Область техники
Настоящее изобретение относится в целом к системам обеспечения безопасности винтокрылых летательных аппаратов. Более точно, настоящее изобретение относится к системе и способу обнаружения пришвартованных летательных аппаратов и генерирования предупреждений до и во время попытки взлета при наличии по меньшей мере одного пришвартованного аппарата.
Уровень техники
Швартовочные устройства используются для крепления винтокрылых летательных аппаратов, таких как вертолеты, к поверхности, на которую может опираться винтокрылый летательный аппарат (далее - опорная поверхность). Опорные поверхности включают, например, посадочные поверхности, такие как посадочная площадка или палуба судна. Швартовочные устройства могут размещаться на винтокрылом летательном аппарате в положениях, называемых швартовочными точками. Швартовочные устройства также могут устанавливаться на опорной поверхности. Для крепления швартовочного устройства винтокрылого летательного аппарата к швартовочному устройству на опорной поверхности могут использоваться крепежные элементы, такие как канаты, стропы, цепи и т.п.с крюками или зажимами на каждом конце. Используемый далее термин "швартовочный узел" означает сочетание компонентов, таких как швартовочные устройства, крепежные элементы и крюки или зажимы, соответствующим образом сконфигурированные для крепления швартовочной точки на винтокрылом летательном аппарате к опорной поверхности. По существу, когда со швартовочным устройством винтокрылого летательного аппарата соединен крепежный элемент, швартовочное устройство винтокрылого летательного аппарата именуется "закрепленным". Аналогичным образом, когда один конец заданного швартовочного узла соединен с винтокрылым летательным аппаратом, а другой конец соединен с опорной поверхностью, швартовочный узел именуется "закрепленным". Закрепленные швартовочные узлы защищают винтокрылый летательный аппарат от возможного повреждения, например, при сильном волнении на море и/или ветреной погоде. Перед взлетом все швартовочные узлы и швартовочные устройства должны быть отсоединены; тем не менее, иногда в аварийных или чрезвычайных ситуациях одно или несколько швартовочных устройств могут быть случайно оставлены закрепленными, что ограничивает подвижность винтокрылого летательного аппарата и может вызвать его переворот. Попытка взлета происходит при начале отрыва винтокрылого летательного аппарата от опорной поверхности. Значительное число происшествий с вертолетами связано с попытками взлета при закрепленных швартовочных устройствах, а о попытках взлета при закрепленных швартовочных устройствах, которые не привели к подлежащим регистрации происшествиям, во многих случаях не сообщается.
Соответственно, желательно создать систему обнаружения швартовки винтокрылых летательных аппаратов, которая обнаруживает закрепленные швартовочные устройства и генерирует предупреждения до и во время попытки взлета, если по меньшей мере одно швартовочное устройство винтокрылого летательного аппарата остается закрепленным. Такая система обнаружения швартовки улучшила бы ситуационную информированность и безопасность.
Другие желательные признаки станут ясны из следующего далее подробного описания и прилагаемой формулы изобретения в сочетании с сопровождающими чертежами и данным разделом описания.
Сущность изобретения
Предложен способ обнаружения по меньшей мере одного закрепленного швартовочного устройства винтокрылого летательного аппарата. По меньшей мере одно закрепленное швартовочное устройство обнаруживается датчиком, который в ответ генерирует предупреждение.
Также предложен способ повышения безопасности винтокрылых летательных аппаратов. Осуществляется контроль с помощью по меньшей мере одного датчика. Если обнаружено по меньшей мере одно закрепленное швартовочное устройство винтокрылого летательного аппарата, генерируется предупреждение, касающееся соответствующего закрепленного швартовочного устройства.
Также предложена система обнаружения по меньшей мере одного закрепленного швартовочного устройства винтокрылого летательного аппарата. В систему входит первый датчик, связанный по меньшей мере с одним швартовочным устройством. Первый датчик определяет, соединено ли швартовочное устройство с крепежным элементом. Если швартовочное устройство соединено с крепежным элементом, процессор генерирует предупреждение об опасности.
Данный раздел описания имеет целью представление в упрощенной форме ряда идей, которые дополнительно рассмотрены далее в подробном описании. Он не имеет целью ни определение ключевых или существенных признаков, ни ограничение объема заявленного изобретения.
