Изобретение относится к судоподъемной технике, в частности, к системам для подъема затонувших подводных лодок.
Известна система для подъема затонувших подводных лодок, включающая подъемные обухи и обушки для направляющих стропов, установленные на подводной лодке, и подъемное устройство, содержащее скобу, штырь, кожух, в котором размещен подпружиненный винт, взаимодействующий со штырем и гайкой, ползун, обух, установленный на скобе для направляющего троса [1].
Недостатком подъемного устройства являются большие габариты, которые не позволяют разместить его между шпангоутами вокруг обуха.
Известна система для подъема затонувших подводных лодок, включающая подъемные обухи, установленные на подводной лодке, и подъемное устройство, содержащее проушины, соединенные между собой осью, гак с подпружиненной защелкой, соединенный осью с нижней проушиной, судоподъемные скобы, присоединенные к верхней проушине, приспособление для взведения гака и стопорения его во взведенном положении, состоящее из откидной планки, прикрепленной с помощью оси к гаку и перекрывающей отверстие в оконечности гака, подпружиненного рычага, упирающегося в нижний конец планки, и прикрепленногок концу защелкиуправляющего троса, пропущенного через проушины на корпусе гака, и приспособление для закрепления гака в подъемном обухе, выполненное в виде троса-проводника, прикрепленного к оконечности гака и заведенного в отверстие подъемного обуха на затонувшей подводной лодке (авторское свидетельство №1654125) [2].
Подъемное устройство рассмотренной выше системы более компактно и позволяет поместить его между шпангоутами. Однако кинематика движения подъемного устройства во время стыковки, в которой отсутствует четкое положение подъемного устройства относительно обуха, делает процесс стыковки достаточно сложным и трудоемким, особенно при волнении моря.
Задачей изобретения является улучшение условий стыковки подъемного устройства с обухом на подводной лодке.
Задача решается тем, что в известной системе, включающей подъемные обухи, установленные на подводной лодке, и подъемное устройство, содержащее проушины, соединенные между собой осью, гак с подпружиненной защелкой, соединенный осью с нижней проушиной, судоподъемные скобы, присоединенные к верхней проушине, на равном расстоянии от продольной осевой лини подъемных обухов на подводной лодке установлены стыковочные узлы (обушки) для направляющих проводников, а приспособление для взведения гака и стопорения его во взведенном положении выполнено в виде однополюсного магнита с ручкой управления, установленного на нижней проушине и взаимодействующей с ним фиксатором с подкреплением, установленным на гаке.
Новыми отличительными признаками заявляемой системы для подъема затонувших подводных лодок является наличие на корпусе лодки в районе подъемных обухов стыковочных узлов (обушков), установленных на равном расстоянии от продольной осевой лини подъемных обухов, а также выполнение приспособления для взведения гака и стопорения его во взведенном положении в виде однополюсного магнита с ручкой управления, установленного на нижней проушине и взаимодействующей с ним фиксатора с подкреплением, установленным на гаке.
Данные отличительные признаки обеспечивают точное наведение подъемного устройства на обух подводной лодки и его стыковку с обухом, тем самым обеспечивая достижения поставленной цели изобретения.
