Область техники
Изобретение относится к лидарам с управлением лазерным излучением без подвижных частей с возможностью управления интенсивностью, частотой, фазовыми характеристиками и направлением светового излучения и может найти применение в ряде специальных областей: оптической локации, робототехнических комплексах, автомобильной промышленности, самолетостроении, беспилотной авиации, системах предупреждения столкновения с препятствиями, картографии и навигации, космической геодезии, системах машинного зрения, строительстве, горном деле, системах подводного зрения, при исследовании атмосферы, разминировании и при спасении людей на море и на суше.
Уровень техники
Известен лидар, содержащий вращающуюся призму, двигатель для вращения призмы, лазерный источник света, передающий и приемный тракты. Недостатком этого устройства является необходимость стабилизации вращающейся призмы, существенные ограничения по угловым скоростям и ускорениям сканирующей системы, недолговечность работы устройств вращения, а также большие масс-габаритные параметры и энергопотребление [патент US 20110216304 A1].
Известен лидар, содержащий матрицу излучающих лазерных диодов, матрицу фотоприемных элементов, диаграмма направленности которых формирует поле зрения, систему коммутации, усиления, фильтрации и согласования сигнала, быстродействующую схему аналого-цифрового преобразователя, схему цифровой обработки сигнала, выполненную на программируемой логической интегральной схеме. Недостатком этого лидара является малое угловое разрешение, ограниченное количеством пар «приемник - передатчик», малое быстродействие вследствие использования фазового метода измерения дальности и использования аналого-цифрового преобразователя [патент US 20150219764 A1].
Наиболее близким изобретением является лидар, содержащий лазерный излучатель, модулятор, выходную оптическую систему, приемный оптико-электронный тракт, цифровой вычислитель, потребитель информации, драйвер лазерного излучателя, блок управления, блок синхронизации [патент RU 2690537]. Недостатком такого лидара являются большие габариты, что может приводить к ограничению в использовании в автомобильной, авиационной и робототехнической промышленностях.
Задачей настоящего изобретения является создание компактного лидара, который можно использовать в автомобильной, авиационной и робототехнической промышленностях.
Сущность изобретения
Эти задачи решаются созданием настоящего изобретения.
Компактный лидар согласно нашему изобретению содержит лазерный излучатель, электрооптический преобразователь, выходную оптическую систему, направленную на объект наблюдения, приемный оптико-электронный тракт, направленный на объект наблюдения, электрически связанный с цифровым вычислителем, потребитель информации, электрически связанный с цифровым вычислителем, драйвер, блок управления, блок синхронизации, причем лазерный излучатель, электрооптический преобразователь расположены на первой оптической оси, при этом электрооптический преобразователь содержит кубический светоделитель и модулятор, причем кубический светоделитель первой гранью перпендикулярен к первой оптической оси, а второй гранью, параллельной первой грани, обращен к модулятору, причем лазерный излучатель, кубический светоделитель и модулятор расположены на первой оптической оси, причем светоделительная линия кубического светоделителя расположена под 45 градусов к первой оптической оси, при этом выходная оптическая система и кубический светоделитель находятся на второй оптической оси, перпендикулярной к первой оптической оси, причем вторая оптическая ось проходит через центр третьей грани кубического светоделителя, обращенной к выходной оптической системе, причем драйвер электрически связан с лазерным излучателем, блок управления электрически связан с электрооптическим преобразователем, цифровым вычислителем и блоком синхронизации, причем лазерный излучатель содержит импульсный лазерный источник и коллиматор, расположенные на первой оптической оси, перпендикулярной первой грани кубического светоделителя, причем модулятор содержит прозрачную диэлектрическую подложку, одна из сторон которой перпендикулярна первой оптической оси, а другая ее сторона последовательно оптически контактирует с прозрачным электропроводящим слоем, с гелеобразным слоем, с зазором и с трехслойной структурой, причем поверхность системы электродов, обращенная к зазору, покрыта диэлектрическим зеркалом, причем система электродов электрически контактирует с блоком управления, при этом система электродов содержит проводящую матричную сетку с n × m штуками диэлектрических ячеек pij, причем в ячейках проводящей матричной сетки размещена матрица электродов из n × m штук электродов, причем каждый электрод матрицы электродов разделен диэлектриком от проводящей матричной сетки, причем проводящая матричная сетка электрически соединена с блоком управления, содержащим источник опорного напряжения и матрицу источников сигнала из n × m источников сигнала Uij, при этом первый полюс источника опорного напряжения подключен к прозрачному проводящему слою, а второй полюс источника опорного напряжения соединен с проводящей матричной сеткой, при этом каждый электрод из матрицы электродов электрически соединен с каждым соответствующим источником матрицы источников сигала из n × m источников сигнала Uij, при этом другой полюс каждого из источников матрицы источников сигнала из n × m источников сигнала Uij заземлен, причем блок синхронизации электрически соединен с драйвером лазерного излучателя и с блоком управления, при этом выходная оптическая система содержит, например, адаптивную оптику, оптически направленную на объект наблюдения, при этом приемный оптико-электронный тракт оптически направлен на объект наблюдения и содержит объектив, полосовой оптический фильтр, фотоприемный элемент, согласующий электронный тракт, регистрирующую электронную схему, причем объектив, полосовой оптический фильтр и фотоприемный элемент расположены на одной оптической оси, а фотоприемный элемент электрически соединен с согласующим электронным трактом, при этом согласующий электронный тракт, электрически соединен с регистрирующей электронной схемой, при этом регистрирующая электронная схема электрически соединена с цифровым вычислителем, при этом цифровой вычислитель электрически соединен с драйвером и блоком синхронизации.
