Изобретение относится к области мониторинга оборудования летательного аппарата (например, гондолы двигателя).
Уровень техники
Многие устройства летательного аппарата подвержены значительному влиянию внешних условий: температуры, давления, вибраций, ударов, электромагнитных помех и т.д.
Большинство этих устройств летательного аппарата непрерывно контролируются при помощи датчиков, которые измеряют параметры, характеризующие состояние этих устройств, чтобы, с одной стороны, обнаруживать появление неисправности или поломки, и, с другой стороны, обнаруживать ненормальное изменение параметра с целью упреждения такой поломки или такой неисправности.
Однако некоторые виды оборудования, например, такие как гондола двигателя, не оснащены (или лишь частично оснащены) такими датчиками, так как установка таких датчиков связана с определенными трудностями.
Вместе с тем, во время некоторых фаз полета гондолы двигателей подвергаются сильным воздействиям. В частности, на гондолу действуют большие перепады температуры и высокие уровни вибрации в ходе фаз взлета и набора высоты летательного аппарата, а также большие перепады давления в ходе фаз снижения, захода на посадку и приземления летательного аппарата. Эти температуры, вибрации и давления создают напряжения в гондоле, ускоряют ее старение и могут приводить к появлению механических дефектов в конструкции гондолы.
В настоящее время отслеживание таких механических дефектов осуществляют посредством визуальных осмотров в ходе операций обслуживания. Однако между каждым визуальным осмотром может появляться или усугубляться механический дефект или механические дефекты. В этом случае состояние гондолы требует либо серьезного ремонта гондолы, либо замены гондолы.
Разумеется, уже было предложено оснастить гондолу датчиками температуры, ускорения и давления, чтобы лучше отслеживать и упреждать появление таких механических дефектов и чтобы лучше понять происхождение и причину появления этих механических дефектов. Однако было признано, что установка этих датчиков на гондоле и, в частности, их подключение к сети авионики являются слишком сложными.
Объект изобретения
Задачей изобретения является снижение сложности включения системы мониторинга в оборудование летательного аппарата, такое как гондола двигателя.
Раскрытие сущности изобретения
Для достижения этой цели предложена система мониторинга оборудования летательного аппарата, содержащая задающий электронный модуль и исполнительный электронный модуль, оснащенные, каждый, первыми средствами беспроводной связи для установления связи между ними, при этом исполнительный электронный модуль дополнительно содержит средства измерения, включающие в себя датчик и предназначенные для осуществления измерения параметра оборудования летательного аппарата, и средства питания, обеспечивающие энергетическую автономность исполнительного электронного модуля, при этом задающий электронный модуль дополнительно содержит средства обнаружения, выполненные с возможностью обнаружения фазы полета, в которой находится летательный аппарат, и средства управления для управления средствами измерения исполнительного электронного модуля через первые средства беспроводной связи, чтобы адаптировать измерения, производимые средствами измерения, к обнаруженной фазе полета.
Задающий электронный модуль и исполнительный электронный модуль сообщаются между собой через первые средства беспроводной связи. Таким образом, задающий электронный модуль и исполнительный электронный модуль не связаны никаким проводным соединением, предназначенным для связи, что позволяет снизить сложность включения заявленной системы мониторинга в оборудование летательного аппарата. Задающий электронный модуль управляет исполнительным электронным модулем через первые средства беспроводной связи. Следовательно, управление исполнительным электронным модулем не требует подключения исполнительного электронного модуля к сети авионики.
Точно так же, средства питания исполнительного электронного модуля делают исполнительный электронный модуль энергетически автономным: следовательно, нет необходимости в подключении исполнительного электронного модуля к сети авионики для его питания.
Наконец, необходимо отметить, что адаптация измерений, производимых средствами измерения, к фазе полета позволяет, в частности, уменьшить частоту дискретизации датчика исполнительного электронного модуля, когда указанная фаза полета не требует измерений на высокой частоте, что позволяет уменьшить электрическое потребление исполнительного электронного модуля и, следовательно, увеличить продолжительность его автономии.
Изобретение будет более понятно из нижеследующего описания не ограничительного частного варианта выполнения изобретения.
