Область техники, к которой относится изобретение
Настоящее изобретение относится к медицинским диагностическим приборам, применяемым в медицине и ветеринарии, таким как видеоэндоскоп, диафаноскоп, приборы для флуоресцентной эндоскопии, ультразвуковой эндоскопии, лазерной эндоскопической хирургии, 3d-эндоскопии и высокочастотной хирургии, и к многокомпонентным диагностическим приборам, один из компонентов которых, контактирующий с биологическими тканями, может быть изготовлен съемным и одноразовым.
Уровень техники
Медицинские диагностические приборы находят широкое применение в медицине и клинической практике для внутриполостной и наружной диагностики. Одним из распространенных видов медицинского диагностического прибора, используемого для неинвазивной диагностики, является видеоэндоскоп. Видеоэндоскоп обычно состоит из жесткой или гибкой эндоскопической насадки, предназначенной для ведения в тело пациента и имеющей на ее дистальном конце видеокамеру или фотоматрицу, рукоятки, служащей для манипулирования эндоскопом со стороны врача, и устройства отображения или монитора, предназначенного для вывода изображения исследуемого участка тела пациента.
Большинство известных видеэндоскопов имеют жесткую конструкцию насадки. Также известны видеэндоскопы с гибкой управляемой насадкой, форма которой может регулироваться с помощью механических средств управления, расположенных в рукоятке видеэндоскопа. При этом большинство указанных насадок выполнены неразъемными. Это приводит к тому, что для обеспечения врачу возможности качественного обзора исследуемой полости в широком диапазоне углов наблюдения необходимо использование нескольких различных видеоэндоскопов, например, имеющих различные углы и направления наблюдения.
Известны также видеоэндоскопические системы, в которых рукоятка эндоскопа объединена с монитором отображения, который соединен кабелем с пультом управления видиоэндоскопической насадкой, которая в свою очередь присоединена к указанному пульту управления неразъемным образом.
Известны технические эндоскопы с аналоговым композитным сигналом, получаемым от видеосенсора. Для соединения насадки с рукояткой указанного эндоскопа используются коаксиальные разъемы типа RCA, а также байонетный разъем типа BNC. По указанным разъемам передается аналоговый сигнал стандартов PAL, SECAM и т.д. Также известны технические эндоскопы с цифровым коаксиальным соединителем с байонетным разъемом для цифрового сигнала SDI (Serial Digital Interface).
Недостатками указанных видеоинтерфейсов являются необходимость оцифровки данных для их сохранения и обработки в виде аналогового композитного сигнала и необходимость использования дополнительных преобразователей для цифрового сигнала SDI для перехода на массовую элементную базу, содержащую чипы, которые имеют интерфейсы для преобразования данных от ведеосенсора. Для указанного преобразования цифрового сигнала SDI нужны дорогостоящие и многокомпонентные решения. Еще одним недостатком всех специализированных интерфейсов, использующих аналоговый композитный сигнал или цифровой сигнал SDI, является узкая область применения, обусловленная передачей одного только видеосигнала. При этом для увеличения количества каналов необходимо увеличение количества контактов, размещаемых на торцевой части насадки технического эндоскопа, что ограничено диаметром самой насадки, который в случае медицинского применения должен очень малым. Также недостатком указанных эндоскопов является невозможность передачи через коаксиальные разъемы больших токов, необходимых для некоторых видов медицинской диагностики.
Из US 9,107,573 известен эндоскоп со съемной насадкой, содержащий рукоятку, гибкую стержнеобразную съемную часть, имеющую дистальный конец и проксимальный конец, соединительный механизм, предназначенный для разъемного соединения рукоятки с проксимальным концом гибкой стержнеобразной съемной части, источник света и электронный видеосенсор, такой как ПЗС-датчик, размещенные на дистальном конце гибкой стержневой съемной части и блок приема изображений, размещенный в гибкой стержневой съемной части, причем соединительный механизм содержит канал электрических сигналов для подачи электропитания на осветительный блок и блок приема изображений, а также канал данных для передачи данных от блока приема изображений. Проксимальная половина гибкой съемной части выполнена утолщенной для вмещения, помимо прочего, средства управления положением дистального конца гибкой стержневой части, а также клапана воздуха и клапана для отсасывания различных жидкостей организма из внутренней части рабочего стержня.
Известный эндоскоп имеет модульную конструкцию, вследствие чего в нем обеспечена возможность сопряжения одной гибкой съемной части со множеством различных рукояток, каждая из которых может иметь собственное предназначение. При этом замена одной рукоятки на другую требует выполнения множества операций, которые не могут быть выполнены одной рукой.
С одной стороны, описанная выше конструкция эндоскопа позволяет производить по отдельности обработку, например дезинфекцию, рукоятки и гибкой съемной части, что упрощает и ускоряет обслуживание эндоскопа. Однако при этом съемная часть является достаточно дорогостоящей, не является одноразовой, и поэтому, наряду с рукояткой, также подлежит стерилизации перед каждым ее использованием.
Кроме того, конструкция такого эндоскопа является громоздкой, а область применения гибкой стержневой съемной части - ограниченной. Еще одним недостатком указанного эндоскопа является размещение области соединения разъемных частей в месте охвата рукоятки ладонью, что снижает надежность такого соединения вследствие воздействия в указанном месте соединения разнонаправленных сил во время осуществления врачом диагностических манипуляций.
Из WO 02055126 A2 известна система для диагностических и хирургических манипуляций in vivo.
Указанная система содержит устройство, выполненное с возможностью диагностики in vivo и содержащее съемную вставляемую часть и рукоятку. Съемная вставляемая часть содержит линзу и датчик для получения информации in vivo. Система содержит также передатчик для передачи принятой информации, расположенный во вставляемой части, и приемник для ее получения, расположенный в рукоятке или в отдельном электронном блоке. Устройство в известной системе может быть также выполнено без видеосенсора и может применяться для осуществления механических воздействий, таких как интубация или отсасывание, например, при желудочных кровотечениях и опорожнении желудка.
В известной системе вставляемая часть может быть также выполнена управляемой посредством размещенных внутри нее проволочных тяг. При этом органы управления дистальным концом вставляемой части расположены в рукоятке, так что для обеспечения управляемости дистальным концом вставляемой части при соединении вставляемой части и рукоятки необходимо обеспечение механического соединения тяг рукоятки и вставляемой части. Для этого в известной системе вставляемую часть и рукоятку вращают в противоположных направлениях, размещая таким образом крючки вставляемой части в петлях тяг рукоятки. Далее с помощью ручки, расположенной на рукоятке и соединенной с резьбовыми элементами, натягивают указанные нити.
К недостаткам указанной системы следует отнести невозможность рассоединения рукоятки и гибкой вставляемой части при произвольном угле изгиба последней, а также необходимость использования отдельного механизма, требующего выполнения дополнительных операций для подготовки вставляемой части к работе. Кроме того, размещение электрических разъемов, используемых для передачи необходимых электрических сигналов между вставляемой частью и рукояткой, на соединительном интерфейсе, расположенном на торцевой поверхности дистального конца рукоятки, повышает вероятность их загрязнения и повреждения.
К существенному преимуществу одноразовых дистальных насадок относится исключение необходимости дезинфекции и стерилизации указанных дистальных насадок, а также диагностического прибора в целом.
Таким образом, несмотря на большое многообразие известных систем, остается насущной задача создания диагностических, в частности, видеоэндоскопических систем со съемными взаимозаменяемыми функциональными насадками с различными характеристиками (длина, диаметр, управляемость дистального конца и др.) для диагностических и хирургических манипуляций, которые бы соединялись с управляющим блоком системы таким образом, чтобы с одной стороны, обеспечивалась бы передача большого количества управляющих сигналов, что обеспечивало бы широкую универсальность системы, а с другой стороны, характеризовались бы возможностью быстрой замены насадки, в том числе «горячей замены» непосредственно во время проведения диагностики без отключения источника питания, одноразовостью, невысокой стоимостью, удовлетворительными требованиями к гигиене и простотой в управлении.
Раскрытие сущности изобретения
Согласно общей концепции настоящего изобретения указанная выше задача решена путем создания медицинского прибора для диагностических и хирургических манипуляций, содержащего съемную дистальную насадку и управляющий блок, причем насадка и блок выполнены разъемными с возможностью передачи большого количества сигналов при компактности и простоте соединения. Благодаря размещению электронных компонентов для управления дистальной насадкой в управляющем блоке, конструкция насадки облегчена, а ее стоимость значительно снижена по сравнению с известными аналогами. Съемную недорогую насадку можно утилизировать после использования, что позволяет избежать дорогостоящих операций стерилизации.
Обеспечение дешевой одноразовой насадки позволяет существенно сократить медицинские расходы и сделать высокотехнологичную диагностику доступной широкому спектру пациентов.
Согласно изобретению, насадка и управляющий блок соединены посредством предложенного авторами настоящего изобретения разъема, конструкция которого с одной стороны, обеспечивает передачу большого количества сигналов, а с другой стороны, обеспечивает быстрое, надежное и простое соединение и разъединение насадки и управляющего блока оператором. Согласно одному из аспектов настоящего изобретения указанная выше задача решена благодаря съемной дистальной насадке для медицинского диагностического прибора, содержащей
трубчатую часть, расположенную на дистальном участке указанной насадки, функциональную головку,
соединительную часть, расположенную на проксимальном участке насадки и выполненную с возможностью разъемного соединения насадки с управляющим блоком медицинского диагностического прибора, причем
соединительная часть содержит по меньшей мере два расположенных в ряд электрических контактных элемента, выполненных с возможностью контакта с ответными контактными элементами управляющего блока при присоединении насадки к управляющему блоку, причем
каждый последующий в продольном направлении насадки контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь соединительной части.
Благодаря такому размещению контактных элементов, при котором каждый последующий в продольном направлении насадки контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь соединительной части, обеспечено наличие зазора между соответствующими контактными элементами насадки и приемного элемента управляющего блока в процессе их соединения, что позволяет избежать трения между контактными элементами, их преждевременного замыкания в процессе соединения насадки и управляющего блока. В свою очередь, это облегчает установку насадки в управляющий блок и их последующее разъединение, увеличивает срок службы многоразового управляющего блока.
Кроме того, такое расположение контактных элементов позволяет увеличить их количество, которое может быть обеспечено при заданной толщине, например, при заданном диаметре, соединительной части. Это обусловлено распределением контактных элементов одновременно в продольном и поперечном направлениях в противоположность их размещению только в одном поперечном сечении или только в продольном направлении. Следует отметить, что на практике может потребоваться размещение на насадке до 40-50 контактных элементов при ограниченном диаметре соединительной части насадки.
Благодаря описанной выше конструкции соединительной части предложенная съемная дистальная насадка для медицинского диагностического прибора обеспечивает достижение технического результата, заключающегося в простоте ее присоединения и отсоединения от управляющего блока диагностического прибора и замены на другую, в том числе с помощью манипуляций одной рукой, поскольку наличие зазора снижает усилие, прикладываемое оператором для соединения/разъединения насадки.
Предложенная конструкция разъема диагностической системы в совокупности с размещением электронных компонентов в управляющем блоке приводит к возможности использования разнообразных по размерам и другим параметрам насадок и созданию диагностических, в частности, эндоскопических систем с недорогими съемными, в том числе, одноразовыми, взаимозаменяемыми функциональными насадками, имеющими различные характеристики, такие как длина, диаметр, управляемость дистального конца насадки и т.д. для диагностических и хирургических манипуляций, характеризующихся широкой универсальностью. -
Указанное расположение контактных элементов соединительной части насадки позволяет разместить большое количество контактных элементов и обеспечить передачу через них необходимого количества электрических и информационных сигналов между насадкой и управляющим блоком диагностического медицинского прибора, достаточного, в том числе, для передачи сигналов изображения высокого разрешения, при сохранении компактности насадки.
Согласно одному из вариантов реализации изобретения, функциональная головка содержит источник излучения большей мощности и/или разных диапазонов излучения и оптико-электронный модуль с системой линз и светочувствительной матрицей большего диаметра для приема и передачи изображения с высокой разрешающей способностью, в частности, равной или большей 4К, при этом функциональная головка размещена в корпусе соединительной части, которая выполнена существенно большего диаметра, чем диаметр трубчатой части съемной дистальной насадки, благодаря чему обеспечена возможность размещения источников излучения большого размера и мощности.
В одном из вариантов реализации каждый последующий в проксимальном направлении насадки контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь соединительной части.
В одном из вариантов реализации каждый последующий в дистальном направлении насадки контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь соединительной части.
В одном из вариантов реализации трубчатая часть и соединительная часть насадки выполнены в виде осесимметричных тел, имеющих общую продольную ось симметрии.
В одном из вариантов реализации соединительная часть содержит множество контактных элементов, расположенных в один или несколько рядов, которые расположены под наклоном к продольной оси соединительной части или же линия, соединяющая центры контактных элементов каждого из указанных рядов расположена под наклоном к общей продольной оси симметрии.
Угол наклона может быть подобран исходя из необходимого количества контактных элементов, которые требуется разместить при заданном диаметре соединительной части.
В различных вариантах реализации угол наклона составляет от 0,05 до 89,5 градусов, от 0,5 до 45 градусов, от 5 до 10 градусов, от 7 до 15 градусов, от 2 до 17 градусов, от 3 до 12 градусов, от 3 до 10 градусов, от 5 до 7 градусов, от 5 до 25 градусов, от 10 до 35 градусов, от 15 до 35 градусов, от 20 до 40 градусов, от 25 до 45 градусов.
В одном варианте реализации радиальное расстояние между контактными поверхностями каждого из рядов контактных элементов и продольной осью насадки постоянно уменьшается при приближении контактных элементов к проксимальному концу насадки.
В другом варианте реализации радиальное расстояние между контактными поверхностями каждого из рядов контактных элементов и продольной осью симметрии постоянно увеличивается при приближении контактных элементов к проксимальному концу насадки.
В одном из вариантов реализации контактные элементы насадки расположены по прямой линии.
В одном из вариантов реализации контактные элементы насадки расположены по кривой линии.
В одном из вариантов реализации кривая линия представляет собой винтовую линию.
Контактные элементы выполнены с возможностью подачи через них питания и/или передачи информационных сигналов между функциональной головкой и управляющим блоком.
В одном из вариантов реализации на соединительной части расположены два или более ряда контактных элементов, расположенных со смещением друг относительно друга в окружном направлении соединительной части.
В одном из вариантов реализации насадка дополнительно содержит электрические контактные элементы, расположенные на торцевой поверхности проксимального конца соединительной части.
В одном из вариантов реализации насадка содержит направляющие средства, задающие ориентацию насадки с обеспечением по существу равного зазора между контактными элементами насадки и соответствующими ответными контактными элементами управляющего блока при вставке насадки в управляющий блок. Направляющие средства могут быть выполнены в виде выступа. В этом случае управляющий блок содержит паз, соответствующие по форме и размеру выступу. В другом варианте реализации направляющие средства выполнены в виде лыски.
В одном из вариантов реализации насадка содержит метку радиочастотной идентификации для идентификации указанной съемной дистальной насадки при ее присоединении к управляющему блоку.
В одном из вариантов реализации насадка содержит фиксирующий элемент для разъемной фиксации насадки в управляющем блоке при его взаимодействии со средствами фиксации, расположенными в указанном управляющем блоке, причем фиксирующий элемент выполнен с возможностью высвобождения насадки из управляющего блока при приведении в действие средства извлечения, расположенного на управляющем блоке.
В вариантах реализации изобретения функциональная головка содержит электронные компоненты, представляющие собой одно из следующего: средства считывания информации, например видеоголовку; средства генерации излучения, например источник ультразвукового излучения, источник ультрафиолетового излучения, источник инфракрасного излучения, источник видимого света, источник лазерного излучения; или средства термического воздействия, например электрод.
В одном из вариантов реализации функциональная головка содержит по меньшей мере один светодиод для освещения места обследования.
В одном из вариантов реализации по меньшей мере один из контактных элементов обеспечивает подачу питания на насадку, причем указанный по меньшей мере один контактный элемент имеет меньшую длину, чем остальные контактные элементы.
В одном из вариантов реализации функциональная головка расположена на дистальном конце трубчатой части насадки.
В одном из вариантов реализации соединительная часть насадки имеет корпус, а функциональная головка размещена внутри указанного корпуса и содержит по меньшей мере один источник светового излучения, используемого для освещения исследуемой области, и оптико-электронный модуль для приема оптического излучения, отраженного от исследуемого объекта, его преобразования и формирования на его основании видеосигнала высокого разрешения.
В одном из вариантов реализации трубчатая часть насадки содержит защитное окно, расположенное на ее дистальном конце, и по меньшей мере два оптических канала, один из которых выполнен с возможностью передачи светового излучения от указанного по меньшей мере одного источника светового излучения до указанного защитного окна для освещения через него исследуемой области, а второй оптический канал выполнен с возможностью передачи отраженного от исследуемой области светового излучения и прошедшего через указанное защитное окно, от указанного защитного окна по существу без искажений до оптико-электронного модуля.
В одном из вариантов реализации соединительная часть насадки имеет корпус, а функциональная головка размещена внутри указанного корпуса и содержит оптико-электронный модуль для приема оптического излучения, отраженного от исследуемого объекта, его преобразования и формирования на его основании видеосигнала высокого разрешения, а трубчатая часть насадки содержит защитное окно и по меньшей мере один источник светового излучения для освещения исследуемой области, расположенные на ее дистальном конце, и по меньшей мере один оптический канал, выполненный с возможностью передачи отраженного от исследуемой области светового излучения и прошедшего через указанное защитное окно, от указанного защитного окна до оптико-электронного модуля.
Согласно данному варианту реализации изобретения обеспечивается возможность размещения в корпусе соединительной части оптико-электронного модуля с системой линз и светочувствительной матрицей большего диаметра для приема и передачи изображения с высокой разрешающей способностью, в частности, равной или большей 4К.
В одном из вариантов реализации насадка выполнена в виде по существу осесимметричных тел, имеющих общую продольную ось симметрии.
Указанная выше задача решена также благодаря управляемой съемной дистальной насадке для медицинского диагностического прибора, содержащей
трубчатую часть, расположенную на дистальном участке указанной насадки, причем трубчатая часть содержит управляемый участок, расположенный на дистальном конце трубчатой части,
функциональную головку, расположенную на дистальном конце управляемого участка,
соединительную часть, расположенную на проксимальном участке насадки и выполненную с возможностью разъемного соединения насадки с управляющим блоком медицинского диагностического прибора, и
модуль управления указанной насадкой, соединенный с трубчатой частью и соединительной частью и выполненный с возможностью создания управляющих механических воздействий для управления управляемым участком трубчатой части.
При этом под соединением модуля управления с трубчатой частью и соединительной частью насадки следует понимать как непосредственное соединение указанных частей между собой, так и их опосредованное соединение посредством других компонентов насадки.
Управляемая съемная видеоэндоскопическая насадка согласно настоящему изобретению обеспечивает достижение технического результата, состоящего в обеспечении съемной дистальной насадки с удобным в управлении модулем управления, расположенным на самой насадке в непосредственной близости от рукоятки, удерживаемой оператором и выполненным с возможностью управления геометрической формой, в частности, изгибом управляемого участка трубчатой части насадки, простоте и повышении точности управления изгибом насадки, обеспечении возможности ее использования с различными медицинскими диагностическими приборами и расширения их функциональности за счет обеспечения управления геометрической формой насадки. Размещение средств управления насадкой на самой насадке позволяет также отказаться от использования механических средств управления, расположенных в управляющем блоке, упростить его конструкцию и тем самым повысить его компактность, надежность и удобство манипулирования управляемой дистальной насадкой. Кроме того, насадка может быть совместима с различными управляющими блоками. При этом указанная управляемая насадка может быть выполнена одноразовой, что позволяет отказаться от затратной операции стерилизации насадки и всего прибора, повысить гигиеничность медицинской диагностики и снизить эксплуатационные затраты. Кроме того, управляемая съемная насадка по настоящему изобретению позволяет обеспечить изготовление управляемых насадок с различными параметрами насадки, такими как материал и диаметр трубчатой части, а также размер и величина изгиба управляемого участка, которые могут использоваться с одним медицинским диагностическим прибором для расширения его функциональности или с разными диагностическими приборами для увеличения удобства применения эндоскопа в различных, например плановых или экстренных, ситуациях.
