ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к системе генерации и/или преобразования энергии для преобразования механической энергии в электрическую энергию.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Одним примером такой системы, посредством которой механическая энергия может быть преобразована в электрическую энергию, является трибоэлектрическая система генерации энергии. Трибоэлектрический эффект (также известный как трибоэлектризация) является индуцируемой в результате контакта электризацией, в которой материал становится электрически заряженным после его контакта с другим материалом посредством трения. Трибоэлектрическая генерация основана на преобразовании механической энергии в электрическую энергию с помощью способов, которые соединяют трибоэлектрический эффект с электростатической индукцией. Было предложено использовать трибоэлектрическую генерацию для питания носимых устройств, таких как датчики и смартфоны, путем захвата в противном случае растрачиваемой впустую механической энергии из таких источников, как хождение, случайные движения тела, дуновение ветра, колебательные или океанские волны (см., например: Wang, Sihong, Long Lin, and Zhong Lin Wang "Triboelectric nanogenerators as self-powered active sensors." Nano Energy 11 (2015): 436-462).
Трибоэлектрический эффект основан на последовательности, которая ранжирует различные материалы в соответствии с их склонностью получать электроны (становиться отрицательно заряженными) или терять электроны (становиться положительно заряженными). Эта последовательность, например, приведена в A.F. Diaz and R.M. Felix-Navarro, A semi-quantitative tribo-electric series for polymeric materials: the influence of chemical structure and properties, Journal of Electrostatics 62 (2004) 277-290. Наилучшими комбинациями материалов для создания статического электричества являются один материал из списка с положительным зарядом и один от списка с отрицательным зарядом (например, ПолиТетраФторЭтилен (PTFE) в паре с медью или фторированный этилен-пропилен (FEP) в паре с алюминием). Натирание стекла мехом или гребня через волосы являются известными примерами трибоэлектричества из повседневной жизни.
В своей простейшей форме трибоэлектрический генератор использует два листа различных материалов, один является донором электронов, другой акцептором электронов. Когда материалы приводятся в контакт, происходит обмен электронами от одного материала к другому. Это является просто трибоэлектрическим эффектом. Если листы затем разделяются, каждый лист содержит электрический заряд (различной полярности), изолированный зазором между ними, и создается электрический потенциал. Если электрическая нагрузка подключается между электродами, расположенными на задней стороне поверхностей двух материалов, любое дальнейшем смещение листов, как в поперечном, так и в перпендикулярном направлении, будет индуцировать в ответ электрический ток между этими двумя электродами. Это является просто примером электростатической индукции. Поскольку расстояние между соответствующими центрами зарядов двух пластин увеличивается, то электрическое поле притяжения между ними через зазор ослабляется, что приводит к увеличению разности потенциалов между этими двумя внешними электродами, поскольку электрическое притяжение зарядов через нагрузку начинает превышать электростатическую силу притяжения через зазор.
Таким образом, трибоэлектрические генераторы преобразуют механическую энергию в электрическую энергию посредством связи между двумя главными физическими механизмами: контактной электризацией (трибоэлектризацией) и электростатической индукцией.
Путем циклического увеличения и уменьшения взаимного расстояния между центрами заряда пластин в ответ может быть индуцировано протекание тока вперед и назад между пластинами, таким образом генерируя переменный ток через загрузку. Выходная мощность может быть увеличена путем нанесения рельефа микронного размера на полимерные листы. Формирование рельефа эффективно увеличивает поверхность соприкосновения и, таким образом, увеличивает эффективность переноса заряда.
Недавно была разработана перспективная технология для генерации энергии (получения энергии) и преобразования энергии, которая использует этот эффект, как описано в Wang Z. L. "Triboelectric nanogenerators as new energy technology for self-powered systems and as active mechanical and chemical sensors." ACS nano 7.11 (2013): 9533-9557. На основе этого эффекта было разработано несколько конфигураций устройств так называемых трибоэлектрических наногенераторов ("TENG"). С момента их первого представления в 2012 была значительно улучшена выходная плотность мощности TENG. Объемная плотность мощности может достигать более чем 400 киловатт на кубический метр, и была продемонстрирована эффективность ~60% (ibid.). В дополнение к высокой производительности технология TENG имеет множество других преимуществ, таких как низкая стоимость изготовления, высокая надежность и прочность, слабое воздействие на окружающую среду. TENG может использоваться в качестве генератора электрической энергии, то есть энергии, получаемой, например, от колебаний, ветра, воды, случайных движений тела или даже преобразования механически доступной энергии в электричество.
TENG можно в общем поделить на четыре основных операционных класса, один из которых функционирует в так называемом режиме линейного скольжения, в котором индуцируется скольжение заряженных пластин в поперечном направлении относительно друг друга для изменения области перекрытия между ними. Между пластинами индуцируется разность потенциалов, имеющая мгновенную величину, пропорциональную скорости изменения полной зоны перекрытия. Путем многократного приведения пластин в и из состояния взаимного перекрытия друг с другом может быть обеспечен переменный ток через нагрузку, соединенную между пластинами.
Одним из подмножеств TENG с режимом линейного скольжения являются TENG с вращающимися дисками, который может работать как в контактном режиме (то есть непрерывной трибоэлектризации и электростатической индукции), так и бесконтактном режиме (то есть только электростатической индукции после начальной контактной электризации). TENG с вращающимися дисками обычно состоят по меньшей мере из одного ротора и одного статора, каждый из которых сформирован как набор расположенных на расстоянии круговых секторов (сегментов). Сектора перекрываются и затем разделяются по мере того, как эти два диска вращаются относительно друг друга. Как было описано выше, может быть индуцирован ток между двумя скользящими в поперечном направлении - противоположно заряженными - слоями с величиной, пропорциональной скорости изменения области перекрытия. Когда каждый последовательно расположенный сектор ротора входит и затем выходит из перекрытия с данным сектором статора, между двумя пластинами секторов индуцируется ток, вначале в первом направлении, по мере того, как увеличивается перекрытие пластин, а затем в противоположном направлении, по мере того, как перекрытие пластин уменьшается.
Ограничения ранних версий TENG с сегментно-структурированными дисками (Long Lin et al., Segmentally Structured Disk Triboelectric Nanogenerator for Harvesting Rotational Mechanical Energy, Nano Lett., 2013, 13 (6), pp 2916-2923) состояли в том, что вращающиеся и стационарные трибоэлектрические слои требовали нанесения металлических электродов и соединения с электрическими проводами, что приводило к неудобной работе вращающейся части.
TENG с дисками, в котором обе группы электродов с рельефом прикреплены к стационарному диску, и в котором имеется свободный трибоэлектрический слой на вращающемся диске, может решить эти проблемы, как описано в Long Lin et al., Noncontact Free-Rotating Disk Triboelectric Nanogenerator as a Sustainable Energy Harvester and Self-Powered Mechanical Sensor. ACS Appl. Mater. Interfaces, 2014, 6 (4), pp 3031-3038. С такой структурой отсутствует необходимость в нанесении электродов или электрического соединения на вращающиеся части, что существенно улучшает операционные возможности устройства получения энергии.
TENG с вращающимися дисками и TENG с режимом линейного скольжения вообще могут эксплуатироваться как в контактном режиме, так и в бесконтактном режиме. Хотя контакт желателен для трибоэлекризации пластин (как первоначальной, так и последующей для противодействия утечкам), сам процесс электростатической индукции (с помощью которого генерируется электроэнергия) не требует контакта между пластинами, но хорошо работает с небольшим расстоянием между пластинами (например, приблизительно 0.5 мм).
Работа в контактном режиме, в котором пластины удерживаются в непрерывном фрикционном контакте, приводит к более высокой выходной мощности, так как пластины непрерывно заряжаются и, следовательно, непрерывно поддерживают некоторую теоретически максимальную емкость заряда (определяемую емкостью системы из двух пластин) путем непрерывной замены заряда, потерянного через утечки и т.д. Чем больше заряд, который может поддерживаться на пластинах, тем больше электростатический индуктивный выход, который может генерироваться, так как, естественно, большая плотность заряда индуцирует большую электростатическую силу между электронами в пластинах.
Однако работа в контактном режиме приводит к различным трудностям, в том числе к созданию излишнего шума и износу материалов устройства в результате износа поверхностей, а также потерям энергии из-за необходимости преодолевать трение между пластинами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей этого изобретения, среди прочего, является уменьшение одной или нескольких из упомянутых выше трудностей. Эта задача достигается с помощью изобретения, определенного в независимых пунктах формулы изобретения. Зависимые пункты формулы изобретения обеспечивают предпочтительные варианты воплощения.
Таким образом, изобретение обеспечивает систему и способ генерации электрической энергии, с помощью которых можно увеличить или оптимизировать выходную мощность, при этом уменьшив эффекты, связанные с одной из упомянутых выше трудностей. Это достигается с помощью режима работы устройства, в котором есть режим генерации энергии, в котором отсутствует контакт между движущимися относительно друг друга элементами, несущими заряд, для генерации электрической энергии, и режим зарядки, в котором имеется контакт между движущимися элементами для пополнения какого-либо заряда, потерянного во время режима генерации энергии.
В зависимости от скорости, с которой происходит утечка заряда в режиме генерации энергии, режим зарядки может быть уменьшен по времени, тем самым увеличивая эффект уменьшения любого из эффектов, связанных с любой из трудностей.
Режимы могут чередоваться с течением времени для периодической подзарядки движущихся частей. Таким образом, изобретение позволяет поддерживать выходную мощность равной или выше некоторого желаемого порога для реализации конкретной желаемой выходной мощности, например, путем периодической подзарядки, при этом избегая или уменьшая проблемы шума и/или износа поверхностей, связанные с работой генератора в контактном режиме.
В этом изобретении генерация энергии означает генерацию электрического сигнала. Такой электрический сигнал является сигналом напряжения или сигналом тока, что является обычным для определения электрической энергии.