Кроме того в компактном лидаре по настоящему изобретению (Фиг. 7) модулятор содержит последовательно расположенные вогнутую прозрачную диэлектрическую подложку, вогнутый прозрачный электропроводящий слой, вогнутый гелеобразный слой, вогнутый зазор, вогнутую трехслойную структуру, причем вогнутая прозрачная диэлектрическая подложка, вогнутой стороной направлена на лазерный излучатель, причем форма вогнутого прозрачного электропроводящего слоя, вогнутого гелеобразного слоя, вогнутого зазора, вогнутой трехслойной структуры одинакова для всех и представляет собой, например, сферическую, параболическую или иную фокусирующую форму, причем фокус упомянутой формы расположен на первой оптической оси.
Перечень фигур
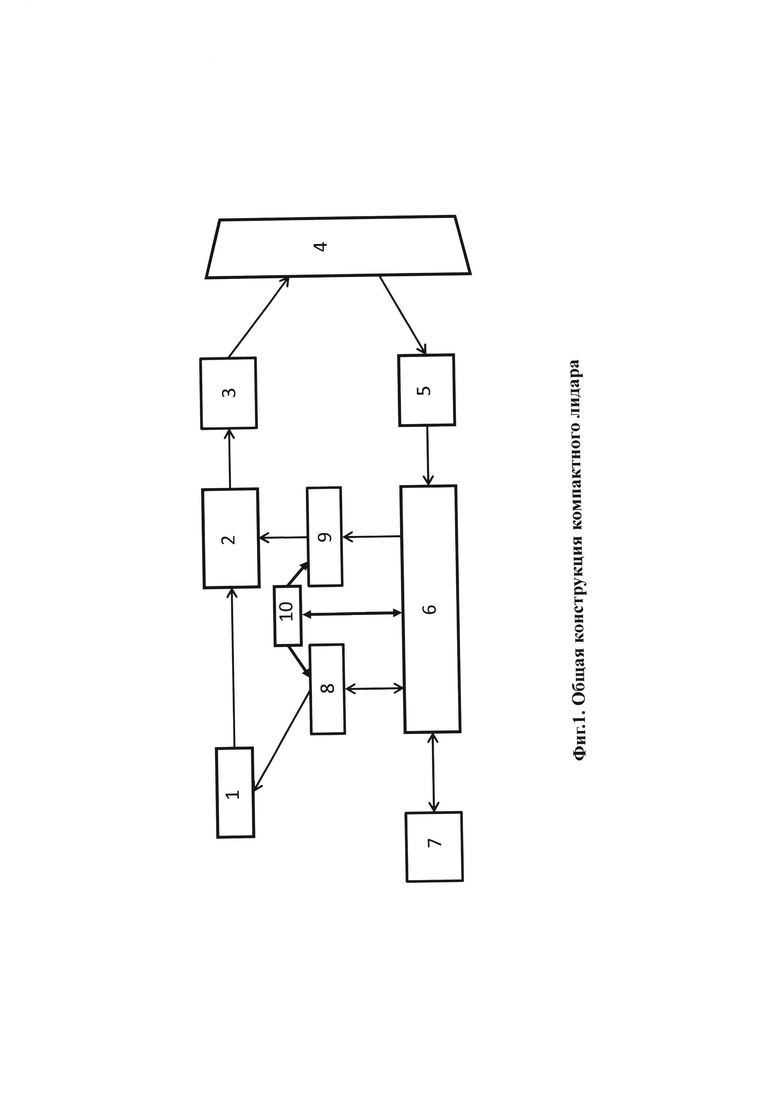
На Фиг. 1 показана общая конструкция компактного лидара.