Краткое описание чертежей
Описание представлено со ссылками на прилагаемые чертежи, на которых:
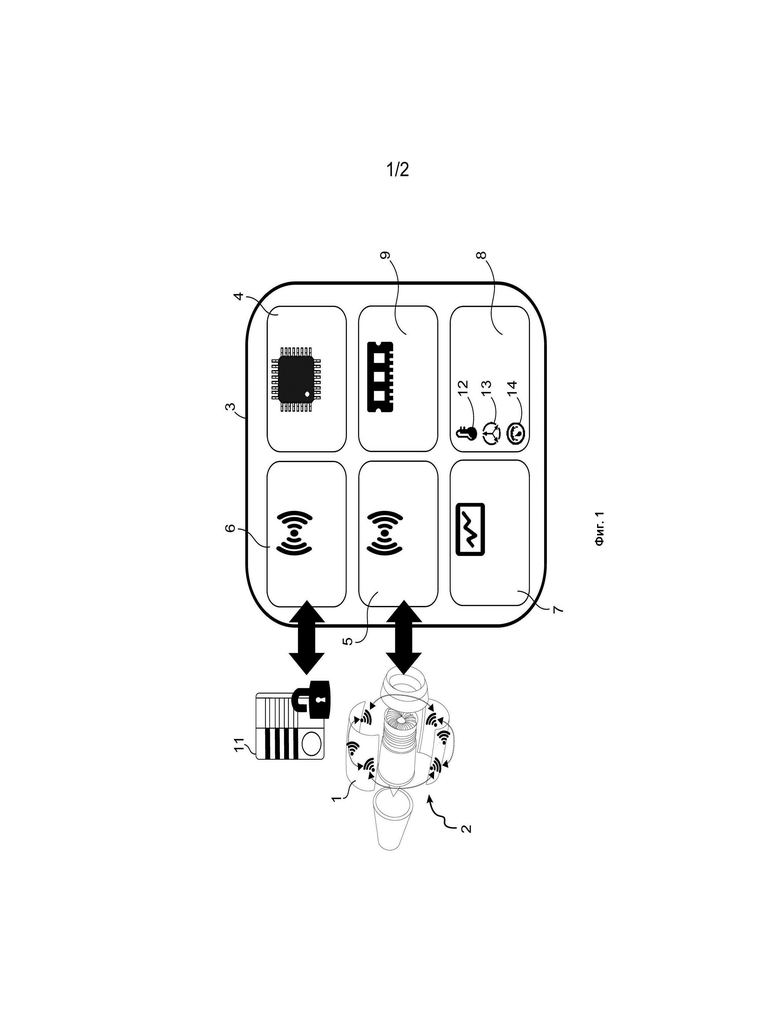
Фиг. 1 - электронный модуль заявленной системы мониторинга.
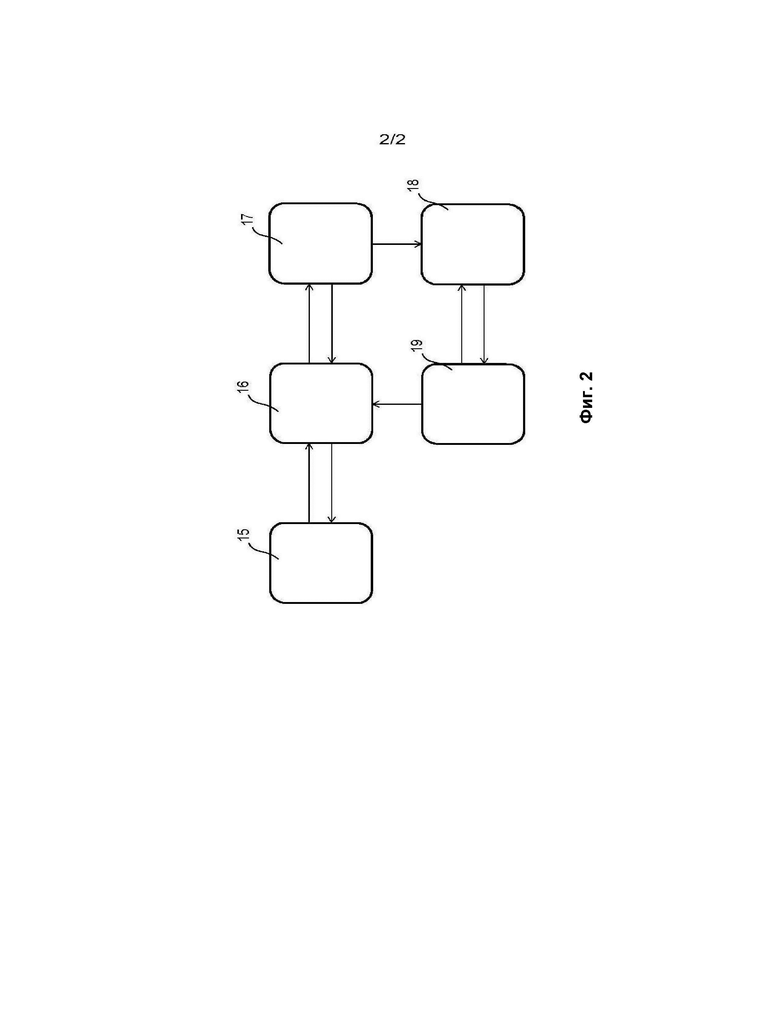
Фиг. 2 - схема работы заявленной системы мониторинга.
