Заявляемая группа изобретений относится к устройствам и способам эксплуатации, подъема и спуска специализированного технологического оборудования на высотные инженерные объекты входящие в инфраструктуру электроэнергетики и радиосвязи для проведения диагностики, ремонта, замены и обслуживания силовых проводов воздушных линий электропередач, ветрогенераторов, элементов конструкции опор, вышек сотовой и радиосвязи, а также для размещения на высотных объектах мобильного, самодвижущегося и стационарного технологического оборудования, а также для выполнения страховки и подъема персонала для проведения сервисных и аварийно-ремонтных работ.
Известны устройства для диагностики воздушных линий электропередач раскрыты в патентах (CN106741942, МПК В64С39/02, 31.05.2017), (KR101735743, МПК B64C39/02, 15.05.2017), (RU2558002, МПК G01R 31/08, 27.07.2015), и предназначены для проведения контактного мониторинга силовых проводов воздушных ЛЭП применяется аппаратура поднимаемая в воздух посредством БПЛА.
Недостатком перечисленных устройств является невозможность проведения диагностики с использованием оборудования масса которого превышает грузоподъемность БПЛА, указанные устройства взаимодействуют только с проводами ЛЭП и не предусмотрены для выполнения других видов сервисных и аварийных работ, подъем тяжелой аппаратуры приведет к сложности позиционирования и управления при посадки на провод.
Наиболее близким по технической сущности является устройство диагностики воздушных линий электропередач (Патент US20060114122, МПК H04Q 9/00, H02G 1/02, 15.05.2003), которое содержит систему управления, устройства контроля воздушных линий электропередач, подключенные к аккумулятору, размещенную в корпусе и соединенную с двигателем систему привода, выполненную с возможностью фиксации положения устройства для диагностики относительно грозозащитного троса или силового провода и обеспечения его перемещения вдоль воздушных линий электропередач. Устройство для диагностики воздушных линий электропередач содержит летательный аппарат вертолетного типа, подключенный к аккумулятору, включающий систему управления.
К недостаткам устройства следует отнести невозможность поднимать технологическое оборудование с весом большим чем грузоподъемность БПЛА, воздушная транспортировка технологического груза и его позиционирование для посадки на провод приведет к большим энергетическим потерям и низкой устойчивостью в полете, используется только для установки на грозозащитном тросе или силовом проводе и не предназначено для взаимодействия с другими элементами опор ЛЭП и элементами радио вышек, технологическое оборудование не предназначено для выполнения других монтажных, сервисных и аварийных работ, для замены технологического оборудования требуется активировать БПЛА и заново выполнить взлет и стыковку.
Задачей предлагаемого изобретении является разработка роботизированного комплекса для эксплуатации на инженерных высотных объектах входящих в систему электроэнергетики и радиосвязи, обеспечивающего доставку на высоту тяжелого технологического оборудования с массой, превышающей грузоподъемность применяемого БПЛА; подъем технологического оборудования с габаритами и формой, затрудняющими транспортировку стандартными БПЛА.
Еще одной задачей является разработка нового способа поэтапного подъема технологического оборудования на инженерные высотные объекты с использованием БПЛА.
Другой задачей является удерживание технологического оборудования на выбранной оператором высоте от поверхности земли без привлечения БПЛА и без непосредственного контакта технологического оборудования с посадочной площадкой высотного объекта; расширение зон и участков высотных объектов, где возможно применение робототехнического комплекса; расширение круга выполняемых технических и эксплуатационных задач; а также с возможностью выполнения транспортировки технологического оборудования с высоты посадочной площадки на поверхность земли для проведения сервиса технологического оборудования без привлечения для этой операции БПЛА; перенос технологического оборудования через инженерные препятствия высотного объекта без использования подъема в воздух технологического оборудования посредством тяги БПЛА.
Еще одной задачей является возможность автоматизации выполнения многих видов работ на инженерных высотных объектах, повышение безопасности и исключение человеческого фактора, уменьшение эксплуатационных расходов, сокращение парка наземного подъемного оборудования.
Другие задачи и преимущества настоящего изобретения станут более очевидными ниже в описании и чертежах.
Технический результат - расширение арсенала и функциональных возможностей беспилотников применяемых для контактного обслуживания воздушных линий электропередач, а также расширение ассортимента технологического оборудования для эксплуатации на высотных объектах входящих в систему электроэнергетики и радиосвязи.
Указанный технический результат достигается тем, что в предлагаемом робототехническом комплексе, входящем в систему электроэнергетики и радиосвязи, состоящего из основной станции, беспилотного летательного аппарата (БПЛА), технологического оборудования, поднимаемого на посадочную площадку высотного объекта, системы дистанционного управления, наблюдения и навигации, при этом на БПЛА установлены по меньшей мере одна грузовая платформа, которая снабжена элементами соединения с посадочной площадкой высотного объекта, гибкая система подвески, которая обеспечивает кинетическую связь грузовой платформы с технологическим оборудованием с возможностью его заданного перемещения относительно грузовой платформы, по меньшей мере одно подъёмно-спусковое устройство с электрическим движителем, взаимодействующее с гибкой системой подвески, а управление подъёмно-спусковым устройством обеспечивается электронным блоком управления, при этом, по меньшей мере, на одном из устройств комплекса установлен стыковочно-разъединяемый узел, обеспечивающий возможность взаимодействия с другими устройствами комплекса или с посадочной площадкой высотного объекта.
В заявляемом робототехническом комплексе основная станция выполняет роль командного пункта, обеспечивающего дистанционное управление и контроль за работой комплекса. В некоторых вариантах основная станция дополнительно выполняет роль базы для дислокации комплекса, источник электрического напряжения, площадки для размещения и установки технологического оборудования или для других задач. Основная станция, может быть представлена следующими типами: «наземная» - размещена в сооружениях гражданского или промышленного назначения, «передвижная» - на автомобильном или другом транспортном средстве; «переносная» - представлена в виде модуля переносимого оператором.
Высотные инженерные объекты, входящие в систему электроэнергетики и радиосвязи - это воздушные линий электропередач, ветрогенераторы, опоры ЛЭП, вышки сотовой и радиосвязи и другие технологические сооружения имеющие значительное возвышение над землей.
Посадочная площадка высотного объекта – это участок специально оборудованный для посадки БПЛА или участок, позволяющий БПЛА совершить посадку и стыковку с высотным объектом. Это может быть грозозащитный трос, силовой провод, конструктивные элементы опор ЛЭП и вышек радиосвязи и т.п.
