Данное изобретение касается устройства для инъекций согласно ограничительной части независимого пункта 1 формулы изобретения.
Устройства для инъекций рассматриваемого здесь рода известны. Они имеют поршень для перемещения пробки в шприце или карпуле, кроме того, держатель для поршня, а также привод для аксиального перемещения держателя поршня. Под аксиальным перемещением здесь понимается, что поршень движется вдоль своей продольной протяженности и при этом вдвигается в шприц или карпулу, чтобы там перемещать по меньшей мере одну пробку. Это устройство имеет, кроме того, управляющее устройство, которое взаимодействует с приводом и предназначено для того, чтобы влиять на скорость поступательного движения поршня, а тем самым и пробки внутри шприца или карпулы. Предпочтительно поршень после установки шприца или карпулы в это устройство для инъекций вплоть до достижения желаемой позиции продвигается с первой скоростью, а после достижения этой позиции, а именно после достижения пробки, останавливается или движется дальше со второй скоростью, которая меньше, чем первая скорость. Было установлено, что такое устройство для инъекций во многих случаях уже сдвигало пробку прежде, чем скорость поступательного движения уменьшится или может снизиться до нуля. Это ведет к тому, что содержащаяся внутри шприца или карпулы субстанция может быть непредумышленно выдавлена. Это может нанести вред пользователю, или же привести к потере дорогостоящей субстанции.
Задача данного изобретения состоит поэтому в том, чтобы создать устройство для инъекций вышеуказанного рода, которое лишено упомянутых недостатков.
Для решения этой задачи предлагается устройство для инъекций, обладающее признаками, приведенными в независимом пункте 1 формулы изобретения. Оно характеризуется тем, что содержит сенсорное устройство, которое определяет относительное положение поршня или по меньшей мере одного его компонента по отношению к держателю. Сенсорное устройство имеет по меньшей мере один сенсорный элемент, взаимодействующий с управляющим устройством. Держатель выполнен с возможностью относительной подвижности по отношению к поршню или по меньшей мере к одному его компоненту. При этом указанное относительное движение происходит против усилия предварительного напряжения, а именно на ограниченном отрезке пути. В то время, когда держатель движется по направлению к пробке в шприце или карпуле, поршень или его компонент может останавливаться пробкой в шприце или карпуле, тогда как держатель продолжает движение. Упирание поршня или компонента в пробку может быть определено с помощью сенсорного элемента уже перед тем, как будут оказываться постоянные усилия поршня или его компонента на указанную по меньшей мере одну пробка внутри шприца или карпулы. Благодаря этому может быть гарантировано, что поршень, даже если он лишь незначительными удерживающими усилиями позиционирован внутри шприца или карпулы, не будет непредвиденным образом перемещаться по устройству для инъекций. Устройство для инъекций характеризуется также тем, что оно рассчитано таким образом, что при активации сенсорного элемента на привод устройства для инъекций оказывается такое воздействие, что скорость поступательного движения поршня по меньшей мере снижается. Благодаря этому гарантируется, что расположенная внутри шприца или карпулы пробка по окончании относительного движения поршня или его компонента по отношению к держателю не будет перемещаться из своего исходного положения непредвиденным образом с высокой скоростью поступательного движения.
Благодаря выбранному здесь варианту выполнения устройства для инъекций обеспечивается, таким образом, что при его применении сначала держатель вместе с поршнем или его компонентом перемещается по направлению к указанной по меньшей мере одной пробке шприца или карпулы. При касании указанной по меньшей мере одной пробки поршень или его компонент остаются стоять, тогда как держатель продолжает движение. Благодаря этому получается относительное движение между держателем и поршнем или его компонентом, которое улавливается сенсорным элементом. Во время этого относительного движения скорость поступательного движения держателя может быть по меньшей мере снижена до желаемого значения или даже до нуля.
В одном предпочтительном примере осуществления устройства для инъекций предусмотрено, что сенсорный элемент содержит микровыключатель. Ему требуется очень небольшое конструктивное пространство, так что устройство для инъекций может быть реализовано компактным. Кроме того, такого рода выключатели очень надежны в эксплуатации.
В одном особенно предпочтительном примере осуществления устройства для инъекций предусматривается, что поршень содержит основное тело, а указанный компонент выполнен с возможностью смещения относительно него. Компонент может быть выполнен очень легким, так что вследствие его очень небольшой инерционной массы может происходить очень быстрое перемещение, время срабатывания устройства для инъекций получается очень коротким, а действующие на пробку силы во время этого относительного движения очень малы.
Другие варианты выполнения и преимущества устройства для инъекций вытекают из зависимых пунктов формулы изобретения.
