ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способам и устройствам для определения того, для каких перемещений человека или объекта должны быть сгенерированы количественные показатели.
УРОВЕНЬ ТЕХНИКИ
Классифицирующие системы принимают данные, анализируют эти данные, а затем ставят указанные данные в соответствие с известной совокупностью с использованием классификатора, причем один или более элементов из этих данных соответствуют одному или более элементов из известной совокупности. Например, в классифицирующей системе для определения движений человека, датчики могут измерять действия человека. Эти датчики могут вводить свои данные в классифицирующую систему, которая затем анализирует эти данные для определения того, на какие действия эти данные наиболее похожи. Примеры такой классификации могут быть предназначены для классифицирования того, сидит ли человек, стоит, идет пешком, держит телефон, наклонился или выполнил некоторое другое действие. В другом примере классифицирующая система может анализировать входные данные от датчиков, расположенных на воздушном летательном аппарате, а затем может классифицировать некоторый аспект работы воздушного летательного аппарата, такой как выполняет ли воздушный летательный аппарат поворот или были ли развернуты закрылки.
Однако, в некоторых случаях может отсутствовать необходимость в измерении дополнительных количественных показателей, касающихся человека. Например, может отсутствовать необходимость в отслеживании количественных показателей о перемещениях человека вследствие наличия сгенерированных необязательных данных. Таким образом, необходимы способы и устройства, которые выполнены с возможностью определения того, для каких движений человека или объекта должны быть получены количественные показатели.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Иллюстративные варианты реализации обеспечивают способ идентификации интересуемого движения отдельного человека. Способ включает сбор, в компьютере, входных данных датчика движения о движениях отдельного лица от датчика движения в течение определенного интервала времени. Способ дополнительно включает анализ, с использованием компьютера, входных данных датчика движения с использованием приложения для анализа, имеющего совокупность классифицированных предварительно определенных интересуемых движений. Приложение для анализа классифицирует перемещение, захваченное во время этого интервала времени в качестве движения, соответствующего одному из множества предварительно определенных интересуемых движений, на основании общих относительных атрибутов. Способ дополнительно включает генерирование выходных данных с обеспечением выдачи уведомления об идентифицированном предварительно определенном интересуемом движении на контролирующую систему.
Иллюстративные варианты реализации также обеспечивает устройство для идентификации интересуемого движения отдельного человека. Устройство содержит датчик движения и компьютер, имеющий связь с этим датчиком движения. Компьютер выполнен с возможностью сбора данных датчика движения о движениях отдельного лица от датчика движения в течение определенного интервала времени. Устройство дополнительно содержит считываемый компьютером носитель данных для длительного хранения данных, хранящий приложение для анализа, имеющее совокупность классифицированных предварительно определенных интересуемых движений. Приложение для анализа дополнительно выполнено таким образом, что после его исполнения компьютером, это приложение для анализа классифицирует перемещение отдельного лица, захваченное во время этого интервала времени, в качестве движения, соответствующего одному из множества предварительно определенных интересуемых движений, на основании общих относительных атрибутов. Приложение для анализа дополнительно выполнено с возможностью, после его исполнения, генерировать выходные данные с обеспечением выдачи уведомления об идентифицированном предварительно определенном интересуемом движении на контролирующую систему.
Иллюстративные варианты реализации также обеспечивают систему. Система содержит измерительное устройство для измерения кинематики, содержащее один или более датчиков, выполненных с возможностью определения множества физических положений части объекта. Система дополнительно содержит ассоциативную память, имеющую связь с измерительным устройством для измерения кинематики и содержащую множество данных и множество ассоциаций среди указанного множества данных, причем указанное множество данных собрано в ассоциированные группы, ассоциативная память выполнена с возможностью выдачи на нее запроса на основании по меньшей мере непрямых связей среди указанного множества данных. Система дополнительно содержит процессор, имеющий связь с ассоциативной памятью и измерительным устройством для измерения кинематики и выполненный с возможностью приема входных данных о движении объекта от измерительного устройства для измерения кинематики, возможностью сравнения, совместно с ассоциативной памятью, входных данных о движении со множеством предварительно определенных движений, сохраненных в ассоциативной памяти, возможностью классификации входных данных о движении как конкретного движения, выбранного из множества предварительно определенных движений, и с возможностью уведомления контролирующей системы о том, когда указанное конкретное движение совпадает с одним из субсовокупности из указанного множества предварительно определенных движений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Новые признаки, считаемые характеристикой иллюстративных вариантов реализации, определены в приложенной формуле изобретения. Однако, иллюстративные варианты реализации, а также предпочтительный режим использования, их дополнительные задачи и признаки, будут наилучшим образом понятны по ссылке на приведенное далее подробное описание иллюстративного варианта реализации настоящего изобретения при прочтении в сочетании с прилагаемыми чертежами.
На фиг. 1 показано одно из применений системы определения кинематики в соответствии с иллюстративным вариантом реализации.
На фиг. 2 показан пример классифицирующей системы в соответствии с иллюстративным вариантом реализации.
На фиг. 3 показан пример системы определения кинематики при ее использовании в соответствии с иллюстративным вариантом реализации.
На фиг. 4 показан пример предварительно записанного действия, классифицированного как вытягивание рук, в соответствии с иллюстративным вариантом реализации.
На фиг. 5 показан пример предварительно записанного действия, классифицированного как нахождение в положении стоя, в соответствии с иллюстративным вариантом реализации.
На фиг. 6 показан пример предварительно записанного действия, классифицированного как стояние на коленях, в соответствии с иллюстративным вариантом реализации.
На фиг. 7 показан пример ввода активностей в классифицирующую систему в соответствии с иллюстративным вариантом реализации.
На фиг. 8 показан пример контроля активностей в соответствии с иллюстративным вариантом реализации.
На фиг. 9 показан пример системы для сбора количественных показателей с использованием ассоциативной памяти в соответствии с иллюстративным вариантом реализации.
На фиг. 10 показан пример сравнения субъекта с выходными данными как результирующей категории в соответствии с иллюстративным вариантом реализации.
На фиг. 11 показана блок-схема способа идентификации интересуемого движения отдельного человека в соответствии с иллюстративным вариантом реализации.
На фиг. 12 показана еще одна блок-схема способа идентификации интересуемого движения отдельного человека в соответствии с иллюстративным вариантом реализации.
На фиг. 13 показано устройство для идентификации интересуемого движения отдельного человека в соответствии с иллюстративным вариантом реализации.
На фиг. 14 показана система для уведомления контролирующей системы о том, когда конкретное движение совпадает с одним из субсовокупности из множества предварительно определенных движений в соответствии с иллюстративным вариантом реализации.
На фиг. 15 показана система обработки данных в соответствии с иллюстративным вариантом реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Иллюстративные варианты реализации показывают и учитывают, что полученные точные результаты измерений или точные количественные показатели, касающиеся конкретного положения человека, часто сложно собрать без наличия кого-то, представленного в физическом смысле, для обеспечения наблюдения. Например, может быть необходимо идентифицировать то, насколько долго отдельное лицо сохраняет неудобное положение для обучения этого отдельного лица минимизации потенциального вреда, который может быть нанесен во время нахождения человека в этом положении. Кроме того, многие положения могут наносить вред при их повторном или неправильном выполнении. Риск получения травмы по причине плохой осанки может увеличиваться на производственных предприятиях, где сотрудников просят сгибаться, вытягивать руки и тянуться при установке оборудования и его частей. Одна из задач иллюстративных вариантов реализации состоит в оказании помощи в понимании того, как долго сотрудники находятся в этих видах положений в надежде на обучение этих сотрудников в части связанных с риском физических поведенческих действий, о которых они могут и не знать.
Иллюстративные варианты реализации также показывают, что конкретные положения тела могут оказаться сложными для идентификации вследствие их сущности. Такие положения тела могут оказаться сложными для измерения. Иллюстративные варианты реализации могут выделить сложные для измерения положения для их контроля. Иллюстративные варианты реализации могут решать эту задачу путем захвата сложных в описании характеристик путем обеспечения наличия человека, который демонстрирует такие поведенческие действия и их захваченные положения. Продемонстрированные поведенческие действия используют для обучения классифицирующей системы. Таким образом, можно избежать подробного математического описания положения. Данная функция дополнительно описана далее.
В уровне техники контроль положения тела человека в производственной окружающей обстановке включает наличие кого-то, кто наблюдает за другим человеком по мере того, как они занимаются конкретной активностью. Обычно, роль наблюдателя состоит в сборе количественных показателей, касающихся конкретного положения, по мере выполнения активности. Пример этих количественных показателей состоит в том, как долго человек имеет заданный тип положения тела.
Данное решение оказывается не очень эффективным. Прежде всего для обеспечения наблюдения необходим дополнительный личный персонал, а возможно и нежелательное количество дополнительного личного персонала. Затем, поскольку наблюдаемый человек часто знает, что они находятся под наблюдением, то этот человек не имеет склонности к выполнению активности тем же самым образом, когда они были одни. Кроме того, наблюдатель-человек предрасположен к ошибке, когда он осуществляет наблюдение в течение длительных периодов времени. Кроме того, наблюдатель-человек может иметь когнетивное отклонение, которое искажает собранные количественные показатели.
Другая технология контроля из уровня техники была предназначена для контроля активностей путем использования видеокамер. Однако, данное решение все еще требовало контроля со стороны человека и стремилось быть менее личным, чем наличие кого-то, представленного в физическом смысле. Несмотря на то, что камеры могут захватывать много информации о конкретных положениях, все еще есть потребность в ком-то на другом конце камеры для интерпретации результатов. Кроме того, во множестве ситуаций использование видеокамер сталкивается с препятствиями или запрещено. Кроме того, людям не нравится, когда видеокамеры наблюдают за ними, когда они эти люди находятся на рабочем месте.
Иллюстративные варианты реализации определяют эти недостатки уровня техники и обеспечивают способы и устройства для преодоления этих недостатков. В частности, иллюстративные варианты реализации контролируют активности с использованием устройства ввода для регистрации движений в противоположность камере несмотря на то, что эти иллюстративные варианты реализации могут быть реализованы, при необходимости, с использованием камеры. Как использовано в настоящей заявке, устройство ввода для регистрации движений представляет собой устройство, используемое для определения изменения в положении объекта относительно окружающей его среды или изменения окружающей среды по отношению к объекту.
В необходимые интервалы времени устройство ввода для регистрации движений может записывать кадр или кадры отдельного лица в конкретном положении, а затем может загружать эту информацию в ассоциативную память для классификации положения по отношению к ранее записанным активностям. Несмотря на то, что термин «ассоциативная память» определен далее более формальным образом в контексте системы 1500 обработки данных по фиг. 15, в целом ассоциативная память представляет собой устройство, в котором информация собрана в ассоциированные группы в интересах получения нового понимания на основании связей, а не прямого сопоставления. «Классификация» представляет собой задачу по идентификации того, к какой совокупности категорий принадлежат новые результаты наблюдений, на основании обучающего набора данных, содержащих результаты наблюдений (или варианты), категория которых является уже известной. Иллюстративные варианты реализации используют эту информацию для обеспечения количественных показателей, касающихся контролируемой физической активности пользователей-добровольцев.
Один новый аспект иллюстративных вариантов реализации состоит в возможности использования кадров, собранных из устройства ввода для регистрации движений, для определения того, в каком положении находится человек, и для определения того, должны ли быть собраны количественные показатели для этого положения. После захвата кадров, иллюстративные варианты реализации используют классификацию ассоциативной памяти для приведения кадров в соответствие с предварительно записанным действием. Если классификация совпадает с одной из конкретной совокупности положений, то могут быть сгенерированы количественные показатели, относящиеся к этому положению. В другом случае контроль может продолжаться без генерирования количественных показателей, что сохраняет временные ресурсы и информационные ресурсы.
Таким образом, иллюстративные варианты реализации используют кадры, соединенные с ассоциативной памятью, для идентификации конкретного положения и для его точного измерения путем его классифицирования с использованием предварительно записанных активностей. Иллюстративные варианты реализации не осуществляют прямое сопоставление математически описанного положения, однако вместо этого пытаются сопоставить атрибуты положения.
Другими словами, новый аспект иллюстративных вариантов реализации состоит в возможности интерпретировать положение человека и определять, представляет ли это положение собой положение, которое должно быть измерено на основании активностей, ранее идентифицированных пользователем. Данная возможность обеспечивает количественный анализ активностей, которые в других случаях может быть сложно измерить или захватить.
Иллюстративные варианты реализации имеют другие преимущества. Например, иллюстративные варианты реализации могут функционировать ненавязчивым образом, то есть могут быть малозаметны для наблюдаемого участника. Несмотря на то, что пользователь должен быть проинформирован о новом результате наблюдения заблаговременно, работа иллюстративных вариантов реализации может казаться менее принудительной. В другом примере иллюстративные варианты реализации могут использовать недорогие аппаратные средства и централизованное программное обеспечение. В другом примере иллюстративные варианты реализации являются гибкими, поскольку эти иллюстративные варианты реализации могут функционировать во многих ситуациях без их программирования. В другом примере различия, которые иллюстративные варианты реализации используют для измерения различных активностей, могут быть обновлены, изменены или улучшены так, как это необходимо, возможно в реальном времени. В другом примере после настройки нет необходимости во вмешательстве человека. Иллюстративные варианты реализации могут быть полностью автоматизированы.
В другом примере иллюстративные варианты реализации не ограничены только контролем перемещения человека, однако могут быть также применены и к другим не принадлежащим человеку перемещениям. Например, иллюстративные варианты реализации могут быть использованы для отслеживания перемещения животных или перемещения роботов, полагая, что эти перемещения могут быть определены посредством устройства ввода.
Иллюстративные варианты реализации могут выполнены с возможностью обучения путем улучшения их классификаций. Иллюстративные варианты реализации могут заменять устаревшие и более трудоемкие технологии контроля активностей. Иллюстративные варианты реализации представляют собой независимый и универсальным образом развертываемый объект.
Иллюстративные варианты реализации описывают новое применение устройства ввода для регистрации движений с использованием классификации ассоциативной памяти, а не базовых лицензированных основополагающих технологий, каждая из которых используется для выполнения этих процессов. Иллюстративные варианты реализации выполнены с возможностью классифицирования результата наблюдения с использованием примера классификации ассоциативной памяти. Однако, иллюстративные варианты реализации могут быть выполнены с использованием любого типа классифицирующего механизма и не ограничены только использованием ассоциативной памяти.
Иллюстративные варианты реализации выполнены с возможностью определения перемещений путем использования интерфейса устройства ввода для регистрации движений. Данный интерфейс может изменяться по объему и функциональности, однако сохраняет действие по определению координат перемещения в зависимости от того, в каком качестве может работать устройство ввода для регистрации движений.
Иллюстративные варианты реализации не ограничены этим типом активности или положением, которое настоящее изобретение может контролировать. Иллюстративные варианты реализации не ограничены этим типом количественных показателей, которые настоящее изобретение может собирать в зависимости от активности или положения. Иллюстративные варианты реализации не ограничены определенным количеством людей, которых настоящее изобретение может контролировать в зависимости от активности или положения. Иллюстративные варианты реализации не определяют временные рамки на основе длительности интервала во время этапа контроля.
