Изобретение относится к области электроэнергетики, а более конкретно к способам монтажа маркеров, закрепляемых на проводах и молниезащитных тросах воздушных линий электропередачи, с помощью беспилотных летательных аппаратов. Вышеуказанные маркеры применяются для предупреждения пилотов воздушных судов о прохождении проводов и молниезащитных тросов воздушных линий электропередачи, а также для предотвращения столкновения птиц с проводами и молниезащитными тросами.
Известен способ монтажа провода с помощью летательных аппаратов, преимущественно двух вертолетов, заключающийся в том, что провод подцепляют к внешней подвеске вертолетов, поднимают и транспортируют к месту монтажа. После его укладки производят отцепку вертолетов. К каждому вертолету подцепляют один из концов провода, разложенного на земле, поднимают эти концы вертолетами до образования полупетли, сближают вертолеты до безопасного расстояния и выдерживают его при транспортировании. Зависают над местом монтажа, снижением вертолетов укладывают нижнюю часть полупетли на землю, затем производят укладку обеих ветвей полупетли перемещением вертолетов над местом в противоположных направлениях со снижением. Прикрепляют концы провода к тросам тяговых механизмов, установленных по обе стороны места монтажа, которыми осуществляют предварительную натяжку провода и, разгрузив внешние подвески вертолетов, производят отцепку концов провода от них, а затем выполняют окончательное натяжение провода тяговыми механизмами (см. патент РФ №2091944 МПК H02G 1/02 (1995.01), 1997 г.).
В этом техническом решении используются управляемые человеком летательные аппараты, что значительно удорожает и усложняет, а в некоторых случаях и делает невозможным, процесс монтажа, в частности провода, например, в труднодоступных горных условиях или на переходах через водные пространства и т.п. Кроме того, монтаж маркеров на воздушных линиях электропередачи с помощью летательных аппаратов, управляемых человеком, например, вертолетов, сильно затруднен из-за необходимости оборудования их специальными монтажными средствами, что реализовать при имеющемся парке вертолетов достаточно сложно.
Известен также способ монтажа провода с помощью летательных аппаратов, преимущественно двух вертолетов, заключающийся в том, что посредством прикрепленных к вертолетам устройств для размещения запаса провода и для поддерживания раскатанного провода перемещением вертолетов осуществляют последовательно операции по его монтажу. Первым вертолетом с раскаточным устройством и установленным в нем барабаном с проводом подают выпущенный конец провода к ближней опоре, прикрепляют его к ней и перемещают первый вертолет в направлении к дальней опоре. Останавливают его над средней частью пролета, а около ближней опоры заправляют прикрепленный участок провода в ролик, подцепленный к второму вертолету. После этого перемещают оба вертолета в направлении к дальней опоре. При подлете к ней первого вертолета второй вертолет останавливают над средней частью пролета, а первым укладывают на землю раскаточное устройство с барабаном. Прикрепляют к проводу трос тягового механизма, размещенного за дальней опорой, отсоединяют провод от раскаточного устройства, которое удаляют первым вертолетом, и натягивают провод тяговым механизмом. Вторым вертолетом с роликом поддерживают провод над наземными препятствиями, а после завершения натяжки производят вторым вертолетом разгрузку ролика и его освобождение от провода (см патент РФ №2153748, МПК H02G 1/02 (2000.01), 2000 г.).
Данному способу монтажа провода с помощью летательных аппаратов присущи все недостатки, характерные для вышеприведенного аналога, причем использование двух вертолетов еще более усложняет и удорожает процесс монтажа.
Известны другие способы и устройства для монтажа и раскатки проводов (патент РФ №2015591, H02G 1/02, 1994 г.; патент РФ №2064214, H02G 1/02, 1996 г; патент РФ №2481683, H02G 1/02, 2013 г.)
Приведенным решениям присущи все недостатки, характерные для вышеприведенных аналогов.
Известен способ монтажа маркеров, закрепляемых на проводах и молниезащитных тросах воздушных линий электропередачи, с помощью беспилотных летательных аппаратов. Способ заключается в том, что используют беспилотный летательный аппарат (БПЛА), которым управляют в ручном или в автоматическом режиме при помощи бортового компьютера по радиоканалу. Маркер, выполненный в виде неразъемного шарообразного, или эллипсообразного, или кеглеобразного, или конусообразного, или иной геометрической фигуры элемента, удерживают БПЛА регулируемыми захватами, закрепленными на несущей конструкции. Затем по радиосигналу включают электродвигатели с винтами-пропеллерами, также закрепленными на несущей конструкции БПЛА, поднимают маркер и транспортируют его к месту монтажа. При этом маневрируют БПЛА таким образом, чтобы он завис над проводом или молниезащитным тросом воздушной линии электропередачи в положении, когда провод или молниезащитный трос входят в нижнюю прорезь, выполненную в маркере. В этом состоянии по радиосигналу приводят в действие инструмент, обеспечивающий передачу механических усилий на зажимы, посредством которых маркер закрепляют на проводе или молниезащитном тросе. Весь процесс монтажа снимают на видеокамеру, установленную на выносной штанге на поверхности маркера. После завершения процесса монтажа освобождают регулируемые захваты от удержания маркера, поднимают БПА над воздушной линией электропередачи и транспортируют его к месту стоянки (см. патент РФ №2644420, МПК H02G 7/05 (2006.01), 2018 г., п.4 формулы). Данное решение принято за прототип.
Недостатком указанного способа является сложность захвата, позиционирования и фиксации маркера, т.к. требует большой точности маневрирования и длительного удержания на одном месте беспилотного летательного аппарата.
Недостатком зажимного устройства, реализующего способ по патенту №2644420, когда по радиосигналу приводят в действие инструмент, обеспечивающий передачу механических усилий на зажимы (болт-гайка), посредством которых маркер закрепляют на проводе или молниезащитном тросе, является сложность захвата и высокая трудоемкость позиционирования и фиксации маркера.
Известен маркер, выполненный в виде неразъемного шарообразного элемента, имеющий в нижней части прорезь с установленным в ней зажимом, который может быть зафиксирован в закрытом положении с помощью внешнего воздействия на него инструментом, обеспечивающим передачу механических усилий. За счет внешнего воздействия на зажимы маркера, его закрепляют на проводе или молниезащитном тросе воздушной линии электропередачи (см. патент РФ №2644420, МПК H02G 7/05 (2006.01), 2018 г., п.4 формулы). Данное решение принято за прототип для маркера.
Недостатком известного маркера является необходимость применения внешнего воздействия инструментом на зажимы маркера, что приводит к высокой трудоемкости его фиксации.
Известен пружинный зажим, представляющий собой прищепку. Зажим содержит пружину и рычаги, соединенные между собой цилиндрическим шарниром посередине, снабженные парой сведенных вместе противоположных лапок и парой участков, выполняющих функцию рукоятки, спиральная пружина надета на стержень, имеющий рукоятку. Последний перемещается из первого свободного положения во второе, в котором пружина сжата и действует между участками, выполняющими функцию рукоятки (см. патент Великобритании № 1451919, МПК 7 B25B 5/04, B25B 5/06, F16B 2/02, 1976 г.).
К недостаткам аналога относятся отсутствие фиксатора сжатого положения зажима, что приводит к ненадежной фиксации зажима и отсутствие автоматической фиксации.