Данное изобретение поясняется в дальнейшем более подробно с привлечением чертежей. На них показано следующее:
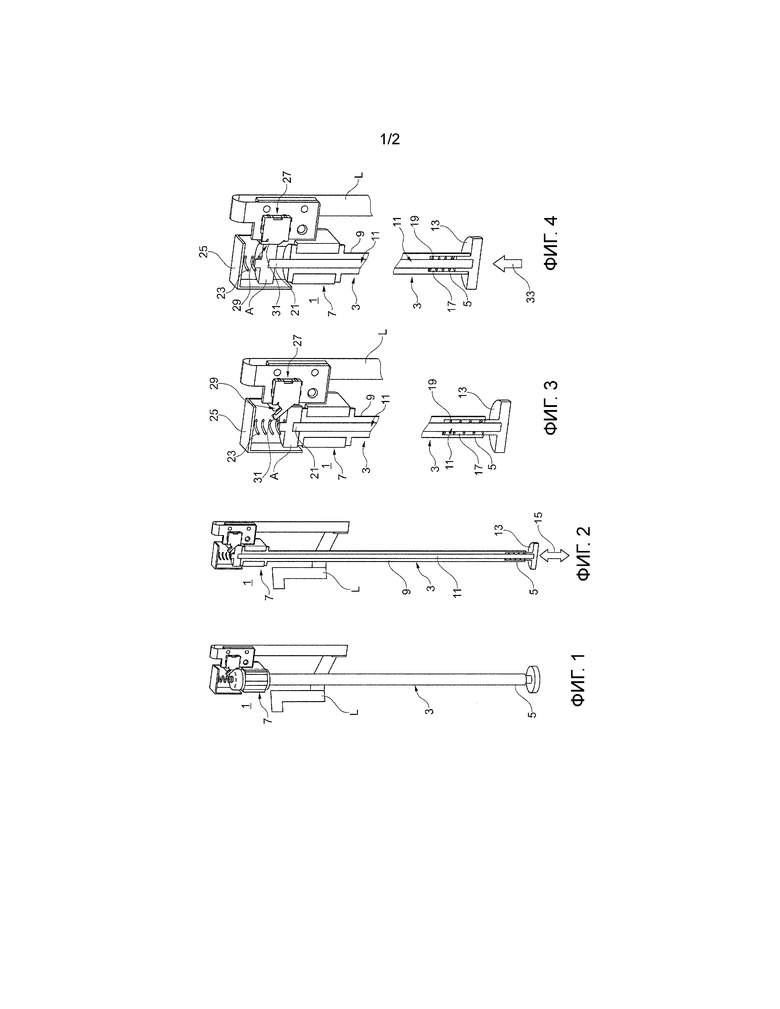
Фиг. 1 в перспективе вид спереди части устройства для инъекций согласно первому примеру выполнения;
Фиг. 2 продольное сечение частей устройства для инъекций по Фиг. 1;
Фиг. 3 увеличенное изображение держателя с выключателем устройства для инъекций по Фиг. 1 и 2 в первом коммутационном положении;
Фиг. 4 увеличенное изображение представленного на Фиг. 3 выключателя во втором коммутационном положении;
Фиг. 5 видоизмененный пример выполнения частей устройства для инъекций в продольном сечении;
Фиг. 6 увеличенное изображение держателя с выключателем устройства для инъекций по Фиг. 5 в первом коммутационном положении; и
Фиг. 7 увеличенное изображение выключателя по Фиг. 6 во втором коммутационном положении.
На Фиг. 1 представлены части устройства 1 для инъекций согласно первому примеру выполнения, однако не полностью, а именно показан поршень 3, который служит для того, чтобы своим на Фиг. 1 нижним концом перемещать пробку, находящуюся в не показанном здесь шприце или карпуле, либо для того, чтобы вывести медикамент и ввести пациенту, или для того, чтобы находящиеся в двухкамерной карпуле субстанции смешать друг с другом для получения готового к введению медикамента. Поршень 3 помещен на держатель 7, который установлен внутри устройства 1 для инъекций с возможностью перемещения в направлении продольной протяженности поршня 3 вдоль не представленной здесь направляющей шины или подобного элемента. В качестве примера здесь на Фиг. 1 исходят из того, что держатель 7 находится в верхнем исходном положении и перемещается вниз для того, чтобы переместить пробку.
На Фиг. 2 показаны в продольном сечении элементы устройства 1 для инъекций по Фиг. 1. Одинаковые части снабжены одинаковыми ссылочными позициями, так что при необходимости можно обратиться к описанию Фиг. 1. На этом сечении можно видеть, что поршень 3 в этом примере выполнения имеет основное тело 9 и один компонент 11, установленный с возможностью смещения относительно основного тела, при этом указанное основное тело 9 выполнено в виде полого цилиндра, имеющего внутреннее пространство, в котором расположен с возможностью смещения компонент 11, выполненный здесь как толкатель. Основное тело 9 зафиксировано по положению, т.е. соединено с держателем 7 неподвижно относительно продольной протяженности поршня 3. Таким образом, держатель 7 движется вверх и вниз, с ним движется поршень 3, а, тем самым, и его основное тело 9 движется синхронно с держателем 7 вверх и вниз.
