Область применения
Предлагаемый способ относится к автоматизированным системам управления территориально-распределенными производственными объектами, работающими в тяжелых климатических условиях, и может быть использована для построения систем управления объектами наземной инфраструктуры ракетно-космических комплексов, а также химических и нефтегазовых установок.
Уровень техники
Известен способ функционирование систем управления территориально-распределенными объектами, когда весь алгоритм управления реализуется в одном (центральном) узле (промышленная ЭВМ, ПЛК), а периферийные ПЛК выполняют только рутинные операции по сбору данных и низкоуровневому управлению исполнительными механизмами, Например, система мониторинга и управления инженерным оборудованием объекта (Патент РФ № 2133490), содержащая центральный вычислительный модуль с устройством ввода-вывода, с которым по каналам информационной сети связаны датчики контроля, измерения, и управления и устройства управления узлами и агрегатами инженерного оборудования. Реализация чисто централизованного управления требует значительной производительности и большой памяти центрального управляющего узла (ЭВМ, ПЛК), большой объем передаваемых данных, недостаточная надежность.
1) Известна интеллектуальная сетевая система (Патент США «Intelligent grid system» US 7499762 B2), содержащая центральный блок управления, сеть распределения ресурсов (коммуникационная среда), интеллектуальные устройства обработки данных и локального управления, расположенные в узлах сети распределения ресурсов. Чисто распределенное управление снижает объем передаваемых в системе данных, т.к. контроллеры работают в значительной степени автономно, а обмен информацией между сокращен, однако используемая традиционная реализация сетевого взаимодействия ПЛК (протоколы Ethernet, TCP/IP) приводит к возрастанию требований к их производительности и увеличению требований к физическим характеристикам каналов связи, затрудняющие передачу данных на большие расстояния, значительно усложняется синхронизация работы отдельных узлов.