Краткое описание чертежей
Изобретение может быть лучше понято из подробного описания и формулы изобретения при их рассмотрении со ссылкой на следующие чертежи, на которых одинаковые элементы обозначены одинаковыми позициями и на которых:
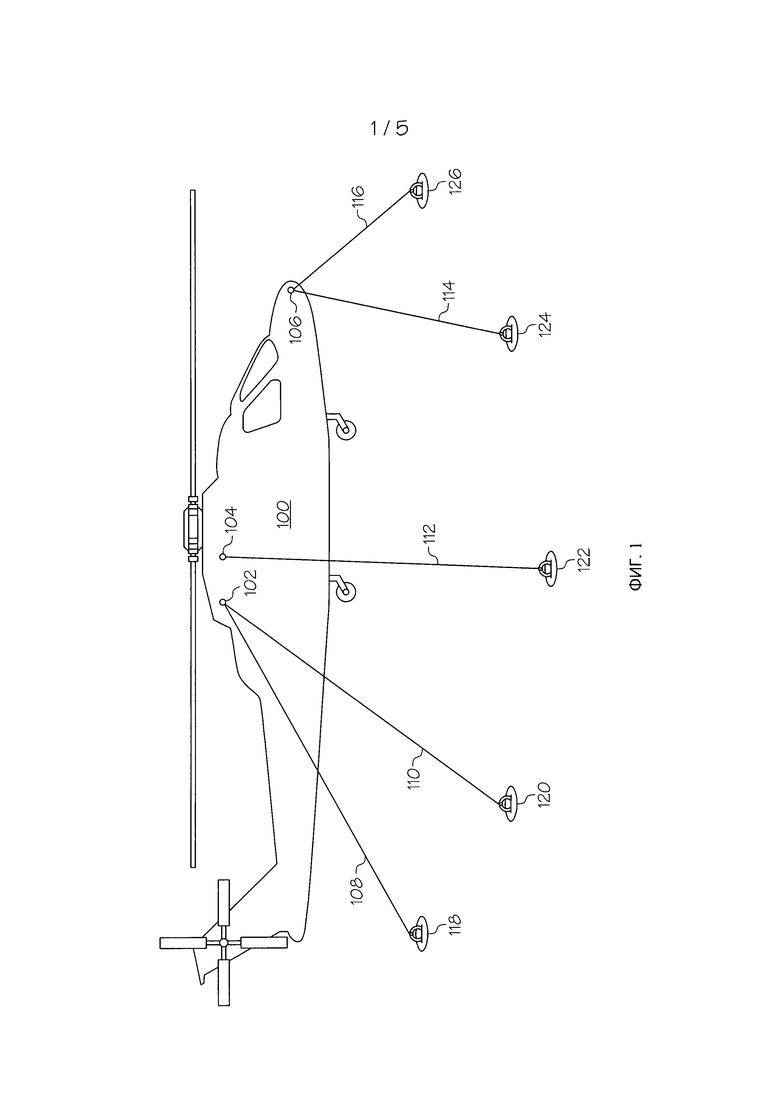
на фиг. 1 схематически показан вертолет с крепежными элементами, соединяющими швартовочные устройства на вертолете со швартовочными устройствами на опорной поверхности,
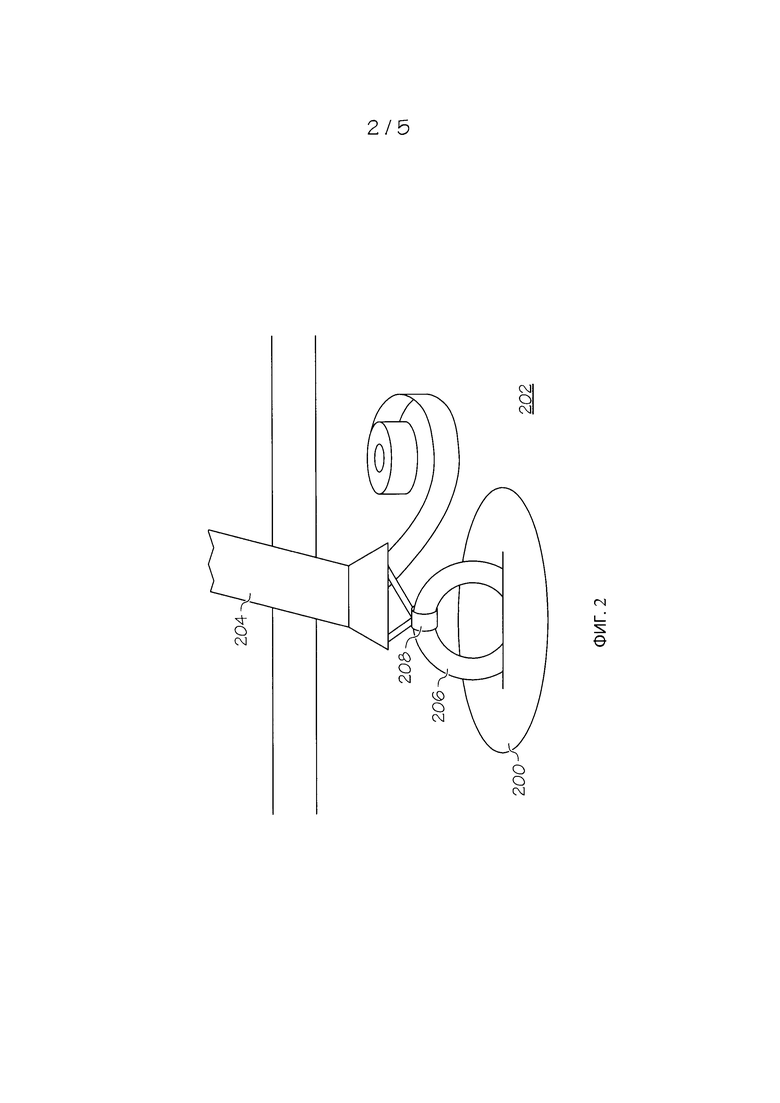
на фиг. 2 схематически показано швартовочное устройство на опорной поверхности с закрепленным крепежным элементом,