Известен зажим для крепления изделия, который содержит корпус и рукоятку. Корпус выполнен монолитным и П-образным. В одном из двух плеч корпуса с внутренней стороны плеча расположен подпружиненный язык с рукояткой, размещенной с внешней стороны этого плеча, и подпружиненная защелка с гашеткой, установленной на одном конце защелки. На подпружиненном языке выполнен паз под цилиндрическую головку защелки, расположенную на противоположном конце защелки, ось симметрии которой перпендикулярна оси симметрии языка. Во втором плече корпуса расположен фиксатор положения изделия. В результате повышается надежность крепления и оперативность срабатывания, обеспечивается автоматизация процесса фиксации, компактность и малый вес, прочность и жесткость корпуса, технологичность в изготовлении, повышается унификация зажима. (см. патент РФ №2177567, МПК F16B 2/18, F16B 21/06, E05B 55/08 (2000.01), 2001 г.).
Известный зажим обеспечивает автоматическое позиционирование и фиксацию, но в основном для изделий прямоугольного поперечного сечения. Не обеспечивает надежность захвата изделия, т.е. надежность попадания в П-образный паз корпуса. Кроме того, т.к. выступающая часть подпружиненной гашетки, обеспечивающей начало автоматической фиксации изделия, занимает не всю площадь контакта, изделие, имеющее недостаточный поперечный размер, например, канат, может и не попасть на выступающую часть гашетки, а значит, механизм не сработает.
Техническая проблема, решаемая заявляемым способом – упрощение процесса установки фиксации маркера.
Поставленная проблема решается за счет того, что в известном способе монтажа маркеров, закрепляемых на проводах и молниезащитных тросах воздушных линий электропередачи с помощью беспилотных летательных аппаратов, заключающемся в том, что в ручном режиме управления или в автоматическом режиме управления при помощи бортового компьютера по радиоканалу регулируемыми захватами, закрепленными на несущей конструкции беспилотного летательного аппарата, удерживают маркер, затем по радиосигналу включают электродвигатели с винтами-пропеллерами, поднимают маркер и транспортируют его к месту монтажа, при этом маневрируют беспилотным летательным аппаратом таким образом, чтобы он завис в положении, когда провод или молниезащитный трос располагаются под нижней прорезью, выполненной в маркере, в соответствии с изобретением, после позиционирования беспилотного летательного аппарата над проводом или молниезащитным тросом, освобождают захват и сбрасывают на провод или трос маркер, имеющий клиновидную прорезь в нижней части, осуществляя первоначальный захват провода или троса маркером, с последующей автоматической фиксацией маркера посредством зажимов.
Техническая проблема, решаемая заявляемыми устройствами – упрощение конструкции и обеспечение надежной и быстрой фиксации маркера на проводе ЛЭП дистанционно, посредством БПЛА .
Поставленная техническая проблема решается за счет того, что в известном маркере, выполненном в виде шарообразного элемента, имеющего установленный в нем зажим и прорезь, выполненную в нижней части маркера, в соответствии с изобретением, маркер выполнен разъемным, снабжен дополнительным зажимом, взаимосвязанным с первым зажимом, прорезь в нижней части маркера выполнена клиновидной, а центр тяжести шарообразного элемента расположен на расстоянии от 0,02 до 0,2 радиуса ниже опорной поверхности клиновидной прорези.
Зажимы выполнены подпружиненными, автоматического действия с возможностью запирания в разомкнутом состоянии
Поставленная техническая проблема решается за счет того, что разработан зажим, содержащий несущий элемент, на котором закреплены механизм принудительного раскрытия и две оси, на которые установлены захваты, выполненные с возможностью поворота относительно указанных осей, захваты снабжены сопрягаемыми зубчатыми секторами и приемными вырезами, расположенными под зубчатыми секторами; в верхней части каждый из захватов соединен с механизмом принудительного раскрытия, при этом между захватами установлена пружина сжатия, закрепленная на опорах, жестко соединенных с захватами, зажим снабжен элементом срабатывания, выполненным в виде спускового механизма, представляющего собой два коромысла, шарнирно соединённых между собой и с захватами.
Механизм принудительного раскрытия выполнен в виде диска-кривошипа с закреплёнными на нем шарнирно первыми концами дугообразных тяг, другие концы тяг- шарнирно соединены с верхними частями захватов.
Диск-кривошип механизма принудительного раскрытия жёстко соединён с валом для обеспечения поворота диска-кривошипа .
Технический результат от использования всех существенных признаков заявляемого способа заключается в упрощении захвата, позиционирования и фиксации маркера. Использование для осуществления способа беспилотного летательного аппарата, осуществляющего сброс на провод или трос маркера, имеющего клиновидную прорезь в нижней части, за счет чего осуществляется первоначальный захват провода или троса маркером, и затем происходит автоматическая фиксация маркера, посредством двух взаимосвязанных зажимов, что позволяет значительно упростить захват, позиционирование и фиксацию маркера на проводе или тросе, улучшить и упростить технологию при сокращении времени проведения данной операции, обеспечив надежную установку маркера.
Поскольку БПЛА осуществляет быстрый сброс маркера на провод, время его пилотирования над проводом минимально и таким образом упрощается технология установки маркера.
Надежность попадания провода в прорезь маркера обеспечивается за счет выполнения в нижней части маркера прорези, имеющей клиновидную форму.
Надежность попадания троса в паз спускового механизма и оказание воздействия на спусковой механизм обеспечивается клиновидной формой прорези маркера и наличием двух взаимосвязанных зажимов.