Технический результат
Техническим результатом предлагаемого способа является снижение требований к производительности и памяти используемых в ПЛК микропроцессоров, снижение объема передаваемой между ПЛК информации и требования к пропускной способности каналов связи, повышение надежности и возможности масштабирования АСУ.
Технический результат достигается за счет распределении функций единого общего алгоритма управления между периферийными ПЛК и центральный ПЛК, распределенной организации памяти данные о текущих значениях датчиков и исполнительных механизмов, организации синхронизации работы периферийных ПЛК и обмена данными между ними под управлением центрального ПЛК по многофазному циклическому алгоритму управления, и актуализации данных в памяти периферийных ПЛК центральным ПЛК с помощью специальных таблиц, преобразующих виртуальные адреса памяти состояний датчиков и исполнительных механизмов всей системы в физические адреса памяти периферийных ПЛК и адреса протокола, который реализует доступ к этой памяти.
Краткое описание чертежей
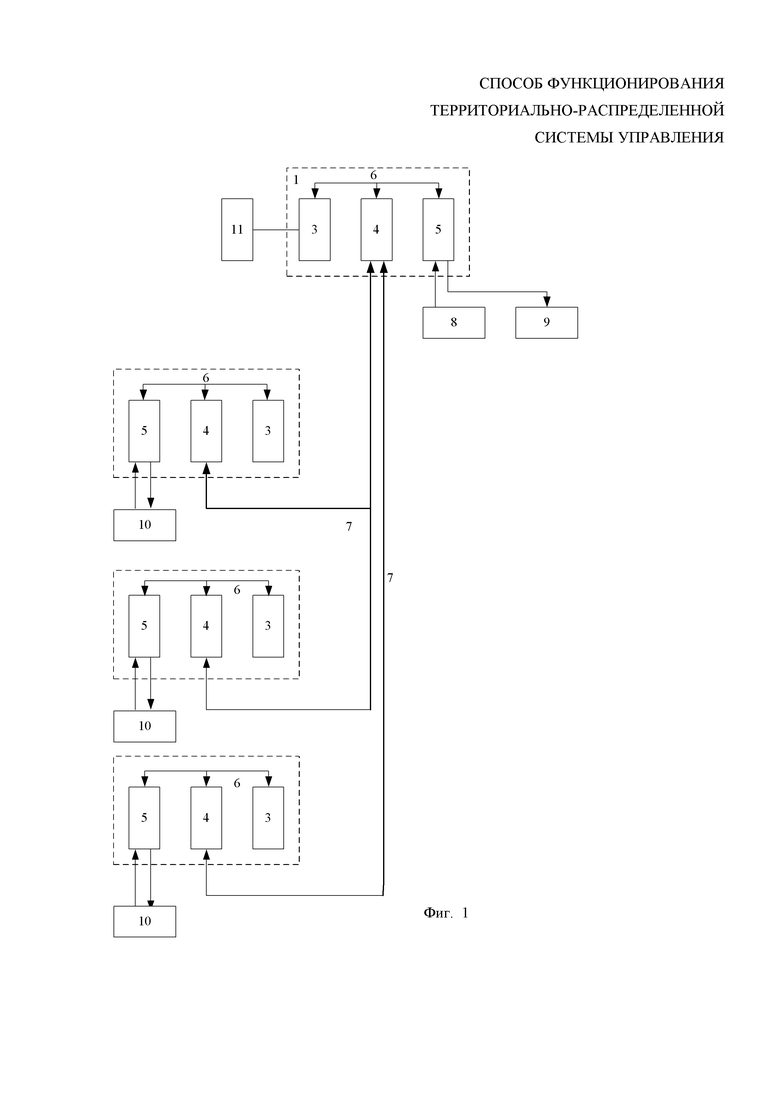
На фигуре 1 приведена возможная структурная схема системы, реализующей заявляемый способ, где 1 – центральный ПЛК, периферийный ПЛК, 3 - модуль центрального процессора, 4 – связной модуль, 5- модули ввода-вывода, 6 – внутренняя шина ПЛК, 7 – каналы связи, 8 –пульт управления, 9 - устройство отображения, 10 – датчика и исполнительные механизмы, 11 – внешняя память (регистратор).
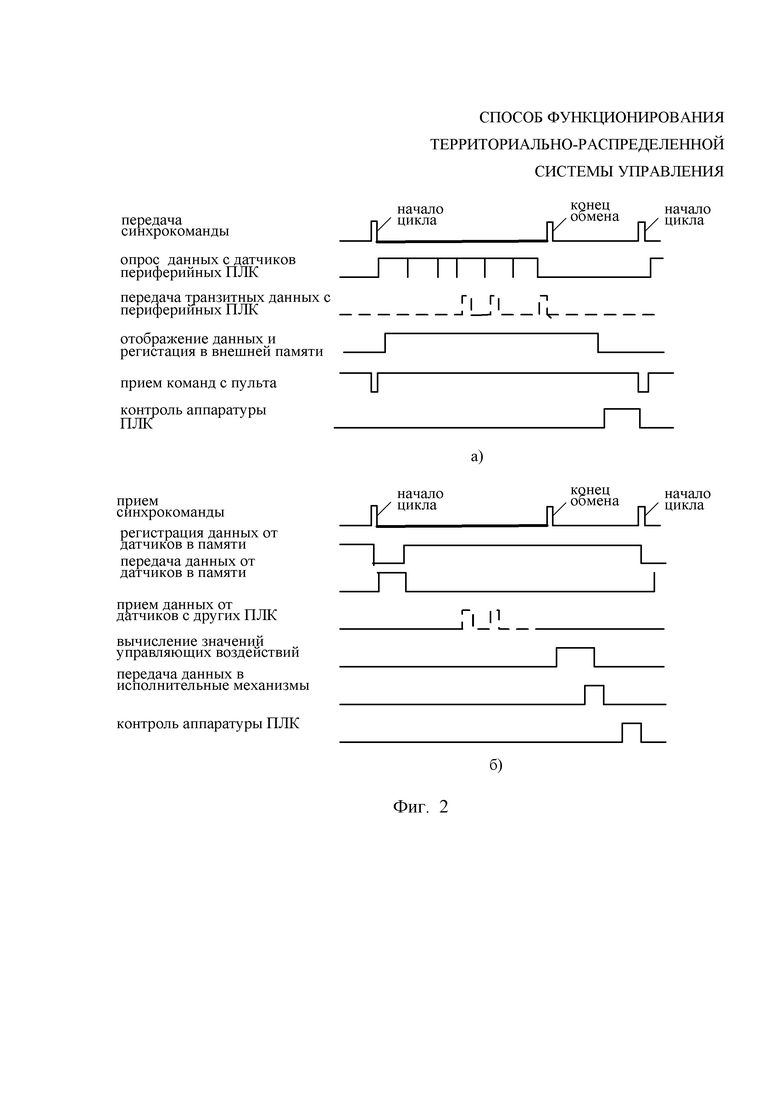
На фигуре 2 представлены циклограммы работы: а - центрального ПЛК, б- периферийного ПЛК.