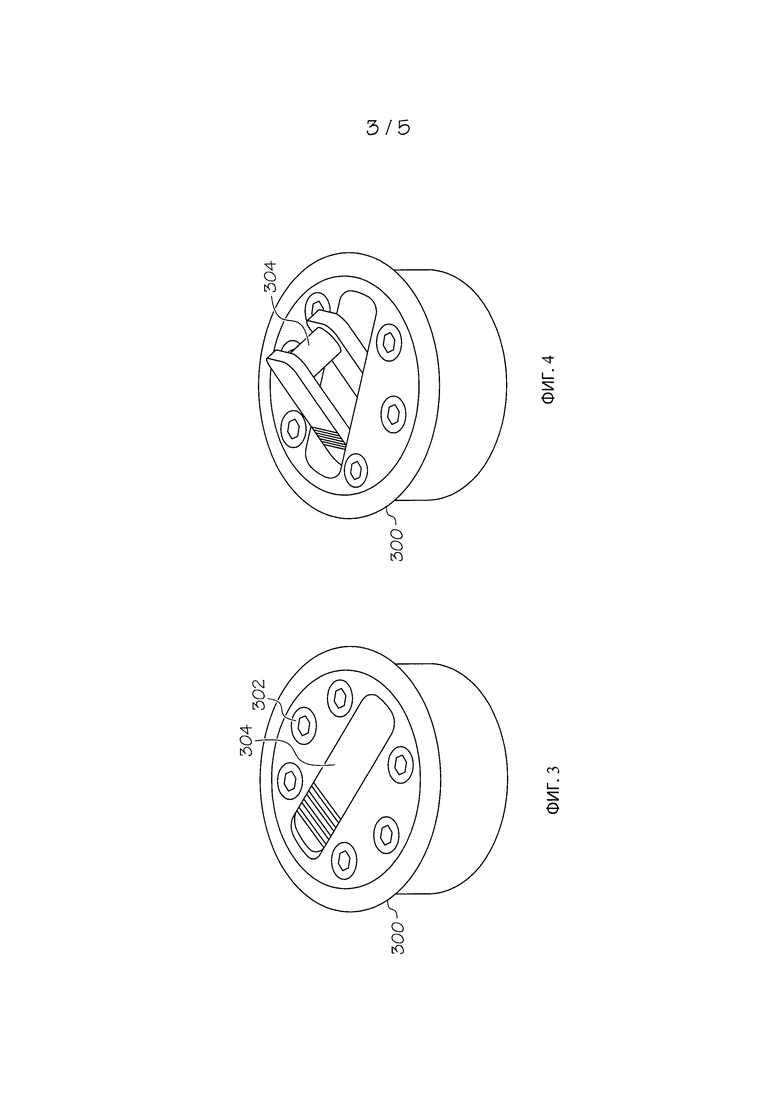
на фиг. 3 схематически показано швартовочное устройство на опорной поверхности,
на фиг. 4 более подробно схематически показано швартовочное устройство на опорной поверхности,
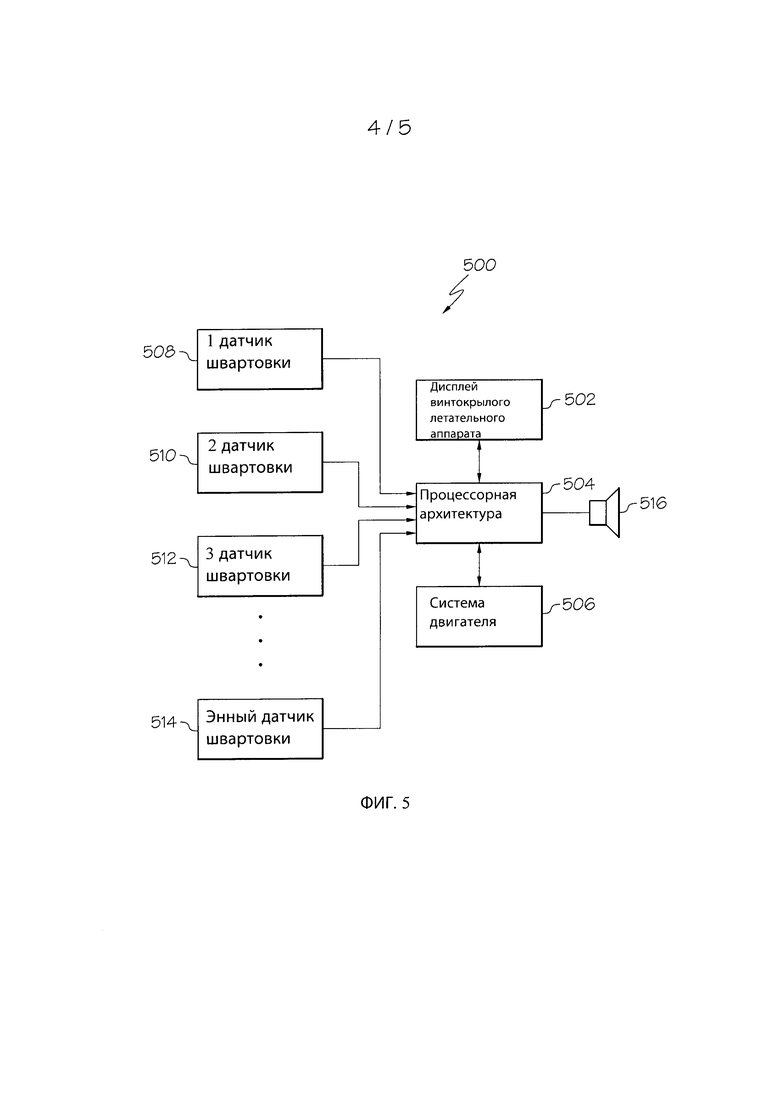
на фиг. 5 показана блок-схема системы обнаружения пришвартованных летательных аппаратов согласно одному из примеров осуществления, и
на фиг. 6 показана блок-схема, иллюстрирующая один из примеров осуществления системы обнаружения пришвартованных летательных аппаратов.
