Настоящее изобретение относится к транспортировочному устройству и соответствующим способам сбора и транспортировки съемных контейнеров для текучей среды для транспортных средств и двигателей.
Для обеспечения работы двигателей многих транспортных средств используется одна или более текучих сред. Эти текучие среды часто представляют собой жидкости. Например, в двигателях внутреннего сгорания используются жидкие смазочные материалы на масляной основе. Кроме того, в электрических двигателях используются жидкие теплоносители, например для охлаждения, нагрева или для охлаждения и нагрева двигателя в разных условиях эксплуатации. Такие текучие среды обычно содержатся в резервуарах, связанных с двигателем, и может требоваться их периодическая замена.
Традиционная периодическая замена композиции смазочного масла двигателя на транспортном средстве обычно включает операцию спуска масла из картера двигателя. При этом также может осуществляться замена масляного фильтра двигателя. Для выполнения вышеуказанных операций обычно необходим доступ из-под двигателя к пробке сливного отверстия картера двигателя и к масляному фильтру, причем могут потребоваться инструменты и подходящая емкость для спускаемой композиции смазочного масла. Предпринимались попытки по обеспечению системы быстрой смены масляного фильтра и резервуара для двигателя внутреннего сгорания.
Также существуют и другие закрытые системы циркуляции текучих сред. В частности гидравлические системы и теплообменные установки, такие как рефрижераторы и тепловые насосы, являются примерами систем циркуляции текучих сред, в которых качество текучей среды может со временем ухудшаться. Для таких систем также предпринимались попытки по обеспечению быстрой смены резервуаров для текучей среды, что дает возможность регенерации текучей среды без необходимости проведения дорогого технического обслуживания.
После замены использованной текучей среды свежей текучей средой может быть необходимо регенерировать использованную текучую среду. Однако исторически сложилось так, что регенерация таких текучих сред связана с рядом проблем.
Варианты осуществления изобретения могут быть полезными при регенерации таких текучих сред, поскольку они обеспечивают возможность сбора текучих сред у потребителей и распределения этих сред между потребителями, и при этом обеспечивается высокая степень надежности и отслеживаемости.
Аспекты и варианты осуществления изобретения указаны в прилагаемой формуле изобретения.
Ниже будут описаны некоторые варианты осуществления изобретения, которые являются лишь примерами его реализации, со ссылками на прилагаемые чертежи, на которых показано:
на фиг. 1 - схематический вид в плане поддона для транспортировки контейнеров для текучей среды, а также вид частичного сечения поддона;
на фи. 2 - функциональная блок-схема транспортировочного устройства;
на фиг. 3 - вид системы управления транспортировкой;
на фиг. 4А - схематический вид фиксатора для использования в посадочном месте 500 поддона для контейнера, причем фиксатор на фиг. 4А представляет собой фиксирующий и/или направляющий механизм с приводом, находящимся в первом положении;
на фиг. 4Б - схематический вид фиксатора фиг. 4А с приводом во втором положении.
Для указания одинаковых элементов на чертежах используются одинаковые ссылочные номера.
Настоящее изобретение относится к сбору и транспортировке контейнеров для текучей среды для обеспечения возможности регенерации содержащейся в них текучей среды. Варианты осуществления изобретения обеспечивают эффективную и надежную идентификацию текучей среды, содержащейся в собранных контейнерах, так чтобы ее можно было регенерировать с использованием соответствующего способа. Варианты осуществления изобретения могут также уменьшить перекрестное загрязнение между разными, но внешне сходными текучими средами, которые лучше всего регенерировать по отдельности.
В одном из вариантов осуществления изобретения предлагается поддон, содержащий множество посадочных мест для контейнеров. Каждое из этих мест приспособлено для установки (несения) контейнера для текучей среды и может фиксировать (удерживать) контейнер или отказывать в фиксации на основе данных, полученных из контейнера.
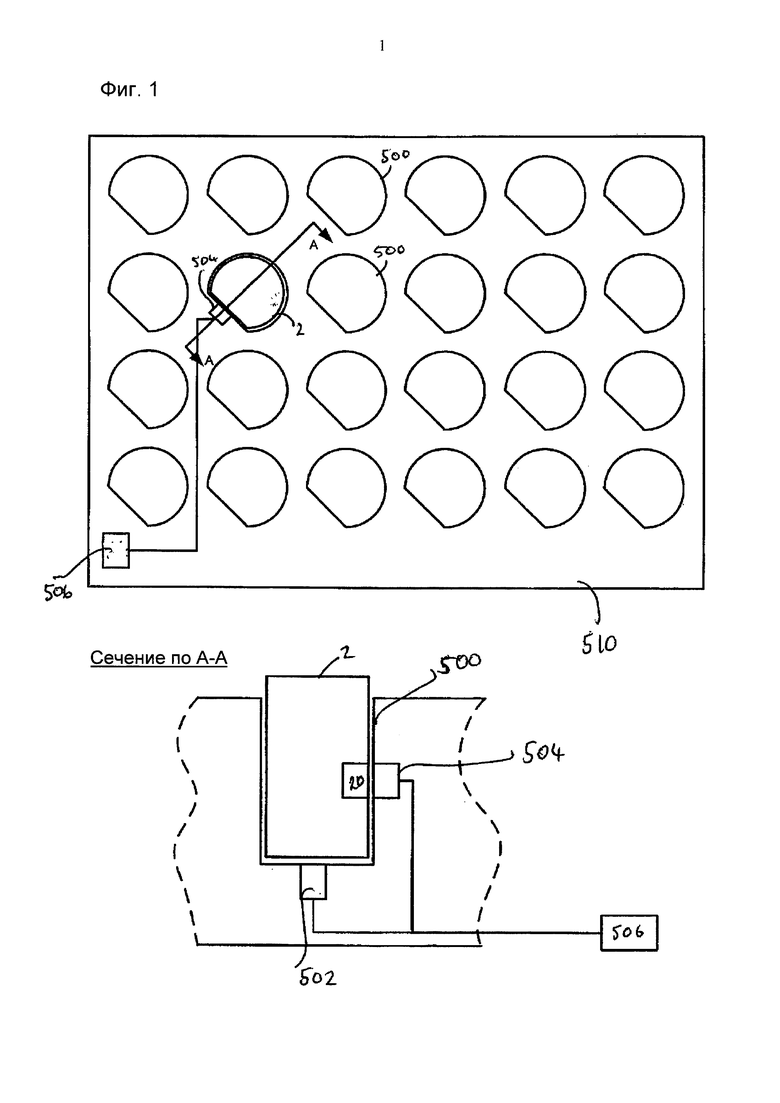
На фиг. 1 приведен вид в плане такого поддона 510 вместе с видом сечения по линии А-А. Это сечение сделано по контейнеру и по части поддона 510 на его виде в плане на основной части фиг. 1.