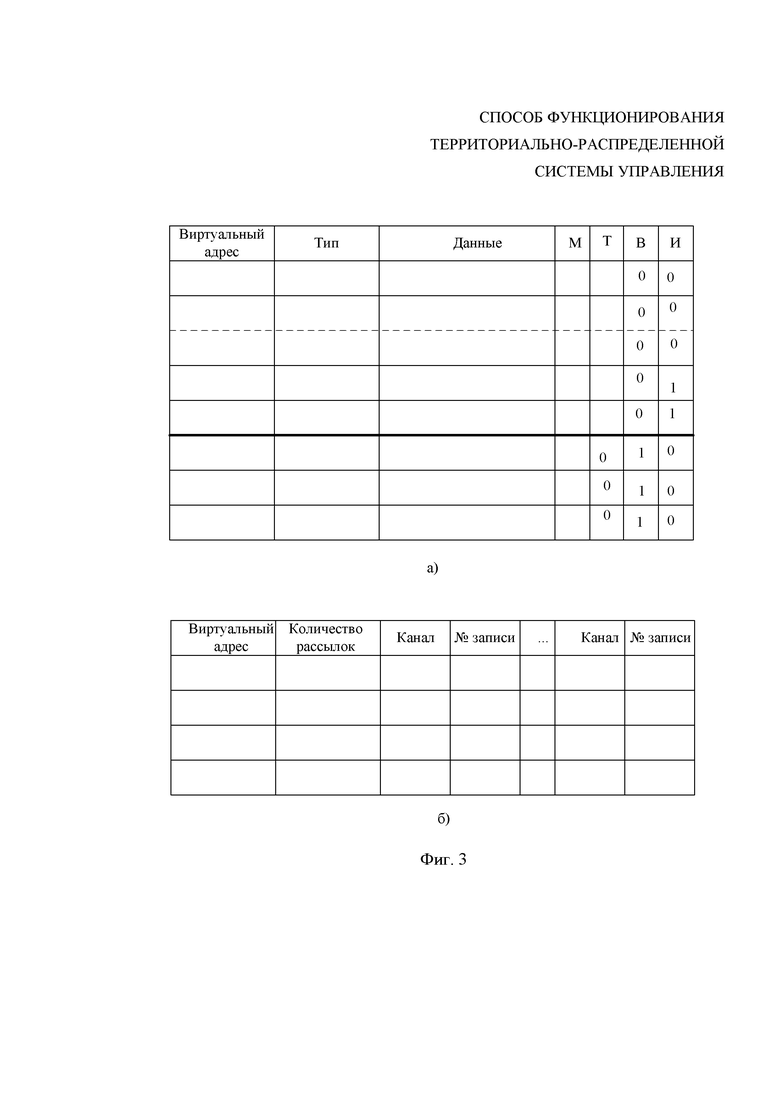
На фигуре 3 показаны а – организация памяти данные о текущих значениях датчиков и исполнительных механизмов в памяти периферийных ПЛК, б- организация таблицы преобразования виртуальных адресов памяти состояний датчиков и исполнительных механизмов в физические адреса памяти периферийных ПЛК.
Осуществление способа
Территориально-распределенная система управления включает несколько ПЛК, соединенными по схемам «Звезда» и/или «Общая шина» интерфейсами RS-485/422 (фиг. 1). Все ПЛК однотипны, имеют магистрально-модульную организацию и содержат модули центрального процессора, один или несколько связных модулей и модули модули вывода –вывода, состав и количество которых определяется подключенными в ПЛК датчиками, механизмами и другими устройствами (таким ПЛК может быть представленный полезной моделью «Программируемый логический контроллер для территориально-распределенной системы управления» № RU 171 436).
За ПЛК закреплены следующие функции:
- один ПЛК, называемый в дальнейшем центральным, обслуживает пульт управления оператора, ведет журнал процесса управления, синхронизирует работу остальных ПЛК, а так же распределяет текущую информацию о состоянии датчиков между ними.