Подробное описание изобретения
Следующее далее подробное описание является по своей сути лишь наглядным и не имеет целью ограничение вариантов осуществления изобретения или применимость и использование таких вариантов осуществления. Используемый термин "в качестве примера" означает "служащий примером, образцом или иллюстрацией". Любая реализация, описанная в качестве примера, необязательно должна считаться предпочтительной или преимущественной по сравнению с другими реализациями. Кроме того, содержание предыдущих разделов "Область техники", "Предпосылки создания изобретения" и "Краткое изложение сущности изобретения" или следующего далее подробного описания не ограничено какой-либо теорией, представленной в прямой или подразумеваемой форме.
Описанные в изобретении методы и технологии могут быть представлены в терминах, относящихся к компонентам функциональных и/или логических блоков и символическим записям операций, рабочих задач и функций, которые могут выполняться различными вычислительными компонентами или устройствами. Такие операции, задачи и функции иногда именуются выполняемыми компьютером, компьютеризованными, программно реализованными или реализованными в компьютере. Следует учесть, что различные компоненты блоков, представленные на чертежах, могут быть реализованы посредством любого числа аппаратных, программных и/или программно-аппаратных компонентов, сконфигурированных на выполнение заданных функций. Например, в каком-либо варианте осуществления системы или компонентов могут применяться различные компоненты интегральных схем (например, запоминающие элементы, элементы цифровой обработки сигналов, логические элементы, справочные таблицы и т.п.), которые могут выполнять разнообразные функции под управлением одного или нескольких микропроцессоров или других управляющих устройств.
Описанные в изобретении система и способы могут быть реализованы в любом транспортном средстве, которое может крепиться посредством швартовочных устройств, таком как винтокрылый летательный аппарат. Хотя в описанном примере осуществления предполагается, что двигатель винтокрылого летательного аппарата выключен до запуска системы обнаружения пришвартованных летательных аппаратов, тем не менее, датчики швартовочного устройства могут обнаруживать закрепленные швартовочные узлы при работающем двигателе винтокрылого летательного аппарата.
Кроме того, описанные в изобретении система и способы генерируют предупреждение в ответ на обнаружение по меньшей мере одного закрепленного швартовочного узла. Предупреждение может быть выражено в форме символов, отображаемых на предусмотренном дисплее винтокрылого летательного аппарата. В качестве альтернативы, предупреждением может являться акустическое предупреждение об опасности, которое может в форме символов отображаться на отдельном дисплее. Система обнаружения может предотвращать запуск двигателя винтокрылого летательного аппарата пилотом. В некоторых вариантах осуществления предупреждение отображается на графическом дисплее винтокрылого летательного аппарата с визуальной индикацией конкретного швартовочного узла или его компонентов, которые остаются закрепленными.
Швартовочные узлы содержат швартовочные устройства, которые установлены в швартовочных точках на винтокрылом летательном аппарате и на опорной поверхности. Существуют швартовочные устройства множества типов, которые могут выбираться в соответствии с требованиями конкретного применения. Факторы, принимаемые во внимание при выборе швартовочного устройства, могут включать средний вес при взлете (MTOW) винтокрылого летательного аппарата, желаемое число швартовочных точек на винтокрылом летательном аппарате, тип используемых крепежных элементов, погодные и/или климатические соображения и т.п.
Крепежные элементы швартовочного узла крепят неподвижный винтокрылый летательный аппарат к опорной поверхности. Иными словами, первый конец крепежного элемента соединен со швартовочным устройством на винтокрылом летательном аппарате, а второй конец крепежного элемента соединен со швартовочным устройством на опорной поверхности. Крепежные элементы могут представлять собой цепи, кабели, стропы и т.д. и могут иметь крюки, зажимы и т.п. на каждом конце. Крепежный элемент может обладать проводящей способностью и может электрически взаимодействовать с одним или несколькими датчиками. Например, когда крепежный элемент закреплен, он может проводить ток между швартовочными устройствами на опорной поверхности и винтокрылым летательным аппаратом, и прекращать проводить ток, когда он отсоединен. В другом примере осуществления в любом швартовочном устройстве могут использоваться индукционные датчики для обнаружения присутствия металлических крепежных элементов.
