Изобретение относится к оборудованию для приведения в действие глубинно-насосного оборудования и подъема на поверхность жидкости с больших глубин, а именно к балансирный приводам установок штанговых скважинных насосов (УШСН) и направлено на повышение безопасности и обеспечение автоматизации процессов эксплуатации и обслуживания наземного привода УШСН, в частности при проведении текущего и капитального ремонтов скважины.
Из уровня техники известен станок-качалка (RU 2105196, МПК F04B 47/02, опубл. 20.02.1998), содержащий раму, установленную на ней стойку с опорной площадкой, на которой посредством центрального подшипника смонтирован балансир с головкой, и кривошипно-шатунный механизм с приводом. Опорная площадка смонтирована на стойке шарнирно с возможностью поворота, причем ось шарнира параллельна оси центрального подшипника и смещена в горизонтальном направлении относительно нее в сторону кривошипно-шатунного механизма.
К недостаткам известной конструкции устройства относятся низкая устойчивость оборудования наземного привода, громоздкость кинематических пар взаимодействия, отсутствие средств автоматизации процесса обслуживания станка, что в целом снижает надежность оборудования и безопасность работы обслуживающего персонала.
Наиболее близким к заявленному техническому решению и выбранным в качестве прототипа признан станок-качалка (RU 2308614 C2, МПК F04B 47/02, опубл. 20.10.2007), содержащий раму, стойку с шарнирной опорой, на которой установлен балансир с головкой с возможностью его продольного перемещения и кривошипно-шатунный механизм с приводом, при этом шарнирная опора снабжена средством скольжения и механизмом продольного перемещения балансира. Средство скольжения выполнено в виде подпружиненных роликов, упирающихся в опорную плоскость тела балансира, а механизм перемещения балансира выполнен в виде ручного червячно-реечного привода.
Недостатком известного станка является отсутствие в его конструкции узлов, обеспечивающих автоматизацию процесса подготовки привода установки штанговых скважинных насосов к ремонтным работам, так как перемещения балансира, согласно изобретению, производиться вручную с помощью ручного червячно-реечного привода, приводимого в действие одним оператором, находящимся на площадке обслуживания опоры балансира.
Технической задачей, на решение которой направлено заявленное изобретение, является обеспечение автоматизации процесса подготовки привода установки штанговых скважинных насосов к текущим и капитальным ремонтным работам в скважинах.
Указанная задача решена тем, что балансирный привод штанговой насосной установки содержит раму, стойку с лестницей, балансир с траверсой, установленный на шарнирной опоре, шатуны кривошипов с противовесами соединенные с выходным валом редуктора, входной вал которого посредством ременной передачи соединен с валом электродвигателя. Отличает предлагаемый балансирный привод от известных то, что плечо балансира со стороны его головки выполнено в виде телескопической конструкции, состоящей из продольно-подвижной и продольно-неподвижной частей. Продольно-подвижная часть балансира со стороны подвески колонны штанг в скважине состоит из головки жестко связанной с первой и второй выдвижными направляющими секциями и снабжена боковыми элементами упрочнения. Упомянутая головка имеет в своем корпусе продольный вырез, сформированный двумя металлическими пластинами с образованием зазоров под посадку головки на продольно-неподвижную часть плеча балансира. Продольно-неподвижная часть плеча балансира, как и весь балансир, выполнена в виде двутавра, с вырезанным на его вертикальном ребре со стороны подвески колонны штанг в скважину сквозного продольного паза с конечным пазовым расширением. В пазе на оси посредством подшипника установлен подвижно-опорный быстросъемный ролик, концы оси закреплены в первой и второй выдвижных направляющих секциях, а ходовая поверхность ролика сопряжена с внутренней поверхностью паза. На нижней стороне продольно-неподвижной части плеча балансира со стороны подвески колонны штанг установлен подпружиненный механизм опорного вала скольжения с подшипниками и автоматические фиксаторы, на первой выдвижной направляющей секции закреплена многосекционная зубчатая рейка, снабженная конечными датчиками, состоящая в зацеплении с шестерней, установленной на выходном валу реверсивного редукторного электродвигателя, закрепленного на верхней стороне продольно-неподвижной части плеча балансира со стороны подвески колонны штанг на площадке с обеспечением смещения реверсивного двигателя в сторону зацепления шестерни с многосекционной зубчатой рейкой.