На Фиг. 2 видно, что толкатель, т.е. компонент 11, выступает наружу за нижний конец 5 основного тела 9 и здесь, на своем нижнем конце имеет пластину 13, которая прилегает к подлежащей перемещению пробке, когда держатель 7 вместе с поршнем 3 по двойной стрелке 15 движется вниз внутрь шприца или карпулы.
Движение держателя 7 вверх требуется, в частности, тогда, когда содержавшийся в шприце или карпуле медикамент был полностью выпущен, и в устройство для инъекций должны быть вставлены новые шприц или карпула. Как правило, после каждой инъекции нагрузка на пробку снимается, поскольку держатель 7 с поршневым штоком 3 перемещается немного назад, т.е. вверх.
На Фиг. 3 показаны в увеличенном масштабе, с одной стороны, область держателя 7 устройства 1 для инъекций и, с другой стороны, нижний конец 5 поршня 3 с пластиной 13, помещенной на выполненный в виде толкателя компонент 11. Одинаковые части обозначены одинаковыми ссылочными позициями, так что при необходимости следует обратиться к предыдущим фигурам и их описаниям.
На этом увеличенном изображении нижнего конца 5 поршня 3 видно, что его основное тело 9, во-первых, имеет внутреннее пространство для приема второго компонента 11, т.е. толкателя, и, во-вторых, увеличенную область 17, которая служит для приема элемента 19 предварительного напряжения, выполненного в виде винтовой пружины. Она опирается на верхний край области 17 и, во-вторых, на пластину 13 с предварительным натягом, так что она удерживается на максимальном расстоянии от нижнего конца 5 поршня 3, причем на компонент 11, таким образом, действует сила, на Фиг. 3 направленная вниз. Подходящим образом предотвращается выдвижение второго компонента 11 вниз из основного тела 9 под действием элемента 19 предварительного напряжения. В представленном здесь варианте осуществления на верхнем конце 21 компонента 11 предусмотрен упор A, который здесь в качестве примера выполнен кольцевым и такого размера, что он не может быть перемещен через внутреннее пространство основного тела 9 вниз. Упор A опирается на верхнюю сторону держателя 7, так что элемент 19 предварительного напряжения может выдавливать второй компонент 11 с пластиной 13 вниз только по определенному пути.
На верхний конец 21 компонента 11 действует упругий элемент 23, который здесь в качестве примера тоже выполнен как винтовая пружина, и с предварительным натягом с одной стороны опирается на верхний конец 21, а с другой стороны - на контропору 25 держателя 7. За счет этого предварительного натяга упругого элемента 23 второй компонент 11 - так же, как и посредством элемента 19 предварительного напряжения - отжимается вниз по отношению к жестко соединенному с держателем 7 основному телу 9 поршня 3.
При соответствующих расчетах можно отказаться от элемента 19 предварительного напряжения. Соответственно, можно предусмотреть только элемент 19 предварительного напряжения, а не упругий элемент 23.
Устройство 1 для инъекций содержит также сенсорное устройство 27, имеющее сенсорный элемент 29, который здесь имеет микровыключатель и включающий рычажок 31, лежащий на пути движения верхнего конца 21 второго компонента 11. Он расположен таким образом, что из своего показанного на Фиг. 3 исходного положения или, соответственно, из первого коммутационного положения при направленном вверх перемещении второго компонента 11, т.е. толкателя, поворачивается во вторую позицию или, соответственно, второе коммутационное положение.
В принципе можно предусмотреть сенсорное устройство с сенсорным элементом 29 или, соответственно, микровыключателем на верхнем конце 21 второго компонента 11 и обеспечивать взаимодействие указанного включающего рычажка 31 с жестко установленной на держателе 7 контропорой. Предусмотренная здесь конструкция характеризуется, однако, тем, что этот сенсорный элемент 29 помещен на держатель 7 с фиксацией по положению, и его включающий рычажок 31 срабатывает от компонента 11, который выполнен с возможностью относительного движения по отношению к основному телу 9 поршня 3. Поршень 3 за счет этого оказывается более легким.
Из этих разъяснений становится понятно, что, вместо микровыключателя или дополнительно, могут быть использованы другие устройства, например, магнитные ленты, фотоэлектрические датчики или подобные устройства, чтобы детектировать определенную позицию компонента 11 по отношению к держателю 7.
На Фиг. 4 тоже показан в увеличенном масштабе фрагмент устройства 1 для инъекций, а именно верхний конец 21 поршня 3 с держателем 7 и нижний конец 5 поршня 3 с пластиной 13. Одинаковые части снабжены одинаковыми ссылочными позициями, так что при необходимости можно обратиться к описанию предыдущих фигур.