Состояние зарядки, существующее между двумя элементами, может означать, что только один из элементов: первый элемент или второй элемент содержит электрический заряд, или что оба содержат неравный электрический заряд одинаковой полярности. Может быть предпочтительным, чтобы оба элемента содержали по существу одинаковый электрический заряд, но противоположной полярности. Любое состояние зарядки, которое может приводить (отвечать за) к выработке энергии генератором электрической энергии при взаимном движение элементов, будет работать с этим изобретением.
Генератор электрической энергии может содержать трибоэлектрический генератор энергии, в котором первый и второй элементы содержат первую и вторую пластины трибоэлектрического генератора. В этих примерах изобретение, таким образом, может обеспечивать систему для трибоэлектрической генерации, в которой режим работы генератора может периодически переключаться между контактным режимом, во время которого одна или обе пластины трибоэлектризуются, и бесконтактным режимом, во время которого энергия генерируется (или преобразовывается) посредством электростатической индукции. В этом случае изменение состояния зарядки включает в себя увеличение состояния зарядки. Однако в других иллюстративных вариантах осуществления изменение состояния зарядки может включать в себя уменьшение состояния зарядки.
Контроллер может управлять моментом и/или продолжительностью режима зарядки (контактной фазы) и режима генерации энергии (бесконтактной фазы). Управление осуществляется в зависимости от обнаруженного состояния зарядки пластин. С этой целью система, например, с помощью контроллера может выводить информацию о состоянии зарядки для использования в управлении этими двумя режимами работы (которое может быть ручным). Дополнительно или альтернативно, система может использовать эту информацию о состоянии заряда непосредственно для управления моментами и/или продолжительностью режимов работы. В любом или в обоих случаях, когда заряд на пластинах падает ниже определенного порога, может быть активирован режим зарядки. Например, контроллер может автоматически или с подачи пользователя управлять приводным механизмом для приведения в контакт пластин, тем самым инициации контактного режима (или фазы режима зарядки). Режим зарядки может иметь фиксированную продолжительность или может останавливаться, как только заряд на пластинах опять превысил конкретный порог. Например, контроллер автоматически или с подачи пользователя может управлять приводом для разделения двух пластин, тем самым инициируя бесконтактный режим (или режим генерации энергии). Этот процесс периодической работы системы в режиме генерации энергии и режиме зарядки может повторяться снова и снова, при этом между пластинами периодически устанавливается и затем прекращается контакт, в зависимости от состояния заряда пластин.
Моменты этих двух режимов работы (контактного и бесконтактного) могут быть оптимизированы для обеспечения поддержания конкретного минимального заряда пластин для реализации конкретной желаемой выходной мощности, например, при минимизации общего времени контакта между пластинами. Таким образом шум и износ поверхностей могут быть минимизированы, при этом гарантируя, что выходная мощность не падает ниже желаемого минимального уровня. Таким образом, в пределах промежутка времени, содержащего по меньшей мере один период режима генерации энергии и (последующий) период режима зарядки (или наоборот), период зарядки предпочтительно занимает процент от промежутка времени, равный или меньше 50%, 40%, 30%, 20%, 10%, 10%, 5%, 1%, 0.1%. Чем ниже процент, тем сильнее любой из эффектов описанных трудностей может быть уменьшен. Процент может быть фиксированным для промежутка времени, но также может быть настраиваемым между или во время работы системы. Если состояние зарядки периодически измеряется, то периоды режимов и время начала и и/или окончания режимов могут периодически регулироваться на основании последнего измеренного состояния зарядки.
Система содержит устройство для определения состояния зарядки. Контроллер может содержать схему сравнения для приема выходного напряжения нагрузки генератора. Выходная мощность и выходное напряжение генератора TENG, например, будет уменьшаться по мере того, как происходит утечка заряда пластин в (бесконтактной фазе) период, следующий за процессом зарядки (трибоэлектризации). Следовательно, состояние заряда может оцениваться путем отслеживания выходного сигнала (либо выходного напряжения, тока, либо выходной мощности) как функции времени. Поэтому схема сравнения может использоваться для сравнения, например, мгновенного выходного электрического сигнала с некоторым опорным значением и генерации в ответ выходного сигнала.
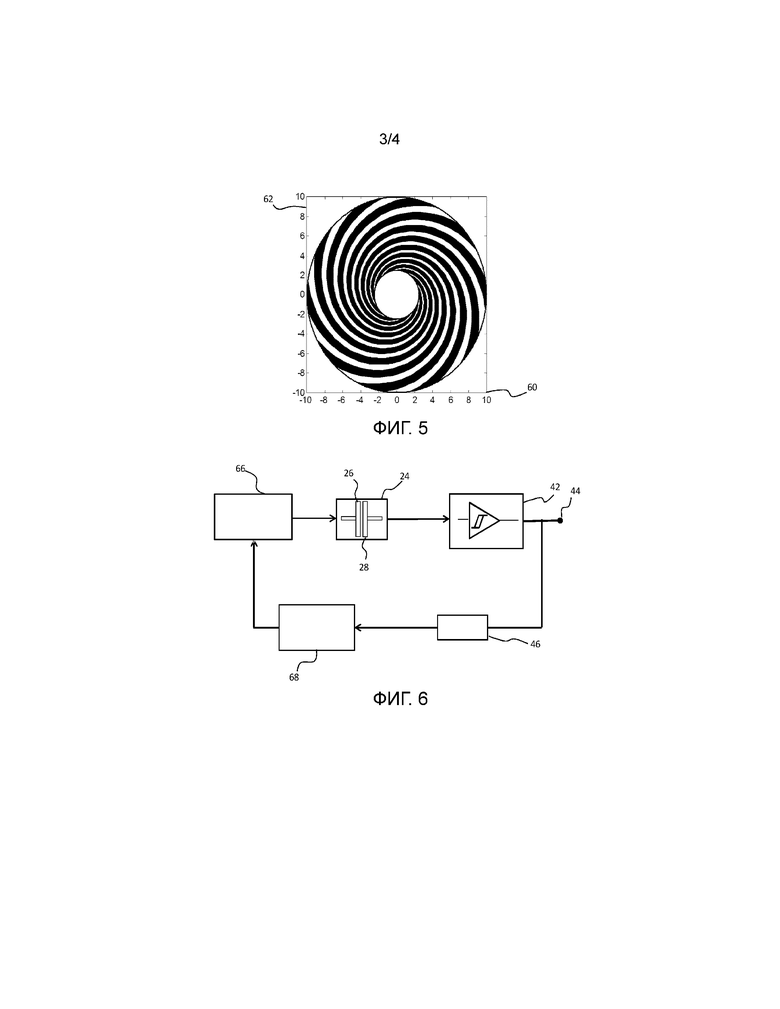
Схема сравнения может содержать, например, схему триггера Шмитта. Схема триггера Шмитта может быть выполнена с возможностью активации новой фазы зарядки в ответ на падение выходного сигнала генератора (напряжения, тока или мощности) ниже данного первого (нижнего) порогового уровня и последующего завершения фазы зарядки в ответ на повышение выходного сигнала генератора (напряжения, тока или мощности) выше данного второго (верхнего) порогового уровня.
Для обеспечения подвижности первого и второго элемента они могут быть выполнены с возможностью вращения относительно друг друга с относительной скоростью вращения вокруг мнимой оси вращения. Первый и второй элементы могут содержать первый и второй дисковые элементы, вращающиеся относительно друг друга. Таким образом, может иметься мнимая ось вращения, вокруг которой вращается по меньшей мере один из элементов. В этом случае электрический генератор может содержать TENG с вращающимися дисками, в котором первый и второй элементы (то есть пластины) имеют поверхности, которые обращены друг к другу. Поверхности могут нести заряд для создания состояний зарядки. Элементы могут, например, состоять из (по меньшей мере) одного ротора и одного статора, каждый из которых сформирован как набор расположенных на некотором расстоянии секторов круга.
В некоторых примерах предыдущего абзаца приводной механизм может содержать механизм, который выполнен с возможностью создания и/или поддержания расстояния между первым элементом и вторым элементом, где расстояние может измеряться вдоль мнимой оси вращения. Предпочтительно этот механизм дополнительно выполнен с возможностью создания и/или поддержания расстояния путем дополнительного конфигурирования таким образом, что расстояние зависит от относительного вращения первого элемента и второго элемента. В частности, первый элемент и второй элемент могут иметь один или несколько топографических особенностей со спиральным рельефом, сформированные на поверхности(ях) первого дискового элемента (26) и/или второго дискового элемента (28). Топографические особенности со спиральным рельефом предназначены для создания расстояния, которое может измеряться вдоль мнимой оси. Гидродинамическая подъемная сила между первым и вторым элементами возникает в ответ на вращение. По мере того, как диски вращаются относительно друг друга, генерируются колебания в текучей среде (среде, в которой помещены диски (газообразной среде или жидкости)), так что пластины отталкиваются под действием силы, величина которой связана с относительной скоростью вращения. Если к дискам приложена, например, некоторая небольшая сила предварительного нагружения, толкающая пластины друг к другу, например, вес верхней пластины, если пластины расположены горизонтально, тогда увеличение частоты вращения будет приводить к пропорциональному увеличению расстояния между пластинами. Последующее замедление дисков приводит к последующему уменьшению расстояния между дисковыми элементами. Сила, толкающая пластины друг к другу, также может быть обеспечена с помощью пружинных приспособлений, таких как резиновые ленты, механические пружины, электромеханическое средство, магнитное средство и т.д.