Датчики могут устанавливаться на швартовочных устройствах в различных положениях. В одном из вариантов осуществления датчики установлены на швартовочных устройствах на винтокрылом летательном аппарате. В некоторых вариантах осуществления датчики могут быть установлены на швартовочных устройствах на опорной поверхности. В других вариантах осуществления датчики могут быть установлены на крепежном элементе, крюках или зажимах. В других вариантах осуществления датчики могут быть установлены как на швартовочных устройствах на винтокрылом летательном аппарате, так и на швартовочных устройствах на опорной поверхности. Датчики служат для обнаружения закрепленного швартовочного узла. Могут использоваться датчики различных типов, например, датчики давления, датчики проводимости, датчики электрических сигналов, индукционные датчики, датчики радиочастотных сигналов и т.д.
На фиг. 1 схематически показан винтокрылый летательный аппарат (далее - вертолет) 100 с крепежными элементами, соединяющими швартовочные устройства на вертолет со швартовочными устройствами на опорной поверхности. На фиг. 1 показан вертолет 100 с множеством швартовочных узлов. Показано, что швартовочные узлы состоят из швартовочных устройств 102, 104 и 106 на вертолете, крепежных элементов 108, 110, 112, 114 и 116 и швартовочных устройств 118, 120, 122, 124 и 126 на опорной поверхности.
Хотя для простоты на фиг. 1 показаны крепежные элементы и швартовочные устройства только с одной стороны вертолета 100, легко понять, что вертолет 100 прикреплен крепежными элементами к швартовочным устройствам со всех сторон. Число и размещение швартовочных устройств на вертолете варьирует в зависимости от типа вертолета; по существу, соответствующими швартовочными устройствами может быть снабжен даже несущий винт вертолета. Аналогичным образом, число и размещение швартовочных устройств на опорной поверхности может варьировать. Наконец, при креплении вертолета к опорной поверхности пилот или экипаж использует то число крепежных элементов и швартовочных устройств, которое соответствует ситуации. На фиг. 2 показано швартовочное устройство 200, крепежный элемент 204 и опорная поверхность 202. Видно, что крепежный элемент 204 прикреплен к швартовочному устройству 200. Опорной поверхностью 202 может служить бетон, асфальт или любая другая применимая поверхность, такая как палуба судна.
В качестве примера, швартовочное устройство 200 имеет кольцевидную петлю 206, к которой с помощью крюка или зажима 208 крепится крепежный элемент 204. В качестве примера, крепежный элемент 204 представляет собой стропу; тем не менее, как описано в изобретении, в качестве альтернативы, крепежный элемент может представлять собой трос, стропу, цепь и т.п.
На фиг. 3 показаны 4 изометрические изображения швартовочного устройства 300, которое может быть установлено на опорной поверхности. Швартовочное устройство 300 может крепиться к опорной поверхности крепежными элементами 302, такими как винты, болты, адгезивы и т.п. В качестве альтернативы, швартовочное устройство 300 может быть приварено к опорной поверхности или внедрено в нее, например, в случае опорных поверхностей из бетона, асфальта и т.п. В качестве примера, швартовочное устройство 300 имеет поворотный "глаз" 304 (показанный закрытым), который способствует его совмещению с вертолетом. На фиг. 4 показан открытый поворотный глаз 304 для крепления крепежного элемента. Когда швартовочное устройство 300 не используется, поворотный глаз 304 может быть закрыт, как показано на фиг. 3, и швартовочное устройство находится заподлицо с опорной поверхностью.
На фиг. 5 показана блок-схема 500 системы обнаружения пришвартованных летательных аппаратов согласно одному из примеров осуществления. На фиг. 5 не представлено большое число систем и подсистем, которые применялись бы при практической реализации вертолета 100. Вместо этого на фиг. 5 проиллюстрированы важные элементы и компоненты вертолета 100, которые обеспечивают различные признаки, функции и операции, подробнее описанные далее. Соответственно, вертолет 100 может быть без ограничения оснащен дисплеем 502, процессорной архитектурой 504, устройством 516 для генерирования акустического предупреждения об опасности и системой 506 двигателя. Множество датчиков 508, 510, 512 и 514 швартовочных узлов связано с процессорной архитектурой 504, необходимой для обеспечения их совместных функциональных возможностей.
Процессорная архитектура 504 может быть воплощена или реализована по меньшей мере в одном универсальном процессоре, ассоциативной памяти, процессоре цифровой обработки сигналов, специализированной интегральной схеме, вентильной матрице с эксплуатационным программированием, любом применимом программируемом логическом устройстве, схеме на дискретных компонентах или транзисторной логической схеме, дискретных аппаратных компонентах или любом сочетании, рассчитанном на выполнение описанных в изобретении функций. Процессор может быть реализован в форме микропроцессора, контроллера, микроконтроллера или конечного автомата. Кроме того, процессор может быть реализован в форме сочетания вычислительных устройств, например, сочетания процессора цифровой обработки сигналов и микропроцессора, множества микропроцессоров или одного или множества микропроцессоров с ядром процессора цифровой обработки сигналов или любой другой такой конфигурации. Как подробнее описано далее, процессорная архитектура 504 сконфигурирована на обеспечение различных операций и функций отображения.