Беспилотный летательный аппарат (БПЛА) вертикального взлета и посадки выполняет роль передвигающейся по воздуху системы наблюдения и средства доставки грузовой платформы на площадку высотного объекта. Конструкция БПЛА может быть выполнена в виде мультикоптера, конвертоплана, вертолета, летающего крыла типа «tail-sitter» или другое известное устройство, обеспечивающее управляемый вертикальный взлет и посадку или зависание в воздухе. В фюзеляже БПЛА размещаются движитель, элементы управления, наблюдения, навигации и другая полезная нагрузка. Движитель может быть представлен импеллером, вентилятором, ротором с приводом от электродвигателя, двигателя внутреннего сгорания, реактивной турбины или другим известным устройством. Электропитание двигателей и других систем может осуществляться от аккумуляторов установленных на БПЛА, или по силовому кабелю от источника напряжения основной станции (генератор эл. тока, аккумуляторы станции и т.п.), или после посадки на линии электропередач осуществляется подзарядка от ЛЭП электромагнитным или другим известным способом. Комплекс может быть оборудован аппаратурой для дистанционного видеонаблюдения, диагностики и составления цифровых карт в зоне высотных объектов.
На БПЛА выполнены элементы соединения с грузовой платформой в виде направляющих, фиксаторов, разъемов или других известных устройств. БПЛА может по команде отсоединятся от грузовой платформы и быть состыкован с другой платформой или с воздуха проводить внешний осмотр и диагностику высотного объекта. При необходимости БПЛА может применяться как выбранный аналог - выполнять установку на высотные объекты небольших по габаритам и весу устройств диагностики. При необходимости фюзеляж БПЛА может быть выполнен трансформируемым например, со складывающимися лучами рамы с винтами или другим способом.. Система электронной стабилизации БПЛА обеспечивает устойчивый полет, анализ работы бортовых устройств, внешних нагрузок и может снабжаться гироскопами, акселерометром, контроллерами, сонаром, GPS-приемником или другими известными устройствами.
Технологическое оборудование для высотных работ представлено разнообразными устройствами и механизмами для решения специальных задач в труднодоступных или опасных участках на высотных инженерных объектах входящих в систему электроэнергетики и радиосвязи. Например, оборудование для мониторинга проводов воздушных линий электропередач, оборудование для проведении монтажных и аварийно-ремонтных операций, натяжной робот для расстановки роликовых блоков, маячки и стационарные устройства диагностики, системы высотной страховки и устройства для подъема персонала, устройства удаления наледи на проводах, механизированные монтерские тележки, устройства для нанесения защитных гидрофобных покрытий или красок, автоматизированные манипуляторы, элементы высотных объектов, мобильные и самодвижущиеся роботы и другие известные устройства. В качестве средств контроля могут быть использованы видеокамеры высокого разрешения, тепловизоры для диагностики состояния силовых проводов, ультрафиолетовые сканеры для диагностики разрядов и короны, лазерные и ультразвуковые сканеры, а также другие известные устройства. Технологическое оборудование соединяется жестко или разъемно с подъёмно-спусковым устройством либо с гибкой системой подвески, а после подъема может состыковываться с грузовой платформой или с посадочной площадкой высотного объекта. Технологическое оборудование может быть установлено на высотном объекте с использованием автоматизированной системы позиционирования и крепления на посадочной площадке. Технологическое оборудование может подниматься на посадочную площадку в несколько этапов например, сначала устанавливается страховочная рама монтажной тележки с движителем, а потом поднимается нижняя часть монтажной тележки с ограждением. Технологическое оборудование может быть представлено в виде группы, взаимодействующих между собой устройств разной конструкции и разного назначения например, робот для перемещения по проводу и устройство для нанесения гидрофобного покрытия. В некоторых вариантах выполнения на технологическом оборудовании может монтироваться дополнительный БПЛА или/и дополнительная гибкая подвеска, например для обхода по проводу изоляторов и креплений на опоре ЛЭП.
Управление робототехническим комплексом может осуществляться дистанционно по проводам, радиоуправлению, лазеру, инфракрасному излучению или другим известным способом. Система управления может быть централизованной или непосредственно для каждого устройства, входящего в комплекс. Управление осуществляется с участием человека или без участия человека в контуре управления, в автономном режиме, с использованием машинного зрения, программируемого маршрута, адаптивного управления, с применением искусственного интеллекта или другим известным способом.
Грузовая платформа служит для установки гибкой системы подвески, соединения с БПЛА, размещения элементов соединения с посадочной площадкой высотного объекта. В некоторых вариантах выполнения на грузовой платформе могут быть изначально установлено подъемно-спусковое устройство, направляющие и блоки для перемещения гибкой подвески, крепления для жесткого соединения с одним из концов гибкой подвески, мобильные устройства для управляемого перемещения по посадочной площадке высотного объекта, подвижные каретки, выдвижные стыковочные штанги и другие известные устройства. Грузовая платформа может иметь жесткое соединение или разъёмное соединение с фюзеляжем БПЛА, или грузовая платформа выполнена с возможностью автоматической расстыковки. В других вариантах выполнения на БПЛА может быть установлено несколько грузовых платформ, например для переноса комплекса через преграду. Форма выполнения грузовой платформы в виде шасси, стойки, рамы, корпусного элемента или в виде других известных устройств.
Элементы соединения на грузовой платформе служат для сцепления с посадочной площадкой и перераспределяют нагрузку на высотный объект от поднимаемого на высоту технологического оборудования. Элементы соединения обеспечивают жесткую установку грузовой платформы (например, для установки стационарных элементов на опоре ЛЭП), или подвижное соединение, позволяющее перемещаться платформе по посадочной площадке (например, передвигаться на роликах по проводам), или взаимодействовать с устройствами управляемого перемещения по посадочной площадке высотного объекта (например, самодвижущаяся монтерская кабина). В некоторых случаях элементы соединения могут быть представлены в виде разъемных крепежей (например, болтовое соединение с применением автоматизированных монтажных устройств), карабинами, скобами, роликами, упорами, крюками, петлями, гибкими лентами с упорами, тормозными колодками, фиксаторами или другими известными устройствами, обеспечивающие удержание робототехнического комплекса на заданной высоте. Для обеспечения надежности соединения элементы соединения с посадочной площадкой могут быть оборудованы дистанционно-управляемыми автоматизированными стыковочными узлами. В зависимости от типа посадочной площадки высотного объекта (например, провод или ферма вышки) грузовая платформа может иметь разные или сменные элементы соединения и фиксации, а также элементы соединения могут размещаться над БПЛА, под ним или сбоку. В других вариантах выполнения на грузовой платформе может быть установлен мобильный блок с собственным движителем и системой питания и управления, позволяющий управляемо перемещаться по посадочной площадке высотного объекта. В других вариантах выполнения дополнительно на грузовой платформе может быть установлено автоматизированное устройство, служащее для соединения технологического оборудования с посадочной площадкой (например, установленные на грузовой платформе механизмы жестко фиксируют на опоре диагностическую аппаратуру) и могут быть представлены механизмами фиксации, свинчивания, скручивания, склейкой, сваркой деталей и другими известными устройствами. В других вариантах выполнения элементы соединения одновременно взаимодействуют с несколькими посадочными площадками (например, установлены на 3-х разных проводах).