Держатель 7 вместе с поршнем 3 перемещается вниз в шприц или карпулу, пока пластина 13 не натолкнется на пробку в шприце или карпуле, так что он согласно стрелке 33 перемещает пластину 13 против действия предварительного натяга элемента 19 предварительного напряжения по отношению к основному телу 9 поршня 3 вверх. При таком перемещении упругий элемент 23 тоже воздействует на пластину 13. Непосредственно после того, как пластина 13 коснется пробки шприца или карпулы, имеет место описанное относительное движение соединенного с этой пластиной 13 компонента 11 по отношению к основному телу 9 поршня 3, тогда как держатель 7 еще продолжает двигаться по направлению к пробке. Движение вверх пластины 13 и первого компонента 11 под действием показанной стрелкой 33 силы заканчивается тем, что пластина 13 упирается в упор, здесь - на нижнем конце 5 поршня 3, как это показано на Фиг. 4.
На Фиг. 1-4 можно еще увидеть, что электропитание сенсорного устройства 27, а также сенсорного элемента 29 осуществляется через токопроводящую дорожку L, которая выполнена гибкой, так что она может следовать за держателем 7 в то время, когда он вместе с поршнем 3 перемещается внутри устройства 1 для инъекций в направлении продольной протяженности поршня 3.
Токопроводящая дорожка L, с одной стороны, соединена с источником энергопитания, а с другой стороны, она служит для того, чтобы передавать сигналы сенсорного элемента 29, здесь это коммутационные сигналы микровыключателя, на не представленное здесь управляющее устройство, с помощью которого оказывается воздействие на привод, вызывающий движение вверх и вниз держателя 7.
На Фиг. 5 показан видоизмененный вариант выполнения представленных на Фиг. 1 элементов устройства 1 для инъекций. Одинаковые по назначению и устройству части снабжены одинаковыми ссылочными обозначениями.
Изображение на Фиг. 5 соответствует изображению на Фиг. 2: поршень 3 устройства 1 для инъекций, как и держатель 7 показаны в продольном сечении. Поршень 3 здесь выполнен как цельный элемент, т.е. не полый. На своем нижнем конце 5 он несет пластину 13, которая здесь, как и представленном выше примере выполнения, не является обязательно необходимой, но служит для того, чтобы нижний конец 5 хорошо захватывал имеющуюся в шприце или карпуле пробку, например, даже тогда, когда она должна быть снабжена центральным сверленым отверстием.
В отличие от первого примера выполнения сам поршень 3 установлен внутри держателя 7 с возможностью перемещения. Таким образом, он может выполнять в направлении своей продольной протяженности относительное движение внутри держателя 7 и по отношению к нему. Поршень 3 в области своего верхнего конца 21 и ниже держателя 7 снабжен контропорой, здесь - окружным буртиком 35, на который опирается упругий элемент 37, выполненный здесь в виде винтовой пружины, вокруг которой проходит основное тело 9 поршня 3, заходит во внутреннюю часть держателя 7 и опирается на нее. Упругий элемент 37 установлен с предварительным натягом, так что он оказывает направленное вниз усилие на поршень 3. Подходящим образом предотвращается выскальзывание поршня 3 вниз из держателя 7. Здесь в качестве реального примера предпочтительно предусматривается кольцеобразный упор A, который размещен на верхнем конце 21 над держателем 7, так что этот верхний конец 21 не может сместиться вниз сквозь внутреннюю часть держателя 7, даже если упругий элемент 37 создает предварительное напряжение на поршне 3.
Указанный окружной буртик 35 на поршне 3 выполнен таким образом, что, хотя и возможно относительное движение между держателем 7 и поршнем 3, но путь этого движения ограничен. Держатель 7 может перемещаться относительно поршня 3 вниз лишь до тех пор, пока он не упрется в упор, здесь это буртик 35.
В представленном на Фиг. 5 примере выполнения устройства 1 для инъекций тоже предусмотрено сенсорное устройство 27, которое содержит сенсорный элемент 29, который и в этом примере предпочтительно содержит микровыключатель с включающим рычажком 31. Включающий рычажок 31, как и в вышеописанном примере выполнения, установлен на пути движения поршня 3, причем таким образом, что он (включающий рычажок 31) при относительном движении поршня 3 по отношению к держателю 7 отклоняется верхним концом 21 поршня 3 вверх, и таким образом сенсорный элемент 29 срабатывает.
На Фиг. 6 показан держатель 7 и верхний конец 21 поршня 3 устройства 1 для инъекций в увеличенном масштабе в первом рабочем положении. Одинаковые части снабжены одинаковыми ссылочными позициями, так что при необходимости можно обратиться к предыдущему описанию.