В одном из вариантов реализации модуль управления расположен между трубчатой частью и соединительной частью.
В одном из вариантов реализации трубчатая часть содержит жесткий участок, примыкающий к управляемому участку и соединенный с модулем управления насадкой.
В одном из вариантов реализации модуль управления управляемой съемной дистальной насадкой содержит корпус и механизм управления, расположенный внутри корпуса и выполненный с возможностью механического воздействия на управляющий участок для изменения геометрической формы управляемого участка трубчатой части.
В одном из вариантов реализации корпус модуля управления насадкой содержит дистальную стенку и проксимальную стенку, которые закреплены на проксимальном продолжении трубчатой части.
В одном из вариантов реализации соединительная часть примыкает к проксимальной стенке и неподвижно присоединена к ней.
В одном из вариантов реализации корпус модуля управления управляемой съемной дистальной насадкой содержит управляемый оператором орган управления, охватывающий механизм управления и выполненный с возможностью передачи механического воздействия на механизм управления и изменения тем самым геометрической формы управляемого участка трубчатой части.
В одном из вариантов реализации управляемый оператором орган управления имеет по существу цилиндрическую форму.
В одном из вариантов реализации механизм управления содержит по меньшей мере две тяги, проходящие внутри трубчатой части, посредством которых модуль управления насадкой связан с управляемым участком.
Благодаря тому, что тяги и средства управления ими полностью расположены внутри насадки, отсутствует необходимость в передаче управляющих воздействий от внешнего управляющего блока на указанные тяги.
В одном из вариантов реализации управляемый участок содержит кабель, выполненный в виде спирали, причем указанные тяги проходят внутри указанной спирали из кабеля.
В одном из вариантов реализации кабель выполнен с возможностью подачи через него питания и/или передачи информационных сигналов между функциональной головкой и управляющим блоком.
В одном из вариантов реализации функциональная головка содержит электронные компоненты, представляющие собой по меньшей мере одно из следующего: средства считывания информации, например видеоголовку; средства генерации излучения, например источник ультразвукового излучения, источник ультрафиолетового излучения, источник инфракрасного излучения, источник видимого света, источник лазерного излучения, или средства термического воздействия, например электрод.
В одном из вариантов реализации насадка также содержит метку радиочастотной идентификации для идентификации указанной управляемой съемной дистальной насадки при ее присоединении к управляющему блоку.
В одном из вариантов реализации механизм управления содержит барабан, приводимый во вращение органом управления, по меньшей мере две тяги и направляющую для тяг, причем дистальные концы указанных по меньшей мере двух тяг закреплены на дистальном конце управляемого участка, а их проксимальные концы закреплены на барабане, причем барабан выполнен с возможностью наматывания одной тяги и одновременного сматывания второй тяги при его вращении посредством указанного органа управления для изменения геометрической формы, в частности изгиба, управляемого участка.
В одном из вариантов реализации посредством наматывания одной тяги и одновременного сматывания второй тяги при вращении барабана обеспечено увеличение изгиба управляемого участка трубчатой части в одну сторону или уменьшение его изгиба в другую сторону в зависимости от направления вращения барабана, причем характеристика указанного управления является линейной.
В одном из вариантов реализации механизм управления модуля управления насадкой также содержит механизм фиксации формы управляемого участка, содержащий пружину, неподвижный фрикционный элемент и по меньшей мере один поворотный фрикционный элемент, выполненный с возможностью взаимодействия с неподвижным фрикционным элементом посредством указанной пружины для предотвращения поворота барабана с целью фиксации требуемого изгиба управляемого участка.
В одном из вариантов реализации механизм фиксации формы управляемого участка выполнен с возможностью выведения поворотного фрикционного элемента из взаимодействия с неподвижным фрикционным элементом посредством продольного перемещения органа управления для обеспечения свободного поворота цилиндрического органа управления для изменения изгиба управляемого участка.
В одном из вариантов реализации соединительная часть содержит по меньшей мере два электрических контактных элемента, выполненных с возможностью контакта с ответными контактными элементами управляющего блока при присоединении насадки к управляющему блоку.
В одном из вариантов реализации контактные элементы выполнены в виде подпружиненных контактных элементов, высота которых в свободном состоянии больше, чем в состоянии контакта с контактными элементами управляющего блока после присоединения насадки к управляющему блоку.
В одном из вариантов реализации указанные электрические контактные элементы расположены в один или несколько рядов на соединительной части, причем каждый последующий в продольном направлении насадки контактный элемент каждого ряда смещен относительно предыдущего контактного элемента в радиальном направлении внутрь.
В одном из вариантов реализации по меньшей мере один из указанных контактных элементов обеспечивает подачу через него электропитания на насадку, причем указанный по меньшей мере один контактный элемент имеет меньшую длину, чем остальные контактные элементы.
Указанные признаки обеспечивают возможность быстрой замены насадки, в том числе ее «горячей замены» непосредственно во время проведения диагностики без отключения источника питания, благодаря тому, что замыкание контактов, на которые подается питание, происходит в последнюю очередь, когда замкнуты все остальные контакты. Аналогично, при разъединении контакты, на которые подается питание, отключаются первыми.
Настоящее изобретение также относится к управляющему блоку для съемной дистальной насадки медицинского диагностического прибора, содержащему
приемную часть для присоединения съемной дистальной насадки к управляющему блоку,
электронный блок для управления электронными компонентами дистальной насадки и
по меньшей мере два электрических контактных элемента, являющихся ответными к электрическим контактным элементам съемной дистальной насадки, расположенных в ряд на указанной приемной части и выполненных с возможностью контакта с контактными элементами съемной дистальной насадки при ее присоединении к управляющему блоку,
причем каждый последующий в продольном направлении приемной части ответный контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь приемной части.
В одном из вариантов реализации каждый последующий в проксимальном направлении приемной части контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь приемной части.
В одном из вариантов реализации каждый последующий в дистальном направлении приемной части контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь приемной части.
В одном из вариантов реализации приемная часть содержит множество ответных контактных элементов, расположенных в один или несколько рядов, проходящих в продольном направлении. При этом линия, соединяющая центры ответных контактных элементов каждого из указанных рядов расположена под наклоном к общей продольной оси симметрии приемной части.
В различных вариантах реализации, угол наклона указанного ряда или рядов выбран из следующих интервалов: от 0,05 до 89,5 градусов, от 0,5 до 45 градусов, от 5 до 10 градусов, от 7 до 15 градусов, от 10 до 15 градусов, от 10 до 20 градусов, от 5 до 25 градусов, от 10 до 35 градусов, от 15 до 35 градусов, от 20 до 40 градусов, от 25 до 45 градусов.
В одном варианте реализации, радиальное расстояние между контактными поверхностями каждого из рядов контактных элементов и продольной осью приемной части постоянно уменьшается при приближении контактных элементов к проксимальному концу приемной части.
В другом варианте реализации, радиальное расстояние между контактными поверхностями каждого из рядов контактных элементов и продольной осью приемной части постоянно увеличивается при приближении контактных элементов к проксимальному концу приемной части.
В результате проведенных экспериментальных испытаний в процессе создания изобретения было установлено, что совокупность указанных признаков позволяет, во-первых, разместить большое количество контактных элементов при ограниченном диаметре разъема, образованного приемной частью и соединительной частью, составляющем как правило от 10 до 15 мм, и во-вторых, обеспечить легкость соединения, снижение трения и исключить или снизить вероятность несанкционированного случайного замыкания пар контактных элементов насадки и рукоятки в процессе установки насадки в рукоятку.
Экспериментально был установлен предпочтительный интервал угла наклона, при котором с одной стороны, обеспечивается исключение или снижение вероятности несанкционированного случайного замыкания пар контактных элементов разъема, снижение трения, и простота соединения, а с другой стороны, обеспечивается компактность соединительной части насадки, и соответственно, приемной части рукоятки, а также комфортная величина усилия, прилагаемого специалистом при соединении разъема, установке соединительной части в рукоятку и разъединении насадки и рукоятки по окончании работы. одном из вариантов реализации ответные контактные элементы расположены по прямой линии.
В одном из вариантов реализации ответные контактные элементы расположены по кривой линии, при этом указанная кривая линия может представлять собой винтовую линию или спиралевидную линию, например, в случае конической формы соединительной и приемной частей.
В одном из вариантов реализации ответные контактные элементы выполнены с возможностью подачи через них питания и/или передачи информационных сигналов между управляющим блоком и съемной дистальной насадкой.
В одном из вариантов реализации на приемной части расположены два или более ряда контактных элементов, расположенных со смещением друг относительно друга в окружном направлении приемной части и выполненных с возможностью контакта с соответствующими рядами контактных элементов насадки.
В одном из вариантов реализации управляющий блок дополнительно содержит электрические контактные элементы, выполненные с возможностью взаимодействия с торцевыми контактными элементами насадки.
В одном из вариантов реализации управляющий блок также содержит направляющие средства, обеспечивающие при вставке насадки в управляющий блок однозначную ориентацию насадки относительно приемной части с обеспечением по существу равного зазора между контактными элементами насадки и соответствующими им ответными контактными элементами управляющего блока.
В одном из вариантов реализации ответные контактные элементы выполнены в виде подпружиненных контактных элементов, высота которых в свободном состоянии больше, чем в состоянии контакта с контактными элементами насадки после ее присоединения к управляющему блоку.
В одном из вариантов реализации управляющий блок также содержит средства фиксации, выполненные с возможностью взаимодействия со средствами фиксации, расположенными на съемной дистальной насадке, для фиксации съемной дистальной насадки в управляющем блоке после ее присоединения, причем средства фиксации управляющего блока выполнены с возможностью высвобождения съемной дистальной насадки посредством приведения в действие средства извлечения, расположенного на управляющем блоке.
В одном из вариантов реализации средства извлечения выполнены в виде нажимной кнопки.
В одном из вариантов реализации управляющий блок также содержит рукоятку для ее захвата оператором при манипулировании насадкой.
Настоящее изобретение относится также к управляющему блоку для управляемой съемной дистальной насадки медицинского диагностического прибора, содержащему приемную часть, выполненную с возможностью присоединения заявленной управляемой съемной дистальной насадки.
В одном из вариантов реализации управляющий блок дополнительно содержит электронный блок для выработки управляющих сигналов, обеспечивающих управление электронными компонентами насадки, и
по меньшей мере два электрических контактных элемента, являющихся ответными к электрическим контактным элементам управляемой съемной дистальной насадки и выполненных с возможностью контакта с контактными элементами управляемой съемной дистальной насадки при ее присоединении к управляющему блоку.
В одном из вариантов реализации управляющий блок дополнительно содержит средства фиксации, выполненные с возможностью взаимодействия со средствами фиксации, расположенными на управляемой съемной дистальной насадке, для фиксации дистальной насадки в управляющем блоке после ее присоединения, причем средства фиксации управляющего блока выполнены с возможностью высвобождения дистальной насадки посредством приведения в действие средства извлечения, расположенного на управляющем блоке.
В одном из вариантов реализации средство извлечения выполнено в виде нажимной кнопки.
В одном из вариантов реализации управляющий блок содержит рукоятку для ее захвата оператором при манипулировании управляемой съемной дистальной насадкой.
Настоящее изобретение относится также к медицинскому диагностическому прибору, содержащему
управляющий блок для съемной дистальной насадки для медицинского диагностического прибора и съемную дистальную насадку, причем
насадка и управляющий блок соединены посредством разъема, выполненного в виде вставляемых один в другой соединительных элементов, на внешней поверхности одного из которых и на внутренней поверхности другого выполнены ряды контактных элементов, проходящие в направлении продольной оси разъема под наклоном к указанной оси.
В одном из вариантов реализации каждый последующий в дистальном направлении насадки контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь разъема.
В одном из вариантов реализации разъем выполнен в виде осесимметричных тел, имеющих общую продольную ось симметрии.
В одном из вариантов реализации разъем содержит множество контактных элементов, расположенных на внешней поверхности одного соединительного элемента и на внутренней поверхности другого соединительного элемента в один или несколько рядов, проходящих под наклоном к продольной оси разъема.
Угол наклона может быть подобран исходя из необходимого количества контактных элементов, которые требуется разместить при заданном диаметре соединительной части.
В различных вариантах реализации угол наклона составляет от 0,05 до 89,5 градусов, от 0,5 до 45 градусов, от 5 до 10 градусов, от 7 до 15 градусов, от 2 до 17 градусов, от 3 до 12 градусов, от 3 до 10 градусов, от 5 до 7 градусов, от 5 до 25 градусов, от 10 до 35 градусов, от 15 до 35 градусов, от 20 до 40 градусов, от 25 до 45 градусов.
В одном варианте реализации радиальное расстояние между контактными поверхностями каждого из рядов контактных элементов и продольной осью разъема постоянно уменьшается при приближении контактных элементов к оконечности разъема.
В другом варианте реализации радиальное расстояние между контактными поверхностями каждого из рядов контактных элементов и продольной осью симметрии постоянно увеличивается при приближении к оконечности разъема.
В различных вариантах реализации контактные элементы расположены по прямой линии, по кривой линии, например, по винтовой линии.
Контактные элементы выполнены с возможностью подачи через них питания и/или передачи информационных сигналов между функциональной головкой и управляющим блоком.
В одном из вариантов реализации контактные элементы, расположены в два или более рядов со смещением друг относительно друга в окружном направлении разъема.
Настоящее изобретение относится также к медицинскому диагностическому прибору, содержащему
заявленный управляющий блок для съемной дистальной насадки для медицинского диагностического прибора, и
заявленную съемную дистальную насадку.
Настоящее изобретение относится также к медицинскому диагностическому прибору, содержащему
заявленный управляющий блок для управляемой съемной дистальной насадки для медицинского диагностического прибора, и
заявленную управляемую съемную дистальную насадку.
В одном из вариантов реализации медицинский диагностический прибор дополнительно содержит устройство отображения, выполненное с возможностью соединения с указанным управляющим блоком для вывода изображения, воспринимаемого съемной дистальной насадкой.
Настоящее изобретение также относится к разъему для медицинского диагностического прибора, содержащему контактные элементы для подачи через них питания и/или передачи информационных сигналов,
причем указанный разъем содержит вставляемую одна в другую соединительную и приемную части, при этом на внешней поверхности соединительной части и на внутренней поверхности приемной части выполнены взаимно соответствующие ряды из по меньшей мере двух контактных элементов в каждом из соединительной и приемной частей, проходящие в направлении продольной оси разъема под наклоном к указанной оси, так что каждый последующий в продольном направлении разъема контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь соединительной части и кнаружи приемной части разъема.
Согласно изобретению, разъем может использоваться для приема и/или передачи множества сигналов к/от насадки от/к управляющему блоку согласно настоящему изобретению.
В конкретных вариантах реализации разъема угол наклона указанного ряда или рядов выбран из следующих интервалов: от 0,05 до 89,5 градусов, от 0,5 до 45 градусов, от 5 до 25 градусов, от 4 до 7 градусов, от 5 до 10 градусов, от 7 до 15 градусов, от 10 до 15 градусов, от 10 до 20 градусов, от 10 до 35 градусов, от 15 до 35 градусов, от 20 до 40 градусов, от 25 до 45 градусов.
В одном из вариантов реализации, радиальное расстояние между контактными поверхностями каждого из контактных элементов и продольной осью соединительной части разъема постоянно уменьшается, а радиальное расстояние между контактными поверхностями каждого из ответных контактных элементов и продольной осью приемной части разъема постоянно увеличивается при приближении контактных элементов к оконечности разъема.
В одном из вариантов реализации разъема, контактные поверхности контактных элементов расположены в плоскости, проходящей под наклоном к продольной оси разъема.
В конкретных вариантах реализации, ряд контактных элементов разъема выполнен в виде прямой линии, кривой линии, зигзагообразной линии, винтовой линии, спиралеобразной линии.
В одном из вариантов реализации, на каждой из соединительной и приемной частей разъема расположены по два или более ряда контактных элементов, расположенных со смещением друг относительно друга в окружном направлении.
В одном из вариантов реализации разъем дополнительно содержит электрические контактные элементы, расположенные на торцевой поверхности соединительной части и ответные контактные элементы, расположенные на внутренней торцевой поверхности приемной части.
В одном из вариантов реализации количество пар контактных элементов в разъеме составляет от 2 до 40 или более, предпочтительно от 4 до 12, от 10 до 20, от 16 до 24, от 20 до 40 пар контактных элементов.
В одном из вариантов реализации разъема, контакты приемной части выполнены в виде подпружиненных контактов, а контакты соединительной части в виде плоских пластинок, или наоборот.
В одном из вариантов реализации разъема, соединительная часть имеет форму цилиндра, конуса, пирамиды, усеченного конуса, усеченной пирамиды, или их сочетания.
В одном из вариантов реализации разъем также содержит направляющие средства, обеспечивающие по существу равный зазор между контактными элементами соединительной части насадки и соответствующими ответными контактными элементами приемной части управляющего блока при вставке насадки в управляющий блок.
В одном из вариантов реализации разъем также содержит метку радиочастотной идентификации для идентификации указанной съемной дистальной насадки при ее присоединении к управляющему блоку.
В одном из вариантов реализации разъем также содержит фиксирующий элемент для разъемной фиксации насадки в управляющем блоке при его взаимодействии со средствами фиксации, расположенными в указанном управляющем блоке, причем фиксирующий элемент выполнен с возможностью высвобождения насадки из управляющего блока при приведении в действие средства извлечения, расположенного на управляющем блоке.
Настоящее изобретение относится также к способу использования заявленного медицинского диагностического прибора, согласно которому:
- присоединяют заявленную съемную дистальную насадку к заявленному управляющему блоку посредством описанного выше разъема;
- подают электропитание на управляющий блок;
- вводят съемную дистальную насадку в обследуемую область тела пациента;
- осуществляют диагностику, определяемую видом присоединенной съемной дистальной насадки.