На фиг. 1 показана одно использование системы определения кинематики в соответствии с иллюстративным вариантом реализации. Использование системы 102 определения кинематики 102, показанной на фиг. 1, не обязательно ограничивает заявленные изобретения, а только показывает одно возможное использование иллюстративных вариантов реализации. Дополнительные использования иллюстративных вариантов реализации описаны далее.
Вкратце, иллюстративные варианты реализации контролируют активности одного или более отдельных лиц 100 с использованием системы 102 определения кинематики (которая может также быть охарактеризована в качестве устройства ввода для регистрации движений). В совокупности интервалов система 102 определения кинематики записывает кадр или кадры одного или более отдельных лиц 100 в конкретных положениях, а затем подает эту информацию в ассоциативную память 104 для классифицирования этой информации по отношению к ранее записанным активностям 106. Иллюстративные варианты реализации используют эту информацию для обеспечения количественных показателей, касающихся конкретных активностей, которые необходимо контролировать. В иллюстративном варианте реализации количественные показатели 108 будут получены только для конкретных активностей, которые желательно контролировать.
Более подробно, иллюстративное использование, показанное на фиг. 1, включает использование данных, собранных из системы 102 определения кинематики, для отслеживания перемещений или измеренных положений одного или более отдельных лиц 100. Одно или более отдельных лиц 100 может представлять собой одно отдельное лицо, демонстрирующее множество положений в течение времени или может представлять собой множество людей во множестве различных положений (каждое из которых отслеживается).
Измеренные положения подают в ассоциативную память 104 с использованием симантики, которую лучше всего понимает ассоциативная память 104. Таким образом, например, система 102 определения кинематики может и не отправлять математические данные о положении в ассоциативную память 104, однако вместо этого отправляют качественные характеристики относительных положений в ассоциативную память 104. В более конкретном примере система 102 определения кинематики может отправлять входные данные, которые описывают положение правого колена человека как «несколько ниже бедра». Ассоциативная память 104 может затем извлечь это и другие количественные дескрипторы, а также может сравнить их с данными для обучения, как дополнительно описано далее, для классификации человека как стоящего на коленях. Пример стояния на коленях продемонстрирован человеком 110 на фиг. 1. В свою очередь человек 112 демонстрирует нахождение в положении стоя, а человек 114 демонстрирует вытягивание рук. В альтернативных иллюстративных вариантах реализации некоторые другие промежуточные аппаратные средства или программное обеспечение, или сама ассоциативная память могут получать математическое положение или данные о координатах из системы 102 определения кинематики и преобразовывать такие данные в качественные дескрипторы, как описано выше.
Для снижения требований к обработке и хранению данных или просто для уменьшения количества созданных отчетов, может быть необходимо контролировать только конкретные положения или перемещения. Таким образом, иллюстративные варианты реализации могут быть приведены в действие с тем, чтобы захватить количественные показатели 108 о конкретной совокупности положений или перемещений, для которых могут быть необходимы количественные показатели. Количественные показатели 108 могут представлять собой, например, количество времени, которое человек проводит в конкретном положении, общее количество времени за весь рабочий день, которое человек проводит в конкретном положении, наибольшее время, проведенное в конкретном положении, среднее время, проведенное в конкретном положении, или любые другие необходимые количественные показатели.
Например, без обязательного ограничения заявленных изобретений, иллюстративные варианты реализации могут быть использованы для определения того, относится ли определенное перемещение к набору текста, разговору по телефону, перемещению пешком, наклонению вперед, потягиванию, использованию поручней или любой другой конкретной физической активности. Совокупность выходных данных может представлять собой «набор текста, разговор по телефону, перемещение пешком или использование поручней». Определяют то, относится ли определенное перемещение к одному элементу из этой совокупности. Данное определение может быть осуществлено с использованием ассоциативной памяти на основании обучающей совокупности данных, содержащих результаты наблюдения или примеры, для которых принадлежность к категории является известной. Другими словами, ассоциативная память была обучена распознавать конкретную совокупность входных данных, ассоциированных с «набором текста» или некоторым другим положением, движением или активностью.
В иллюстративном варианте реализации количественные показатели 108 необходимы только для такой активности как «стояние на коленях». Поскольку классифицированное положение представляет собой «стояние на коленях», то затем могут быть использованы количественные показатели 108, касающиеся движений человека в динамике по времени. В другом случае количественные показатели 108 не оказываются использованными. В альтернативном варианте может быть необходимо взять количественные показатели 108 для трех активностей: нахождение в положении стоя, стояние на коленях и вытягивание рук, а не для других активностей. Затем количественные показатели 108 могут представлять собой, например, количество времени, которое человек проводит в конкретном положении, общее количество времени за весь рабочий день, которое человек проводит в конкретном положении, наибольшее время, проведенное в конкретном положении, среднее значение времени, проведенного в конкретном положении или любые другие необходимые количественные показатели.
Что касается устройств, использованных в иллюстративных вариантах реализации, то система 102 определения кинематики может представлять собой любое устройство, использованное для определения изменений в положении объекта по отношению к окружающей его среде или изменения в окружающей среде по отношению к объекту. В конкретном примере, который не обязательно ограничивает пункты формулы изобретения, система 102 определения кинематики может представлять собой продукт, который доступен на рынке в готовим виде. Система 102 определения кинематики может быть нормально использована для игры в компьютерные игры, такие как, например, на фиг. 3. Однако, система 102 определения кинематики может представлять собой акселерометр, систему камер или любую другую подходящую технологию для определения перемещения одного или более человек или объектов в области. Таким образом, например, система 102 определения кинематики может быть использована для отслеживания положений робота. В данном случае иллюстративные варианты реализации могут определять, находятся ли перемещения робота в рамках конструктивных параметров.
На фиг. 2 показан пример классифицирующей системы в соответствии с иллюстративным вариантом реализации. Классификация 200 по фиг. 2 показывает принципы классификации, как использовано в настоящей заявке, но не обязательно иллюстративные варианты реализации. Другими словами, классификация 200 показывает принципы классификации, которые могут быть использованы для реализации иллюстративных вариантов реализации в отношении определения того, когда захватить количественные показатели для конкретных движений, положений или активности пользователей или устройств, как описано согласно фиг. 1.
Прежде всего следует обратить внимание на то, что значит термин «классификация». «Классификация», как использовано в настоящей заявке, определена как возможность идентифицировать или как действие по идентификации того, к какой группе объектов принадлежат новые результаты измерений путем сравнения характеристик этих новых результатов наблюдения с известной совокупностью характеристик. Как использовано в иллюстративных вариантах реализации, известные характеристики заданы путем обучения системы. «Обучение системы», как использовано в настоящей заявке, определено как предоставление системе характеристик известных элементов из совокупности. Другими словами, обучение системы обеспечивает инструкции для этой системы, касающиеся того, какое конкретное положение «напоминает» или скорее того, что представляют собой характеристики конкретного положения. После обучения системы, эта система может быстро сравнить характеристики нового результата наблюдения с совокупностью известных характеристик известных элементов, а затем приравнять этот результат наблюдения к одному из известных элементов из совокупности, который наиболее близко совпадает с характеристиками нового результата наблюдения. Как использовано в настоящей заявке, «система» или «иллюстративные варианты реализации» относятся к процессору, специализированной интегральной микросхеме (ASIC) и/или другому физическому оборудованию, используемому или выполненному с возможностью использования для реализации иллюстративных вариантов реализации, включая, по возможности, считываемый компьютером носитель данных для длительного хранения данных, хранящий программный код для реализации захвата движения или описанную в настоящей заявке классифицирующую систему.
На фиг. 2 показан пример классифицирования по отношению к системе электронной почты. В данном случае система классифицирует входящую электронную почту как сохраненное электронное сообщение или как нежелательное электронное сообщение на основании конкретных характеристик. Таким образом, классификация 200 имеет два известных элемента в совокупности известных элементов. Эти известные элементы представляют собой сохраненное электронное сообщение 202 и нежелательное электронное сообщение 204. Система была обучена путем установления первых характеристик сохраненного электронного сообщения 202 и вторых характеристик нежелательной электронного сообщения 204. Система затем была запрограммирована сравнивать третьи характеристики нового результата наблюдения, который представляет собой входную электронную почту, с первыми характеристиками сохраненного электронного сообщения 202 и вторыми характеристиками нежелательного электронного сообщения 204. Новый результат наблюдения затем был классифицирован как относящийся к сохраненному электронному сообщению 202 или нежелательному электронному сообщению 204.
Кроме того, характеристики, которые составляют каждую категорию, а именно сохраненное электронное сообщение 202 или нежелательное электронное сообщение 204, являются уже известными. Например, сохраненное электронное сообщение 202 обычно исходит от выявленного отправителя. Таким образом, сохраненное электронное сообщение 202 имеет, в качестве одной характеристики, выявленного отправителя. Также возможны и другие характеристики. И наоборот, нежелательное электронное сообщение 204 обычно имеет характеристику, которая не исходит от выявленного отправителя. Нежелательное электронное сообщение 204 часто также имеет другие характеристики, такие как наличие слов, используемых в объявлении по продаже продукта или услуги. В зависимости от количества общих совпадений между характеристиками нового результата наблюдения и характеристиками известной совокупности элементов, система будет задавать надлежащую категорию для размещения входящего электронного сообщения.
В терминологии компьютерного обучения классифицирующая система рассматривается в качестве примера управляемого обучения, то есть обучения, в котором доступна обучающая совокупность правильно идентифицированных результатов наблюдения. Соответствующая неконтролируемая процедура известна как кластеризация или кластерный анализ. Кластерный анализ может включать группирование данных по категориям на основании некоторого результата измерения характерного сходства. Пример результатов измерений содержит расстояние между вариантами, рассматриваемое в виде векторов в многомерном векторном пространстве.
На фиг. 3 показан пример системы определения кинематики при использовании в соответствии с иллюстративным вариантом реализации. Система 300 определения кинематики может представлять собой систему 102 определения кинематики по фиг. 1. Перемещения пользователя 302 могут быть классифицированы системой с использованием классифицирующей системы способом, аналогичным способу, который показан посредством классификации 200 по фиг. 2.
Как описано выше, иллюстративные варианты реализации могут использовать систему 300 определения кинематики по отношению к перемещениям пользователя 302. Устройства ввода для регистрации движений, такие как система 102 определения кинематики по фиг. 1, может быть использовано как часть системы 300 определения кинематики для определения изменения в положении пользователя 302 относительно своей окружающей среды 304.
Обычно устройства ввода для регистрации движений, такие как система 300 определения кинематики, содержат программное обеспечение, которое отображает декартовы координаты места, в котором было осуществлено определенное перемещение. Этот дисплей может принимать форму высокого человека, такого как высокий человек 306, или может и не быть вообще визуально представлен. В каждом случае иллюстративные варианты реализации могут использовать измеренные координаты для расчета перемещений пользователя 302.
Для измерения перемещений объекта иллюстративные варианты реализации могут соотносить координаты положения, общего для всех сторон, другими словами иллюстративные варианты реализации могут сравнивать одни перемещения рук с другими перемещениями рук. Эти результаты измерения могут быть, при необходимости, дополнительно нормализованы. Например, иллюстративные варианты реализации могут также использовать расстояние между частями тела, которые являются относительно статичными, такие как от центра бедра до позвоночника, при нормализации этих результатов измерений.
На всех из фиг. 4, фиг. 5 и фиг. 6 показаны примеры предварительно записанных действий. Предварительно записанные действия используют для обучения ассоциативной памяти, такой как ассоциативная память 104 по фиг. 1, или процессор может сравнивать неизвестные входные данные с известными предварительно записанными действиями для классифицирования неизвестных входных данных в качество одного из предварительно записанных действий. Пример классифицирования показан на фиг. 2. Входные данные могут быть получены от устройства ввода данных о движении, такого как система 300 определения кинематики по фиг. 3.
Кроме того, на фиг. 4 показан пример предварительно записанного действия, классифицированного как вытягивание рук, в соответствии с иллюстративным вариантом реализации. На фиг. 5 показан пример предварительно записанного действия, классифицированного как нахождение в положении стоя, в соответствии с иллюстративным вариантом реализации. На фиг. 6 показан пример предварительно записанного действия, классифицированного как стояние на коленях, в соответствии с иллюстративным вариантом реализации.
Для улучшения качества соотнесения неизвестных входных данных с предварительно записанным действием, ассоциативная память может быть обучена с использованием множества примеров того, что составляет конкретное интересуемое действие. Таким образом, например, все из положения 400, положения 402, положения 404 и положения 406 представляю собой примеры вытягивания рук, хотя, как показано на фиг. 4, все четыре положения немного отличаются друг от друга. Аналогичным образом, все из положения 500, положения 502, положения 504 и положения 506 представляют собой примеры нахождения в положении стоя, хотя, как показано на фиг. 5, все четыре положения несколько отличаются друг от друга. Аналогичным образом, все из положения 600, положения 602, положения 604 и положения 606 представляют собой стояние на коленях, хотя, как показано на фиг. 6, все четыре положения немного отличаются друг от друга. Следует отметить, что в случае по фиг. 6, примеры нахождения в положении на коленях взяты при различных углах относительно системы определения кинематики таким образом, что ассоциативная память может распознать то же самое положение из различных углов.
Следует обратить внимание на то, что происходит после того, как ассоциативная память успешно классифицировала неизвестные входные данные как одно из интересуемых положений, таких как положения, показанные на фиг. 4-6. Задача иллюстративных вариантов реализации состоит в определении того, находится ли отдельный человек в конкретном положении, с использованием системы определения кинематики или другого устройства ввода для регистрации движений и для сбора количественных показателей, касающихся этого положения. Для решения этой конкретной задачи, иллюстративные варианты реализации могут использовать ассоциативную память для хранения предварительно записанного перечня действий. Каждое действие содержит положение или положения, для которых пользователь хочет собрать количественные показатели.
Затем, во время этапа контроля, перемещения отдельного человека могут быть периодически испытаны посредством классификации ассоциативной памяти с тем, чтобы увидеть, совпадают ли они с какими-либо из положений в предварительно записанных действиях. Если имеет место совпадение, то иллюстративные варианты реализации собирают количественные показатели, касающиеся этого положения за период времени, в течение которого отдельный контролируемый человек сохраняет это конкретное положение.
Весь процесс включает несколько логических этапов. Для целей ясности следующий пример будет описывать каждый этап с использованием примера контроля отдельного человека, устанавливающего некоторое оборудование, что включает стояние на коленях, нахождения в положении стоя и вытягивание рук. Иллюстративные варианты реализации будет собирать количественные показатели по отношению к этим положениям. Для данного примера, собранные количественные показатели будут характеризовать период времени, в течение которого отдельный человек сохранял каждое положение. Следует отметить, однако, что данный конкретный пример не обязательно ограничивает заявленные изобретения или другие иллюстративные варианты реализации, описанные в настоящей заявке; возможны и многие другие примеры, как пояснено в других разделах настоящей заявки.