На практике процессорная архитектура 504 может быть реализована в форме бортового компонента вертолета 100 (например, системы управления в кабине экипажа, системы управления полетом и т.п.) или в портативно вычислительном устройстве, которое находится на борту вертолета 100. Например, процессорная архитектура 504 может быть реализована в форме центрального процессора (ЦП) портативного компьютера, планшета или карманного устройства. В качестве другого примера, процессорная архитектура 504 может быть реализована в форме ЦП электронного планшета пилота, который имеет один из членов экипажа или который постоянно установлен на вертолете. Электронные планшеты пилота и их применение описаны в документах Федерального авиационного агентства США, таких как АС 120-76А.
Процессорная архитектура 504 может содержать память или взаимодействовать с памятью соответствующего объема (не показанной), которая может быть реализована в форме ОЗУ, флэш-памяти, СППЗУ, ЭСППЗУ, регистров, жесткого диска, съемного диска, ПЗУ на компакт-диске или в форме любой другой известной из техники запоминающей среды. Соответственно, память может быть связана с процессорной архитектурой 504, которая может считывать данные из памяти и записывать данные в память. В качестве альтернативы, память может быть объединена с процессорной архитектурой 504. На практике функциональный или логический модуль/компонент описанной в изобретении системы может быть реализован с использованием программного кода, который хранится в памяти. Кроме того, память может служить для хранения данных, используемых для поддержки работы системы, как станет ясно из дальнейшего описания.
Сигналы датчиков 508, 510, 512 и 514 швартовки передаются процессорной архитектуре 504. В процессорную архитектуру также поступают данные состояния двигателя от системы 506 двигателя. Процессорная архитектура 504 определяет, следует ли генерировать предупреждение, на основании по меньшей мере состояния двигателя и сигналов датчиков 508, 510, 512 и 514 швартовки. В одном из вариантов осуществления процессорная архитектура 504 генерирует предупреждение, если при начале взлета закреплен по меньшей мере один швартовочный узел. От процессорной архитектуры 504 поступает предупреждение на дисплей 502, на котором для пользователя отображаются предупреждения в световом, символическом или другом видимом представлении. Предупреждения предупреждают пилота о том, что продолжение взлета небезопасно. Устройство 516 может генерировать акустическое предупреждение об опасности.
Датчики 508, 510, 512 и 514 швартовки представляют собой различные датчики, детекторы, диагностические компоненты и их соответствующе подсистемы в швартовочных узлах. Соответственно, датчики 508, 510, 512 и 514 швартовки действуют как источники данных состояния швартовочных узлов на вертолете и опорной поверхности. Как описано в изобретении, датчиками 508, 510, 512 и 514 швартовки могут являться датчики давления, датчики проводимости, датчики электрических сигналов, индукционные датчики, датчики радиочастотных сигналов и т.д. В некоторых вариантах осуществления датчик может взаимодействовать с закрепленным крепежным элементом; например, сам крепежный элемент может являться проводящим и тем самым способным передать сигнал, принимаемый процессорной архитектурой 504.
Датчики 508, 510, 512 и 514 швартовки, процессорная архитектура 504 и система 506 двигателя соответствующим образом сконфигурированы на динамическое реагирование с целью подачи предупреждений в реальном времени во время эксплуатации вертолета. Процессорная архитектура 504 принимает данные от системы 506 двигателя и датчиков 508, 510, 512 и 514 швартовки и управляет слиянием, объединением и интегрированием этих данных с данными из других источников, результат чего отображается на дисплее 502. Дисплей 502 может быть соответствующим образом сконфигурирован на прием выходных данных от процессорной архитектуры 504 и соответствующее отображение принимаемых предупредительных данных. В качестве альтернативы, предупредительные данные могут отображаться в беспроводном режиме на дисплее, который имеет один из членов экипажа.
