки для отработавших газов и/или тока, подаваемого на электропривод, функционально присоединенный к клапану перепускной заслонки для отработавших газов, по мере того, как клапан перепускной заслонки для отработавших газов перемещается в направлении полностью закрытого положения. В некоторых сценариях, скорость изменения обратной связи датчика положения может убывать по достижению полностью закрытого положения, и/или может возрастать ток, подаваемый на электропривод. Такие показатели могут использоваться для определения полностью закрытого положения. В некоторых вариантах осуществления, полностью закрытые положения, изученные раньше до выполнения способа 500, могут храниться в контроллере двигателя (например, контроллере 12) и использоваться в качестве полностью закрытого положения на 510, в особенности если условия эксплуатации (например, требуемый крутящий момент) не благоприятны для определения полностью закрытого положения. Например, могут использоваться недавно определенные полностью закрытые положения и/или полностью закрытые положения, определенные для температуры (например, температуры отработавших газов), меньшей, чем пороговый перепад от текущей температуры.
Затем, на 520, определяется, является ли клапан перепускной заслонки для отработавших газов по меньшей мере частично открытым. Если определено, что перепускная заслонка для отработавших газов не является по меньшей мере частично открытой (Нет), способ возвращается на 520. Если полностью закрытое положение определяется перемещением клапана перепускной заслонки для отработавших газов относительно его седла клапана на 510, способ предоставляет перепускной заслонке для отработавших газов возможность отделяться от седла клапана до перехода. Клапан перепускной заслонки для отработавших газов может отделяться от своего седла клапана, например, посредством других команд перепускной заслонки для отработавших газов или давлений отработавших газов. Различные пригодные пороговые значения подъема могут определять частично открытое положение - например, клапан перепускной заслонки для отработавших газов может считаться частично открытым на 20% или более от максимального подъема. Если определено, что клапан перепускной заслонки для отработавших газов является по меньшей мере частично открытым (Да), способ 500 переходит на 530.
На 530, команда закрывания выдается на перепускную заслонку для отработавших газов на основании тока, требуемого для поддержания клапана перепускной заслонки для отработавших газов в полностью закрытом положении. Команда закрывания также может задавать относительно низкую скорость, с которой клапан перепускной заслонки для отработавших газов должен перемещаться в отношении его седла клапана.
Затем, на 540, определяется, превышает ли разность между показанным положением и командой закрывания, выданной на 530, пороговую разность. В некоторых вариантах осуществления, множество предписанных подъемов клапана перепускной заслонки для отработавших газов может получаться непосредственно или опосредованно из команды закрывания. Множество предписанных подъемов затем может сравниваться с показанным положением (например, обратной связью датчика положения с датчика 224) с подходящими временными интервалами, чтобы оценивать, отслеживает ли обратная связь датчика команду закрывания. Обратная связь с других типов датчиков, в том числе, датчиков усилия и тока, также может использоваться, и выходной сигнал с одного или обоих датчиков и команда закрывания могут преобразовываться в различные пригодные единицы измерения для облегчения сравнения датчика-команды. Кроме того, в некоторых вариантах осуществления, могут оцениваться разности между показанными положениями привода и соответствующими предписанными положениями привода. Если определено, что разность между показанным положением и командой закрывания не превышает пороговое значение (Нет), способ возвращается на 540, чтобы обеспечивать непрерывное отслеживание на всем протяжении длительности, в течение которой выдается команда. В некоторых примерах, команды закрывания, выдаваемые на 530, могут задавать относительно низкие скорости перемещения, которые могут предоставлять возможность тщательного сравнения обратной связи датчика с выданными командами. Если, взамен, определено, что разность между показанным положением и командой закрывания не превышает пороговое значение (Да), способ переходит на 550.
На 550, определяется поправка на прогиб рычажного механизма для компенсации неточной обратной связи датчика. Что касается вариантов осуществления, в которых предусмотрен датчик положения (например, датчик 224), и предписанные положения могут выводиться из команды закрывания, поправка может быть поправкой положения, определенной на основании разности между положением, указанным датчиком положения, и положением, предписанным командой закрывания в соответствующий момент времени (например, в момент времени, в который разность превышает пороговое значение на 540). Поправка положения может указывать действующее положение клапана перепускной заслонки для отработавших газов, принимая во внимание деформацию или прогиб рычажного механизма перепускной заслонки для отработавших газов, присоединяющего клапан к приводу. Однако, пригодные поправки для вариантов осуществления, в которых один или более из выходного сигнала датчика и выходного сигнала команды закрывания соответствуют параметрам, иным, чем подъем клапана перепускной заслонки для отработавших газов, могут определяться подобным образом. Кроме того, как описано выше, поправки могут выводиться для положений привода в качестве альтернативы или в дополнение к положениям клапана перепускной заслонки для отработавших газов.