Положительным техническим результатом, обеспечиваемым раскрытой совокупностью признаков балансирного привода, является обеспечение автоматизации процесса подготовки привода установки штанговых глубинных насосов к плановым и капитальным ремонтным работам, за счет применения в конструкции устройства плеча балансира выполненного в виде телескопической конструкции, с возможностью продольного движения, снабженного электродвигателем. Дополнительным достигаемым положительным результатом является повышение безопасности ремонтных работ за счет исключения необходимости ручного частичного обслуживания и демонтажа головки балансира.
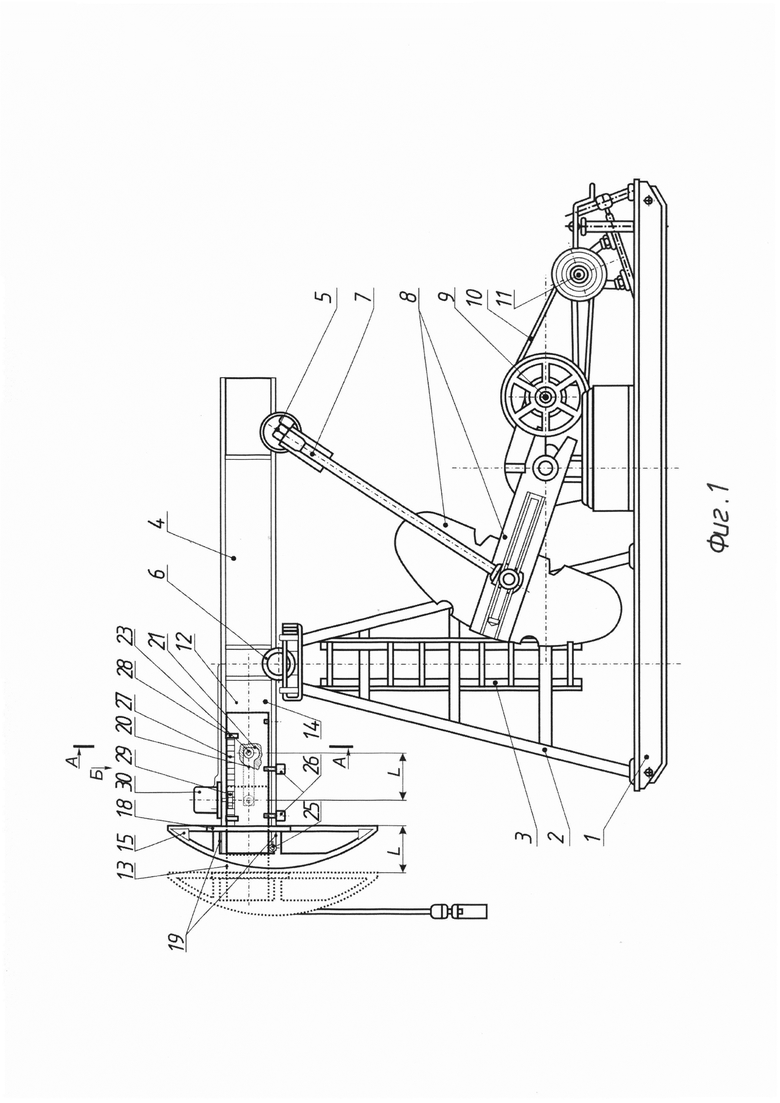