На Фиг. 6 можно еще раз увидеть, что упругий элемент 37 с одной стороны опирается внутри держателя 7, а с другой стороны - в контропору поршня 3, которая здесь выполнена как окружной буртик 35. Упругий элемент 37 вследствие своего предварительного натяга прижимает поршень 3 в его самую нижнюю позицию, определяемую упором A на верхнем конце 21 поршня 3. Поршень 3 занимает ее тогда, когда на него снизу не действуют никакие силы. В этом рабочем положении включающий рычажок 31 не срабатывает.
На Фиг. 7 показаны элементы устройства 1 для инъекций, представленные на Фиг. 6, во втором рабочем положении. Одинаковые части снабжены одинаковыми ссылочными позициями, так что при необходимости можно обратиться к предыдущему описанию. В отличие от Фиг. 6 здесь держатель 7, однако, показан не в продольном сечении, а на виде сбоку, как и поршень 3.
Оказалось, что при движении вниз держателя 7, за которым следует поршень 3, последний может врезаться в пробку в шприце или карпуле, так что действующая снизу сила будет действовать на поршень 3, что обозначено стрелкой 33.
Под действием этой силы поршень 3 перемещается по отношению к держателю 7 вверх, а именно против усилия предварительного напряжения упругого элемента 37, который сжимается при относительном движении поршня 3 по отношению к держателю 7. При этом верхний конец 21 поршня 3 вместе с упором A тоже движется вверх, так что включающий рычажок 31 сенсорного элемента 29, который здесь выполнен как микровыключатель, поворачивает сенсорное устройство 27 вверх. Таким образом, рычажок из показанного на Фиг. 6 первого коммутационного положения попадает в показанное на Фиг. 7 второе коммутационное положение. Сенсорный элемент 29 срабатывает, так что соответствующий сигнал по токопроводящей дорожке L подается на не показанное здесь управляющее устройство привода. Понятно, что вместо микровыключателя или дополнительно к нему могут быть использованы и другие устройства, как это было установлено и в связи с пояснениями к Фиг. 3.
Движение поршня 3 вверх по отношению к держателю 7 ограничивается, как уже говорилось выше, а именно за счет того, что буртик 35 снизу упирается в держатель 7.
В дальнейшем будут более подробно рассмотрены функции устройств 1 для инъекций, которые представлены элементами на Фиг. 1-7:
Устройства 1 для инъекций описанного здесь рода предназначены для того, чтобы посредством поршня 3 двигать имеющуюся в шприце или карпуле пробку, а именно и как правило таким образом, что внутренний объем шприца или, соответственно, карпулы уменьшается, и имеющиеся в них субстанции выводятся. Для этого шприц или карпула вставляются в устройство 1 для инъекций и ориентируются таким образом, чтобы они были позиционированы коаксиально поршню 3, так что указанный поршень 3 вдвигается во внутреннюю часть шприца или карпулы и может перемещать пробку.
Устройства 1 для инъекций описанного здесь рода используются и в сочетании с известными двухкамерными карпулами, у которых обычно внутреннее пространство герметично укупорено концевой пробкой, а вторая, так называемая средняя пробка делит это внутреннее пространство на два подпространства, в которых могут содержаться различные медицинские субстанции, и в том числе предназначенная для инъекций вода. В двухкамерных карпулах сначала на определенное расстояние передвигается концевая пробка, причем возникает повышенное давление в подпространстве между этой пробкой и средней пробкой, так что эта средняя пробка движется в том же направлении, что и концевая пробка. В заключение средняя пробка попадает в область байпаса на внутренней поверхности карпулы, так что обе субстанции, находящиеся в упомянутых подпространствах могут смешиваться.
Обычно предусматривается, что поршень 3 устройства 1 для инъекций находится в своем максимально втянутом положении. Благодаря этому шприц или карпула могут быть легко вставлены в устройство 1 для инъекций. Затем поршень 3 вместе с держателем 7 перемещается таким образом, что нижний конец 5 поршня 3 перемещает имеющуюся здесь пластину 13 (если она предусмотрена) по направлению к указанной по меньшей мере одной пробке в шприце или карпуле. Скорость поступательного движения при этом сравнительно велика, чтобы сэкономить время в этой рабочей фазе устройства 1 для инъекций. Обычно предусматривается, что поршень 3, как только он впервые коснется пробки в шприце или карпуле, тут же останавливается или продолжает двигаться со сниженной скоростью. Для этого необходимо уловить момент, в который поршень 3 коснется пробки. На основании технических условий хорошо известно, что обычно даже при немедленном отключении привода держателя 7 последний вместе с поршнем 3 продолжает двигаться в первоначальном направлении и оказывает усилие на пробку. Пробка из-за этого неконтролируемо перемещается. Вследствие этого имеющаяся в шприце или карпуле субстанция может выводиться из них.