Подробное описание изобретения
Показанная на фиг. 1 заявленная система мониторинга предназначена для мониторинга гондолы 1 двигателя 2 летательного аппарата.
Заявленная система мониторинга содержит электронные модули 3, распределенные на конструкции гондолы 1. Электронные модули 3 включают в себя задающий электронный модуль и несколько исполнительных электронных модулей.
В данном случае каждый электронный модуль 3 (задающий или исполнительный) является одинаковым с точки зрения «аппаратных средств» (или hardware на английском языке), то есть каждый электронный модуль 3, как задающий, так и исполнительный, содержит одинаковые электрические компоненты. Задающий электронный модуль и исполнительные электронные модули различаются программой, устанавливаемой в микроконтроллере 4 каждого из этих электронных модулей 3. Так, задающий электронный модуль содержит микроконтроллер 4, в котором установлена программа, позволяющая ему выполнять функции, характерные для задающего электронного модуля, и каждый исполнительный электронный модуль содержит микроконтроллер 4, в котором установлена программа, позволяющая ему выполнять функции, характерные для исполнительного электронного модуля.
Кроме микроконтроллера 4, каждый электронный модуль содержит первые средства 5 беспроводной связи, вторые средства 6 беспроводной связи, модуль 7 питания, средства 8 измерения и память 9.
Первые средства 5 беспроводной связи включают в себя антенну и радиочастотный приемопередатчик. Первые средства 5 беспроводной связи позволяют задающему электронную модулю сообщаться с каждым исполнительным электронным модулем посредством радиочастотной связи. В данном случае первые средства 5 беспроводной связи используют запатентованный протокол связи на частоте и с мощностью, совместимыми с проблемами сертификации. В данном случае используемая частота равна 2,4 ГГц.
Вторые средства 6 беспроводной связи тоже включают в себя антенну и радиочастотный приемопередатчик. В данном случае вторые средства 6 беспроводной связи используются только задающим электронным модулем (и, следовательно, деактивированы на исполнительных электронных модулях). Вторые средства 6 беспроводной связи позволяют задающему электронному модулю передавать различные данные в наземный приемный терминал 11, находящийся снаружи летательного аппарата в зоне аэропорта. Заявленная система мониторинга образует вместе с наземным приемным терминалом 11 сеть LPWAN (от Low-Power Wide-Area Network на английском языке), используя технологию, разработанную для области интернета вещей (или IoT от Internet of Things на английском языке). В данном случае используемой технологией является технология узкополосного типа (или Narrow Band на английском языке) или сверхузкополосного типа (или UNB от Ultra Narrow Band на английском языке). Вторые средства 6 беспроводной связи работают на частоте, адаптированной к локальным регламентным требованиям. В данном случае используемая частота равна 2,4 ГГц. Благодаря применению сети LWPAN, вторые средства 6 беспроводной связи характеризуются относительно низким потреблением энергии. Скорость передачи средств связи тоже является относительно низкой, что не является проблемой, поскольку нет необходимости в особо быстрой связи между задающим электронным модулем и наземным приемным терминалом 11.
Первые средства 5 беспроводной связи и вторые средства 6 беспроводной связи совместимы со всеми международными нормами, относящимися к использованию радиочастот.
В частности, первые средства 5 беспроводной связи и вторые средства 6 беспроводной связи рассчитаны для обеспечения связи с использованием ограниченной мощности, чтобы не создавать помех для других устройств летательного аппарата и для наземного оборудования. В частности, первые средства 5 беспроводной связи и вторые средства 6 беспроводной связи совместимы с нормой RTCA DO-160 и, в частности, с разделом 21, в котором описана передача радиочастотной энергии.
Кроме того, первые средства 5 беспроводной связи и вторые средства 6 беспроводной связи являются мало чувствительными к различным электромагнитным помехам, создаваемым бортовым оборудованием летательного аппарата, или исходящим от различных источников помех на земле.