В данном конкретном иллюстративном варианте реализации первый этап состоит в идентификации положений, для которых пользователь хочет собрать количественные показатели. Эти положения могут представлять собой часть от всего перемещения или действия, такого как «шнурование ботинка», или они могут быть настолько простыми, как стационарное положение, такое как «нахождение на коленях».
В каждом случае на следующем втором этапе пользователь будет соответственно демонстрировать каждое перемещение перед датчиком движения и записывать их. Эти записи станут основной для классификации ассоциативной памяти. Для данного примера установки, положения, для которых количественные показатели должны быть идентифицированы, могли бы представлять собой стояние на коленях, нахождение в положении стоя и вытягивание рук. Количественные показатели для этих положений могли бы представлять собой их продолжительности.
Задача записи активностей, описанных в данном втором этапе, состоит в том, чтобы сообщить классифицирующей системе о том, для какого положения или каких положений необходимы собранные количественные показатели. В течение этого второго этапа, пользователю необходимо только продемонстрировать каждую активность в случае, если захвачено конкретное положение.
Например, если кто-то захотел собрать количественные показатели, относящиеся к кому-то, кто находится в положении вытягивания рук, то он мог бы продемонстрировать нахождение в положении стоя путем путем распрямления своего тела несколько раз при движении типа вытягивание рук, как объяснено на фиг. 4. Например, пользователь может моделировать установку багажника в кабину самолета. Пользователь мог бы повторять этот процесс для других положений, а именно для нахождения в положении стоя и стояние на коленях, как пояснено соответственно на фиг. 5-6.
Каждая активность может быть продемонстрирована несколько раз с использованием различных людей и может быть записана с различных ракурсов. Множество демонстраций каждым из множества различных людей будут обеспечивать ассоциативную память полным описанием для каждых необходимых выходных данных.
На фиг. 7 показан пример ввода активностей в классифицирующую систему в соответствии с иллюстративным вариантом реализации. На фиг. 7 показан третий этап в вышеописанном процессе, который состоит в обучении ассоциативной памяти. Первый этап (идентификация интересуемых положений) и второй этап (показывает примеры положений для обучения ассоциативной памяти) описаны выше согласно фиг. 4-6. Ассоциативная память 700 может представлять собой, например, ассоциативную память 104 по фиг. 1. Классифицирующая система 702 может быть использована, например, для осуществления классификации 200 по фиг. 2. Продемонстрированные входные данные о вытягивании рук 704, нахождении в положении стоя 706 и стоянии на коленях 708 могут представлять собой, например, выходные данные, показанные на фиг. 4, фиг. 5 и фиг. 6.
Как аналогичным образом указано выше, предварительно записанные активности, описанные на втором этапе, представляют верные данные, используемые для обучения классифицирующей системы, которая может представлять собой классифицирующую систему 702 ассоциативной памяти 700. Каждая запись сопровождается выходными данными, такими как выходные данные 710, выходные данные 712 и выходные данные 714, что обеспечивает описание предназначения перемещения. Во время этапа обучения ассоциативная память 700 ассоциирует каждые выходные данные о записях со всеми соответствующими захваченными положениями для классифицирования захваченных соответствующих положений. Выходные данные представляют собой данные, которые выдает классификация, если имеет место совпадение. В данном случае выходные данные известны как «классификатор».
Поскольку иллюстративные варианты реализации захватывают положения в виде совокупностей перемещений, то основная классификация является более гибкой. Эта технология обеспечивает возможность возникновения совпадения в любом месте во время активности с тем, чтобы заключить, что отдельное лицо фактически занималось указанной активностью. В итоге, иллюстративные варианты реализации подчеркивают механику активности, а не ее нюансы. Таким образом, данная технология использует меньшие вычислительные мощности по сравнению с отслеживанием точных положений частей тела отдельного лица. После завершения обучения иллюстративные варианты реализации вводят захваченные данные в ассоциативную память, причем эти новые результаты наблюдения могут быть затем классифицированы по отношению к собранным данным для определения конкретных выходных данных и сбора, при необходимости, количественных показателей.
Для примера установки классифицирующая система могла бы использовать предварительно записанные активности, а именно стояние на коленях, нахождение в положении стоя и вытягивание рук для обучения системы. Это обучение снова представляет собой третий этап в процессе. В классифицирующую систему 702 ассоциативной памяти 700, как показано на фиг. 7, могла бы быть введена полная совокупность.
На фиг. 8 показан пример контроля активностей в соответствии с иллюстративным вариантом реализации. Контроль представляет четвертый этап в начатом выше процессе, причем первый и второй этапы описаны выше согласно фиг. 4-6, а третий этап описан согласно фиг. 7. Система 800 определения кинематики может представлять собой, например, систему 300 определения кинематики по фиг. 3. Система 800 определения кинематики может быть также названа как устройство ввода для регистрации движений.
Во время четвертого этапа контроля система периодически собирает информацию из системы 800 определения кинематики. Система может собирать данную информацию в виде одиночного кадра или множества кадров в зависимости от того, как эта система настроена. Кадр или кадры обеспечивают текущий снимок того, что датчик движения видит в момент времени, в который на этот датчик выдан запрос. Задача состоит в определении того, находится ли отдельное лицо в некотором положении, возможно в предварительно идентифицированном положении, для которого могут быть собраны количественные показатели.
Пятый этап состоит в идентификации захваченного положения с использованием классификации ассоциативной памяти или некоторой другой классифицирующей системы. Ассоциативная память классифицирует положение человека 802 путем сопоставления характеристик неизвестного положения человека 802 с характеристиками ранее записанного известного положения. Следует отметить, что человек 802 не обязательно был тем же человеком, кто демонстрировал положения в рамках обучения, например, предварительно записанные активности. В любом случае система будет классифицировать неизвестное положение соответствующим образом. Если классифицирующая система не сопоставляет любые из предварительно записанных активностей, то затем классифицирующая система будет выдавать в ответ холостой результат и, соответственно, не будет собрано каких-либо количественных показателей.
На фиг. 8 показано, что человек 802 стоит на коленях. Система 800 определения кинематики будет классифицировать человека 802 как находящегося в положении стоя на коленях. Поскольку время стояния на коленях (интересуемый количественный показатель) должно быть записано во время сбора количественных показателей на этапе 6, то будет отслежено количество времени, которое человек 802 проводит в положении стоя на коленях. Это время не обязательно должно представлять собой непрерывный период времени. Например, человек 802 может стоять на коленях в течение определенного времени, может находиться в положении стоя в течение определенного времени таким образом, что количественные показатели более на записываются, снова стоять на коленях, в течение чего записано время, проведенное в положении стоя на коленях, может вытягивать руки в течение определенного времени таким образом, что количественные показатели более не записываются, а затем стоять на коленях в третий раз, в течение которого записано время, проведенное в положении стоя на коленях. Таким образом, на фиг. 8 показаны три различных момента времени, в течение которых записано количество времени, проведенного в положении стоя на коленях, а именно время 804, время 806 и время 808.
Сбор количественных показателей продолжается столько времени, сколько отдельное контролируемое лицо сохраняет интересуемое положение. При отсутствии сбора, способ возвращается к этапу контроля, охарактеризованному на этапе 3, и продолжает до тех пор, пока систему не попросят остановится.
На фиг. 9 показан пример системы для сбора количественных показателей с использованием ассоциативной памяти в соответствии с иллюстративным вариантом реализации. Система 900 определения кинематики может представлять собой, например, систему 102 определения кинематики по фиг. 1 или систему 300 определения кинематики по фиг. 3 или систему 800 определения кинематики по фиг. 8. Компьютер или процессоры, используемые в системе 900 определения кинематики, могут быть реализованы с использованием системы 1500 обработки данных по фиг. 15.
Одна возможная физическая реализация иллюстративных вариантов реализации показана на фиг. 9, хотя возможны и другие физические реализации. Как показано, система 900 определения кинематики использует датчик 902 движения, соединенный с процессором 904, который исполняет программное обеспечение, используемое для реализации иллюстративных вариантов реализации, включая по возможности ассоциативную память. Компьютер, содержащий процессор 904, может включать индикатор 906 режима, используемый для индикации того, находится ли устройство в режиме обучения или в режиме контроля. Компьютер может также содержать индикатор 908 активности для индикации того, должна ли быть изучена данная активность.
Система 900 определения кинематики может содержать дополнительный сетевой провод 910 или батарею. Система 900 определения кинематики может также содержать дополнительный сетевой провод 912 или беспроводное устройство, соединяющее систему 900 определения кинематики с сетью. В любом случае, система 900 определения кинематики может иметь связь с ассоциативной памятью, базой данной или любой другой системой, используемой для реализации иллюстративных вариантов реализации. Однако, в некоторых иллюстративных вариантах реализации все используемое программное обеспечение может содержаться в самом процессоре 904. В других иллюстративных вариантах реализации программное обеспечение может быть вместо этого реализовано в виде специализированной интегральной микросхемы (ASIC).
Система 900 определения кинематики может включать другие дополнительные устройства или объекты. Например, система 900 определения кинематики может включать дополнительную стойку 914 или может быть размещена где-то еще, а датчик 902 движения может легко наблюдать перемещения. Система 900 определения кинематики также может содержать экран 916 или некоторое другое устройство вывода, такое как принтер или другой индикатор, используемый для выдачи в виде отчета или отображения выходных данных. При необходимости, подключаемый принтер 918 может быть обеспечен для печати отчетов, количественных показателей или других выходных данных.
В итоге, дополнительный подключаемый лэптоп 920, планшет, мобильный телефон или другая компьютерная система может быть использована для помощи в настройке или оптимизации системы 900 определения кинематики. Кроме того, подключаемый лэптоп 920 может также быть использован для обновления программного обеспечения так, как это необходимо.
Процессор 904 или подключаемый лэптоп 920 может быть использован как часть системы для сбора количественных показателей о положениях человека или объекта. Таким образом, например, процессор 904 или подключаемый лэптоп 920 может быть использован совместно с ассоциативной памятью, соединенной с одним из этих устройств, для контроля человека или объекта, классификации положений человека или объекта и для последующего сбора количественных показателей о конкретных положениях человека или объекта, как описано выше.
Другими словами, одна возможная реализация иллюстративных вариантов реализации показана на фиг. 9. Как показано, система 900 определения кинематики использует датчик 902 движения, соединенный с центральным процессором (CPU), содержащим программное обеспечение, пригодное для реализации иллюстративных вариантов реализации. Центральный процессор (CPU) может иметь индикатор 906 режима, используемый для переключения режимов. Например, центральный процессор (CPU) может быть настроен на обучение или контроль. Индикатор 908 активности может обеспечить возможность выбора пользователем предварительно определенной активности для идентификации того, для какой активности обучают систему. Например, эти индикаторы могут соответствовать дополнительному перечню, который объясняет то, какие активности оказались захваченными.
Иллюстративный вариант реализации может содержат дополнительный кабель 910 питания или батарею. Иллюстративный вариант реализации может также содержать дополнительный сетевой кабель 912 или беспроводное устройство, соединяющее его с сетью, так что можно получить доступ к регистрационным данным в ассоциативной памяти, базе данных или любой другой системе. Однако, существует возможность разместить все необходимое программное обеспечение для иллюстративных вариантов реализации в самом центральном процессоре (CPU).
Иллюстративные варианты реализации могут содержать дополнительную стойку 914 или могут быть размещены где-то еще. Иллюстративные варианты реализации могут содержать информирующий блок вывода данных, такой как экран 906, используемый для отображений результатов количественных показателей, которые он собрал. Дополнительный подключаемый лэптоп 920 может быть использован для помощи в настройке, обновлении или оптимизации иллюстративных вариантов реализации. Другой вариант мог бы содержать подключаемый принтер 918, что обеспечивает возможность пользователю получить доступ к печатным копиям отчетов или количественным показателям на месте.
Иллюстративные варианты реализации, показанные на фиг. 9, не направлены на введение физических или архитектурных ограничений способом, согласно которому иллюстративные варианты реализации могут быть реализованы. Другие компоненты могут быть использованы в дополнение к показанным компонентам и/или вместо них. В некоторых иллюстративных вариантах реализации некоторые компоненты могут быть необязательными. Кроме того, блоки представлены для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть объединены и/или разделены на различные блоки при реализации в различных иллюстративных вариантах реализации.
На фиг. 10 показан пример сравнения субъекта с выходными данными как результирующей категории в соответствии с иллюстративным вариантом реализации. Сравнение 1000 субъекта представляет собой пример того, как ассоциативная память, такая как ассоциативная память 104 по фиг. 1, может классифицировать неизвестные входные данные по отношению к совокупности обучающих положений, как описано выше согласно фиг. 4-9.
Одна возможная реализация иллюстративных вариантов реализации состоит в использовании недорогого датчика движения для захвата интересуемых действий и базы данных на основе языка структурированных запросов (SQL) для их записи. Затем ассоциативная память может быть использована для классифицирования новых результатов измерений, выданных датчиком движения, в зависимости от предварительно записанных.
Для данной реализации пользователь может установить предварительно определенную базу данных и может ввести данные для обучения, захваченные датчиком движения. Выходные данные для обучения могут быть маркированы надлежащим образом в соответствии с каждым положением, для которого были необходимы количественные показатели. Затем, с использованием ассоциативной памяти, пользователь мог бы усвоить эти данные в ассоциативную память для классификации новых результатов наблюдения по отношению к тем данным. Выходные данные могли бы быть использованы как общий классификатор.
После усвоения, пользователь может может иметь периодически захватываемые системой данные о перемещении от датчика движения и выполнять сравнение субъекта по отношению к захваченным данным для упорядочивания других перемещений, таких как это. Результирующая категория сравнения субъекта могла бы быть задана как «выходные данные». В итоге, новый результат наблюдения мог бы адаптировать выходные данные о перемещении, с которыми он наиболее часто идентифицируется, как показано на фиг. 10. Таким образом, например, совокупность общих атрибутов 1002, которые принадлежат выходным данным 1004 о «нахождении в положении стоя», совпадает с атрибутами нового результата наблюдения 1006. Оценка 1008 может иметь масштаб от нуля до единицы и представлять близость совпадения неизвестных атрибутов входных данных с продемонстрированным положением или атрибутами активности. Для оценки 1008 могут быть использованы и другие формы оценок или шкал.
Обычно, результаты сравнения субъекта представляют собой упорядоченный перечень субъектов, которые являются «аналогичными» исходному или желаемому субъекту или «схожи» с ним. Ассоциативная память собирает все атрибуты для сопоставления среди этих субъектов для формулирования перечня. Порядок этого перечня зависит от значимости атрибутов для сопоставления. Кроме того, его ранг или оценка соотносится к количеством выявленных атрибутов.
Для обеспечения более ясного результата, система может выполнить сравнение субъекта с использованием предварительно определенных выходных данных в качестве результирующей категории. Память может быть перенастроена на то, чтобы каждый субъект был сам ассоциирован с конкретными выходными данными, такими как стояние на коленях, нахождение в положении стоя или вытягивание рук. Данная технология представляет собой эффективный способ классифицирования новых результатов наблюдения с использованием результирующей категории, в данном случае выходных данных, в качестве общего классификатора.