Гибкая система подвески служит для перемещения технологического оборудования в направлении к грузовой платформе, установленной на посадочной площадке высотного объекта и для спуска технологического оборудования на землю, для взаимодействия с подъёмно-спусковое устройством. После взлета БПЛА и установки грузовой платформы на посадочной площадке один конец гибкой системы подвески соединен с грузовой платформой, а другой конец подается вниз к земле или изначально закреплен на поверхности земли (на основной станции), или соединен с подъемным механизмом, или соединен с технологическим оборудованием, или закреплен другим известным способом. В некоторых вариантах выполнения гибкая система подвески может быть представлена в виде бесконечной ленты проходящей через подвесной блок на грузовой платформе, или в виде группы канатов поднимающих и стабилизирующих положение технологического оборудования на весу, или трос намотанный на барабан лебедки, или установлено другим известным способом. В других вариантах выполнения гибкая система подвески может взаимодействовать одновременно с двумя и более грузовыми платформами для установки на разнесенных посадочных площадках. В других вариантах выполнения гибкая система подвески может включать в себя электрические провода для дистанционного управления и/или передачи напряжения от внешнего источника электроэнергии к устройствам роботизированного комплекса. Гибкая система подвески может состоять из роликов, полиспастов, подвижных и неподвижных блоков огибаемых тросом, направляющих, электрических проводов, струн, цепей, веревок, лесок, поводков, тросов, изолирующих полипропиленовых канатов и других известных устройств.
Подъёмно-спусковое устройство служит для взаимодействия с гибкой системой подвески и как следствие - управляемого перемещения технологического оборудования. Предпочтительно, подъёмно-спусковое устройство использует электрический движитель, или в некоторых случаях может использоваться ДВС или другие известные устройства. Подъёмно-спусковое устройство может быть установлено на грузовой платформе, или на основной станции, или на грунте у основания высотного объекта или закрепляется на гибкой системе подвески, или установлено в кузове управляемого или беспилотного автотранспорта или установлено другим известным способом. Подъёмно-спусковое устройство может быть представлено в виде аккумуляторной лебедки (электрожумар), электрической тали или тельфера, монтажно-тягового механизма или другим известным устройством. Подъёмно-спусковое устройство может состоять из: электродвигателя, редуктора, сокращающего обороты мотора и обеспечивающего плавность хода, предохранительной муфты, барабана, сматывающего или разматывающего трос, регулирующего положение груза, корпуса, защищающего механизмы от внешних воздействий, крюка за который подвешивается технологическое оборудование, аккумуляторной батареи и системы управления. В других вариантах выполнения подъёмно-спусковое устройство может содержать 2 и более лебедки. Подъёмно-спусковое устройство может быть установлено на грузовой платформе и наматывать трос на свой барабан - тем самым поднимает/опускает технологическое оборудование, или оставаясь на грунте подъёмно-спусковое устройство перемещает трос через блоки грузовой платформы - тем самым транспортирует технологическое оборудование, или подъёмно-спусковое устройство посредством подвижных и прижимных роликов само перемещается по гибкой системе подвески при этом соединенной с грузовой платформой, или подъёмно-спусковое устройство первоначально поднимается по подвеске к грузовой платформе с использование первой лебедки, а затем опускает трос от второй лебедки для подъема технологического оборудования или действует другим известным способом.
Электронный блок управления служит для включения или остановки подъёмно-спускового устройства. Управление подъёмно-спусковым устройством может быть представлено электронным устройством с пультом управления на корпусе подъёмно-спускового устройства в варианте его размещения на грунте, в виде дистанционного проводного или беспроводного управления в вариантах установки подъёмно-спускового устройства на грузовой платформе или с возможностью перемещения по тросу или в виде другого известного устройства. Электронный блок управления может быть выполнен как отдельное устройство или быть частью электронного управления комплекса.
Стыковочно-разъединяемые узлы, обеспечивают управляемое соединение или разъединение устройств комплекса между собой или с посадочной площадкой высотного объекта (например, БПЛА и грузовая платформа, подъёмно-спусковое устройство и технологическое оборудование, грузовая платформа и посадочная площадка высотного объекта), для уменьшение вибраций, колебаний, смещений между элементами комплекса при их установки на посадочной площадке. Стыковочно-разъединяемые узлы могут быть представлены как система «штырь-конус», безрезьбовой механизм сцепления, направляющие и фиксаторы, за счет натяжения гибкой системы подвески подъёмно-спусковым устройством, сервоприводом, магнитным замком или другим известным устройством. Также могут быть выполнены электрические разъемы для соединения/разъединения между собой электрических схем основных элементов комплекса (для распределения электроэнергии и т.п.).
Заявляемый робототехнический комплекс работает следующим образом (вариант).
При подачи команды оператора с основной станции активируется БПЛА (с грузоподъемностью Z килограмм) и вместе с установленной грузовой платформой и закрепленным одним концом гибкой подвески (трос) перемещается по воздуху на необходимую высоту к посадочной площадке высотного объекта (например, на силовой провод ЛЭП), на земле находится подъёмно-спусковое устройство к которому прикреплено технологическое оборудование (например, автоматизированная монтерская тележка массой Z+X килограмм), другой конец троса соединен с электролебедкой подъёмно-спускового устройства, грузовая платформа закрепляется своими элементами соединения на силовом проводе, БПЛА расстыковывается с грузовой платформой и возвращается на землю, по команде оператора на блок управления подъёмно-спускового устройства начинается взаимодействие с гибкой системой подвески (за счет наматывания троса на барабан лебедки) и подъёмно-спусковое устройство вместе с технологическим оборудованием поднимается по направлению к грузовой платформе, автоматизированная монтерская тележка устанавливается на проводе высотного объекта, страхуется и сцепляется с грузовой платформой посредством автоматического стыковочно-разъединяемого узла, движитель монтерской тележки позволяет ей задано перемещаться по проводам для посадки/высадки персонала и выполнения сервисных работ.