Изобретение, таким образом, может использоваться в качестве системы для преобразования механической энергии в электрическую энергию. Следовательно, оно может использоваться в качестве устройства получения энергии. Альтернативно или в действительности в соответствии с любым из вышеупомянутых вариантов осуществления система может дополнительно содержать блок двигателя для генерации относительного движения между первым и вторым элементами. Таким образом, система способна, например, передавать электрическую энергию, генерируемую в одной части, с помощью двигателя в другую часть, удаленную от местоположения двигателя. Это может обеспечивать доступность электрической энергии в местах, для которых двигатели являются слишком большими, и/или другие способы обеспечения электрической энергии не подходят. В примерах блок двигателя может питаться одним или несколькими из множества источников энергии, таких как сгорание, электричество, аккумуляторы, топливные элементы, ядерная энергия или любой другой подходящий источник питания. Контроллер может в этом случае содержать схему контроллера двигателя, соединенную с блоком двигателя, для управления напряжением входного возбуждающего сигнала к блоку двигателя. Таким образом, система может точно управлять относительной скоростью дисковых элементов и, следовательно, расстоянием между элементами, например, в ответ на падение или повышение выходного напряжения генератора. В некоторых случаях, например, контроллер содержит схему сравнения, и выходной сигнал схемы сравнения может быть соединен с входом схемы блока управления двигателем, так что может активироваться регулировка частоты вращения двигателя между различными значениями в ответ на падение или увеличение выходного напряжения/мощности генератора ниже или выше определенных порогов.
Однако в других примерах блок двигателя для генерации относительного движения между пластинами генератора не может быть обеспечен в сочетании с приводным механизмом со спиральной опорой. Хотя расстоянием между пластинами нужно управлять в этом случае путем управления частотой вращения, основной привод двигателя генератора может содержать некоторый внешний механический источник (например, ветровую или гидротурбину и т.д.), и необходимы дополнительные мехатронные компоненты, дополнительно используемые для ограничения внешнего источника, например, путем обеспечения сопротивления. Таким образом, скорость может варьироваться между максимумом (когда не применяется никакое механическое сопротивление к внешнему источнику энергии двигателя) и минимумом (когда максимальная сила сопротивления применяется к источнику энергии двигателя).
В соответствии с этим или любым другим вариантом осуществления приводной механизм может содержать один или несколько мехатронных приводных элементов. Они могут включать в себя, в качестве неограничивающего примера, шаговые двигатели, винты с приводом от двигателя, управляемые электромагниты, гидравлические или пневматические затворы или клапаны. Они могут использоваться, а могут и не использоваться в сочетании с обеспеченным блоком двигателя для приведения в движение пластин, и могут использоваться, а могут и не использоваться в сочетании с вариантом осуществления со спиральной опорой, описанным выше. В некоторых случаях, например, не обеспечивается никакой спиральной опоры, и пластины приводятся в контакт и выводятся из контакта с помощью одних только мехатронных приводных элементов. Это может использоваться в сочетании с внешним источником физической энергии, таким как ветер или вода, или может использоваться в сочетании с обеспеченным блоком двигателя.
Контроллер может в этих случаях содержать схему управления мехатронным приводом, например, имеющего связь с помощью сигналов с контроллером. Схема управления мехатронным приводом предназначена для управления мехатронным приводным блоком.
Контроллер может содержать модуль пользовательского ввода для приема команд от пользователя. Команды могут задавать одно или несколько из: время начала, время окончания, период режима зарядки и/или режима генерации энергии, верхний порог сигнала выходной мощности, нижний порог сигнала выходной мощности, нижний порог состояния зарядки или верхний порог состояния зарядки. Контроллер может быть выполнен с возможностью управления моментом и/или продолжительностью контактной и бесконтактной фаз в ответ на упомянутые команды от пользователя. Может быть обеспечен модуль пользовательского ввода в сочетании с одним или несколькими из 'автоматизированных' вариантов осуществления управления, описанных выше, например, для обеспечения функциональности 'ручного управления', посредством которого пользователь может вмешаться во в ином случае автоматически регулируемую систему, чтобы вынудить систему использовать конкретный режим работы в определенное время. Альтернативно, система может быть полностью с ручным управлением, так что приводной механизм управляется полностью в ответ на ручные команды, принятые от пользователя.
В этих или любых других иллюстративных вариантах осуществления контроллер может содержать модуль пользовательского вывода для вывода пользователю информации для использования в ручном управлении моментом и/или продолжительностью режима зарядки. Следовательно, контроллер может обеспечивать просто интерфейс между системой и пользователем, позволяющий пользователю решать, когда система переключается между контактным и бесконтактным режимом, например, передавая информацию, касающуюся состояния заряда пластин или выходного напряжения/мощности генератора.
В соответствии с изобретением также обеспечен способ работы генератора (24, 52) электрической энергии для генерации электрической энергии. Функции, определенные для системы, также могут использоваться для модификации способа, и преимущества, определенные для системы, также применимы к модифицированному способу.
В вариантах осуществления способа первый и второй элементы могут приводиться в контакт в ответ на падение выходного напряжения генератора от уровня выше нижнего порога до уровня ниже упомянутого нижнего порога, и при этом первый и второй элементы выводятся из контакта в ответ на повышение выходного напряжения генератора от уровня ниже верхнего порога до уровня выше упомянутого верхнего порога.
Первый и второй элементы могут быть приведены в контакт и/или выведены из контакта посредством мехатронного управляющего элемента, такого как, в качестве неограничивающего примера, шаговый двигатель, винт с приводом от двигателя, управляемый электромагнит, гидравлические или пневматические затворы или клапаны.
В некоторых вариантах осуществления первый и второй элементы могут содержать первый и второй дисковые элементы, вращающиеся относительно друг друга, и по меньшей мере один из упомянутых дисковых элементов содержит топографические особенности со спиральным рельефом. В этом случае первый и второй элементы могут быть приведены в контакт и/или выведены из контакта друг с другом путем изменения относительной скорости вращения между этими двумя элементами, чтобы, таким образом, генерировать переменную гидродинамическую подъемную силу между этими двумя элементами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь будут подробно описаны примеры изобретения со ссылкой на прилагаемые схематические чертежи, на которых:
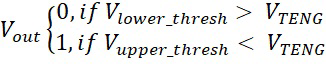
фиг. 1 показывает график, изображающий взаимосвязь между максимальной выходной мощностью и расстоянием между пластинами для иллюстративного трибоэлектрического генератора с вращающимися дисками;
фиг. 2 показывает график, изображающий взаимосвязь между удвоенной амплитудой выходного напряжения и расстоянием между пластинами для иллюстративного трибоэлектрического генератора с вращающимися дисками;
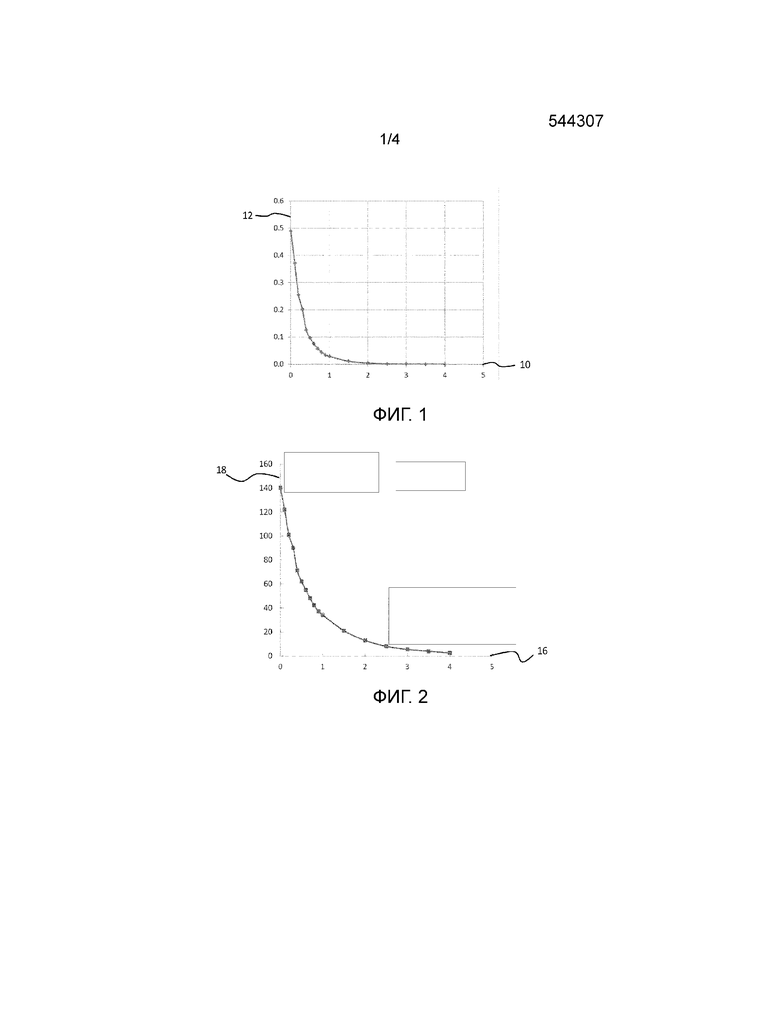
фиг. 3 показывает блок-схему иллюстративной конструкции для первой иллюстративной системы генерации и/или преобразования энергии, содержащей трибоэлектрический генератор;
фиг. 4 показывает блок-схему иллюстративной конструкции для второй иллюстративной системы генерации и/или преобразования энергии, содержащей трибоэлектрический генератор;
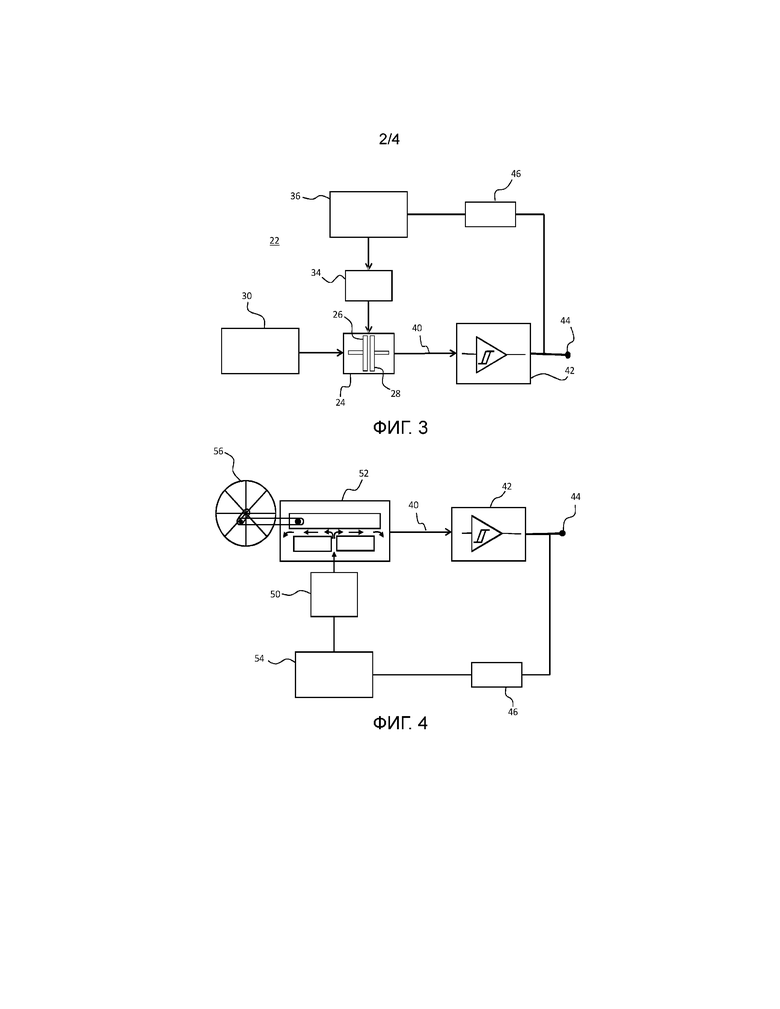
фиг. 5 показывает иллюстративный спиральный рельеф для иллюстративного трибоэлектрического генератора с вращающимися дисками, содержащего реактивную опору со спиральным пазом.