Поддон 510, показанный на фиг. 1, содержит множество посадочных мест для контейнеров, устройство 504 получения данных и процессор 506. Как показано на фиг. 1, каждый контейнер для текучей среды расположен на одном из посадочных мест поддона 510. На виде частичного сечения фиг. 1 показан фиксатор 502, такой как защелка, который может быть выполнен для выборочной фиксации контейнера в надлежащем положении в посадочном месте 500.
Как показано на фиг. 1, на поддоне 510 расположено упорядоченное множество посадочных мест для контейнеров. С каждым посадочным местом 500 для контейнеров соединено устройство 504 получения данных, предназначенное для получения данных из контейнера, связанного с этим посадочным местом 500. Устройства получения данных подсоединены к процессору 506 и сконфигурированы для обеспечения данных контейнеров в процессоре 506. На виде сечения по линии А-А фиг. 1 показана конфигурация, в которой процессор 506 соединен с защелкой.
Посадочные места для контейнеров, показанные на сечении по линии А-А фиг. 1, представляют собой углубления, предназначенные для удерживания контейнеров в нужном положении на поддоне 510. Посадочные места для контейнеров сформированы таким образом, что при расположении контейнера в углублении и запирании его фиксатором устройство 504 получения данных может получать данные из источника 20 данных, которым снабжен (несет) контейнер. Например, посадочное место 500 для контейнера и фиксатор выполнены таким образом, чтобы для чтения данных устройством 504 получения данных контейнер находился в надлежащем положении на фиксаторе.
Посадочные места для контейнеров, показанные на фиг. 1, имеют форму, сопряженную с формой контейнеров, которые должны в них устанавливаться. Это может обеспечивать нужную ориентацию, а также положение контейнера в посадочном месте 500. Посадочные места для контейнеров могут быть ориентированными, например, они могут иметь некоторую асимметрию, в частности они могут иметь некруглую форму или частично круглую форму в поперечном сечении. Контейнер для текучей среды может быть расположен в посадочном месте 500, и расположение контейнера (например, его положение, в частности ориентация) может задаваться геометрической формой посадочного места. Положение устройства 504 получения данных может быть выбрано в соответствии с этой геометрической формой, так что когда контейнер расположен в посадочном месте 500, это устройство может получать данные из определенной части контейнера. Это один способ, в соответствии с которым посадочное место 500 может быть сконфигурировано таким образом, что когда в нем расположен контейнер, устройство 504 получения данных может получать необходимые данные из контейнера. Возможны также и другие подходы.
Устройство 504 получения данных содержит интерфейс связи в ближней зоне, адаптированный для обмена данными с источником 20 данных, который несет контейнер. Источник 20 данных контейнера может содержать запоминающее устройство. Устройство 504 получения данных может содержать электрическое соединительное устройство, такое как токопроводящие контакты, выполненные для соединения с соответствующими контактами такого запоминающего устройства.
Процессор 506 соединен с этими устройствами получения данных и сконфигурирован для сбора данных из контейнеров и обеспечения сигнала на основе этих данных для указания характеристик контейнеров установленных на поддоне 510. Этот сигнал может быть сообщением, содержащим данные, которое передается в удаленное устройство, например, по беспроводному или проводному интерфейсу связи, в частности в удаленный сервер и/или в транспортное средство, на котором установлен поддон 510. Сигнал может также представлять собой предупреждающий сигнал, такой как звуковой или визуальный предупреждающий сигнал, который включается на поддоне 510 для указания того, что некоторый контейнер не должен быть установлен на поддоне 510. В некоторых примерах сигнал может быть управляющим сигналом для управления защелкой посадочного места 500 для контейнера, в результате чего контейнер может быть зафиксирован в посадочном месте для его транспортировки, или же в фиксации может быть отказано. Например, если процессор 506 определяет, что контейнер должен быть установлен на поддоне 510, он может подавать сигнал на защелку для фиксации контейнера в посадочном месте 500.
Защелка 502 может иметь форму зажима, кулачка или фиксирующего механизма, который взаимодействует с контейнером. Пример такого фиксатора 502 будет описан ниже со ссылками на фиг. 4, однако могут использоваться и другие типы фиксаторов.
В процессе эксплуатации контейнер для текучей среды, подлежащий транспортировке, помещают в посадочное место 500 поддона 510. Затем устройство 504 получения данных может получить данные контейнера из источника 20 данных, который несет контейнер. После этого процессор 506 определяет на основе этих данных, какие действия должны быть выполнены. Например, процессор 506 может передать по сети сообщение, содержащее данные контейнера, в удаленное устройство, такое как сервер. В другом примере процессор 506 может передать сигнал на приведение в действие фиксатора 502, такого как установочный элемент или защелка посадочного места 500, в результате чего контейнер нельзя будет извлечь из посадочного места. В этих вариантах процессор 506 может быть сконфигурирован для передачи данных контейнера по сети, после того как контейнер будут зафиксирован в посадочном месте поддона 510. В этом случае обеспечивается точный и надежный учет запасов, по мере того как контейнеры накапливаются на поддоне 510.
В некоторых вариантах процессор 506 может определить по данным, полученным из контейнера, что контейнер не может быть принят на поддоне, и в этом случае осуществляется соответствующее управление фиксатором 502. Например, процессор 506 может предотвращать фиксацию контейнера в посадочном месте фиксатором 502.
Ниже будут описаны другие альтернативы и модификации описанного подхода для сбора контейнеров для текучей среды,
Другой вариант осуществления изобретения относится к транспортировочному устройству, например, к транспортировочному вместилищу, такому как многоместная клеть для содержания контейнеров для текучей среды.