Следует отметить, что первые средства 5 беспроводной связи и вторые средства 6 беспроводной связи (для задающего электронного модуля) делают заявленную систему мониторинга полностью автономной с точки зрения связи. Ни один из электронных модулей 3 (задающих или исполнительных) не подключен к сети авионики. Кроме того, ни один из электронных модулей 3 (задающих или исполнительных) не связан через проводное соединение с другим электронным модулем 3 (или с другим оборудованием), чтобы сообщаться с этим другим электронным модулем 3 или с этим другим оборудованием.
Модуль 7 питания содержит средства хранения энергии, включающие в себя средства рекуперации энергии (energy harvesting на английском языке), батарею (можно также использовать другое средство хранения, такое как суперконденсатор) и средства управления энергией.
Средства рекуперации энергии в данном случае преобразуют вибрации, создаваемые двигателем 2, в электрическую энергию, которую используют для питания электронного модуля 3 и для подзарядки батареи. Разумеется, в электрическую энергию можно преобразовывать другой источник и, в частности, тепло, производимое двигателем 2, или электромагнитное поле, создаваемое при вращении двигателя 2.
Средства управления энергией питают электронный модуль 3, используя электрическую энергию, хранящуюся в батарее. Для зарядки батареи используют средства рекуперации энергии. Средства управления энергией адаптируют питание электронного модуля 3 к различным рабочим режимам, которые будут указаны в этом описании ниже.
Следует отметить, что модуль 7 питания делает электронный модуль 3 (задающий или исполнительный) полностью электрически автономным. В частности, каждый электронный модуль 3 не связан через проводное соединение с каким либо внешним бортовым источником энергии.
Средства 8 измерения включают в себя температурный датчик 12, датчик 13 ускорения и датчик 14 давления. Температурный датчик 12 измеряет температуру гондолы 1 (в месте, где он установлен), датчик 13 ускорения измеряет вибрации, действующие на гондолу 1, и датчик 14 давления измеряет давление, действующее на гондолу 1.
Память 9 электронного модуля 3 используют для записи и хранения определенного числа данных: измерений, производимых датчиками, результатов обработок, осуществляемых заявленной системой мониторинга, порогов срабатывания, данных идентификации, параметров конфигурации, в том числе данных конфигурации гондолы 1, и т.д.
Далее со ссылками на фиг. 1 и 2 следует более подробное описание работы заявленной системы мониторинга.
Заявленная система мониторинга работает в пяти рабочих режимах: в одном не операционном рабочем режиме 15 и в четырех операционных рабочих режимах. Четыре операционных рабочих режима включают в себя режим, называемый «режимом руления» 16, режим, называемый «режимом взлета и наборы высоты» 17, режим, называемый «режимом крейсерского полета» 18, и режим, называемый «режимом снижения, захода на посадку и приземления» 19.
Не операционный рабочий режим 15 связан с фазой, в ходе которой летательный аппарат стоит на земле с выключенными двигателями (например, летательный аппарат находится на стоянке в ангаре). Выражение «связан с фазой» значит, что заявленная система мониторинга работает в указанном режиме, когда обнаружена указанная фаза.
Каждый операционный рабочий режим связан с одной или несколькими фазами полета летательного аппарата, во время которой или во время которых его применяют.
Режим 16 руления связан с фазой руления при вылете (или Taxi-Out на английском языке, которая является фазой руления, предшествующей взлету) и с фазой руления при прилете (или Taxi-In на английском языке, которая является фазой руления после приземления).
Режим 17 взлета и набора высоты связан с фазой взлета (или Take Off на английском языке) и с фазой набора высоты (или Climb на английском языке).
Режим 18 крейсерского полета связан с фазой крейсерского полета (или Cruise на английском языке).
Режим 19 снижения, захода на посадку и приземления связан с фазой снижения (или Descent на английском языке), с фазой захода на посадку (или Approach на английском языке) и с фазой приземления (или Landing на английском языке).
Когда заявленная система мониторинга находится в не операционном рабочем режиме 15 (то есть, когда летательный аппарат стоит на земле с выключенными двигателями), каждый исполнительный электронный модуль находится в спящем режиме, в котором потребление электрической энергии электронным модулем является практически нулевым.
В этом случае задающий электронный модуль находится в режиме с низким потреблением энергии: активными являются только микроконтроллер 4, температурный датчик 12 и датчик ускорения задающего электронного модуля.