Иллюстративные варианты реализации могут быть применены к частным компаниям, правительственным учреждениям или другим организациям, которые заинтересованы в сборе количественных показателей, касающихся того, как сотрудники выполняют свои ежедневные задачи. Иллюстративные варианты реализации обеспечивают возможность крупным производителям собирать такие количественные показатели непренудительным образом.
Например, любая компания, которая берет на работу персонал по коллективному договору или подпадает под действие требований профсоюзов, может использовать иллюстративные варианты реализации. Данные собирают ненавязчивым образом и записывают способом, согласно которому идентификация отдельных лиц является физически невозможной. Эти преимущества обеспечивают возможность контроля и возможность сбора количественных показателей в рабочих средах, в которых запрещен видеоконтроль отдельных лиц.
Иллюстративные варианты реализации обеспечивают эффективный способ контроля и измерения активностей в областях, в которых их реализация может быть затруднительной. Кроме того, иллюстративные варианты реализации могут обеспечить количественные показатели для положений, которые сложно измерять каким-либо образом.
Иллюстративные варианты реализации обеспечивают экономически выгодный способ сбора количественных показателей о том, как долго работник сохраняет потенциально опасное положение, что помогает предотвратить увеличение затрат на медицинское обслуживание. Иллюстративные варианты реализации могут быть использованы для сбора количественных показателей о безопасности, которые компания может использовать для количественного определения результатов, когда пытается установить родственные задачи по обеспечению безопасности. Иллюстративные варианты реализации могут быть использованы на заводе для оценки задач обеспечения безопасности и для демонстрации примеров хороших и плохих поз. Иллюстративные варианты реализации могут быть использованы для измерения частоты повторения нарушений движения с надеждой на их предотвращение. Иллюстративные варианты реализации могут быть использованы для измерения того, как часто неправильная эргономика возникает в офисном здании с надеждой на обучение сотрудников. Иллюстративные варианты реализации могут обеспечить количественные показатели о положениях, которые в других случаях оказывается невозможно измерить. Данный факт может быть использован в местах, в которых контролирующие лица подозревают, что конкретные производственные задачи могут нанести ущерб. Существуют и другие преимущества.
На фиг. 11 показана блок-схема способа идентификации интересуемого движения отдельного человека в соответствии с иллюстративным вариантом реализации. Способ 1100 может представлять собой сочетание шести этапов, описанных согласно фиг. 4-8. Однако, могут быть выполнены большее количество или меньшее количество операций. Способ 1100 может быть реализован с использованием любой из систем, описанных на фиг. 1-3, а также на фиг. 8-9. Например, ссылка на «систему» может представлять собой ссылку на систему 900 по фиг. 9, однако может ссылаться и на другое устройство для выполнения описанных далее операций.
Способ 1100 может начинаться с идентификации системой положений для их измерения (операция 1102). Эти положения могут представлять собой положения или активности человека или объекта. Система затем записывает идентифицированные положения (операция 1104). Идентифицированные положения могут быть записаны пользователем или объектом, выполняющим эти положения или активности, которые в дальнейшем необходимо контролировать.
Способ 1100 продолжается с обучения классификации ассоциативной памяти с использованием записанных положений (операция 1106). Ассоциативная память может быть обучена путем выдачи команды для ассоциативной памяти для усвоения записанных положений.
Затем система контролирует положения человека или объекта с использованием устройства ввода для регистрации движений или устройства для определения кинематики (операция 1108). Эти операции описаны согласно фиг. 8. Система затем идентифицирует положение человека или объекта, представленного входными данными, с использованием классификации ассоциативной памяти (операция 1110). Данная операция также описана согласно фиг. 8. Если положение представляет собой одно из идентифицированных положений, то затем количественные показатели собирают для данного положения (операция 1112). Данная операция также описана согласно фиг. 8.
Затем определяют необходимость продолжения контроля (операция 1114). Если контроль необходимо продолжить, то затем способ 1100 возвращается к операции 1108 и продолжается. Если нет необходимости в продолжении контроля, то затем процесс может и закончиться.
Иллюстративные варианты реализации, показанные на фиг. 11, не направлены на обеспечение физических или архитектурных ограничения способом, согласно которому могут быть реализованы иллюстративные варианты реализации. Могут быть использованы и другие компоненты в дополнение к показанным компонентам и/или вместо них. В некоторых иллюстративных вариантах реализации некоторые компоненты могут быть необязательными. Кроме того, блоки представлены для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть объединены и/или разделены на различные блоки при реализации в различных иллюстративных вариантах реализации.
На фиг. 12 показана другая блок-схема способа идентификации интересуемого движения отдельного человека в соответствии с иллюстративным вариантом реализации. Способ 1200 представляет собой вариант способа 1100. Таким образом, способ 1100 может представлять собой сочетание шести этапов, описанных согласно фиг. 4-8. Однако, могут быть выполнены больше или меньшее количество операций. Способ 1100 может быть реализован с использованием любой из систем, описанных на фиг. 1-3, а также фиг. 8-9. Например, ссылка на «систему» может представлять собой ссылку на систему 900 по фиг. 9, хотя может ссылаться и на другое устройство для выполнения описанных далее операций.
Способ 1200 может быть охарактеризован как способ идентификации интересуемого движения отдельного человека. Способ 1200 может включать сбор, в компьютере, входных данных датчика движения о движениях отдельного лица от датчика движения в течение определенного интервала времени (операция 1202). Затем, способ 1200 может включать анализ, с использованием компьютера, входных данных датчика движения с использованием приложения для анализа, имеющего совокупность классифицированных предварительно определенных интересуемых движений и классифицирующего перемещение, захваченное во время указанного интервала времени, в качестве движения, соответствующего одному из множества предварительно определенных интересуемых движений на основании общих относительных атрибутов (операция 1204). Затем, способ 1200 может включать генерирование выходных данных с обеспечением выдачи уведомления об идентифицированном предварительно определенном интересуемом движении на контролирующую систему (операция 1206). После этого процесс может завершаться.
Однако способ 1200 может быть изменен, а также может включать большее или меньшее количество операций. Например, способ 1200 может дополнительно включать систему, создающую выходной предупредительный сигнал, когда идентифицированное предварительно определенное интересуемое движение превышает предварительно определенное пороговое значение. Способ 1200 может дополнительно включать, в ответ на прием уведомления, сбор количественных показателей об интересуемом движении. Способ 1200 может дополнительно включать, в ответ на прием уведомления, сбор количественных показателей о дополнительных перемещениях отдельным лицом.
Иллюстративные варианты реализации, показанные на фиг. 12 не направлены на обеспечение физических или архитектурных ограничений способом, согласно которому иллюстративные варианты реализации могут быть реализованы. Другие компоненты могут быть использованы в дополнение к показанным компонентам и/или вместо них. В некоторых иллюстративных вариантах реализации некоторые компоненты могут быть необязательными. Кроме того, блоки представлены для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть объединены и/или разделены на различные блоки при реализации в различных иллюстративных вариантах реализации.
На фиг. 13 показано устройство для идентификации интересуемого движения отдельного человека в соответствии с иллюстративным вариантом реализации. Устройство 1300 может представлять собой вариант системы 900 по фиг. 9. Устройство 1300 может быть охарактеризовано как устройство для идентификации интересуемого движения отдельного человека.
Устройство 1300 может включать датчик движения 1302. Датчик движения 1302 может быть выполнен неинвазивным. Устройство 1300 может также содержать компьютер 1304, имеющий связь с датчиком движения и выполненный с возможностью сбора данных датчика движения о движениях отдельного лица от датчика движения 1302 в течение определенного интервала времени. Компьютер 1304 может представлять собой, например, систему 1500 обработки данных по фиг. 15.
Устройство 1300 может также содержать считываемый компьютером носитель 1306 данных для длительного хранения данных, хранящий приложение 1308 для анализа, имеющее совокупность классифицированных предварительно определенных интересуемых движений. Приложение 1308 для анализа может быть дополнительно выполнено таким образом, что после его исполнения компьютером 1304, это приложение 1308 для анализа классифицирует перемещение отдельного лица, захваченное во время указанного интервала времени, в качестве движения, соответствующего одному из множества предварительно определенных интересуемых движений на основании общих относительных атрибутов. Приложение 1308 для анализа может быть дополнительно выполнено с возможностью, после его исполнения, генерировать выходные данные с обеспечением выдачи уведомления об идентифицированном предварительно определенном интересуемом движении на контролирующую систему.
Устройство 1300 может быть изменено. Например, процессор может быть дополнительно выполнен с возможностью генерирования выходного предупредительного сигнала, когда идентифицированное предварительно определенное интересуемое движение превышает предварительно определенное пороговое значение. Компьютер 1304 может быть дополнительно выполнен с возможностью, в ответ на прием уведомления, сбора количественных показателей об интересуемом движении. Компьютер 1304 может быть дополнительно выполнен с возможностью, в ответ на прием уведомления, сбора количественных показателей о дополнительных перемещениях отдельного лица.
Иллюстративные варианты реализации, показанные на фиг. 13, не направлены на обеспечение физических или архитектурных ограничений способом, согласно которому иллюстративные варианты реализации могут быть реализованы. Другие компоненты могут быть использованы в дополнение к показанным компонентам и/или вместо них. В некоторых иллюстративных вариантах реализации некоторые компоненты могут быть необязательными. Кроме того, блоки представлены для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть объединены и /или разделены на различные блоки при реализации в различных иллюстративных вариантах реализации.
На фиг. 14 показана система для уведомления контролирующей системы о том, когда конкретное движение совпадает с одним из множества предварительно определенных движений в соответствии с иллюстративным вариантом реализации. Система 1400 может представлять собой вариант системы 900 по фиг. 9 и системы 1400 по фиг. 14.
Система 1400 может включать измерительное устройство 1402 для измерения кинематики, содержащее один или более датчиков 1404, выполненных с возможностью определения множества физических положений части объекта 1406. Система 1400 может также содержать ассоциативную память 1408, имеющую связь с измерительным устройством 1402 для измерения кинематики. Ассоциативная память 1408 может включать множество данных и множество ассоциаций среди этого множества данных. Множество данных собрано в ассоциированные группы. Ассоциативная память выполнена с возможностью выдачи на нее запроса на основании по меньшей мере непрямых взаимосвязей среди множества данных.
Система 1400 может дополнительно содержать процессор 1410. Процессор 1410 может иметь связь с ассоциативной памятью 1408 и измерительным устройством 1402 для измерения кинематики. Процессор 1410 может быть выполнен с возможностью приема входных данных о движении объекта из измерительного устройства 1402 для измерения кинематики, возможностью сравнения, совместно с ассоциативной памятью 1408, входных данных о движении со множеством предварительно определенных движений, сохраненных в ассоциативной памяти 1408, возможностью классифицирования входных данных о движении как конкретно движения, выбранного из указанного множества предварительно определенных движений, и с возможностью уведомления контролирующей системы 1412 о том, когда конкретное движение совпадает с одним из субсовокупности из указанного множества предварительно определенных движений. Контролирующая система 1412 может быть выполнена с возможностью контроля количественных показателей для предварительно определенных движений.
Например, процессор 1401 может быть дополнительно выполнен с возможностью вызывать то, чтобы контролирующая система 1412 измеряла дополнительные перемещения объекта, когда конкретное движение совпадает с одним из субсовокупности из множества предварительно определенных движений. Контролирующая система 1412 может быть выполнена с возможностью контроля количества времени, которое объект проводит в предварительно определенном положении.
В другом иллюстративном варианте реализации процессор 1410 совместно с ассоциативной памятью 1408 может быть выполнен с возможностью выдачи оценки дополнительных перемещений объекта. В иллюстративном варианте реализации субсовокупность может быть основана на критерии, выбранном пользователем.
В иллюстративном варианте реализации объект может представлять собой человека. В иллюстративном варианте реализации субсовокупность может представлять собой по меньшей мере одно нежелательное положение тела человека. В иллюстративном варианте реализации дополнительные движения могут представлять собой все движения человека в течение определенного интервала времени. В иллюстративном варианте реализации дополнительные движения могут представлять собой только те движения, которые находятся в пределах субсовокупности в течение определенного интервала времени.
В иллюстративном варианте реализации контролирующая система 1412 может контролировать движения части тела отдельного лица человека. В иллюстративном варианте реализации процессор 1410 может быть дополнительно выполнен с возможностью уведомления контролирующей системы 1412, когда движения человека более не находятся в субсовокупности.
В иллюстративном варианте реализации процессор 1410 может быть дополнительно выполнен с возможностью выдачи команды на контролирующую систему 1412 для прекращения контроля человека, когда эти движения этого человека находятся за пределами субсовокупности. В иллюстративном варианте реализации ассоциативная память 1408 может быть выполнена с возможностью ее обучения с тем, чтобы содержать дополнительное предварительно определенное движение во множестве предварительно определенных движений и содержать дополнительное движение в субсовокупности из этого множества предварительно определенных движений.
Также возможны и другие альтернативные варианты. Таким образом, иллюстративные варианты реализации, показанные на фиг. 14, не направлены на обеспечение физических или архитектурных ограничений способом, согласно которому иллюстративные варианты реализации могут быть реализованы. Другие компоненты могут быть использованы в дополнение к показанным компонентам и/или вместо них. В некоторых иллюстративных вариантах реализации некоторые компоненты могут быть необязательными. Кроме того, блоки представлены для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть объединены и/или разделены на различные блоки при реализации в различных иллюстративных вариантах реализации.
На фиг. 15 показано изображение системы обработки данных в соответствии с иллюстративным вариантом реализации. Система 1500 обработки данных на фиг. 15 представляет собой пример системы обработки данных, которая может быть использована для реализации иллюстративных вариантов реализации, такой как система 102 определения кинематики по фиг. 1, операция 1204 или дополнительный подключаемый лэптоп 920 по фиг. 9, компьютер 1304 по фиг.13, процессор 1410 по фиг. 14, считываемая компьютером среда 1520 по фиг. 15 или любой другой модуль или система, или процесс, описанные в настоящей заявке. В данном иллюстративном примере система 1500 обработки данных содержит волокно 1502 связи, которое обеспечивает связь между процессорным блоком 1504, памятью 1506, запоминающим устройством 1508 для длительного хранения данных, блоком 1510 связи, блоком 1512 ввода-вывода (I/O) и дисплеем 1514.
Процессорный блок 1504 служит для исполнения инструкций программного обеспечения, которые могут быть загружены в память 1506. Данное программное обеспечение может представлять собой любую из ассоциативной памяти, описанной в одном из разделов настоящей заявки, или программное обеспечение для реализации процессов, описанное в одном из разделов настоящей заявки. Таким образом, например, программное обеспечение, загруженное в память 1506, может представлять собой программное обеспечение для исполнения способа 1100 по фиг. 11, способа 1200 по фиг. 12 или для реализации шести этапов, описанных выше согласно фиг. 4-8. Процессорный блок 1504 может представлять собой определенное количество процессоров, многопроцессорное ядро или некоторый другой тип процессора в зависимости от конкретной реализации. Определенное количество, как использовано в настоящей заявке со ссылкой на объект, означает один или более объектов. Кроме того, процессорный блок 1504 может быть реализован с использованием определенного количества гетерогенных процессорных систем, в которых основной процессор представлен вторичными процессорами на одном кристалле. В качестве другого иллюстративного примера, процессорный блок 1504 может представлять собой асимметричную многопроцессорную систему, содержащую множество процессоров того же самого типа.