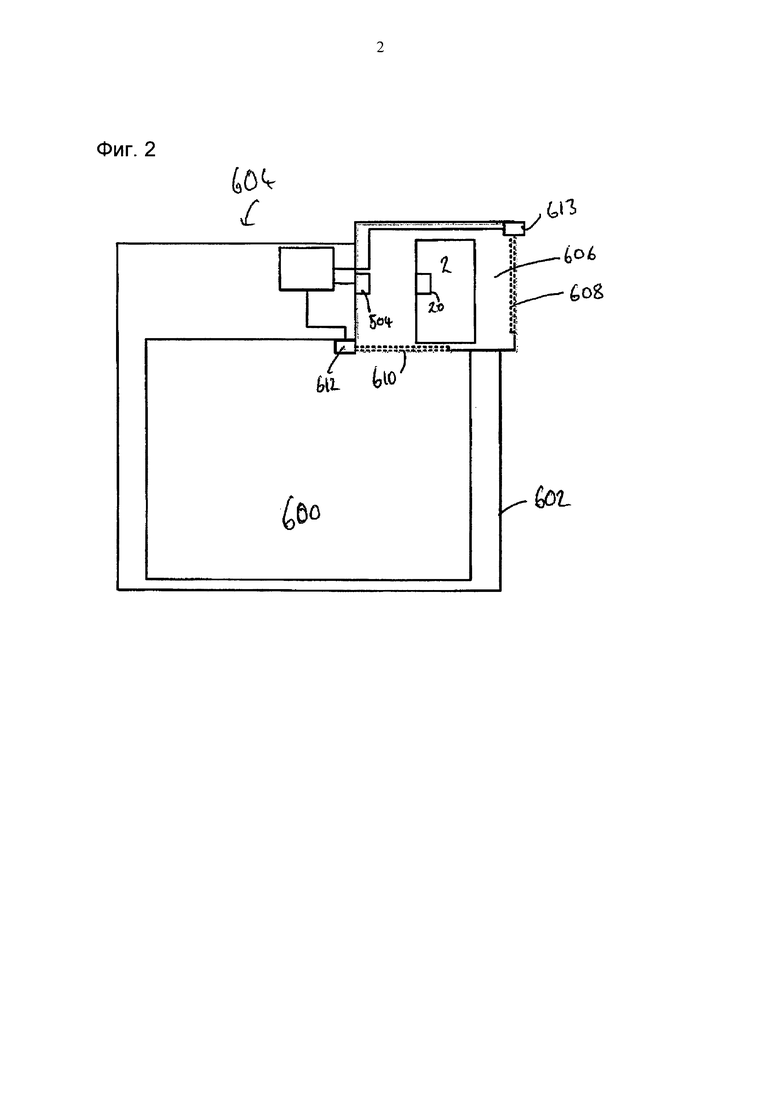
На фиг. 2 иллюстрируется один пример такого транспортировочного устройства 604. Как показано на фиг. 2, транспортировочное устройство 604 содержит несущую клеть (несущее средство) 600, заключенную в кожух 602, предотвращающий загрузку контейнеров для текучей среды в несущую клеть 600. Также обеспечивается устройство управления доступом, управление которым осуществляет процессор 506 для выборочного разрешения или отказа в загрузке контейнеров для текучей среды в несущую раму 600 на основе данных, получаемых из контейнеров.
Как показано на фиг. 2, транспортировочное устройство 604 содержит несущую клеть 600 для загрузки контейнеров для текучей среды, и эта клеть 600 закрыта защитным кожухом 602. В этом кожухе 602 выполнен проем, закрываемый устройством управления доступом, который может выборочно разрешать или запрещать загрузку контейнера для текучей среды в несущую клеть 600.
Транспортировочное устройство 604, показанное на фиг. 2, содержит процессор 506, соединенный с устройством 504 получения данных, для получения данных из контейнера, которые обеспечиваются в устройстве управления доступом. Соединение процессора 506 с устройством управления доступом включает соединение для управления приводом устройства управления доступом.
Устройство 504 получения данных транспортировочного устройства 604 может содержать любое из устройств получения данных, описанных в настоящей заявке, таких как устройство, описанное со ссылками на фиг. 1, или описанное ниже.
Как показано на фиг. 2, устройство управления доступом содержит зону 606 загрузки, в которой контейнер для текучей среды удерживается для получения из него необходимых данных. Зона 606 загрузки содержит внешний проем 608 доступа, через который контейнер может быть введен в эту зону. Для управления проходом через этот проем установлен привод 613, который может закрывать или открывать для контейнера проход через внешний проем доступа. Зона 606 загрузки также содержит внутренний проем 610 доступа, через который контейнер для текучей среды может быть загружен из зоны 606 загрузки в несущую клеть 600. Для управления проходом через этот проем установлен второй привод 612, который может открывать или закрывать проход для подачи контейнера из зоны 606 загрузки в несущую клеть 600.
Процессор 506 сконфигурирован для определения подачи контейнера в зону 606 загрузки, например, на основе сигнала датчика, соединенного с внешним проемом 608 доступа. Процессор 506 может быть также сконфигурирован для управления проходом через внешний проем 608 доступа для запрета удаления контейнера из загрузочного механизма и для получения данных из контейнера в зоне 606 загрузки с использованием устройства 504 получения данных.
После получения данных процессор 506 может определить на основе данных контейнера, следует ли разрешить загрузку этого контейнера в несущую клеть 600. В том случае, когда контейнер должен быть загружен в несущую клеть 600, процессор 506 осуществляет управление проходом через внутренний проем 610 доступа для загрузки контейнера в несущую клеть 600. Процессор 506 может также управлять проходом через внешний проем 608 доступа для запрета удаления контейнера из зоны 606 загрузки, пока внутренний проем 610 доступа открыт. Процессор 506 может быть сконфигурирован для закрытия внутреннего проема 610 доступа, когда внешний проем 608 доступа открывается.