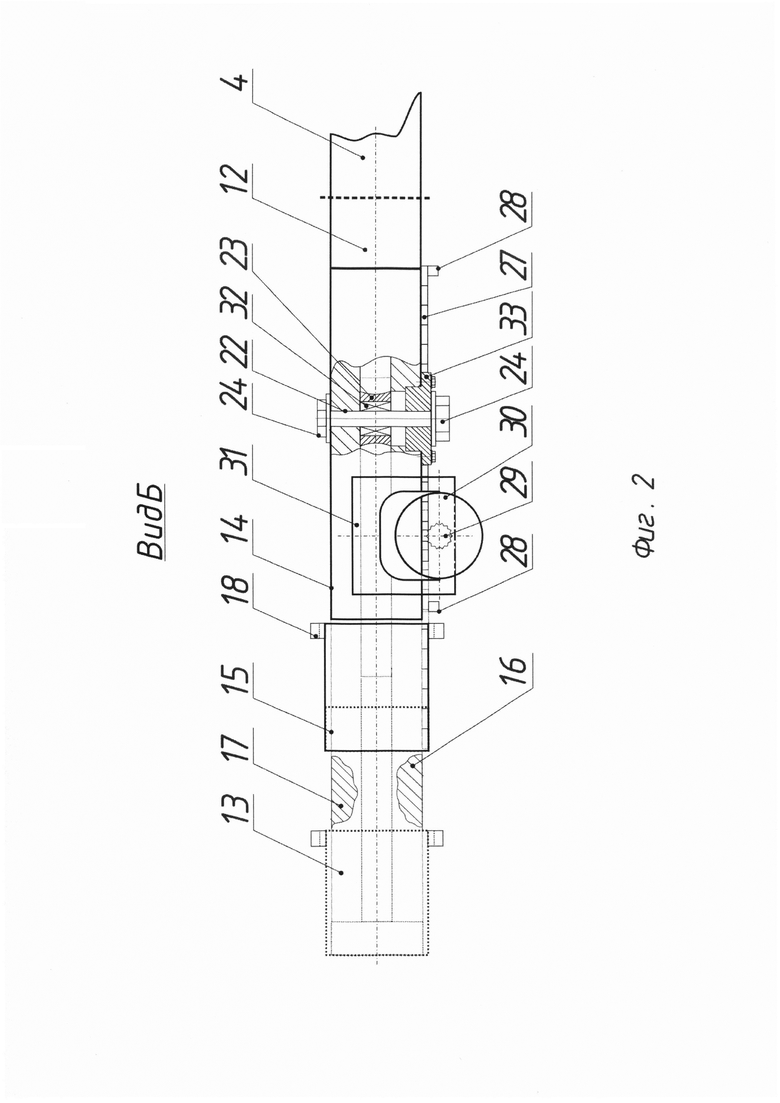
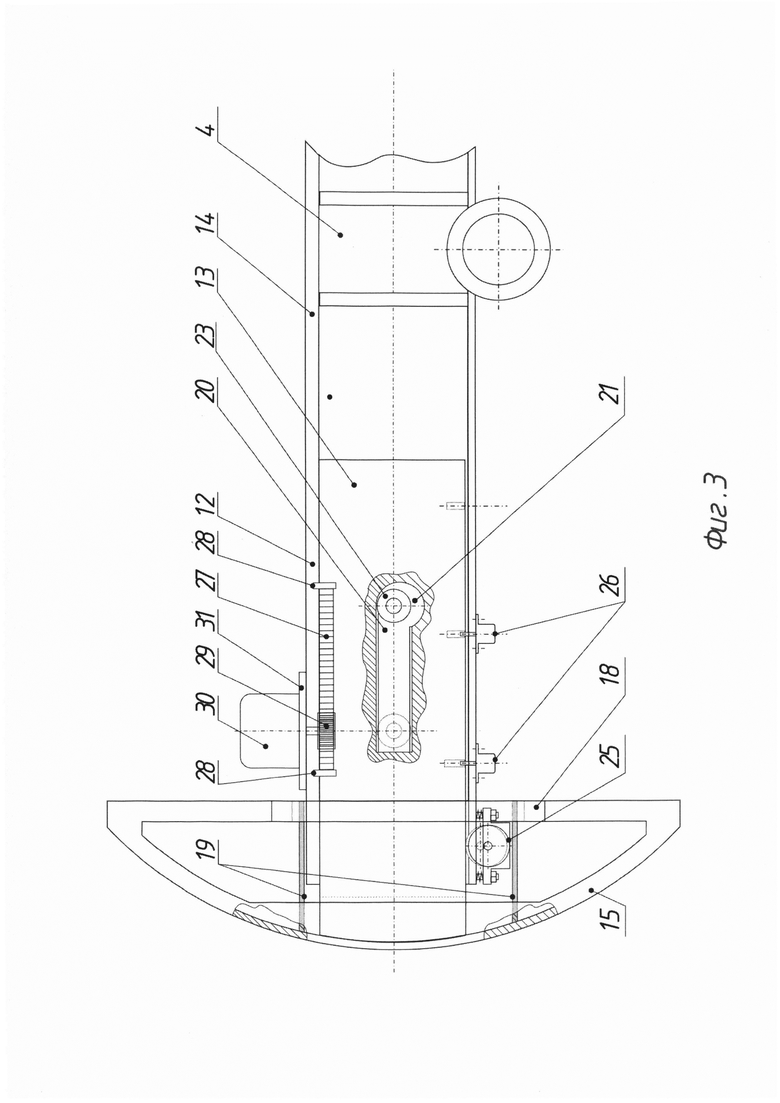
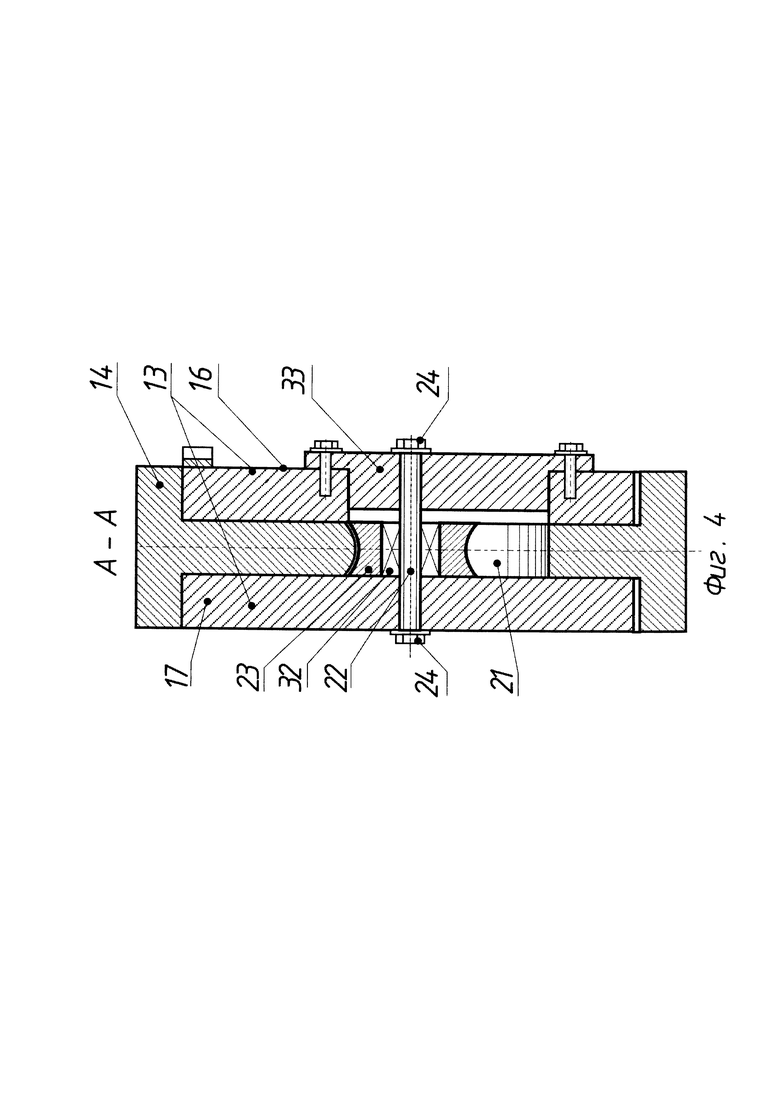
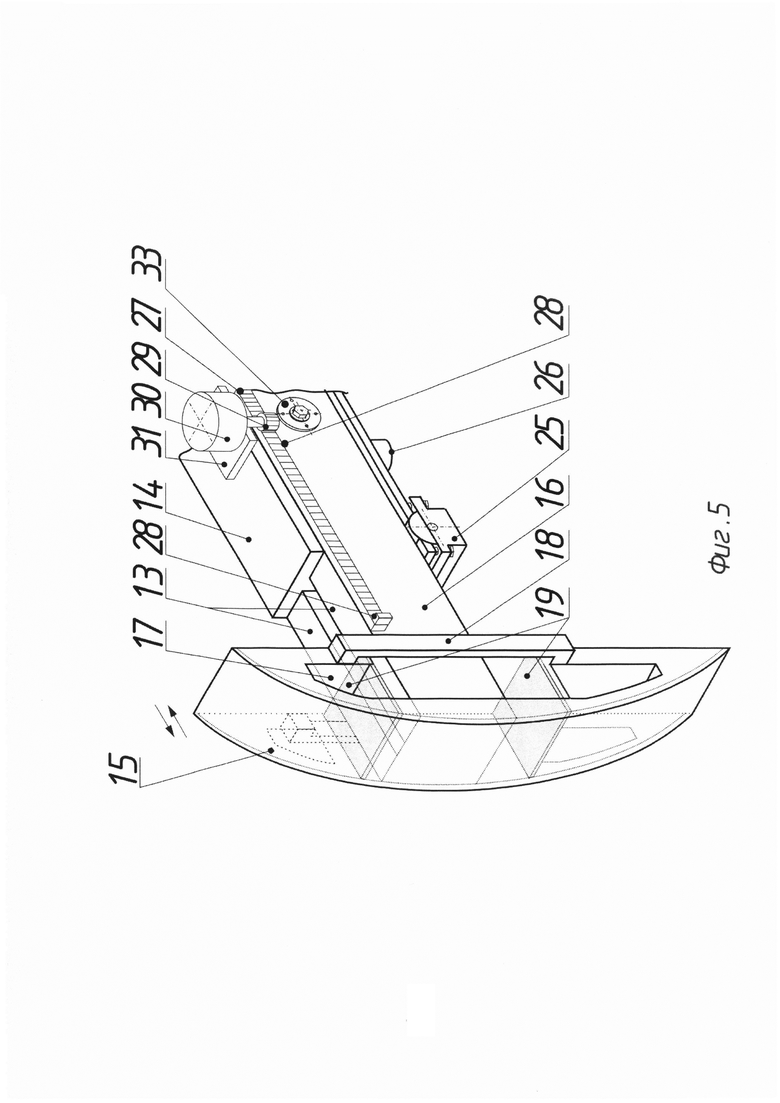
Конструкция балансирного привода штанговой насосной установки поясняется чертежами, где на фиг. 1 приведен общий главный вид устройства; на фиг. 2 приведен местный вид на телескопическую конструкцию балансира со стороны головки по виду Б на фиг. 1; на фиг. 3 показана телескопическая конструкция балансира вид сбоку; на фиг. 4 разрез по А-А на фиг. 1; на фиг. 5 показан способ крепления головки к продольно-подвижной части плеча балансира.
Балансирный привод штанговой насосной установки устроен следующим образом.