Память 1506 и запоминающее устройство 1508 для длительного хранения данных представляют собой примеры запоминающих устройств 1516. Запоминающее устройство представляет собой любую часть аппаратных средств, которые выполнены с возможностью хранения информации, такой как, например, без ограничения, данные, программный код в функциональной форме и/или другую подходящую информацию на временной основе и/или постоянной основе. В этих примерах запоминающие устройства 1516 могут быть также названы как считываемые компьютером запоминающие устройства. Память 1506 в этих примерах может представлять собой, например, оперативное запоминающее устройство или любое другое подходящее энергонезависимое или энергозависимое запоминающее устройство. Запоминающее устройство 1508 для длительного хранения данных может принимать различные формы в зависимости от конкретной реализации.
Например, запоминающее устройство 1508 для длительного хранения данных может содержать один или более компонентов или устройства. Например, запоминающее устройство 1508 для длительного хранения данных может представлять собой жесткий диск, флешь-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или их комбинацию. Среда, использованная запоминающим устройством 1508 для длительного хранения данных, также может быть выполнена с возможностью замены. Например, сменный жесткий диск может быть использован для запоминающего устройства 1508 для длительного хранения данных.
Блок 1510 связи в этих примерах обеспечивает связь с другими системами обработки данных или устройствами. В этих примерах блок 1510 связи представляет собой сетевую интерфейсную карту. Блок 1510 связи может обеспечивать связь путем использования физических линий связи и/или беспроводных линий связи.
Блок 1512 ввода-вывода (I/O) обеспечивает возможность ввода и вывода данных с использованием других устройств, которые могут быть соединены с системой 1500 обработки данных. Например, блок 1512 ввода-вывода (I/O) может обеспечивать передачу входных данных пользователя через клавиатуру, манипулятор мышь и/или некоторое другое подходящее устройство ввода. Кроме того, блок 1512 ввода-вывода (I/O) может отправлять выходные данные на принтер. Дисплей 1514 обеспечивает механизм отображения информации для пользователя.
Инструкции для операционной системы, приложений и/или программ могут быть размещены в запоминающих устройствах 1516, которые имеют связь с процессорным блоком 1504 посредством волокна 1502 связи. В этих иллюстративных примерах инструкции расположены в функциональной форме на запоминающем устройстве 1508 для длительного хранения данных. Эти инструкции могут быть загружены в память 1506 для исполнения процессорным блоком 1504. Процессы различных вариантов реализации могут быть выполнены процессорным блоком 1504 с использованием реализуемых компьютером инструкций, которые могут быть размещены в памяти, такой как память 1506.
Эти инструкции названы как программный код, используемый компьютером программный код или считываемый компьютером программный код, который может быть считан и исполнен процессором в процессорном блоке 1504. Программный код в различных вариантах реализации может быть реализован на различном физическом или считываемом компьютером носителе, таком как память 1506 или запоминающее устройство 1508 для длительного хранения данных.
Программный код 1518 расположен в функциональной форме в считываемой компьютером среде 1520, которая выполнена с возможностью выборочной замены, и может быть загружен в систему 1500 обработки данных или передан с ее использованием для исполнения процессорным блоком 1504. В этих примерах программный код 1518 и считываемая компьютером среда 1520 формируют компьютерный программный продукт 1522. В одном примере считываемая компьютером среда 1520 может представлять собой считываемый компьютером носитель 1524 данных или считываемые компьютером среды 1526 передачи сигналов. Считываемый компьютером носитель 1524 данных может включать, например, оптический или магнитный диск, который вставлен или размещен в привод, или другое устройство, которое представляет собой часть запоминающего устройства 1508 для длительного хранения данных для передачи в запоминающее устройство, такое как жесткий диск, который представляет собой часть запоминающего устройства 1508 для длительного хранения данных. Считываемый компьютером носитель 1524 данных также может принимать форму запоминающего устройства для длительного хранения данных, такого как жесткий диск, флешка или флешь-память, которая соединена с системой 1500 обработки данных. В некоторых примерах считываемый компьютером носитель 1524 данных может быть и не выполнен с возможностью удаления из системы 1500 обработки данных.
В альтернативном варианте программный код 1518 может быть передан в систему обработки данных 1500 с использованием считываемых компьютером сред 1526 передачи сигналов. Считываемые компьютером среды 1526 передачи сигналов могут представлять собой, например, распространяемый сигнал данных, содержащий программный код 1518. Например, считываемые компьютером среды 1526 передачи сигналов могут представлять собой электромагнитный сигнал, оптический сигнал и/или любой другой подходящий тип сигнала. Эти сигналы могут быть переданы по линиям связи, таким как беспроводные линии связи, оптоволоконный кабель, коаксиальный кабель, провод и/или любой другой подходящий тип линии связи. Другими словами, в иллюстративных примерах линия связи и/или соединение могут быть физическими или беспроводными.
В некоторых иллюстративных вариантах реализации программный код 1518 может быть скачен по сети на запоминающее устройство 1508 для длительного хранения данных из другого устройства или другой системы обработки данных через считываемые компьютером среды 1526 передачи сигналов для использования в системе 1500 обработки данных. Например, программный код, хранящийся в считываемом компьютером носителе данных для длительного хранения данных в системе обработки данных сервера, может быть скачен по сети из этого сервера на систему 1500 обработки данных. Система обработки данных, обеспечивающая программный код 1518, может представлять собой серверный компьютер, клиентский компьютер или некоторое другое устройство, выполненное с возможностью хранения и передачи программного кода 1518.
Различные компоненты, показаннные для системы 1500 обработки данных, не направлены на обеспечение архитектурных ограничений способом, согласно которому могут быть реализованы различные варианты реализации. Различные иллюстративные варианты реализации могут быть реализованы в системе обработки данных, содержащей компоненты в дополнение к компонентам, показанным для системы 1500 обработки данных, или вместо них. Другие компоненты, показанные на фиг. 15, могут отличаться от показанных иллюстративных примеров. Различные варианты реализации могут быть реализованы с использованием любого аппаратного устройства или системы, выполненной с возможностью запуска программного кода. В качестве одного примера, система обработки данных могут включать органические компоненты, выполненные за одно целое с неорганическими компонентами, и/или может быть полностью образована из органических компонентов за исключением самого человека. Например, запоминающее устройство может быть образовано из органического полупроводника.
В другом иллюстративном примере процессорный блок 1504 может принимать форму аппаратного блока, который имеет схемы, которые изготовлены или выполнены для конкретного использования. Другой тип аппаратных средств может выполнять операции без необходимости в загрузке программного кода в память из запоминающего устройства с тем чтобы настроить его на выполнение этих операций.
Например, когда процессорный блок 1504 принимает форму аппаратного блока, процессорный блок 1504 может представлять собой систему схем, специализированную интегральную микросхему (ASIC), программируемое логическое устройство или некоторый другой подходящий тип аппаратных средств, выполненных с возможностью выполнения определенного количества операций. При использовании программируемого логического устройства, это устройство выполнено с возможностью выполнения определенного количества операций. Это устройство в дальнейшем может быть перенастроено или может быть на постоянной основе выполнено с возможностью реализации определенного количества операций. Примеры программируемых логических устройств содержат, например, программируемую логическую матрицу, программируемую логическую матричную схему, логическую матрицу с эксплуатационным программированием, вентильную матрицу с эксплуатационным программированием или другие подходящие аппаратные устройства. При использовании данного типа реализации, программный код 1518 может быть опущен, поскольку процессы для различных вариантов реализации реализованы в аппаратном блоке.
Еще в одном иллюстративном примере процессорный блок 1504 может быть реализован с использованием комбинации процессоров, выполненных в компьютерах и аппаратных блоках. Процессорный блок 1504 может иметь определенное количество аппаратных блоков и определенное количество процессоров, которые выполнены с возможностью запуска программного кода 1518. С использование данного показанного примера, некоторые из процессов могут быть реализованы в определенном количестве аппаратных блоков, а другие процессы могут быть реализованы в определенном количестве процессоров.
В качестве другого примера, запоминающее устройство в системе 1500 обработки данных представляет собой любое аппаратное устройство, которое может хранить данные. Память 1506, запоминающее устройство 1508 для длительного хранения данных и считываемая компьютером среда 1520 представляют собой примеры запоминающих устройств в материальной форме.
В другом примере система шин может быть использована для реализации волокна 1502 связи и может быть образована из одной или более шин, таких как система шин или шина ввода-вывода. Безусловно, система шин может быть реализована с использованием любого подходящего типа архитектуры, который обеспечивает передачу данных между различными компонентами или устройствами, прикрепленными к системе шин. Кроме того, блок связи может включать одно или более устройств, используемых для передачи и приема данных, таких как модем или сетевой адаптер. Кроме того, память может представлять собой, например, память 1506 или кэш-память, такую как установленную на контроллере-концентраторе интерфейса памяти, который может быть представлен в волокне 1502 связи.
Система 1500 обработки данных может также содержать ассоциативную память 1528. Ассоциативная память 1528 может представлять собой ассоциативную память 104 по фиг. 1, ассоциативную память 700 по фиг. 1, приложение 1308 для анализа по фиг. 13, ассоциативную память 1408 по фиг. 14 или другие ассоциативные памяти, описанные в других разделах настоящей заявки, а также может иметь свойства, описанные в других разделах настоящей заявки. Ассоциативная память 1528 может иметь связь с волокном 1502 связи. Ассоциативная память 1528 также может иметь связь с запоминающими устройствами 1516 или в некоторых иллюстративных вариантах реализации может считаться частью этих запоминающих устройств 1516. Несмотря на то, что показана одна ассоциативная память 1528, могут быть представлены дополнительные ассоциативные памяти.
Как использовано в настоящей заявке, термин «ассоциативная память» относится к множеству данных и множеству ассоциаций среди этого множества данных. Множество данных и множество связей могут быть сохранены в считываемый компьютером носителе данных для длительного хранения данных. Множество данных может быть собрано в ассоциированные группы. Ассоциативная память может быть выполнена с возможностью выдачи на нее запроса на основании по меньшей мере непрямых взаимосвязей среди множества данных в дополнение к прямым связям среди этого множества данных. Таким образом, ассоциативная память может быть выполнена с возможностью выдачи на нее запроса исключительно на основании прямых взаимосвязей, исключительно на основании по меньшей мере непрямых взаимосвязей, а также на основании сочетаний прямых и по меньшей мере непрямых взаимосвязей. Ассоциативная память может представлять собой адресуемую содержимым память.
Таким образом, ассоциативная память может быть охарактеризована в качестве множества данных и множества ассоциаций среди этого множества данных. Множество данных может быть собрано в ассоциированные группы. Кроме того, ассоциативная память может быть выполнена с возможностью запроса на основании по меньшей мере одной взаимосвязи, выбранной из группы, которая содержит прямые и по меньшей мере непрямые взаимосвязи, или из множества данных в дополнение к прямым связям среди этого множества данных. Ассоциативная память может также принимать форму программного обеспечения. Таким образом, ассоциативная память также может считаться процессом, посредством которого информация собрана в ассоциированные группы в интересах получения нового понимания на основании взаимосвязей, а не прямой связи. Ассоциативная память может также принимать форму аппаратных средств, таких как специализированные процессоры или вентильная матрица с эксплуатационным программированием.
Как использовано в настоящей заявке, термин «субъект» относится к объекту, который имеет отличающуюся, отдельную сущность, несмотря на то, что такая сущность не обязательно должна представлять собой материальную сущность. Таким образом, абстрактные структуры и допускаемые законом конструкции могут считаться субъектами. Как использовано в настоящей заявке, субъект не обязательно должен быть одушевленным. Ассоциативная память работает с этими субъектами.
Различные иллюстративные варианты реализации могут принимать форму образованного полностью из аппаратных средств варианта реализации или образованного полностью из программного обеспечения варианта реализации, или варианта реализации, содержащего элементы аппаратных средств и программного обеспечения. Некоторые варианты реализации реализованы в программном обеспечении, которое содержит, но не ограничено, формы, такие как, например, программно-аппаратные средства, резидентное программное обеспечения и микрокод.
Кроме того, различные варианты реализации могут принимать форму компьютерного программного продукта, выполненного с возможностью доступа из используемой компьютером или считываемой компьютером среды, обеспечивающей программный код для использования компьютером или по отношению к нему или любому другому устройству или системе, которая исполняет инструкции. Для целей данного описания, используемая компьютером или считываемая компьютером среда может представлять собой любое реальное устройство, которое может содержать, хранить, сообщать, распространять или передавать программу для использования системой исполнения инструкций, устройством или прибором или для использования вместе системой исполнения инструкций, устройством или прибором.
Используемая компьютером или считываемая компьютером среда может представлять собой, например, без ограничения электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему или среду распространения. Неограничивающие примеры считываемой компьютером среды содержат полупроводник или твердотельную память, магнитную ленту, сменную компьютерную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. Оптические диски могут включать постоянное запоминающее устройство на компакт-диске (CD-ROM), компакт-диск для чтения/записи (CD-R/W) и цифровой видео-диск (DVD).
Кроме того, используемая компьютером или считываемая компьютером среда может содержать или хранить считываемый компьютером или используемый компьютером программный код таким образом, что когда считываемый компьютером или используемый компьютером программный код исполняется на компьютере, то указанное исполнение данного считываемого компьютером или используемого компьютером программного кода вызывает то, что этот компьютер передает другой считываемый компьютером или используемый компьютером программный код по линии связи. Эта линия связи может использовать среду, которая представляет собой, например без ограничения, физическую среду или беспроводную среду.
Система обработки данных, подходящая для хранения и/или исполнения считываемого компьютером или используемого компьютером программного кода, будет содержать один или более процессоров, соединенных прямо или косвенно с элементами памяти через волокно связи, такое как системная шина. Элементы памяти могут включать локальную память, используемую во время фактического исполнения программного кода, внешнее запоминающее устройство и кэш-память, которая обеспечивает временное хранение по меньшей мере некоторой части считываемого компьютером или используемого компьютером программного кода для уменьшения количества временного кода, который может быть извлечен из внешнего запоминающего устройства во время исполнения этого кода.
Устройства ввода-вывода или I/О-устройства могут быть соединены с системой прямо или через промежуточные контроллеры ввода-вывода (I/O). Эти устройства могут включать, например, без ограничения, клавиатуры, сенсорные дисплеи и координатно-указательные устройства. Также с системой могут быть соединены различные адаптеры линий связи для обеспечения возможности системе обработки данных оказаться соединенной с другими системами обработки данных или удаленными принтерами, или запоминающими устройствами через промежуточные частные или открытые сети. Неограничивающие примеры модемов и сетевых адаптеров представляют собой только небольшое количество из доступных в настоящее время типов адаптеров линий связи.