В этом случае обеспечивается возможность надежного определения процессором 506 контейнеров, которые подходят для загрузки в несущую клеть 600, и предотвращается ситуация, в которой данные получают для одного контейнера, а решение о загрузке в несущую клеть 600 принимается в отношении следующего контейнера. Например, устройство управления доступом может работать по принципу воздушного шлюза или вращающейся двери. Хотя было описано устройство управления доступом, в котором используется зона загрузки и два проема, могут использоваться и другие загрузочные устройства. В этих и других вариантах один контейнер для текучей среды может быть закреплен в промежуточной зоне загрузочного устройства, такой как вышеописанная зона 606 загрузки. Например, эта промежуточная зона может закрываться внешней сдвижной панелью, обеспечивающей возможность загрузки контейнера в эту зону, и внутренней сдвижной панелью, препятствующей загрузке контейнера в несущую клеть 600. Когда контейнер зафиксирован устройством управления доступом (например, путем удерживания внешней сдвижной панели в закрытом положении), из него могут быть получены данные. В том случае, когда контейнер удовлетворяет определенным критериям, устройство управления доступом может обеспечить загрузку этого одного контейнера в несущую клеть 600.
Системы по настоящему изобретению могут быть использованы для распределения и/или сбора контейнеров для текучей среды и, конечно, они могут использоваться при доставке этих контейнеров для регенерации текучей среды.
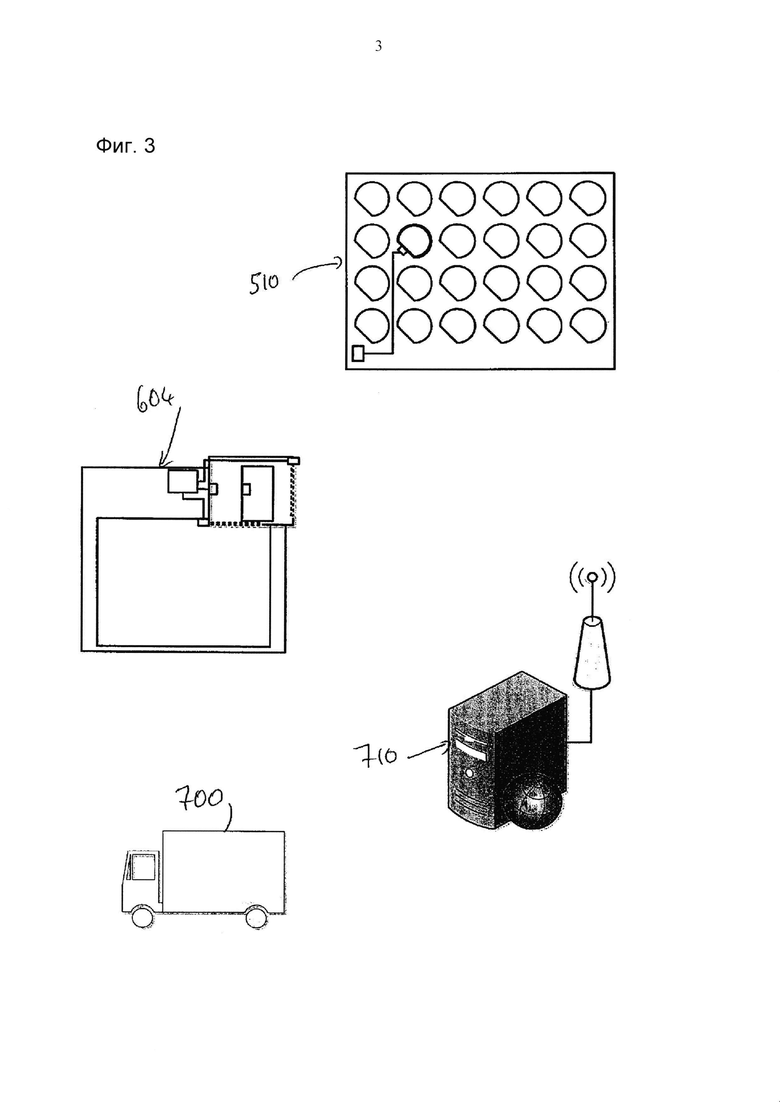
На фиг. 4 иллюстрируется одна такая система. Эта система содержит сервер 700, сконфигурированный для обмена данными по коммуникационной сети, такой как проводная или беспроводная сеть передачи данных, например глобальная сеть, такая как Интернет. Сервер 700 обменивается данными с поддонами и/или с транспортировочными устройствами, аналогичными вышеописанным. Этот сервер может принимать от одного из этих поддонов или транспортировочных устройств идентификатор конкретного контейнера и дополнительно (но не обязательно) другие данные, полученные поддоном 510 или транспортировочным устройством 604, которые могут содержать информацию, относящуюся к одному или более из: типа текучей среды, предположительно содержащейся в контейнере; транспортного средства, на котором использовался контейнер; и потребителя или оператора, который предоставил контейнер для сбора на поддоне или на транспортировочном устройстве 604. Эти другие данные могут также содержать информацию измерений, полученную в результате измерений текучей среды, например, измерений ее объема, веса, вязкости, мутности, электропроводности или некоторых других характеристик. Затем сервер может сравнить эти другие данные с записанными данными, связанными с идентификатором.
Путем такой проверки характеристик контейнера сервер может определить, соответствует ли конкретный контейнер информации, записанной по нему, и затем разрешает или запрещает его загрузку на поддон 510 или транспортировочное устройство 604 путем передачи по сети соответствующего сигнала в поддон 510. Эта же система может также обеспечивать направление сервером поддонов и транспортировочных устройств в определенные пункты назначения в соответствии с запасами контейнеров, хранящимися в этих пунктах и/или находящимися на поддонах или транспортировочных устройствах; например, сервер может быть сконфигурирован для передачи на транспортное средство команд по сбору или доставке на основе данных в отношении контейнеров, полученных из поддонов или транспортировочных устройств, находящихся на этом транспортном средстве.