- остальные ПЛК, называемые в дальнейшем, периферийными, ведут сбор и обработку аналоговых и дискретных сигналов с подключенных датчиков, а так же реализуют часть общего алгоритма управления, вырабатывая управляющие воздействия в исполнительные механизмы, непосредственно подключенные к данному ПЛК.
Каждый периферийный ПЛК хранит в своей памяти данные о текущих значениях только тех датчиков и исполнительных механизмов, которые непосредственно связаны с реализуемой им частью алгоритма управления. Данные от подключенных к нему датчиков каждый ПЛК формирует самостоятельно, а данные о состоянии датчиков, подключенных к другим ПЛК, доставляются центральным ПЛК по каналам связи.
Текущее значение сигнала каждого датчика и сигнала, переданного в исполнительный механизм, сохраняется в памяти ПЛК в виде записи, формат которой показан на фиг. 3а. и включает виртуальный адрес - номер источника данного сигнала в системе, тип (дискретный, аналоговый разрядность и т.д), значение и флажки: М –признак модификации (изменения) значения, Т – запись относится датчику, значения сигнала с которого используются другими ПЛК, В - запись относится к датчику, подключенному к другому ПЛК, И – запись относится к исполнительному механизму.
Обмен данными между ПЛК с помощью связных модулей выполняется по принципу «ведущий-ведомый», роль ведущего выполняет центральный ПЛК. Предпочтительным коммуникационным протокол может быть Modbus RTU. Каждая запись памяти периферийного ПЛК адресуется коммуникационным протоколом как отдельный регистр.
Система реализует циклический алгоритм управления. Каждый цикл разбит на ряд фаз, инициируемых центральным ПЛК:
- опрос периферийных ПЛК об изменении состояний подключенных к ним датчиков,
- обновление информации в устройстве отображения и пульте,
- рассылка транзитных данных между периферийными ПЛК,
- формирование управляющий воздействий в периферийных ПЛК,
- сбор данных с датчиков в периферийных ПЛК.
В различных ПЛК фазы перекрываются.
Актуализация данных в памяти периферийных ПЛК выполняется центральным ПЛК с помощью специальных таблиц и указателей, преобразующих виртуальные адреса памяти состояний датчиков всей системы в физические адреса памяти периферийных ПЛК и адреса протокола, который реализует доступ к этой памяти.
Цикл работы системы задает центральный ПЛК от собственных часов, формируя широковещательную команду «Начало цикла», рассылаемую во все ПЛК.
Периферийные ПЛК, получив команду «Начало цикла»:
- временно прекращают регистрацию в своей оперативной памяти данных от подключенных к нему датчиков, хотя модули ввода-вывода продолжают отслеживать их текущие значения;
- формируют битовую таблицу изменений состояния датчиков, каждый бит которой соответствует одной записи в памяти и его значение равно флажку М;
- по запросу таблица изменений состояния передается в центральный ПЛК, который затем считывает записи, отражающие изменения состояния соответствующих датчиков.
- после чтения записей их флажки М сбрасываются, и разрешается обновление записей а случае изменения состояния контролируемых данным ПЛК датчиков;
- принимает и размещает в памяти записи об измененном состоянии датчиков с других ПЛК, пересылаемых центральным ПЛК.
Периферийные ПЛК, получив команду «Конец обмена»:
- выполняют вычисление значений управляющих воздействий, используя данные из собственной памяти, корректируя записи, соответствующие исполнительным механизмам;
- передают значения управляющий воздействий в исполнительные механизмы;
- контролирует работоспособность аппаратуры ПЛК.