В другом варианте выполнения робототехнический комплекс после выполнения стыковки с посадочной площадкой (например, на элементе опоры ЛЭП), БПЛА возвращается на землю, а грузовая платформа, подъемно-спусковое устройство, система гибкой подвески и технологическое оборудование остаются на посадочной площадке, дополнительно на подъемно-спусковое устройство установлен блок закодированного дистанционного управления с защитой от несанкционированного использования, технологическое оборудование продолжительное время выполняет на высотном объекте свои функции (например, отслеживает физическое состояние проводов), при поступлении команды оператора с использованием шифрованного радиокода активируется подъемно-спускового устройство в следствии чего на гибкой подвеске спускается технологическое оборудование (например, для передачи данных, ремонта, замены источника питания), после этого технологическое оборудование может быть поднято на верх в исходное положение.
В следующем варианте выполнения робототехнический комплекс после выполнения установки грузовой платформы на посадочной площадке (например, силовой провод) производится подъем технологического оборудования в виде группы взаимодействующих между собой устройств разной конструкции и разного назначения например, монтажного автоматизированного устройства и несколько стационарных маркеров для долговременного жесткого соединения с силовым проводом, в стационарных маркерах выполнены фиксирующие зажимы, монтажное автоматизированное устройство позиционирует на проводе стационарный маркер и по команде приводит в действие свой инструмент, обеспечивающий передачу механических усилий на вышеуказанные зажимы, и путем закручивания крепежных элементов зажимы плотно стягивают разъемные части стационарного маркера, тем самым закрепляя маркер на проводе, при выполнении мобильного устройства для передвижения по проводу на грузовой платформе или на технологическом оборудовании комплекс передвигается на определенную дистанцию и повторяет процедуру уже с другим маркером.
В другом варианте выполнения робототехнический комплекс поднимается в воздух посредством БПЛА на котором установлены две грузовые платформы (1,2) и дополнительные гибкие подвески, комплекс устанавливается на посадочной площадке А с использованием грузовой платформы 1 и ее соединительных элементов, активируется подъемно-спусковое устройство и к посадочной площадке А поднимается технологическое оборудование для выполнения своих функциональных задач, при необходимости преодолеть инженерное препятствие (например, изоляторы опоры ЛЭП), БПЛА расстыковывается с грузовой платформой 1 и переносит грузовую платформу 2 на посадочную площадку D с другой стороны опоры, подъемно-спусковое устройство соединено с технологическим оборудованием, подъемно-спусковое устройство взаимодействует с гибкими подвесками соединенными с грузовыми платформами 1 и 2, вследствие чего технологическое оборудование перемещается с посадочной площадки А на площадку D, при установки технологического оборудования под грузовой платформой 2 происходит освобождение грузовой платформы 1 от веса оборудования, БПЛА переносит грузовую платформу 1 к платформе 2, тем самым завершается переход через изоляторы опоры.
Таким образом, заявляемая конструкция обеспечивает расширение арсенала и функциональных возможностей беспилотников, применяемых для контактного мониторинга сервиса и обслуживания воздушных линий электропередач, а также расширение ассортимента технологического оборудования для эксплуатации на высотных объектах входящих в систему электроэнергетики и радиосвязи.
Сопоставительный анализ заявляемого устройства с прототипом позволяет сделать вывод о том, что заявляемый робототехнический комплекс отличается от известного:
- установкой на БПЛА по меньшей мере одной, грузовой платформы;
- снабжения грузовой платформы элементами соединения с посадочной площадкой высотного объекта;
- установкой гибкой системы подвески;
- обеспечением кинетической связи грузовой платформы с технологическим оборудованием с возможностью его заданного перемещения относительно грузовой платформы;
- выполнением, по меньшей мере, одного подъёмно-спускового устройства с электрическим движителем с возможностью взаимодействия с гибкой системой подвески;
- наличием электронного блока для управления подъёмно-спусковым устройством;
- выполнением технологического оборудования кинетически связанным с грузовой платформой посредством гибкой системы подвески;
- установкой технологического оборудования с возможностью заданного перемещения относительно грузовой платформы;
- установкой по меньшей мере, на одном из устройств комплекса стыковочно-разъединяемого узла.
Заявляемая конструкция обеспечивает:
- доставку на высоту тяжелого технологического оборудования с массой превышающей грузоподъемность применяемого БПЛА;
- подъем технологического оборудования с габаритами и формой, затрудняющими транспортировку стандартными БПЛА;
- разработку нового способа поэтапного подъема технологического оборудования на инженерные высотные объекты с использованием БПЛА;
- удерживание технологического оборудования на выбранной оператором высоте от поверхности земли без привлечения БПЛА и без непосредственного контакта технологического оборудования с посадочной площадкой высотного объекта;
- расширение зон и участков высотных объектов, где возможно применение робототехнического комплекса;
- расширение круга выполняемых технических и эксплуатационных задач для робототехнического комплекса;
- транспортировка технологического оборудования с высоты посадочной площадки на поверхность земли для проведения сервиса технологического оборудования без привлечения для этой операции БПЛА;
- перенос технологического оборудования через инженерные препятствия высотного объекта без использования для подъема в воздух технологического оборудование посредством тяги БПЛА;
- автоматизация выполнения многих видов работ на инженерных высотных объектах, повышение безопасности и исключение человеческого фактора, уменьшение эксплуатационных расходов, сокращение парка наземного подъемного оборудования.
Вышеизложенное позволяет сделать вывод о том, что заявленная совокупность признаков характеризует новое конструктивное решение, ранее не известное из уровня техники, а следовательно, заявленное изобретение соответствует критерию «новизна».
Поскольку предлагаемая конструкция робототехнического комплекса и достигаемый технический результат явным образом не следуют из уровня техники, постольку можно сделать вывод о соответствии заявляемого решения критерию «изобретательский уровень».
Предлагаемая конструкция робототехнического комплекса может быть изготовлена с использованием известных в технике конструктивных деталей с использованием известных технологий. Возможность промышленного использования заявляемого робототехнического комплекса позволяет сделать вывод о его соответствии критерию «промышленная применимость».