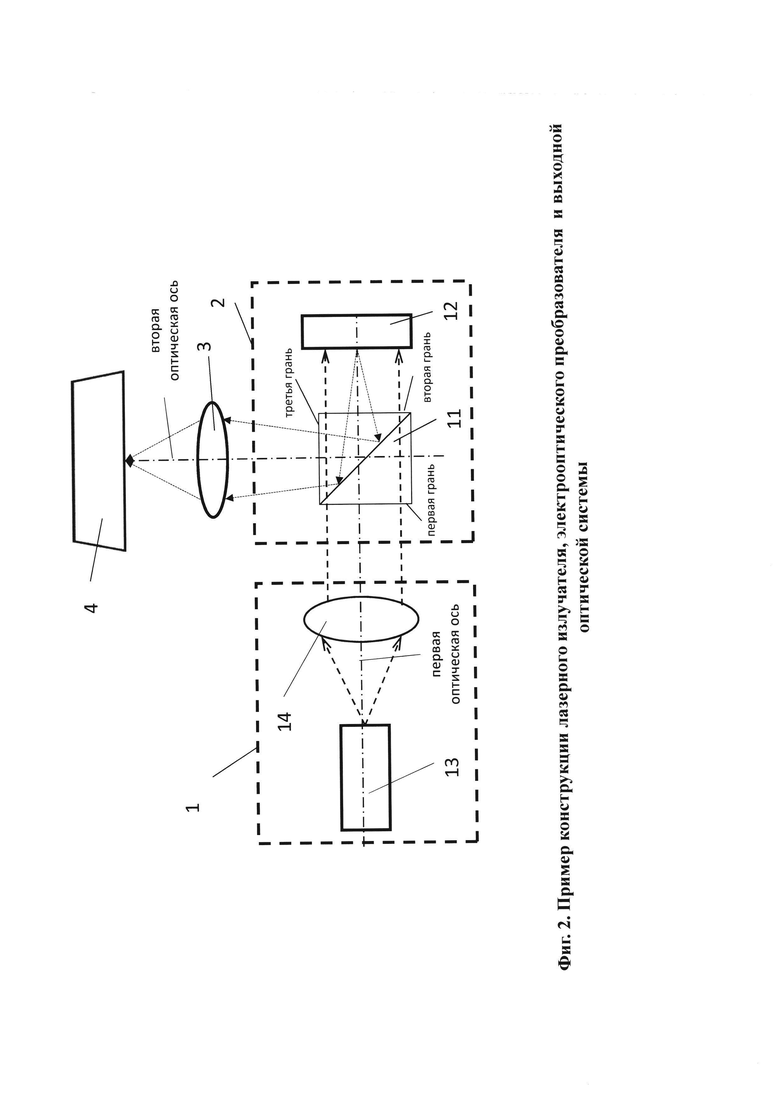
На Фиг. 2 показан пример конструкции лазерного излучателя, электрооптического преобразователя и выходной оптической системы.
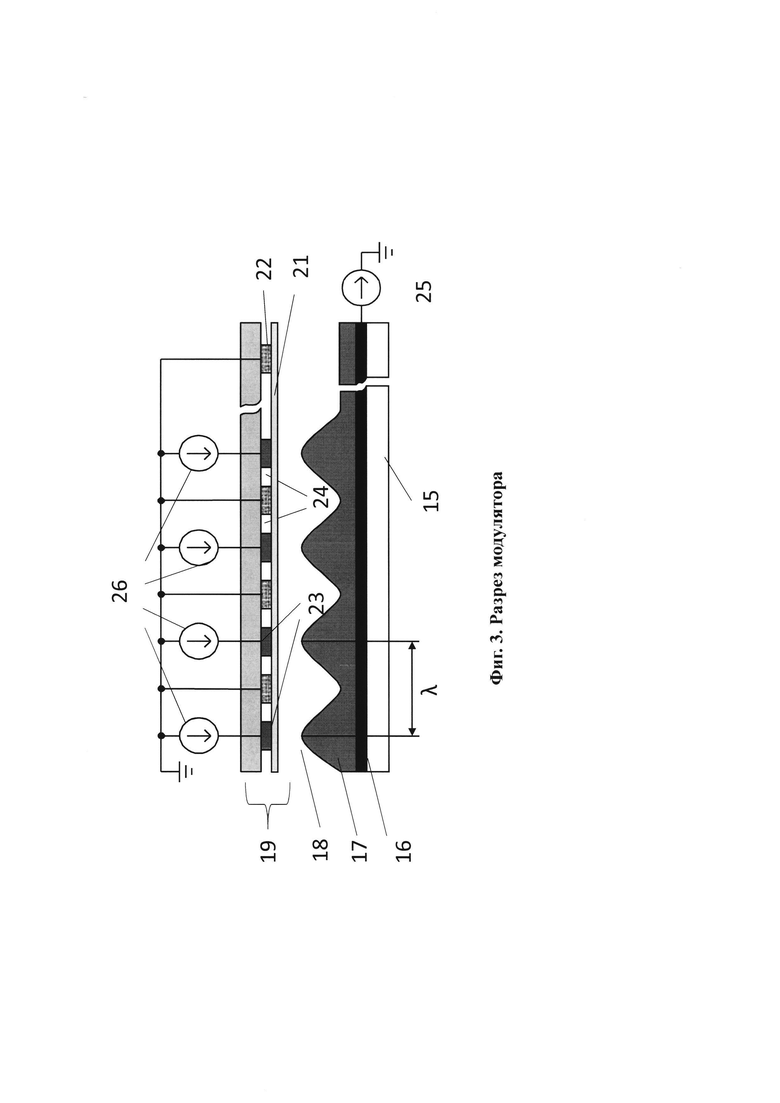
На Фиг. 3 показан разрез модулятора.