Таким образом, не операционный рабочий режим заявленной системы мониторинга является режимом с низким потреблением энергии.
Когда запускают двигатель 2 летательного аппарата, температура гондолы 1 повышается и действующие на гондолу 1 вибрации усиливаются. Температурный датчик 12 задающего электронного модуля и датчик 13 ускорения задающего электронного модуля обнаруживают, что двигатель 2 летательного аппарата активирован, измеряя температуру и вибрации, действующие на гондолу 1. Таким образом, температурный датчик 12 задающего электронного модуля и датчик 13 ускорения задающего электронного модуля обнаруживают, что летательный аппарат готов перейти к фазе руления при вылете.
При этом задающий электронный модуль переходит из режима низкого потребления энергии в нормальный режим. Задающий электронный модуль подает команду в исполнительные электронные модули, чтобы перевести исполнительные электронные модули из спящего режима в нормальный режим. Управление исполнительными электронными модулями осуществляют через микроконтроллер 4 задающего электронного модуля, через первые средства 5 беспроводной связи задающего электронного модуля (которые, таким образом, выполняют роль средств управления) и через первые средства 5 беспроводной связи каждого исполнительного электронного модуля.
Задающий электронный модуль синхронизирует исполнительные электронные модули по режиму 16 руления, поскольку фаза полета, следующая за запуском двигателя 2, является фазой руления при вылете.
Следовательно, температурный датчик 12 и датчик 13 ускорения играют роль средств обнаружения, выполненных с возможностью обнаружения фазы полета, в которой находится летательный аппарат.
Задающий электронный модуль подает команду в средства 8 измерения исполнительных электронных модулей (опять через микроконтроллер 4 и первые средства 5 беспроводной связи задающего электронного модуля, которые выполняют роль средств управления), чтобы адаптировать измерения, производимые средствами 8 измерения, к фазе руления при вылете. В данном случае температурный датчик 12 и датчик 13 ускорения каждого исполнительного электронного модуля активированы с частотой дискретизации, равной одному измерению в минуту. Измерения, осуществляемые температурным датчиком 12 и датчиком 13 ускорения каждого исполнительного электронного модуля, поступают через первые средства 5 беспроводной связи в задающий электронный модуль, который сохраняет эти измерения в своей памяти 9.
Когда летательный аппарат взлетает, вибрации, действующие на гондолу 1, усиливаются. Датчик 13 ускорения задающего электронного модуля обнаруживает, что летательный аппарат находится в фазе взлета.
Задающий электронный модуль синхронизирует исполнительные электронные модули по режиму взлета и набора высоты.
Таким образом, датчик 13 ускорения задающего электронного модуля выполняет роль средств обнаружения, выполненных с возможностью обнаружения фазы полета, в которой находится летательный аппарат.
Задающий электронный модуль подает команду в средства 8 измерения исполнительного электронного модуля через первые средства 5 беспроводной связи, чтобы адаптировать измерения, производимые средствами 8 измерения, к фазе взлета и к фазе набора высоты.
В данном случае температурный датчик 12 и датчик 13 ускорения каждого исполнительного электронного модуля активированы с частотой дискретизации, равной трем измерениям в минуту, и датчик 14 давления каждого исполнительного электронного модуля активирован с частотой дискретизации, равной одному измерению в минуту.
Измерения, осуществляемые температурным датчиком 12, датчиком 13 ускорения и датчиком 14 давления каждого исполнительного электронного модуля, поступают через первые средства 5 беспроводной связи в задающий электронный модуль, который сохраняет эти измерения в своей памяти 9.
В конце набора высоты летательный аппарат летит на большой высоте, и атмосферное давление является относительно низким. Датчик 14 давления задающего электронного модуля (тоже активированный с частотой дискретизации, равной одному измерению в минуту) обнаруживает конец фазы набора высоты и, следовательно, начало фазы крейсерского полета.
Задающий электронный модуль синхронизирует исполнительные электронные модули по режиму крейсерского полета.
Таким образом, датчик 14 давления задающего электронного модуля выполняет роль средств обнаружения, выполненных с возможностью обнаружения фазы полета, в которой находится летательный аппарат.
Задающий электронный модуль подает команду в средства 8 измерения исполнительного электронного модуля через первые средства 5 беспроводной связи, чтобы адаптировать измерения, производимые средствами 8 измерения, к фазе крейсерского полета.