В заключение, на 560, поправка положения сохраняется для приложенного тока привода и температуры рычажного механизма. Поправка положения и ассоциативно связанные ток и температура могут сохраняться в различных подходящих базах данных, включающих в себя справочные таблицы и многомерные характеристики. Таким образом, поправки положения (например, поправки положения клапана, поправки положения привода, и т.д.) могут сохраняться для диапазона токов и температур и извлекаться для повышения точности регулирования наддува.
Вслед за 560, способ 500 заканчивается и возвращается на 320 способа 300 по фиг. 3. На 320 способа 300, определяется, находится ли исправленное положение привода в требуемом положении привода. Здесь, считанное положение привода, исправленное посредством поправки положения, может сравниваться с требуемым положением привода. В некоторых вариантах осуществления, разности между исправленным положением привода и требуемым положением привода ниже порогового значения могут игнорироваться. Если исправленное положение привода не находится в требуемом положении привода (Нет), способ возвращается на 314. Если исправленное положение привода находится в требуемом положении привода (Да), способ переходит на 322.
На 322 способа 300, ток, подаваемый на привод, настраивается для поддержания требуемого подъема клапана. Требуемый подъем клапана может поддерживаться с помощью алгоритмов управления с прямой связью и/или обратной связью. Например, подъем клапана может регулироваться с помощью вспомогательного контура регулирования. Таким образом, приложенный ток настраивается, когда исправленное положение привода достигает положения, соответствующего требуемому положению клапана.
Будет принято во внимание, что способ 300 может модифицироваться различными подходящими способами. Например, поправка (например, поправка положения), определенная с помощью способа 400 или 500, может применяться в других областях способа 300. Кроме того, что касается некоторых компоновок перепускной заслонки для отработавших газов, прогиб рычажного механизма привода клапана перепускной заслонки для отработавших газов может быть линейной функцией следующей формы: D = (m * F) + b, где D - прогиб рычажного механизма, F - усилие, приложенное к рычажному механизму, а m и b - постоянные. F может включать в себя усилие, сообщаемое рычажному механизму приводом (например, приводом 202), и дополнительно включает в себя усилия отработавших газов, действующие на рычажный механизм. Что касается вариантов осуществления, в которых предусмотрен датчик, измеряющий усилие привода, приложенное к рычажному механизму, прогиб рычажного механизма может оцениваться и компенсироваться на основании вышеприведенной линейной функции и посредством ассоциативного связывания поправок положения, определенных с помощью способа 400 или 500, со значениями усилия привода. В качестве альтернативы или дополнительно, что касается вариантов осуществления, в которых привод является электродвигателем, усилие F привода (например, усилие электродвигателя) может преобразовываться в значение тока на основании известных зависимостей, соотносящих ток электродвигателя с усилием/крутящим моментом электродвигателя.
В некоторых вариантах осуществления, способ 300 может включать в себя вершину принятия решения, не показанную, способствующую определению, находится ли физическая нагрузка на клапан перепускной заслонки для отработавших газов (например, клапан 218 перепускной заслонки для отработавших газов) выше пороговой нагрузки клапана. Нагрузка клапана может определяться по существу непосредственным образом, например, посредством определения усилия, сообщаемого клапану перепускной заслонки для отработавших газов приводом (например, приводом 202), и/или усилия отработавших газов, сообщаемого отработавшими газами в по существу противоположном направлении (например, направлении E на фиг. 2). Например, усилие привода, сообщаемое клапану перепускной заслонки для отработавших газов, может определяться на основании обратной связи с датчика усилия или тока наряду с тем, что усилие отработавших газов может определяться на основании обратной связи с датчика, выполненного с возможностью считывать давление отработавших газов. Давление отработавших газов, в качестве альтернативы, может рассчитываться на основании одного или более сигналов, отправленных в контроллер 12 по фиг. 1. Возможны другие способы для определения нагрузки клапана, в том числе, в большей степени опосредованные подходы, в которых нагрузка клапана оценивается на основании нагрузки двигателя. Определение, находится ли физическая нагрузка на клапане перепускной заслонки для отработавших газов выше пороговой нагрузки клапана, побуждает к определению поправок положения только для условий эксплуатации, в которых происходят существенные деформация/прогиб рычажного механизма (например, температур и/или усилий выше соответственных пороговых значений).
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Способы и процедуры управления, раскрытые в материалах настоящей заявки, могут храниться в качестве исполняемых команд в постоянной памяти. Специфичные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машинно-читаемого запоминающего носителя в системе управления двигателем.
