Изобретение относится к области моделирования сложных организационно-технических систем и может быть использовано при проектировании систем автоматизированного контроля систем связи.
Толкование терминов, используемых в заявке.
Под мониторингом понимается наблюдение, оценка и прогноз состояния окружающей среды в связи с хозяйственной деятельностью человека (Ермишян А.Г. Теоретические основы построения систем военной связи в объединениях и соединениях: Учебник. Часть 1. Методологические основы построения организационно-технических систем военной связи. СПб.: ВАС, 2005. - 740 с., стр. 359).
Под системой управления понимается организационно-техническая система, имеющая орган управления, объект управления, прямую и обратную информационную связь между ними (средство управления) и предназначенная для формирования с определенным качеством управляющие воздействия на объект управления исходя из сложившейся обстановки и информации, поступающей от этого объекта (Ермишян А.Г. Теоретические основы построения систем военной связи в объединениях и соединениях: Учебник. Часть 1. Методологические основы построения организационно-технических систем военной связи. СПб.: ВАС, 2005. - 740 с., стр. 48, 71).
Под системой связи понимается организационно-техническое объединение средств связи, развернутых в соответствии с решаемыми задачами и принятой системой управления для обмена всеми видами сообщений (информации) между пунктами (узлами связи), органами и объектами управления (Ермишян А.Г. Теоретические основы построения систем военной связи в объединениях и соединениях: Учебник. Часть 1. Методологические основы построения организационно-технических систем военной связи. СПб.: ВАС, 2005. - 740 с., стр. 74).
Под объектом контроля понимается изделие и (или) их составные части, подлежащие (подвергаемые) диагностированию (контролю) (ГОСТ 20911-89. Техническая диагностика. Термины и определения. - М.: Издательство стандартов, 1989. - 9 с., стр. 2).
Под деструктивными воздействиями понимаются: типовые дистанционные несанкционированные воздействия, в качестве которых выступают: «отказ в обслуживании», DOS-атаки, эхо-тестирование адресов, фальсификация адреса и др. (Шаньгин В.Ф. «Защита компьютерной информации. Эффективные методы и средства». - М.: ДМК Пресс, 2008., стр. 28-29).
Известен способ мониторинга, реализованный в изобретении «Способ мониторинга цифровых систем передачи и устройство его реализующее», патент РФ №2573266, G06F 11/00, опубликованное 17.12.20145, бюл. №2. Способ заключается в том, что формируют базу данных эталонных значений n-параметров i-го объекта контроля, измеряют параметры i-го объекта контроля в момент времени t1, прогнозируют техническое состояние i-го объекта контроля на заданный интервал времени 