Описание различных иллюстративных вариантов реализации было представлено для целей иллюстрации и описания, при этом не следует считать, что оно исчерпано или ограничено вариантами реализации, имеющими раскрытую в настоящей заявке форму. Специалистам в данной области техники будут очевидны многие модификации и изменения. Кроме того, различные иллюстративные варианты реализации могут обеспечивать различные признаки по сравнению с другими иллюстративными вариантами реализации. Выбранный вариант реализации или выбранные варианты реализации отобраны и описаны для наилучшего пояснения принципов этих вариантов реализации и практического применения, а также для обеспечения специалистам в данной области техники возможности понять сущность различных вариантов реализации с различными модификациями, которые подходят для конкретного предполагаемого использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОБЫТИЯ | 2015 |
|
RU2681353C2 |
| МЕХАНИЗМ ДЛЯ ОЦЕНКИ РИСКОВ БЕЗОПАСНОСТИ | 2003 |
|
RU2334363C2 |
| КЛАССИФИКАЦИЯ ДОКУМЕНТОВ ПО УРОВНЯМ КОНФИДЕНЦИАЛЬНОСТИ | 2019 |
|
RU2732850C1 |
| МОДУЛЬ ВИДЕОАНАЛИЗА И СПОСОБ ФОРМИРОВАНИЯ МАТЕРИАЛОВ РАССЛЕДОВАНИЯ ПОВЕДЕНИЯ ПОЛЬЗОВАТЕЛЯ | 2014 |
|
RU2753959C2 |
| АВТОМАТИЧЕСКОЕ ИЗВЛЕЧЕНИЕ ЛИЦ ДЛЯ ИСПОЛЬЗОВАНИЯ ВО ВРЕМЕННОЙ ШКАЛЕ ЗАПИСАННЫХ КОНФЕРЕНЦИЙ | 2005 |
|
RU2398277C2 |
| СИСТЕМА МОНИТОРИНГА РАБОТОСПОСОБНОСТИ ПЛАТФОРМЫ | 2013 |
|
RU2670907C9 |
| СИСТЕМА РАСПОЗНАВАНИЯ ПОВЕДЕНИЯ | 2008 |
|
RU2475853C2 |
| СТАНДАРТНЫЕ ЖЕСТЫ | 2010 |
|
RU2534941C2 |
| Искусственная имитация излучений химического соединения | 2014 |
|
RU2687149C2 |
| СИСТЕМА И СПОСОБ ДЛЯ РАСПОЗНАВАНИЯ ПОЛЬЗОВАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2717878C2 |
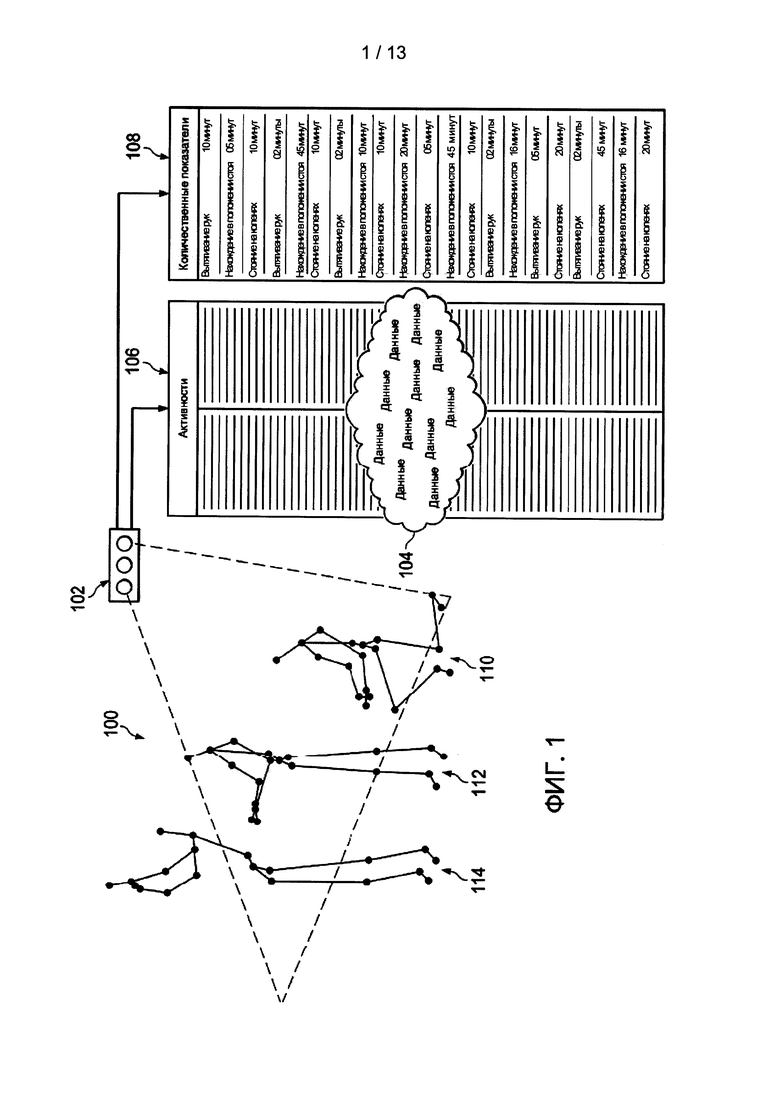
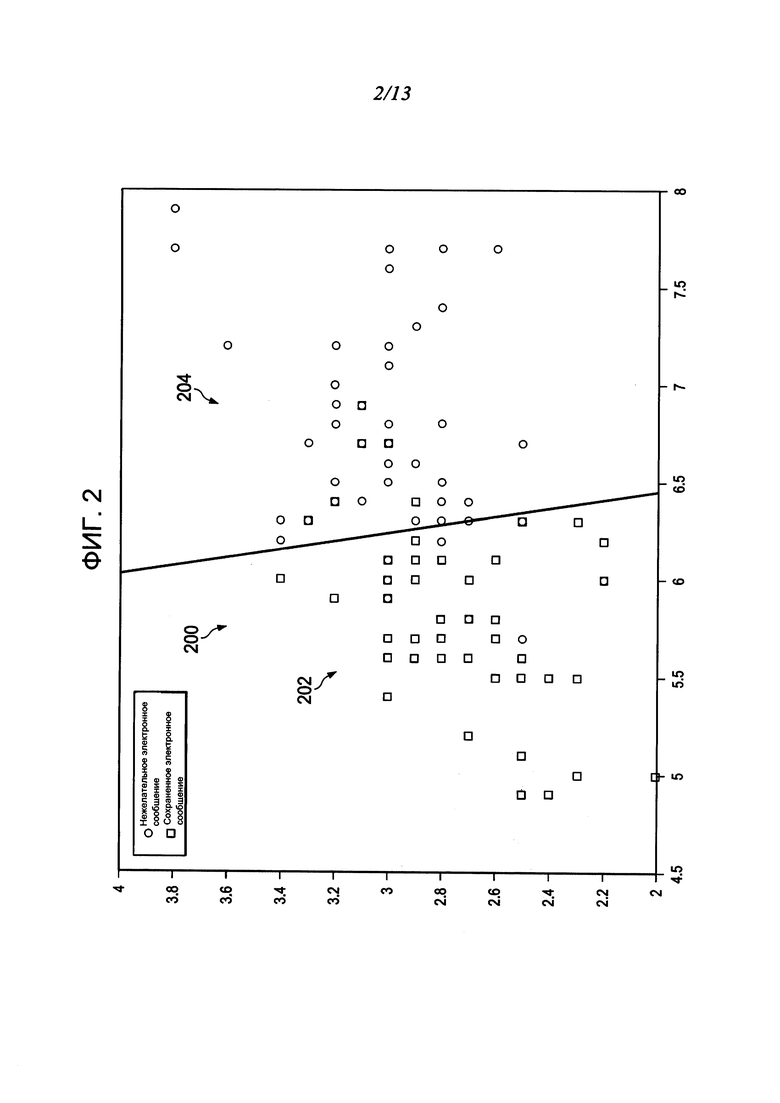
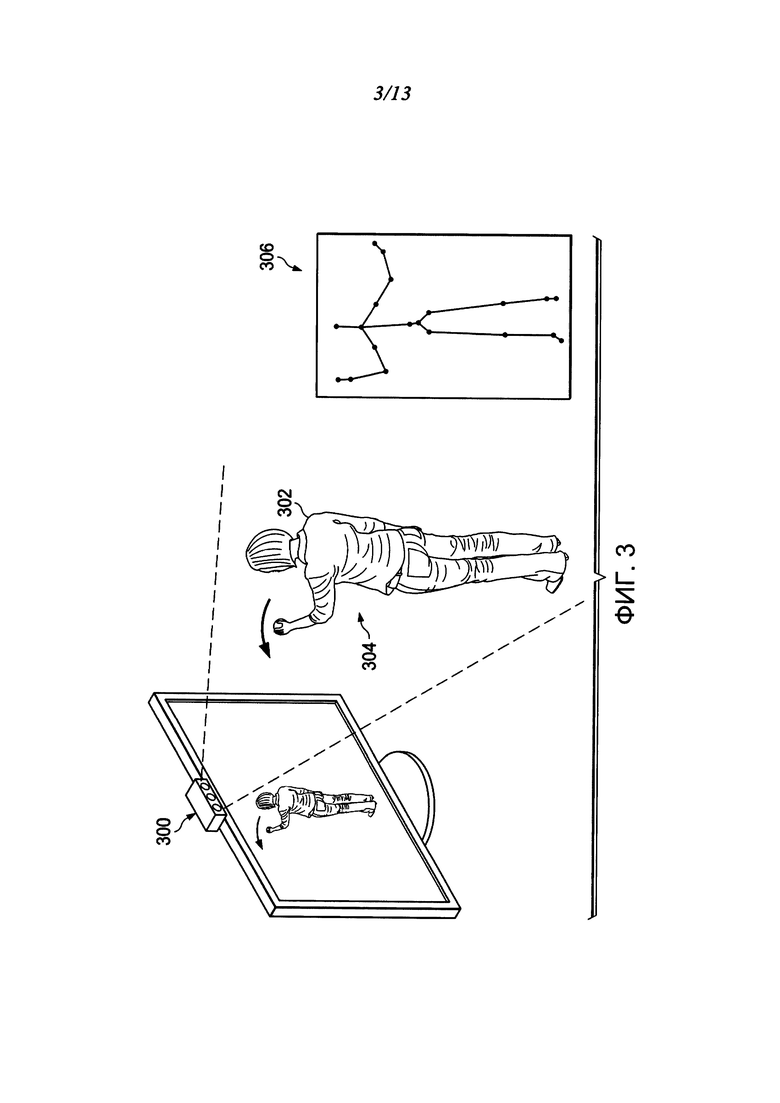
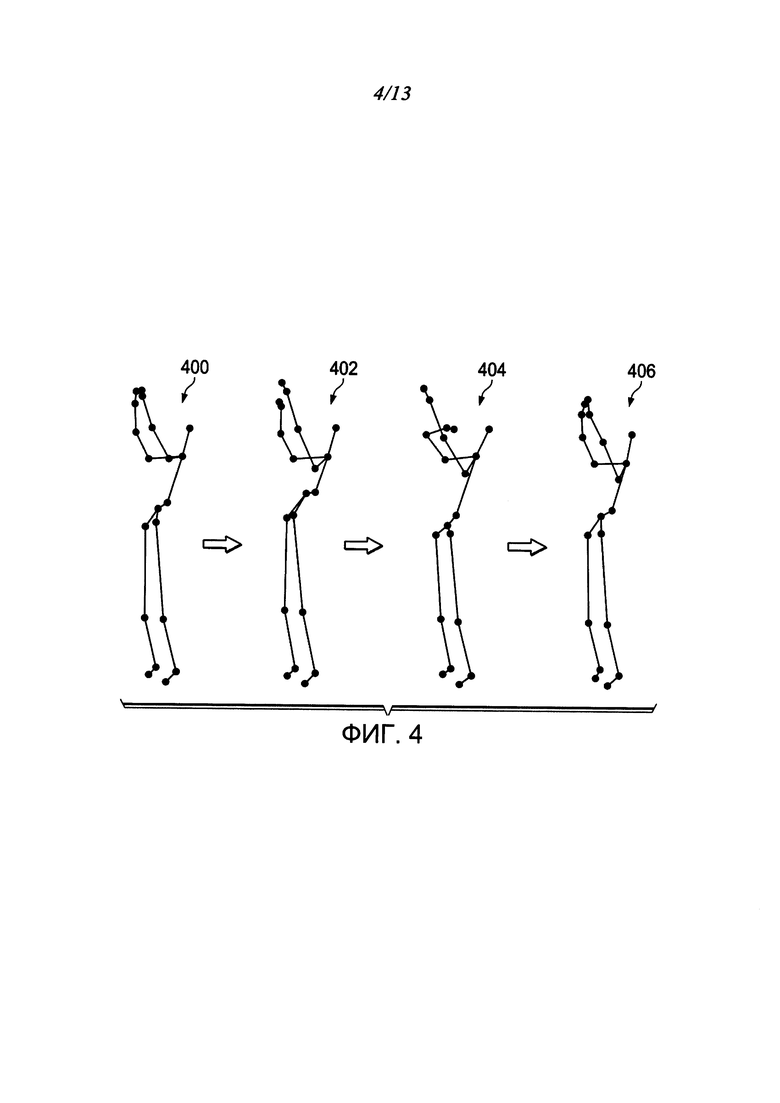
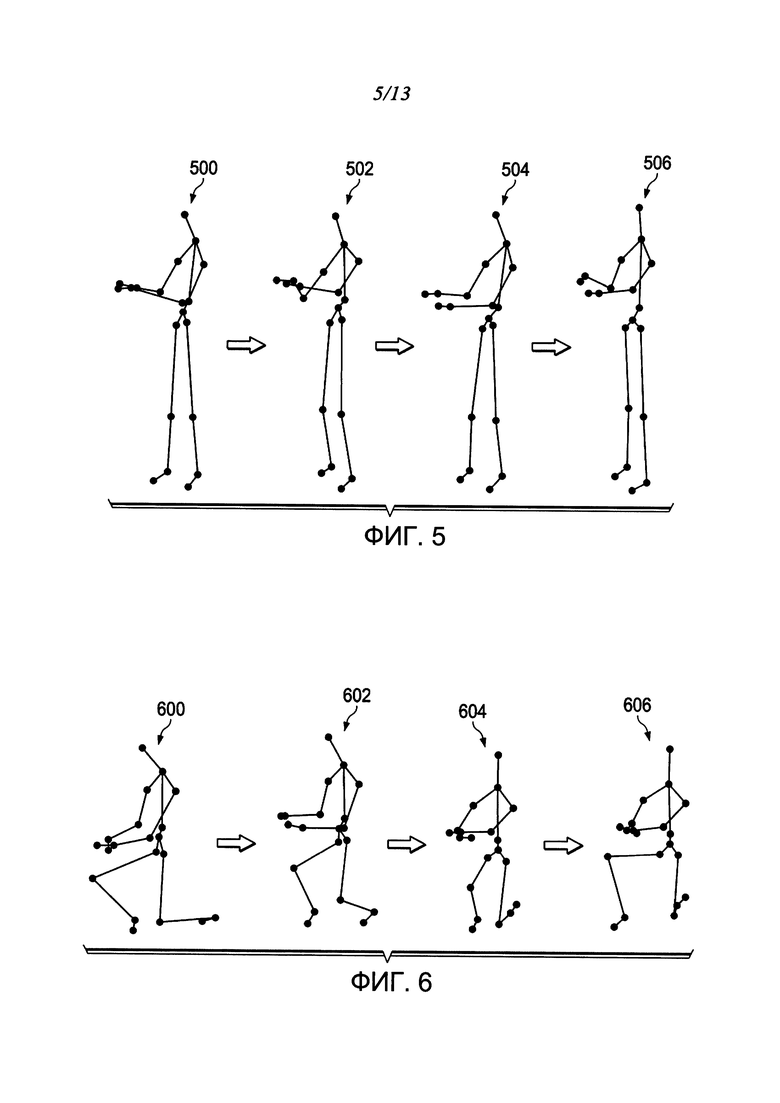
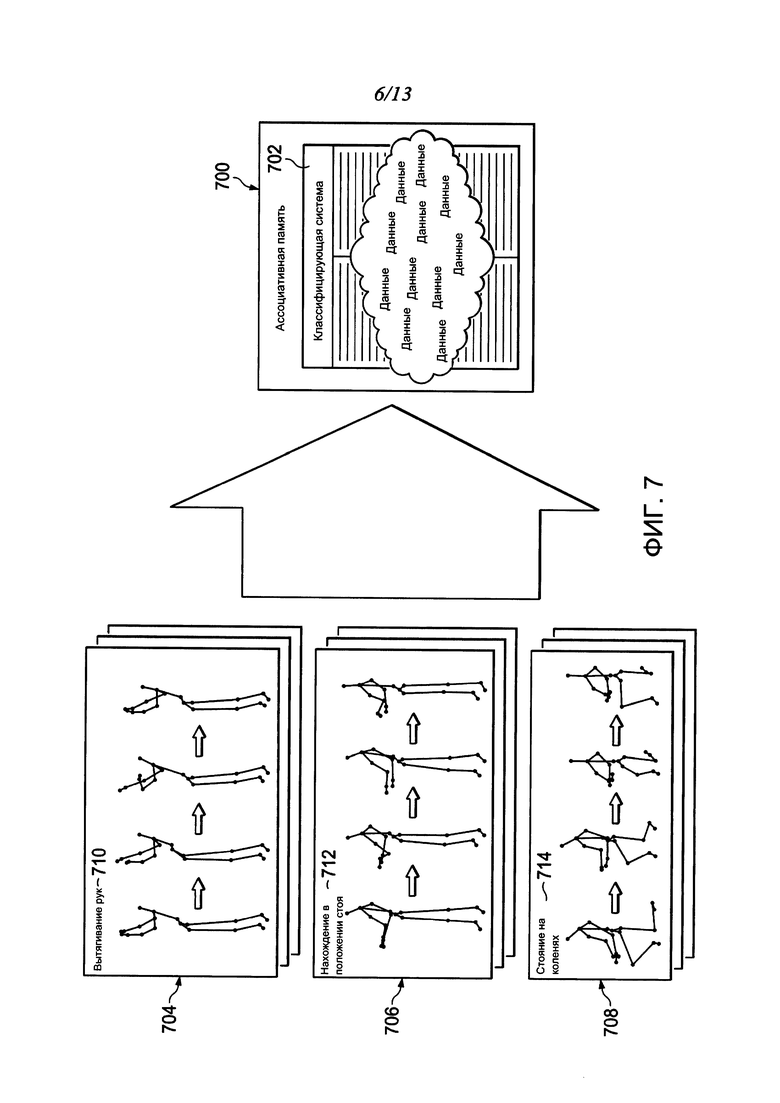

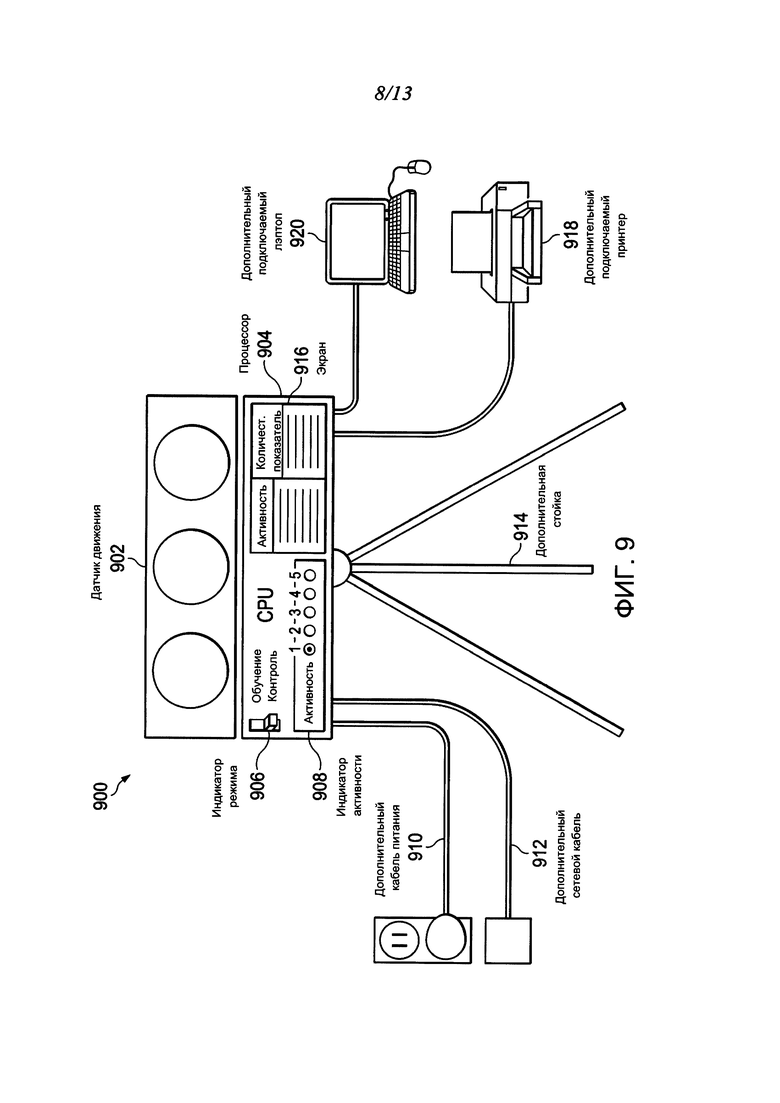
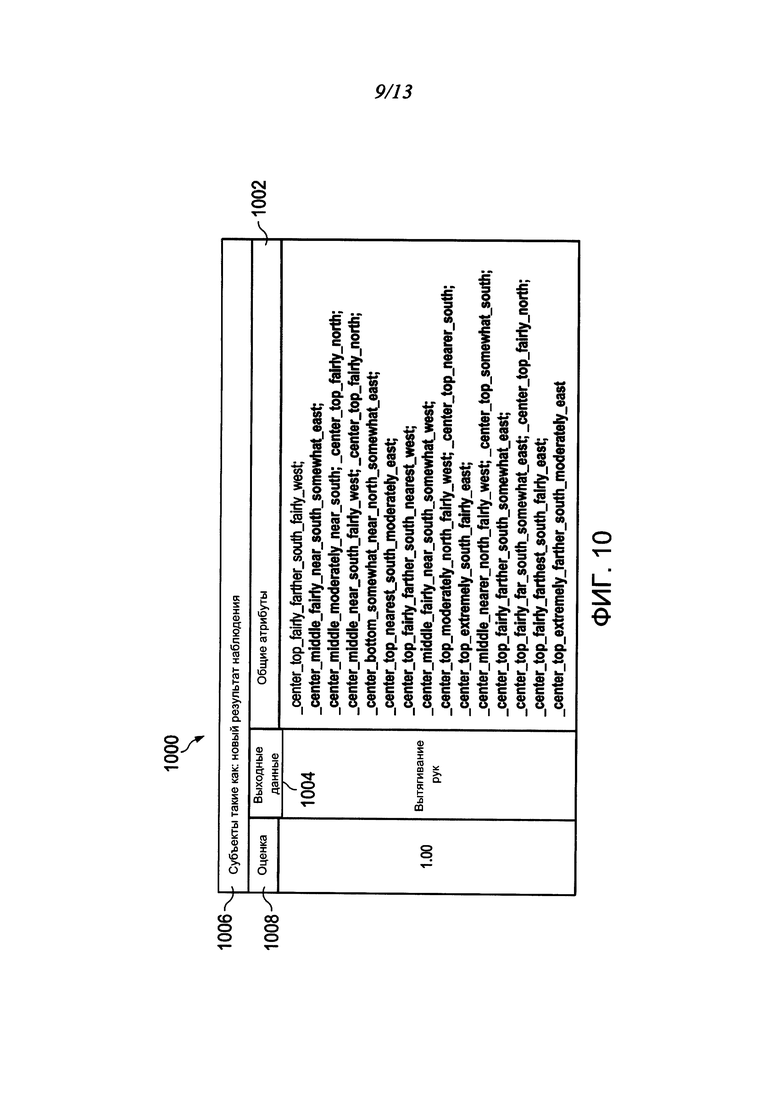
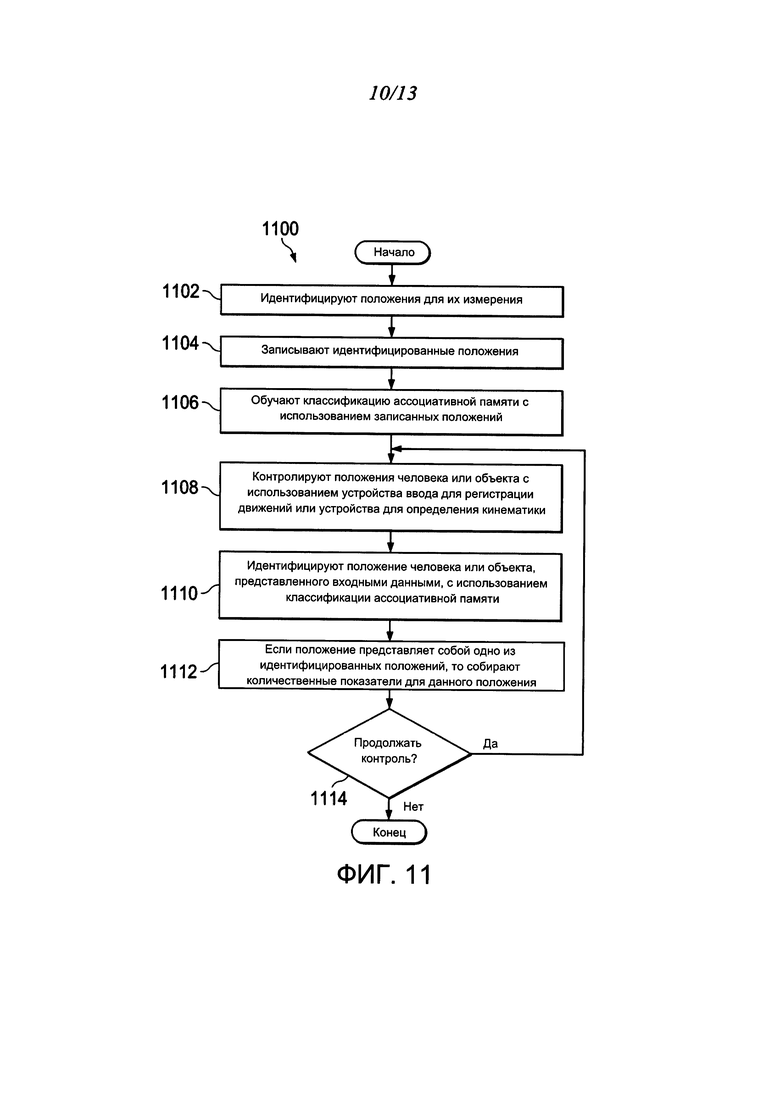
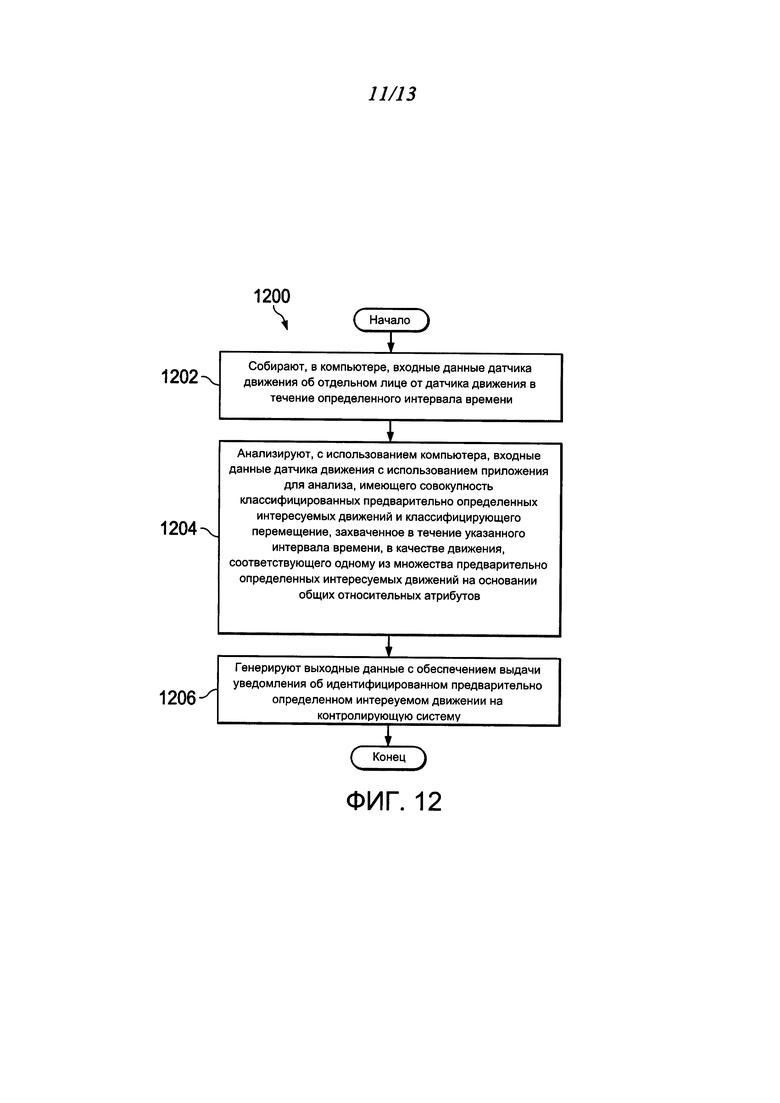
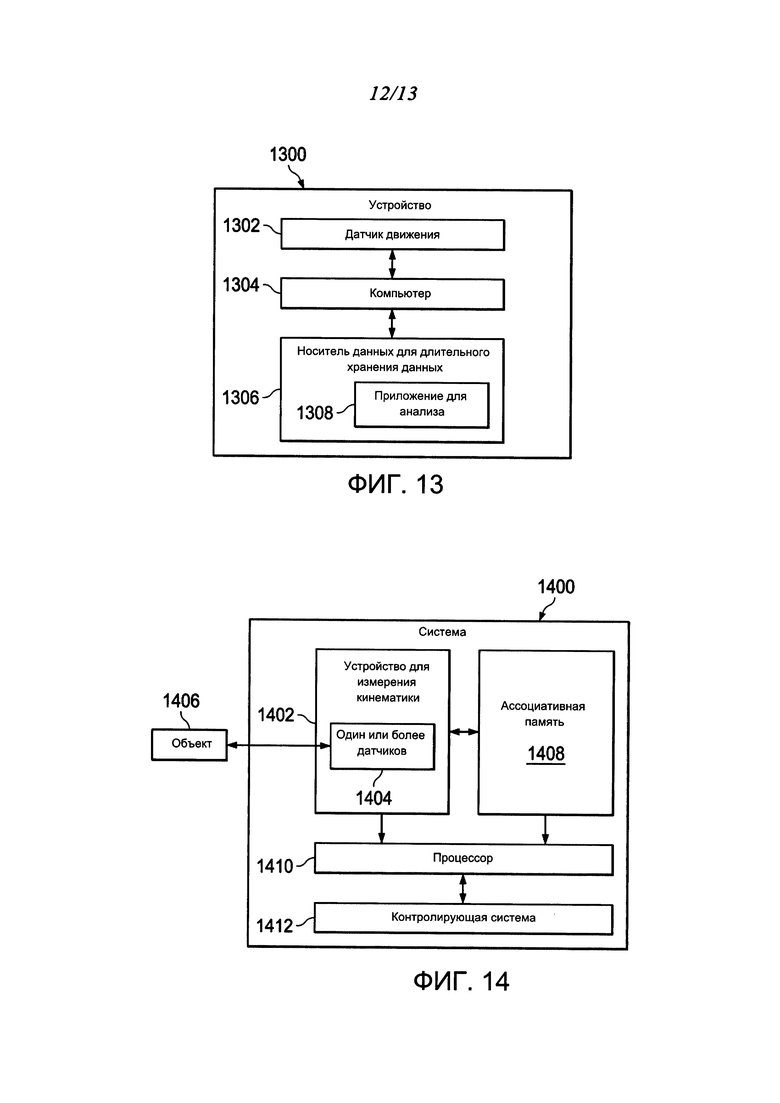
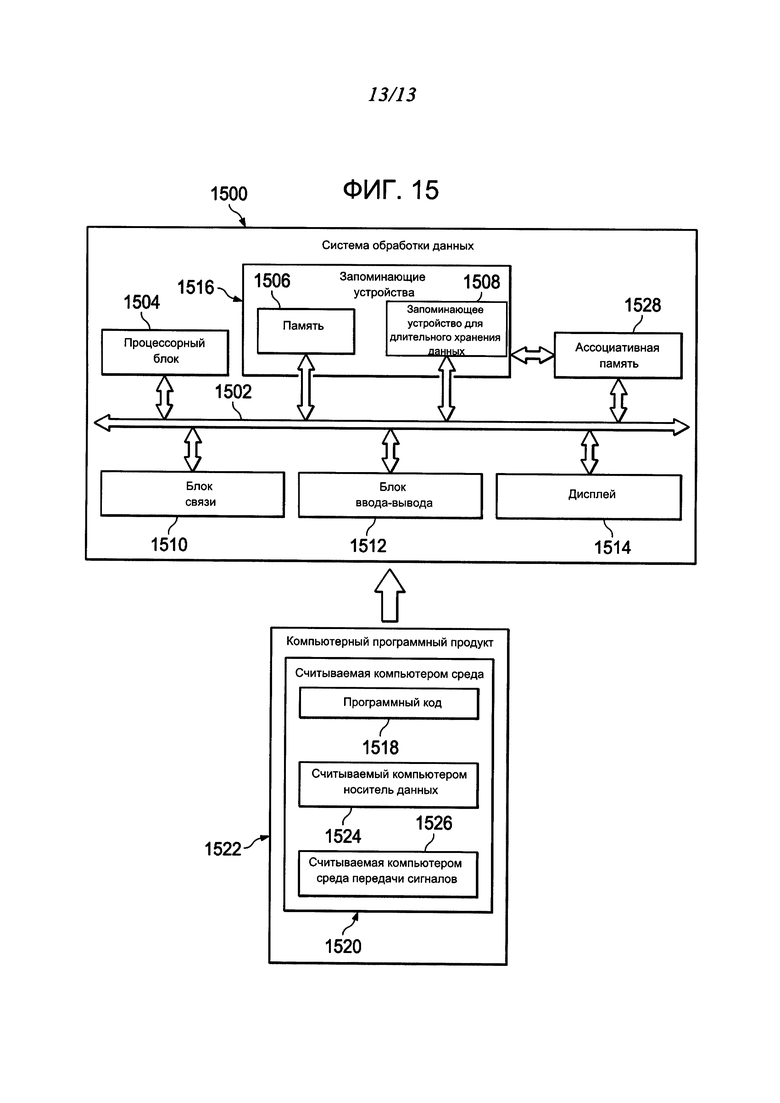
Изобретение относится к области идентификации движения отдельного человека. Технический результат заключается в обеспечении возможности определения, для каких движений человека или объекта должны быть получены количественные показатели. Способ включает сбор входных данных датчика движения о движениях отдельного лица в течение определенного интервала времени, анализ входных данных датчика движения с использованием приложения для анализа, имеющего совокупность классифицированных предварительно определенных интересуемых движений. Приложение для анализа классифицирует перемещение, захваченное во время интервала времени, в качестве движения, соответствующего одному из множества предварительно определенных интересуемых движений, на основании общих относительных атрибутов. Способ дополнительно включает генерирование выходных данных с обеспечением выдачи уведомления об идентифицированном предварительно определенном интересуемом движении на контролирующую систему. 3 н. и 17 з.п. ф-лы, 15 ил.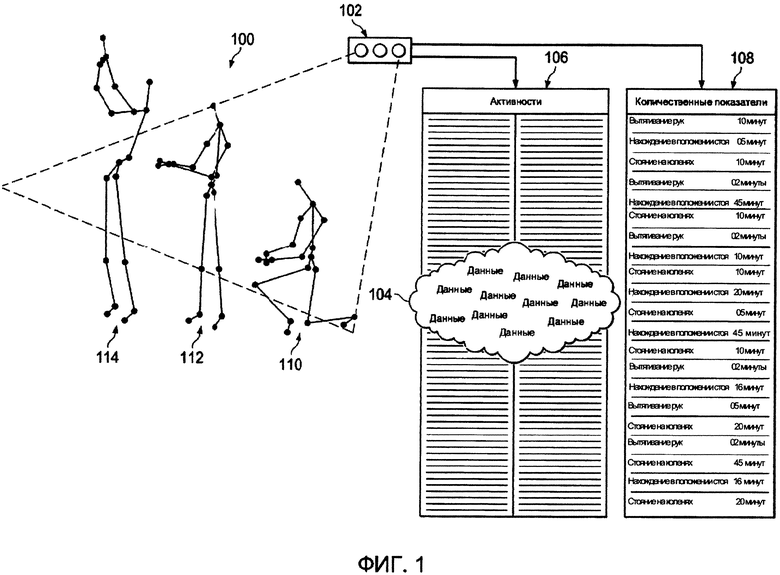
1. Способ (1200) контроля отдельного лица, устанавливающего оборудование, согласно которому:
используют датчик (1302) движения для контроля отдельного лица при установке им оборудования, что включает положение стоя на коленях, стоячее положение или положение вытягивания рук;
собирают в компьютере (1304) входные данные датчика движения о движениях указанного отдельного лица от датчика (1302) движения в течение определенного интервала времени для использования при определении качественных характеристик положений отдельного лица,