Краткое описание чертежей
Описание настоящего изобретения сопровождается чертежами, на которых изображены:
на фиг. 1 изображен аксонометрический вид медицинского диагностического прибора, состоящего из управляющего блока, выполненного в виде рукоятки, с присоединенной съемной дистальной насадкой согласно одному из вариантов реализации изобретения;
на фиг. 2 изображен аксонометрический вид управляющего блока, выполненного в виде рукоятки, согласно одному из вариантов реализации изобретения;
на фиг. 3 изображен аксонометрический вид съемной видеоэндоскопической дистальной насадки согласно одному из вариантов реализации изобретения;
на фиг. 4 изображен аксонометрический вид съемной дистальной насадки с размещенной на ней антенной и электронными компонентами радиочастотной метки согласно одному из вариантов реализации изобретения;
на фиг. 5 изображен аксонометрический вид проксимальной контактной группы съемной видеоэндоскопической дистальной насадки и механизма 5 фиксации съемной видеоэндоскопической дистальной насадки 2 в рукоятке 1;
на фиг. 6 изображен аксонометрический вид дистальной контактной группы управляющего блока согласно одному из вариантов реализации изобретения;
на фиг. 7 изображены контактные группы видеоэндоскопической дистальной насадки и управляющего блока в соединенном состоянии согласно одному из вариантов реализации изобретения;
на фиг. 8 изображен вид двух смежных контактов видеоэндоскопической дистальной насадки и управляющего блока в момент их начального совместного контакта и в замкнутом состоянии согласно одному из вариантов реализации изобретения;
на фиг. 9 изображен аксонометрический вид съемной видеоэндоскопической дистальной насадки согласно одному из вариантов реализации изобретения;
на фиг. 10 изображены контактные группы видеоэндоскопической дистальной насадки и управляющего блока в соединенном состоянии согласно одному из вариантов реализации изобретения;
на фиг. 11 изображена проксимальная часть оптической системы видеоэндоскопической дистальной насадки согласно одному из вариантов реализации изобретения;
на фиг. 12 изображена дистальная часть оптической системы видеоэндоскопической дистальной насадки согласно одному из вариантов реализации изобретения;
на фиг. 13 изображен аксонометрический вид съемной управляемой видеоэндоскопической дистальной насадки согласно одному из вариантов реализации изобретения;
на фиг. 14 изображен аксонометрический вид механизма управления съемной управляемой видеоэндоскопической дистальной насадки согласно одному из вариантов реализации изобретения;
на фиг. 15 изображен аксонометрический вид механизма управления съемной управляемой видеоэндоскопической дистальной насадки согласно одному из вариантов реализации изобретения;
на фиг. 16 изображен аксонометрический вид управляемого участка съемной видеоэндоскопической дистальной насадки согласно одному из вариантов реализации изобретения;
на фиг. 17 изображен аксонометрический вид управляемого участка без цилиндрического тела, трубчатой оболочки и видеоголовки согласно одному из вариантов реализации изобретения;
на фиг. 18А, 18Б изображен аксонометрический вид управляемого участка без цилиндрического тела, трубчатой оболочки, гибкого ленточного кабеля и видеоголовки согласно одному из вариантов реализации изобретения.
Осуществление изобретения
Ниже приведено описание медицинского диагностического прибора на примере многокомпонентной видеоэндоскопической системы со съемными видеоэндоскопическими дистальными насадками.
Под дистальной насадкой понимается функциональный элемент медицинского диагностического прибора, например видеоэндоскопической системы, присоединяемый к управляющему блоку медицинского диагностического прибора и содержащий на своем дистальном участке трубчатую часть или тело, вводимое в исследуемую область тела пациента для проведения диагностики, а также функциональную головку, расположенную в трубчатом теле или на проксимальном участке насадки и содержащую оптические и электронные компоненты, предназначенные для формирования светового или иного воздействия, используемого при диагностике исследуемой области пациента, а также приема и преобразования отраженного от исследуемой области сигнала и его передачи на устройство отображения медицинского диагностического прибора.
В одном из вариантов реализации изобретения медицинский диагностический прибор представляет собой видеоэндоскопическую систему, называемую ниже также видеоэндоскопом, со съемными видеоэндоскопическими дистальными насадками, изображенную на фиг. 1, которая содержит: управляющий блок, выполненный в виде рукоятки 1, которая изображена более подробно на фиг. 2 и содержит приемную часть, предназначенную для присоединения видеоэндоскопической дистальной насадки к управляющему блоку; набор съемных одноразовых видеоэндоскопических дистальных насадок 2, одна из которых при работе видеоэндоскопа размещена в отверстии приемной части рукоятки 1; и устройство 100 отображения видеосигнала, имеющее электрическое соединение посредством соединительного кабеля 3 с рукояткой 1 видеоэндоскопа и предназначенное для обработки, вывода, хранения и передачи во внешние информационные системы или системы хранения данных изображения, воспринимаемого съемной видеоэндоскопической дистальной насадкой 2. Далее в описании термины «рукоятка» и «управляющий блок» используются взаимозаменяемо.
В одном из вариантов реализации рукоятка 1 выполнена в виде полого пластикового корпуса, содержащего трубчатую часть, расположенную в его верхней части и включающую в себя расположенный на дистальном участке 38 рукоятки 1 приемную часть в виде отверстия 400 для присоединения съемной насадки 2, и нижнюю часть, предназначенную для обхвата и удерживания рукоятки 1 рукой во время ее использования. В одном из вариантов реализации изобретения, рукоятка 1 содержит электрические кнопки 6 управления, электронный блок 8 и контактную группу 4 управляющего блока, содержащую подпружиненные контактные элементы 12, являющиеся ответными контактными элементами, предназначенными для взаимодействия с контактными элементами съемной видеоэндоскопической дистальной насадки 2. На проксимальном участке 39 рукоятки 1 расположена кнопка 7 для извлечения вставленной в рукоятку 1 съемной дистальной насадки 2, более подробно описанная ниже.
Наряду с вариантом осуществления, в котором приемная часть управляющего блока охватывает соединительную часть насадки 2 при ее присоединении к управляющему блоку, возможен альтернативный вариант реализации, в котором насадка 2 имеет приемное отверстие, расположенное на соединительной части насадки, а управляющий блок имеет выступающую приемную часть, охватываемую приемным отверстием соединительной части насадки 2. При этом вариант осуществления, при котором приемная часть управляющего блока охватывает соединительную часть насадки 2, является предпочтительным, поскольку в данном случае обеспечивается более высокая защита приемного отверстия, в особенности, ответных контактных элементов управляющего блока от загрязнения, в частности, вследствие возможного проникновения в него физиологических жидкостей.
В одном из вариантов реализации изобретения электронный блок 8 рукоятки 1, изображенный на фиг. 2, выполнен в виде электронной платы с электронными компонентами и соединен с устройством 100 обработки и отображения видеосигнала посредством кабеля 3, а также с дистальной контактной группой 4 рукоятки 1 и кнопками 6 управления. В одном из вариантов реализации изобретения электронный блок 8 содержит микропроцессор для обработки видеосигналов, полученных с функциональной головки, в частности видеоголовки 17, съемной видеоэндоскопической дистальной насадки 2 (см. фиг. 3), и для выработки управляющих электрических сигналов, обеспечивающих управление электронными компонентами насадки 2, в частности, видеосенсором видеоголовки 17, а также другими электронными компонентами функциональной головки, такими как светодиоды освещения, функциональные диагностические модули и т.п. в случае их наличия. Электронные компоненты электронного блока 8 реализуют необходимые входные интерфейсы, например MIPI CSI, для получения данных от видеосенсора и других функциональных элементов, обработки этих данных и передачи обработанного сигнала через выходные интерфейсы по соединительному кабелю 3 на устройство 100 отображения видеосигнала. Выходные интерфейсы электронного блока 8 должны обеспечивать достаточную пропускную способность и передачу сигнала на необходимое расстояние. В качестве выходных интерфейсов электронного блока 8 могут использоваться, например, HDMI, DisplayPort и/или Thunderbolt, USB 3. При использовании видеосенсора с выходным интерфейсом, не поддерживаемым электронным модулем 8, в съемной дистальной насадке 2 могут быть расположены электронные компоненты для согласования интерфейсов видеосенсора и электронного блока 8. Необходимость размещения дополнительных электронных компонентов определяется на этапе инженерной реализации изобретения. В одном из вариантов реализации изобретения в электронном блоке 8 реализуется контроллер NFC, а в рукоятке 1 размещается его антенна. Обработка этих данных электронным блоком 8 позволяет использовать в электронном блоке 8 необходимое для корректной работы с видеосенсором программное обеспечение, например драйвер. Кроме того, в одном из вариантов реализации изобретения электронный блок 8 реализует физические или логические интерфейсы для обмена командами с устройством 100 отображения видеосигнала. Выбор интерфейсов передачи данных и команд осуществляется при инженерной реализации изобретения.
В одном из вариантов реализации изобретения электрические кнопки 6 управления расположены на корпусе рукоятки 1 в месте, удобном для их использования оператором или врачом во время видеоэндоскопического обследования. Электрические кнопки 6 управления электрически соединены с электронным блоком 8. В одном из вариантов реализации изобретения пользователь при нажатии кнопки 6 может, например, сохранять кадры видеоизображения и/или останавливать/запускать запись видеоизображения.
В одном из вариантов реализации изобретения устройство 100 отображения видеосигнала, изображенное на фиг. 1, содержит устройство отображения, например дисплей с TFT матрицей, устройство согласования форматов выходного сигнала электронного блока 8 и входного сигнала устройства отображения, такое как контроллер матрицы, например с HDMI входом и LVDS или eDP выходом. Кроме того, устройство 100 отображения видеосигнала может содержать электронные компоненты для сохранения кадров видеоизображений и/или всего или части видеосигнала и их записи на внешние носители, например флеш-память, и/или передачи их на внешние, включая удаленные, устройства записи и хранения. Далее устройство 100 отображения видеосигнала в изобретении подробно не рассматривается, а его состав и возможности определяются на этапе инженерной реализации изобретения.
В одном из вариантов реализации изобретения съемная видеоэндоскопическая дистальная насадка 2, изображенная на фиг. 3, выполнена в виде комбинации по существу цилиндрических тел вращения и/или конусообразных тел различных диаметров, формы и различной степени жесткости, включающих в себя цилиндрическую трубчатую часть 16, имеющую продольную ось симметрии L0, защитный колпачок 15, продольная ось которого совпадает с продольной осью L0 трубчатой части 16, и по существу цилиндрическую или конусообразную соединительную часть 50, выполненную с возможностью разъемного соединения с рукояткой 1 видеоэндоскопа, т.е. представляющую собой средство разъемного соединения насадки 2 с управляющим блоком медицинского диагностического прибора, и имеющую продольную ось L1, совпадающую в данном варианте реализации с продольной осью L0 цилиндрической трубчатой части 16 и защитного колпачка 15, задающих совместно продольную ось видеоэндоскопической дистальной насадки 2. В одном из вариантов реализации соединительная часть 50 может быть также выполнена по существу в форме усеченного конуса, сужающегося в проксимальном направлении насадки 2 и имеющего продольную ось L1. Соединительная часть 50 может быть также выполнена в форме тела, охватывающая поверхность которого имеет форму цилиндра, конуса, пирамиды или их комбинации, имеющего преимущественно ось или плоскость симметрии.
В одном варианте реализации изобретения насадка 2 выполнена в виде по существу осесимметричных тел, т.е. тел, имеющих пространственную ось симметрии, причем оси указанных тел совпадают. При таком варианте реализации все внешние силы, действующие на насадку, направлены преимущественно вдоль ее продольной оси, а внешние силы, действующие на компоненты насадки в процессе присоединения и отсоединения насадки 2 от рукоятки 1, а также в процессе ее использования при проведении диагностики, сведены по существу к минимуму вследствие минимизации возможных крутящих моментов, действующих на компоненты насадки.
Съемная видеоэндоскопическая дистальная насадка 2 имеет дистальный конец 40, к которому примыкает дистальный участок 42 насадки, предназначенный для осуществления манипуляций в теле пациента, и противоположный ему проксимальный конец 41, к которому примыкает проксимальный участок 43 насадки, на котором насадка присоединяется к рукоятке 1. На своем дистальном участке 42 видеоэндоскопическая дистальная насадка 2 содержит неуправляемую вводимую часть, выполненную в виде трубчатой части 16, и функциональную головку, содержащую видеоголовку 17, расположенную внутри трубчатой части 16 на ее дистальном конце. На проксимальном конце трубчатой части 16 к ней примыкает защитный колпачок 15, предназначенный для защиты рукоятки 1 и удобства манипулирования насадкой 2 при ее присоединении к рукоятке 1. Длина защитного колпачка вдоль продольной оси насадки может составлять в практическом варианте реализации величину от 20 до 40 мм. На своем проксимальном участке 43 насадка 2 содержит примыкающую к защитному колпачку 15 соединительную часть 50 с расположенными на ней электрическими контактными элементами, посредством которой насадка присоединяется к приемному элементу рукоятки 1. Расположение трубчатой части 16 на дистальном участке 42 насадки означает, что она расположена дистально, т.е. со стороны дистального конца 40 указанной насадки, который расположен ближе к пациенту, чем проксимальный конец 41 указанной насадки. При этом указанная трубчатая часть 16 насадки 2, непосредственно предназначенная для ее введения в исследуемую область тела пациента, может составлять существенную часть длины дистальной насадки 2, в частности, более 50% общей длины насадки 2.
В одном из вариантов реализации изобретения видеоголовка 17 содержит источники освещения, например светодиоды, и оптико-электронный модуль, содержащий видеосенсор и систему линз, предназначенные для приема, обработки и передачи отраженных от обследуемой области сигналов, в частности видеоизображения, на электронный блок 8. Светодиоды и видеосенсор электрически соединены с контактными элементами, расположенными на печатной плате или платах, размещенных на соединительной части 50 на проксимальном участке 43 видеоэндоскопической дистальной насадки 2 и содержащих ряд 13 или ряды электрических контактных элементов для обмена сигналами с электронным блоком 8. Далее видеоголовка 17 в изобретении более подробно не рассматривается, а ее состав и возможности определяются на этапе инженерной реализации изобретения.
В одном из вариантов реализации изобретения защитный колпачок 15 является также защитным корпусом для электронных компонентов, размещенных в видеоэндоскопической дистальной насадке 2. Кроме того, он предназначен для предохранения управляющего блока от попадания в него физиологических жидкостей во время диагностики, а также обеспечения требуемых эргономических характеристик при манипуляциях с видеоэндоскопической дистальной насадкой 2, совершаемых врачом, например ее извлечение из рукоятки 1 и соединение с ней. Защитный колпачок может быть изготовлен за одно целое с одним из компонентов насадки, например методом литья под давлением, но может быть также изготовлен в виде отдельного элемента, насаживаемого на трубчатую часть 16 в процессе сборки насадки 2.
В одном из вариантов реализации съемной видеоэндоскопической дистальной насадки 2, изображенной на фиг. 4, последняя содержит идентификационную радиочастотную метку и электронные компоненты для радиочастотной идентификации, например NFC-антенну 18 и необходимые электронные компоненты, размещенные на печатной плате 19, расположенной под защитным колпачком 15. Идентификационная метка может содержать информацию о типе видеосенсора и его уникальный идентификационный код. Считывание указанной информации электронным блоком управления управляющего блока позволяет настроить управляющий блок на использование съемных насадок с различными типами видеосенсора. Наличие уникального идентификатора у видеоэндоскопической дистальной насадки 2 позволяет также вести учет эксплуатационной нагрузки на указанную насадку. Например, содержащуюся в идентификационной метке информацию можно использовать для контроля сроков хранения насадки в стерильной упаковке и того, использовалась ли ранее данная видеоэндоскопическая дистальная насадка 2 или нет, что может позволить предотвратить повторное использование уже использованной съемной видеоэндоскопической дистальной насадки 2.
Еще в одном варианте реализации изобретения в видеоэндоскопической дистальной насадке 2 могут быть расположены дополнительные электронные компоненты (не показаны), необходимые для правильного функционирования микросхемы видеосенсора, например smd-резисторы или конденсаторы. Необходимость в этих дополнительных элементах и их состав определяются производителем видеосенсора.
Трубчатая часть 16 насадки 2 служит для введения в тело пациента и приближения видеоголовки 17 к обследуемой врачом области, а диаметр трубчатой части 16 и ее длина определяется анатомическими особенностями и расположением этой области, а также видом диагностики. Например, для обследования полостей носа длина трубчатой части 16 составляет около 16-18 см, а ее диаметр имеет величину около 4 мм, а для обследования органов слуха длина трубчатой части 16 составляет 3-5 см при ее диаметре около 2-3 мм. Трубчатая часть 16 может быть выполнена в виде монолитного или полого цилиндрического тела из жестких материалов, таких как, например, нержавеющая сталь, или упругих материалов, таких как, например, силиконовая резина. В одном из вариантов реализации трубчатая часть 16 имеет круглое поперечное сечение для минимизации ее инвазивного воздействия во время проведения диагностики. Однако, поперечное сечения трубчатой части 16 насадки 2 может иметь также форму, отличную от круглой, например форму эллипса. В большинстве случаев применения съемной дистальной насадки 2 диаметр трубчатой части 16 составляет от 2 до 10 мм, чаще всего около 4 мм, а диаметр соединительной части составляет от 10 до 60 мм.
Соединительная часть 50 видеоэндоскопической дистальной насадки 2, изображенная на фиг. 3-5, расположена на проксимальном участке 43 указанной видеоэндоскопической дистальной насадки 2. В данном варианте реализации соединительная часть 50 насадки 2 выполнена в виде по существу цилиндрического тела, имеющего продольную ось L1 симметрии, и содержит два линейных ряда 13, 14 расположенных на ее поверхности электрических контактных элементов. В других вариантах реализации соединительная часть 50 может иметь форму поперечного сечения, отличную от круглой, например овальную, прямоугольную, трапециевидную и другие подходящие формы. Контактные элементы насадки 2 расположены в двух рядах 13 и 14 на печатных платах, размещенных по существу вдоль продольной оси L1 соединительной части 50 насадки 2 под наклоном 5 градусов к указанной оси и зеркально относительно указанной оси, так что контактные элементы в каждом из рядов приближаются к продольной оси насадки в проксимальном направлении насадки, т.е. каждый последующий в проксимальном направлении направлении насадки контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь соединительной части 50.
Расположение контактных элементов в ряд означает, что линия, соединяющая центры контактных элементов и, соответственно, их контактных поверхностей, образует прямую или кривую линию. В данном варианте реализации соединительная часть 50 и трубчатая часть 16 дистальной насадки 2 расположены соосно, так что их продольные оси L0 и L1 совпадают. Однако в общем случае продольная ось L0 трубчатой части 16 и продольная ось L1 ее соединительной части 50 могут не совпадать, в частности, они могут быть расположены параллельно или под углом друг к другу.
В других вариантах реализации изобретения контактные элементы насадки 2 могут быть расположены по кривой линии, например, по винтовой линии. Еще в одном варианте реализации изобретения соединительная часть 50 насадки 2 может иметь более двух рядов электрических контактных элементов, расположенных со смещением друг относительно друга в окружном направлении соединительной части 50 с по существу одним и тем же углом наклона указанных рядов контактных элементов к продольной оси насадки 2. Еще в одном варианте реализации изобретения ряд или ряды контактных элементов могут быть расположены на одной печатной плате по прямой и/или кривой, в частности, винтовой линии. Еще в одном варианте реализации изобретения контактные элементы могут быть расположены дополнительно на торцевой поверхности проксимального конца 41 видеоэндоскопической дистальной насадки 2.
Контактные элементы, являющиеся ответными для контактных элементов соединительной части видеоэндоскопической дистальной насадки 2, расположены в приемном элементе трубчатой части рукоятки 1 и будут подробно описаны ниже.
В альтернативном варианте реализации, в котором насадка 2 имеет приемное отверстие, расположенное на соединительной части 50 насадки, а управляющий блок или рукоятка 1 имеет выступающую приемную часть, охватываемую приемным отверстием соединительной части 50 насадки, печатные платы рядов 13, 14 контактных элементов насадки и ответных контактных элементов управляющего блока будут иметь противоположное расположение. То есть, печатные платы на насадки 2, на которых расположены два ряда 13, 14 контактных элементов, будут расположены под наклоном к продольной оси L1 соединительной части 50 дистальной насадки 2 с удалением контактных элементов от указанной оси в направлении проксимального конца насадки 2, т.е. их смещение в радиальном направлении, т.е. расстояние в радиальном направлении между контактными поверхностями контактных элементов видеоэндоскопической дистальной насадки 2, расположенных в рядах 13, 14 контактных элементов, и продольной осью L1 соединительной части 50 видеоэндоскопической дистальной насадки 2, будет увеличиваться при их приближении вдоль продольной оси L1 к проксимальному концу 41 указанной насадки 2, т.е. каждый последующий контактный элемент будет смещен относительно предыдущего контактного элемента в радиальном направлении внутрь в дистальном направлении насадки.