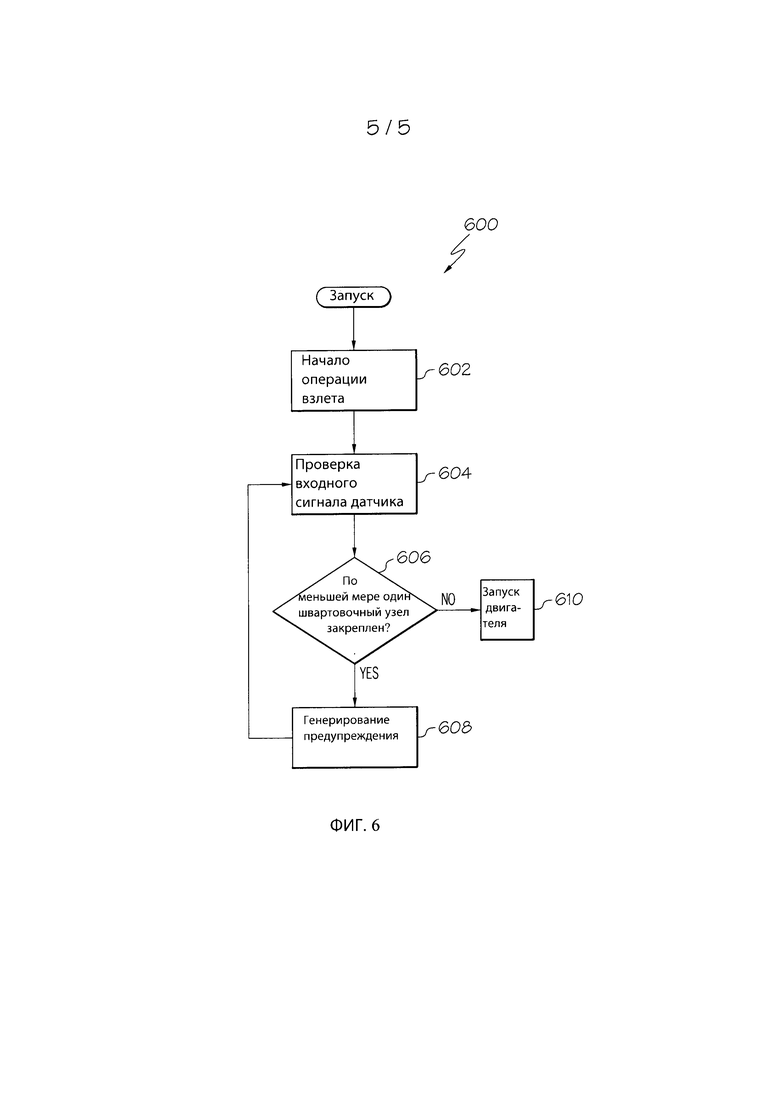
На фиг. 6 показана блок-схема, иллюстрирующая один из примеров осуществления способа 600 обнаружения швартовки вертолета, который выполняется процессорной архитектурой 504. Различные задачи, связанные с выполнением способа, могут выполняться программным обеспечением, аппаратным обеспечением, аппаратно-программным обеспечением или любым их сочетанием. Следует учесть, что способ 600 может включать любое число дополнительных или альтернативных шагов, шаги, проиллюстрированные на фиг. 6, необязательно следуют в показанном порядке, и способ 600 может входить в состав более общей процедуры или способа с дополнительными функциональными возможностями, подробно не описанными в изобретении. Кроме того, в одном из вариантов осуществления один или несколько шагов способа 600, показанных на фиг. 6, могут быть опущены при условии сохранения заданных общих функциональных возможностей.
В одном из примеров осуществления способ 600 обнаружения швартовки вертолета выполняется при начале операции взлета. Операции взлета обычно начинаются при включенном питании вертолета (в положении "вкл.") (шаг 602). От системы 506 двигателя поступают данные состояния двигателя, например, питание "вкл." или питание "выкл.". Затем осуществляется доступ или извлечение данных, поступающих от датчиков 508, 510, 512 и 514 швартовки (шаг 604). Если обнаружено, что по меньшей мере одно швартовочное устройство закреплено (шаг 606), генерируется предупреждение (шаг 608). При выполнении способа 600 сигналы датчиков непрерывно проверяются до тех, пока датчики не перестанут обнаруживать закрепленные швартовочные устройства, после чего пилот может начать запуск двигателя (попытку взлета) вертолета (шаг 610).
На основании сигналов датчиков швартовки вертолета и данных состояния двигателя вычисляется и генерируется предупреждение. Как описано выше, предупреждением может являться акустическое предупреждение об опасности, отдельный зрительно различимый элемент отображения или дополнительная символика и/или текст, интегрированный в уже существующий дисплей (шаг 608). В некоторых вариантах осуществления способа 600 запуск двигателя не допускается, пока закреплен один или несколько швартовочных узлов.
За счет относительно высокой частоты регенерации в способе 600 обеспечивается относительно незаметное и мгновенное обновление данных и изображения на дисплее вертолета. Частое обновление изображения на дисплее позволяет пилоту или экипажу быть в курсе текущей ситуации и реагировать на нее в реальном времени, что улучшает ситуационную информированность.
Соответственно, предложена система обнаружения пришвартованных летательных аппаратов, которая обнаруживает закрепленные швартовочные устройства, генерирует предупреждения до и во время попытки взлета при наличии по меньшей мере одного закрепленного швартовочного устройства.
Хотя в приведенном подробном описании представлен по меньшей мере один пример осуществления, следует учесть, что существует большое число разновидностей. Например, описанные методы и методики также могут быть реализованы в составе полностью автоматизированной системы наведения и отображения, позволяющей экипажу контролировать и визуализировать выполнение автоматизированных маневров. Следует также учесть, что описанный пример или примеры осуществления не имеют целью ограничение каким-либо образом объема, применимости или конфигурации заявленного изобретения. Напротив, приведенное подробное описание послужит для специалистов в данной области техники удобным планом действий по реализации описанного варианта или вариантов осуществления. Следует учесть, что в функции и расположение элементов могут быть внесены различные изменения в пределах объема формулы изобретения, которая включают эквиваленты, известные и предвидимые на момент подачи настоящей патентной заявки.