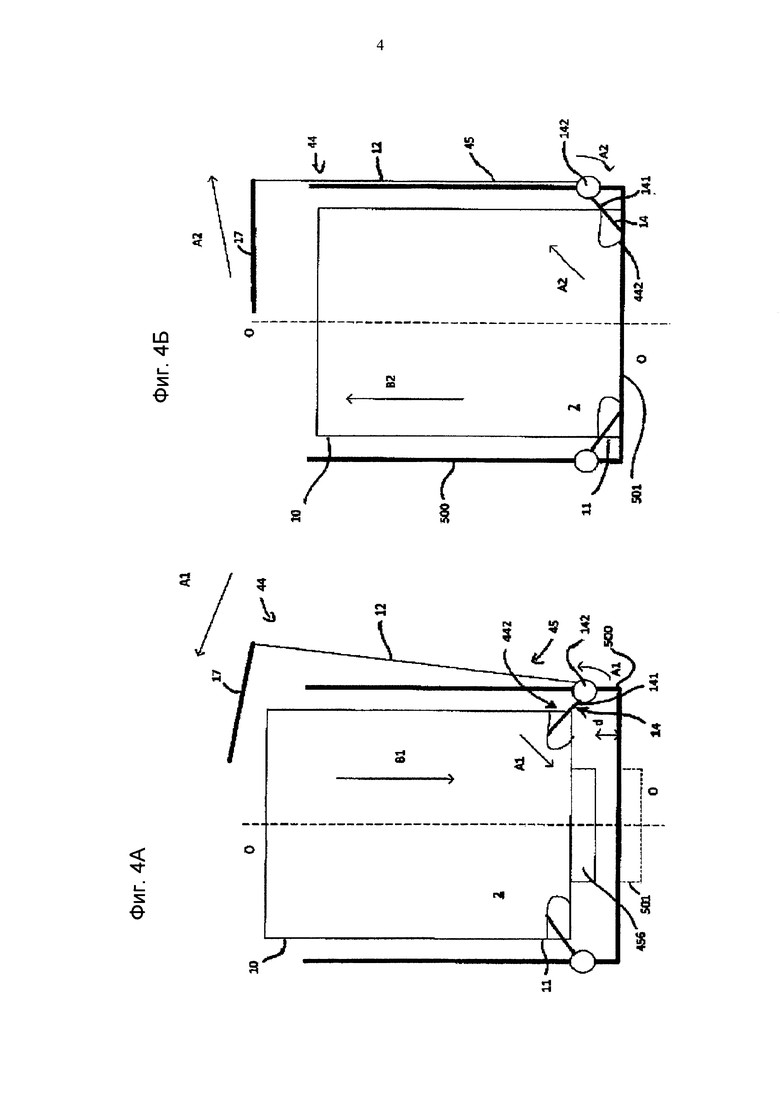
Как показано на фиг. 4А и 4Б, фиксатор 502, используемый в посадочных местах для контейнеров, представляет собой фиксирующее устройство 44, сконфигурированное для обеспечения сцепления контейнеров 2 с посадочными местами, показанными на фиг. 1. В положении отпирания фиксирующее устройство 44 обеспечивает возможность свободной установки контейнера для текучей среды на посадочное место или извлечения из него.
В положении запирания, показанном на фиг. 4Б, источник 20 данных расположен для обмена данными с устройством 504 получения данных. В положении запирания фиксирующее устройство 44 удерживает контейнер 2 для текучей среды запертым в посадочном месте 500 для предотвращения извлечения контейнера из посадочного места 500 пользователем и/или оператором поддона 500.
Как схематически показано на фиг. 4А и 4Б, фиксирующее устройство 44 может содержать привод 45, сконфигурированный для взаимодействия с сопрягающимся фиксирующим устройством 442 контейнера 2 для текучей среды.
Привод 45 может быть выполнен для перемещения между первым положением (фиг. 4А) и/или вторым положением (фиг. 4Б).
В первом положении контейнер 2 может быть свободно установлен в посадочное место 500 и/или извлечен из него пользователем и/или оператором. Для этого в первом положении привод 45 входит в зацепление с сопрягающимся фиксирующим устройством 442 контейнера 2 для текучей среды для удерживания контейнера 2 в посадочном месте 500.
Во втором положении привод 45 запирается с сопрягающимся фиксирующим устройством 442 контейнера 2 для текучей среды, например, с использованием механизмов блокировки, таких как защелки на контейнере 2 и в посадочном месте 500, упругие и/или самовозвращающиеся элементы, взаимодействующие и блокирующиеся с участием сопрягающихся элементов, такие как выступы и/или выемки. В результате во втором положении привода 45 контейнер 2 не может быть извлечен из посадочного места 500. Привод 45 необходимо перевести в первое положение, чтобы контейнер 2 можно было извлечь из посадочного места 500.
В некоторых примерах привод 45 может содержать по меньшей мере один рычаг 14. Рычаг 14 может иметь форму любого запирающего кронштейна или запирающего звена, такого как, например, кулачок. В неограничивающем примере рычаг 14 может содержать ось 142, установленную для вращения относительно посадочного места 500, и по меньшей мере один кронштейн 141 на поворотной оси 142.
Сопрягающееся запирающее фиксирующее устройство контейнера 2 может представлять собой поверхность 442, сформированная для взаимодействия с рычагом 14. Поверхность 442, взаимодействующая с рычагом, может быть любым типам взаимодействующей поверхности. В неограничивающем примере поверхность 442 может представлять собой поверхность 442, сформированную на контейнере 2 для взаимодействия с кронштейном, такую как углубление, например, желобок, обеспечиваемый на поверхности контейнера 2.
Как схематически показано на фиг. 4А и 4Б, привод 45 сконфигурирован с возможностью перемещения (показано стрелками А1) относительно посадочного места 500 для перевода контейнера 2 для текучей среды из освобожденного положения (фиг. 4А) в запертое положение (фиг. 4Б). В неограничивающем примере перемещение привода 45 может вызывать поворот оси 142 относительно посадочного места 500. При повороте оси 142 кронштейн 141 будет взаимодействовать с желобком 142 для удерживания контейнера в надлежащем положении в посадочном месте, как показано стрелкой В1.
Вместо этого или дополнительно к этому в некоторых примерах привод 45 может быть также сконфигурирован с возможностью перемещения (как показано стрелками А2) для перевода контейнера 2 для текучей среды из запертого положения (фиг. 4Б) в освобожденное положение (фиг. 4А). В неограничивающем примере перемещение привода 45 вызывает поворот оси 142. При повороте оси 142 кронштейн 141 будет взаимодействовать с желобком 142 для смещения контейнера 2 в освобожденное положение, как показано стрелкой В2.
В некоторых примерах привод 45 сконфигурирован для перевода контейнера 2 для текучей среды из освобожденного положения (фиг. 4А) в запертое положение (фиг. 4Б) в направлении (как показано стрелкой В1), перпендикулярном основанию 501 посадочного места 500. Для этой цели посадочное место 500 может содержать направляющее устройство 44, сконфигурированное для управления переводом контейнера 2 в посадочном месте 500 из освобожденного положения в запертое положение.