В представленных здесь примерах выполнения предусмотрено, что держатель 7 может совершать относительное движение по отношению к поршню 3 или его компоненту 11, как только поршень 3 или указанный компонент 11 останавливаются пробкой. На поршень 3 или, соответственно, на компонент 11 действует усилие предварительного напряжения, которое удерживает их по отношению к держателю 7 в определенной позиции. Усилие предварительного напряжения рассчитывается таким образом, что действующие на пробку силы оказываются не достаточными для того, чтобы перемещать ее.
Если держатель 7 и поршень 3 из своего исходного положения на расстоянии от шприца или карпулы движутся по направлению к пробке, то они оба, т.е. указанный держатель 7 и поршень 3, который может также содержать компонент 11, сначала синхронно вдвигаются в указанный шприц или, соответственно, карпулу. Как только поршень 3 или его компонент 11 входят в соприкосновение с пробкой шприца или карпулы и дальше не движутся, держатель 7 перемещается относительно неподвижного поршня 3, как это пояснялось на Фиг. 5-7, против усилия предварительного напряжения. Аналогичное имеет место в примере осуществления по Фиг. 1-4: там держатель 7 совершает относительное движение по отношению к компоненту 11 поршня 3, который здесь выполнен как толкатель, при прилегании к пробке.
В обоих примерах выполнения компонент 11 поршня 3 или, соответственно, поршень 3 сами остаются неподвижными, как только коснутся пробки. Дальнейшее движение вперед компонента 11 или, соответственно, поршня 3 не происходит даже в том случае, если держатель 7 движется дальше по направлению к пробке, поскольку оказываемое на поршень 3 или на компонент 11 усилие предварительного напряжения рассчитывается настолько небольшим, что оно одно не сможет сдвинуть пробку.
Как только поршень 3 или его компонент 11 при поступательном движении держателя 7 коснутся пробки в шприце или карпуле и остановятся, указанный сенсорный элемент 29, здесь это включающий рычажок 31 микровыключателя, из первого коммутационного положения переместится во второе коммутационное положение, так что коммутационный сигнал будет передан на управляющее устройство, которое взаимодействует с приводом. Посредством этого сигнала привод либо отключается, т.е. двигатель, в частности, электродвигатель немедленно останавливается из-за отключения тока, а при необходимости - путем короткого замыкания. Можно также для максимально быстрого завершения поступательного движения держателя 7 вызвать перемену направления вращения двигателя. Несмотря на инерционную массу держателя 7 и реакционную инертность привода держатель 7 еще не оказывает никакого усилия на пробку внутри шприца или карпулы, поскольку сначала происходит относительное движение держателя 7 по отношению к компоненту 11 или поршню 3, и ими не оказываются никакие силовые воздействия на пробку. Во время этого относительного движения держателя 7 по отношению к компоненту 11 или, соответственно, поршню 3 лишь усилие предварительного напряжения упругого элемента или элемента предварительного напряжения воздействует на соприкасающуюся с пробкой часть, т.е. на поршень 3 или, соответственно, на его компонент 11. Это усилие предварительного напряжения вследствие размеров упругого элемента или, соответственно, элемента предварительного напряжения так мало, что даже очень легко перемещаемая внутри шприца или карпулы пробка, удерживаемая в своем исходном положении лишь силами трения, не может быть перемещена этим усилием предварительного напряжения внутри шприца или карпулы.
Относительное движение держателя 7 по отношению к поршню 3 или, соответственно, его компоненту 11 ведет к тому, что верхний конец 21 поршня 32 или, соответственно, компонента 11 взаимодействует с сенсорным элементом 29. Здесь предусмотрено, что этот верхний конец 21, предпочтительно снабженный упором A, взаимодействует с включающим рычажком 31 выполненного как микровыключатель сенсорного элемента 29. Включающий рычажок 31 из своего первого коммутационного положения, показанного на Фиг. 3 и 6, при набегании поршня 3 или компонента 11 срабатывает и перемещается в свое второе коммутационное положение, которое показано на Фиг. 4 и 7. За счет этого сигнал подается на блок управления и через него на привод устройства для инъекций. Как только это произойдет, привод отключается, и поступательное движение держателя 7 по меньшей мере замедляется или прекращается.
Выше указывалось, что относительное движение между держателем 7 и поршнем 3 или, соответственно, его компонентом возможно на ограниченном отрезке, а именно пока поршень 3 или, соответственно, его компонент 11 не достигнет соответствующего упора. Требуемого для достижения упора времени достаточно для того, чтобы по меньшей мере снизить скорость поступательного движения держателя 7, что желательно. Лишь при достижении упора держатель 7 оказывает усилие на пробку в шприце или карпуле, которое больше, чем усилие предварительного напряжения, действующее на поршень 3, или, соответственно, на его компонент 11.