Будет принято во внимание, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
Изобретение может быть использовано в двигателях внутреннего сгорания с турбонагнетателями. Способ управления перепускной заслонкой предназначен для перепускной заслонки (200), содержащей рычажный механизм (204), клапан (218) перепускной заслонки для отвода отработавших газов от двигателя к турбонагнетателю и контроллер, имеющий инструкции для выполнения этапов способа. Клапан (218) перепускной заслонки присоединен к приводу (202). Способ заключается в том, что прикладывают ток к приводу (202) для перемещения клапана (218) перепускной заслонки и показывают положение привода (202). Применяют поправку к показанному положению привода (202), компенсирующую прогиб рычажного механизма (204), на основании приложенного тока. Настраивают ток, приложенный к приводу (202), когда исправленное положение привода достигает положения, соответствующего требуемому положению клапана (218) перепускной заслонки для поддержания подъема клапана (218) перепускной заслонки. Раскрыты варианты способа управления перепускной заслонкой. Технический результат заключается в повышении точности управления наддувом. 3 н. и 17 з.п. ф-лы, 7 ил. 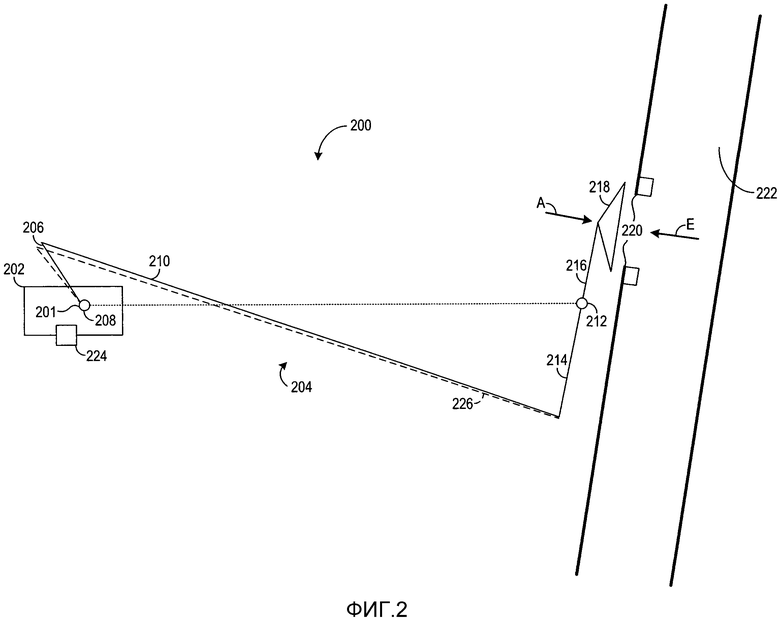
1. Способ управления перепускной заслонкой, содержащей: рычажный механизм, присоединяющий клапан перепускной заслонки к приводу для отвода отработавших газов от двигателя к турбонагнетателю, и контроллер, имеющий инструкции для выполнения этапов способа, на которых:
прикладывают ток к приводу для перемещения клапана перепускной заслонки, показывающего положение привода;
применяют поправку к упомянутому показанному положению привода, компенсирующую прогиб рычажного механизма, на основе по меньшей мере упомянутого приложенного тока; и
настраивают упомянутый ток, приложенный к приводу, когда упомянутое исправленное положение привода достигает положения, соответствующего требуемому положению клапана перепускной заслонки для поддержания подъема клапана перепускной заслонки.
2. Способ по п. 1, в котором упомянутая поправка выдается из хранимой базы данных поправок положения привода на упомянутый ток, приложенный к упомянутому приводу, определенный во время предыдущих испытательных циклов, и температуру рычажного механизма.
3. Способ по п. 1, в котором упомянутое показанное положение привода выдается с датчика положения, присоединенного к приводу.
4. Способ по п. 1, в котором упомянутое показанное положение привода выдается по электрическому току, подведенному к приводу.
5. Способ по п. 1, в котором турбонагнетатель включает в себя турбину, сообщающуюся с газами из выпуска двигателя, и при этом клапан расположен в перепускном канале параллельно с упомянутой турбиной, и при этом турбонагнетатель включает в себя воздушный компрессор, приводимый в движение упомянутой турбиной и сообщающийся с впуском воздуха двигателя.
6. Способ по п. 5, в котором упомянутое требуемое положение привода основано на требуемом наддуве из упомянутого компрессора, который, в свою очередь, основан на требуемом выходном крутящем моменте двигателя.
7. Способ по п. 1, в котором привод содержит электродвигатель, и причем клапан перепускной заслонки присоединен к переходу, ведущему от выше по потоку от турбины турбонагнетателя к ниже по потоку от турбины.
8. Способ по п. 7, в котором упомянутый электродвигатель управляет подъемом клапана перепускной заслонки.