Вместо этого или дополнительно к этому привод 45 может быть сконфигурирован для перевода контейнера 2 для текучей среды из запертого положения (фиг. 4Б) в освобожденное положение (фиг. 4А) в направлении (как показано стрелкой В2), перпендикулярном основанию 501 посадочного места 500. Для этой цели посадочное место 500 может содержать направляющее устройство 44, сконфигурированное для управления переводом контейнера 2 в посадочном месте 500 из запертого положения в освобожденное положение.
В этом случае привод 45 может содержать по меньшей мере два рычага 14, обеспечиваемые на противолежащих частях привода 45. Указанные по меньше мере два рычага 14 могут действовать синхронно, например, относительно средней плоскости (О-О), как показано на фиг. 4А и 4Б. Указанные по меньшей мере два рычага 14 могут быть сконфигурированы для взаимодействия с двумя соответствующими поверхностями 442 контейнера 2 для текучей среды. Таким образом, симметричное расположение и одновременное перемещение двух рычагов 14 относительно средней плоскости (О-О) может обеспечивать возможность смещения контейнера 2 относительно посадочного места 500, как это уже указывалось, причем в этом случае обеспечивается по меньшей мере одно из преимуществ.
Привод может представлять собой электромеханический привод или другой преобразователь движения, и процессор 506 поддона может быть сконфигурирован для управления приводом для запирания контейнера для текучей среды в посадочном месте на поддоне или отказа в установке контейнера на поддоне на основе данных, связанных с контейнером для текучей среды.
Поддон или транспортировочное устройство 604, описанные в настоящей заявке, могут содержать запоминающее устройство, соединенное с процессором 506 и сконфигурированное для хранения одного или более из:
- данных, указывающих уровень текучей среды в контейнере, ожидаемый в соответствии с пробегом транспортного средства;
- первой совокупности данных (такой как поисковая таблица), связывающей идентификаторы контейнеров или группы идентификаторов контейнеров с конкретными типами текучих сред; и
- второй совокупности данных (такой как поисковая таблица), связывающей данные, указывающие характеристики текучих сред контейнеров, таких как мутность, электропроводность, вязкость или другие характеристики, связанные с использованием текучей среды, причем эти данные могут содержать стандартные наборы характеристик в функции от пробега.
В рассмотренных и других вариантах осуществления изобретения процессор 506 осуществляет сравнение данных, записанных в запоминающем устройстве с данными, полученными из источника 20 данных контейнера для текучей среды. Сообщение, передаваемое процессором, может содержать данные, полученные из этого запоминающего устройства. Например, процессор может быть сконфигурирован для идентификации типа текучей среды (например, типа смазочного масла (синтетическое или минеральное)) на основе идентификатора, получаемого из источника 20 данных контейнера, и передачи сообщения, идентифицирующего тип текучей среды, например, в удаленное устройство, или для использования при управлении фиксатором 502, или для включения звукового или визуального предупреждающего сигнала, как это уже указывалось.
Процессор может быть также сконфигурирован для получения данных, указывающих тип текучей среды, например, используя первую совокупность данных или непосредственно из источника 20 данных, и для использования второй совокупности данных для получения характеристик текучей среды, описывающих текучую среду, которая должна содержаться в контейнере. Эти характеристики могут быть переданы в удаленное устройство, или записаны в локальном устройстве, или использованы для сравнения с результатами измерения текучей среды в контейнере, чтобы определить также, следует ли регенерировать текучую среду, и если регенерация необходима, то как ее осуществлять.
Устройство 504 получения данных может содержать интерфейс беспроводной связи, примеры которого могут включать устройства оптической, емкостной и/или индуктивной связи. Примеры таких интерфейсов включают устройство связи в ближней зоне (NFC, от англ. Near Field Communication), такое как емкостной или индуктивный интерфейс связи, который может быть обеспечен средствами системы радиочастотной идентификации или средствами, работающими по стандарту NFC.
Устройство 504 получения данных может содержать интерфейс проводной связи, выполненной для соединения с контактами на контейнере для электрического или оптического соединения. Вышеописанный поддон также содержит процессор, сконфигурированный для разрешения установки или отказа в установке конкретного контейнера на основе полученных из него данных. Этот процессор может определять на основе полученных данных, фиксировать ли конкретный контейнер в посадочном месте поддона или отказать в фиксации контейнера в посадочном месте. В некоторых вариантах процессор может быть сконфигурирован для записи данных контейнера или для передачи их по глобальной сети в удаленное устройство, такое как сервер. Это удаленное устройство может передавать управляющий сигнал обратно в поддон для обеспечения фиксации или отказа в фиксации конкретного контейнера, и/или для указания доставки поддона в определенный пункт назначения на основе данных контейнера.
Источник данных может содержать электронное запоминающее устройство, как это было уже указано, и устройство получения данных может быть сконфигурировано для считывания из этого запоминающего устройства данных, содержащих по меньшей мере одну характеристику текучей среды, выбранную из группы, содержащей: количество текучей среды, температуру текучей среды, давление текучей среды, вязкость текучей среды, индекс вязкости текучей среды, плотность текучей среды, электрическое сопротивление текучей среды, диэлектрическую постоянную текучей среды, мутность текучей среды, химический состав текучей среды, происхождение текучей среды и комбинации двух или более перечисленных характеристик. Запоминающее устройство может быть также выполнено с возможностью получения данных из устройства управления двигателем. Это позволяет сохранять данные в контейнере. Эти сохраненные данные могут быть затем переданы из запоминающего устройства в диагностические устройства во время технического обслуживания и/или при замене контейнера. Характеристика "количество текучей среды" включает в себя также отсутствие этой среды.
Запоминающее устройство не является обязательным признаком. Машиночитаемый идентификатор может представлять собой идентификатор для оптического считывания, такой как штрих-код, например двумерный штрих-код, или маркер цветокодирования, расположенный на контейнере. Машиночитаемый идентификатор может определяться формой или конфигурацией контейнера или текстом определенного типа. Независимо от формы представления идентификатора он может быть зашифрован. Устройство получения данных может содержать оптическое считывающее устройство, сконфигурированное для считывания какого-либо или всех типов идентификаторов.