За счет выполнения маркера, снабженного двумя зажимами, каждый из которых содержит несущий элемент, на котором закреплены механизм принудительного раскрытия и две оси, на которые установлены захваты, выполненные с возможностью поворота относительно указанных осей, захваты снабжены сопрягаемыми зубчатыми секторами и приемными вырезами, расположенными под зубчатыми секторами; в верхней части каждый из захватов соединен с механизмом принудительного раскрытия, при этом между захватами установлена пружина сжатия, закрепленная на опорах, жестко соединенных с захватами, зажим снабжен элементом срабатывания, выполненным в виде спускового механизма, представляющего собой два коромысла, шарнирно соединённых между собой и с захватами обеспечивается быстрая и надежная фиксации маркера
Сущность изобретения поясняется чертежами:
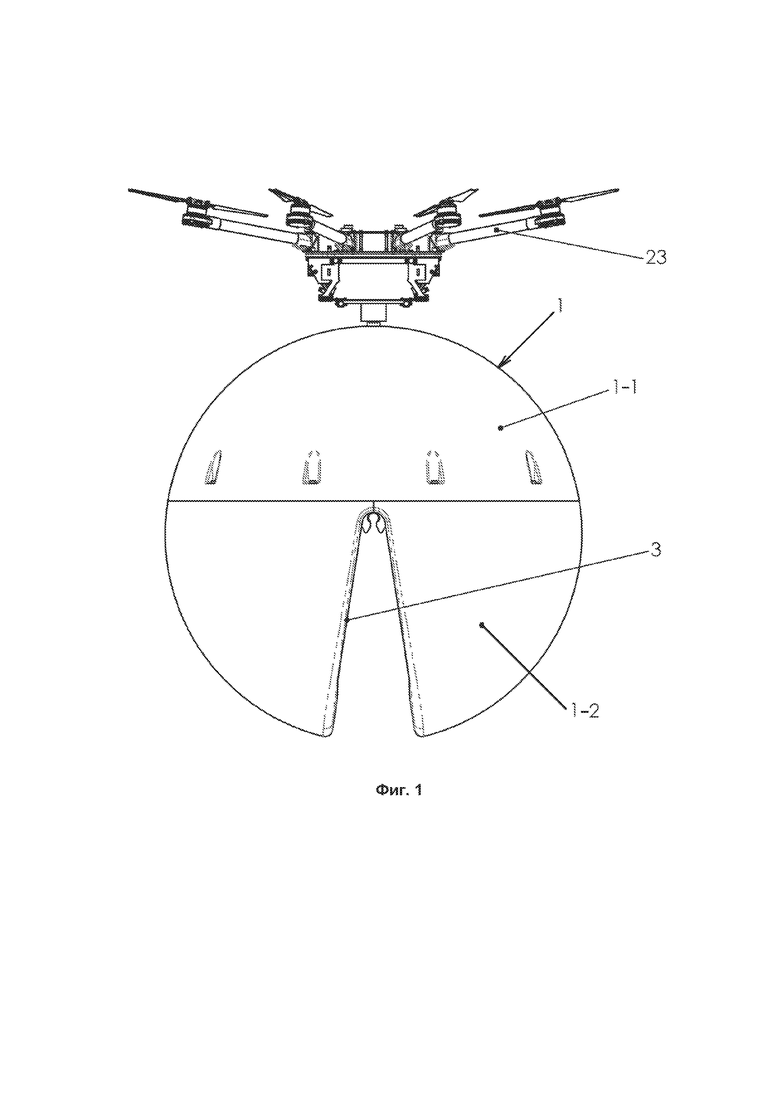
Фиг. 1 - 3 - схематически представлен способ монтажа маркера на проводе воздушной линии электропередачи, выполненный согласно настоящему изобретению, где