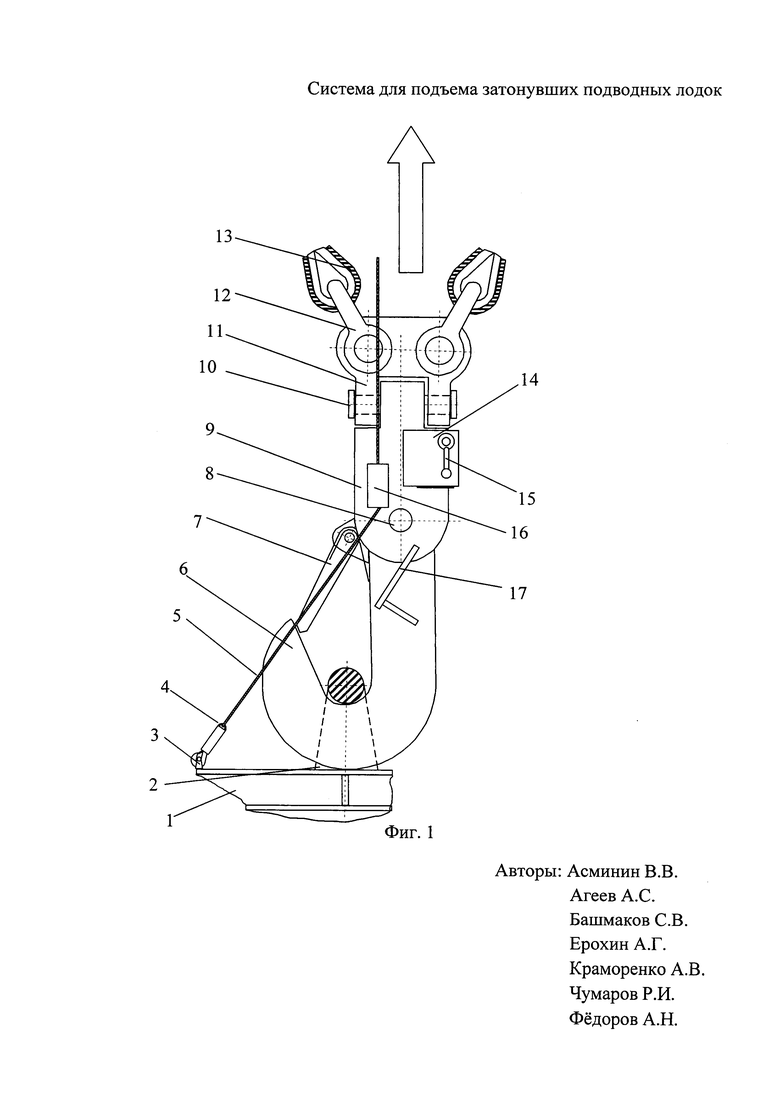
На фиг. 1 показан общий вид системы для подъема затонувших подводных лодок.
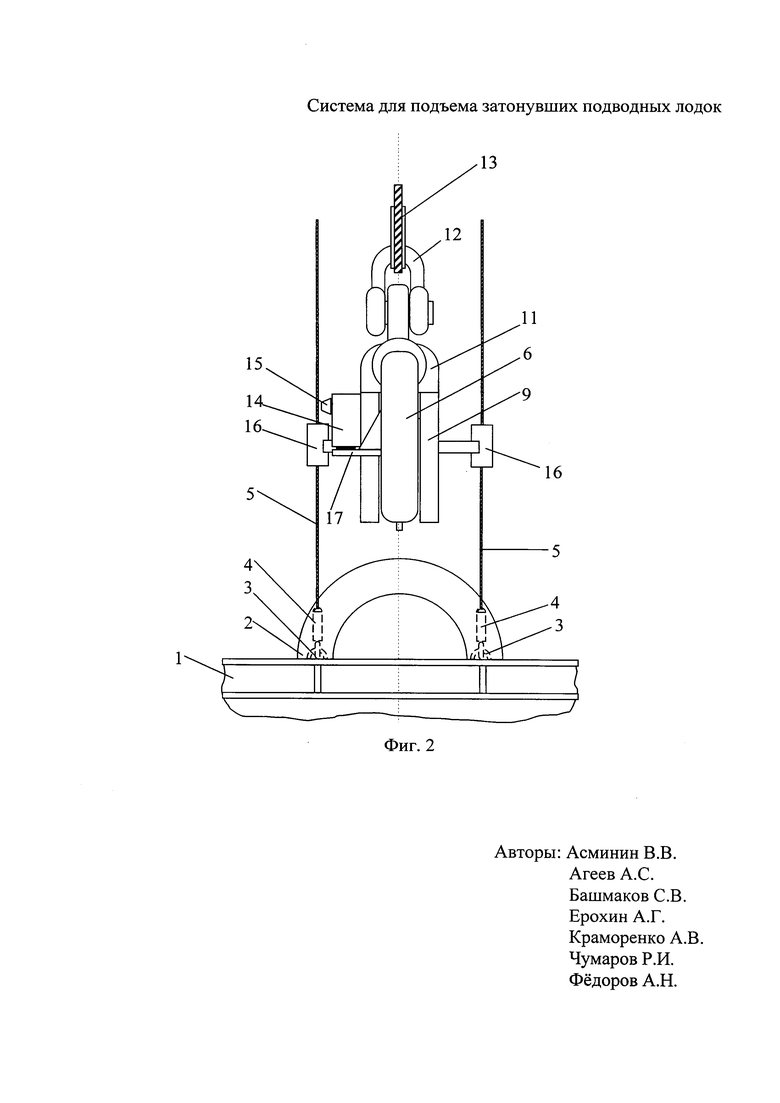
На фиг. 2 показано устройство