Поддон может представлять собой один блок или может быть составлен из группы модулей, который могут быть соединены между собой или поставлены друг на друга, например, модули могут быть многоместными клетями, которые могут быть составлены вместе для формирования трехмерного или двухмерного поддона. Кроме того, отдельные поддоны независимо от того, сформированы они из модулей или нет, могут быть соединены друг с другом для формирования поддонов увеличенных размеров.
Поддон может быть сконфигурирован для контейнеров, имеющих самые разные формы и/или размеры. В одном из примеров поддон может быть составлен из модулей, каждый из которых выполнен для установки контейнеров определенного размера и/или определенной формы, или же поддон может иметь посадочные места для контейнеров, имеющих разные размеры и/или формы. В других вариантах посадочные места могут быть выполнены с возможностью установки в них контейнеров разных форм и/или размеров, например, посадочные места могут иметь форму конуса или усеченного конуса, или иную суживающуюся форму, так что контейнеры меньших размеров могут садиться глубже, а контейнеры больших размеров будут находиться выше в посадочных местах. Кроме того, посадочные места могут быть выполнены с такой формой, которая обеспечивает установку контейнеров, имеющих разные формы поперечного сечения, например, посадочное место, имеющее шестиугольную форму, может принять контейнеры меньших размеров, имеющие круговую, прямоугольную, квадратную или треугольную форму поперечного сечения.
В некоторых вариантах поддон и/или отдельное коммуникационное устройство может иметь возможность обмена данными с контейнерами.
В некоторых вариантах обеспечивается возможность модификации контейнеров, установленных на поддоне или на транспортировочном устройстве, например, может обеспечиваться возможность слива текучей среды из контейнеров, либо в процессе транспортировки, либо в заданном пункте.
Примеры контейнеров, которые могут устанавливаться на поддоны или транспортировочные устройства по настоящему изобретению, описаны в международной заявке РСТ/ЕР 2013/074209, полное содержание которой вводится здесь ссылкой.
Что касается в целом чертежей, следует понимать, что схематические функциональные блок-схемы используются для иллюстрации функциональных возможностей систем и аппарата, рассмотренных в настоящем описании. Однако следует понимать, что для реализации этих функциональных возможностей необязательно должно быть такое разбиение как на схемах, и для реализации этих функциональных возможностей могут использоваться и иные схемы аппаратных средств, отличающиеся от описанных и заявленных ниже. Функция одного или нескольких элементов, показанных на чертежах, может быть дополнительно разбита и/или распределена между разными частями устройства по настоящему изобретению. В некоторых вариантах функции одного или нескольких элементов, показанных на чертежах, могут быть объединены в одном функциональном блоке.
Вышеприведенные варианты осуществления изобретения должны пониматься как иллюстративные примеры. Могут быть предложены и другие варианты. Следует понимать, что любой признак, указанный в связи с каким-либо вариантом, может использоваться отдельно или в комбинации с другими указанными признаками и может также использоваться в комбинации с одним или несколькими признаками любых других вариантов, а также может использоваться любая комбинация любых других вариантов. Кроме того, могут использоваться также не указанные здесь эквиваленты и модификации рассмотренных вариантов без выхода за пределы объема изобретения, который определяется прилагаемой формулой.
В некоторых примерах одно или несколько запоминающих устройств могут хранить данные и/или программные команды, используемые для осуществления вышеуказанных действий. В вариантах осуществления изобретения также предлагаются материальные энергонезависимые носители информации, содержащие программные команды для программирования процессора для реализации одного или более вышеописанных и/или заявленных способов и/или для обеспечения вышеописанного и/или заявленного устройства обработки данных.
Действия и устройство, рассмотренные в настоящем описании, могут быть реализованы с использованием контроллеров и/или процессоров, которые могут быть запрограммированными устройствами, такими как сборки логических элементов, или логическими схемами, программируемыми пользователем, такими как программное обеспечение и/или программные команды, исполняемые процессором. Другие типы программируемых логических схем включают программируемые процессоры, программируемые цифровые логические схемы (например, программируемая вентильная матрица, программируемое постоянное запоминающее устройство, программируемое постоянное запоминающее устройство с электрическим стиранием), специализированные интегральные микросхемы или любые другие типы цифровых логических схем, программное обеспечение, коды, электронные команды, флеш-память, оптические диски, диски CD-ROM, диски DVD ROM, магнитные или оптические карточки, другие типы машиночитаемых носителей информации, подходящих для хранения электронных команд, или любые подходящие комбинации перечисленных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНОЕ ПОЛУРЫЧАЖНОЕ ШАССИ | 2014 |