Наиболее близким по своей технической сущности и выполняемым функциям аналогом-прототипом к заявленному, является способ мониторинга, реализованный в изобретении РФ «Способ мониторинга распределенной системы управления и связи», патент РФ №2619205, G06F 11/26, опубликованный 12.05.2017, бюл. №14.
Способ-прототип заключается в том что: формируют структуру и топологию системы мониторинга, определяют эталонные значения норм всех n-параметров i-х объектов контроля с учетом: количества i-х объектов контроля, расстояния между i-ми объектами контроля, скорости передачи информации между i-ми объектами контроля, периодичности и продолжительности контроля технического состояния i-х объектов контроля, формируют базу данных эталонных значений всех n-параметров i-х объектов контроля, измеряют n-параметров i-х объектов контроля, определяют техническое состояние i-х объектов контроля на заданный момент времени t1 и интервал времени 
Технической проблемой в данной области является низкая достоверность оценки моделируемых процессов из-за отсутствия имитации: определения количества, периодичности и продолжительности внешних деструктивных воздействий на i-й объект контроля k-го уровня управления, определения действительных значений n-параметров i-х объектов контроля k-го уровня управления в момент времени t с учетом внешних деструктивных воздействий, определения отклонений эталонных значений n-параметров i-х объектов контроля k-го уровня управления, выбора i-го объекта контроля k-го уровня управления для проведения мониторинга, n-параметров которых не соответствуют эталонным значениям, определения существующего и необходимого ресурса для проведения мониторинга i-го объекта контроля k-го уровня управления, n-параметров которых не соответствуют эталонным значениям.
Техническая проблема решается созданием способа моделирования процесса мониторинга многоуровневых систем управления с распределенными элементами систем связи, обеспечивающего возможность повысить достоверность оценки моделируемых процессов за счет имитации: определения количества, периодичности и продолжительности внешних деструктивных воздействий на i-й объект контроля k-го уровня управления, определения действительных значений n-параметров i-х объектов контроля k-го уровня управления в момент времени t с учетом внешних деструктивных воздействий, определения отклонений эталонных значений n-параметров i-х объектов контроля k-го уровня управления, выбора i-го объекта контроля k-го уровня управления для проведения мониторинга, n-параметров которых не соответствуют эталонным значениям, определения существующего и необходимого ресурса для проведения мониторинга i-го объекта контроля k-го уровня управления, n-параметров которых не соответствуют эталонным значениям.
Техническая проблема решается тем, что способ моделирования процесса мониторинга многоуровневых систем управления с распределенными элементами систем связи заключающийся в том, что моделируют структуру и топологию системы мониторинга, моделируют определение эталонных значений норм всех n-параметров i-х объектов контроля k-го уровня управления с учетом: количества i-х объектов контроля k-го уровня управления, расстояния между i-ми объектами контроля k-го уровня управления, скорости передачи информации между i-ми объектами контроля k-го уровня управления, периодичности и продолжительности контроля технического состояния i-х объектов контроля k-го уровня управления, моделируют формирование базы данных эталонных значений норм всех n-параметров i-х объектов контроля k-го уровня управления, измеряют n-параметров i-х объектов контроля k-го уровня управления, моделируют