Основой устройства является рама 1, стойка 2 с лестницей 3, балансир 4 с траверсой 5, установленный на шарнирной опоре 6, шатуны 7 кривошипов с противовесами 8 соединенных с выходным валом редуктора 9, входной вал которого посредством ременной передачи 10 соединен с валом 11 электродвигателя. Плечо балансира 12 со стороны его головки выполнено в виде телескопической конструкции, состоящей из продольно-подвижной 13 и продольно-неподвижной частей 14. Продольно-подвижная 13 часть балансира 4 со стороны подвески колонны штанг в скважине состоит из головки 15 жестко связанной с первой 16 и второй 17 выдвижными направляющими секциями и снабжена боковыми элементами упрочнения 18. Упомянутая головка имеет в своем корпусе продольный вырез, сформированный двумя металлическими пластинами 19 с образованием зазоров под посадку головки 15 на продольно неподвижную часть плеча балансира 4. Продольно-неподвижная часть 14 плеча балансира, как и весь балансир, выполнена в виде двутавра, с вырезанным на его вертикальном ребре со стороны подвески колонны штанг в скважину сквозного продольного паза 20 с конечным пазовым расширением 21. В пазе на оси 22 посредством подшипника установлен подвижно-опорный быстросъемный ролик 23, при этом концы 24 оси закреплены в первой и второй выдвижных направляющих секциях 16 и 17, при этом его ходовая поверхность сопряжена с внутренней поверхностью паза. На нижней стороне продольно-неподвижной части плеча балансира со стороны подвески колонны штанг установлен подпружиненный механизм 25 опорного вала скольжения с подшипниками и автоматические фиксаторы 26, на первой выдвижной направляющей секции 16 закреплена многосекционная зубчатая рейка 27, снабженная конечными датчиками 28, состоящая в зацеплении с шестерней 29, установленной на выходном валу реверсивного редукторного электродвигателя 30, закрепленного на верхней стороне продольно неподвижной части плеча балансира со стороны подвески колонны штанг на площадке 31 с обеспечением смещения реверсивного электродвигателя в сторону зацепления шестерни с многосекционной зубчатой рейкой 27.
Ходовая поверхность подвижно-опорного быстросъемного ролика в продольном сечении представляет собой вогнутую радиусную поверхность, а внутренняя поверхность сквозного продольного паза представляет радиусную выпуклую поверхность. Конечные датчики могут быть выполнены в виде кнопочных выключателей или электромагнитных сенсоров, а редукторный электродвигатель может быть выполнен асинхронным или шаговым.
Балансирный привод штанговой насосной установки работает следующим образом.
Первоначально, для осуществления текущего или капитального ремонтов скважины, работу балансирного привода останавливают, электродвигатель 11 обесточивают, после чего приводят в действие редукторный электродвигатель 30. В режиме ремонта начало и окончание движения продольно-подвижной части 13 плеча балансира 12 контролируется конечными датчиками 28, при этом включение или отключение электродвигателя 30 осуществляется системой управления (на фигурах условно не показана) по получению сигналов касании шестерни 29 с первым или вторым датчиками 28. При осуществлении передвижения головки 15 балансирным приводом в автоматическом режиме осуществляются действия, описанные ниже.
Жестко закрепленная на продольно-подвижной части 13 плеча балансира 12 головка 15, в результате передвижения продольно-подвижной части 13 вдоль плеча балансира 12 от скважины для образования зоны обслуживания и ремонта у устья скважинного оборудования скважины, своим продольным вырезом 19 сформированным двумя металлическими пластинами, с образованием зазоров под посадку головки 15 на продольно неподвижную часть плеча балансира с участием в процессе элементов упрочнения 18 головки балансира 15, устанавливается и фиксируется на продольно-неподвижной части 14 плеча балансира 12. Передвижение продольно-подвижной части 13, которая состоит из первой 16 и второй 17 выдвижными направляющими секциями с жестко закрепленной головкой 15, производится посредством установленного на площадке 31 на продольно-неподвижной 14 части плеча балансира реверсивного редукторного электродвигателя 30, за счет передачи крутящего момента от шестерни вала 29 на многосекционную зубчатую рейку 27, жестко закрепленную на первой выдвижной направляющей секции 16 продольно-подвижной части 13 плеча балансира 12, обеспечивая возвратно-поступательные движения. В конечных точках передвижения за счет автоматических фиксаторов 26 и конечных датчиков 28 производится фиксация оборудования головки балансира.