Фиг.1 – маркер, захваченный БПЛА,
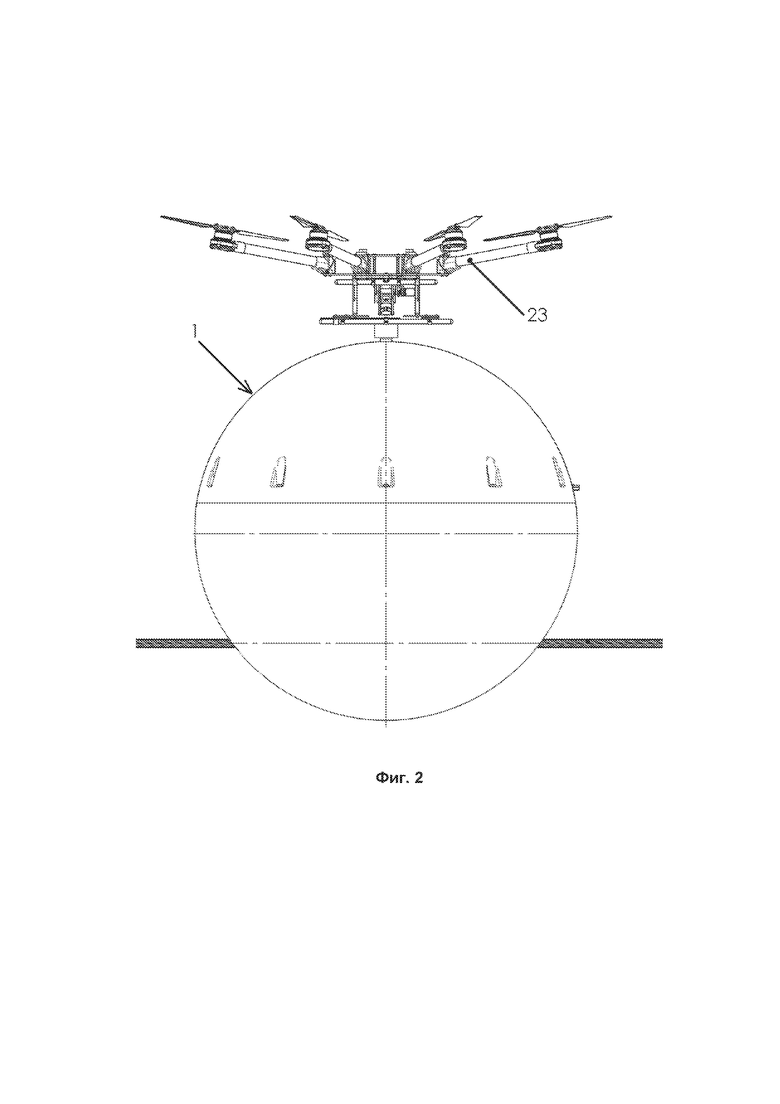
Фиг. 2 – БПЛА с маркером, зависший над проводом,
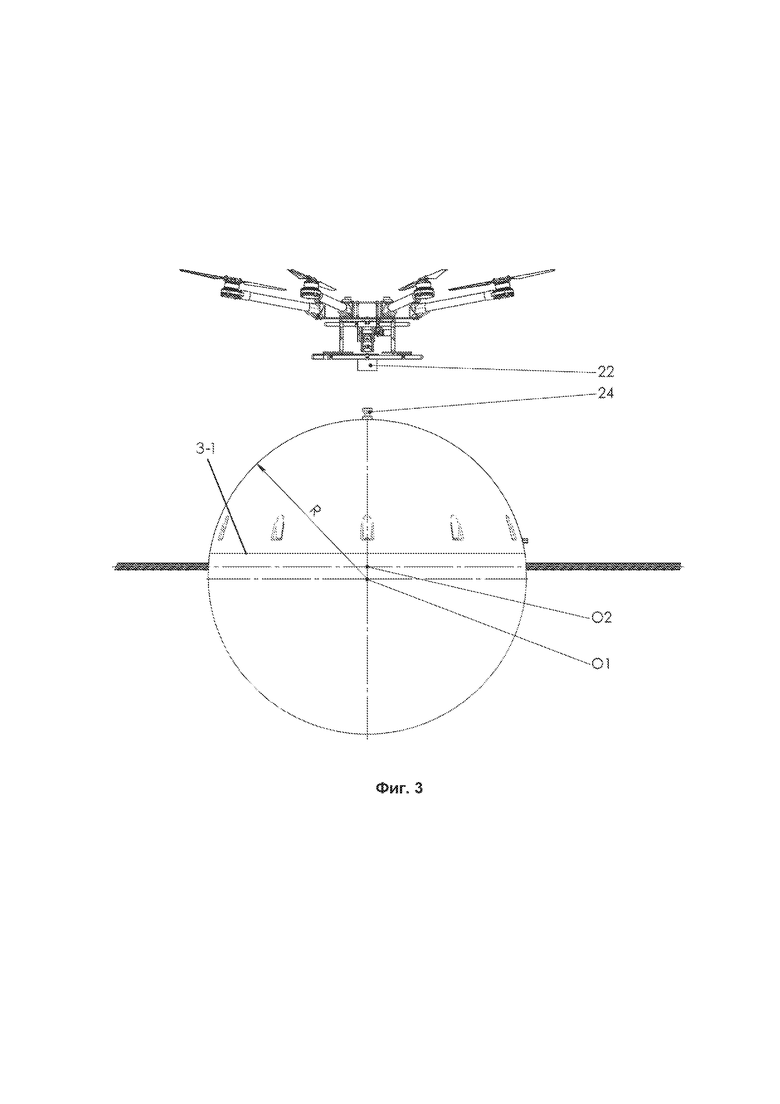
Фиг. 3 – отсоединение и сброс маркера на провод;
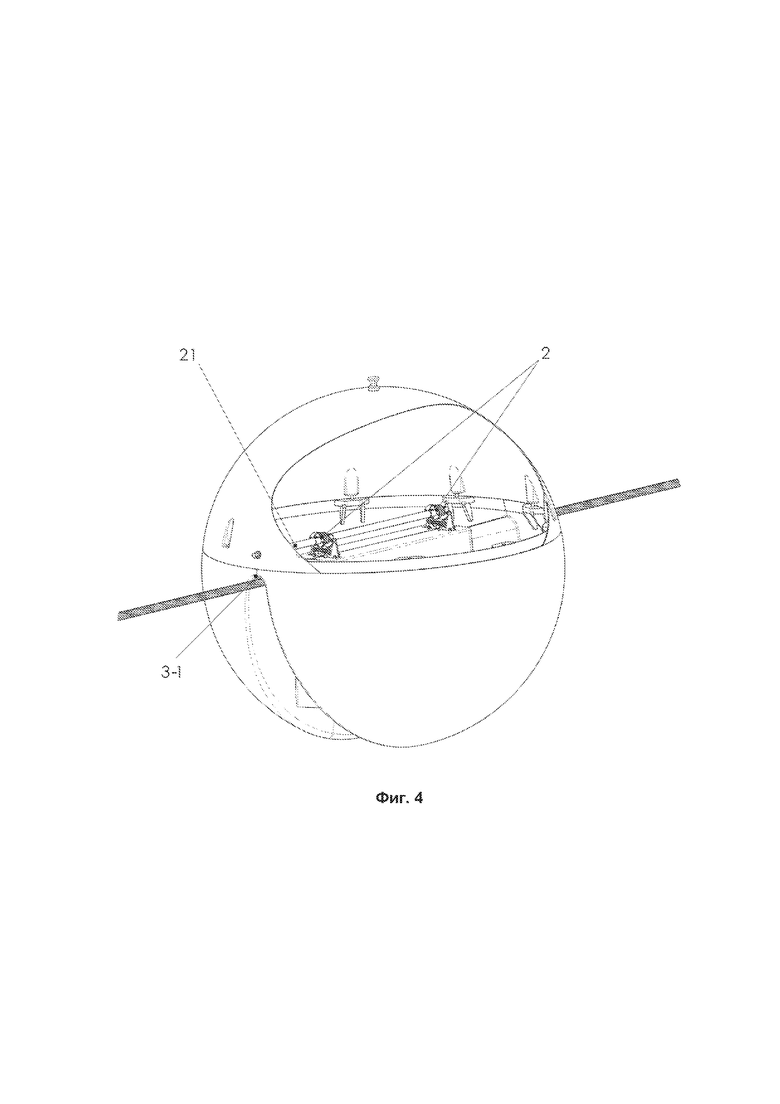
Фиг.4 – Общий вид маркера, закрепленного на проводе;
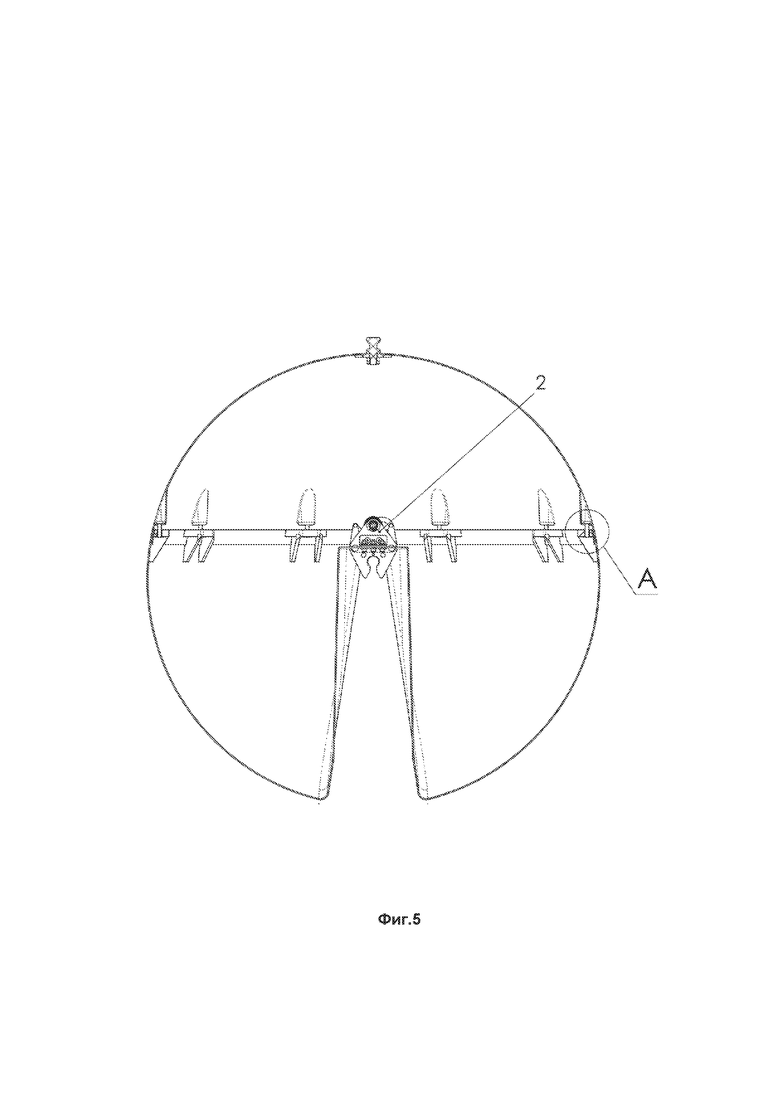
Фиг. 5 – поперечное сечение маркера с видом на один зажим;
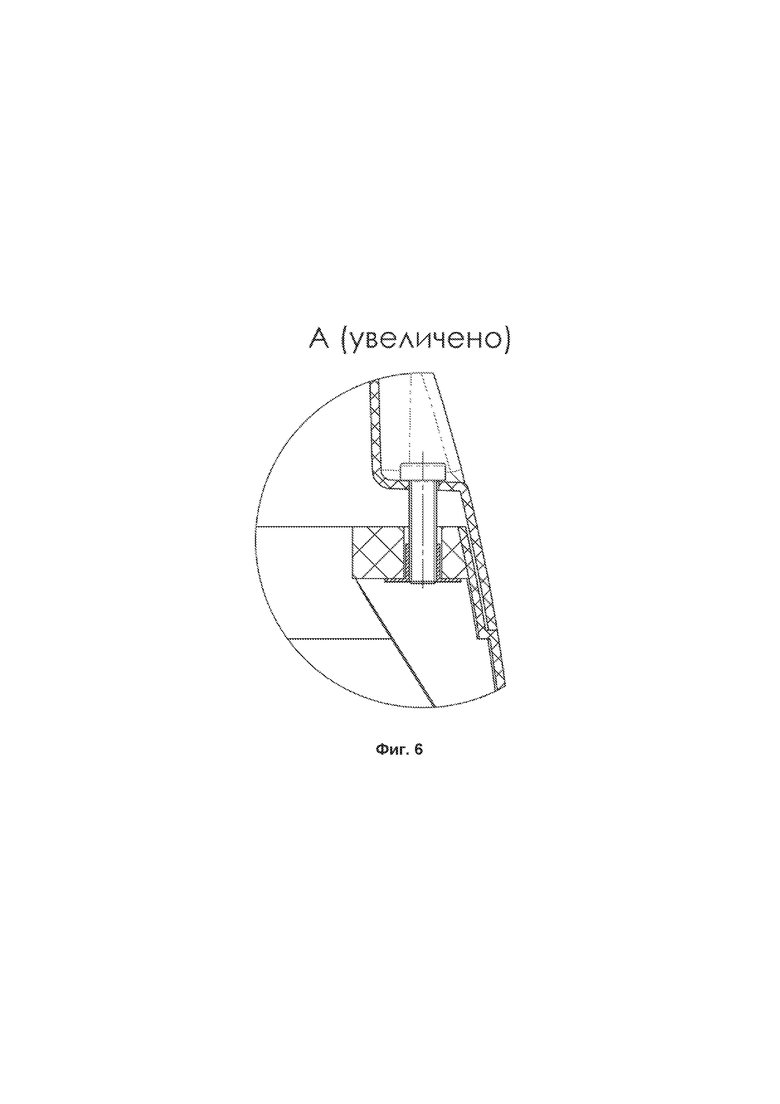
Фиг. 6 – вид А фиг. 5;
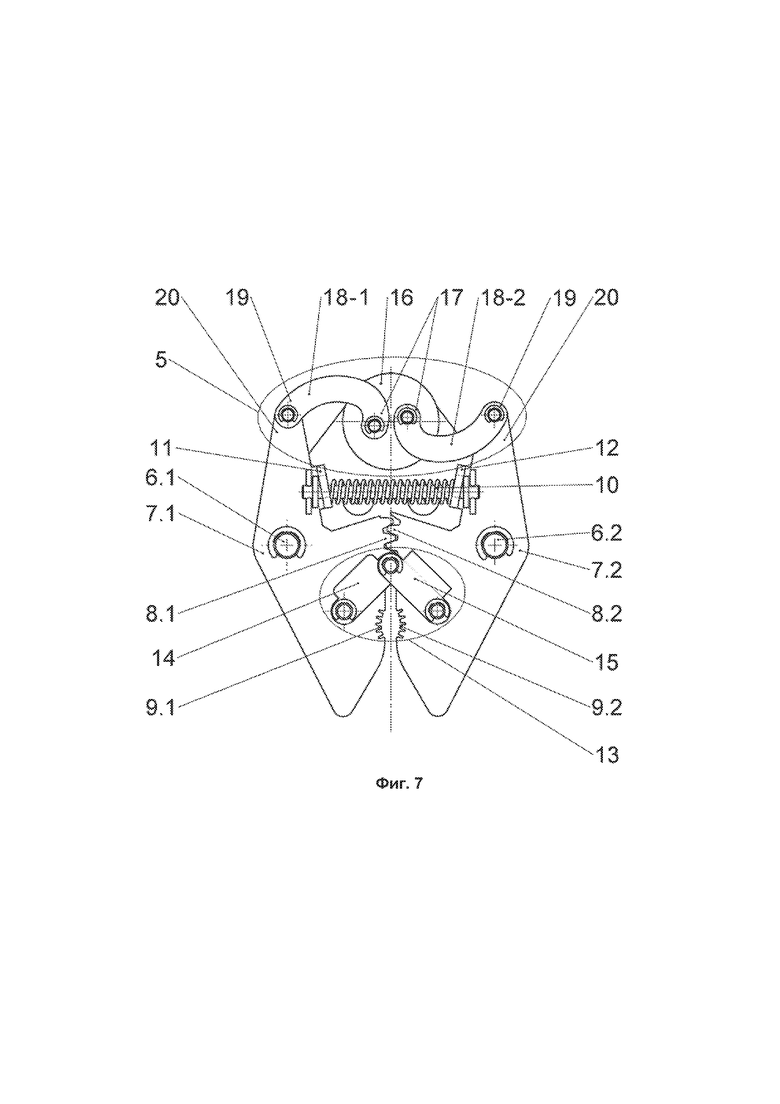
Фиг. 7 – вид спереди на зажим;
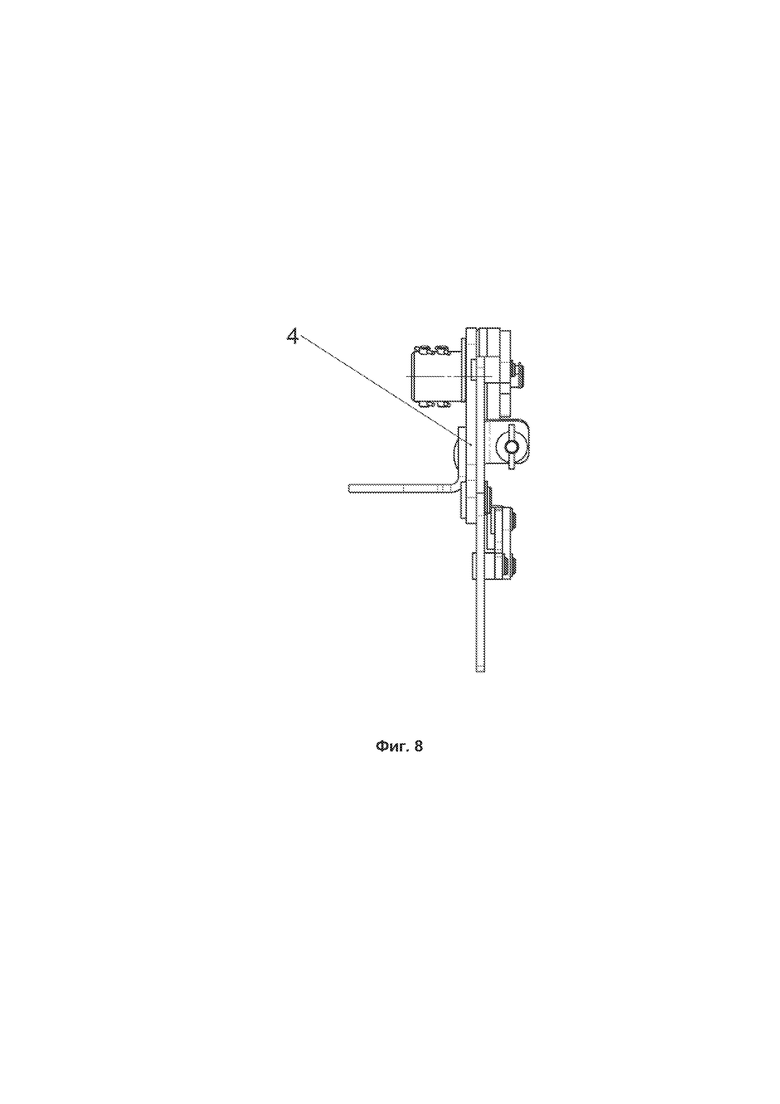
Фиг. 8 – вид сбоку на зажим;
Фиг. 9 - зажим в положение взвода;
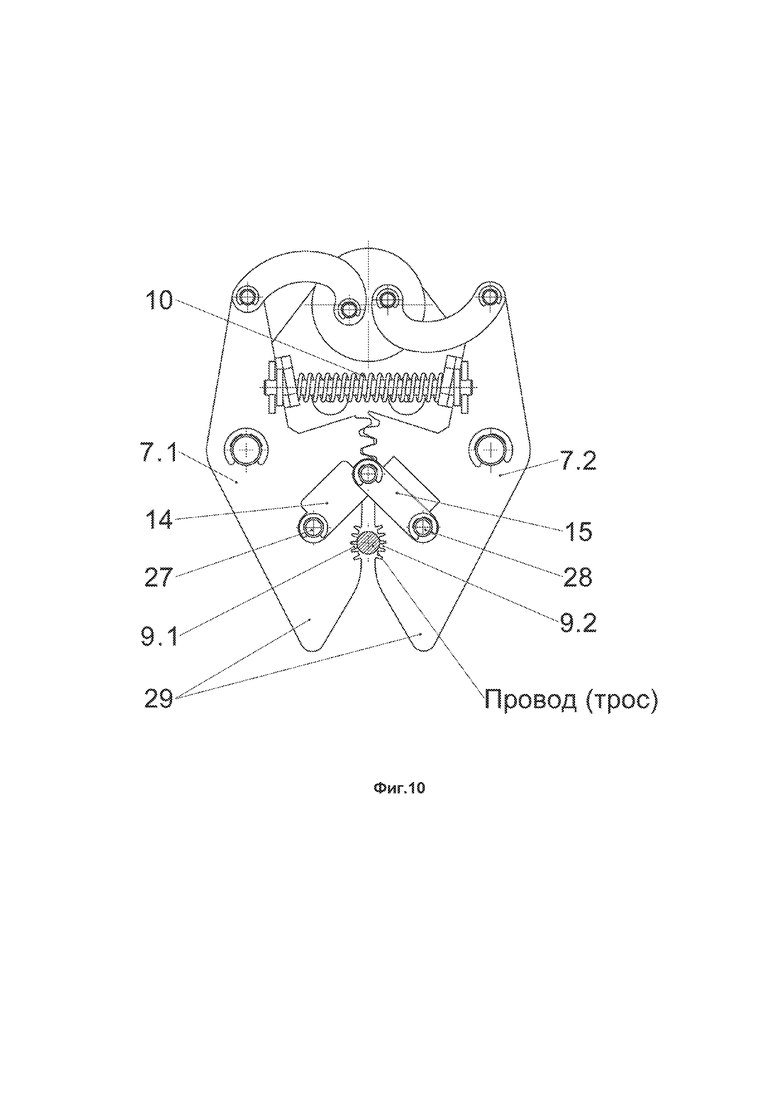
Фиг.10 – зажим в закрытом положение;
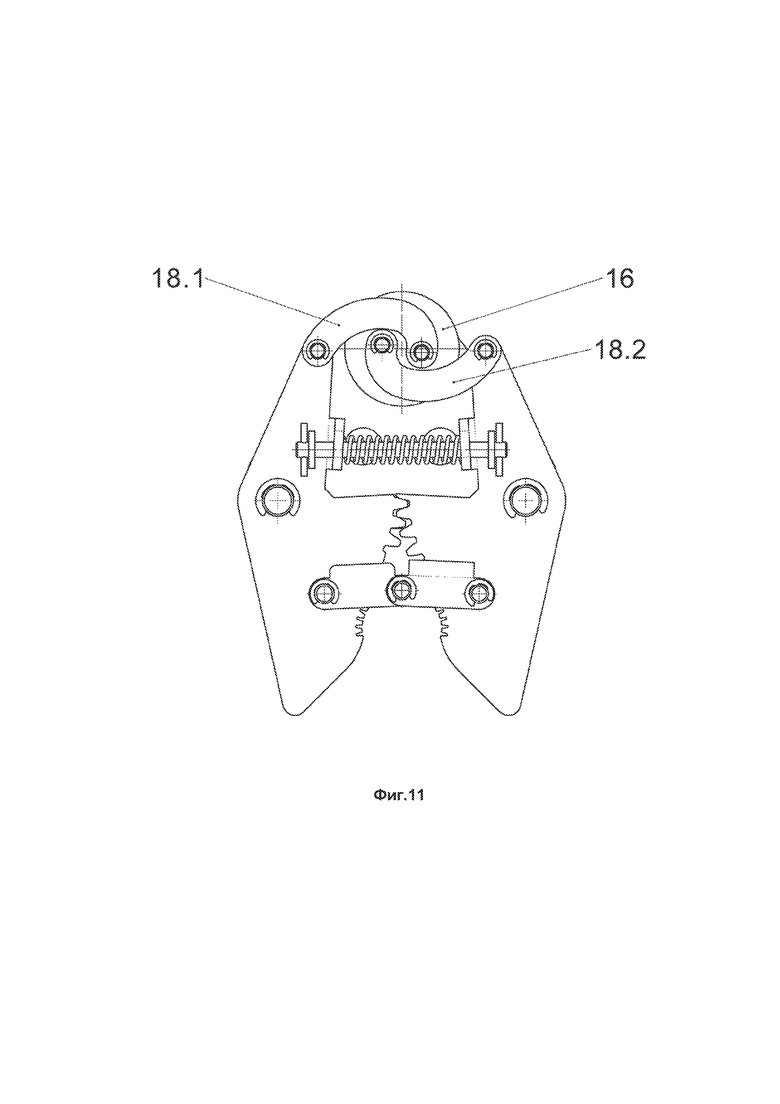
Фиг.11 – зажим в положении устойчивого раскрытия.
Заявляемый способ монтажа маркеров, закрепляемых на проводах и молниезащитных тросах воздушных линий электропередачи, с помощью беспилотных летательных аппаратов реализован с использованием следующих устройств: маркера 1, снабженного двумя зажимами 2 (см. фиг.4).