определение технического состояния i-х объектов контроля k-го уровня управления, моделируют изменение и реконфигурацию системы мониторинга с учетом технического состояния i-х объектов контроля k-го уровня управления, согласно изобретению дополнен следующими действиями: моделируют определение количества, периодичности и продолжительности внешних деструктивных воздействий на i-й объект контроля k-го уровня управления, моделируют определение действительных значений n-параметров i-х объектов контроля k-го уровня управления в момент времени t с учетом внешних деструктивных воздействий, моделируют определение отклонений эталонных значений n-параметров i-х объектов контроля k-го уровня управления, моделируют выбор i-х объектов контроля k-го уровня управления для проведения мониторинга, n-параметров которых не соответствуют эталонным значениям, моделируют определение существующего и необходимого ресурса для проведения мониторинга i-го объекта контроля k-го уровня управления, n-параметров которых не соответствуют эталонным значениям, производят остановку процесса моделирования.
Результаты поиска известных решений в данной и смежной областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
«Промышленная применимость» способа обусловлена наличием элементной базы, на основе которой могут быть выполнены устройства, реализующие данный способ.
Заявленный способ поясняется чертежом, на котором показана:
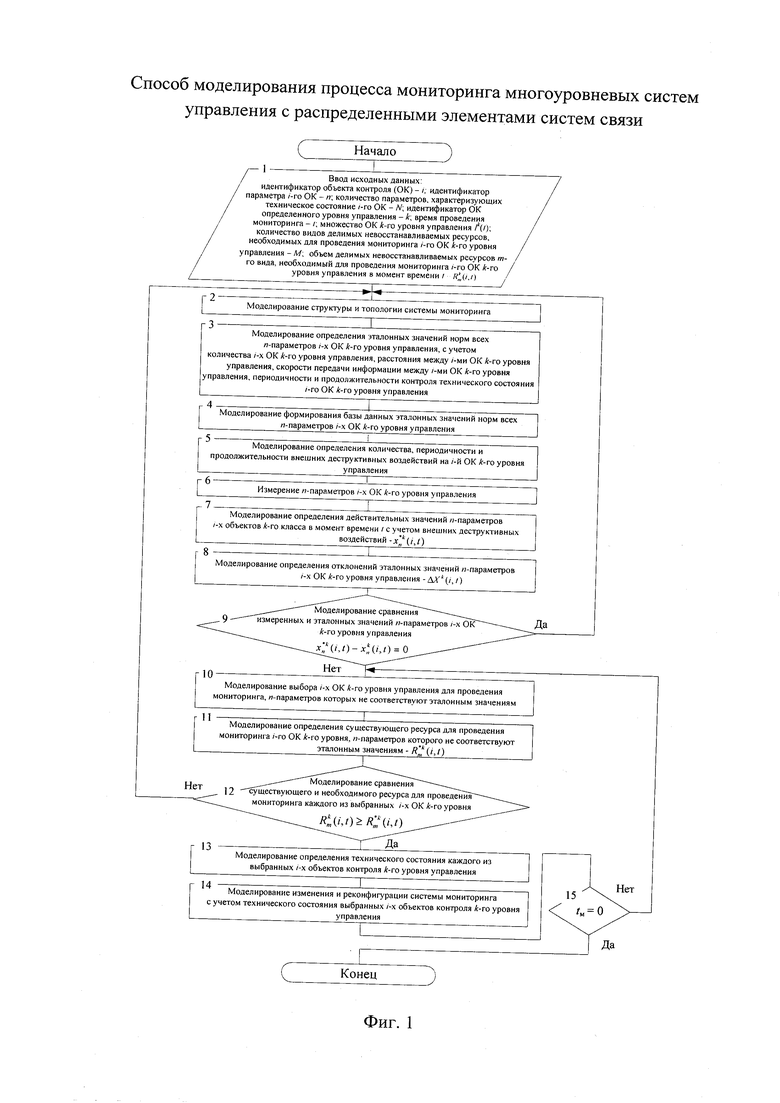
фиг. 1 - схема моделирующего алгоритма процесса мониторинга многоуровневых систем управления с распределенными элементами систем связи.
Реализовать заявленный способ можно в виде моделирующего алгоритма процесса мониторинга многоуровневых систем управления с распределенными элементами систем связи, представленного на фиг. 1.
В блоке 1 задают (вводят) исходные данные, необходимые для моделирования структуры и топологии системы мониторинга: идентификатор объекта контроля (ОК) - i; идентификатор параметра i-го ОК - n; количество параметров, характеризующих техническое состояние i-го ОК - N; идентификатор ОК определенного уровня управления - k; время проведения мониторинга - t; множество ОК k-го уровня управления Ik(t); количество видов делимых невосстанавливаемых ресурсов, необходимых для проведения мониторинга i-го ОК k-го уровня управления - M; объем делимых невосстанавливаемых ресурсов m-го вида, необходимый для проведения мониторинга i-го ОК k-го уровня управления в момент времени t - 
Структурно-топологическое построение системы мониторинга предполагает ее представление количественными показателями через соответствующие параметры, а также описание состава, конфигурации и взаимосвязи отдельных элементов (Основы построения систем и сетей передачи информации. Учебное пособие для вузов / В.В. Ломовицкий, А.И. Михайлов, К.В. Шестак, В.М. Щекотихин; под. ред. В.М. Щекотихина - М.: Горячая линия - Телеком, 2005. - 382 с., стр. 57; В.Д. Боев. Основы моделирования военно-техническим систем. Часть 1. Учебное пособие. - СПб: МВАА, 2016. - 268 с., стр. 238).
В блоке 2 моделируют структуру и топологию системы мониторинга. При этом топология размещения элементов системы мониторинга представлена с учетом нескольких i-х объектов контроля k-го уровня управления. Для каждой группы i-х объектов контроля k-го уровня управления осуществляется генерация координат районов их размещения.
Первую группу составляют i-х объектов контроля k-го уровня управления, местоположения которых ограничены районами нахождения элементов систем управления (пунктов управления k-го уровня управления). Представление их координат обеспечивается с помощью соотношений:


где 






Ко второй группе относятся i-е объекты контроля k-го уровня управления, координаты которых зависят от положения i-х объектов контроля k-го уровня управления первой группы. Имитация их районов размещения осуществляется с помощью выражений:


где 





α - угол, определяющий местоположение i-го объекта контроля k-го уровня управления второй группы относительно i-го объекта контроля k-го уровня управления первой группы.
Третью группу составляют i-е объекты контроля k-го уровня управления, местоположение которых коррелированно с координатами i-го объекта контроля k-го уровня управления второй группы.
N-ую группу составляют i-е объекты контроля k-го уровня управления, местоположение которых коррелированно с координатами i-го объекта контроля k-го уровня управления (N-1)-ой группы. Имитация их районов размещения осуществляется с помощью выражений:


где 





β - угол, определяющий местоположение i-го объекта контроля k-го уровня управления N-ой группы относительно i-го объекта контроля k-го уровня управления (N-1)-ой группы.
Имитация координат размещения i-х объектов контроля k-х уровней управления всех групп осуществляется последовательно от групп с наименьшими номерами к группам с наибольшими номерами в порядке возрастания.
Структура системы мониторинга могжет быть смоделирована с помощью имитаторов формальных математических моделей каналов связи, основанных на аппарате системных функций (Галкин А. П. и др. Моделирование каналов систем связи. - М.: Связь, 1979. - 96 с., стр. 40-52).
В блоке 3 моделируют определение эталонных значений норм всех n-параметров i-х объектов контроля k-го уровня управления с учетом: количества i-х объектов контроля k-го уровня управления, расстояния между i-ми объектами контроля k-го уровня управления, скорости передачи информации между i-ми объектами контроля k-го уровня управления, периодичности и продолжительности контроля технического состояния i-х объектов контроля k-го уровня управления. Последовательность расчетов при определении значений норм всех n-параметров i-х объектов контроля с учетом реальных условий их эксплуатации представлен в известной литературе (И.Г. Бакланов Методы измерений в системах связи. М.: Эко-Трендз, 1999. - 204 с. стр. 56).
В блоке 4 моделируют формирование базы данных эталонных значений норм всех n-параметров i-х объектов контроля k-го уровня управления, измеряют n-параметров i-х объектов контроля k-го уровня управления. При этом, вектор базы данных эталонных значений норм определяют с помощью следующего выражения:

где 
Порядок обработки информации и формирования базы данных в системах управления с использованием средств автоматизации (ЭВМ) описан в книгах: (Б.Д. Лебедев, Н.И. Мякин Вопросы автоматизации управления боевыми действиями артиллерии. - М.: Военное издательство МО СССР, 1979. - 158 с, стр. 34-41; Д.А. Иванов, В.П. Савельев. Основы управления войсками в бою. М.: Военное издательство Министерства Обороны СССР,1977. - 391 с., стр. 176-191).
В блоке 5 моделируют определение количества, периодичности и продолжительности внешних деструктивных воздействий. Объектами воздействия являются i-е объекты контроля k-го уровня. (Меньшаков Ю.К. «Защита информации от технических средств разведки». - М.: Российский государственный гуманитарный университет, 2002., стр. 18-19).
В блоке 6 измеряют n-параметров i-х объектов контроля k-го уровня управления. Измерение производится путем сбора, накопления и уточнения статистических данных n-параметров i-х объектов контроля k-го уровня управления с использованием контрольно-измерительной аппаратуры технического контроля (Меньшаков Ю.К. Защита объектов и информации от технических средств разведки. - М.: Российск. гос. гуманит. ун-т, 2002. - 399 с., стр. 385-387; И.Г. Бакланов Тестирование и диагностика систем связи. - М.: Эко-Трендз, 2001. - 264 с., стр. 19-21).
В блоке 7 моделируют определение действительных значений n-параметров i-х объектов контроля k-го уровня управления в момент времени t с учетом внешних деструктивных воздействий. При этом, вектор действительных значений n-параметров i-х объектов контроля k-го уровня управления в момент времени t, определяют с помощью выражения:

где 
В блоке 8 моделируют определение отклонений эталонных значений n-параметров i-х объектов контроля k-го уровня управления. При этом, вектор несовпадения компонент векторов (1) и (2) определяют с помощью выражения:

где 

В блоке 9 моделируют сравнение измеренных и эталонных значений n-параметров i-х объектов контроля k-го уровня управления. Если эталонные значения об i-м объекте контроля k-го уровня управления содержит только действительные сведения о его параметрах, то (3) является «нулевым» вектором и осуществляется возврат к блоку 2, где происходит моделирование структуры и топологии системы мониторинга, исходя из предъявляемых к ней требований. Если же вектор (3) содержит ненулевые компоненты, то осуществляется переход к блоку 10.
В блоке 10 моделируют выбор i-х объектов контроля k-го уровня управления для проведения мониторинга, n-параметров которых не соответствуют эталонным значениям. При этом, выбор осуществляют из множества 

и абсолютно неидеален, если в выбранном для контроля множестве i-х объектов контроля k-го уровня управления нет ни одного i-го объекта контроля k-го уровня с признаками внешнего деструктивного воздействия:
Все реальные результаты выбора лежат в промежутке между идеальными и неидеальными, то есть для них имеет место соотношение:

Подмножество 






Эффект выбора определяют соотношением:

Вследствие различия затрат ресурсов на выявление различных отклонений n-параметров i-х объектов контроля (эталонных значений компонент вектора (1)) от измеренных (компонент вектора(2)), снижение эффекта зависит от того какие объекты исключаются из множества 
В блоке 11 моделируют определение существующего ресурса для проведения мониторинга. При этом, вектор существующего объема делимых невосстанавливаемых ресурсов m-го вида i-х объектов контроля k-го уровня управления в момент времени t, определяют с помощью выражения:

где 
В блоке 12 моделируют сравнение существующего и необходимого ресурса для проведения мониторинга каждого из выбранных i-го объекта контроля k-го уровня.
В случае, если значение существующего ресурса для проведения мониторинга каждого из выбранных i-го объекта контроля k-го уровня ниже необходимого (требуемого) значения, осуществляется возврат к блоку 2, где происходит моделирование структуры и топологии системы мониторинга, исходя их предъявляемых к ней требований.
Если же значение существующего ресурса соответствует необходимому (требуемому) значению 
В блоке 13 моделируют определение технического состояния каждого из выбранных i-х объектов контроля k-го уровня управления. Техническое состояние выбранных i-х объектов контроля k-го уровня управления проводят путем сравнения измеренных значений n-параметров и требуемых значений n-параметров, характеризующих техническое состояние i-х объектов контроля k-го уровня управления (ГОСТ 27002 - 89 Надежность в технике. Основные понятия. Термины и определения. - М. 1989, - 37 с., стр. 2-3; ГОСТ Р 53111 - 2008 Устойчивость функционирования сети связи общего пользования. Требования и методы проверки. - М. 2008, - 19 с., стр. 2)
В блоке 14 моделируют изменение и реконфигурацию системы мониторинга с учетом технического состояния выбранных i-х объектов контроля k-го уровня управления. Реконфигурация системы мониторинга заключается в изменении ее структуры, топологии, режимов работы (введении в работу резервных каналов (линий) и объектов контроля, восстановлении поврежденных и отказавших объектов контроля, изменении частот передачи, приема, мощности передачи, видов обработки сигналов, маршрутов прохождения каналов (трактов), азимутов антенн, помехозащищенных режимов и т.д). (Основы построения систем и сетей передачи информации. Учебное пособие для вузов / В.В. Ломовицкий, А.И. Михайлов, К.В. Шестак, В.М. Щекотихин; под. ред. В.М. Щекотихина - М.: Горячая линия - Телеком, 2005. - 382 с.)
Далее переходят к блоку 15, где производят остановку процесса моделирования.
Оценка эффективности предлагаемого способа проводилась путем сравнения достоверности оценки полученных результатов при моделировании процессов, реализующих способ-прототип и при моделировании процесса мониторинга для предлагаемого способа.
Из формулы 11.8.6 (Вентцель Е. С., Овчаров Л. А. Теория вероятностей и ее инженерные приложения. - М.: Наука. Гл. ред. физ. - мат.лит. - 1988 г., 480 с., стр. 463):
где 
N - количество моделируемых событий;



N - количество моделируемых событий, причем:
N=k × n,
где k - число материальных действий;
n - число реализаций материальных действий,
определим достоверность результатов моделирования процесса мониторинга разноуровневых систем управления с распределенными элементами систем связи, принимая:
Перейдем от функции Лапласа к ее аргументу (Имитационное моделирование средств и комплексов связи и автоматизации. Иванов Е. В. СПб.: ВАС, 1992, 206 с., стр. 14):
Тогда:
Для случая, когда 