фиг. 6 показывает блок-схему иллюстративной конструкции для третьей иллюстративной системы, содержащей трибоэлектрический генератор;
фиг. 7 показывает блок-схему иллюстративной конструкции для четвертой иллюстративной системы, содержащей трибоэлектрический генератор.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение обеспечивает систему и способ генерации и/или преобразования энергии, в котором генератор электрической энергии управляется таким образом, чтобы периодически чередовались контактный режим, во время которого элементы генератора приводятся в контакт для индуцирования состояния зарядки, и бесконтактный режим, во время которого элементы генератора разделяются друг от друга, и генерируется электрическая энергия посредством электростатической индукции. Моменты и продолжительность контактного и бесконтактного режимов управляются с помощью контроллера или команд пользователя, в зависимости от состояния заряда элементов генератора. Таким образом, элементы приводят в контакт только тогда, когда поверхностный заряд упадет ниже определенного уровня и будет необходима зарядка; следовательно, может быть минимизировано время контакта между элементами, тем самым минимизированы шум и износ поверхностей, при этом по-прежнему поддерживаться данная желаемая пороговая выходная мощность.
В соответствии с одним конкретным набором вариантов осуществления электрический генератор может содержать трибоэлектрический генератор, в котором комбинация трибоэлектрического эффекта и электростатической индукции используется для получения или преобразования механической энергии в электрическую энергию. В конкретных примерах, описанных ниже, описываются варианты осуществления систем, содержащие, в частности, элементы трибоэлектрического генератора.
Трибоэлектрические генераторы могут работать в бесконтактном режиме, но они обеспечивают более высокую выходную мощность, если они также используют плотный контакт для трибоэлектризации. Однако работа в контактном режиме приводит к проблемам с шумом и сроком службы устройства (износ поверхностей).
Варианты осуществления настоящего изобретения предлагают решение, в котором генератор работает в периодическом или повторяющемся контактом режиме. Варианты осуществления обеспечивают режимы работы трибоэлектрических генераторов с периодическим, но коротким по времени контактом трибоэлектрических материалов. Частота повторяющегося/периодического контакта может регулироваться в зависимости от скорости утечки/потери заряда поверхностями. Кроме того, могут быть обеспечены подходы с приводными механизмами и обратной связью для ограничения частоты контактной зарядки (путем определении, когда поверхностный заряд был потерян) и продолжительности (путем указания, когда был сделан достаточный контакт) и, следовательно, максимизации периода бесконтактной генерации энергии с максимальным уровнем энергии. Иллюстративные варианты осуществления систем и способов управления, раскрытые ниже, описываются, в частности, в отношении трибоэлектрических генераторов с вращающимися дисками и совершающей возвратно-поступательное движение подвижной пластиной. Однако следует понимать, что эти конкретные примеры являются просто иллюстративными и приведенными в качестве примера, и специалистам в области техники будет понятно, что описанные способы и системы применимы к любому типу трибоэлектрического генератора.
Трибоэлектрические генераторы с вращающимся диском требуют периодического плотного контакта для трибоэлектризации (переноса заряда), но затем в идеале работают в бесконтактном режиме для преодоления проблем с шумом, трением и сроком службы устройства. Поэтому механизмы для установления бесконтактного режима (то есть разделения ротора и статора) и для последующего точного управления высотой зазора между пластинами являются двумя ключевыми трудностями в реализации периодического контактного режима работы. Точное управление высотой зазора особенно важно, так как расстояние между пластинами оказывает значительное влияние на генерируемое трибоэлектрическое напряжение и выходную мощность.
На фигуре 1 показан график, изображающий измеренную взаимосвязь между расстоянием между пластинами в мм (ось 10 X) и максимальной выходной мощностью в мВт (ось 12 Y) для иллюстративного TENG с вращающимися пластинами, содержащего ротор PTFE. Как обсуждалось выше, выходная мощность является наибольшей, когда пластины находятся в контакте (то есть расстояние между пластинами равно нулю), достигая пиковой мощности для иллюстративного ротора, равную для фигуры 1 приблизительно 0.5 мВт. По мере увеличения расстояние между пластинами, максимальная выходная мощность падает очень резко, расстояние в 0.5 мм приводит приблизительно к 80%-ому падению мощности, пиковая мощность падает до всего лишь 0.1 мВт. При расстоянии 2 мм выходная мощность падает практически до нуля.
Аналогично, фигура 2 изображает взаимосвязь для того же самого иллюстративного TENG между расстоянием между пластинами в мм (ось 16 X) и удвоенной амплитудой выходного напряжения в вольтах (ось 18 Y). Опять же, наблюдается резкое снижение в ответ на увеличение расстояния между пластинами, зазор в 0.5 мм приводит к уменьшению удвоенной амплитуды напряжения приблизительно на 75% (от ~140В до ~35В).
Следовательно, для эффективной работы желательно иметь приводные механизмы для приведения пластин в и из состояния разделения, которые способны к обеспечению очень точного управления разделительным расстоянием между пластинами.
В соответствии с простым первым вариантом осуществления системы преобразования энергии в соответствии с изобретением система содержит устройство TENG, имеющее пластины с регулируемым относительным смещением, один или несколько мехатронных управляющих элементов для обеспечения регулировки и/или фиксации относительного смещения пластин, и один или несколько элементов контроллера для управления мехатронными управляющими элементами в ответ на определенный уровень заряда или состояние пластин.
Фигура 3 показывает блок-схему одной иллюстративной конструкции для этой системы. В этом примере TENG 24 с вращающимися дисками показан с иллюстративными целями, но специалистам в области техники будет понятно, что конструкция в равной степени может быть применена к другим разновидностям TENG (как обсуждалось в предыдущих разделах). Ротор 26 TENG 24 функционально связан с механическим выводом механического приводного механизма 30. Приводной механизм обеспечивает входной источник кинетической или энергии двигателя, которая должна быть преобразована системой в электрическую энергию.
В некоторых конкретных примерах может использоваться TENG с вращающимися дисками, в котором статор 28 содержит последовательность наклонных (проводящих) электродов, в то время как ротор содержит свободный слой диэлектрического (неметаллического) материала. В соответствии с этой конструкцией единственным диском, несущим заряд, является диэлектрический слой статора, что дает особое преимущество, что емкость между пластинами является постоянной. Кроме того (как обсуждалось в Long Lin et al., Noncontact Free-Rotating Disk Triboelectric Nanogenerator as a Sustainable Energy Harvester and Self-Powered Mechanical Sensor. ACS Appl. Mater. Interfaces, 2014, 6 (4), pp 3031-3038), с такой структурой отсутствует необходимость в нанесении электрода или электрического соединения для вращающейся части, что существенно улучшает операционные возможности генератора.
Приводной механизм 30 (или источник энергии двигателя) может в некоторых вариантах осуществления содержать 'внешний' источник, такой как, например, турбину, приводимую в движение ветром или водой, источник колебательной энергии или приводимый в движение человеком источник событий двигателя. В этом случае система 22 может функционировать как система 'получения' энергии, в которой генерируемая вне энергия, в противном случае теряемая, улавливается и преобразовывается в источник электрической энергии. Однако, в соответствии с альтернативными вариантами осуществления, источник энергии может содержать источник, являющийся 'внутренним' относительно самой системы, такой как, например, блок двигателя. Блок двигателя может питаться от различных источников энергии, таких как горение, электричество, аккумуляторы, топливные элементы, пружины часовых механизмов, гравитация, ядерная энергия и т.д. В этом случае система 22 может обеспечивать просто функциональность преобразования энергии.