Контактные элементы насадки 2 могут быть выполнены любым известным способом, например в виде контактных площадок, вытравленных на жестких или полужестких печатных платах, например, круглой или прямоугольной формы с их последующим покрытием износоустойчивым материалом.
Контактные элементы управляющего блока, являющиеся ответными контактными элементами для контактных элементов насадки 2, в в одном из вариантов реализации изобретения представляют из себя подпружиненные контакты или погопины (pogo pin), контактная поверхность которых представляет собой полусферу или круглую поверхность со скругленными углами диаметром примерно 1 мм ± 0,5 мм, их длина в свободном (не поджатом) состоянии составляет от 3 до 5 мм, а максимальный ход штока между не поджатым и полностью поджатым состоянием составляет от 0,1 до 0,6 мм. В одном из вариантов реализации диаметр подпружиненных контактов составляет от 0,8 до 1,2 мм. Однако, в других вариантах реализации подпружиненные контакты могут иметь другое исполнение упругих контактов. Использование подпружиненных контактов обеспечивает также плотность соединения насадки 2 и рукоятки 1 за счет упругого воздействия множества подпружиненных контактов, обеспечивающих поджим насадки 2 в приемном элементе рукоятки 1.
В одном из вариантов реализации ширина площадки контактных элементов насадки 2 вдоль продольной оси L1 соединительной части 50 насадки соответствует по размерам проекции подпружиненного ответного контактного элемента (погопина) рукоятки 1. Например, если погопин имеет диаметр 1,5 мм, то ширина площадки в продольном направлении насадки имеет размер не более 1,5 мм, а ее длина, измеряемая в направлении, поперечном продольной оси, определяется допустимыми размерами соединительной части насадки 2 и может составлять от 1,5 до 5 мм. Величина шага между контактными элементами определятся диаметром погопина и минимальным требуемым расстоянием между ними и может составлять от 0,1 до 2 мм. Например, при диаметре погопина, составляющем 1,5 мм, и расстоянии между соседними погопинами, составляющем 0,1 мм, шаг контактных элементов, т.е. расстояние между центрами соседних контактных элементов насадки 2 и рукоятки 1 будет составлять 1,6 мм.
Контактные элементы насадки 2 размещены на печатных платах, а также электрически соединены с выходами видеосенсора и светодиодов, размещенных в видеоголовке 17 съемной дистальной видеоэндоскопической насадки 2. В в одном из вариантов реализациим вариант реализации печатные платы, на которых расположены ряды 13 и 14 контактных элементов съемной видеоэндоскопической дистальной насадки 2, расположены под наклоном к продольной оси L1 соединительной части 50 видеоэндоскопической дистальной насадки 2 с их приближением к указанной оси в направлении проксимального конца насадки и имеют угол наклона, образованный между линией, проходящей через центры контактных поверхностей контактных элементов, и продольной осью соединительной части дистальной насадки 2, составляющий в общем случае величину больше 0 и меньше 90 градусов. Другими словами, радиальное расстояние между контактными поверхностями контактных элементов съемной видеоэндоскопической дистальной насадки 2, расположенных в двух рядах 13 и 14 контактных элементов, и продольной осью видеоэндоскопической дистальной насадки 2 постоянно уменьшается при приближении контактных элементов к проксимальному концу насадки, т.е. каждый последующий в проксимальном направлении насадки 2 контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь. Образующийся при этом угол наклона рядов 13 и 14 контактных элементов к продольной оси L1 соединительной части 50 видеоэндоскопической дистальной насадки 2 составляет величину больше 0 и меньше 90 градусов. Под монотонным или постоянным изменением, в частности постоянным уменьшением или постоянным увеличением, в контексте настоящей заявки понимается постоянное уменьшение или, соответственно, постоянное увеличение соответствующей величины на любую положительную величину, т.е. изменение в одном направлении, при этом указанное изменение может быть как равномерным, так и неравномерным.
Для обеспечения компактности размеров насадки 2, в частности ее соединительной части 50, угол наклона рядов 13, 14 контактных элементов к продольной оси L1 соединительной части 50 насадки 2 составляет величину от более 0 до примерно 45 градусов, в одном из вариантов реализации составляет величину от более 0 до примерно 30 градусов, более в одном из вариантов реализации величину от более 0 до примерно 20 градусов, и наиболее в одном из вариантов реализации величину от более 0 до 10 градусов. При необходимости дальнейшего увеличения количества электрических пар контактных элементов насадки 2 и управляющего блока угол наклона рядов 13, 14 контактных элементов в практическом варианте реализации может составлять величину от 0,5 до 5 градусов. Согласно другим примерам реализации, угол наклона может быть выбран из следующих интервалов: от 5 до 15 градусов, от 10 до 15, от 10 до 20 градусов, от 5 до 25, от 10 до 35, от 15 до 35, от 20 до 40, от 25 до 45 градусов.
Предложенное техническое решение позволяет разместить от 1 до 40 и более контактных элементов при диаметре соединительной части от 10 до 15 мм.
Таким образом, в съемной дистальной насадке по настоящему изобретению каждый из расположенных в рядах 13, 14 контактных элементов смещен относительно смежного с ним контактного элемента в продольном, в частности проксимальном, направлении насадки 2, при этом радиальное расстояние между одним из двух смежных контактных элементов, расположенным в продольном направлении ближе к проксимальному концу 41 насадки 2, и продольной осью L0, L1 указанной насадки 2 меньше радиального расстояния между другим из указанных двух смежных контактных элементов и продольной осью насадки 2. Другими словами, радиальное расстояние между контактными элементами и продольной осью насадки 2 постоянно уменьшается в направлении проксимального конца 41 насадки, т.е. при приближении указанных контактных элементов каждого из рядов 13, 14 контактных элементов к проксимальному концу 41 указанной насадки 2, так что каждый последующий в проксимальном направлении насадки 2 контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь.
В частности, контактные элементы в рядах 13, 14 соединительной части 50 насадки 2 расположены таким образом, что продольные оси рядов 13, 14 контактных элементов совпадают с образующими прямого кругового конуса, ось которого совпадает с продольной осью L1 соединительной части 50 насадки 2, а его вершина расположена проксимально относительно указанного ряда контактных элементов. При этом телесные углы при вершинах конусов, построенных для каждого из рядов 13, 14 контактных элементов не обязательно должны быть равны, а вершины не обязательно должны совпадать. Таким образом, допускается линейное смещение друг относительно друга различных рядов контактных элементов вдоль продольной оси L1 соединительной части 50 насадки 2, и наклон одного ряда контактных элементов относительно продольной оси L1 соединительной части 50 насадки 2 может быть не равен наклону другого ряда контактных элементов.
Как видно на фиг. 4 и фиг. 5, за счет наклона рядов 13, 14 контактных элементов к продольной оси L1 соединительной части 50 насадки 2, радиальное расстояние между их контактными поверхностями постоянно, и в данном случае - равномерно, уменьшается в продольном направлении насадки 2. То есть при приближении указанных контактных элементов к проксимальному концу 41 насадки 2 радиальное расстояние между линией, проходящей через центры их контактных поверхностей перпендикулярно продольной оси L1 соединительной части 50 насадки 2 до указанной оси равномерно уменьшается. При этом, в данном варианте реализации, наиболее удаленные от продольной оси L1 соединительной части 50 насадки 2 контактные элементы, расположенные в рядах 13, 14 контактных элементов на фиг. 5 слева, размещены на расстоянии от указанной оси, равном примерно 4-5 мм, а наиболее близкие к ней контактные элементы, расположенные в рядах 13, 14 на фиг. 5 справа, размещены на расстоянии от указанной оси, равном примерно 1-2 мм. При этом угол наклона рядов 13, 14 контактных элементов к продольной оси L1 соединительной части 50 насадки 2 в данном варианте реализации составляет от 5 до 15 градусов. При небольших углах наклона печатных плат контактных элементов возможно расположение в ряд достаточно большого числа контактных элементов без существенного увеличения габаритов насадки 2, т.е. обеспечение ее компактности даже в случае размещения на насадке 2 и рукоятке 1 значительного количества контактных элементов.
Благодаря расположению контактных элементов насадки 2 по настоящему изобретению обеспечивается компактное выполнение соединительной части 50 насадки 2, диаметр которой в данном случае равен по существу удвоенному радиальному расстоянию наиболее удаленного контактного элемента от продольной оси L1 насадки 2, что в данном варианте реализации составляет 8-12 мм, длина соединительной части составляет 15-30 мм, что обеспечивает также компактность размеров приемной части рукоятки 1, охватывающего соединительную часть 50 насадки 2, в том числе, позволяет уменьшить диаметр дистальной части рукоятки 1, обеспечивая ее высокую эргономичность, что имеет важное значение, например, для интубационных эндоскопов, а также легкость и удобство управления насадкой 2 в процессе диагностики одной рукой врача, удерживающей рукоятку 1. Указанные диаметр и длина соединительной части 50 насадки 2 позволяют обеспечить изготовление съемных дистальных насадок, которые имеют требуемый минимальный диаметр трубчатой части насадки, вводимой в тело пациента, а также компактные размеры соединительной части, небольшой вес, небольшую стоимость, просты и удобны в использовании, обеспечивают простоту присоединения и отсоединения насадки 2 от рукоятки 1, а также обеспечивают при этом надежную передачу необходимого количества электрических и информационных сигналов между насадкой 2 и рукояткой 1 диагностического медицинского прибора. При этом дистальная насадка по изобретению может быть изготовлена съемной и одноразовой, что исключает необходимость ее стерилизации перед каждым использованием и повышает гигиеничность диагностики. Кроме того, в случае выполнения насадки в виде комбинации по существу тел вращения или осесимметричных тел, имеющих общую продольную ось симметрии, присоединение насадки 2 и ее отсоединение от рукоятки 1 происходит максимально интуитивно, просто и надежно вдоль продольной оси трубчатой части 16 насадки 2 и может осуществляться, в том числе, одной рукой врача, удерживающей рукоятку 1 медицинского диагностического прибора без опасности повреждения насадки за счет возникновения внешних крутящих моментов.
В одном из вариантов реализации изобретения рукоятка 1 также содержит средства фиксации (см. фиг. 5), представляющие собой механизм 5 фиксации съемной видеоэндоскопической дистальной насадки 2 в рукоятке 1, и механическую кнопку 7 для извлечения съемной видеоэндоскопической дистальной насадки 2 (см. фиг. 2). В одном из вариантов реализации изобретения механизм 5 фиксации съемной видеоэндоскопической дистальной насадки 2 содержит подпружиненную защелку, содержащую выступ 404 защелки и пружину 405 защелки. В одном из вариантов реализации изобретения средства фиксации рукоятки 1 выполнены с возможностью взаимодействия со средствами фиксации съемной дистальной насадки 2, представляющими собой выемку 403, расположенную на проксимальном конце соединительной части 50 съемной видеоэндоскопической дистальной насадки 2. При соединении съемной видеоэндоскопической дистальной насадки 2 с рукояткой 1 подпружиненная защелка совмещается с выемкой 403. Затем под действием пружины 405 защелки выступ 404 защелки входит в выемку 403 на проксимальном конце соединительной части 50 съемной видеоэндоскопической дистальной насадки 2 и, таким образом, фиксирует съемную видеоэндоскопическую дистальную насадку 2 во вставленном в рукоятку 1 положении, предотвращая ее перемещение в осевом направлении и обеспечение надежного контакта пар электрических контактных элементов насадки 2 и рукоятки 1 при проведении врачом видеоэндоскопических обследований.
В одном из вариантов реализации изобретения нажимная подпружиненная механическая кнопка 7 (см. фиг. 2), используемая в качестве средства извлечения насадки 2, расположена на проксимальном конце 39 рукоятки 1 и соединена со стержнем 406, другой конец которого соединен с подпружиненной защелкой механизма 5 фиксации. Механическая кнопка 7 видеоэндоскопической дистальной насадки 2 расположена в месте, удобном для ее нажатия одним из пальцев руки, удерживающей указанную видеоэндоскопическую дистальную насадку 2. При нажатии механической кнопки 7 пользователем, удерживающим рукоятку 1, она через стержень 406 отклоняет выступ 404 защелки из фиксирующего насадку 2 положения, тем самым высвобождая видеоэндоскопическую дистальную насадку 2 для ее извлечения из рукоятки 1. В качестве альтернативы, средства извлечения могут быть выполнены в виде поворотного рычага, сдвижного элемента и т.п. В альтернативном варианте реализации защелка и выемка средств фиксации видеоэндоскопической дистальной насадки 2 и рукоятки 1 могут быть поменяны местами.
Дополнительно рукоятка 1 может иметь нажимную пружину, нагружаемую при вставке видеоэндоскопической дистальной насадки 2 в рукоятку 1 и способствующую выталкиванию видеоэндоскопической дистальной насадки 2 при ее высвобождении из рукоятки 1 с помощью средства извлечения. Таким образом обеспечивается возможность замены видеоэндоскопической дистальной насадки 2 при помощи одной руки, удерживающей рукоятку 1, в том числе в режиме «горячей замены», т.е. без отключения напряжения электропитания дистальной насадки 2 со стороны управляющего блока или рукоятки 1 диагностического прибора. Таким образом, вторая свободная рука врача может быть использована для других манипуляций.
Размеры отверстия 400 рукоятки 1 и соединительной части 50 съемной видеоэндоскопической дистальной насадки 2 выполнены такими, что обеспечена возможность вставки соединительной части 50 съемной видеоэндоскопической дистальной насадки 2 в отверстие 400 рукоятки 1 с минимальным зазором между наружной поверхностью соединительной части 50 видеоэндоскопической дистальной насадки 2 и внутренней поверхностью отверстия 400 рукоятки 1. Таким образом обеспечивается направленное введение видеоэндоскопической дистальной насадки 2 в управляющий блок с обеспечением по существу равного зазора между каждым из контактных элементов видеоэндоскопической дистальной насадки 2 и соответствующим ответным контактным элементом управляющего блока, в частности рукоятки 1, при вставке съемной видеоэндоскопической дистальной насадки 2 в рукоятку 1.
В одном из вариантов реализации изобретения контактная группа 4 рукоятки 1, изображенная на фиг. 6, размещена в отверстии 400 приемной части, расположенном на дистальном конце трубчатой части рукоятки 1. Отверстие приемной части рукоятки 1 в варианте реализации изобретения выполнено в виде цилиндрического отверстия или отверстия, имеющего форму усеченного конуса, по существу комплементарного по форме геометрической форме соединительной части 50 насадки 2 и имеющего продольную ось L2. В одном из вариантов реализации изобретения контактная группа 4 содержит два ряда 9 и 10 подпружиненных контактных элементов, симметрично расположенных вдоль продольной оси L2 трубчатой части рукоятки 1 и выполненных с возможностью соединения с двумя рядами 13 и 14 контактных элементов соединительной части съемной видеоэндоскопической дистальной насадки 2 при ее вставке в рукоятку 1.
В рассматриваемом варианте реализации изобретения контактные элементы насадки 2 расположены на двух печатных платах, расположенных обращенными в противоположные стороны и содержащих ряды 13, 14 контактов, состоящий каждый из двенадцати контактных элементов соответственно, расположенных в ряду по прямой линии, проходящей под наклоном относительно продольного направления дистальной насадки 2. Указанное расположение рядов 13, 14 контактных элементов может быть также охарактеризовано как смещение одного ряда относительно другого ряда на 180 градусов в окружном направлении соединительной части насадки 2. Количество ответных контактных элементов каждого из рядов 9, 10 рукоятки 1 совпадает с количеством контактных элементов соответствующих рядов 13, 14 насадки 2. Таким образом, в указанном варианте реализации насадка 2 и приемная часть рукоятки 1 содержат по 24 контактных элемента.
Каждый из рядов 9 и 10 подпружиненных контактных элементов содержит печатную плату 11 и двенадцать расположенных на ней подпружиненных контактных элементов 12, размещенных на печатной плате 11 и имеющих с ней электрическое соединение. При этом печатные платы 11 расположены под наклоном к продольной оси L2 приемной части трубчатой части рукоятки 1 с удалением от указанной оси в направлении дистального конца трубчатой части, так что радиальное расстояние между контактными поверхностями подпружиненных контактных элементов 12 и продольной осью L2 трубчатой части рукоятки 1 увеличивается в дистальном направлении рукоятки 1.
Таким образом, каждый последующий из расположенных в рядах 9, 10 ответных контактных элементов смещен относительно смежного с ним в продольном направлении ответного контактного элемента приемной части рукоятки 1 как в продольном направлении рукоятки 1, так и в радиальном направлении внутрь, так что радиальное расстояние между одним из двух смежных ответных контактных элементов, расположенным в продольном направлении ближе к дистальному концу 38 рукоятки 1, и продольной осью L2 приемной части трубчатой части рукоятки 1 больше радиального расстояния между другим из указанных двух смежных ответных контактных элементов и продольной осью L2 приемной части. Другими словами, радиальное расстояние между ответными контактными элементами и продольной осью приемной части постоянно увеличивается в дистальном направлении рукоятки 1, т.е. при приближении ответных контактных элементов к дистальному концу 38 рукоятки 1.
Каждая печатная плата 11 рукоятки 1 имеет электрическое соединение посредством гибкого ленточного кабеля (не показан) с электронным блоком 8 (см. фиг. 2) рукоятки 1. Общее количество ответных контактных элементов 12 определяется при инженерной реализации изобретения и в основном зависит от типа выходного интерфейса, разрешения и/или максимальной разрядности шины данных видеосенсоров, используемых в видеоэндоскопических дистальных насадках 2, а также дополнительных электрических элементов, расположенных на функциональной головке, таких как светодиоды и т.п. Наиболее совершенные модели современных видеоэндоскопических дистальных насадок выдают видеосигнал с разрешением 13 мегапикселей, а бюджетные версии - с разрешением 0.3 мегапикселя, при этом миниатюрные версии сенсоров OV6211 имеют разрешение 400×400 пикселей. Например, в одном из вариантов реализации изобретения при использовании видеосенсора OV7699 производства компании OmniVision общее количество контактных элементов 12 в контактной группе 4 равно 16 (14 для видеосенсора и 2 для электропитания светодиодов), а при использовании видеосенсора Ov5670 - 44 (42 контакта для видеосенсора и 2 контакта для электропитания светодиодов).
В общем случае, минимальное количество контактных элементов видеоэндоскопической дистальной насадки 2 и рукоятки 1, т.е. их общее минимальное количество контактных пар, равно двум, с помощью которых возможна подача электропитания, например, на источник светового излучения в случае использования съемной дистальной насадки 2 для диафаноскопии. Максимальное количество контактных пар, которые можно реализовать на соединительной части насадки по настоящему изобретению, фактически не ограничено. На практике, как отмечено выше, общее количество контактных пар определяется разрешением сенсора, типом его интерфейса и наличием дополнительных функциональных элементов. Очевидно, что при практической реализации принимается во внимание сенсор с максимальным количеством контактов, которое в совокупности с требуемым количеством дополнительных контактов на элементы освещения и дополнительные элементы и определяет необходимое количество контактных пар насадки 2 и рукоятки 1.
Количество рядов 9 и 10 контактных элементов 12 не ограничивается приведенным на фиг. 6. В других вариантах реализации изобретения контактная группа 4 может содержать один или более рядов контактных элементов 12, расположенных в ряд под углом к продольной оси L2 трубчатой части рукоятки 1, составляющим величину больше 0 и меньше 90 градусов. При этом могут использоваться также сдвоенные ряды контактных элементов, т.е. контактные элементы, расположенные на одной печатной плате в двух преимущественно параллельных рядах.