анализируют с использованием компьютера (1304) входные данные датчика движения для классифицирования и идентификации положения отдельного лица, такого как одно из по меньшей мере стоячего положения или положения стоя на коленях, с использованием классификации ассоциативной памяти и для классифицирования перемещения, захваченного в течение указанного интервала времени, в качестве движения, соответствующего одному из множества предварительно определенных интересуемых движений, на основании общих относительных атрибутов,
причем множество предварительно определенных движений включает по меньшей мере наклонное перемещение;
генерируют выходные данные с обеспечением выдачи уведомления об идентифицированном предварительно определенном интересуемом движении на контролирующую систему (1412), и
контролируют продолжительность сохранения отдельным лицом идентифицированного положения для сбора количественных показателей того, как долго отдельное лицо сохраняет потенциально опасное положение.
2. Способ (1200) по п. 1, согласно которому дополнительно:
генерируют выходной предупредительный сигнал, когда идентифицированное предварительно определенное интересуемое движение превышает предварительно определенное пороговое значение.
3. Способ (1200) по п. 1, согласно которому дополнительно:
собирают количественные показатели (108) об интересуемом движении в ответ на прием указанного уведомления.
4. Способ (1200) по п. 1, согласно которому дополнительно:
собирают количественные показатели (108) о дополнительных перемещениях отдельного лица в ответ на прием указанного уведомления.
5. Устройство (1300) для идентификации интересуемого движения отдельного лица, содержащее:
датчик (1302) движения для контроля отдельного лица при установке им оборудования, что включает положение стоя на коленях, стоячее положение или положение вытягивания рук,
компьютер (1304), связанный с датчиком (1302) движения и выполненный с возможностью сбора данных датчика движения о движениях отдельного лица от датчика (1302) движения в течение определенного интервала времени для использования при определении множества качественных характеристик положений отдельного лица, и
считываемый компьютером носитель (1306) данных для длительного хранения данных, хранящий приложение (1308) для анализа, выполненное таким образом, что, после его исполнения компьютером, оно анализирует данные датчика движения для классифицирования и идентификации положения отдельного лица, такого как одно из по меньшей мере стоячего положения или положения стоя на коленях, с использованием классификации ассоциативной памяти и для классифицирования перемещения отдельного лица, захваченного в течение указанного интервала времени, в качестве движения, соответствующего одному из множества предварительно определенных интересуемых движений, на основании общих относительных атрибутов,
причем множество предварительно определенных движений включает по меньшей мере наклонное перемещение;
а приложение (1308) для анализа дополнительно выполнено с возможностью, после его исполнения, генерировать выходные данные с обеспечением выдачи уведомления об идентифицированном предварительно определенном интересуемом движении в контролирующую систему (1412) и контролировать продолжительность сохранения отдельным лицом идентифицированного положения для сбора количественных показателей того, как долго отдельное лицо сохраняет потенциально опасное положение.
6. Устройство (1300) по п. 5, в котором компьютер (1304) дополнительно выполнен с возможностью создания выходного предупредительного сигнала, когда идентифицированное предварительно определенное интересуемое движение превышает предварительно определенное пороговое значение.
7. Устройство (1300) по п. 5, в котором компьютер (1304) дополнительно выполнен с возможностью сбора количественных показателей (108) об интересуемом движении в ответ на прием указанного уведомления.
8. Устройство (1300) по п. 5, в котором компьютер (1304) дополнительно выполнен с возможностью сбора количественных показателей (108) о дополнительных перемещениях отдельного лица в ответ на прием указанного уведомления.
9. Система определения кинематики, содержащая:
устройство для измерения кинематики, имеющее по меньшей мере один датчик, выполненный с возможностью обнаружения множества физических положений части объекта;