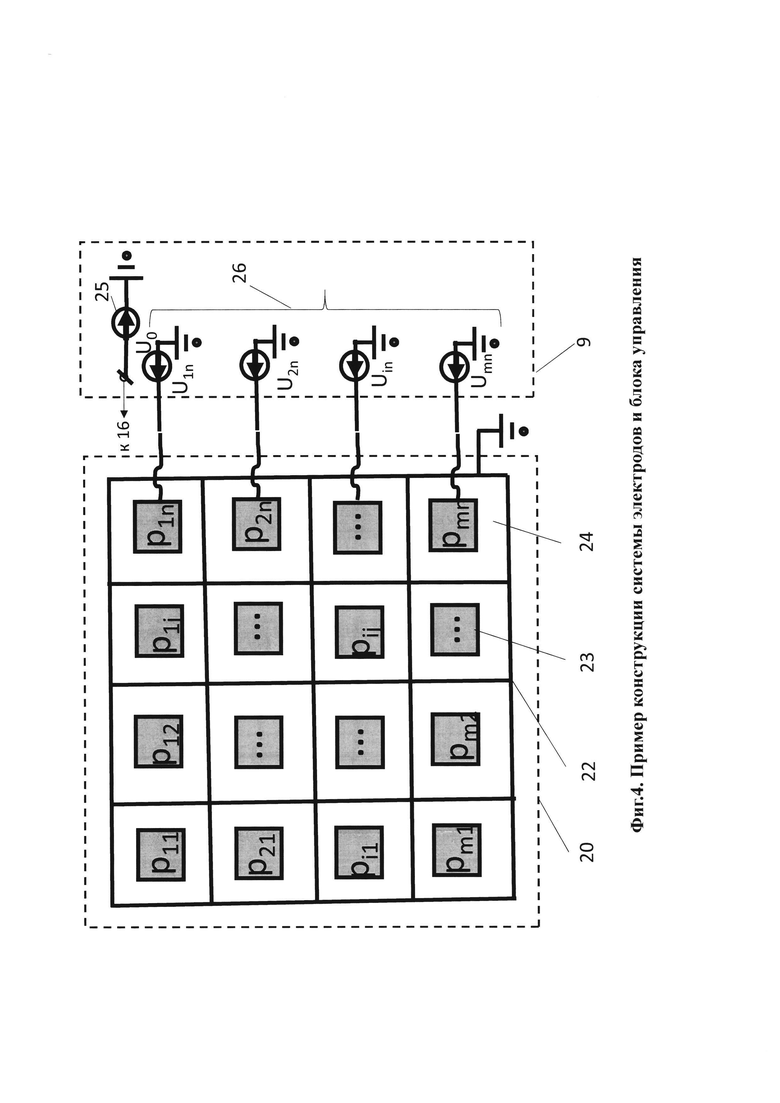
На Фиг. 4 показан пример конструкции системы электродов и блока управления.
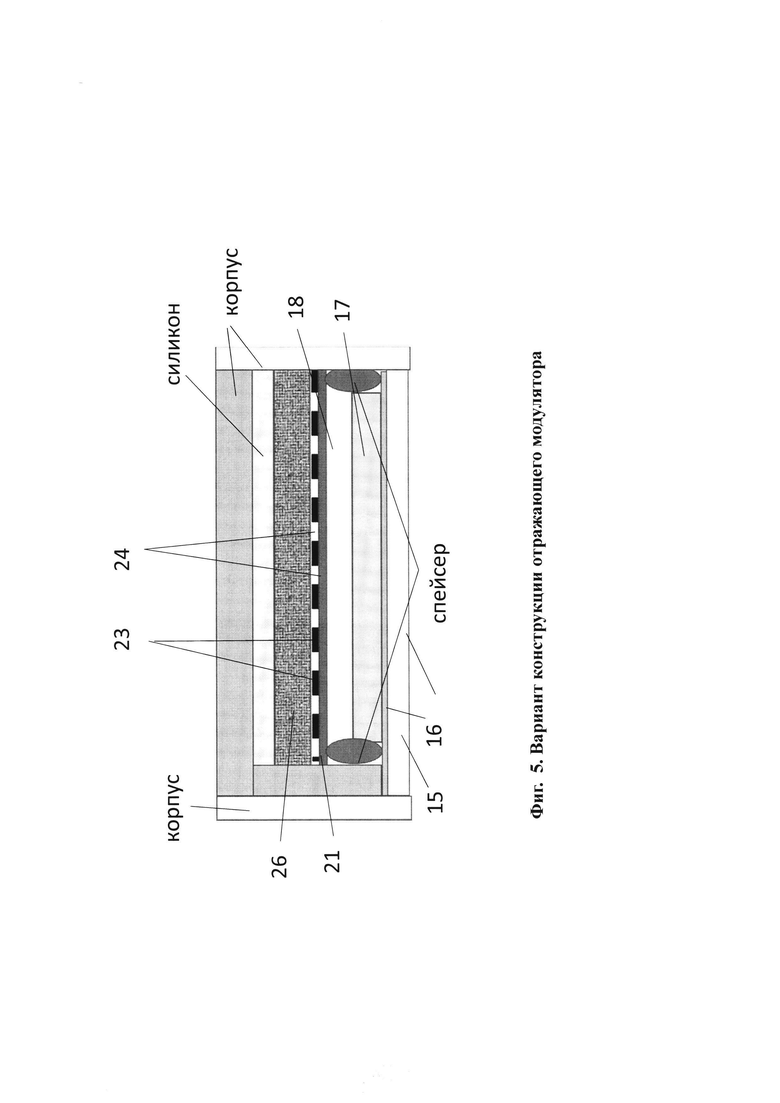
На Фиг. 5 показан вариант конструкции отражающего модулятора.