Например, при необходимости размещения на видеоэндоскопической дистальной насадке 2 и рукоятке 1 по 40 контактных элементов, они могут быть размещены на двух печатных платах в одиночных рядах по 20 контактов каждый, или в сдвоенных рядах на каждой из двух печатных плат по 10 контактов в каждом ряду.
В одном из вариантов реализации количество печатных плат видеоэндоскопической дистальной насадки 2 соответствует количеству печатных плат рукоятки 1, а наклон печатных плат видеоэндоскопической дистальной насадки 2 соответствует наклону печатных плат рукоятки 1. Таким образом, при присоединении видеоэндоскопической дистальной насадки 2 к рукоятке 1 посредством вставки указанной видеоэндоскопической дистальной насадки 2 в отверстие 400 приемной части управляющего блока каждая из контактных поверхностей рядов 13, 14 контактных элементов печатных плат видеоэндоскопической дистальной насадки 2 приходит в соприкосновение с соответствующим подпружиненным контактным элементом 12 контактной группы 4 рукоятки 1. Контактные элементы 12 контактной группы 4 рукоятки 1 расположены по линии, соответствующей по форме линии расположения контактных элементов печатных плат видеоэндоскопической дистальной насадки 2. Другими словами, радиальное расстояние между контактными поверхностями контактных элементов рукоятки 1 и продольной осью трубчатой части рукоятки 1 увеличивается или уменьшается в дистальном направлении трубчатой части рукоятки 1 в соответствии с тем, уменьшается или увеличивается расстояние между контактными поверхностями контактных элементов видеоэндоскопической дистальной насадки 2 и продольной осью насадки в проксимальном направлении насадки 2. Другими словами, каждый последующий в дистальном направлении приемной части контактный элемент рукоятки 1 смещен относительно предыдущего контактного элемента в радиальном направлении наружу или внутрь в зависимости от того, внутрь или наружу в радиальном направлении смещен каждый последующий в проксимальном направлении насадки контактный элемент относительно предыдущего контактного элемента насадки 2.
Ответные контактные элементы 12 управляющего блока, изображенные на фиг. 6, расположены таким образом, что оси рядов 11 ответных контактных элементов 12 в данном варианте реализации также совпадают с образующими прямого кругового конуса, ось которого совпадает с продольной осью приемной части управляющего блока, а его вершина расположена, проксимально относительно ряда ответных контактных элементов 12. При этом телесные углы при вершинах конусов, построенных для каждого из рядов 13, 14 контактных элементов и ответных контактных элементов 12 должны быть равны для обеспечения оптимального электрического контакта между всеми соответствующими контактными элементами насадки 2 и управляющего блока.
В случае расположения контактных элементов насадки 2 по винтовой линии, она также может проходить по поверхности кругового конуса, т.е. с постоянным приближением каждого из рядов контактных элементов к оси насадки 2 в продольном направлении насадки 2. В этом случае ответные контактные элементы 12 управляющего блока также проходят по винтовой линии, которая является комплементарной к винтовой линии рядов 13, 14 контактных элементов насадки 2.
В случае расположения рядов контактных элементов на поверхности воображаемого кругового конуса, в частности, в случае совпадения рядов контактирующих контактных элементов с образующими прямого кругового конуса, обеспечивается простота присоединения насадки 2 к управляющему блоку с обеспечением надежного замыкания контактных элементов насадки 2 и управляющего блока. Посредством взаимодействующих контактных элементов насадки 2 и рукоятки 1 на насадку 2 могут передаваться управляющие сигналы с управляющего блока для управления электронными компонентами указанной насадки 2, в частности, электронными компонентами функциональной головки, а также информационные сигналы, например видеосигналы, воспринимаемые и формируемые видеоголовкой 17 насадки 2, между насадкой 2 и управляющим блоком, например, для их последующей передачи на устройство 100 отображения видеосигнала для визуального отображения результатов диагностики.
При этом, при небольших величинах телесных углов кругового конуса возможно расположение в ряд достаточно большого числа контактных элементов без существенного увеличения габаритов насадки 2, в частности диаметра насадки 2.
Кроме того, размещение контактных элементов на поверхности кругового конуса позволяет обеспечить присоединение насадки 2 к управляющему блоку медицинского диагностического прибора, а также отсоединение от него простым линейным перемещением (вставкой) насадки 2 в приемную часть управляющего блока за счет отсутствия поднутрений, а также предотвратить паразитное замыкание контактных элементов в процессе вставки насадки 2, поскольку в данном случае при вставке насадки 2 в управляющий блок соответствующие контактные элементы насадки 2 и ответные контактные элементы управляющего блока перемещаются навстречу друг другу линейно по параллельным линиям вдоль продольных осей насадки 2, а также вдоль оси приемной части управляющего блока, как показано ниже на фиг. 8. Таким образом, обеспечивается замыкание каждого из контактных элементов насадки 2 только с предназначенным ему ответным контактным элементом 12 управляющего блока, и исключается возможность их непреднамеренного контакта с другими ответными контактными элементами в процессе вставки насадки 2 в управляющий блок.
Линейность перемещения насадки 2 при ее присоединении к управляющему блоку с одновременным замыканием всех имеющихся пар контактных элементов, необходимых для передачи управляющих воздействий от управляющего блока на насадку 2 для обеспечения управления электронными компонентами насадки 2, обеспечивает возможность ее вставки в управляющий блок простым и линейным движением оператора, в том числе при помощи одной руки, что позволяет освободить вторую руку оператора для осуществления других манипуляций. Кроме того, в случае выполнения контактного элемента насадки 2, используемого для подачи электропитания на насадку 2, более коротким по сравнению с остальными контактными элементами, как будет более подробно описано ниже, может быть обеспечена возможность «горячей замены» насадки, т.е. замены одной диагностической дистальной насадки на другую без отключения электропитания от управляющего блока диагностического прибора.
При этом указанный технический результат достигается при размещении вершины кругового конуса с любой стороны от рядов 13, 14 контактных элементов, поскольку принципиальным является наличие наклона рядов 13, 14 контактных элементов насадки 2 относительно продольной оси насадки 2, т.е. смещения каждого последующего в продольном направлении насадки 2 контактного элемента относительно предыдущего контактного элемента в радиальном направлении внутрь.
На фиг. 7 изображены видеоэндоскопическая дистальная насадка 2 и рукоятка 1 в соединенном состоянии согласно одному из вариантов реализации изобретения. Каждый из контактных элементов двух рядов 9 и 10 дистальной части рукоятки 1 соединен с соответствующим контактным элементом рядов 13, 14 контактных элементов печатных плат съемной видеоэндоскопической дистальной насадки 2. Наклонное положение контактных элементов позволяет, во-первых, увеличить количество контактных элементов при меньшем внешнем диаметре видеоэндоскопической дистальной насадки 2 по сравнению с расположением контактной группы перпендикулярно к продольной оси L1 соединительной части 50 видеоэндоскопической дистальной насадки 2, во-вторых, позволяет избежать возникновения нежелательных электрических соединений и поломки подпружиненных контактных элементов при присоединении видеоэндоскопической дистальной насадки 2 к рукоятке 1, содержащих параллельное размещение рядов 9 и 10 контактных элементов.
В одном из вариантов реализации изобретения видеоэндоскопическая дистальная насадка 2 содержит направляющие средства, содержащие выступ 402, проходящий вдоль продольной оси L1 соединительной части 50 и выполненный с возможностью направления видеоэндоскопической дистальной насадки 2 при ее соединении с рукояткой 1, в которой предусмотрены ответные направляющие средства, выполненные в виде ответного паза 401, взаимодействующего с указанным выступом 402 видеоэндоскопической дистальной насадки 2 так, что выступ 402 соединительной части насадки входит в ответный паз 401 рукоятки при ее вставке в рукоятку 1. Благодаря взаимодействию паза 401 и выступа 402 при соединении съемной видеоэндоскопической дистальной насадки 2 с рукояткой 1 обеспечивается однозначная ориентация рядов контактных элементов видеоэндоскопической дистальной насадки 2 и рукоятки 1 друг напротив друга, а также соблюдение по существу равного зазора между соответствующими контактными элементами съемной видеоэндоскопической дистальной насадки 2 и контактными элементами рукоятки 1 при присоединении видеоэндоскопической дистальной насадки 2 к рукоятке 1 с обеспечением равномерного сближения и замыкания указанных контактных элементов видеоэндоскопической дистальной насадки 2 и рукоятки 1 при вставке соединительной части 50 съемной видеоэндоскопической дистальной насадки 2 в отверстие 400 рукоятки 1. В одном из вариантов реализации изобретения выступ 401 видеоэндоскопической дистальной насадки 2 расположен между рядами 13 и 14 контактных элементов видеоэндоскопической дистальной насадки 2 и проходит по всей длине соединительной части видеоэндоскопической дистальной насадки 2, а отверстие 400 рукоятки 1 содержит паз 402, расположенный на внутренней поверхности отверстия 400 и проходящий на длину соединительной части насадки 2.
Направляющие средства видеоэндоскопической дистальной насадки 2 и ответные направляющие средства рукоятки 1 в одном из вариантов реализации изобретения могут быть также обеспечены за счет выполнения по меньшей мере части сечения соединительной части 50 видеоэндоскопической дистальной насадки 2 комплементарной по меньшей мере части сечения отверстия 400 приемной части рукоятки 1, например, в форме многоугольника или сечения любой другой формы, отличной от круга, которое будет однозначным образом определять правильную ориентацию насадки 2 при ее вставке в рукоятку 1. В частности, указанные направляющие средства могут быть реализованы в виде лыски 503, выполненной на окружной поверхности соединительной части 50 насадки 2, как показано на фиг. 9, и комплементарного по форме приемной части рукоятки 1, обеспечивающих единственно возможную угловую ориентацию насадки относительно приемной части 400 при вставке насадки 2 в рукоятку 1.
Геометрические размеры, в частности, длина и угловое положение печатных плат, а также величина продольного перемещения видеоэндоскопической дистальной насадки 2 до ее фиксации защелкой рукоятки 1, выбираются по результатам проведенных экспериментов таким образом, чтобы пружина каждого ответного контактного элемента 12 рукоятки 1 была сжата при соединении и фиксации видеоэндоскопической дистальной насадки 2 в рукоятке 1 в степени, достаточной для надежного электрического соединения, компенсации возможных люфтов и исключения дребезга контактных элементов. Как показано на фиг. 8, указанная величина поджатия, т.е. величина перемещения подвижной части подпружиненных ответных контактных элементов 12 вдоль оси k0, k1 между их состоянием покоя до состояния подпружиненного контакта с контактными элементами насадки 2 при полностью вставленной видеоэндоскопической дистальной насадке 2, определяемая длиной отрезков В11А21, В10А20, составляет в практическом варианте реализации величину около 0,1-0,2 мм. Следует отметить, что величина поджатия каждого из ответных контактных элементов непосредственно влияет на величину усилия, требуемого для установки насадки в рукоятку, которая в свою очередь также зависит от угла расположения контактных элементов относительно оси соединительной части насадки. С увеличением угла наклона увеличивается величина усилия для установки насадки в рукоятку при заданной величине поджатия ответных контактных элементов.
Кроме того, размер контактных поверхностей и порядок коммутации силовых и сигнальных линий выбирается такими, чтобы обеспечить подсоединение силовых линий, т.е. линий подачи питания на видеоэндоскопическую дистальную насадку, в последнюю очередь, т.е. после соединения всех сигнальных линий, что обеспечивает возможность «горячей замены» одной насадки на другую без отключения питания управляющего блока диагностического прибора. Для этого контактные поверхности контактных элементов силовых линий питания на печатных платах видеоэндоскопической дистальной насадки 2 выполняются укороченными по сравнению с контактными поверхностями остальных контактных элементов, в частности, контактных элементов сигнальных линий.
При присоединении съемной видеоэндоскопической дистальной насадки 2 к рукоятке 1 контактные элементы видеоэндоскопической дистальной насадки 2 перемещаются вдоль продольных осей L0, L1 трубчатой части 16 и соединительной части 50 видеоэндоскопической дистальной насадки 2 и, соответственно, продольной оси L2 приемной части рукоятки 1 навстречу контактным элементам 12 рукоятки 1. В момент времени T1 (см. фиг. 8) все контактные элементы 450' насадки 2, за исключением проксимальных контактных элементов 451', одновременно приходят в соприкосновение с ответными контактными элементами 12 рукоятки 1 в точках В11, обеспечивая замыкание сигнальных линий для передачи информационных сигналов. Из-за укороченной контактной поверхности силовых контактных элементов 451' электропитания видеоэндоскопической дистальной насадки 2 силовые контактные элементы 451' видеоэндоскопической дистальной насадки 2 придут в соприкосновение с силовыми контактными элементами 451' рукоятки 1 только после того, как придут в соприкосновение все информационные контактные элементы 450' видеоэндоскопической дистальной насадки 2 со всеми ответными информационными контактными элементами 450 рукоятки 1. Т.е. электропитание на насадку 2 не будет подано, пока точка В10 проксимальных ответных контактных элементов 12 рукоятки 1 не коснется проксимальных контактных элементов 451' насадки 2, при этом в указанный момент касания точки В11 остальных ответных контактных элементов 12 рукоятки 1 уже будут находиться в надежном контакте с остальными контактными элементами 450' насадки 2.
Соединение в момент времени T1 является ненадежным из-за возможных допусков в изготовлении видеоэндоскопической дистальной насадки 2 и рукоятки 1. При дальнейшем встречном осевом перемещении видеоэндоскопической дистальной насадки 2 и рукоятки 1 подпружиненные контактные элементы поджимаются на величину В10А20, при этом точка соединения контактных элементов перемещается по контактной поверхности вдоль отрезка В20А20. В момент времени Т2, характеризующий рабочее состояние соединения видеоэндоскопической дистальной насадки 2 и рукоятки 1, в котором осуществляется фиксация насадки 2 в рукоятке 1 механизмом 5 фиксации, величина поджатия подпружиненных контактных элементов 12 больше величины возможных неровностей, что обеспечивает надежное электрическое соединение.
Таким образом, укороченная ответная контактная поверхность силовых подпружиненных контактных элементов 451' и 451 обеспечивает подачу электропитания с некоторой задержкой после соединения всех информационных контактных элементов 450' и 450, что позволяет извлекать видеоэндоскопическую дистальную насадку 2 и присоединять ее к рукоятке 1 без отключения электропитания управляющего блока медицинского диагностического прибора.
В случае использования в приемной части рукоятки 1 подпружиненных ответных контактных элементов, в зависимости от рабочей величины хода штока или величины поджатия подпружиненных контактных элементов 12 вдоль оси k0, k1 между ненагруженным состоянием и состоянием контакта с контактными элементами насадки 2, соответствующего величине отрезка В11-А21 на фиг. 8, а также величины шага контактных элементов, размера и формы их контактных поверхностей может быть рассчитан минимальный угол а наклона между линией, проходящей через центры контактных поверхностей контактных элементов, и продольной осью L1 соединительной части 50 видеоэндоскопической дистальной насадки 2, при котором будут исключены нежелательные контакты непредназначенных для контакта друг с другом контактных элементов при вставке насадки 2 в управляющий блок. Уменьшение размеров контактных поверхностей контактных элементов насадки 2 и диаметра контактных элементов управляющего блока, а также повышение точности изготовления контактных элементов насадки 2 и управляющего блока будет способствовать уменьшению указанного минимального угла а наклона контактных элементов к продольной оси насадки 2, дальнейшему уменьшению габаритов и повышению компактности насадки 2.
В другом варианте реализации настоящего изобретения съемная видеоэндоскопическая дистальная насадка 2, изображенная на фиг. 9, содержит предназначенную для осуществления манипуляций в теле пациента неуправляемую вводимую часть, выполненную в виде трубчатой части 501, расположенной на дистальном участке 42 насадки 2 и содержащей защитное окно 500 на своем дистальном конце, защитный колпачок 45 и соединительную часть 50, содержащую корпус 502 соединительной части, две печатные платы 504 и 514 (не показана), с контактными элементами 450', расположенные на проксимальном участке корпуса 502. Корпус соединительной части выполнен в виде по существу осесимметричного тела, имеющего продольную ось L1, а также горизонтальную плоскость симметрии.
Как показано более подробно на фиг. 10, контактные элементы 450' съемной видеоэндоскопической дистальной насадки 2 расположены на двух печатных платах 504, 514, расположенных обращенными в противоположные друг от друга стороны симметрично относительно продольной оси L1 соединительной части 50 и под наклоном к указанной оси L1 так, что плоскости печатных плат 504, 514 пересекают продольную ось L1 соединительной части 50 насадки 2 в одной точке, расположенной на проксимальном продолжении оси L1 (справа от соединительной части 50 насадки 2, изображенной на фиг. 9). Каждая из указанных печатных плат 504, 514 содержит по два параллельных ряда контактных элементов 450', причем каждый из рядов состоит из десяти контактных элементов, расположенных по прямой линии, и проходит под наклоном относительно продольной оси L1 соединительной части 50 видеоэндоскопической дистальной насадки 2, соответствующим наклону печатных плат 504, 514 относительно продольной оси L1 соединительной части 50. Таким образом, радиальное расстояние между контактными элементами 450' и продольной осью L1 соединительной части 50 насадки 2 постоянно уменьшается в продольном направлении насадки 2, т.е. каждый последующий в проксимальном направлении насадки 2 контактный элемент смещен относительно предыдущего контактного элемента в радиальном направлении внутрь. Продольное направление насадки 2 в данном случае совпадает с продольной осью L1 соединительной части 50.
Общее количество контактных элементов, расположенных на соединительной части 50 съемной видеоэндоскопической дистальной насадки 2 в данном варианте реализации равняется 40. Контактные элементы съемной видеоэндоскопической дистальной насадки 2 выполнены с возможностью контакта с ответными контактными элементами 510, 515 управляющего блока или рукоятки 1, расположенными в ней на печатных платах 509, 516. При этом, поверхности крайних контактных элементов 451' на печатных платах 509, 516 видеоэндоскопической дистальной насадки 2, которые используются для подачи через них силовых линий питания, выполнены укороченными по сравнению с контактными поверхностями остальных контактных элементов, которые используются для передачи сигналов. Благодаря этому, как было пояснено выше, при вставке насадки 2 в рукоятку 1 может быть обеспечена подача электропитания на электронные компоненты насадки 2 после соединения (замыкания) всех контактных пар сигнальных линий и, таким образом, может быть обеспечена возможность «горячей» замены одной дистальной насадки 2 на другую.
В одном из вариантов реализации изобретения корпус 502 соединительной части 50 на ее дистальном участке выполнен в форме кругового цилиндра с продольной осью L1 соединительной части 50, на окружной поверхности которого выполнена лыска 503, а поперечное сечение приемной части рукоятки 1 выполнено комплементарным по форме сечению дистального конца соединительной части 50 в месте расположения лыски 503, которая предназначена для обеспечения однозначной угловой ориентации съемной видеоэндоскопической дистальной насадки 2 при ее вставке в рукоятку 1. На проксимальном участке корпуса 502 соединительной части 50 выполнена также полость 505, проходящая от торцевой поверхности проксимального конца корпуса 502 внутрь корпуса 502 вдоль его продольной оси L1 или параллельно ей и предназначенная для размещения в ней выступа 512 подпружиненной защелки рукоятки 1, предназначенной для фиксации дистальной насадки 2 при ее присоединении к рукоятке 1.