Для обеспечения плавности, безопасности и надежности перемещения продольно-подвижной части 13 плеча балансира с головкой 15, вдоль продольно-неподвижной части 14 плеча балансира 12 и, с учетом восприятия значительных нагрузок при работе балансирного привода, передвижение продольно-подвижной части 13 плеча балансира 12 и ее первой 16 и второй 17 выдвижных направляющих секции проводится через подвижный контакт с подвижно-опорным быстросъемным роликом 23 и подшипником 32, насаженным на ось 22 жестко контактирующую своими концами с первой и второй выдвижными направляющими секциями продольно-подвижной части 13 плеча балансира 12 и с помощью ролика передвигаясь по сквозному продольному пазу 20 в ту или иную сторону. Причем на торце продольно неподвижной части 14 плеча балансира 12 со стороны подвески колонных штанг установлен подпружиненный механизм 25 опорного вала скольжения с подшипниками, посредством которого обеспечивается как восприятие вертикальных нагрузок от головки балансира 15, так и обеспечивается плавное перемещение подвижной части 13 плеча балансира 12 с головкой 15 в ту или иную сторону относительно оси скважины.
Таким образом, описанный в настоящей заявке балансирный привод штанговой насосной установки, позволяет решить ряд положительных технических задач, связанных с автоматизацией процесса подготовки скважины к различным видам ремонтов, и повысить безопасность обслуживания привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК-КАЧАЛКА | 2024 |
|
RU2840946C1 |
| СТАНОК-КАЧАЛКА ДЛЯ ДОБЫЧИ НЕФТИ | 2022 |
|
RU2779351C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2721068C1 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2450161C2 |
| ГЛУБИННО-НАСОСНАЯ ШТАНГОВАЯ УСТАНОВКА | 2001 |
|
RU2205979C1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506455C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2715120C1 |
| ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 2012 |
|
RU2488023C1 |
| Скважинная штанговая насосная установка | 2020 |
|
RU2727833C1 |
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
Изобретение относится к оборудованию для автоматизации процессов эксплуатации и обслуживания наземного привода УШСН при проведении текущего и капитального ремонтов скважины. Привод содержит раму, стойку с лестницей, балансир с траверсой, установленный на шарнирной опоре, шатуны, кривошипы с противовесами, соединенные с выходным валом редуктора, входной вал которого посредством ременной передачи соединен с валом электродвигателя. Плечо балансира со стороны его головки выполнено в виде телескопической конструкции, состоящей из продольно-подвижной и продольно-неподвижной частей. Продольно-подвижная часть балансира со стороны подвески колонны штанг в скважине состоит из головки, жестко связанной с первой и второй выдвижными направляющими секциями, и снабжена боковыми элементами упрочнения. На первой выдвижной направляющей секции закреплена многосекционная зубчатая рейка, снабженная конечными датчиками, состоящая в зацеплении с шестерней, установленной на выходном валу реверсивного редукторного электродвигателя, закрепленного на верхней стороне продольно неподвижной части плеча балансира со стороны подвески колонны штанг на площадке с обеспечением смещения реверсивного двигателя в сторону зацепления шестерни с многосекционной зубчатой рейкой. Обеспечивается автоматизация процесса подготовки балансирного привода штанговой насосной установки к текущим и капитальным ремонтным работам. 5 з.п. ф-лы, 5 ил.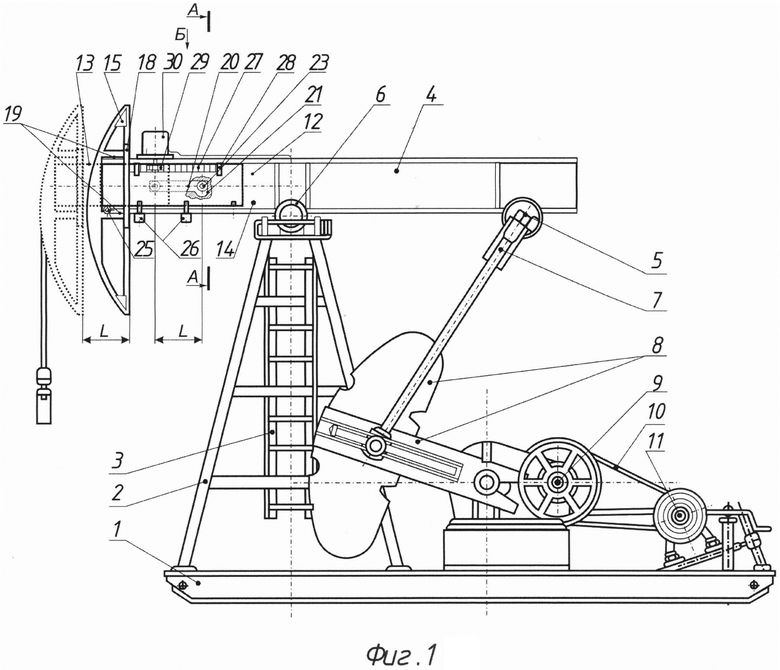