Центральный ПЛК, передав команду «Начало цикла»:
- последовательно опрашивает периферийные ПЛК, считывая и анализируя битовую таблицу изменений состояния датчиков каждого, и в случае наличия, считывает записи, отражающие изменения состояния соответствующих датчиков;
- анализирует флажки Т считанных записей, в случае их установки, рассылает запись соответствующего датчика в память других ПЛК, использующих состояния этого датчика для выработки управляющих воздействий, при этом для определения канала связи и адреса регистра назначения используется таблица, показанная на фиг. 3б;
- одновременно принятые данные используются для отображения и регистрируются во внешней памяти, где ведет журнал процесса управления, а также принимаются и исполняются команды пульта, если они поступают;
- контролирует работоспособность аппаратуры ПЛК и каналов связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ противодействия аномалиям в технологической системе | 2019 |
|
RU2747461C2 |
| Система и способ выявления аномалий в технологической системе | 2019 |
|
RU2750629C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОТЕЛЬНОЙ | 2017 |
|
RU2656670C1 |
| Сервер локального участка периметра интегрированного комплекса безопасности | 2020 |
|
RU2743908C1 |
| Способ передачи данных по шине, система связи для осуществления данного способа и устройство автоматической защиты для предотвращения аварийной ситуации на объекте управления | 2018 |
|
RU2705421C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА МОНИТОРИНГА, ОПОВЕЩЕНИЯ И УПРАВЛЕНИЯ МУНИЦИПАЛЬНОГО И/ИЛИ ОБЪЕКТОВОГО УРОВНЯ ПРИ УГРОЗЕ, ВОЗНИКНОВЕНИИ, В ХОДЕ И ПРИ ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2015 |
|
RU2605505C1 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| ДВУХКОНТУРНЫЙ ГАЗОВЫЙ ЛАЗЕР И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2016 |
|
RU2621616C1 |
| КОМПЛЕКС ВЫЧИСЛИТЕЛЬНЫЙ УПРАВЛЯЮЩИЙ С МЕЖМОДУЛЬНОЙ ШИНОЙ FBUS | 2024 |
|
RU2840079C1 |
| СПОСОБ РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2281240C2 |
Изобретение относится к автоматизированным системам управления. Способ функционирования территориально-распределенной системы управления, состоящей из однотипных программируемых логических контроллеров, объединенных последовательными каналами связи, включает операции опроса датчиков и формирование управляющих воздействий в исполнительные механизмы, прием команд и отображение состояния объекта управления. Операции общего алгоритма управления распределены между центральным и периферийным контроллером. Каждый периферийный контроллер хранит в своей памяти данные о текущих значениях только тех датчиков и исполнительных механизмов, которые связаны с реализуемой им частью алгоритма. Данные в памяти о состоянии подключенного оборудования каждый периферийный контроллер формирует самостоятельно. Повышается надежность системы управления. 2 з.п. ф-лы, 3 ил.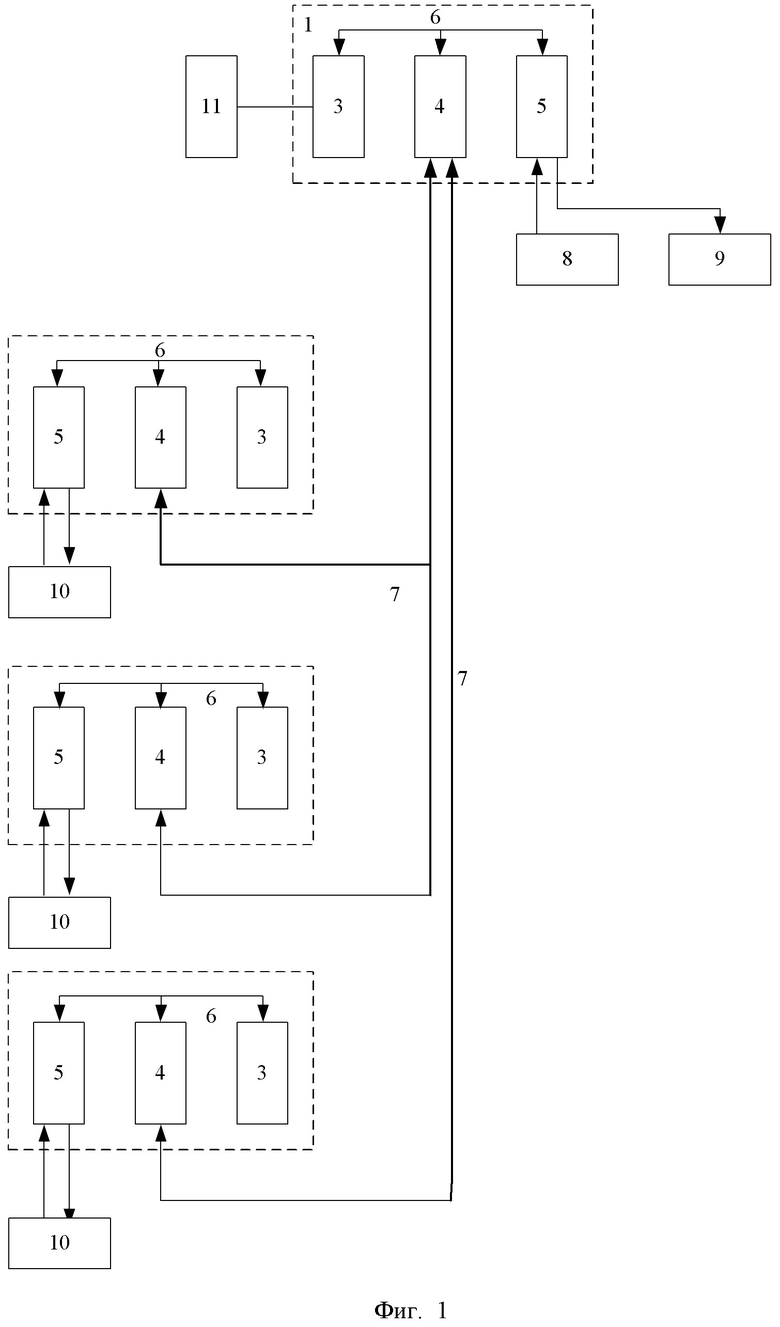