системы для подъема затонувших подводных лодок на виде с боку.
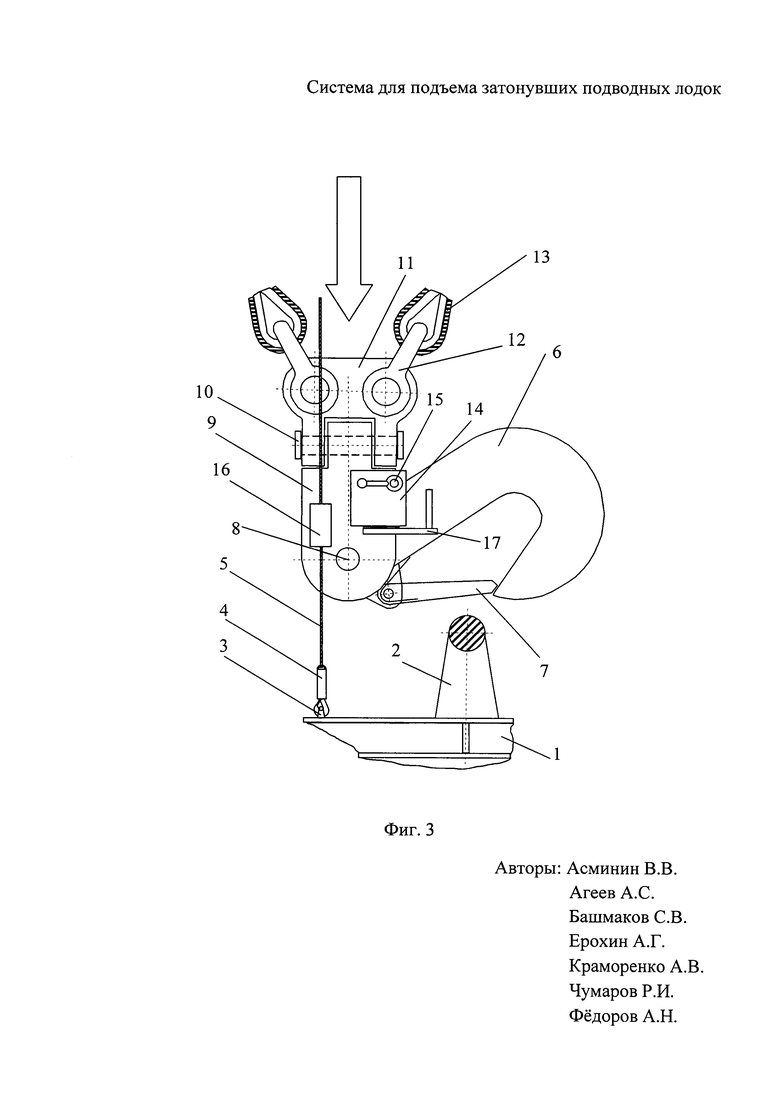
На фиг. 3 показано одевание гака на обух судоподъемный под собственной тяжестью.