1. Балансирный привод штанговой насосной установки, содержащий раму, стойку с лестницей, балансир с траверсой, установленный на шарнирной опоре, шатуны, кривошипы с противовесами, соединенные с выходным валом редуктора, входной вал которого посредством ременной передачи соединен с валом электродвигателя, отличающийся тем, что плечо балансира со стороны его головки выполнено в виде телескопической конструкции, состоящей из продольно-подвижной и продольно-неподвижной частей; продольно-подвижная часть балансира со стороны подвески колонны штанг в скважине состоит из головки, жестко связанной с первой и второй выдвижными направляющими секциями, и снабжена боковыми элементами упрочнения; упомянутая головка имеет в своем корпусе продольный вырез, сформированный двумя металлическими пластинами с образованием зазоров под посадку головки на продольно-неподвижную часть плеча балансира; продольно-неподвижная часть плеча балансира, как и весь балансир, выполнена в виде двутавра с вырезанным на его вертикальном ребре со стороны подвески колонны штанг в скважину сквозным продольным пазом с конечным пазовым расширением; в пазе на оси посредством подшипника установлен подвижно-опорный быстросъемный ролик, при этом концы оси закреплены в первой и второй выдвижных направляющих секциях, а ходовая поверхность ролика сопряжена с внутренней поверхностью паза; на нижней стороне продольно-неподвижной части плеча балансира со стороны подвески колонны штанг установлен подпружиненный механизм опорного вала скольжения с подшипниками и автоматические фиксаторы, на первой выдвижной направляющей секции закреплена многосекционная зубчатая рейка, снабженная конечными датчиками, состоящая в зацеплении с шестерней, установленной на выходном валу реверсивного редукторного электродвигателя, закрепленного на верхней стороне продольно-неподвижной части плеча балансира со стороны подвески колонны штанг на площадке с обеспечением смещения реверсивного электродвигателя в сторону зацепления шестерни с многосекционной зубчатой рейкой.
2. Балансирный привод по п. 1, отличающийся тем, что ходовая поверхность подвижно-опорного быстросъемного ролика в продольном сечении представляет собой вогнутую радиусную поверхность, а внутренняя поверхность сквозного продольного паза представляет радиусную выпуклую поверхность.
3. Балансирный привод по п. 1, отличающийся тем, что конечные датчики выполнены в виде кнопочных выключателей.
4. Балансирный привод по п. 1, отличающийся тем, что конечные датчики выполнены в виде электромагнитных сенсоров.
5. Балансирный привод по п. 1, отличающийся тем, что редукторный электродвигатель выполнен асинхронным.
6. Балансирный привод по п. 1, отличающийся тем, что редукторный электродвигатель выполнен шаговым.
| СТАНОК-КАЧАЛКА | 2005 |
|
RU2308614C2 |
| Светонаправляющее стекло | 1960 |
|
SU139801A1 |
| ПРИВОД ШТАНГОВЫХ ГЛУБИННЫХ НАСОСОВ | 2015 |
|
RU2614315C1 |
| СТАНОК-КАЧАЛКА (ВАРИАНТЫ) | 1995 |
|
RU2105196C1 |
| US 20180128264 A1, 10.05.2018. | |||