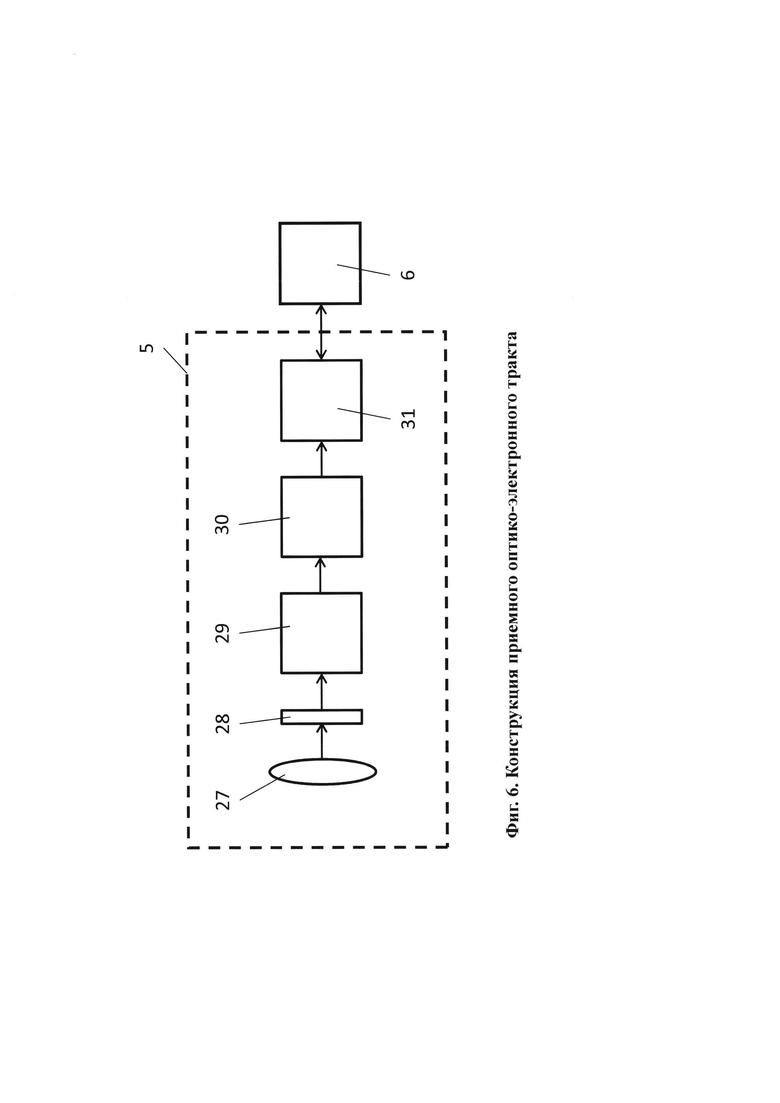
На Фиг. 6 показана конструкция приемного оптико-электронного тракта.
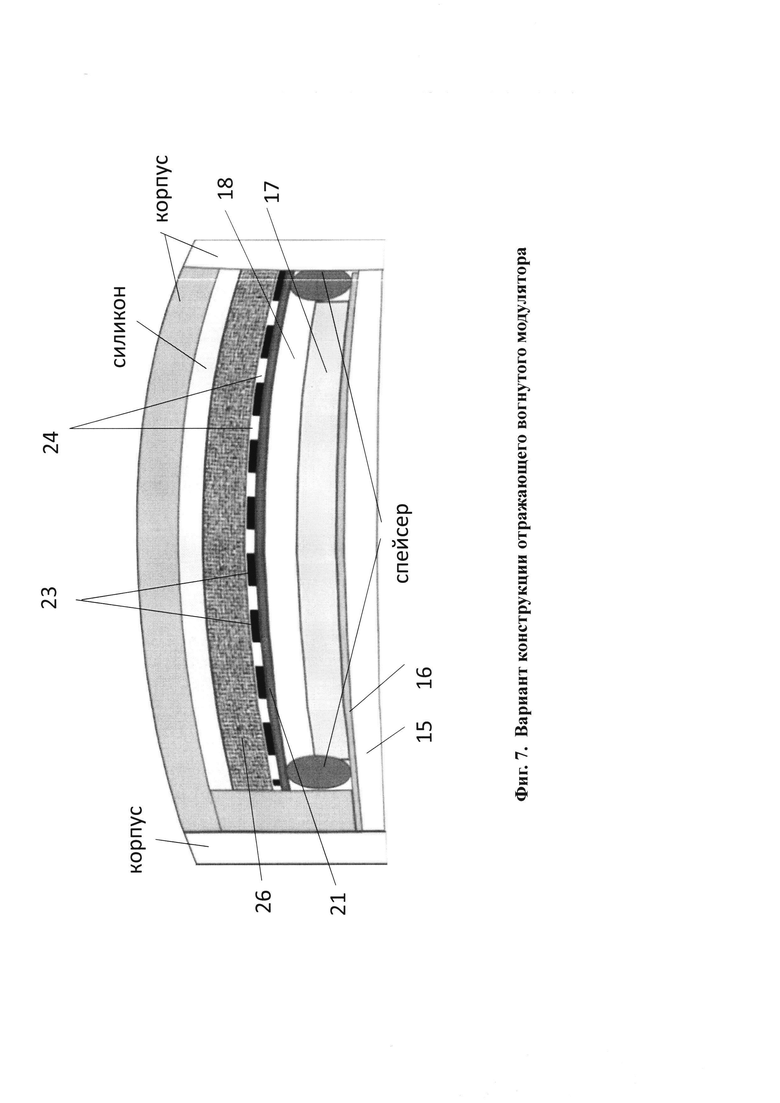
На Фиг. 7 показан вариант конструкции отражающего вогнутого модулятора.