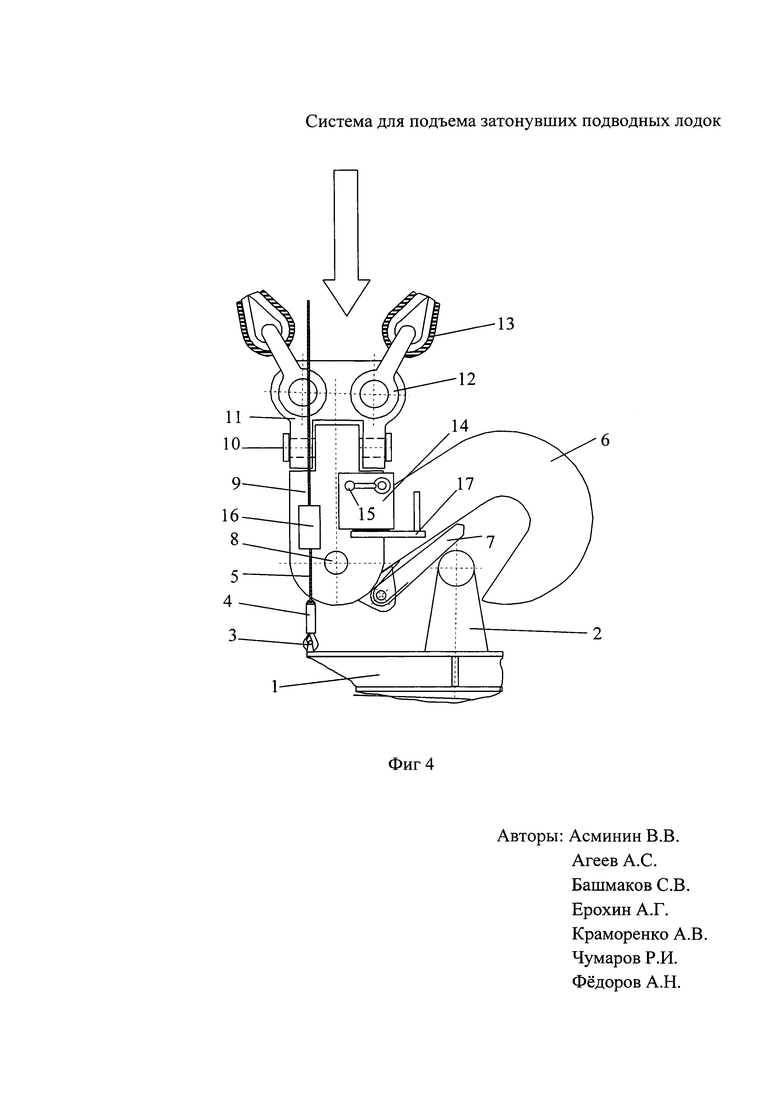
На фиг. 4 показан процесс смещения, фиксации и освобождения гака отключением магнита после снятия натяжения в направляющих проводниках.