9. Способ по п. 1, в котором привод содержит соленоид.
10. Способ управления перепускной заслонкой, содержащей: рычажный механизм, присоединяющий перепускную заслонку, расположенную в перепускном канале вокруг турбонагнетателя, к приводу, и контроллер, имеющий инструкции для выполнения этапов способа, на которых:
прикладывают ток к приводу для перемещения клапана перепускной заслонки в направлении требуемого положения;
показывают положение привода;
выводят поправку для прогиба рычажного механизма от сохраненного в базе данных, созданную во время предыдущих испытательных циклов, и на основании упомянутого приложенного тока и температуры рычажного механизма применяют упомянутую поправку к упомянутому показанному положению привода; и
настраивают упомянутый ток, приложенный к приводу, когда упомянутое исправленное положение привода достигает положения, соответствующего требуемому положению клапана перепускной заслонки.
11. Способ по п. 10, в котором каждая из упомянутых поправок положения привода создана во время предыдущих испытательных циклов посредством процедуры, содержащей:
определение полностью закрытого положения клапана перепускной заслонки;
когда клапан находится по существу в открытом положении, выдачу командного тока закрывания к приводу;
логический вывод положения привода на основании упомянутого командного тока закрывания и упомянутого определенного полностью закрытого положения; и
создание упомянутой коррекции положения на основании разности между логически выведенным положением привода и показанным положением привода.
12. Способ по п. 11, в котором упомянутое полностью закрытое положение определяется скоростью изменения упомянутого положения привода, превышающей заданную величину.
13. Способ по п. 11, в котором упомянутое полностью закрытое положение определяется, когда упомянутый приложенный ток достигает предопределенной величины.
14. Способ по п. 11, в котором упомянутое указание положения привода выполняется от датчика положения, соединенного с приводом.
15. Способ управления перепускной заслонкой, содержащей: рычажный механизм, присоединяющий перепускную заслонку, расположенную в перепускном канале вокруг турбонагнетателя к приводу, и контроллер, имеющий инструкции для выполнения этапов способа, на которых:
прикладывают ток к приводу для перемещения перепускной заслонки в направлении требуемого положения;
показывают положение привода;
применяют поправку к упомянутому показанному положению привода, компенсирующую прогиб рычажного механизма, на основании по меньшей мере упомянутого приложенного тока;
причем упомянутая поправка положения привода, созданная во время одного или более предыдущих испытательных циклов посредством процедуры, содержащей: повышение упомянутого приложенного тока для перемещения клапана перепускной заслонки в полностью закрытое положение; после того, как клапан удерживается в закрытом положении, дополнительное повышение приложенного тока, чтобы вызвать прогиб рычажного механизма, при этом изменение упомянутого показанного положения привода во время упомянутого этапа повышения приложенного тока сохраняется в качестве упомянутой поправки на упомянутый прогиб; и
настраивают упомянутый ток, приложенный к приводу, когда упомянутое исправленное положение привода достигает положения, соответствующего упомянутому требуемому положению клапана перепускной заслонки для поддержания подъема клапана перепускной заслонки.
16. Способ по п. 15, в котором каждая из упомянутых хранимых поправок хранится в таблице или многомерной характеристике, и каждая ячейка таблицы или многомерной характеристики подвергается доступу посредством упомянутого приложенного тока, который вызывал упомянутый прогиб во время упомянутого испытательного цикла, и температуры рычажного механизма во время упомянутого испытательного цикла.
17. Способ по п. 15, в котором турбонагнетатель включает в себя турбину, сообщающуюся с выпуском двигателя, и при этом перепускной канал соединен с упомянутым выпуском параллельно с упомянутой турбиной, и при этом турбонагнетатель включает в себя воздушный компрессор, приводимый в движение упомянутой турбиной и сообщающийся с впуском воздуха двигателя.
18. Способ по п. 17, в котором упомянутое требуемое положение привода основано на требуемом наддуве из упомянутого компрессора, который, в свою очередь, основан на требуемом выходном крутящем моменте двигателя.
19. Способ по п. 18, в котором клапан перемещается посредством упомянутого прикладывания тока к приводу, чтобы уменьшать разность между упомянутым требуемым наддувом компрессора и действующим давлением сжатого воздуха из упомянутого компрессора.
20. Способ по п. 18, в котором упомянутый требуемый выходной крутящий момент основан на требуемом водителем крутящем моменте.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 5226401 A, 13.07.1993 | |||
| УСТРОЙСТВО ДЛЯ ПЕРЕПУСКА ОТРАБОТАВШИХ ГАЗОВ В ДВУХТОПЛИВНОМ ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ С ГАЗОТУРБИННЫМ НАДДУВОМ | 1998 |
|
RU2168643C2 |