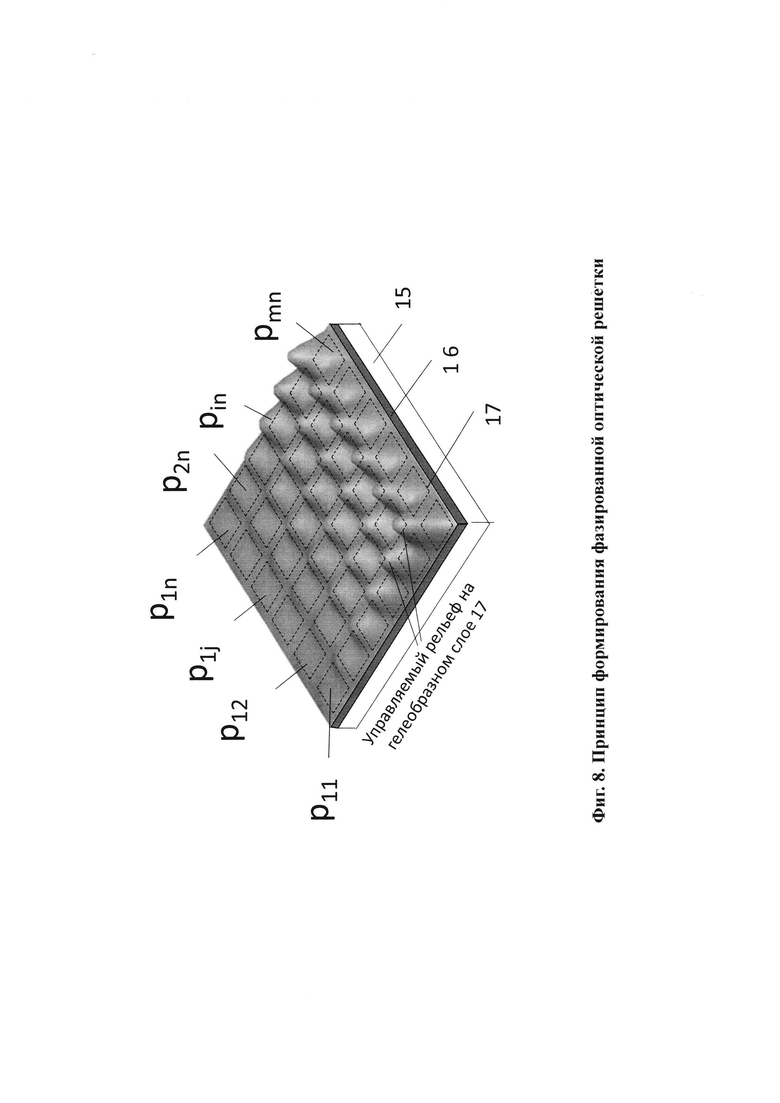
На Фиг. 8 показан принцип формирования фазированной оптической решетки.
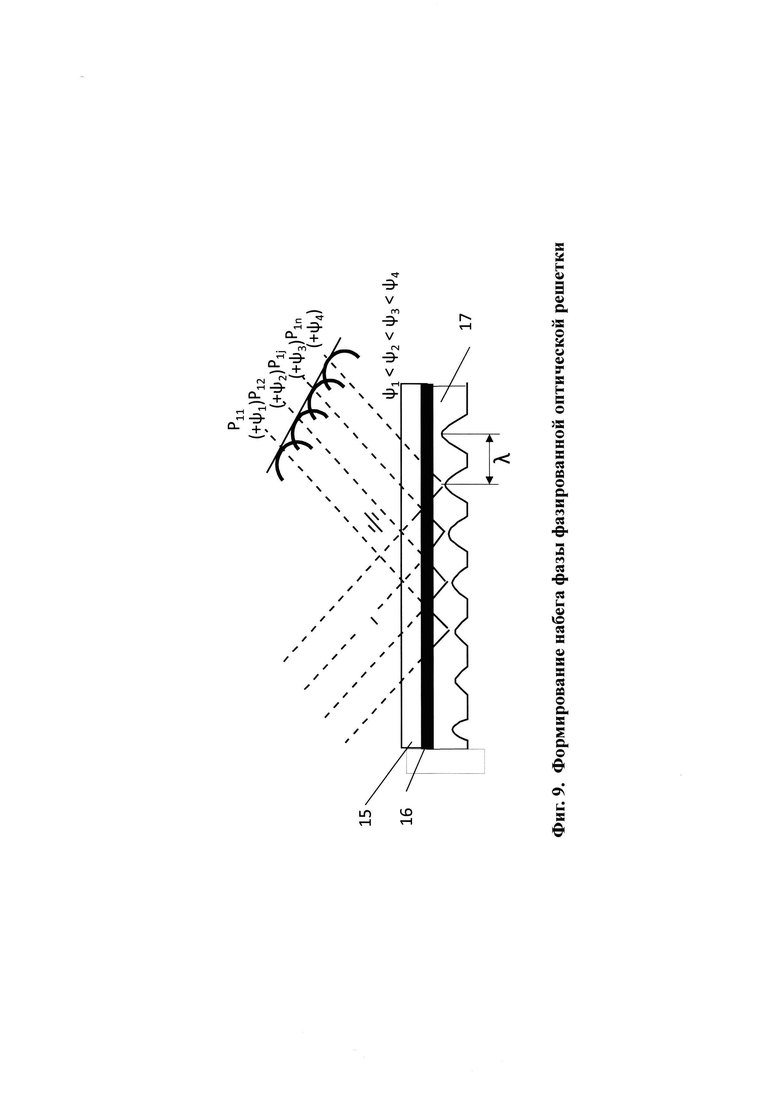
На Фиг. 9 показано формирование набега фазы фазированной оптической решетки.