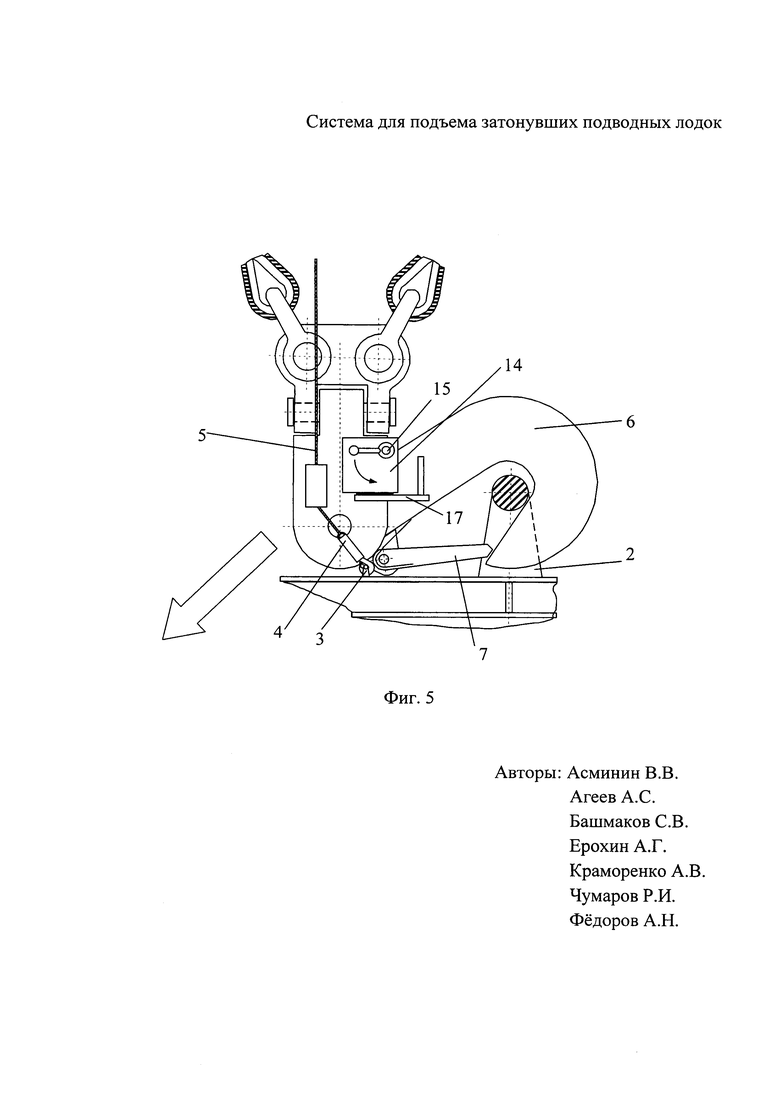
На фиг. 5 показан перевод гака в рабочее положение приложением вертикальной нагрузки.
Система для подъема затонувших подводных лодок включает установленные на корпусе 1 подводной лодки подъемные обухи 2 и стыковочные узлы (обушки) 3, к которым с помощью вертлюга 4 присоединен направляющий проводник 5, и подъемные устройства. Каждое подъемное устройство системы состоит из гака 6 с защелкой 7. Гак 6 с помощью оси 8 состыкован с нижней проушиной 9, которая в свою очередь связана осью 10 с верхней проушиной 11. На проушине 11 установлены судоподъемные скобы 12 с подъемными стропами 13. На нижней проушине 9 установлены магнит 14 с рукояткой управления 15 и клюзы 16, через которые пропущены направляющие проводники 5. На теле гака 6 установлен фиксатор 17, который при наведении подъемного устройства на подъемный обух 2 взаимодействует с магнитом 14.
Система для подъема затонувших подводных лодок работает следующим образом.