Маркер 1 выполнен в виде разъемного шарообразного элемента, состоящего из верхней части 1-1 и нижней части 1-2. Маркер 1 снабжен установленными в его нижней части 1-2 зажимами 2. В нижней части 1-2 маркера выполнена клиновидная прорезь 3. Для предотвращения вращения шара вокруг провода вес маркера распределен таким образом, что центр тяжести О1 маркера расположен на расстоянии от 0,02 до 0,2 радиуса R ниже опорной поверхности 3-1 клиновидной прорези 3. За счет этого при закреплении маркера на проводе осевая линия обозначаемого маркером провода или молниезащитного троса О2 расположена выше геометрического центра маркера, совпадающего с центром тяжести О1 шарообразного элемента.
Зажимы 2 выполнены подпружиненными, автоматического действия с возможностью запирания в разомкнутом состоянии. Конструкция зажимов 2, установленных в маркере 1, одинакова, поэтому описан один из зажимов. Зажим 2 содержит несущий элемент 4 (см. фиг. 6), на котором закреплены механизм принудительного раскрытия 5 и две оси 6-1, 6-2. На осях 6-1, 6-2 установлены захваты 7-1, 7-2, выполненные с возможностью поворота относительно осей 6-1 и 6-2 соответственно. Захваты 7-1, 7-2 снабжены сопрягаемыми зубчатыми секторами 8-1, 8-2 и приемными вырезами 9-1, 9-2, расположенными на нижних концах захватов 7-1, 7-2 под зубчатыми секторами. Приемные вырезы 9-1, 9-2 при соединении захватов 7-1, 7-2 образуют отверстие в форме окружности. В верхней части каждый из захватов 7-1, 7-2 соединен с механизмом принудительного раскрытия 4. Между захватами 7-1, 7-2 установлена пружина сжатия 10, закрепленная на опорах 11, 12, жестко соединенных с захватами 7-1, 7-2. Зажим 2 снабжен элементом срабатывания 13, выполненным в виде спускового механизма. Спусковой механизм состоит из двух коромысел 14, 15, шарнирно соединённых между собой и с захватами 7-1, 7-2 (см. фиг. 7, 9, 10, 11).