В данном случае температурный датчик 12 и датчик 13 ускорения каждого исполнительного электронного модуля активированы с частотой дискретизации, равной одному измерению в минуту, и датчик 14 давления каждого исполнительного электронного модуля активирован с частотой дискретизации, равной одному измерению в минуту. Частота дискретизации температурного датчика 12 и частота дискретизации датчика 13 ускорения являются низкими, так как фаза крейсерского полета требует лишь сокращенного мониторинга. Следовательно, потребление электрической энергии заявленной системой мониторинга является низким.
Измерения, осуществляемые температурным датчиком 12, датчиком 13 ускорения и датчиком 14 давления каждого исполнительного электронного модуля, поступают через первые средства 5 беспроводной связи в задающий электронный модуль, который сохраняет эти измерения в своей памяти 9.
После завершения фазы крейсерского полета наступает фаза снижения. Фазу снижения обнаруживает датчик 14 давления задающего электронного модуля, обнаруживающий повышение давления, действующего на гондолу 1, и, следовательно, снижение высоты полета летательного аппарата.
Задающий электронный модуль синхронизирует исполнительные электронные модули по режиму снижения, захода на посадку и приземления.
Таким образом, датчик 14 давления задающего электронного модуля выполняет роль средств обнаружения, выполненных с возможностью обнаружения фазы полета, в которой находится летательный аппарат.
Задающий электронный модуль подает команду в средства 8 измерения исполнительного электронного модуля через первые средства 5 беспроводной связи, чтобы адаптировать измерения, производимые средствами 8 измерения, к фазе крейсерского полета.
В данном случае температурный датчик 12 и датчик 13 ускорения каждого исполнительного электронного модуля активированы с частотой дискретизации, равной трем измерениям в минуту, и датчик 14 давления каждого исполнительного электронного модуля активирован с частотой дискретизации 1 кГц. Высокая частота дискретизации датчика 14 давления позволяет эффективно обнаруживать события типа резких перепадов давления, которые могут повредить конструкцию гондолы 1. Такие события происходят в основном во время фаз снижения, захода на посадку и приземления.
Измерения, осуществляемые температурным датчиком 12, датчиком 13 ускорения и датчиком 14 давления каждого исполнительного электронного модуля, поступают через первые средства 5 беспроводной связи в задающий электронный модуль, который сохраняет эти измерения в своей памяти 9.
В конце полета датчик 14 давления обнаруживает, что на гондолу 1 больше не действуют вибрации, создаваемые двигателем 2. Задающий электронный модуль подает команду в исполнительные электронные модули для их перехода в спящий режим. Заявленная система мониторинга опять оказывается в не операционном рабочем режиме 15.
Когда полет завершен, задающий электронный модуль передает все измерения, сохраненные в памяти 9 задающего электронного модуля и собранные во время этих различных фаз полета, в наземный приемный терминал 11 через вторые средства 6 беспроводной связи задающего электронного модуля. Задающий электронный модуль передает также в наземный приемный терминал 11 другие данные, сохраненные в его памяти 9: результаты обработок, осуществленных заявленной системой мониторинга, параметры конфигурации, в том числе данные конфигурации гондолы 1, и т.д.
Следует отметить, что для оптимизации электрического потребления заявленной системы мониторинга активацию вторых средств 6 беспроводной связи задающего электронного модуля, которые обеспечивают связь с наземным приемным терминалом 11, производят только при обнаружении фазы приземления. В других фазах полета самолета связь с землей не допускается, и вторые средства 6 беспроводной связи не получают питания.
Разумеется, изобретение не ограничивается описанным вариантом выполнения и охватывает любую версию в рамках объема изобретения, определенного формулой изобретения.
В данном случае было указано, что все электронные модули, как «задающие», так и «исполнительные», являются идентичными с точки зрения аппаратных средств. Разумеется, можно использовать задающие и исполнительные электронные модули, различающиеся с точки зрения аппаратных средств, и даже исполнительные электронные модули могут различаться между собой с точки зрения аппаратных средств.
Например, исполнительные электронные модули могут содержать средства измерения, различающиеся по своему положению на оборудовании.
Например, можно предусмотреть, чтобы на исполнительных электронных модулях не были установлены средства беспроводной связи. Можно также предусмотреть, чтобы энергетически автономными были только исполнительные электронные модули: в этом случае исполнительные электронные модули содержат батарею и предпочтительно средства рекуперации энергии, тогда как задающий электронный модуль связан с бортовым источником мощности.