С одной или обеими пластинами 26, 28 TENG 24 функционально связан мехатронный приводной элемент 34 разделения пластин, который управляется мехатронной управляющей схемой 36. С электрическим выходом 40 устройства 24 TENG соединена схема 42 триггера Шмитта, выход которой соединен с точкой 44 подключения Vout, а также с сигнальным входом релейного выключателя 46. Схема 42 триггера Шмитта выступает в качестве контроллера для системы 22, управляющего, совместно с релейным выключателем 46, активацией мехатронных элементов 34, 36 и, следовательно, моментами и продолжительностью контактной и бесконтактной фаз пластин. Перемещение пластин между контактным и бесконтактным режимами управляется с помощью схемы 42 триггера Шмитта в ответ на выходное напряжение 40 генератора. Например, схема триггера Шмитта может быть выполнена с возможностью оценки начального уровня выходного напряжения/мощности генератора, отслеживания уменьшения выходной мощности/напряжения и переключения его выходного сигнала с высокого уровня выходного сигнала на низкий уровень выходного сигнала, чтобы указать, что было потеряно достаточное количество поверхностного заряда, чтобы требовать начала новой фазы трибоэлектризации. В ответ реле 46, соединенное с выходом 42 схемы триггера Шмитта, может быть соответственно переключено с высокого на низкий уровень выхода сигнала. Мехатронная управляющая схема 36 может быть выполнена с возможностью отвечать на переключение реле 46 с высокого на низкий уровень путем активации мехатронного приводного элемента 34 для перемещения пластин 26, 28 TENG в положение контактного режима.
Следует отметить, что релейная схема не является существенной, так что в некоторых примерах схема 42 триггера Шмитта может быть соединена непосредственно с мехатронной управляющей схемой 36, без необходимости в релейной схеме между ними.
В некоторых примерах выход схемы 42 триггера Шмитта может быть выполнен с возможностью переключения с высокого на низкий уровень - и, тем самым, активации инициирования управляющей схемой 36 фазы контактного режима - в ответ на падение выходного напряжения VTENG 40 ниже данного (первого) нижнего порогового уровня Vlower_thresh. В альтернативных примерах схема 42 триггера Шмитта может быть выполнена с возможностью активации фазы контактного режима в ответ на падение отношения (мгновенной) выходной мощности или напряжения к начальной выходной мощности или напряжению ниже данного порогового уровня.
Кроме того, как только был запущен процесс трибоэлектризации, управляющая электроника (то есть схема триггера Шмитта в этом случае) может быть дополнительно выполнена с возможностью отслеживания увеличения выходного напряжения/мощности по мере зарядки пластин и переключения ее выхода с низкого уровня выходного сигнала на высокий уровень выходного сигнала, чтобы указать, что был получен достаточный поверхностный заряд для инициирования новой фазы режима трибогенерации (бесконтактного режима). В ответ реле 46 может быть соответственно переключено с низкого на высокий уровень выхода сигнала. Мехатронная управляющая схема 36 может быть выполнена с возможностью ответа на переключение реле 46 с низкого на высокий уровень путем запуска перемещения мехатронным приводным элементом 34 пластин 26, 28 TENG в положение бесконтактного режима (режима генерации).
В качестве неограничивающей иллюстрации схема триггера Шмитта, в соответствии с описанным выше примером, может быть выполнена с возможностью генерации следующих выходных сигналов:
Первое условие (Vout=0) инициирует контактный режим, а второе условие (Vout=1) инициирует бесконтактный режим.
В этом варианте осуществления контроллер управляет приводным механизмом, по существу, для поддержания заряда на пластинах в пределах некоторого заданного диапазона значений между некоторым заданным максимумом, который при достижении во время зарядки запускает окончание зарядки, и некоторым заданным минимумом, который при достижении во время генерации запускает инициирование зарядки. Следовательно, выходная мощность аналогично удерживается в пределах некоторого диапазона значений между максимумом, когда зарядка максимальна, и минимумом, когда зарядка минимальна. Контакт между пластинами ограничивается лишь минимумом, требуемым для поддержания порогового диапазона заряда.
Этот диапазон может быть задан как относительно маленький или большой. Если задан относительно маленький диапазон, фазы зарядки запускаются более часто, но имеют меньшую продолжительность. Когда задан большой диапазон, фазы зарядки происходят менее часто, но имеют каждый раз большую продолжительность. Эти факторы, например, могут оказывать влияние на износ поверхности.
Для мехатронного приводного элемента 34 разделения пластин существуют различные возможности. В некоторых примерах может использоваться простой шаговый двигатель для приведения в движение пластин между различными взаимными положениями. Например, приводной элемент 34 может содержать шаговый двигатель, функционально связанный только с одной из двух пластин 26, 28. Другая пластина удерживается в фиксированном абсолютном (аксиальном) положении, и расстояние между пластинами изменяется посредством движения шагового двигателя, прикрепленного к первой пластине, между его различными шагами. Положения контактного и бесконтактного режима могут содержать два соседних шага двигателя, или могут быть разделены множеством шагов двигателя. В альтернативных примерах приводной элемент разделения пластин может содержать винт с приводом от двигателя. Здесь резьбовой стержень (шпиндель) с помощью резьбы присоединяется к ротору, статору или к ним обоим. Регулировка расстояния между пластинами может быть достигнута в этой конструкции посредством использования части приводного источника 30 вращательной энергии для поворота пластины вокруг шпинделя, тем самым преобразования вращательного движения в линейное движение относительно стержня. Мелкий шаг резьбы, например, может обеспечить очень точную регулировку расположения пластин. Обратная связь по определению положения может быть достигнута с помощью, например, оптического кодового датчика положения вала на шпинделе; и путем инвертирования тока двигателя мехатронного приводного элемента разделения пластин может быть установлен циклический контактный/бесконтактный режим.
В некоторых примерах может использоваться управляемый электромагнит для притягивания ротора 26 и статора 28 друг к другу. В этом случае отслеживание тока в электромагните может являться частью обратной связи и механизма управления для мехатронной управляющей схемы 36. Для роторов, сделанных из немагнитных материалов, таких как алюминий, может использоваться постоянный магнит с генерацией силы притяжения между дисками с помощью вихревых токов. Разделительное расстояние тогда может регулироваться с помощью скорости вращения генератора. Однако, когда скорость вращения должна быть постоянной в TENG, или в вариантах осуществления, в которых система не управляет скоростью вращения (например, когда источник 30 энергии двигателя является внешним источником), может использоваться управляемый электромагнит.
В соответствии с одним или несколькими иллюстративными вариантами осуществления разделение между пластинами может осуществляться с помощью привода, использующего слои материала из EAP (электроактивного полимера) и/или SMM (материала с памятью формы) или любого другого чувствительного материала, способного служить механическим приводом.
В некоторых вариантах осуществления механизм разделения пластин может содержать пневматический подпружиненный 'клапан', в котором пластины упруго прижимаются вместе (например, с помощью пружины), а между ротором и статором подается сжатый воздух, тем самым обеспечивая разделение между пластинами, имеющее расстояние, пропорциональное или иным образом зависящее от давления поданного воздуха. Реактивная сила, обеспечиваемая пружиной, может использоваться в качестве автоматического обратного механизма для индуцирования контактного режима, как только подача воздуха останавливается или уменьшается. В соответствии с этим или другими вариантами осуществления могут использоваться затворы или клапаны, управляемые, например, гидравлически или пневматически для управления расходом (и, следовательно, подаваемым давлением) подаваемого воздуха.
Фигура 4 изображает одну иллюстративную конструкцию, содержащую пневматический приводной механизм 50 на сжатом воздухе совместно с TENG 52 с совершающей возвратно-поступательное движение подвижной пластиной. Пневматический приводной механизм подает сжатый воздух между пластинами TENG, тем самым обеспечивая воздушную опору, поддерживающую относительное разделение пластин в противодействии некоторому противостоящему сжимающему усилию (обеспечиваемому, например, пружиной или, альтернативно, гравитацией). В соответствии с этим примером, движение скольжения в поперечном направлении между пластинами генерируется внешним механическим приводным механизмом 56, содержащим ветровую или гидротурбину, связанная с возможностью взаимодействия с верхней (скользящей) пластиной TENG 52. Как и в примере фигуры 3, схема триггера Шмитта управляет моментами и продолжительностью фаз контактного и бесконтактного режимов в ответ на значение выходного напряжения TENG 40, переключаясь на низкий уровень выходного сигнала, когда должен быть инициирован режим зарядки (контактный режим), и на высокий уровень выходного сигнала, когда должен быть инициирован режим генерации (бесконтактный режим). Эти высокий и низкий уровни выходного сигнала вызывают генерацию реле 46 соответствующих высокого и низкого уровней выхода сигнала, в ответ на которые пневматический управляющий элемент 54 выполнен с возможностью управления пневматическим приводом 50 для изменения давления/расхода подаваемого воздуха между пластинами TENG между высоким давлением (бесконтактный режим) и низким давлением (контактный режим).
Качестве неограничивающей иллюстрации схема триггера Шмитта, в соответствии с описанным выше примером, может быть выполнена с возможностью генерации следующих выходных сигналов:
Первое условие (Vout=0) инициирует контактный режим, а второе условие (Vout=1) инициирует бесконтактный режим.
В некоторых примерах этой конструкции пневматический приводной элемент 50 управляет расходом воздуха и, следовательно, переключает между бесконтактными и контактными режимами с помощью пневматического клапана.
Использование воздуха для обеспечения опоры для поддержки разделения между пластинами может быть особенно желательным, так как это позволяет избежать необходимость в частях, имеющих механический жесткий контакт с пластинами для манипулирования ими. Это, в свою очередь, позволяет избежать или уменьшить ненужный износ или деформацию материалов, увеличивая срок службы и/или эффективность устройства TENG и/или компонентов привода. Кроме того, воздушная опора может уменьшить количество механических компонентов в пределах всего устройства, устраняя потенциальные источники неисправностей. Также воздушная опора может быть энергетически более эффективной, так как имеется небольшое сопротивление трения из-за механических соединений между стыками/частями.
В соответствии с одним конкретным вариантом осуществления для системы может быть обеспечена саморегулирующуюся реактивная опора для высокоточного управления зазором посредством использования движения самих пластин для генерации источника гидродинамической подъемной силы. В соответствии с этим примером, обеспечивается спиральный рельеф на обращенных вовнутрь поверхностях пластин TENG с вращающимися дисками, так что когда пластины вращаются, рельеф генерирует тонкий слой сжатого воздуха в пространстве между пластинами, генерируя силу, которая отталкивает пластины друг от друга. Фигура 5 изображает один пример спирального рельефа, который может быть обеспечен на пластинах TENG, при этом оси x (60) и y (62) представляют собой, соответственно, значения ширины и длины в мм (то есть обозначают диаметр дисков в мм). Спиральный рельеф может быть отпечатан (или выгравирован, нанесен лазером или сформирован любым другим подходящим средством, как будет понятно специалисту в области техники) на статоре, роторе или на них обоих.