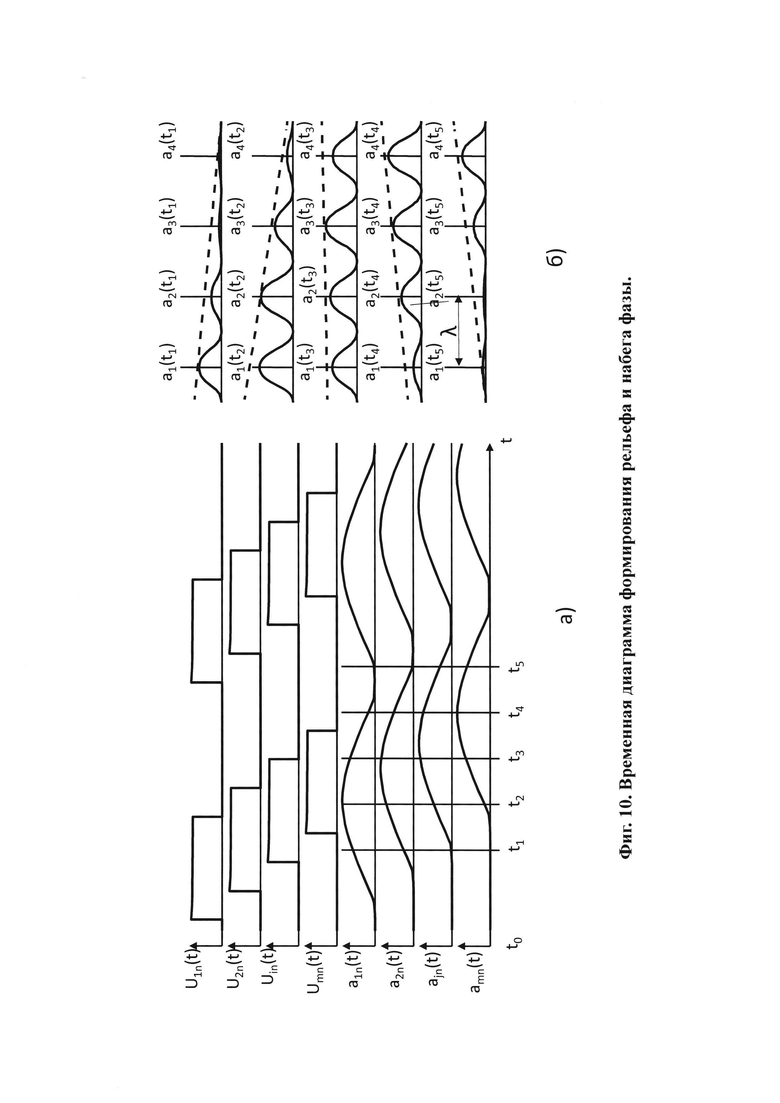
На Фиг. 10 показана временная диаграмма формирования рельефа и набега фазы.