На затонувшей подводной лодке выполняются работы по обеспечению доступа к подъемным обухам 2 и стыковочным узлам (обушкам) 3, после чего к последним доставляются оборудованные вертлюгами 4 направляющие проводники 5, которые водолазы или необитаемые телеуправляемые подводные аппараты соединяют со стыковочными узлами (обушками) 3. Одновременно на обеспечивающем судне производят сборку подъемных устройств. После сборки устройств гак 6 в каждом из них поворачивают на 90 градусов до стыковки фиксатора 17 с магнитом 14 и рукояткой управления 15 приводят магнит 14 в действие, в результате чего фиксатор 17 прочно удерживает гак в требуемом положении. Затем направляющие проводники 5 заводят в клюзы 16 и закрепляют их на прочные конструкции вблизи места работ по спуску подъемного устройства к затонувшей подводной лодке. Концы подъемных стропов передают на грузоподъемное устройство обеспечивающего судна и в таком положении начинают спуск подъемного устройства по направляющим проводникам 5 (фиг. 3). Спуск продолжают до тех пор, пока гак не зайдет в подъемный обух 2 (фиг. 4). Затем водолаз или необитаемый телеуправляемый подводный аппарат своим манипулятором поворотом рукоятки 15 освобождают фиксатор 17 от магнита 14, после чего гак 6 под своей тяжестью при одновременном приподнимании подъемного устройства полностью заходит в подъемный обух и закрепляется в нем с помощью защелки 7. Аналогично выполняются работы по установке других подъемных устройств на всех подъемных обухах, имеющихся на затонувшей подводной лодке. После ее остропки грузоподъемными устройствами обеспечивающего судна затонувшую подводную лодку поднимают на поверхность.
Технико-экономическое преимущество предложенной системы для подъема затонувшей подводной лодки по сравнению с известной системой по авторскому свидетельству №1654125, принятой за прототип, заключается в упрощении технологии остропки и сокращении времени на ее выполнение.
В настоящее время выполняется трехмерное параметрическое моделирование конструкции подъемного устройства системы и технологического процесса его наведения на подъемные обухи подводной лодки.
Источники информации:
1. Грузозахватное устройство типа «Скоба», чертеж АО «ЦКБ МТ «Рубин» №04740-067-84.301
2. Устройство для остропки затонувших судов, авторское свидетельство №1654125
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК | 2018 |
|