Может быть так, что пользователь вызывает дальнейшее движение держателя 7 в направлении предшествовавшего движения, чтобы при использовании двухкамерной карпулы сначала вызвать смешивание содержащихся в подпространствах двухкамерной карпулы субстанций, т.е. чтобы приготовить находящийся в карпуле медикамент. Затем пользователь может путем повторной активации привода и поступательного перемещения держателя 7 произвести инъекцию готового медикамента.
В другом примере выполнения устройства для инъекций управляющее устройство привода рассчитано таким образом, что после получения коммутационного сигнала от сенсорного элемента сначала происходит автоматическое дальнейшее поступательное движение держателя 7 или, соответственно, поршня 3 и его компонента 11, предпочтительно на пониженной скорости, чтобы автоматически осуществить приготовление содержащегося в двухкамерной карпуле медикамента. Лишь тогда, когда это произойдет, держатель 7 активируется снова, если этого пожелает пользователь, и устройство 1 для инъекций соответственно активируется.
Как правило, происходит относительно быстрое поступательное движение держателя 7 с поршнем 3 и при необходимости предусмотренным компонентом 11. Как только пробка будет обнаружена, что осуществляется посредством сенсорного элемента 29, поступательное движение держателя 7 сначала прекращается. Во время выполняемого приготовления медикамента в двухкамерной карпуле происходит определенное медленное поступательное движение держателя вместе с поршнем и его компонентом (если он предусмотрен) до тех пор, пока средняя пробка в этой двухкамерной карпуле не попадет в область байпаса. Посредством дальнейшего поступательного движения осуществляется процесс приготовления, при котором имеющиеся в подпространствах этой двухкамерной карпулы субстанции смешиваются и/или активируются. В процессе смешивания или, соответственно, активирования этих субстанций поступательное движение предпочтительно прекращается. После этого привод держателя 7 снова активируют, чтобы вызвать поступательное движение пробки внутри карпулы с помощью поршня 3 или его компонента 11 с желаемой скоростью, чтобы ввести готовый медикамент.
Благодаря возможности относительного движения между держателем 7 и поршнем (Фиг. 5-7) или, соответственно, компонентом 11 поршня 3 (см. Фиг. 1-4) указанное устройство 1 для инъекций в течение первой временной фазы после касания пробки внутри шприца или карпулы еще не оказывает никаких существенных усилий на эту пробку. Усилия, прилагаемые держателем 7, действуют на пробку лишь тогда, когда держатель 7 уже прошел определенный путь по отношению к поршню 3 или его компоненту 11. Требуемое для этого время используется на то, чтобы остановить привод держателя 7 или воздействовать на него таким образом, что держатель 7 будет совершать более медленное, определенное поступательное движение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЪЕКТОР КАРПУЛЬНЫЙ ОДНОРАЗОВЫЙ | 2010 |
|
RU2459639C2 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ЛИОФИЛИЗАЦИИ, РЕКОНСТИТУЦИИ И ВВЕДЕНИЯ РЕКОНСТИТУИРОВАННОГО ДЕЙСТВУЮЩЕГО ВЕЩЕСТВА | 2005 |
|
RU2384349C2 |
| Карпульный инъектор | 2019 |
|
RU2721823C1 |
| ОДНОРАЗОВОЕ УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЛЕКАРСТВЕННОГО ПРЕПАРАТА "АЭРС" | 2005 |
|
RU2289427C1 |
| СТОМАТОЛОГИЧЕСКИЙ ШПРИЦ | 1994 |
|
RU2060736C1 |
| ОДНОРАЗОВЫЙ ДВУХКАМЕРНЫЙ ШПРИЦ | 2013 |
|
RU2531650C2 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО, В ЧАСТНОСТИ ШПРИЦ-РУЧКА, ДЛЯ ОДНОВРЕМЕННОГО ВВЕДЕНИЯ НЕСКОЛЬКИХ ЛЕКАРСТВЕННЫХ ПРЕПАРАТОВ | 2017 |
|
RU2764869C2 |
| КАРПУЛЬНЫЙ ОДНОРАЗОВЫЙ ШПРИЦ-ИНЪЕКТОР | 2015 |
|
RU2613602C9 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2008 |
|
RU2470678C2 |
| УСТРОЙСТВО ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2016 |
|
RU2719917C2 |