Оценка эффективности заявленного способа:
Таким образом, решается техническая проблема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССА ОБОСНОВАНИЯ ТРЕБОВАНИЙ К СИСТЕМЕ МОНИТОРИНГА РАСПРЕДЕЛЕННЫХ СИСТЕМ СВЯЗИ | 2018 |
|
RU2703339C1 |
| Способ моделирования многоуровневой распределенной информационно-измерительной системы мониторинга и управления транспортной сети связи | 2019 |
|
RU2731358C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИСТЕМЫ МОНИТОРИНГА ДЛЯ СИСТЕМ ВОЕННОЙ СВЯЗИ | 2019 |
|
RU2714610C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ РАСПРЕДЕЛЕННОЙ СЕТИ СВЯЗИ ВЫШЕСТОЯЩЕЙ СИСТЕМЫ УПРАВЛЕНИЯ С НЕОБХОДИМЫМ УРОВНЕМ НАДЕЖНОСТИ ЕЕ ЭЛЕМЕНТОВ | 2020 |
|
RU2736528C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ РАСПРЕДЕЛЕННЫХ СЕТЕЙ СВЯЗИ РАЗНОУРОВНЕВЫХ СИСТЕМ УПРАВЛЕНИЯ | 2018 |
|
RU2702902C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ И ОЦЕНИВАНИЯ ЭФФЕКТИВНОСТИ КОМПЛЕКСНОГО ПРИМЕНЕНИЯ РАЗНОРОДНЫХ СИЛ, СРЕДСТВ И РЕСУРСОВ | 2018 |
|
RU2691257C1 |
| Способ моделирования процессов обоснования требуемого уровня живучести распределенных сетей связи вышестоящей системы управления в условиях вскрытия и внешних деструктивных воздействий | 2018 |
|
RU2702503C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ И ОЦЕНИВАНИЯ ЭФФЕКТИВНОСТИ ПРОЦЕССОВ УПРАВЛЕНИЯ И СВЯЗИ | 2018 |
|
RU2673014C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ОБЕСПЕЧЕНИЯ СТРУКТУРНОЙ ЖИВУЧЕСТИ РАСПРЕДЕЛЕННЫХ СЕТЕЙ СВЯЗИ МНОГОУРОВНЕВЫХ СИСТЕМ УПРАВЛЕНИЯ В УСЛОВИЯХ ДЕСТРУКТИВНЫХ ВОЗДЕЙСТВИЙ | 2018 |
|
RU2698407C1 |
| Способ проверки выполнения требований по полноте и оперативности процесса обработки информации системой мониторинга распределенных систем связи | 2024 |
|
RU2837073C1 |
Изобретение относится к области моделирования сложных организационно-технических систем и может быть использовано при проектировании систем автоматизированного контроля систем связи. Технический результат - повышение достоверности оценки моделируемых процессов. Для этого предусмотрена следующая имитация: определение количества, периодичности и продолжительности внешних деструктивных воздействий на i-й объект контроля k-го уровня управления; определение действительных значений n-параметров i-х объектов контроля k-го уровня управления в момент времени t с учетом внешних деструктивных воздействий; определение отклонений эталонных значений n-параметров i-х объектов контроля k-го уровня управления, выбора i-го объекта контроля k-го уровня управления для проведения мониторинга, n-параметров которых не соответствуют эталонным значениям; и определение существующего и необходимого ресурса для проведения мониторинга i-го объекта контроля k-го уровня управления, n-параметров которых не соответствуют эталонным значениям. 1 ил.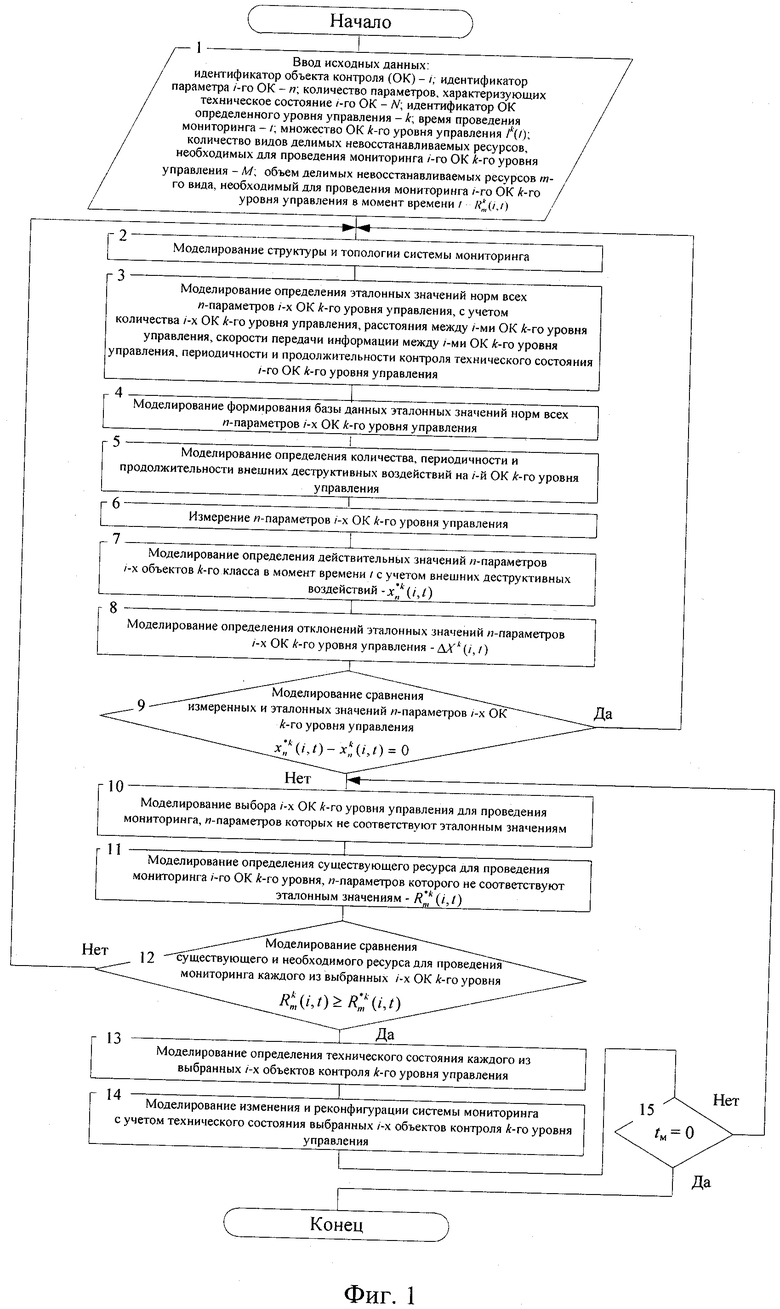