Зажимы 2 установлены в нижней части 1-2 маркера на расстоянии друг от друга (см. фиг. 4). Зажимы 2 установлены так, что нижние концы 16-1, 16-2 захватов 7-1, 7-2 и коромысла 14, 15 находятся в клиновидной прорези 3 и обеспечивают фиксацию провода или троса .
Механизм принудительного раскрытия 5 каждого из зажимов 2 выполнен в виде диска-кривошипа 16 с закреплёнными на нем шарнирно первыми концами 17 дугообразных тяг 18-1, 18-2, другие концы 19 тяг шарнирно соединены с верхними частями 20 захватов 7-1, 7-2.
Диск-кривошип 16 механизма принудительного раскрытия 5 каждого из зажимов жёстко соединён с валом 21, свободный конец которого выходит за пределы наружной поверхности маркерного шара и имеет форму поверхности, обеспечивающую возможность поворота посредством гаечного ключа (см. фиг.2). За счет соединения зажимов 2 с валом 21 обеспечивается взаимосвязь указанных зажимов между собой и согласованное управление зажимами при разблокировке для снятия маркера.
Способ заключается в выполнении последовательности следующих операций:
В ручном режиме управления или в автоматическом режиме управления при помощи бортового компьютера по радиосигналу сначала захватами 22, которые закрепляются на несущей конструкции беспилотного летательного аппарата (БПЛА) 23, удерживают (жестко фиксируют) маркер 1 в его верхней части 24 (см. фиг. 1).
Предварительно зажимы 2 маркера 1 приводятся в положение взвода (фиг.5). Для этого с помощью вала 21 нужно повернуть диск-кривошип 16 против часовой стрелки в плоскости вида механизма, соответствующего изображению на фиг. 7, 9, 10, 11, в результате чего захваты 7-1, 7-2 двух зажимов синхронно поворачиваются вокруг осей 6-1, 6-2. В это время закрепленные на захватах 7-1, 7-2 коромысла 14, 15 спускового механизма, соединенные между собой через ось 24, поворачиваются, так что ось 24 соединения коромысел опускается в крайнее нижнее положение (см. фиг. 9). Спусковой механизм удерживается в положении взвода за счёт упирающихся друг в друга выступов 25, 26, выполненных на коромыслах 14, 15 спускового механизма, с одной стороны, и силы упругости пружины сжатия 10 - с другой стороны.
По радиосигналу включают электродвигатели с винтами-пропеллерами, имеющимися на несущей конструкции БПЛА 23, поднимают маркер 1 и транспортируют его к месту монтажа на воздушную линию электропередачи. При этом маневрируют беспилотным летательным аппаратом 23 таким образом, чтобы он завис над проводом или молниезащитным тросом воздушной линии электропередачи в положении, когда провод или молниезащитный трос располагаются под клиновидной прорезью 3 маркера 1. После этого дают команду на сброс и БПЛА 23, освобождая захваты 22, сбрасывает маркер 1 на провод или трос.
При попадании провода или троса в клиновидную прорезь 3 маркера 1, провод (трос) контактирует с коромыслами 14, 15 спускового механизма (происходит удар провода о коромысла 14, 15 в точке их соединения между собой) и спусковой механизм срабатывает. Коромысла 14, 15 поворачиваются вверх относительно осей 27, 28 и освобождают захваты 7-1, 7-2, которые также начинают поворачиваться под воздействием силы натяжения пружины сжатия 10. Нижние концы 29 захватов 7-1, 7-2 смыкаются, и провод фиксируется в отверстии, образованном приемными вырезами 9-1, 9-2 (см. фиг. 10). Маркер зафиксирован на проводе. За счет выполнения маркера, с центром тяжести О1 расположенным на расстоянии от 0,02 до 0,2 радиуса R ниже опорной поверхности 3-1 клиновидной прорези 3, при закреплении маркера на проводе осевая линия обозначаемого маркером провода или молниезащитного троса О2 расположена выше геометрического центра маркера, совпадающего с центром тяжести О1 шарообразного элемента. Таким образом, предотвращается несанкционированный поворот маркера 1 вокруг провода и его падение до момента замыкания зажимов 2 и обеспечивается стабильное положение маркера в процессе эксплуатации.
Если центр тяжести будет расположен на рсстоянии менее 0,02 R от опорной поверхности 3-1 клиновидной прорези, маркер может перевернуться на проводе, осадки попадут в зажимы 2, что приведет к выводу их из строя. Если центр тяжести будет расположен на рсстоянии более 0,2 R от опорной поверхности 3-1 клиновидной прорези, под действием ветра маркер может раскачиваться. При этом зажимы 2 будут перетирать провод. Выбор диапазона также продиктован отраслевыми требованиями, которые предписывают, чтобы провод или трос проходил по центру маркера.
После завершения процесса сбрасывания маркера 1, беспилотный летательный аппарат 23 транспортируют к месту его стоянки.
На несущей конструкции беспилотного летательного аппарата 23 могут быть закреплены 4÷16 электродвигателей с винтами-пропеллерами, обеспечивающих грузоподъемность беспилотного летательного аппарата в пределах 1÷15 кг.
Чтобы обеспечить снятие маркерного устройства с провода на время обслуживания линии зажимы 2 приводят в устойчивое раскрытое положение с помощью вала 21, поворачивая диск-кривошип 16 по часовой стрелке в плоскости вида механизма, соответствующего изображению на фиг. 7, 9-11, до упора. При этом сила упругости пружины сжатия, благодаря специальной конструкции дугообразных тяг 18-1, 18-2, работает на удержание зажима. За счёт того, что тяги 18-1, 18-2 имеют дугообразную форму, при повороте линия осей тяг и диска-кривошипа 16 переходит в отрицательный угол, после чего пружина начинает проворачивать диск-кривошип 16 уже в другую сторону. При этом дугообразные тяги упираются друг в друга.
Предлагаемый способ монтажа маркеров, закрепляемых на проводах и молниезащитных тросах воздушных линий электропередачи, с помощью беспилотных летательных аппаратов позволяет существенно облегчить и упростить процесс монтажа.