Изобретение относится к медицинской технике, а именно к устройствам для инъекций. Устройство для инъекций содержит поршень для перемещения пробки в шприце или карпуле, держатель для поршня, привод для аксиального перемещения держателя поршня, связанное с приводом управляющее устройство. Причем держатель установлен по отношению к поршню или его компоненту с возможностью относительного перемещения на ограниченном отрезке пути с преодолением усилия предварительного напряжения. Причем предусмотрено сенсорное устройство, которое детектирует относительное положение поршня или по меньшей мере одного его компонента по отношению к держателю и которое содержит по меньшей мере один сенсорный элемент, взаимодействующий с управляющим устройством. При этом указанное управляющее устройство рассчитано таким образом, что при активации сенсорного элемента скорость поступательного движения держателя поршня по меньшей мере снижается. Причем поршень содержит основное тело, и указанный компонент выполнен с возможностью смещения относительно него. Причем основное тело поршня выполнено в виде полого цилиндра, имеющего внутреннее пространство, и в этом внутреннем пространстве с возможностью перемещения расположен компонент, выполненный в виде толкателя. 7 з.п. ф-лы, 7 ил.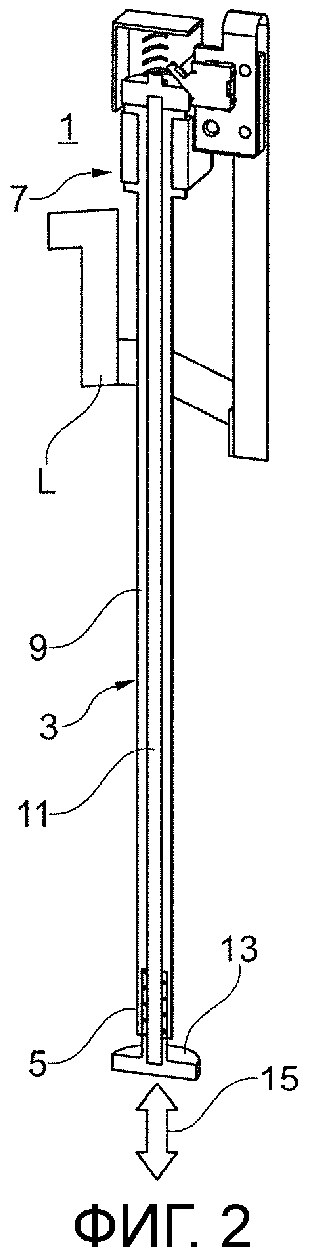
1. Устройство (1) для инъекций, содержащее:
- поршень (3) для перемещения пробки в шприце или карпуле,
- держатель (7) для поршня (3),
- привод для аксиального перемещения держателя (7) поршня (3),
- связанное с приводом управляющее устройство, причем
- держатель (7) установлен по отношению к поршню (3) или его компоненту (11) с возможностью относительного перемещения на ограниченном отрезке пути с преодолением усилия предварительного напряжения, причем
- предусмотрено сенсорное устройство (27), которое детектирует относительное положение поршня (3) или по меньшей мере одного его компонента (11) по отношению к держателю (7)
- и которое содержит по меньшей мере один сенсорный элемент (29), взаимодействующий с управляющим устройством, отличающееся тем, что
- указанное управляющее устройство рассчитано таким образом, что при активации сенсорного элемента (29) скорость поступательного движения держателя (7) поршня (3) по меньшей мере снижается, причем
- поршень (3) содержит основное тело (9), и указанный компонент (11) выполнен с возможностью смещения относительно него, и причем
- основное тело (9) поршня (3) выполнено в виде полого цилиндра, имеющего внутреннее пространство, и в этом внутреннем пространстве с возможностью перемещения расположен компонент (11), выполненный в виде толкателя.
2. Устройство (1) для инъекций по п. 1, отличающееся тем, что сенсорный элемент (29) содержит микровыключатель.
3. Устройство (1) для инъекций по п. 2, отличающееся тем, что микровыключатель выполнен с возможностью приведения в действие поршнем (3) или его компонентом (11).
4. Устройство (1) для инъекций по п. 3, отличающееся тем, что микровыключатель выполнен с возможностью срабатывания при достижении поршнем (3) или его компонентом (11) определенного относительного положения по отношению к держателю (7).
5. Устройство (1) для инъекций по любому из предыдущих пунктов, отличающееся тем, что держатель (7) содержит упругий элемент (19, 23, 37), который в первом рабочем положении оказывает давление на поршень (3) или на указанный по меньшей мере один компонент (11).
6. Устройство (1) для инъекций по п. 5, отличающееся тем, что поршень (3) размещен на держателе (7) таким образом, что он или его компонент (11) при соприкосновении с пробкой в шприце или карпуле против силы упругого элемента перемещается из первого рабочего положения.
7. Устройство (1) для инъекций по любому из предыдущих пунктов, отличающееся тем, что управляющее устройство рассчитано таким образом, что при активации сенсорного элемента (29) привод устройства для инъекций останавливается, а тем самым останавливается и держатель (7) поршня (3).
8. Устройство (1) для инъекций по любому из предыдущих пунктов, отличающееся тем, что управляющее устройство рассчитано таким образом, что при активации сенсорного элемента (29) поступательное движение держателя (7) поршня (3) прекращается, а затем продолжается на пониженной скорости.
| US 2003158524 A1, 21.08.2003 | |||
| US 2015080790 A1, 19.03.2015 | |||
| US 2013085452 A1, 04.04.2013 | |||
| RU 2007114761 A, 27.11.2008. |