Для этого в корпусе 502 перпендикулярно продольной оси полости 505 в одном из вариантов реализации расположен цилиндрический фиксирующий элемент 511, предназначенный для зацепления с выступом 512 подпружиненной защелки рукоятки 1. Элемент 511 смещен в перпендикулярном направлении относительно продольной оси полости 505 таким образом, что выступ 512 защелки в повернутом относительно рабочего положения состоянии выполнен с возможностью беспрепятственного перемещения вдоль продольной оси полости 505, обеспечивая таким образом возможность извлечения съемной видеоэндоскопической дистальной насадки 2 из рукоятки 1. Извлечение насадки 2 из рукоятки 1 осуществляется при приведение в действие средств извлечения (не показаны), расположенных на рукоятке 1, для передачи известным образом механического воздействия на выступ 512 защелки для его отклонения от рабочего (фиксирующего) положения и высвобождения, таким образом, насадки 2 для ее извлечения из рукоятки 1.
Форма и размеры выступа 512 защелки рукоятки 1 и фиксирующего элемента 511 насадки 2 выбираются такими, чтобы в состоянии фиксации соединительной части 50 насадки 2 в приемном отверстии рукоятки 1 обеспечивался надежный контакт между контактными элементами 450 насадки 2 и ответными контактными элементами 510, 515 рукоятки 1 с обеспечением необходимой величины поджатия В11-А21 штоков подпружиненных контактных элементов 12, как показано на фиг. 8.
Корпус 502 соединительной части 50 содержит функциональную головку, содержащую оптико-электронный модуль 506, который через гибкий ленточный кабель 507 электрически соединен с печатной платой 508, содержащей электронные компоненты, необходимые для правильного функционирования оптико-электронного модуля 506, и, через гибкие ленточные кабели 513, соединен с печатными платами 504 и 514. Функциональная головка также содержит источники 520 излучения, расположенные в непосредственной близости от оптико-электронного модуля 506 и предназначенные для генерации оптического излучения, используемого для освещения исследуемой области. Оптико-электронный модуль 506 функциональной головки предназначен для приема оптического излучения или сигнала, отраженного от исследуемого объекта, его преобразования и формирования на его основании видеосигнала высокого разрешения, а также передачи указанного видеосигнала высокого разрешения на устройство 100 отображения видеосигнала медицинского диагностического прибора.
Кроме того, в трубчатой части 501 насадки и корпусе 502 соединительной части 50 размещены элементы двухканальной оптической системы съемной видеоэндоскопической дистальной насадки 2, представленные на фиг. 11 и фиг. 12.
Первый канал оптической системы дистальной насадки 2 является осветительным каналом, представляющим собой световод 521 и предназначенным для передачи света определенной части или частей видимого спектра, а для некоторых видов эндоскопических обследований - также для передачи инфракрасного и/или ультрафиолетового излучения, от источников 520 излучения, расположенных в корпусе 502 соединительной части 50 насадки 2, до защитного окна 500, расположенного на дистальном конце трубчатой части 501 насадки 2, для освещения через него исследуемой области. Защитное окно может представлять собой как плоский элемент, не преломляющий световое излучение, там и представлять собой оптическую линзу. Спектральный состав излучения, передаваемого по первому каналу, зависит от специфики проводимого эндоскопического обследования. На проксимальном конце первого канала расположена печатная плата 519 с размещенным на ней источниками 520 излучения, в частности света, которая электрически соединена с печатной платой 508, на которой размещены электронные компоненты, например драйверы светодиодов, необходимые для функционирования источников 520 излучения. В качестве источников света в одном из вариантов реализации используются светодиоды. Передача света от источников 520 излучения до дистального конца трубчатой части 501 осуществляется по световоду 521, в качестве которого в одном из вариантов реализации используется оптоволокно или световодный жгут. Для оптического согласования (стыковки) источников 520 излучения и световода 521 используется согласующий оптический элемент (соединитель) 518, в качестве которого, например, используются фокусирующие граданы. Количество и тип световодов 521, источников 520 излучения и соединителей 518, а также их физических параметров, определяется на этапе инженерной реализации изобретения и зависит от специфики эндоскопического обследования, для которого предназначена съемная видеоэндоскопическая дистальная насадка 2.
Второй канал оптической системы дистальной насадки 2 является оптическим информационным каналом 517 и предназначен для передачи отраженного обследуемым объектом света, проходящего через защитное окно 500, расположенное на дистальном конце трубчатой части 501, от защитного окна 500 до приемника светового излучения и оптико-электронного модуля 506, размещенных в корпусе 502. Техническая реализация оптического информационного канала известна и определяется, в основном, диаметром и длиной трубчатой части 501 и может быть осуществлена, например, с использованием линзовых (оборачивающих) систем, градиентных стержневых линз, называемых также граданами, GRIN линз, одножильного световода, световодного жгута с регулярной укладкой волокон или комбинации вышеперечисленных компонентов или иным способом, известным на момент реализации изобретения.
На дистальном конце (объективе) информационного канала 517 и осветительного канала, состоящего из световодов 521, в одном из вариантов реализации размещены линзовые элементы, градиентные оптические элементы и/или призмы, осуществляющие преобразование отраженного от исследуемой области света для обеспечения необходимых углов и направлений обзора. В одном из вариантом реализации функцию линзы может выполнять само защитное окно 500, которое может быть изготовлено из любого пропускающего свет, в частности, полимерного материала.
Благодаря расположению функциональной головки в корпусе 502 соединительной части 50, имеющей существенно больший диаметр, чем диаметр трубчатой части 501 дистальной насадки 2, обеспечена возможность размещения в указанной соединительной части источников излучения большей мощности или разного спектрального состава и оптико-электронного модуля с системой линз и светочувствительной матрицы большего диаметра для приема и передачи изображения с высокой разрешающей способностью, в частности, равной или большей 4 К, позволяющей обеспечивать отображение исследуемой области с разрешением до 4096×3072 пикселей и выше.
При размещении функциональной головки с оптико-электронным модулем непосредственно на дистальном конце трубчатой части 501 дистальной насадки 2, например в варианте реализации насадки 2, показанном на фиг. 3, диаметр размещаемых в ней линз ограничен ее диаметром, который задается анатомическими особенностями обследуемой области тела пациента, и который для некоторых исследований не должен превышать 2 мм. В отличие от этого, диаметр соединительной части может иметь величину от 10 до 20 мм, в одном из вариантов реализации от 10 до 15 мм, что позволяет обеспечить возможность размещения в указанной соединительной части источников излучения большей мощности и светочувствительной матрицы большего диаметра.
На фиг. 13 изображена управляемая съемная видеоэндоскопическая дистальная насадка 2 по настоящему изобретению, которая в отличие от описанных выше вариантов реализации имеет расположенный на ней модуль 21 управления, позволяющий создание управляющих механических воздействий для управления геометрической формой, в частности, изгибом управляемого участка 20 трубчатой части 16 насадки.
В данном варианте реализации изобретения управляемая съемная видеоэндоскопическая дистальная насадка 2 выполнена в виде комбинации по существу цилиндрических тел различных диаметров и степени жесткости и соединительной части 50, выполненной с возможностью разъемного соединения видеоэндоскопической дистальной насадки 2 с рукояткой 1 видеоэндоскопа и имеющих общую продольную ось L3 симметрии.
В одном из вариантов реализации изобретения управляемая съемная видеоэндоскопическая дистальная насадка 2 содержит соединительную часть 50, расположенную на проксимальном участке 43 указанной видеоэндоскопической дистальной насадки 2, неуправляемый трубчатый участок, выполненный в виде жесткой трубчатой части 16, расположенной на дистальном участке 42 насадки 2, управляемый гибкий дистальный участок 20, расположенный на дистальном конце трубчатой части 16, функциональную головку, представляющую собой видеоголовку 17, и манипулятор или модуль 21 управления съемной видеоэндоскопической дистальной насадкой 2, соединенный с трубчатой частью 16 и соединительной частью, и выполненный с возможностью управления управляемым участком 20. Трубчатая часть 16 может быть выполнена как жесткой, например, из металла, так и упругой, например, из силиконовой резины. Соединительная часть содержит печатную плату 13 с расположенными на ней контактными элементами, предназначенными для соединения с ответными контактными элементами рукоятки 1 видеоэндоскопа и описанными более подробно выше в отношении вариантов реализации съемной насадки 2, представленных на фиг. 1-12.
В одном из вариантов реализации управляемой съемной дистальной насадки медицинского диагностического прибора по настоящему изобретению модуль 21 управления видеоэндоскопической дистальной насадкой 2, изображенный на фиг. 14, содержит корпус, содержащий орган 24 управления, и механизм управления, расположенный внутри корпуса, при этом указанный механизм управления выполнен с возможностью механического воздействия на управляемый участок 20 для изменения геометрической формы управляемого участка 20 посредством передачи механического воздействия с органа 24 управления на указанный механизм управления. Орган 24 управления имеет в данном варианте реализации по существу цилиндрическую форму с расположенными на его периферической поверхности продольными углублениями, облегчающими захват и поворот органа 24 управления оператором при управлении видеоэндоскопической дистальной насадкой 2. В других вариантах реализации орган 24 управления может иметь форму, отличную от цилиндрической, например, может иметь в сечении форму многоугольника, обеспечивающую удобство вращения органа 24 управления оператором при управлении геометрической формой управляемого участка 20 видеоэндоскопической дистальной насадки 2.
Модуль 21 управления видеоэндоскопической дистальной насадкой 2 механически связан с управляемым участком 20 таким образом, что при вращении его органа или органов управления управляемый участок 20 трубчатой части 16 изменяет свою геометрическую форму, т.е. изгибается в одной плоскости в ту или иную сторону в зависимости от направления вращения цилиндрического органа 24 управления. Максимальный угол изгиба и направление изгиба управляемого участка 20 определяется спецификой медицинских обследований, которые проводятся с использованием видеоэндоскопической дистальной насадки 2 данного типа.
В одном из вариантов реализации изобретения корпус механизма управления модуля 21 управления съемной управляемой видеоэндоскопической дистальной насадкой 2 содержит дистальную стенку 22 корпуса модуля 21 управления дистальной насадкой, проксимальную стенку 23 корпуса модуля 21 управления дистальной насадкой 2, тяги 204, 205 управления изгибом управляемого участка 20, барабан 25 для тяг, неподвижную направляющую 27 для тяг, механизм фиксации формы управляемого участка 20, содержащий пружину 28, первый поворотный фрикционный элемент 29, второй поворотный фрикционный элемент 30 и неподвижный фрикционный элемент 31, шпонку 32 для передачи вращения от цилиндрического органа 24 управления к барабану 25, шпонку 33 для передачи линейного перемещения цилиндрического органа 24 управления к первому поворотному фрикционному элементу 29 фиксации формы управляемого участка 20.
Дистальная стенка 22 и проксимальная стенка 23 неподвижно закреплены на проксимальном продолжении трубчатой части 16. К проксимальной стенке 23 примыкает и неподвижно присоединена к ней соединительная часть 50, предназначенная для присоединения съемной управляемой видеоэндоскопической дистальной насадки 2 к управляющему блоку или рукоятке медицинского диагностического прибора. Таким образом, трубчатая часть 16, дистальная стенка 22 и проксимальная стенка 23 образуют неразъемное жесткое тело. Между дистальной стенкой 22 и проксимальной стенкой 23 размещен полый цилиндрический орган 24 управления, который выполнен с возможностью поворота вокруг продольной оси L3 управляемой видеоэндоскопической дистальной насадки 2 и перемещения вдоль этой оси. С цилиндрическим органом 24 управления через шпонку 33 жестко связан первый поворотный фрикционный элемент 29, который одновременно с цилиндрическим органом 24 управления может совершать поворот вокруг продольной оси L3 видеоэндоскопической дистальной насадки 2 и перемещаться в осевом направлении вдоль проксимального продолжения трубчатой части 16. В первом поворотном фрикционном элементе 29 выполнены сквозные вырезы, через которые проходят тяги 204, 205 от управляемого участка 20 до барабана 25, выполненного с возможностью вращения вокруг продольной оси L3 видеоэндоскопической дистальной насадки 2. Размер вырезов выбран таким, чтобы при своем вращении первый поворотный фрикционный элемент 29 не препятствовал перемещению тяг 204, 205. В частности, тяги 204, 205 расположены с зазором относительно внутренней поверхности вырезов первого поворотного фрикционного элемента 29. С дистальной стороны к первому поворотному фрикционному элементу 29 неподвижно присоединен второй поворотный фрикционный элемент 30 таким образом, что если пользователь не удерживает цилиндрический орган 24 управления, то второй поворотный фрикционный элемент 30 под действием пружины 28 прижат к неподвижному фрикционному элементу 31, который неподвижно закреплен на дистальной стенке 22. Во втором поворотном фрикционном элементе 30 и неподвижном фрикционном элементе 31 выполнены сквозные вырезы (не показаны) для тяг 204, 205. Таким образом, цилиндрический орган 24 управления, шпонка 33, первый поворотный фрикционный элемент 29 и второй поворотный фрикционный элемент 30 жестко связаны, совершают одновременные перемещение и поворот и находятся под сжимающим усилием пружины 28. При нахождении цилиндрического органа 24 управления в свободном состоянии, т.е. при отсутствии управления им со стороны пользователя, из-за сил трения между вторым поворотным фрикционным элементом 30 и неподвижным фрикционным элементом 31 указанные элементы предотвращают поворот цилиндрического органа 24 управления относительно своей продольной оси.
Через шпонку 32 поворот цилиндрического органа 24 управления передается барабану 25, на котором закреплены проксимальные концы двух тяг 204, 205. При вращении барабана 25 одна из тяг наматывается на поверхность барабана, а вторая, соответственно, сматывается, т.е. освобождается. При изменении направления поворота барабана 25 также меняется направление перемещения обеих тяг 204, 205. Благодаря пазам в цилиндрическом органе 24 управления, перемещение цилиндрического органа 24 управления вдоль его оси на барабан 25 не передается. Наличие барабана обеспечивает линейную зависимость между углом его поворота и величиной перемещения тяг 204, 205.
Пользователь осуществляет управление формой или изгибом управляемого участка 20 съемной управляемой видеоэндоскопической дистальной насадки 2 следующим образом: сначала он перемещает цилиндрический орган 24 управления в проксимальном направлении видеоэндоскопической дистальной насадки 2, выводя второй поворотный фрикционный элемент 30 из соприкосновения с неподвижным фрикционным элементом 31. Затем, удерживая цилиндрический орган 24 управления в смещенном состоянии, он поворачивает цилиндрический орган 24 управления, при этом поворот передается через шпонку 32 на барабан 25, и тяги 204, 205 приводятся в движение. После достижения необходимого положения, т.е. изгиба управляемого участка 20 видеоэндоскопической дистальной насадки 2 на нужный угол в требуемом направлении, пользователь освобождает цилиндрический орган 24 управления, и под действием пружины 28 он перемещается в дистальном направлении, при этом второй поворотный фрикционный элемент 30 приходит в соприкосновение с неподвижным фрикционным элементом 31, предотвращая нежелательный поворот цилиндрического органа 24 управления из-за натяжения тяг 204, 205, вызванных силами упругости управляемого участка 20.
В одном из вариантов реализации управляемая съемная видеоэндоскопическая дистальная насадка 2 может содержать идентификационную радиочастотную метку и необходимые электронные компоненты (не показаны) для радиочастотной идентификации, например NFC-антенну, которые размещены на трубчатой части 16 под дистальной стенкой 22 аналогично варианту реализации, показанному на фиг. 4.
В другом из вариантов реализации изобретения, механизм управления модуля управления съемной управляемой видеоэндоскопической дистальной насадкой, изображенный на фиг. 15, содержит дистальную стенку 22 корпуса модуля управления дистальной насадкой, проксимальную стенку 23 корпуса модуля управления дистальной насадкой, цилиндрический полый элемент 134 с двумя резьбовыми участками с левой и правой резьбой, цилиндрическую гайку 135 с выступом (не показан) и правой резьбой, цилиндрическую гайку 136 с выступом 139 и левой резьбой, диск 138 для передачи вращения от цилиндрического органа 24 управления к цилиндрическому полому элементу 134, шпонку 137, соединяющую цилиндрический орган 24 управления с диском 138, две тяги, одна из которых обозначена позицией 140, а вторая тяга, симметричная тяге 140 и расположенная на противоположной стороне цилиндрического полого элемента 134, не отображена, неподвижный цилиндрический элемент 141 с вырезами для выступов гаек 135 и 136, служащими в качестве направляющих, и неподвижный направляющий диск 142 с отверстиями для тяг.
Дистальная стенка 22 и проксимальная стенка 23 неподвижно закреплены на проксимальном продолжении трубчатой части 16. К проксимальной стенке 23 примыкает и неподвижно присоединена к ней соединительная часть 50, расположенная на проксимальном участке 43 управляемой видеоэндоскопической дистальной насадки 2 и содержащая печатную плату с контактными элементами. Таким образом, трубчатая часть 16, дистальная стенка 22 и проксимальная стенка 23 образуют неразъемное жесткое тело. Между дистальной стенкой 22 и проксимальной стенкой 23 размещен полый цилиндрический орган 24 управления, который выполнен с возможностью поворота вокруг своей продольной оси. На продолжении трубчатой части 16 в проксимальном направлении соосно с ним размещен цилиндрический полый элемент 134 с двумя резьбовыми участками с левой и правой резьбой. Цилиндрический полый элемент 134 выполнен с возможностью поворота вокруг продольной оси L3 видеоэндоскопической дистальной насадки 2. К цилиндрическому полому элементу 134 жестко присоединен диск 138, который через шпонку 137 жестко соединен с цилиндрическим органом 24 управления. Таким образом, цилиндрический орган 24 управления, диск 138 и цилиндрический полый элемент 134 с резьбой образуют жестко соединенное составное тело и могут совершать поворот одновременно.
На резьбовых участках цилиндрического полого элемента 134 размещены гайки 136 и 135 с соответственно левой и правой резьбой. Гайки 135 и 136 имеют прямоугольные выступы, выступающие в вырезы неподвижного цилиндрического элемента 141. Таким образом, поворот цилиндрического полого элемента 134 приводит к перемещению гаек 135 и 136, удерживаемых от проворачивания соответствующими выступами, и цилиндрического элемента 141 в осевом направлении. К выступам гаек 136 и 135 присоединены проксимальные концы тяги 140 и симметричной ей тяги, расположенной на противоположной стороне цилиндрического полого элемента 134. Через отверстия в неподвижном направляющем диске 142 тяги соединяются с управляемым участком 20.
Пользователь осуществляет управление управляемым участком 20 видеоэндоскопической дистальной насадки 2 следующим образом: сначала он поворачивает цилиндрический орган 24 управления. Одновременно с поворотом цилиндрического органа 24 управления поворачивается цилиндрический полый элемент 134, и гайки 135 и 136 перемещаются в осевом направлении, что приводит к натяжению одной из тяг и ослаблению другой. Изменение направления поворота цилиндрического органа 24 управления меняет направление перемещения тяг на противоположное.
Длина резьбовой части цилиндрического полого элемента 134 определяет амплитуду перемещения управляемого участка 20, а шаг резьбы определяет чувствительность управления управляемым участком 20. Кроме того, шаг резьбы выбирается таким, чтобы обеспечить необратимость, т.е. невозможность обратного поворота цилиндрического полого элемента 134 под действием сил упругости управляемого участка 20.
В одном из вариантов реализации изобретения управляемый участок 20 съемной управляемой видеоэндоскопической дистальной насадки 2, изображенный на фиг. 16, содержит крепежный элемент 203, первую тягу 204, вторую тягу 205, ребро 206 жесткости, гибкий ленточный кабель 207, проходящий к видеоголовке, цилиндрическое тело 208 и трубчатую оболочку 209.
На дистальной части управляемого участка 20 видеоэндоскопической дистальной насадки 2 расположена видеоголовка 17 функциональной головки. В одном из вариантов реализации изобретения, видеоголовка 17 содержит защитное окно 201, корпус 200 видеоголовки 17 и оптико-электронный модуль 202, содержащий видеосенсор и другие электронные компоненты, например светодиоды освещения и оптические элементы. Состав и расположение элементов оптико-электронного модуля определяется на этапе инженерной реализации изобретения.