Можно также предусмотреть, чтобы некоторые исполнительные электронные модули были специально предназначены для измерения температуры и, следовательно, содержали только температурный датчик, чтобы другие исполнительные электронные модули были предназначены для измерения вибраций и, следовательно, содержали только датчик ускорения, и чтобы некоторые исполнительные электронные модули были предназначены для измерения давления и, следовательно, содержали только датчик давления. В этом случае при данном операционном рабочем режиме задающий электронный модуль активирует только исполнительные электронные модули, которые могут производить измерения во время этого данного операционного рабочего режима.
Разумеется, указанные датчики могут быть другими: например, можно оснастить задающий или исполнительный электронный модуль датчиком скорости, датчиком электрического параметра (тока, напряжения и т.д.), датчиком силы и т.д.
Хотя выше была описана конкретная архитектура, в которой гондола оснащена задающим электронным датчиком и несколькими исполнительными электронными датчиками, можно предусмотреть и другую архитектуру. В частности, можно предусмотреть несколько задающих электронных модулей для одной гондолы или только один задающий электронный модуль для нескольких гондол. Электронные модули (и, в частности, задающий электронный модуль) не обязательно должны быть установлены на контролируемом оборудовании.
Роль каждого задающего или исполнительного электронного модуля в заявленной системе мониторинга может слегка отличаться от описанной выше роли. Например, некоторые исполнительные электронные модули можно использовать для ретрансляции данных, поступающих от других исполнительных электронных модулей, в задающий электронный модуль.
Хотя для вторых средств беспроводной связи было упомянуто применение технологии типа узкополосной или сверхузкополосной в случае сети LWPAN, можно также использовать другую технологию, например, технологию типа LoRa или SigFox. Можно также использовать частоту, отличную от частоты 2,4 ГГц, и, в частности, частоту в диапазоне WAIC (от Wireless Avionics Intra-Communications на английском языке). Можно, например, использовать частоты 868 МГц, 915 МГц или 4,2 ГГц. Точно так же, для первых средств беспроводной связи можно использовать частоту, отличную от частоты 2,4 ГГц, и, в частности, частоты 868 МГц, 915 МГц или 4,2 ГГц.
Частоты дискретизации тоже могут отличаться от частот, указанных в описании.
Выше было указано, что переход от не операционного рабочего режима в режим руления заявленной системы мониторинга происходит по команде задающего электронного модуля, когда датчики (температуры, ускорения) задающего электронного модуля обнаруживают повышение температуры и усиление вибраций, действующих на гондолу.
В альтернативном варианте можно предусмотреть, чтобы задающий электронный модуль находился в спящем режиме, когда заявленная система мониторинга находится в не операционном рабочем режиме, как и исполнительные электронные модули. В этом случае «пробуждение» задающего электронного модуля осуществляют средства рекуперации энергии, которые используют вибрации при запуске двигателя, чтобы производить электрическую энергию и, следовательно напряжение питания задающего электронного модуля.
Наконец, заявленную систему мониторинга вполне можно использовать для контроля оборудования летательного аппарата, отличного от гондолы, например, элемента крыла или шасси летательного аппарата.
Изобретение относится к области мониторинга оборудования летательного аппарата. Техническим результатом является расширение арсенала технических средств. Упомянутый технический результат достигается тем, что система мониторинга оборудования (1) летательного аппарата (например, гондолы двигателя) содержит задающий электронный модуль и исполнительный электронный модуль, оснащенные, каждый, первыми средствами (5) беспроводной связи, при этом исполнительный электронный модуль дополнительно содержит средства (8) измерения, предназначенные для осуществления измерения параметра оборудования летательного аппарата, и средства питания, обеспечивающие энергетическую автономность исполнительного электронного модуля, при этом задающий электронный модуль дополнительно содержит средства обнаружения, выполненные с возможностью обнаружения фазы полета, в которой находится летательный аппарат, и средства управления для управления средствами (8) измерения исполнительного электронного модуля через первые средства (5) беспроводной связи, чтобы адаптировать измерения, производимые средствами измерения, к обнаруженной фазе полета. 2 н. и 11 з.п. ф-лы, 2 ил.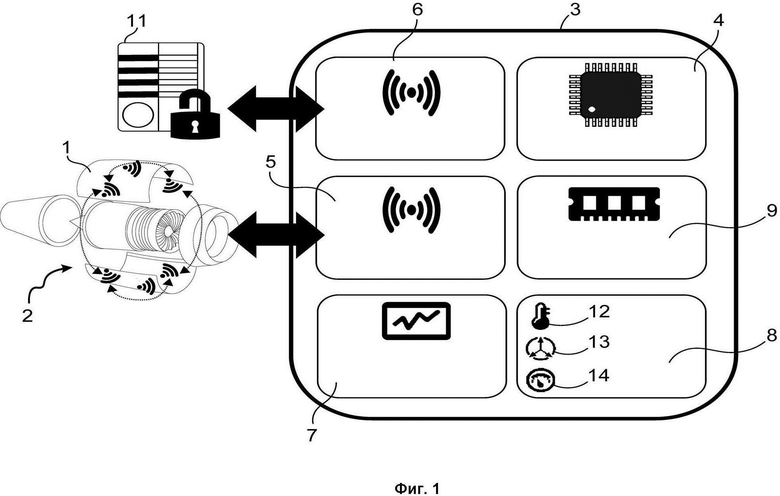