ассоциативную память (1408), связанную с устройством для измерения кинематики и содержащую множество данных и множество ассоциаций среди указанного множества данных,
причем указанное множество данных собрано в ассоциированные группы, а
ассоциативная память (1408) выполнена с возможностью выдачи на нее запроса на основании по меньшей мере непрямых взаимосвязей среди указанного множества данных,
при этом система также содержит процессор (1410), связанный с ассоциативной памятью и устройством для измерения кинематики и выполненный с возможностью:
использования датчика (1302) движения для контроля отдельного лица при установке им оборудования, что включает положение стоя на коленях, стоячее положение или положение вытягивания рук;
сбора входных данных датчика движения о движениях указанного отдельного лица от датчика (1302) движения в течение определенного интервала времени для использования при определении качественных характеристик положений отдельного лица,
анализирования входных данных датчика движения для классифицирования и идентификации положения отдельного лица, такого как одно из по меньшей мере стоячего положения или положения стоя на коленях, с использованием классификации ассоциативной памяти и для классифицирования перемещения, захваченного в течение указанного интервала времени, в качестве движения, соответствующего одному из множества предварительно определенных интересуемых движений, на основании общих относительных атрибутов,
причем множество предварительно определенных движений включает по меньшей мере наклонное перемещение;
а также с возможностью генерирования выходных данных с обеспечением выдачи уведомления об идентифицированном предварительно определенном интересуемом движении на контролирующую систему (1412), и
контролирования продолжительности сохранения отдельным лицом идентифицированного положения для сбора количественных показателей того, как долго отдельное лицо сохраняет потенциально опасное положение.
10. Система по п. 9, в которой процессор также выполнен с возможностью побуждения контролирующей системы для измерения дополнительных движений объекта, когда определенное движение совпадает с одним из субсовокупности из множества предварительно определенных движений.
11. Система по п. 10, в которой процессор в совокупности с ассоциативной памятью выполнен с возможностью выдачи оценки дополнительных движений объекта.
12. Система по п. 11, в которой оценка основана на критерии, выбранном пользователем.
13. Система по п. 10, в которой объектом является человек.
14. Система по п. 13, в которой указанная субсовокупность содержит по меньшей мере одно нежелательное положение тела человека.
15. Система по п. 14, в которой дополнительные движения содержат все движения человека в течение определенного интервала времени.
16. Система по п. 14, в которой дополнительные движения содержат только те движения, которые находятся в пределах указанной субсовокупности в течение определенного интервала времени.
17. Система по п. 14, в которой обеспечено контролирование отдельной части тела человека.
18. Система по п. 14, в которой процессор также выполнен с возможностью выдачи уведомления на контролирующую систему, когда движения человека больше не находятся в пределах указанной субсовокупности.
19. Система по п. 18, в которой процессор также выполнен с возможностью выдачи команды на контролирующую систему для прекращения контроля человека, когда эти движения этого человека находятся за пределами указанной субсовокупности.
20. Система по п. 9, в которой ассоциативная память выполнена с возможностью ее обучения с тем, чтобы содержать дополнительное предварительно определенное движение во множестве предварительно определенных движений и содержать дополнительное движение в субсовокупности из этого множества предварительно определенных движений.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| РАСПОЗНАВАНИЕ ЖЕСТОВ В ДИНАМИКЕ ДЛЯ ПОСЛЕДОВАТЕЛЬНОСТИ СТЕРЕОКАДРОВ | 2001 |
|
RU2280894C2 |