Цилиндрическое тело 208 выполнено монолитным из упругого материала, например силиконовой резины. Продольная ось цилиндрического тела 208 совпадает с продольной осью управляемого участка 20. К дистальному концу цилиндрического тела 208, выполненному плоским, примыкает жесткий по существу цилиндрический крепежный элемент 203, в котором выполнен паз для прохода токопроводящих элементов, например проводов или гибкой печатной платы, от гибкого кабеля 207 к оптико-электронному модулю 202 функциональной головки.
К крепежному элементу 203 присоединены дистальные концы тяг 204 и 205 и дистальный конец ребра 206 жесткости. Таким образом, крепежный элемент 203 своим проксимальным концом примыкает к дистальному плоскому концу цилиндрического тела 208 и механически соединяет тяги 204, 205 и ребро 206 жесткости. Проксимальные концы тяг 204 и 205 соединены с барабаном 25 модуля 21 управления. Тяги 204 и 205 расположены в плоскости изгиба управляемого участка 20.
По гибкому ленточному кабелю 207 осуществляется электропитание оптико-электронного модуля 202 и осуществляется информационный обмен, например обмен информацией и/или сигналами управления между электронным блоком и оптико-электронным модулем 202. Проксимальный конец гибкого ленточного кабеля 207 соединен с контактными элементами печатной платы видеоэндоскопической дистальной насадки 2 или, при необходимости, с печатной платой с дополнительными электронными компонентами (не показаны). Свободный проксимальный конец ребра жесткости размещается в зоне соединения трубчатой части 16 и управляемого участка 20.
Тяги 204 и 205 размещены максимально близко к внешней поверхности цилиндрического тела 208, в котором для их размещения выполнены продольные выемки (не показаны) соответствующего размера.
Гибкий ленточный кабель 207 изогнут в виде спирали вокруг цилиндрического тела 208 вдоль его продольной оси и размещен на его наружной поверхности таким образом, что гибкий ленточный кабель 207 удерживает тяги 204 и 205 в продольных выемках цилиндрического тела 208, но не препятствует их продольному перемещению. Таким образом, стенки продольных выемок цилиндрического тела 208, в которых размещены тяги 204 и 205 и гибкий ленточный кабель 207, ограничивают поперечное перемещение тяг, но не препятствуют их продольному перемещению, образуя, таким образом, направляющие для продольного перемещения тяг 204, 205.
С внешней стороны цилиндрического тела 208 с размещенным на нем гибким ленточным кабелем расположена трубчатая эластичная оболочка 209, которая герметично соединена с корпусом 200 видеоголовки и трубчатой частью 16.
На фиг. 17 представлен аксонометрический вид управляемого участка без цилиндрического тела, трубчатой оболочки и корпуса видеоголовки 17, а на фиг. 18А, 18Б представлен аксонометрический вид управляемого участка без цилиндрического тела, трубчатой оболочки, гибкого ленточного кабеля и видеоголовки 17, на которых изображены крепежный элемент 203 с присоединенными к нему дистальными концами тяг 204 и 205 и дистальный конец ребра 206 жесткости, окруженные гибким ленточным кабелем 207.
В одном из вариантов реализации изобретения тяги 204 и 205 выполнены из мягкого материала, например полимерной нити, таким образом, что при изгибе управляемого участка 20 только одна тяга осуществляет его деформацию, а вторая находится в свободном состоянии.
В одном из вариантов реализации изобретения, трубчатая оболочка 209 не имеет жесткого соединения с цилиндрическим телом 208 и гибким ленточным кабелем 207. Таким образом, при изгибе управляемого участка 20 трубчатая оболочка 209 может растягиваться и сжиматься.
В одном из вариантов реализации изобретения, трубчатая оболочка 209 неподвижно соединена с цилиндрическим телом 208 и гибким ленточным кабелем 207, например при помощи клеевых составов или в процессе изготовления упругих элементов управляемого участка 20, таких как трубчатая оболочка 209 и цилиндрическое тело 208, в виде одного монолитного тела, например при их одновременном изготовлении, например отливке из силикона.
Предпочтительный способ соединения цилиндрического тела 208 и трубчатой оболочки 209 определяется диаметром и длиной требуемого управляемого участка 20, свойствами материалов, из которых они изготовлены, например их жесткостью, способностью к сжатию и растяжению, и выбирается при реализации изобретения.
Управление управляемым участком 20 съемной управляемой видеоэндоскопической дистальной насадки 2 происходит следующим образом. Для изгиба управляемого участка 20 пользователь при помощи цилиндрического органа 24 управления перемещает одну из тяг, «нагруженную» в продольном направлении, сокращая ее рабочую длину. Вторая тяга «свободная» при этом освобождается, и ее длина увеличивается. В результате уменьшения длины «нагруженной» тяги через крепежный элемент 203 на одну из сторон цилиндрического тела 208 действует сила сжатия, которая, приводит к его деформации (изгибу) в направлении «нагруженной» тяги. Если «свободная» тяга выполнена из жесткого материала, в зависимости от варианта реализации изобретения, то на одну из сторон цилиндрического тела 208 дополнительно действует сила растяжения. Вращая цилиндрический орган 24 управления в разные стороны, пользователь выбирает направление и величину изгиба управляемого участка 20.
При изгибе цилиндрического тела 208 «нагруженная» тяга стремится выйти за пределы поверхности управляемого участка 20, заняв положение по прямой, соединяющей дистальный и проксимальный концы управляемого участка 20, что может привести к нарушению целостности трубчатой оболочки и выходу эндоскопа из строя. Этому препятствует спиралевидный гибкий ленточный кабель 207, расположенный на внешней поверхности цилиндрического тела 208, ограничивающий перемещение тяг в направлении, перпендикулярном к продольной оси L3 дистальной насадки.
Для предотвращения отклонения изогнутого управляемого участка 20 не в плоскости управления используется ребро 206 жесткости, представляющее собой пластину из упругого материала, для которого сила сопротивления кручению существенно выше силы сопротивления изгибу.
Несмотря на то, что съемная видеоэндоскопическая дистальная насадка 2 и медицинский диагностический прибор по настоящему изобретению были описаны на примере видеоэндоскопа со съемной насадкой, содержащей видеоголовку, настоящее изобретение может быть также использовано для различных видов медицинских диагностических приборов, например для диафаноскопа, приборов для флуоресцентной эндоскопии, ультразвуковой эндоскопии, 3d-эндоскопии, лазерной эндоскопической хирургии и высокочастотной хирургии.
В случае применения для высокочастотной хирургии функциональная головка дистальной насадки может содержать электрод электрохирургического инструмента. В одном из вариантов реализации функциональная головка может содержать видеосенсор и электрод электрохирургического инструмента для обеспечения визуального эндоскопического контроля при хирургическом вмешательстве.
В случае применения для лазерной эндоскопической хирургии функциональная головка может содержать источник лазерного излучения.
В случае применения для прибора ультразвуковой эндоскопии функциональная головка дистальной насадки может содержать ультразвуковой излучатель.
В случае применения для проведения различных специальных видеоэндоскопических обследований, таких как, например, ИК-видеоэндоскопия, флуоресцентная диагностика или узкоспектральная эндоскопия (Narrow Band Imaging, NBI), функциональная головка дистальной насадки 2 может содержать в различной комбинации источники инфракрасного излучения, ультрафиолетового излучения и/или излучения синего, зеленого и/или других цветов. Состав источников излучения определяется реализуемым дистальной насадкой 2 методом эндоскопической диагностики.
В случае применения для диафаноскопии функциональная головка дистальной насадки 2 может содержать только источник видимого света.
В случае применения для 3d видеоэндоскопа функциональная головка дистальной насадки может содержать два видеосенсора.
В настоящем описании изобретение было описано на примере вариантов реализации, которые не должны рассматриваться как ограничивающие объем охраны настоящего изобретения. Для специалиста очевидно, что возможны изменения и модификации заявленных предметов изобретений без выхода за рамки и объем настоящего изобретения, который определяется приложенной формулой изобретения. Как было отмечено выше, съемная дистальная насадка, управляющий блок и медицинский диагностический прибор по настоящему изобретению, а также способ использования такого прибора могут быть с успехом использованы в различных областях, таких как диафаноскопия, флуоресцентная эндоскопия, ультразвуковая эндоскопия, лазерная эндоскопическая хирургия, 3d-эндоскопия и высокочастотная хирургия.
В частности, настоящее изобретение может быть использовано для создания медицинских диагностических комплексов, в состав которых входят одна рукоятка или управляющий блок и несколько съемных одноразовых дистальных насадок с одинаковыми или различными характеристиками, такими как управляемость, жесткость и геометрические размеры вводимой в полость тела части дистальной насадки, наличие органов управления дистальным концом, разрешение и угол обзора видеосенсора и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКИЙ ДИАГНОСТИЧЕСКИЙ ПРИБОР СО СЪЕМНЫМИ ДИСТАЛЬНЫМИ НАСАДКАМИ | 2017 |
|
RU2678409C2 |
| РАЗЪЕМ ДЛЯ МЕДИЦИНСКОГО ДИАГНОСТИЧЕСКОГО ПРИБОРА | 2017 |
|
RU2680125C2 |
| МОДУЛЬНАЯ ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2662277C2 |
| МОДУЛЬНАЯ ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2666261C2 |
| МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС РАЗЪЕМНОГО УПРАВЛЯЕМОГО ЭНДОСКОПА | 2018 |
|
RU2728186C2 |
| СПОСОБЫ И АППАРАТ ДЛЯ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ УХА, ГОРЛА, НОСА | 2009 |
|
RU2506056C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2559922C1 |
| ДВОЙНАЯ ПЕТЛЯ С ОДИНАРНЫМ УПРАВЛЯЮЩИМ ПРОВОДОМ ДЛЯ ДВУХСТОРОННЕГО ДЕЙСТВИЯ | 2013 |
|
RU2636180C2 |
| СИЛОИЗМЕРИТЕЛЬНЫЙ КАТЕТЕР С ПРИСОЕДИНЕННОЙ ЦЕНТРАЛЬНОЙ РАСПОРКОЙ | 2009 |
|
RU2506965C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С КОМПАКТНЫМИ СРЕДСТВАМИ УПРАВЛЕНИЯ ШАРНИРНЫМ СОЕДИНЕНИЕМ | 2011 |
|
RU2599335C2 |
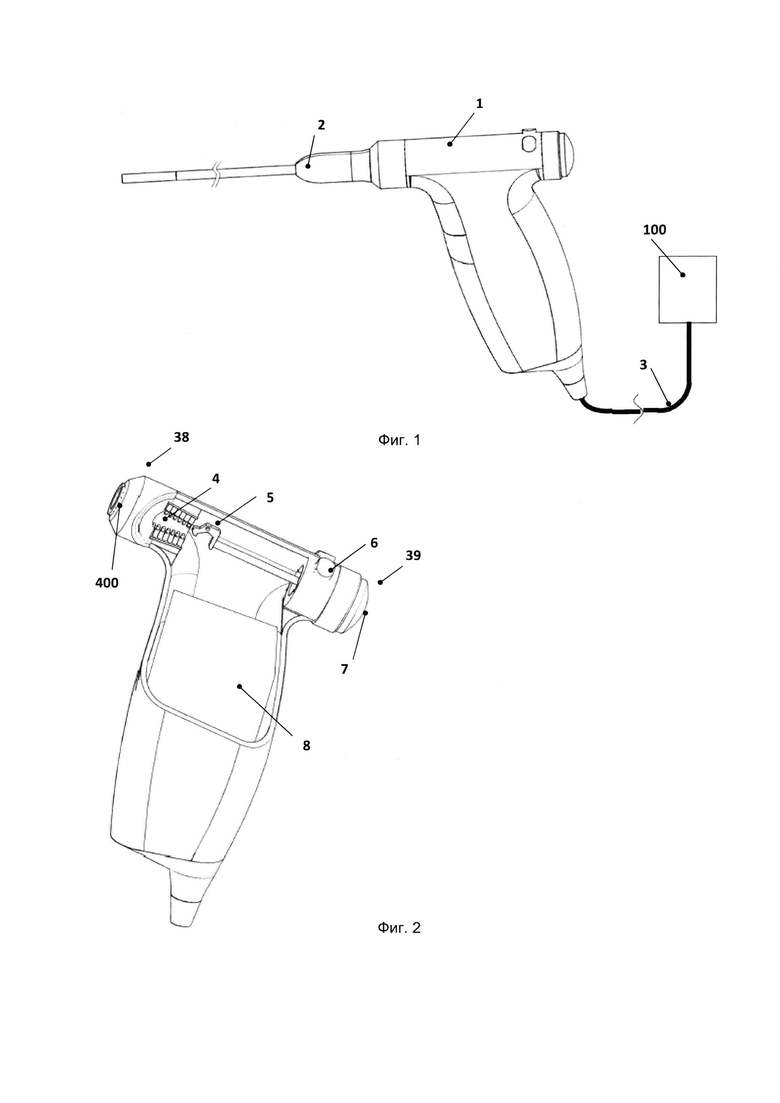
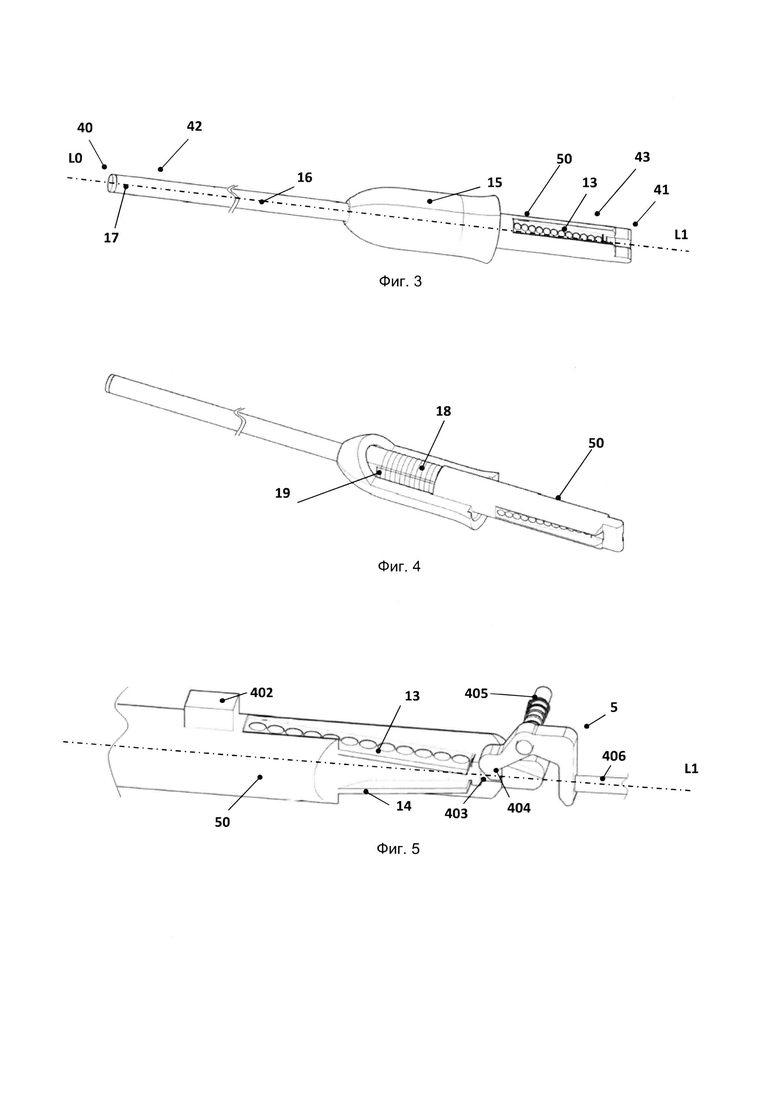

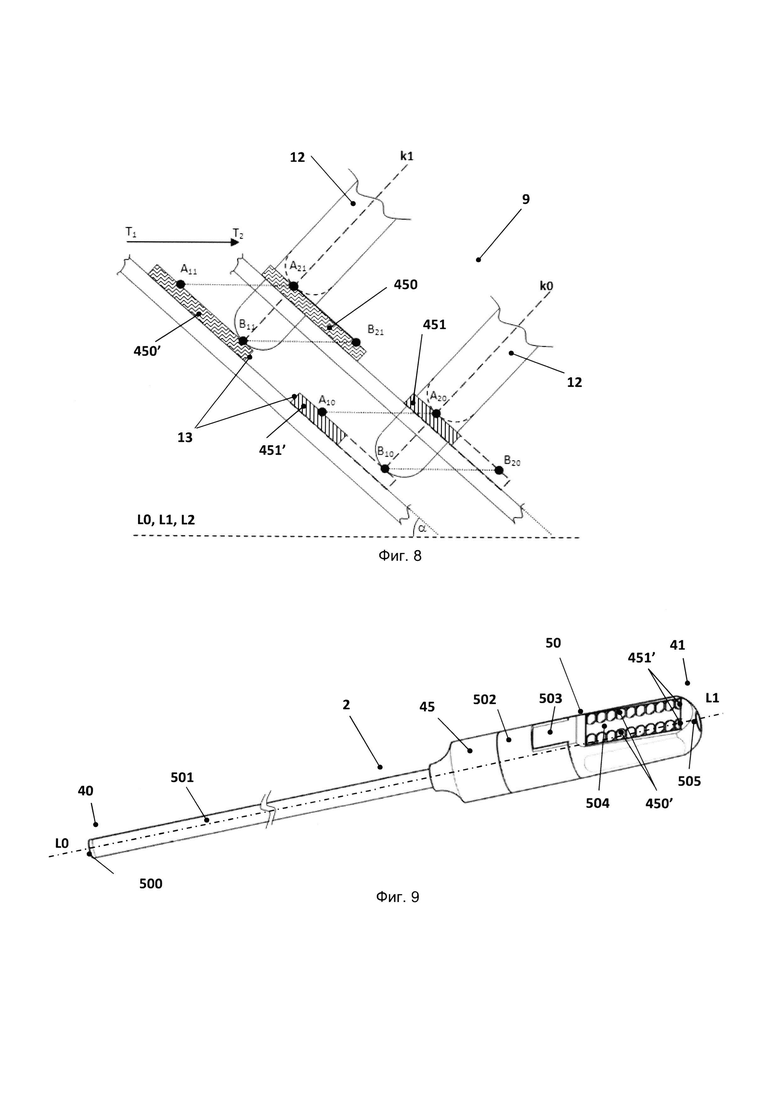
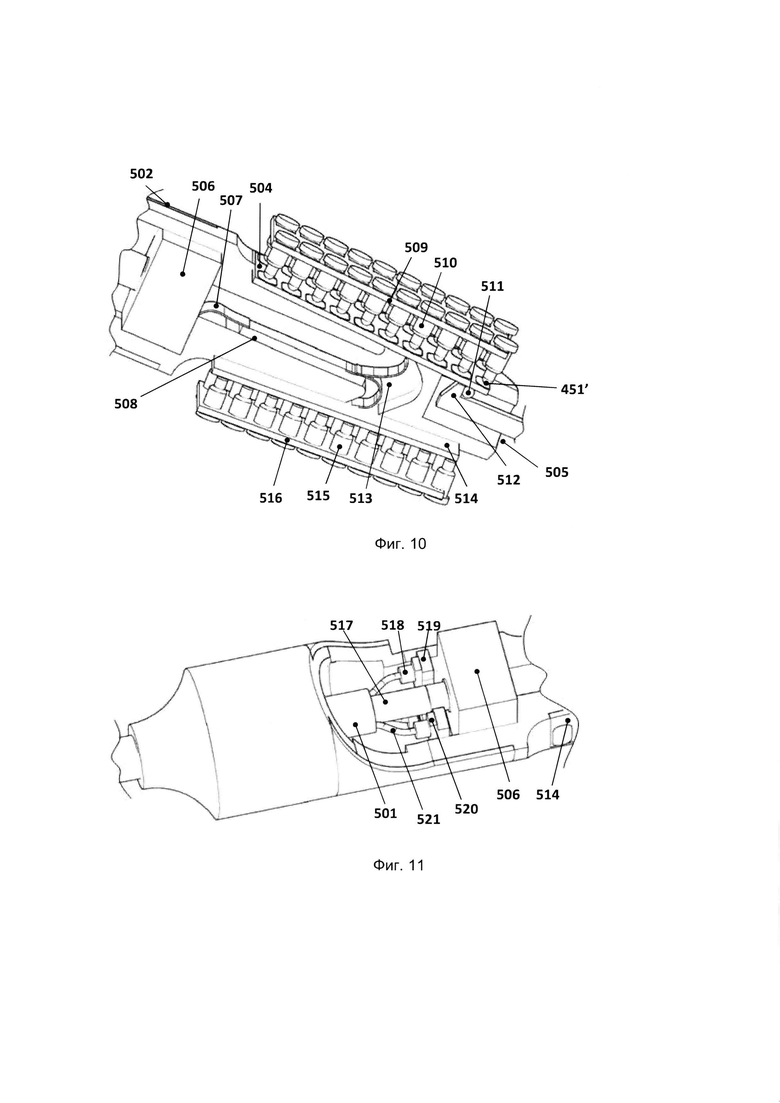
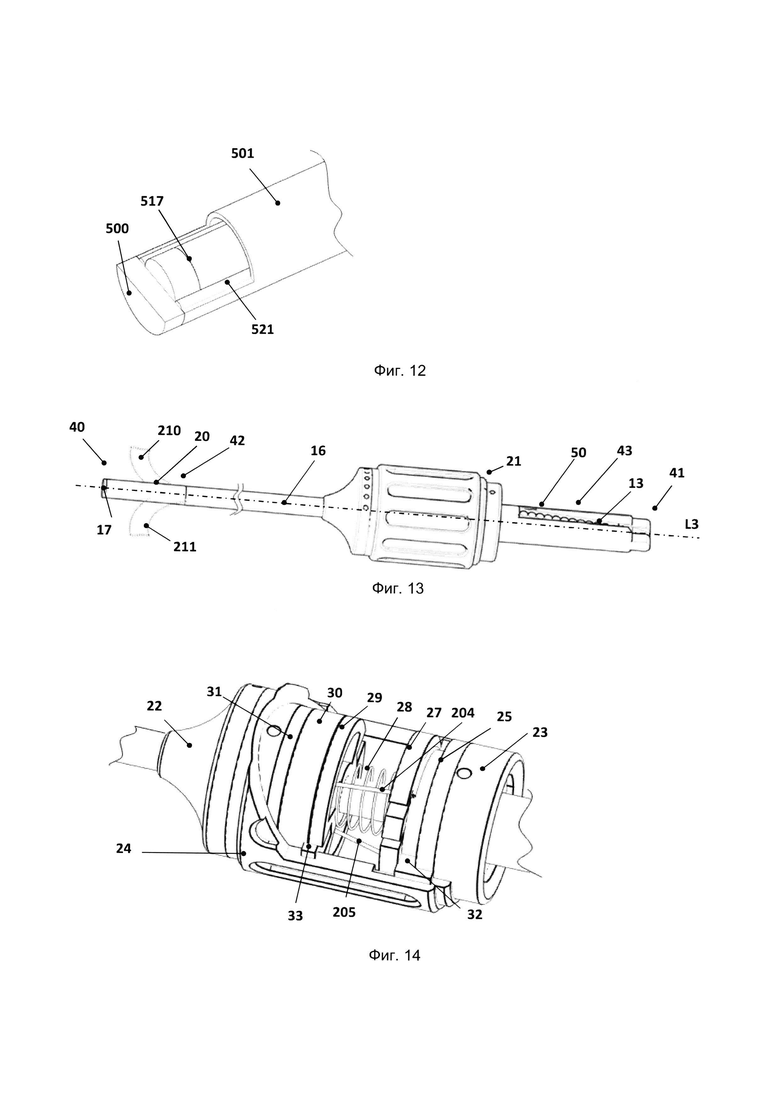
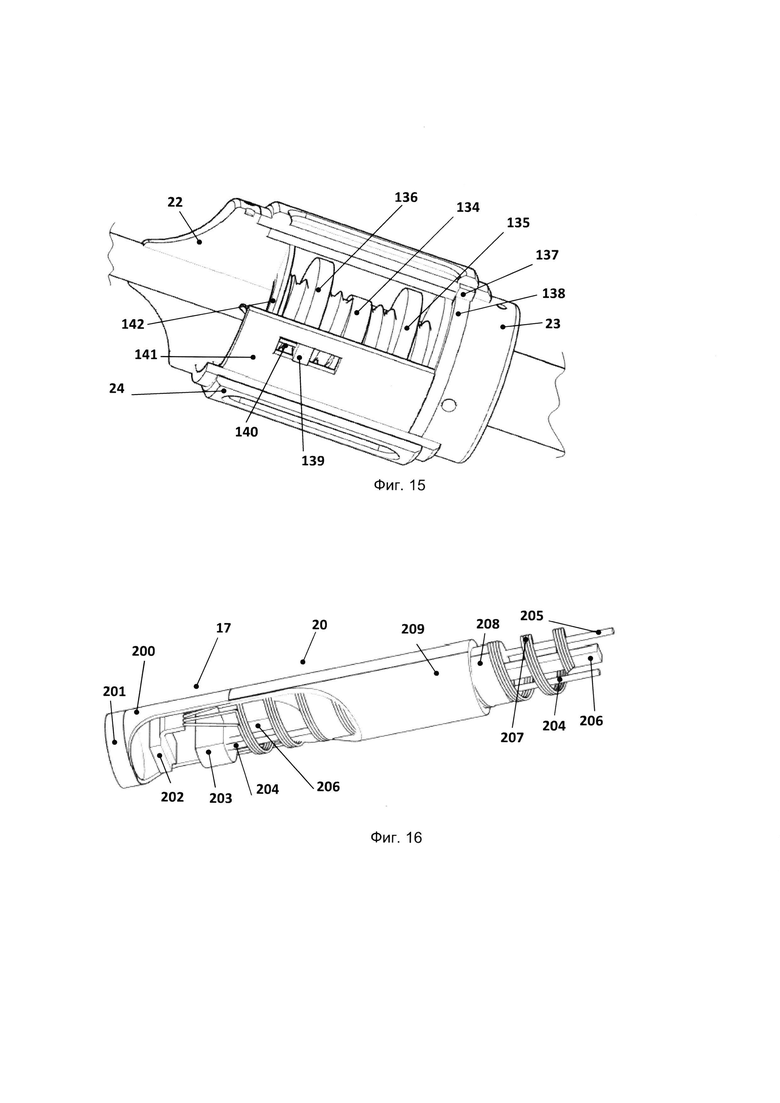
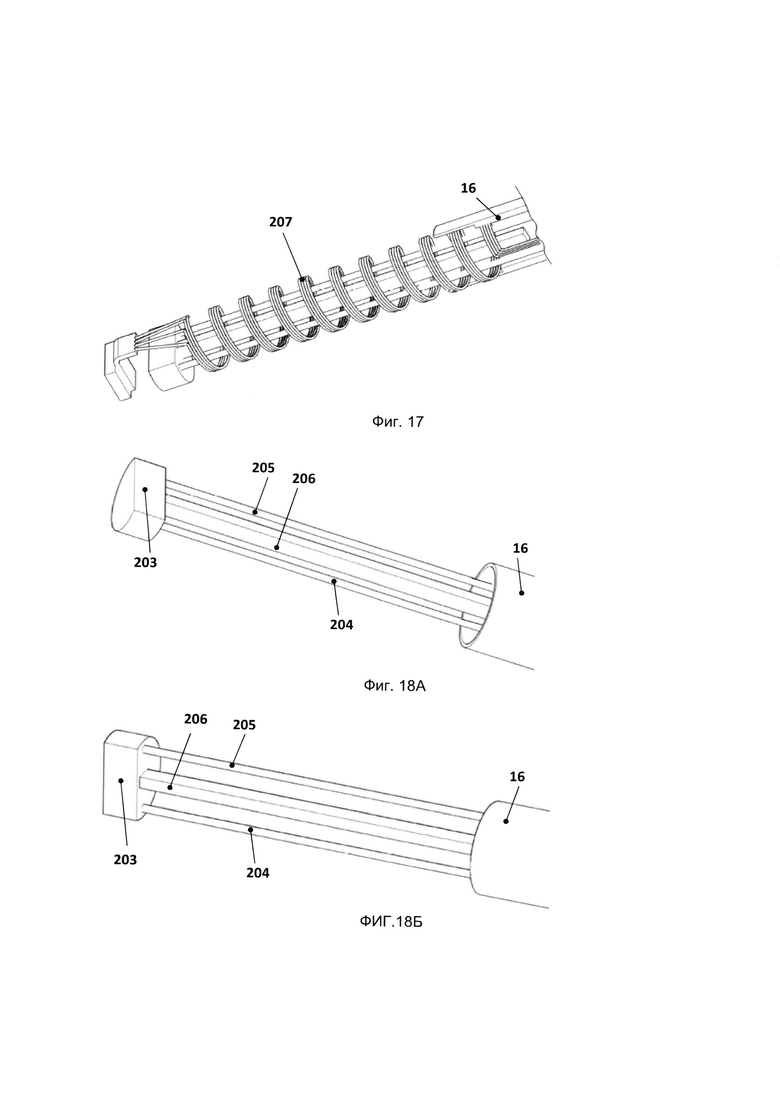