Способ моделирования процесса мониторинга разноуровневых систем управления с распределенными элементами систем связи, заключающийся в том, что моделируют структуру и топологию системы мониторинга, моделируют определение эталонных значений норм всех n-параметров i-х объектов контроля k-го уровня управления с учетом: количества i-х объектов контроля k-го уровня управления, расстояния между i-ми объектами контроля k-го уровня управления, скорости передачи информации между i-ми объектами контроля k-го уровня управления, периодичности и продолжительности контроля технического состояния i-х объектов контроля k-го уровня управления, моделируют формирование базы данных эталонных значений норм всех n-параметров i-х объектов контроля k-го уровня управления, измеряют n-параметров i-х объектов контроля k-го уровня управления, моделируют определение технического состояния i-х объектов контроля k-го уровня управления, моделируют изменение и реконфигурацию системы мониторинга с учетом технического состояния i-х объектов контроля k-го уровня управления, отличающийся тем, что: моделируют определение количества, периодичности и продолжительности внешних деструктивных воздействий на i-й объект контроля k-го уровня управления, моделируют определение действительных значений n-параметров i-х объектов контроля k-го уровня управления в момент времени t с учетом внешних деструктивных воздействий, моделируют определение отклонений эталонных значений n-параметров i-х объектов контроля k-го уровня управления, моделируют выбор i-х объектов контроля k-го уровня управления для проведения мониторинга, n-параметров которых не соответствуют эталонным значениям, моделируют определение существующего и необходимого ресурса для проведения мониторинга i-го объекта контроля k-го уровня управления, n-параметров которых не соответствуют эталонным значениям, производят остановку процесса моделирования.
| СПОСОБ МОНИТОРИНГА РАСПРЕДЕЛЕННОЙ СИСТЕМЫ УПРАВЛЕНИЯ И СВЯЗИ | 2016 |
|
RU2619205C1 |
| Динамометр для измерения мощности | 1939 |
|
SU62720A1 |
| US 7908605 B1, 15.03.2011 | |||
| US 20120316696 A1, 13.12.2012 | |||
| СПОСОБ МОНИТОРИНГА ЦИФРОВЫХ СИСТЕМ ПЕРЕДАЧИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2014 |
|
RU2573266C1 |