Величина генерируемой гидродинамической силы связана со скоростью вращения, так что более быстро вращающиеся пластины индуцируют большую величину силы. Пластины могут подвергаться действию некоторой (небольшой) направленной внутрь силы смещения, толкающей пластины друг к другу, например, такой, что увеличения и уменьшения скорости пластины - и, следовательно, подъемной силы - приводят к устойчивым увеличениям и уменьшениям расстояния между пластинами. В этом случае движение самих пластин TENG непосредственно приводит к регулировке расстояния между пластинами в виде их сближением и разведения. Таким образом можно очень точно управлять расстоянием между пластинами.
Фигура 6 показывает блок-схему одной иллюстративной конструкции для системы, включающей в себя саморегулирующуюся спиральную воздушную опору, описанную выше.
В этом примере механическое движение роторного диска 26 относительно диска 28 статора обеспечивается блоком 66 двигателя, скоростью которого можно непосредственно управлять на уровне источника через схему 68 блока управления двигателем.
Однако в других примерах вместо этого может быть обеспечен источник механического движения с помощью 'внешнего' механического источника, такого как, например, ветер или вода, как в примере фигуры 4. В этом случае скоростью пластин невозможно управлять 'на уровне источника', но можно управлять, например, посредством использования одного или нескольких дополнительных приводных элементов, которые могут обеспечить некоторое механическое сопротивление входу двигателя источника, чтобы, таким образом, ограничивать скорость вращения. Максимальная скорость будет в этом случае все также определяться источником энергии двигателя, но путем выборочного применения сопротивления механическому выходу этого источника можно управлять скоростью передачи энергии в TENG.
Как и в ранее описанных вариантах осуществления конструкция фигуры 6 содержит схему 42 триггера Шмитта, на вход которой подается выходное напряжение VTENG генератора 24, и выход которой соединен с выходной точкой 44 подключения нагрузки и с релейным выключателем 46. В некоторых примерах схема триггера Шмитта может быть выполнена с возможностью генерации низкого уровня выходного сигнала в ответ на определение, что выход TENG упал ниже нижнего порога Vlower_thresh, и генерации высокого уровня выходного сигнала в ответ на определение, что выход TENG увеличился до верхнего порогового значения Vupper_thresh. Схема 68 блока управления двигателем может быть выполнена с возможностью ответа на низкий уровень сигнала от реле 46, указывающий, что должна быть инициирована фаза контактного режима (зарядки), путем уменьшения числа оборотов в минуту блока 66 двигателя, тем самым уменьшения подъемной силы между ротором и статором и приведения в контакт друг с другом этих двух пластин. Как только заряд на пластинах был восстановлен, и внешнее напряжение опять превышает Vupper_thresh, схема 42 триггера Шмитта через реле 46 запускает схему 68 блока управления двигателем, чтобы опять увеличить число оборотов в минуту блока двигателя, тем самым увеличивая подъемную силу между пластинами и восстанавливая фазу бесконтактного режима.
В описанных выше вариантах осуществления используется изменение выходного напряжения генератора для определения моментов и/или продолжительности фаз контактного (зарядки) и бесконтактного (генерации) режимов. В пределах этих или любых других вариантов осуществления изобретения также может быть желательно, чтобы контроллер определял, когда установлен и был ли установлен контакт между пластинами. Эта информация может использоваться для обеспечения обратной связи в режиме реального времени для приводного механизма, механически управляющего расстоянием между пластинами.
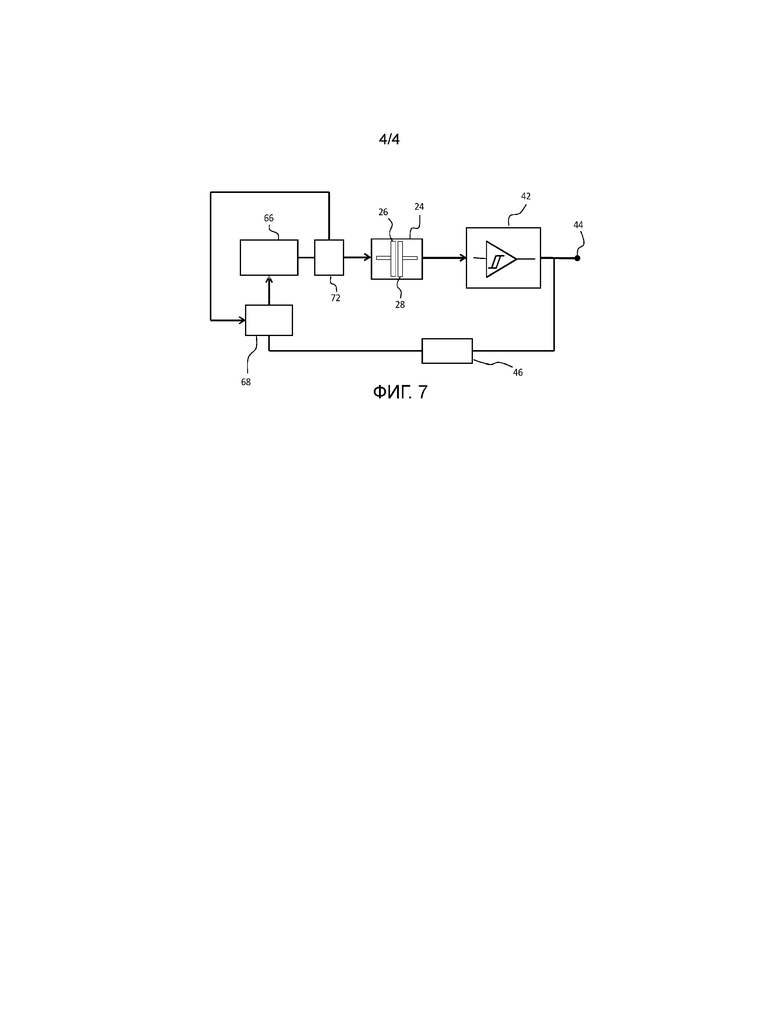
В зависимости от приводного механизма разделения пластин информация о контакте пластин может использоваться системой по-разному. Фигура 7 показывает блок-схему одной иллюстративной конструкции системы, включающей в себя сенсорный элемент 72 для определения, когда установлен и был ли установлен контакт между пластинами TENG 24. Генератор 24 в этом случае является генератором с вращающейся пластиной, включающим в себя привод со спиральной воздушной опорой варианта осуществления, описанного выше. В этом случае расстояние между пластинами генератора определяется скоростью вращения блока 66 двигателя. Когда должен быть инициирован контактный режим (режим зарядки), схема 68 блока управления двигателем медленно уменьшает скорость двигателя до уровня, когда эффект левитации только что прекратился. Начальный контакт между пластинами может обнаруживаться сенсорным элементом 72, и с этого момента скорость вращения двигателя в оборотах в минуту может удерживаться постоянной, тем самым удерживая пластины в состоянии с минимальной величиной контакта. Это позволяет трибозарядам накапливаться до тех пор, пока не будет достигнуто верхнее пороговое напряжение Vupper_thresh. В этот момент выходное напряжение схемы 42 триггера Шмитта переключается с низкого на высокий уровень, и блок управления приводом активируется с помощью реле 46 и опять начинает увеличивать число оборотов в минуту двигателя, чтобы тем самым повторно инициировать бесконтактный режим (режим генерации).
Сенсорный элемент 72 в этом случае не определяет ни момент, ни продолжительность фаз контактного и бесконтактного режимов, это, как и в варианте осуществления фигуры 6, определяется с помощью схемы 42 триггера Шмитта (то есть системным контроллером), который активирует схему блока управления двигателем, чтобы либо начать уменьшение скорости вращения двигателя, либо начинать увеличение скорости вращения двигателя в ответ на достижение либо минимального, либо максимального порога выходного напряжения, соответственно. Сенсорный элемент 72 скорее просто помогает схеме 68 блока управления двигателем в определении, когда прекратить уменьшение скорости вращения двигателя и удерживать число оборотов в минуту двигателя постоянным. Нежелательно при инициации контактного режима полностью останавливать двигатель, так как зарядка наиболее эффективна, когда имеется некоторое трение между пластинами. Следовательно, сенсорный элемент 72 позволяет уменьшить скорость вращения двигателя именно до нужного уровня, чтобы обеспечить устойчивый фрикционный контакт между все еще движущимися пластинами.
Сенсорный блок может быть включен подобным образом в другие иллюстративные варианты осуществления. Например, сенсорный элемент может использоваться в варианте осуществления фигуры 3 для обеспечения обратной связи для мехатронной управляющей схемы 36 в управляющем мехатронном элементе 34. Например, когда мехатронный элемент 34 является элементом привода, который имеет изменяемое действие привода (например, шаговый двигатель), контактный датчик может обнаруживать, когда был установлен начальный контакт между пластинами генератора, а триггерная управляющая схема 36 прекращать действие привода на текущем шаге.
Существуют различные возможности для признаков или для механизма, с помощью которого может быть достигнуто обнаружение контакта между элементами генератора. В качестве неограничивающего примера сенсорный элемент 72 может просто содержать дополнительную триггерную схему, имеющую связь с выходным напряжением генератора и выполненную с возможностью обнаруживать 'поворотный момент' в выходном напряжении: момент, в который выход генератора прекращает уменьшаться и начинает увеличиваться (указывающий, что был установлен контакт и началась зарядка).
Альтернативно, сенсорный элемент, например, может быть выполнен с возможностью обнаружения изменения импеданса и, в частности, емкости, которая достигает данного порогового уровня. Сенсор может быть акустическим сенсором, выполненным с возможностью обнаружения звукового сигнала, возникающего при физическом контакте между двумя пластинами. Если это уместно, может использоваться параметр двигателя, возбуждающего TENG, в качестве индикатора контакта поверхностей, например, ток двигателя.