Примеры конкретного выполнения робототехнического комплекса описывается ниже со ссылками на прилагаемые чертежи.
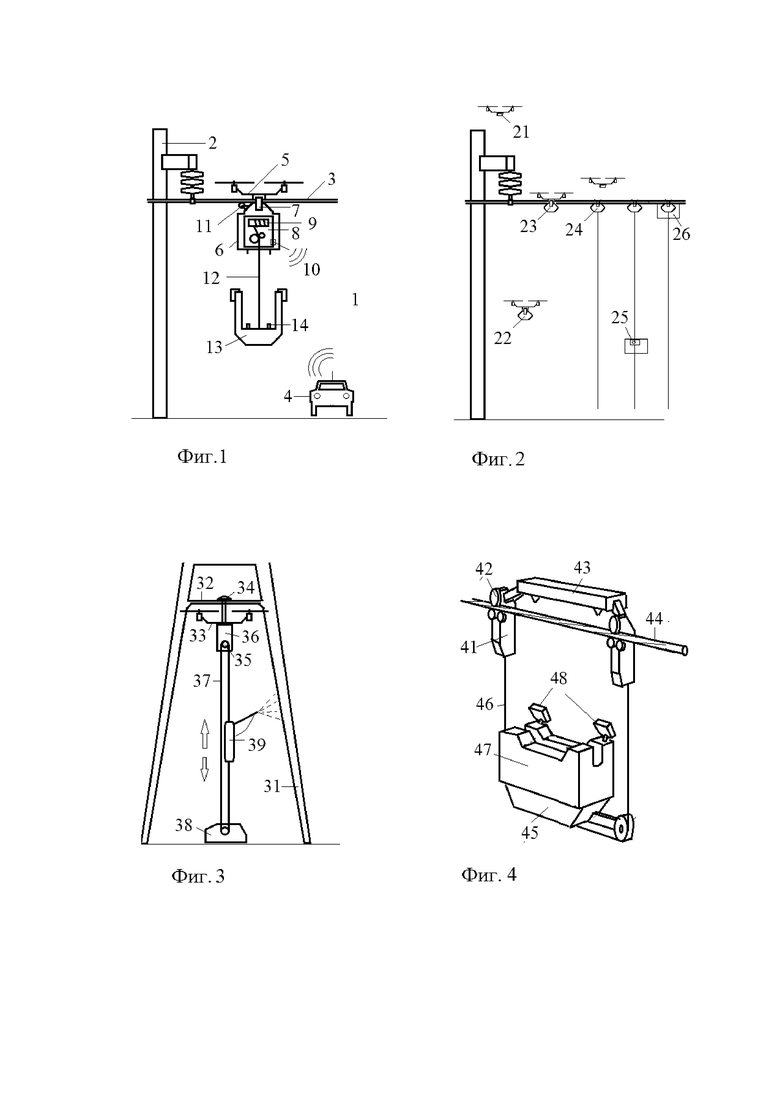
Фиг. 1 – основная станция на автомобильном шасси, подъемно-спусковое устройство установлено на грузовой платформе, управление подъёмно-спусковым устройством обеспечивается электронным блоком управления, технологическое оборудование - монтажная тележка.
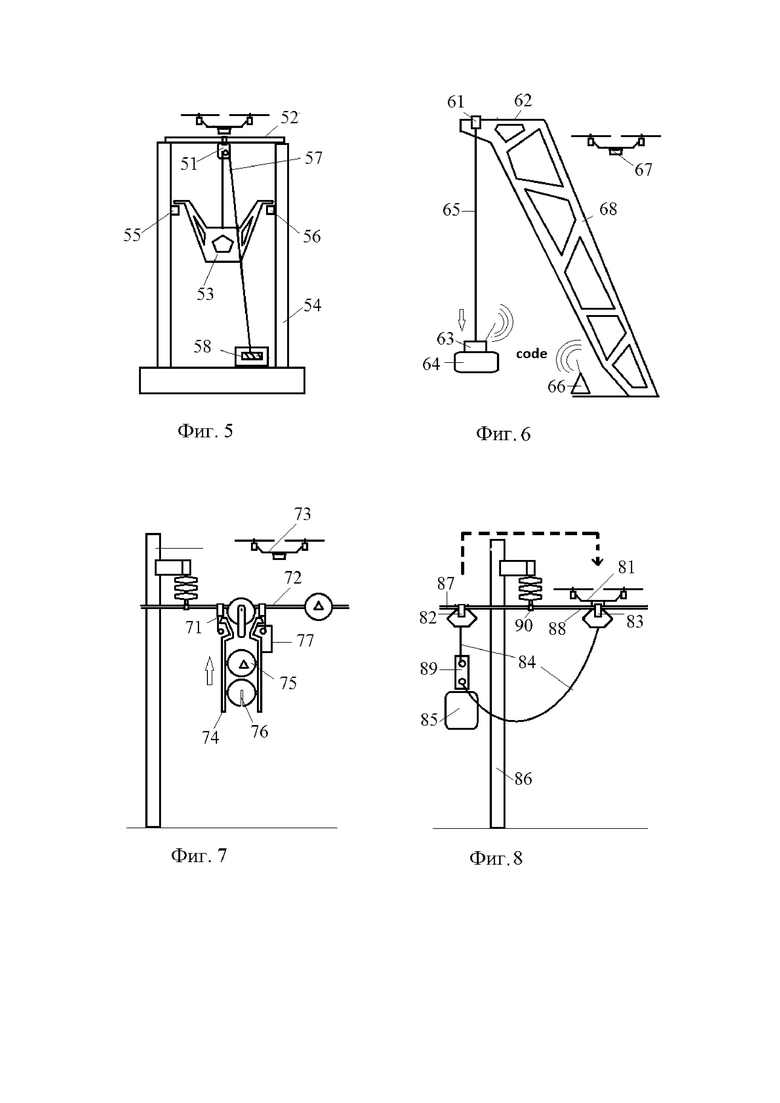
Фиг. 2 – схема поэтапной эксплуатации робототехнического комплекса, подъемно спусковое устройство выполнено с возможностью передвижения по гибкой подвеске.
Фиг. 3 - элементы соединения грузовой платформы и посадочной площадки установлены над винтами БПЛА, подвеска в виде бесконечной ленты, подъемно спусковое устройство установлено на грунте, технологическое оборудование перемещается между грузовой платформой и грунтом без привлечения БПЛА.