RU2707472C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК | 2011 |
|
RU2517387C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК | 2018 |
|
RU2721816C2 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2011 |
|
RU2518683C2 |
| ЗАХВАТ ШТОКОВОГО УСТРОЙСТВА ПОДВОДНОЙ ЛОДКИ | 2019 |
|
RU2733632C2 |
| ЗАХВАТ ШТОКОВОГО УСТРОЙСТВА ПОДВОДНОЙ ЛОДКИ | 2020 |
|
RU2748088C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК | 2006 |
|
RU2330778C2 |
| МЯГКИЙ СУДОПОДЪЕМНЫЙ ПОНТОН | 2014 |
|
RU2602444C2 |
| СУДОПОДЪЕМНЫЙ ТРЕНАЖЕР | 2021 |
|
RU2777286C1 |
| РАЗБОРНЫЙ СУДОПОДЪЕМНЫЙ ПОНТОН | 2011 |
|
RU2483969C1 |
Система включает установленные на подводной лодке подъемные обухи, стыковочные узлы в виде обушков для направляющих проводников, установленные на равном расстоянии от продольной осевой лини подъемных обухов, подъемные устройства, каждое из которых содержит проушины, соединенные между собой осью, гак с подпружиненной защелкой, соединенный осью с нижней проушиной, судоподъемные скобы, присоединенные к верхней проушине, приспособление для взведения гака и стопорения его во взведенном положении, выполненное в виде магнита с ручкой управления, установленного на нижней проушине, и взаимодействующего с ним фиксатора с подкреплением, установленным на гаке. Упрощается технология остропки. 5 ил.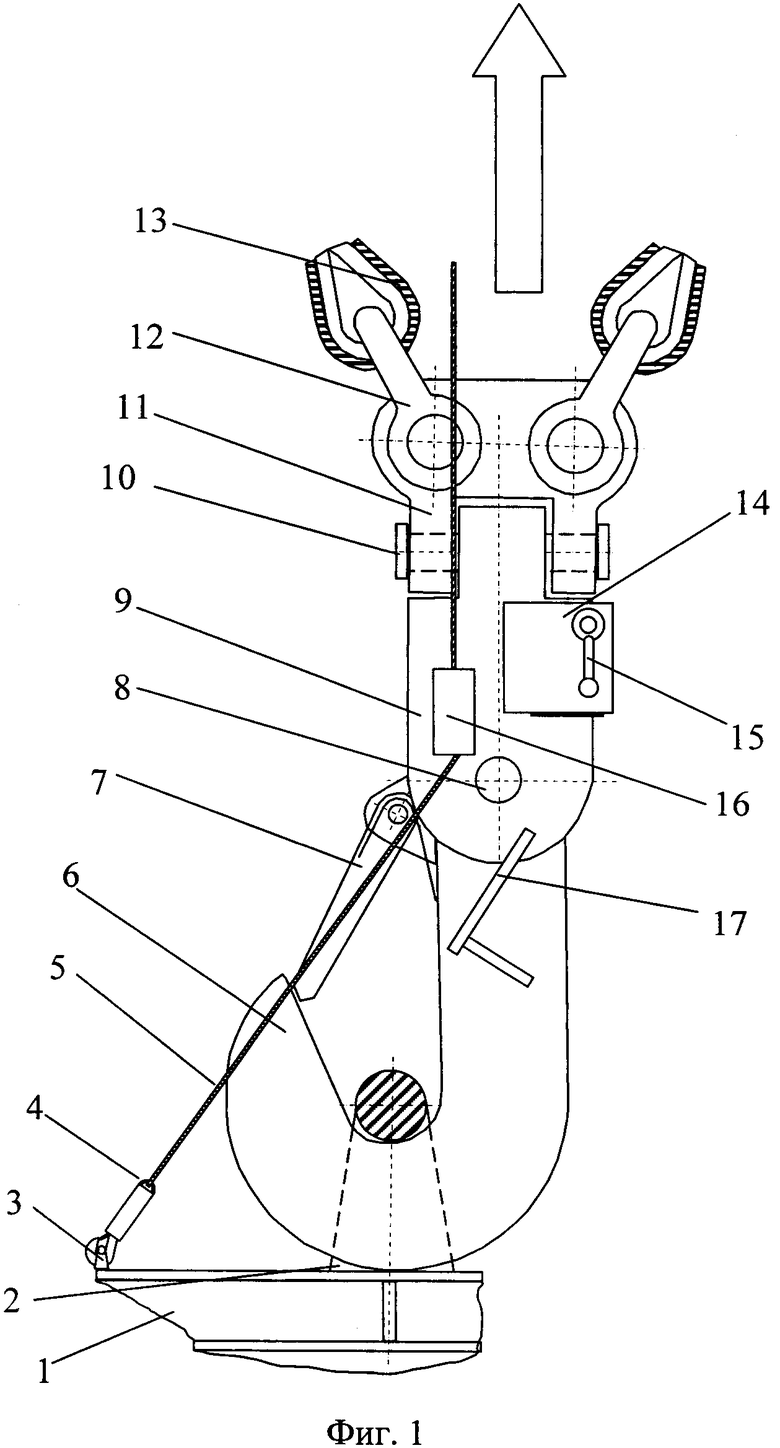
Система для подъема затонувших подводных лодок, включающая подъемные обухи, установленные на подводной лодке, и подъемные устройства, каждое из которых содержит проушины, соединенные между собой осью, гак с подпружиненной защелкой, соединенный осью с нижней проушиной, судоподъемные скобы, присоединенные к верхней проушине, приспособление для взведения гака и стопорения его во взведенном положении, отличающаяся тем, что на подводной лодке на равном расстоянии от продольной осевой линии подъемных обухов установлены стыковочные узлы в виде обушков для направляющих стропов, а приспособление для взведения гака и стопорения его во взведенном положении выполнено в виде магнита с ручкой управления, установленного на нижней проушине, и взаимодействующего с ним фиксатора с подкреплением, установленным на гаке.
| Устройство для остропки затонувших судов | 1989 |
|
SU1654125A2 |
| Устройство для остропки затонувшего судна | 1986 |
|
SU1390128A1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ГЛАУКОМЫ | 2002 |
|
RU2232564C2 |