Изобретение относится к области авиации, в частности к системам швартовки летательных аппаратов. Способ обнаружения закрепленного швартовочного устройства винтокрылого аппарата включает обнаружение с помощью датчика закрепленного швартовочного устройства, генерирование предупреждения о наличии закрепленного швартовочного устройства. Система содержит первый датчик, связанный со швартовочным устройством, обнаруживающий соединение швартовочного устройства с крепежным элементом, процессор, связанный с датчиком и генерирующий предупреждение об опасности. Обеспечивается информированность экипажа и повышение безопасности. 2 н. и 8 з.п. ф-лы, 6 ил.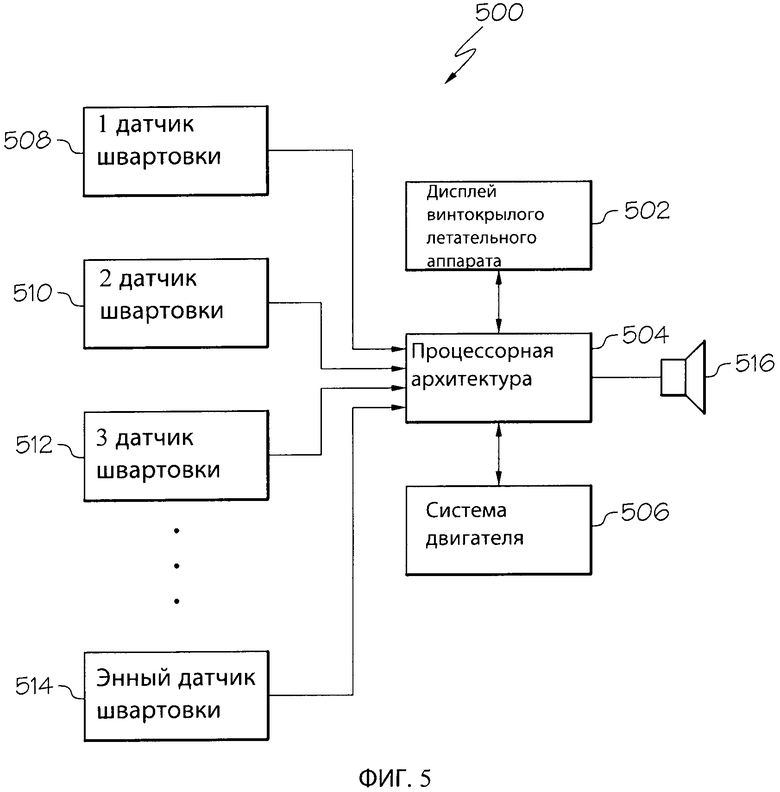
1. Способ обнаружения по меньшей мере одного закрепленного швартовочного устройства винтокрылого летательного аппарата, включающий:
обнаружение с помощью датчика по меньшей мере одного закрепленного швартовочного устройства винтокрылого летательного аппарата, и
генерирование в ответ на обнаружение по меньшей мере одного закрепленного швартовочного устройства винтокрылого летательного аппарата предупреждения о наличии закрепленного швартовочного устройства.
2. Способ по п. 1, в котором шаг генерирования дополнительно включает отображение на дисплее по меньшей мере:
i) зрительно различимого предупреждения о наличии закрепленного швартовочного устройства, и
ii) символики, наглядно представляющей местоположение закрепленного швартовочного устройства.
3. Способ по п. 1, в котором генерирование предупреждения включает передачу акустического предупреждения об опасности.
4. Способ по п. 1, дополнительно включающий предотвращение запуска двигателя винтокрылого летательного аппарата.
5. Способ по п. 1, в котором шаг обнаружения с помощью датчика включает прием сигнала процессором.
6. Способ по п. 5, в котором датчик представляет собой по меньшей мере одно из следующего:
i) датчик давления,
ii) бесконтактный датчик и
iii) датчик проводимости.
7. Система обнаружения по меньшей мере одного закрепленного швартовочного устройства винтокрылого летательного аппарата, содержащая:
первый датчик, связанный по меньшей мере с одним швартовочным устройством винтокрылого летательного аппарата и обнаруживающий, соединено ли швартовочное устройство с крепежным элементом, и
процессор, связанный с первым датчиком и генерирующий предупреждение об опасности, если швартовочное устройство соединено с крепежным элементом.
8. Система по п. 7, дополнительно содержащая дисплей, связанный с процессором и отображающий символику, указывающую, соединено ли швартовочное устройство с крепежным элементом.
9. Система по п. 7, в которой процессор дополнительно связан с системой двигателя с целью предотвращения запуска двигателя, если швартовочное устройство соединено с крепежным элементом.
10. Система по п. 7, в которой первый датчик дополнительно сконфигурирован на обнаружение по меньшей мере одного швартовочного узла, которым винтокрылый летательный аппарат пришвартован к опорной поверхности.
| KR 2015031025 A, 23.03.2015 | |||
| KR 2013136945 A, 13.12.2013 | |||
| RU 2058910 C1, 27.04.1996 | |||
| УСТРОЙСТВО ДЛЯ ШВАРТОВКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2449926C2 |
| US 7513478 B1, 07.04.2009. | |||