Фиг. 4 - на грузовой платформе установлено мобильное устройство для передвижения по посадочной площадке, стыковочно-разъединяемый узел выполнен в виде автоматизированного устройство для соединения технологического оборудования с посадочной площадкой высотного объекта.
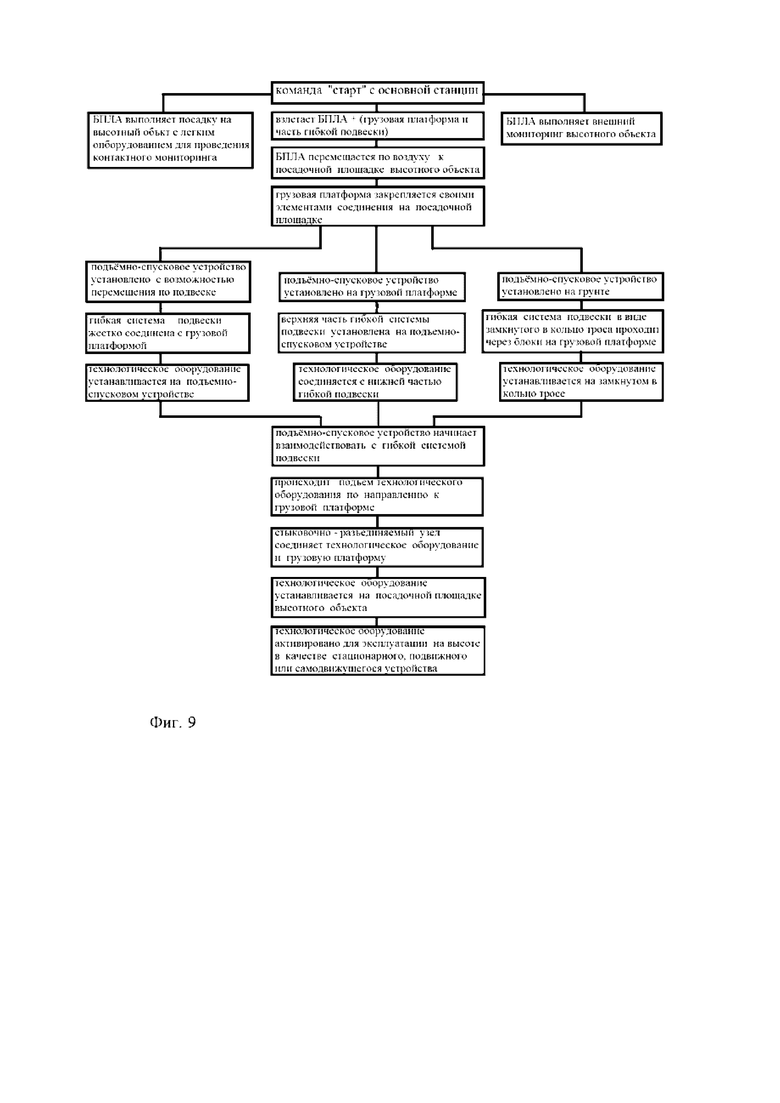
Фиг. 5 - проиллюстрирован способ установки технологического оборудования на точках опоры высотного объекта отдаленных от посадочной площадки.
Фиг. 6 - проиллюстрирован способ долговременной установки на высотном объекте технологического оборудования и его сервис без привлечения БПЛА.
Фиг. 7 - проиллюстрирован способ установки технологического оборудования в виде группы взаимодействующих между собой устройств разной конструкции и разного назначения.
Фиг. 8 - проиллюстрирован способ переноса технологического оборудования через инженерные препятствия на высотном объекте.
Фиг. 9 – блок-схема способа эксплуатации робототехнического комплекса на высотных объектах.
На фиг. 1 изображен робототехнический комплекс 1 для эксплуатации на высотных объектах 2, состоящий из мобильной основной станции 4, беспилотного летательного аппарата (БПЛА) 5, технологического оборудования (система мониторинга)13 поднимаемого на посадочную площадку (провод ЛЭП) 3 высотного объекта 2, системы дистанционного управления, наблюдения и навигации БПЛА (на чертеже не показаны), на БПЛА 5 установлена по меньшей мере одна, грузовая платформа 6, на грузовой платформе выполнены элементы соединения 7 с посадочной площадкой 3, и установлено подъёмно-спусковое устройство 8 с электрической лебедкой 9, выполнен блок управления 10, на электрической лебедке 9 установлена гибкая система подвески (трос) 12, технологическое оборудование 13 кинетически связано с грузовой платформой 6 посредством гибкой подвески 12, технологическое оборудование 13 установлено с возможностью заданного перемещения относительно грузовой платформы 6, на технологическом оборудовании 13 установлен стыковочно-разъединяемый узел 14 для соединения с грузовой платформой 6, на грузовой платформе выполнено мобильное устройство 11 для перемещения по посадочной площадке 3.
Устройство 1 работает следующим образом; оператор по радиоканалу с основной станции 4 запускает БПЛА 5, вместе с установленной грузовой платформой 6 и подъёмно-спусковым устройством 8, к электролебедке 9 присоединена часть гибкой подвески 12. БПЛА 5 перемещается по воздуху на необходимую высоту к посадочной площадке 3 высотного объекта 2. Другая часть гибкой подвески 12 соединена с технологическим оборудованием 13. Грузовая платформа 6 закрепляется своими элементами соединения 7 на посадочной площадке 3, после команды на блок управления 10 подъёмно-спусковое устройство 8 начинает взаимодействовать с гибкой системой подвески 12 и происходит подъем технологического оборудования 13 по направлению к грузовой платформе 6, где стыковочно-разъединяемый узел 14 соединяет технологическое оборудование 13 и грузовую платформу 6, технологическое оборудование 13 устанавливается на посадочной площадке 3 высотного объекта или выборочно на определенной дистанции под посадочной площадкой 3. Мобильное устройство 11 по команде перемещает комплекс по посадочной площадке 3. технологическое оборудование 13 начинает свою работу.
На Фиг. 2 показана схема поэтапной эксплуатации робототехнического комплекса (вариант), 21 – БПЛА выполняет с воздуха мониторинг ЛЭП, 22 - подъем грузовой платформы в воздух, 23 – установка платформы на силовой провод, 24 - на землю сбрасывается гибкая подвеска, БПЛА отсоединяется, 25– персонал присоединяет к подвеске технологическое оборудование и электроподъемник (не показано), по подвеске поднимается электроподъемник с прикрепленным технологическим оборудованием, 26 - технологическое оборудование установлено на проводе.