1. Система мониторинга оборудования (1) летательного аппарата, содержащая задающий электронный модуль и исполнительный электронный модуль, оснащенные, каждый, первыми средствами (5) беспроводной связи для осуществления связи между ними, при этом исполнительный электронный модуль дополнительно содержит средства (8) измерения, включающие в себя датчик и предназначенные для осуществления измерения параметра оборудования летательного аппарата, и средства питания, обеспечивающие энергетическую автономность исполнительного электронного модуля, при этом задающий электронный модуль дополнительно содержит средства обнаружения, выполненные с возможностью обнаружения фазы полета, в которой находится летательный аппарат, и средства управления для управления средствами (8) измерения исполнительного электронного модуля через первые средства (5) беспроводной связи, чтобы адаптировать измерения, производимые средствами измерения, к обнаруженной фазе полета.
2. Система мониторинга по п. 1, в которой средства измерения исполнительного электронного модуля и/или средства обнаружения задающего электронного модуля включают в себя температурный датчик (12), и/или датчик (13) ускорения, и/или датчик (14) давления.
3. Система мониторинга по п. 1, в которой адаптация измерений состоит в использовании другого датчика для осуществления измерений другого параметра и/или в изменении частоты дискретизации датчика.
4. Система мониторинга по п. 1, характеризующаяся тем, что выполнена с возможностью работать в неоперационном рабочем режиме с низким потреблением энергии и в нормальном рабочем режиме в зависимости от обнаруженной фазы полета.
5. Система мониторинга по п. 4, в которой средства управления задающего электронного модуля выполнены с возможностью управлять исполнительным электронным модулем для его перевода из спящего режима в нормальный режим, чтобы перевести систему мониторинга из не операционного рабочего режима в операционный рабочий режим.
6. Система мониторинга по п. 1, в которой обнаруживаемая фаза полета является одной из фаз из фазы руления при вылете, фазы взлета, фазы набора высоты, фазы крейсерского полета, фазы снижения, фазы захода на посадку, фазы приземления, фазы руления при прилете.
7. Система мониторинга по п. 6, в которой средства обнаружения выполнены с возможностью обнаружения, что двигатель летательного аппарата запущен, и, следовательно, летательный аппарат готов к фазе руления при вылете, посредством измерения вибраций или температуры, которые действуют на указанное оборудование летательного аппарата.
8. Система мониторинга по п. 6, в которой средства обнаружения выполнены с возможностью обнаружения, что летательный аппарат находится в фазе взлета или в фазе приземления, посредством измерения вибраций, действующих на оборудование летательного аппарата.
9. Система мониторинга по п. 6, в которой средства обнаружения выполнены с возможностью обнаружения, что летательный аппарат находится в фазе крейсерского полета, посредством измерения давления, действующего на оборудование летательного аппарата.
10. Система мониторинга по п. 1, в которой средства питания исполнительного электронного модуля включают в себя средства рекуперации энергии.
11. Система мониторинга по п. 1, в которой задающий электронный модуль содержит вторые средства (6) беспроводной связи для передачи измерений в наземный приемный терминал (11).
12. Система мониторинга по п. 11, в которой вторые средства (6) беспроводной связи активируются только после обнаружения фазы приземления.
13. Гондола двигателя, содержащая систему мониторинга по любому из пп. 1-12.
| WO 2013184894 A1, 12.12.2013 | |||
| WO 2013131072 A2, 06.09.2013 | |||
| US 2015330869 A1, 19.11.2015 | |||
| US 2013166135 А1, 27.06.2013 | |||
| RU 2011135881 А, 27.03.2013. |