В некоторых случаях скорость вращения TENG с вращающимися дисками может быть измерена и использована для определения контакта. Например, скорость вращения, как правило, будет внезапно уменьшаться на некоторую небольшую величину при контакте пластин (предполагая, что движущая сила остается постоянной), поскольку поверхностное сопротивление внезапно увеличивается. Это может быть измерено, например, с использованием акселерометра.
Может быть обнаружен и использован оптический или визуальный сигнал для определения контакта пластин, например, датчик движения или пространственной близости может использоваться для обнаружения относительного расположения пластин. Контакт может определяться с помощью тактильной обратной связи, например, обнаружения вибрации, когда пластины вступают в контакт. Сенсорный элемент 72 в некоторых случаях может содержать датчик смещения по оси или датчик пространственной близости.
Может отслеживаться динамика поверхностей, и могут использоваться различные параметры для определения, началась ли зарядка, например, фрикционный импульс, фрикционный крутящий момент или поверхностные силы (например, высокочувствительные измерения поверхностных силы могут использоваться для определения относительного сближения поверхностей посредством отслеживания сил притяжения и отталкивания).
В случае возбуждения трибоэлектрическим генератором резонансной нагрузки, когда генератор начинает генерировать энергию и соединяется с резонансной нагрузкой, будет изменятся частота нагрузки. Это может использоваться для указания, что началась зарядка.
В некоторых вариантах осуществления может быть желательно, чтобы система содержала дополнительные функциональные возможности для того, чтобы позволить определять уровень трибоэлектризации во время фазы трибоэлектризации, чтобы лучше определять, когда может быть закончен период фазы трибоэлектризации. В конкретных вариантах осуществления фигур 3, 4, 6 и 7 это достигается с помощью только одной схемы 42 триггера Шмитта. Это активирует инициирование бесконтактного режима в ответ на увеличение выходного напряжения генератора 24, 52 от величины ниже до величины выше предварительно определенного верхнего порогового уровня. Альтернативно, может быть обеспечена различающая схема сравнения, выполненная с возможностью определения, что отношение мгновенной выходной мощности или напряжения к начальной выходной мощности или напряжению превысило конкретный верхний порог, чтобы тем самым определить, что имела место достаточная зарядка поверхностей.
Однако в других вариантах осуществления состояние зарядки может быть определено с помощью другого средства, а не триггером Шмитта (или другой схемой сравнения) как в примерах выше.
В качестве неограничивающего примера варианты осуществления могут определять уровень зарядки во время режима зарядки посредством обнаружения или измерения теплоты трения между этими двумя пластинами. Это может быть измерено, например, с использованием простого терморезистора. Альтернативно, может обнаруживаться или измеряться фрикционный крутящий момент (импульс), генерируемый между трибоэлектрически активными поверхностями. Альтернативно, в случае генератора, возбуждающего резонансную нагрузку, когда частота генератора совпадает с частотой резонатора, входящий ток будет падать. Наблюдение, что частота генератора приближается к частоте резонатора, может использоваться для указания, что зарядка завершена.
В этих или любых других вариантах осуществления трибоэлектрическая система может содержать центральный блок контроллера, выполненный с возможностью определения с помощью датчика или другого входного сигнала, когда трибоэлектризация требуется, и когда трибоэлектризация завершается. Эта функция может выполняться, например, компьютерным блоком контроллера, в котором определение моментов и продолжительности фаз контактного и бесконтактного режимов выполняется с использованием программного обеспечения.
Иллюстративные варианты осуществления, описанные выше, обеспечивают систему для регулировки и управления фазами контактного и бесконтактного режимов трибоэлектрического генератора, чтобы минимизировать общее время контакта и, следовательно, контактный износ между пластинами, но при этом удерживая уровень заряда пластин (и, следовательно, уровень выходной мощности/напряжения) от падения ниже некоторого минимального желаемого уровня. В соответствии с этими примерами допускается конкретный диапазон уровней заряда пластин и уровни выходной мощности, при этом выход циклически варьируется между нижним порогом, в момент которого инициируется контакт, и верхним порогом, в момент которого контакт завершается.
В вариантах осуществления контактный и бесконтактный режимы могут быть активированы в ответ на изменения во множестве конкретных параметров пластин, эти параметры прямо или косвенно связаны с состоянием заряда пластин. Например, система может содержать устройство, выполненное с возможностью отслеживания одного или нескольких из: трибоэлектрического напряжения одной или обеих пластин (то есть электрического потенциала пластин), плотности трибоэлектрического поверхностного заряда одной или обеих пластин и электростатически индуцированного тока/зарядов между или на пластинах во время генерации (бесконтактного режима).
В некоторых вариантах осуществления управление моментом и/или продолжительностью контактный и бесконтактной фаз может выполняться в ответ или в зависимости от команд пользовательского ввода. В этом случае контроллер может быть выполнен с возможностью выводить информацию касательно параметров системы, таких как состояние заряда пластин, для использования в ручном управлении моментами и/или продолжительностью различных режимов. Эта выходная информация может передаваться пользователю визуально или акустически, например, через обеспеченный дисплейный блок или через громкоговоритель. Альтернативно она может передаваться тактильно через вибрирующую ручку управления или джойстик, в качестве одного примера. Может быть обеспечено прямое взаимодействие между пользователем и машиной через один или несколько элементов обратной связи от пользователя, таких как, например, интегрированный джойстик, в котором 'актуальная' информация может передаваться пользователю касательно, например, состояние заряда или других параметров генератора, позволяя пользователю непосредственно реагировать с обеспечением входных управляющих команд для управления системой.
В соответствии с одним или несколькими вариантами осуществления система может обеспечивать функциональность полностью 'ручной' трибоэлектризации и генерации: пользователь полностью управляет моментами и/или продолжительностью фаз режима зарядки и отсутствия зарядки, а также мехатронным или иным управлением относительным расстоянием между пластинами с помощью различных пользовательских элементов ввода/вывода. Альтернативно, система может обеспечивать функциональность 'смешанного режима', в котором управление системой частично автоматизировано, а частично (вручную) управляется пользователем. Например, управление моментами и/или продолжительностью фаз контактного и бесконтактного режимов может обеспечиваться вручную, выбираться в ответ на команды пользовательского ввода, в то время как мехатронное или иное управление/привод разделения пластин может быть автоматизирован. Следовательно, контроллер может быть выполнен с возможностью автоматического управления инициированием или переходом в или из режима зарядки или отсутствия зарядки в ответ на некоторые специализированные команды пользовательского ввода. В этом случае пользователь управляет, когда режим изменится, но контроллер автоматически управляет, например, процессом физической реконфигурации пластин.
В других альтернативных вариантах осуществления система может иметь возможность переключения между полностью автоматизированным режимом работы, полностью ручным режимом работы и/или одним или несколькими 'смешанными' режимами работы. Таким образом пользователь может решить оставить систему автоматически регулировать саму себя или может решить переключить систему в режим, позволяющий или требующий пользовательского контроля.
Описанные выше варианты осуществления трибоэлектрических систем преобразования энергии имеют чрезвычайно много применений. В частности, очень ценной является возможность создавать небольшие источники тока для питания небольших компонентов в устройстве, без необходимости обеспечивать специализированный источник питания или линию питания к основному источнику питания устройства. Любое устройство, которое в ходе его нормальной работы генерирует или иным образом имеет доступ к источникам энергии двигателя, может обеспечивать ток или напряжение одному или нескольким компонентам через локально расположенные генераторы TENG.
Изобретение может использоваться во многих генераторах электроэнергии, в особенности тех, которые работают в бесконтактном режиме и теряют заряд, который необходим для получения энергии. Таковыми являются, по сути, генераторы TENG, как известно из приведенных ниже типов.
Первый режим работы является режимом вертикального контакта-разделения, в котором две или более пластин циклически приводятся в контакт или разводятся с помощью прилагаемой силы. Один пример такого устройства был описан в статье "Integrated Multilayered Triboelectric Nanogenerator for Harvesting Biomechanical Energy from Human Motions" of Peng Bai et. al. in ACS Nano 2013 7(4), pp 3713-3719. Здесь устройство содержит многослойную структуру, сформированную на основе зигзагообразной формы. Устройство функционирует на основе поверхностной передачи заряда из-за контактной электризации. Когда к структуре прикладывается давление, зигзагообразная форма сжимается и создает контакт между различными слоями, и контакт прекращается, когда прекращается давление.
Конструкция, которая позволяет получать энергию из движения скольжения, раскрывается в статье "Freestanding Triboelectric-Layer-Based Nanogenerators for Harvesting Energy from a Moving Object of Human Motion in Contact and Non-Contact Modes" in Adv. Mater. 2014, 26, 2818-2824. Свободный подвижный слой скользит между парой статических электродов. Подвижный слой может быть расположен так, чтобы не контактировать со статическими электродами (то есть на небольшом расстоянии над статическими электродами), или он может иметь скользящий контакт.
Третий режим работы является режимом с одним электродом, в котором одна поверхность, например, заземлена, например, поверхность дороги, и нагрузка присоединена между этой первой поверхностью и землей (см., например, Yang, Ya, et al. ʺSingle-electrode-based sliding triboelectric nanogenerator for self-powered displacement vector sensor system.ʺ ACS nano 7.8 (2013): 7342-7351). Вторая поверхность, электрически не связанная с первой, приводится в контакт в первой поверхностью и трибоэлектризует ее. По мере того, как вторая поверхность затем удаляется от первой, избыточный заряд на первой поверхности идет на землю, обеспечивая ток через нагрузку. Следовательно, только один электрод (на одном слое) используется в этом режиме работы для обеспечения выходного тока.