На Фиг. 3 грузовая платформа 36 зафиксирована элементами соединения 34 на посадочной площадке 32. Оператор может выборочно задавать высоту нахождения технологического оборудования 39 посредством управления подъемно-спусковым устройством 38 установленном на грунте. Это происходит без повторного привлечения БПЛА 33 и без непосредственного контакта технологического оборудования 39 с посадочной площадкой 32 высотного объекта 31. Такая схема управления позволит оперативно менять положение технологического оборудования 39 относительно высотного объекта 31 (например, при подъеме грузов, страховки персонала, покраски опор ЛЭП и т.п.) за счет передвижения закольцованного каната 37 по роликовому блоку 35.
На Фиг. 4 - на грузовой платформе 41 установлено мобильное устройство 42 для передвижения по посадочной площадке 44, выполнено автоматизированное устройство 43 для соединения фиксаторов 48 технологического оборудования 47 с посадочной площадкой 44 высотного объекта. Подъемно-спусковое устройство 45 поднимает наверх технологическое оборудование 47 и происходит взаимодействие автоматизированного устройства 43 с фиксаторами 48, в результате чего закрепляется на проводе 44 технологическое оборудование 47.
На Фиг. 5 робототехнический комплекс после выполнения установки грузовой платформы 51 на посадочной площадке 52, лебедка 58 наматывая гибкий трос 57 поднимает технологическое оборудование 53. Производится установка технологического оборудования 53 на точки опоры 55 и 56, отдаленными на определенном расстоянии от посадочной площадки 52 высотного объекта 54. Такой способ установки позволит проводить работы по подъему и закреплению нестандартного оборудования 3.
На Фиг. 6. грузовая платформа 61 установлена на посадочной площадке 62 высотного объекта 68, обеспечиваются долговременное или постоянное закрепление грузовой платформы 61 и подъемно-спускового устройства 63 на посадочной площадке 62, (предпочтительно при этом производится расстыковка с БПЛА 67). Такая схема установки позволяет технологическому оборудованию 64 продолжительное время выполнять на высотном объекте 68 свои функции и при этом по команде оператора 66 (с использованием шифрованного радиокода) остается возможным опустить на гибкой сцепке 65 технологическое оборудование 64 на грунт без привлечения БПЛА 67 (например, для ремонта, замены источника питания, и т.п.).
На Фиг. 7. грузовая платформа 71 установлена на посадочной площадке (провод) 72, БПЛА 73 отсоединен, производится подъем технологического оборудования в виде группы взаимодействующих между собой устройств разной конструкции и разного назначения - монтажного автоматизированного устройства 74 и маркеров 75 для долговременного жесткого соединения с проводом. В стационарных маркерах, выполнены фиксирующие зажимы 76. Монтажное автоматизированное устройство 74 позиционирует на проводе стационарный маркер 75 и по команде приводит в действие свой инструмент77, обеспечивающий передачу механических усилий на зажимы 76, и путем закручивания крепежных элементов зажимы 76 плотно стягивают разъемные части стационарного маркера 75, тем самым закрепляя маркер на проводе 72. При выполнении мобильного устройства для передвижения по проводу на грузовой платформе или на технологическом оборудовании комплекс передвигается на определенную дистанцию и повторяет процедуру уже с другим маркером.
На Фиг. 8 при установке на БПЛА 81 двух и более комплектов грузовых платформ (82,83) и гибких подвесок 84 достигается более сложное перемещение технологического оборудования 85 относительно высотного объекта 86. Первоначально роботизированный комплекс посредством БПЛА 81 устанавливается на посадочной площадке 87 с использованием грузовой платформы 82, а затем БПЛА 81 расстыковывается с платформой 82 и переносит грузовую платформу 83 на посадочную площадку 88. Подъемно-спусковое устройство 89 взаимодействует с гибкими подвесками 84 соединенными с грузовыми платформами 82 и 83, вследствие чего технологическое оборудование 85 перемещается по гибким подвескам с посадочной площадки 87 на посадочной площадку 88. Такая схема перемещения позволит технологическому оборудованию 85 преодолевать препятствия 90 инженерных высотных объектов (например, перенос оборудования через изоляторы опор, переход с одного провода на другой и т.п.) или позиционироваться в необходимой точке у высотного объекта.
На Фиг. 9 – блок-схема способа эксплуатации робототехнического комплекса: показывает этапы выполнения подъема технологического оборудования на высотный объект и варианты установки и взаимодействия между собой основных устройств робототехнического комплекса.