1. Способ функционирования территориально-распределенной системы управления, реализующей циклический алгоритм управления, состоящей из нескольких однотипных программируемых логических контроллеров (ПЛК), объединенных последовательными каналами связи, включающий операции опроса датчиков и формирование управляющих воздействий в исполнительные механизмы, а также прием команд и отображение состояния объекта управления, причем операции единого общего алгоритма управления распределены между центральным ПЛК, который обслуживает пульт управления оператора, ведет журнал процесса управления, синхронизирует работу остальных ПЛК, а также распределяет между ПЛК текущую информацию о состоянии датчиков, и периферийными ПЛК, которые ведут сбор и обработку аналоговых и дискретных сигналов с подключенных к ним датчиков, а также выполняют операции общего алгоритма управления, связанные с выработкой значений управляющих воздействий, и передачу их в исполнительные механизмы, непосредственно подключенные к данному ПЛК, обмен данными между ПЛК по каналам связи выполняется по принципу «ведущий-ведомый», роль ведущего выполняет центральный ПЛК, отличающийся тем, что каждый периферийный ПЛК хранит в своей памяти данные о текущих значениях только тех датчиков и исполнительных механизмов, которые непосредственно связаны с реализуемой им частью алгоритма, причем данные в памяти о состоянии подключенного к нему оборудования каждый периферийный ПЛК формирует самостоятельно, а данные, необходимые для реализации алгоритма управления, но формируемые подключенными к другим ПЛК датчиками, доставляются центральным ПЛК по каналам связи.
2. Способ по п. 1, отличающийся тем, что в реализуемом системой циклическом алгоритме управления каждый цикл разбит на ряд фаз, инициируемых центральным ПЛК: опрос периферийных ПЛК об изменении состояний подключенных к ним датчиков, обновление информации пульта, рассылка транзитных данных между периферийными ПЛК, формирование управляющих воздействий в периферийных ПЛК, сбор данных с датчиков в периферийных ПЛК, при этом в различных ПЛК фазы перекрываются.
3. Способ по п. 1, отличающийся тем, что актуализация данных в памяти периферийных ПЛК выполняется центральным ПЛК с помощью специальных таблиц, преобразующих виртуальные адреса памяти состояний датчиков всей системы в физические адреса памяти периферийных ПЛК и адреса протокола, который реализует доступ к этой памяти.
| US 2014265983 A1, 18.09.2014 | |||
| US 2013282150 A1, 24.10.2013 | |||
| US 2016076664 A1, 17.03.2016 | |||
| КОМПОЗИЦИЯ ИНГРЕДИЕНТОВ ДЛЯ ПРИГОТОВЛЕНИЯ КОНЦЕНТРАТА СБИТНЯ (ВАРИАНТЫ) | 2002 |
|
RU2211244C1 |
| СПОСОБ ПОДАВЛЕНИЯ ИМПУЛЬСОВ ОБРАТНОЙ | 0 |
|
SU171436A1 |