Установка маркеров на проводах и тросах воздушных линий электропередачи оговорена в Руководство по эксплуатации гражданских аэродромов Российской Федерации (РЭГА РФ-94), утвержденное приказом Минтранса России от 19.09.1994 N ДВ-98, и служит для обеспечения предупреждения пилотов воздушных судов о прохождении проводов и молниезащитных тросов воздушных линий электропередачи, а также позволяет предотвращать столкновение птиц с проводами и молниезащитными тросами, исключая при этом их гибель. Реализация заявляемого способа наиболее актуальна при прохождении воздушных линий электропередач в труднодоступных местных условиях (переходы через водные препятствия, горная местность, интенсивная городская застройка и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНТАЖА МАРКЕРОВ, ЗАКРЕПЛЯЕМЫХ НА ПРОВОДАХ И МОЛНИЕЗАЩИТНЫХ ТРОСАХ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ, С ПОМОЩЬЮ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ВАРИАНТЫ) | 2016 |
|
RU2644420C1 |
| ПИРОТЕХНИЧЕСКИЙ ЗАЖИМ | 2019 |
|
RU2729644C1 |
| Способ установки оборудования на провод и устройство для его осуществления | 2023 |
|
RU2828832C1 |
| Сигнальный шар-маркер, способ его монтажа на воздушную линию электропередачи и устройство для его осуществления | 2021 |
|
RU2785006C1 |
| Устройство для зарядки БПЛА от провода воздушной линии электропередачи | 2023 |
|
RU2811167C1 |
| СВЕТОВОЙ МАРКЕР ДЛЯ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2014 |
|
RU2556702C1 |
| Робототехнический комплекс и способ его эксплуатации на высотных объектах, относящихся к электроэнергетике и радиосвязи | 2019 |
|
RU2715682C1 |
| ГАСИТЕЛЬ ВИБРАЦИИ | 2018 |
|
RU2714299C1 |
| УСТРОЙСТВО ДИАГНОСТИКИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ И ЕГО КОМПОНЕНТ | 2014 |
|
RU2558002C1 |
| Сигнальный шар-маркер, способ его демонтажа с воздушной линии электропередачи и устройство для его осуществления | 2021 |
|
RU2778136C1 |

Изобретение относится к области электроэнергетики, а более конкретно к способам монтажа маркеров, закрепляемых на проводах и молниезащитных тросах воздушных линий электропередачи, с помощью беспилотных летательных аппаратов. Вышеуказанные маркеры применяются для предупреждения пилотов воздушных судов о прохождении проводов и молниезащитных тросов воздушных линий электропередачи, а также для предотвращения столкновения птиц с проводами и молниезащитными тросами. Способ монтажа маркеров осуществляется с помощью беспилотных летательных аппаратов (БПЛА). Регулируемыми захватами, закрепленными на несущей конструкции БПЛА, удерживают маркер, затем по радиосигналу включают электродвигатели с винтами-пропеллерами, поднимают маркер и транспортируют его к месту монтажа. После позиционирования БПЛА над проводом или молниезащитным тросом освобождают захват и сбрасывают на провод или трос маркер, имеющий клиновидную прорезь в нижней части, осуществляя первоначальный захват провода или троса маркером, с последующей автоматической фиксацией маркера посредством зажимов. Технический результат заключается в упрощении захвата, позиционировании и фиксации маркера. 3 н. и 3 з.п. ф-лы, 11 ил.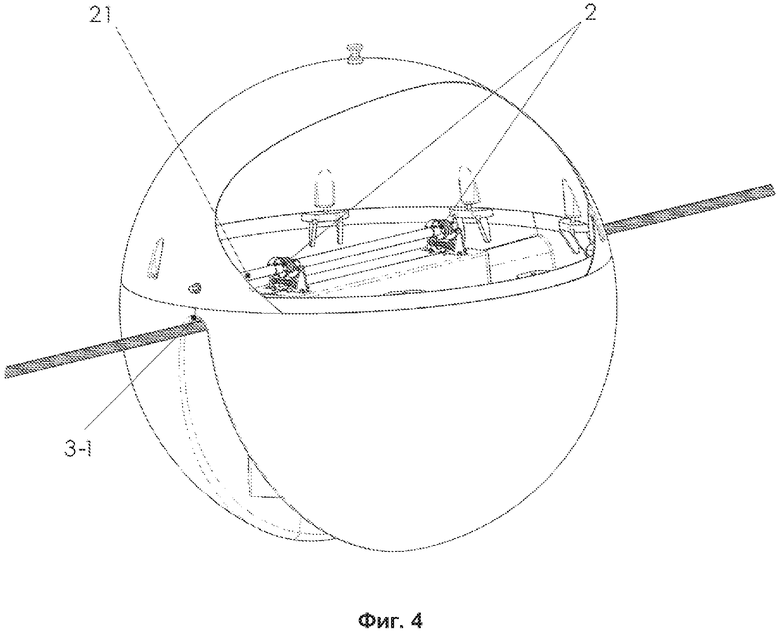
1. Способ монтажа маркеров, закрепляемых на проводах и молниезащитных тросах воздушных линий электропередачи, с помощью беспилотных летательных аппаратов, заключающийся в том, что в ручном режиме управления или в автоматическом режиме управления при помощи бортового компьютера по радиоканалу регулируемыми захватами, закрепленными на несущей конструкции беспилотного летательного аппарата, удерживают маркер, затем по радиосигналу включают электродвигатели с винтами-пропеллерами, поднимают маркер и транспортируют его к месту монтажа, при этом маневрируют беспилотным летательным аппаратом таким образом, чтобы он завис в положении, когда провод или молниезащитный трос линии электропередач располагаются под нижней прорезью, выполненной в маркере, отличающийся тем, что после позиционирования беспилотного летательного аппарата над проводом или молниезащитным тросом освобождают захват и сбрасывают на провод или трос маркер, имеющий клиновидную прорезь в нижней части, осуществляя первоначальный захват провода или троса маркером, с последующей автоматической фиксацией маркера посредством зажимов.
2. Маркер, выполненный в виде шарообразного элемента, имеющего установленный в нем зажим и прорезь, выполненную в нижней части маркера, отличающийся тем, что маркер выполнен разъемным, снабжен дополнительным зажимом, взаимосвязанным с первым зажимом, прорезь в нижней части маркера выполнена клиновидной, а центр тяжести шарообразного элемента расположен на расстоянии от 0,02 до 0,2 радиуса ниже опорной поверхности клиновидной прорези.
3. Маркер по п. 2, отличающийся тем, что зажимы выполнены подпружиненными, автоматического действия с возможностью запирания в разомкнутом состоянии.
4. Зажим маркера, содержащий несущий элемент, на котором закреплены механизм принудительного раскрытия и две оси, на которые установлены захваты, выполненные с возможностью поворота относительно указанных осей, захваты снабжены сопрягаемыми зубчатыми секторами и приемными вырезами, расположенными под зубчатыми секторами; в верхней части каждый из захватов соединен с механизмом принудительного раскрытия, при этом между захватами установлена пружина сжатия, закрепленная на опорах, жестко соединенных с захватами, зажим снабжен элементом срабатывания, выполненным в виде спускового механизма, представляющего собой два коромысла, шарнирно соединённых между собой и с захватами.
5. Зажим по п. 4, отличающийся тем, что механизм принудительного раскрытия выполнен в виде диска-кривошипа с закреплёнными на нем шарнирно первыми концами дугообразных тяг, другие концы которых шарнирно соединены с верхними частями захватов.
6. Зажим по пп. 4, 5, отличающийся тем, что диск-кривошип механизма принудительного раскрытия жёстко соединён с валом поворота диска-кривошипа.
| СПОСОБ МОНТАЖА МАРКЕРОВ, ЗАКРЕПЛЯЕМЫХ НА ПРОВОДАХ И МОЛНИЕЗАЩИТНЫХ ТРОСАХ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ, С ПОМОЩЬЮ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ВАРИАНТЫ) | 2016 |
|
RU2644420C1 |
| ЗАЖИМ ДЛЯ КРЕПЛЕНИЯ ИЗДЕЛИЯ | 1999 |
|
RU2177567C2 |
| СПОСОБ МОНТАЖА ПРОВОДА С ПОМОЩЬЮ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1996 |
|
RU2091944C1 |
| GB 1451919 A, 06.10.1976. | |||