Хотя изобретение описано со ссылкой на конкретные варианты реализации, это описание не следует рассматривать в ограничительном смысле. Различные модификации описанного варианта реализации, а также альтернативные варианты реализации изобретения будут очевидны для специалистов в данной области техники после обращения к описанию изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный боевой комплекс | 2023 |
|
RU2819942C1 |
| Многоцелевой БПЛА-перехватчик | 2020 |
|
RU2723203C1 |
| ДИРИЖАБЛЬ И СПОСОБ ЕГО ПРИЧАЛИВАНИЯ | 2017 |
|
RU2654879C1 |
| Мобильная аэроплатформа | 2021 |
|
RU2779484C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Многофункциональное судно обеспечения морских буровых платформ и комплекс судовой системы грузообработки для применения на многофункциональном судне | 2020 |
|
RU2747109C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Многоразовый модульный трансатмосферный аппарат | 2022 |
|
RU2787063C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
Изобретение относится к области электротехники. Технический результат - повышение эффективности технологического оборудования и беспилотников за счет появления новых эксплуатационных и технических возможностей. Способ эксплуатации робототехнического комплекса на высотных объектах заключается в том, что при подаче команды с основной станции активируется БПЛА, на котором установлена грузовая платформа и часть гибкой подвески. БПЛА перемещается по воздуху на необходимую высоту к посадочной площадке высотного объекта. Гибкая подвеска выполнена с возможностью взаимодействия с подъёмно-спусковым устройством для перемещения на высоту технологического оборудования. Грузовая платформа закрепляется своими элементами соединения на посадочной площадке высотного объекта, после этого подъёмно-спусковое устройство начинает взаимодействовать с гибкой системой подвески и происходит подъем технологического оборудования по направлению к грузовой платформе, где стыковочно-разъединяемый узел соединяет технологическое оборудование и грузовую платформу, технологическое оборудование устанавливается на посадочной площадке высотного объекта или выборочно на определенной дистанции от площадки высотного объекта. После этого технологическое оборудование может быть активировано для эксплуатации на высоте в качестве стационарного, подвижного или самодвижущегося устройства. 2 н. и 7 з.п. ф-лы, 9 ил.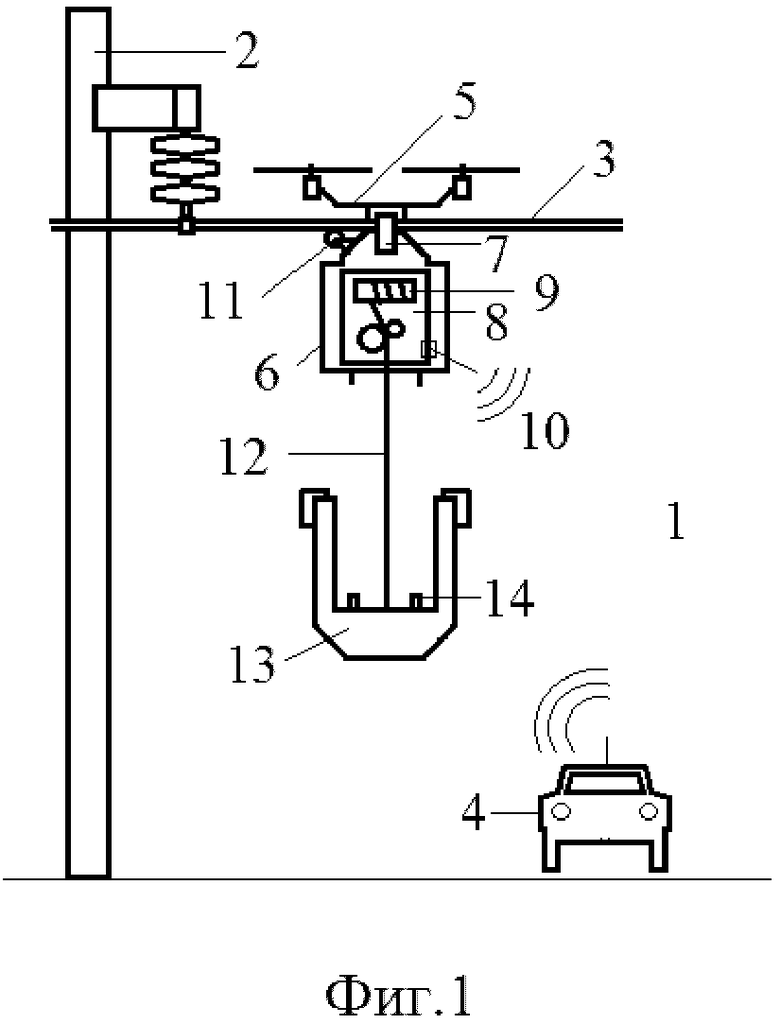
1. Робототехнический комплекс для эксплуатации на высотных объектах, входящих в систему электроэнергетики и радиосвязи, состоящий из основной станции, беспилотного летательного аппарата (БПЛА), технологического оборудования поднимаемого на посадочную площадку высотного объекта, системы дистанционного управления, наблюдения и навигации, отличающийся тем, что на БПЛА установлены по меньшей мере одна грузовая платформа, которая снабжена элементами соединения с посадочной площадкой высотного объекта, гибкая система подвески, которая обеспечивает кинетическую связь грузовой платформы с технологическим оборудованием с возможностью его заданного перемещения относительно грузовой платформы, по меньшей мере одно подъёмно-спусковое устройство с электрическим движителем, взаимодействующее с гибкой системой подвески, а управление подъёмно-спусковым устройством обеспечивается электронным блоком управления, при этом по меньшей мере на одном из устройств комплекса установлен стыковочно-разъединяемый узел, обеспечивающий возможность взаимодействия с другими устройствами комплекса или с посадочной площадкой высотного объекта.
2. Робототехнический комплекс для эксплуатации на высотных объектах по п. 1, отличающийся тем, что грузовая платформа выполнена с возможностью передвижения по посадочной площадке высотного объекта.
3. Робототехнический комплекс для эксплуатации на высотных объектах по п. 1, отличающийся тем, что дополнительно установлено автоматизированное устройство для соединения технологического оборудования с посадочной площадкой высотного объекта.
4. Робототехнический комплекс для эксплуатации на высотных объектах по п. 1, отличающийся тем, что подъёмно-спусковое устройство установлено на грузовой платформе.
5. Робототехнический комплекс для эксплуатации на высотных объектах по п. 1, отличающийся тем, что подъёмно-спусковое устройство установлено на грунте.
6. Робототехнический комплекс для эксплуатации на высотных объектах по п. 1, отличающийся тем, что подъёмно-спусковое устройство выполнено с возможностью перемещения относительно грузовой платформы по гибкой системе подвески.
7. Робототехнический комплекс для эксплуатации на высотных объектах по п. 1, отличающийся тем, что технологическое оборудование представлено в виде группы взаимодействующих между собой устройств разной конструкции и разного назначения.
8. Робототехнический комплекс для эксплуатации на высотных объектах по п. 1, отличающийся тем, что гибкая подвеска представлена в виде бесконечной ленты.
9. Способ эксплуатации робототехнического комплекса на высотных объектах путем подачи команды с основной станции на БПЛА, снабженной грузовой платформой и гибкой системой подвески, выполненной с возможностью взаимодействия с подъёмно-спусковым устройством для перемещения на высоту технологического оборудования, перемещения БПЛА по воздуху на необходимую высоту к посадочной площадке высотного объекта, закрепления грузовой платформы посредством элементов соединения к посадочной площадке высотного объекта, подъема технологического оборудования по направлению к грузовой платформе с использованием подъёмно-спускового устройства и гибкой системы подвески, фиксации технологического оборудования и грузовой платформы посредством стыковочно-разъединяемого узла, размещения технологического оборудования на посадочной площадке высотного объекта, запуска технологического оборудования для эксплуатации на высоте в качестве стационарного, подвижного или самодвижущегося устройства.
| US 2006114122 A1, 01.06.2006 | |||
| Устройство для диагностики воздушных линий электропередач | 2017 |
|
RU2645774C1 |
| УСТРОЙСТВО ДИАГНОСТИКИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ И ЕГО КОМПОНЕНТ | 2014 |
|
RU2558002C1 |
| CN 0106741942 B, 07.12.2018. | |||