Заявленная группа изобретений относится к медицинской технике, а именно к управляемой съемной дистальной насадке для медицинского эндоскопического прибора для диагностических и/или хирургических манипуляций, управляющему блоку для насадки, медицинскому эндоскопическому прибору и способу использования медицинского эндоскопического прибора. Насадка содержит трубчатую часть, расположенную на дистальном участке указанной насадки. Трубчатая часть содержит управляемый участок, расположенный на дистальном конце трубчатой части. Насадка включает функциональную головку, расположенную на дистальном конце управляемого участка. Насадка имеет соединительную часть, расположенную на проксимальном участке насадки и выполненную с возможностью разъемного соединения насадки с управляющим блоком медицинского эндоскопического прибора. Насадка содержит модуль управления насадкой, содержащий выполненный с возможностью поворота оператором орган управления. Модуль управления насадкой соединен с трубчатой частью и соединительной частью и выполнен с возможностью создания управляющих механических воздействий для управления управляемым участком трубчатой части при повороте указанного органа управления. Управляющий блок насадки содержит приемный элемент, выполненный с возможностью присоединения управляемой съемной дистальной насадки. Медицинский эндоскопический прибор содержит управляющий блок и управляемую съемную дистальную насадку. Способ использования медицинского эндоскопического прибора включает этап присоединения насадки к управляющему блоку. Далее подают электропитание на управляющий блок. После чего вводят управляемую съемную дистальную насадку в обследуемую область тела пациента. Затем осуществляют диагностические и/или хирургические манипуляции, определяемые видом присоединенной управляемой съемной дистальной насадки. Техническим результатом является передача управляющего сигнала и обеспечение быстрой замены насадки. 4 н. и 25 з.п. ф-лы, 18 ил.
1. Управляемая съемная дистальная насадка для медицинского эндоскопического прибора для диагностических и/или хирургических манипуляций, содержащая
трубчатую часть, расположенную на дистальном участке указанной насадки, причем трубчатая часть содержит управляемый участок, расположенный на дистальном конце трубчатой части,
функциональную головку, расположенную на дистальном конце управляемого участка,
соединительную часть, расположенную на проксимальном участке насадки и выполненную с возможностью разъемного соединения насадки с управляющим блоком медицинского эндоскопического прибора, и
модуль управления насадкой, содержащий выполненный с возможностью поворота оператором орган управления, причем модуль управления насадкой соединен с трубчатой частью и соединительной частью и выполнен с возможностью создания управляющих механических воздействий для управления управляемым участком трубчатой части при повороте указанного органа управления.
2. Насадка по п. 1, в которой модуль управления расположен между трубчатой частью и соединительной частью.
3. Насадка по п. 2, в которой трубчатая часть содержит жесткий участок, примыкающий к управляемому участку и соединенный с модулем управления насадкой.
4. Насадка по п. 1, в которой модуль управления насадкой содержит корпус и механизм управления, расположенный внутри корпуса и выполненный с возможностью механического воздействия на управляемый участок для изменения геометрической формы управляемого участка трубчатой части.
5. Насадка по п. 4, в которой корпус модуля управления насадкой содержит дистальную стенку и проксимальную стенку, которые закреплены на проксимальном продолжении трубчатой части.
6. Насадка по п. 5, в которой соединительная часть примыкает к проксимальной стенке и неподвижно присоединена к ней.
7. Насадка по п. 4, в которой орган управления охватывает механизм управления и выполнен с возможностью передачи механического воздействия на механизм управления и изменения тем самым геометрической формы управляемого участка трубчатой части.
8. Насадка по п. 7, в которой орган управления имеет по существу цилиндрическую форму.
9. Насадка по п. 4, в которой механизм управления содержит по меньшей мере две тяги, проходящие внутри трубчатой части, посредством которых модуль управления насадкой связан с управляемым участком.
10. Насадка по п. 9, в которой управляемый участок содержит кабель, выполненный в виде спирали, причем указанные тяги проходят внутри указанной спирали из кабеля.
11. Насадка по п. 10, в которой кабель выполнен с возможностью подачи через него питания и/или передачи информационных сигналов между функциональной головкой и управляющим блоком.
12. Насадка по п. 1, в которой функциональная головка содержит электронные компоненты, представляющие собой по меньшей мере одно из следующего: видеоголовку, источник ультразвукового излучения, источник ультрафиолетового излучения, источник инфракрасного излучения, источник видимого света, источник лазерного излучения или электрод.
13. Насадка по п. 1, которая также содержит метку радиочастотной идентификации для идентификации указанной управляемой съемной дистальной насадки при ее присоединении к управляющему блоку.
14. Насадка по п. 4, в которой механизм управления содержит барабан, приводимый во вращение органом управления, по меньшей мере две тяги и направляющую для тяг, причем дистальные концы указанных по меньшей мере двух тяг закреплены на дистальном конце управляемого участка, а их проксимальные концы закреплены на барабане, причем барабан выполнен с возможностью наматывания одной тяги и одновременного сматывания второй тяги при его вращении посредством указанного органа управления для изменения геометрической формы управляемого участка.
15. Насадка по п. 14, в которой изменение геометрической формы представляет собой изгиб управляемого участка.
16. Насадка по п. 14, в которой посредством наматывания одной тяги и одновременного сматывания второй тяги при вращении барабана обеспечено увеличение изгиба управляемого участка трубчатой части в одну сторону или уменьшение его изгиба в другую сторону в зависимости от направления вращения барабана, причем характеристика указанного управления является линейной.
17. Насадка по п. 14, в которой механизм управления модуля управления насадкой также содержит механизм фиксации формы управляемого участка, содержащий пружину, неподвижный фрикционный элемент и по меньшей мере один поворотный фрикционный элемент, выполненный с возможностью взаимодействия с неподвижным фрикционным элементом посредством указанной пружины для предотвращения поворота барабана с целью фиксации требуемого изгиба управляемого участка.
18. Насадка по п. 17, в которой механизм фиксации формы управляемого участка выполнен с возможностью выведения поворотного фрикционного элемента из взаимодействия с неподвижным фрикционным элементом посредством продольного перемещения органа управления для обеспечения свободного поворота органа управления для изменения изгиба управляемого участка.
19. Насадка по п. 1, в которой соединительная часть содержит по меньшей мере два электрических контактных элемента, выполненных с возможностью контакта с ответными контактными элементами управляющего блока при присоединении насадки к управляющему блоку.
20. Насадка по п. 19, в которой электрические контактные элементы расположены в один или несколько рядов на соединительной части, причем каждый последующий в продольном направлении насадки контактный элемент каждого ряда смещен относительно предыдущего контактного элемента в радиальном направлении внутрь.
21. Насадка по п. 19 или 20, в которой по меньшей мере один из указанных контактных элементов обеспечивает подачу через него электропитания на насадку, причем указанный по меньшей мере один контактный элемент имеет меньшую длину, чем остальные контактные элементы.
22. Управляющий блок для управляемой съемной дистальной насадки медицинского эндоскопического прибора для диагностических и/или хирургических манипуляций, содержащий приемный элемент, выполненный с возможностью присоединения управляемой съемной дистальной насадки по одному из пп. 1-21.
23. Управляющий блок по п. 22, дополнительно содержащий
электронный блок для выработки управляющих сигналов, обеспечивающих управление электронными компонентами управляемой съемной дистальной насадки, и
по меньшей мере два электрических контактных элемента, являющихся ответными к электрическим контактным элементам управляемой съемной дистальной насадки и выполненных с возможностью контакта с контактными элементами управляемой съемной дистальной насадки при ее присоединении к управляющему блоку.
24. Управляющий блок по п. 22 или 23, дополнительно содержащий средства фиксации, выполненные с возможностью взаимодействия со средствами фиксации, расположенными на управляемой съемной дистальной насадке, для фиксации дистальной насадки в управляющем блоке после ее присоединения, причем средства фиксации управляющего блока выполнены с возможностью высвобождения дистальной насадки посредством приведения в действие средства извлечения, расположенного на управляющем блоке.
25. Управляющий блок по п. 22, в котором средство извлечения выполнено в виде нажимной кнопки.
26. Управляющий блок по одному из пп. 22-25, который также содержит рукоятку для ее захвата оператором при манипулировании управляемой съемной дистальной насадкой.
27. Медицинский эндоскопический прибор для диагностических и/или хирургических манипуляций, содержащий
управляющий блок по любому из пп. 22-26, и
управляемую съемную дистальную насадку по любому из пп. 1-21.
28. Прибор по п. 27, который дополнительно содержит устройство отображения, выполненное с возможностью соединения с указанным управляющим блоком для вывода изображения, воспринимаемого управляемой съемной дистальной насадкой.
29. Способ использования медицинского эндоскопического прибора для диагностических и/или хирургических манипуляций по одному из пп. 27-28, согласно которому:
- присоединяют управляемую съемную дистальную насадку по любому из пп. 1-21 к управляющему блоку по одному из пп. 22-26;
- подают электропитание на управляющий блок;
- вводят управляемую съемную дистальную насадку в обследуемую область тела пациента;
осуществляют диагностические и/или хирургические манипуляции, определяемые видом присоединенной управляемой съемной дистальной насадки.
| WO2011006052 A2 13.01.2011 | |||
| Способ определения технического состояния двигателей внутреннего сгорания и устройство для его осуществления | 2018 |
|
RU2721992C1 |
| US20140073854 A1 13.03.2014 | |||
| WO2010002544 A1 07.01.2010 | |||
| ВИДЕОЭНДОСКОП ДЛЯ ОСМОТРА ВНУТРЕННИХ ПОВЕРХНОСТЕЙ ТРУБЧАТЫХ ИЗДЕЛИЙ | 2011 |
|
RU2494424C2 |
| ВИДЕОЭНДОСКОП И КОМПЛЕКТ ВИДЕОЭНДОСКОПОВ | 2013 |
|
RU2526948C1 |
| WO2005094665 A2 13.10.2005. | |||