Четвертый режим работы является режимом со свободным трибоэлектрическим слоем, который предназначен для получения энергии от произвольного движущегося объекта, с которым нет никакого электрического соединения. Этот объект может быть проезжающим автомобилем, проезжающим поездом или, например, обувью. (Опять же, см. ʺTriboelectric nanogenerators as new energy technology for self-powered systems and as active mechanical and chemical sensors.ʺ ACS nano 7.11 (2013): 9533-9557).
Есть и другие конструкции трибоэлектрического генератора, такие как конфигурация c двойной дугообразной формой, основанная на контактной электризации. Давление заставляет дуги смыкаться и обеспечивать контакт между слоями дуг, и дуги возвращаются к разомкнутой форме, когда давление прекращается. Также был предложен трибоэлектрический наногенератор, который сформирован как гармонический резонатор для получения энергии от вибраций окружающей среды.
Другие вариации раскрытых вариантов осуществления могут быть придуманы и осуществлены специалистами в области техники при реализации на практике заявленного изобретения после изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и единственное число не исключает множественное. Сам по себе факт, что некоторые средства перечислены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих средств не может быть использована с выгодой. Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничение объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ГЕНЕРАЦИИ ЭНЕРГИИ | 2016 |
|
RU2716857C2 |
| УСТРОЙСТВО ГЕНЕРИРОВАНИЯ ЭНЕРГИИ И СПОСОБ ГЕНЕРИРОВАНИЯ ЭНЕРГИИ | 2016 |
|
RU2689150C1 |
| СИСТЕМА И СПОСОБ ГЕНЕРАЦИИ ЭНЕРГИИ | 2016 |
|
RU2718672C2 |
| СИСТЕМА ГЕНЕРИРОВАНИЯ ИЛИ ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2016 |
|
RU2719361C2 |
| СПОСОБ СЕПАРАЦИИ АЛМАЗОСОДЕРЖАЩИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2353439C2 |
| ДАТЧИК КАЧЕСТВА ВОЛОКОН | 2017 |
|
RU2740258C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ ПОРИСТОСТИ В ДЕТАЛЯХ ИЗ КОМПОЗИЦИОННОГО ПОЛИМЕРА | 2013 |
|
RU2635141C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ЗАРЯДКИ ВЫБРАННОЙ ГРУППЫ ЭЛЕМЕНТОВ БАТАРЕИ | 2004 |
|
RU2506603C2 |
| ГЕНЕРАЦИЯ И РАСПРЕДЕЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 2020 |
|
RU2796080C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ЗАРЯДКИ ВЫБРАННОЙ ГРУППЫ ЭЛЕМЕНТОВ БАТАРЕИ | 2004 |
|
RU2377589C2 |
Изобретение относится к области электротехники, в частности к способу генерации и/или преобразования энергии. Технический результат – повышение выходной мощности. Генератором электрической энергии управляют так, чтобы периодически чередовать контактный режим, во время которого элементы генератора приводятся в контакт для индуцирования состояния зарядки, и бесконтактный режим, во время которого пластины генератора разделяются друг от друга, и генерируется электрическая энергия посредством электростатической индукции. Моментами и продолжительностью контактного и бесконтактного режимов управляют с помощью контроллера или команд пользователя в зависимости от состояния заряда элементов генератора. Таким образом, элементы приводят в контакт только тогда, когда заряд поверхностей падает ниже определенного уровня, и необходима подзарядка. 2 н. и 13 з.п. ф-лы, 7 ил.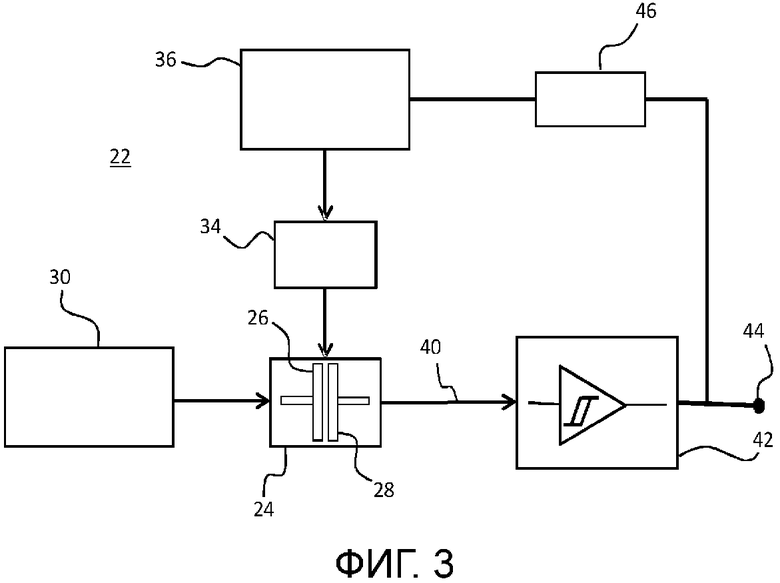
1. Система, содержащая:
генератор (24) электрической энергии для генерации электрической энергии, причем генератор электрической энергии содержит первый элемент (26) и второй элемент (28), выполненные с возможностью иметь состояние зарядки и выполненные с возможностью быть подвижными относительно друг друга для генерации электрической энергии, когда эти элементы имеют состояние зарядки, причем первый элемент (26) и второй элемент (28) дополнительно выполнены с возможностью приведения в контакт и выведения из контакта друг с другом;
приводной механизм для приведения в контакт и выведения из контакта первого элемента (26) и второго элемента (28),
при этом система выполнена с возможностью работы в:
- режиме зарядки, в котором первый элемент и второй элемент находятся в контакте для изменения состояния зарядки, и
- режиме генерации энергии, в котором первый элемент и второй элемент не имеют контакта;
отличающаяся тем, что упомянутая система дополнительно содержит:
устройство для определения состояния зарядки; и
контроллер для:
- управления моментом и/или продолжительностью режима зарядки в зависимости от состояния зарядки; или
- вывода информации для использования в управлении моментом и/или продолжительностью режима зарядки в зависимости от состояния зарядки.
2. Система по п. 1, в которой устройство для определения состояния зарядки содержит схему (42) сравнения для приема выходного сигнала генератора электрической энергии.
3. Система по п. 2, в которой схема (42) сравнения содержит схему триггера Шмитта.
4. Система по любому из предыдущих пунктов, в которой первый элемент (26) и второй элемент (28) содержат первый дисковый элемент и второй дисковый элемент, имеющие возможность вращения относительно друг друга.
5. Система по любому из предыдущих пунктов, в которой первый элемент и второй элемент имеют возможность перемещения относительно друг друга на расстоянии перемещения, которое зафиксировано равным конкретной величине в режиме генерации энергии.
6. Система по п. 4, в которой приводной механизм содержит одну или более топографических особенностей со спиральным рельефом, сформированных на поверхности(ях) первого дискового элемента (26) и/или второго дискового элемента (28), причем топографические особенности со спиральным рельефом предназначены для создания расстояния между первыми и вторыми элементами в ответ на вращение.
7. Система по любому из предыдущих пунктов, дополнительно содержащая блок (66) двигателя для генерации относительного движения между первым элементом (26) и вторым элементом (28).
8. Система по п. 7, в которой контроллер содержит схему (68) контроллера двигателя, соединенную с блоком (66) двигателя, для управления возбуждающим входным напряжением для блока двигателя.
9. Система по любому из предыдущих пунктов, в которой приводной механизм содержит мехатронный приводной элемент (34).
10. Система по п. 9, в которой контроллер содержит схему (36) управления мехатронным приводом.
11. Система по любому из предыдущих пунктов, в которой контроллер содержит модуль пользовательского ввода для приема команд от пользователя.
12. Система по п. 11, в которой контроллер содержит модуль пользовательского вывода для вывода пользователю информации для использования в ручном управлении моментом и/или продолжительностью режима зарядки.
13. Способ работы генератора (24, 52) электрической энергии для генерации электрической энергии, причем генератор электрической энергии содержит первый элемент (26) и второй элемент (28), выполненные с возможностью иметь состояние зарядки и выполненные с возможностью быть подвижными относительно друг друга для генерации электрической энергии, причем первый элемент (26) и второй элемент (28) дополнительно выполнены с возможностью приведения в контакт и выведения из контакта друг с другом, причем упомянутый способ содержит этапы, на которых:
приводят в контакт или выводят из контакта первый элемент (26) и второй элемент (28) для реализации режима зарядки, в котором элементы находятся в контакте для изменения состояния зарядки, и режима отсутствия зарядки, в котором элементы находятся не в контакте,
отличающийся тем, что упомянутый способ дополнительно содержит этапы, на которых:
определяют состояние зарядки, и альтернативно
управляют моментом и/или продолжительностью зарядки в зависимости от состояния зарядки,
или
выводят информацию для использования в управлении моментом и/или продолжительностью режима зарядки в зависимости от состояния зарядки.
14. Способ по п. 12, в котором первый элемент (26) и второй элемент (28) приводят в контакт в ответ на падение выходного напряжения (40) генератора электрической энергии (24) от уровня выше нижнего порога до уровня ниже упомянутого нижнего порога, и в котором первый и второй элементы выводятся из контакта в ответ на повышение выходного напряжения упомянутого генератора от уровня ниже верхнего порога до уровня выше упомянутого верхнего порога.
15. Способ по п. 12 или 13, в котором первый элемент (26) и второй элемент (28) приводят в контакт и/или выводят из контакта посредством мехатронного управляющего элемента (34).
| US 20130088117 A1, 11.04.2013 | |||
| US 20140028151 A1, 30.01.2014 | |||
| СПОСОБ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ВЫСОКОГО НАПРЯЖЕНИЯ | 2002 |
|
RU2216095C1 |
| САМОВОЗБУЖДАЮЩИЙСЯ ЭЛЕКТРОСТАТИЧЕСКИЙГЕНЕРАТОР | 0 |
|
SU352357A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ДВИГАТЕЛЬ | 1986 |
|
SU1452427A1 |
| ЭЛЕКТРОСТАТИЧЕСКАЯ ЕМКОСТНАЯ МАШИНА ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВЕТРОВОГО ПОТОКА | 2003 |
|
RU2241300C2 |