|
RU2652869C2 |
| УСОВЕРШЕНСТВОВАННАЯ КОНСТРУКЦИЯ ВХОДНОГО УСТРОЙСТВА | 2018 |
|
RU2727820C2 |
| СПОСОБ, КОМПЬЮТЕРНАЯ ПРОГРАММА, УСТРОЙСТВО И СИСТЕМА | 2008 |
|
RU2493679C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПРИШВАРТОВАННЫХ ВИНТОКРЫЛЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2665993C2 |
| МОНИТОР ПРОГРЕССА ДОСТАВКИ АКТИВНОСТИ | 2011 |
|
RU2574986C9 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДСКАЗАНИЯ ВЕТВЛЕНИЙ | 2012 |
|
RU2602335C2 |
| МЕХАНИЗМ ОБРАТНОЙ СВЯЗИ И БЛОКИРОВКИ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2009 |
|
RU2492822C2 |
| УСТРОЙСТВО СМЕШИВАНИЯ ИНДИВИДУАЛЬНОЙ КОСМЕТИКИ | 2013 |
|
RU2635782C2 |
| СМЕСИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ТЕКУЧИХ СРЕД | 2018 |
|
RU2731221C1 |
| СПОСОБ И ОБОРУДОВАНИЕ ДЛЯ УДАЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ ИЗ КЛАПАНОВ ТЕКУЧЕЙ СРЕДЫ | 2011 |
|
RU2576757C2 |
Изобретение относится к поддону, содержащему множество посадочных мест, каждое из которых предназначено для установки контейнера для текучей среды, устройство получения данных для получения данных контейнера из источника данных контейнера, установленного на поддоне, процессор, соединенный с устройством получения данных и сконфигурированный для обеспечения сигнала на основе данных контейнера. 12 з.п. ф-лы, 5 ил.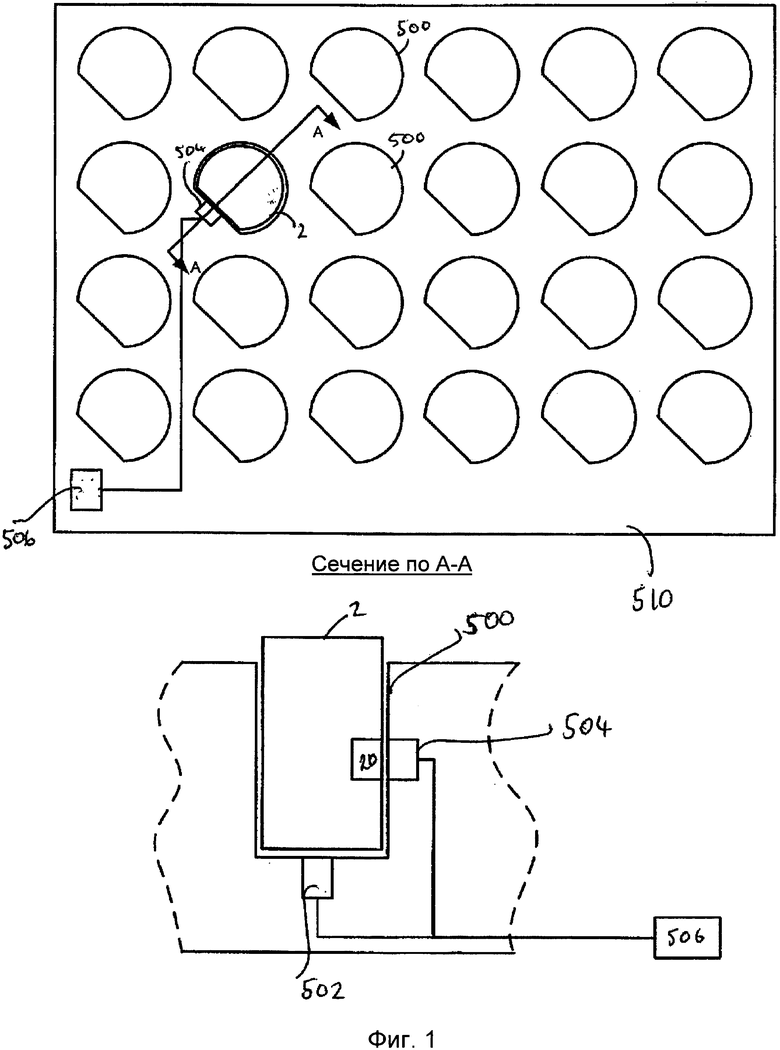
1. Поддон, содержащий:
множество посадочных мест, каждое из которых приспособлено для установки контейнера для текучей среды;
устройство получения данных для получения данных контейнера из источника данных, которым снабжен устанавливаемый контейнер для текучей среды;
процессор, соединенный с устройством получения данных и сконфигурированный с возможностью обеспечения сигнала на основе данных контейнера,
причем каждое из множества посадочных мест выполнено с возможностью фиксации контейнера так, что предотвращается его извлечение из посадочного места, и с возможностью отказа в фиксации контейнера так, что предотвращается его транспортировка на посадочном месте, а сигнал содержит указание в отношении фиксации или отказа в фиксации контейнера, от которого были получены данные.
2. Поддон по п. 1, в котором процессор подсоединен с возможностью обеспечения сигнала для управления посадочным местом для контейнера.
3. Поддон по любому из предыдущих пунктов, содержащий интерфейс беспроводной связи, соединенный с процессором для обмена данными с удаленным устройством.
4. Поддон по п. 3, в котором процессор сконфигурирован с возможностью обеспечения удаленного устройства данными контейнера.
5. Поддон по п. 4, в котором сигнал обеспечивается на основе данных, полученных из удаленного устройства в ответ на данные контейнера.
6. Поддон по любому из предыдущих пунктов, в котором каждое посадочное место для контейнера содержит установочный элемент для сцепления с сопрягающимся установочным элементом контейнера, который должен быть установлен в посадочном месте, а устройство получения данных сконфигурировано с возможностью получения данных от посадочного места, когда установочные элементы посадочного места и контейнера входят в сцепление.
7. Поддон по п. 6, в котором установочный элемент посадочного места сконфигурирован с возможностью задания по меньшей мере одного из положения и ориентации контейнера в посадочном месте, так что когда установочный элемент входит в сцепление с контейнером, этот контейнер будет размещен с возможностью обеспечения данными устройства получения данных.
8. Поддон по п. 7, в котором устройство получения данных сконфигурировано с возможностью получения данных из контейнера, размещенного в конкретном посадочном месте, когда установочный элемент конкретного посадочного места входит в сцепление с сопрягающимся установочным элементом контейнера.
9. Поддон по п. 8, в котором установочный элемент посадочного места содержит по меньшей мере одно из защелки и асимметричной формы посадочного места.
10. Поддон по любому из предыдущих пунктов, в котором сигнал содержит по меньшей мере одно из звукового и визуального предупреждающего сигнала.
11. Поддон по любому из предыдущих пунктов, в котором устройство получения данных содержит по меньшей мере один из беспроводного и проводного интерфейса электронной связи, сконфигурированного с возможностью обмена данными с контейнером, установленном в конкретном посадочном месте.
12. Поддон по п. 11, в котором устройство получения данных сконфигурировано с возможностью получения данных измерений, указывающих по меньшей мере одну характеристику текучей среды, содержащейся в контейнере, установленном в конкретном посадочном месте.
13. Поддон по п. 12, в котором процессор сконфигурирован с возможностью обеспечения сигнала на основе сравнения данных измерений с данными контейнера, полученными из машиночитаемой характеристики конкретного контейнера.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ ПЕРЕРАБОТКИ РАСТИТЕЛЬНОГО СЫРЬЯ ДЛЯ ПОЛУЧЕНИЯ ПЕНТОЗНЫХ ГИДРОЛИЗАТОВ, СОДЕРЖАЩИХ, ПРЕИМУЩЕСТВЕННО, КСИЛОЗУ | 1997 |
|
RU2109059C1 |
| DE 29812678 U1, 29.10.1998 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 6483434 B1, 19.11.2002 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