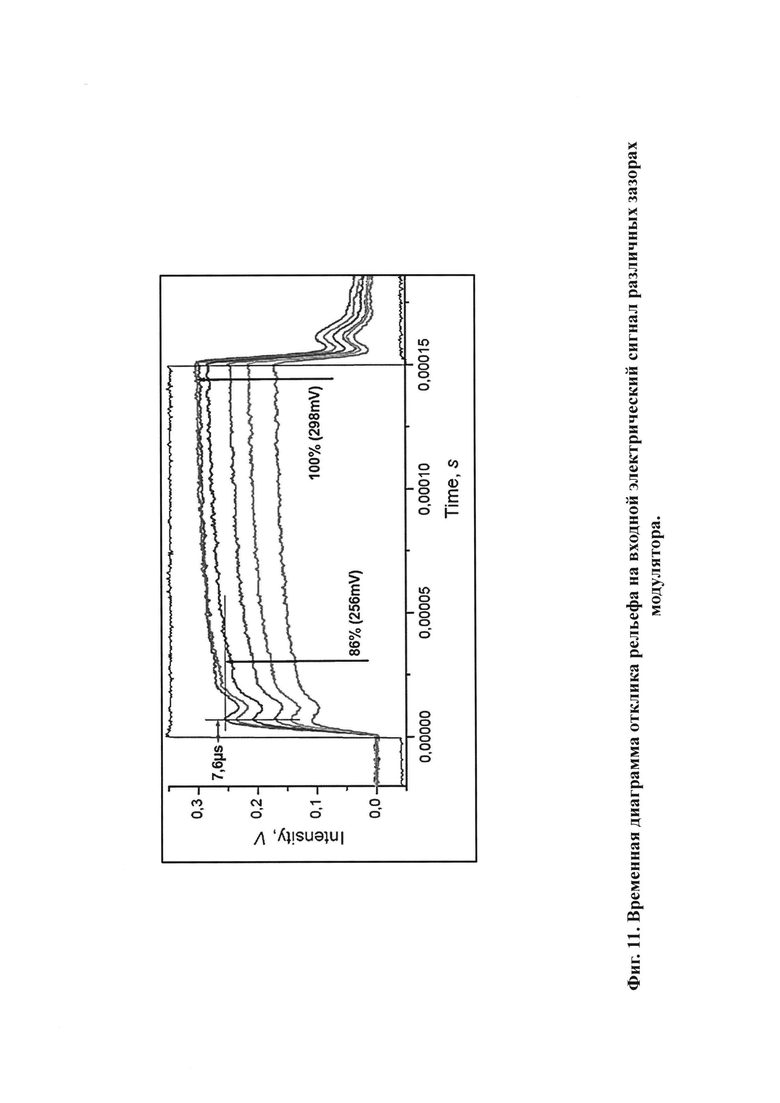
На Фиг. 11 показан пример временной диаграммы отклика рельефа на входной электрический сигнал при различных зазорах модулятора.
На Фиг. 12 показан пример экспериментальных спектральных характеристик пропускания гелеобразного слоя толщиной 20 мкм.
Сведения, подтверждающие возможность осуществления изобретения
Лидар (Фиг. 1, 2, 3, 4, 5, 6,) содержит лазерный излучатель 1, электрооптический преобразователь 2, выходную оптическую систему 3, направленную на объект наблюдения 4, приемный оптико-электронный тракт 5, направленный на объект наблюдения 4, электрически связанный с цифровым вычислителем 6, потребитель информации 7, электрически связанный с цифровым вычислителем 6, драйвер 8, блок управления 9, блок синхронизации 10, причем лазерный излучатель 1, электрооптический преобразователь 2 расположены на первой оптической оси, при этом электрооптический преобразователь 2 содержит кубический светоделитель 11 и модулятор 12, причем кубический светоделитель 11 первой гранью перпендикулярен к первой оптической оси, а второй гранью, параллельной первой грани, обращен к модулятору 12, причем лазерный излучатель 1, кубический светоделитель 11 и модулятор 12 расположены на первой оптической оси, причем светоделительная линия кубического светоделителя 11 расположена под 45 градусов к первой оптической оси, при этом выходная оптическая система 3 и кубический светоделитель 11 находятся на второй оптической оси, перпендикулярной к первой оптической оси, причем вторая оптическая ось проходит через центр третьей грани кубического светоделителя 11, обращенной к выходной оптической системе 3, причем драйвер 8 электрически связан с лазерным излучателем 1, блок управления 9 электрически связан с электрооптическим преобразователем 2, цифровым вычислителем 6 и блоком синхронизации 10, причем лазерный излучатель 1 содержит импульсный лазерный источник 13 и коллиматор 14, расположенные на первой оптической оси, перпендикулярной первой грани кубического светоделителя 11, причем модулятор 12 содержит прозрачную диэлектрическую подложку 15, одна из сторон которой перпендикулярна первой оптической оси, а другая ее сторона последовательно оптически контактирует с прозрачным электропроводящим слоем 16, с гелеобразным слоем 17, с зазором 18 и с трехслойной структурой 19, причем поверхность системы электродов 20, обращенная к зазору 18, покрыта диэлектрическим зеркалом 21, причем система электродов 20 электрически контактирует с блоком управления 9, при этом система электродов 20 содержит проводящую матричную сетку 22 с n × m штуками диэлектрических ячеек pij, причем в ячейках проводящей матричной сетки 22 размещена матрица 23 электродов n × m штук электродов, причем каждый электрод матрицы 23 разделен диэлектриком 24 от проводящей матричной сетки 22, причем проводящая матричная сетка 22 электрически соединена с блоком управления 9, содержащим источник опорного напряжения 25, и матрицу источников сигнала 26 из n × m источников сигнала Uij, при этом первый полюс источника опорного напряжения 25 подключен к прозрачному проводящему слою 16, а второй полюс источника опорного напряжения 25 соединен с проводящей матричной сеткой 22, при этом каждый электрод из матрицы 23 электрически соединен с каждым соответствующим источником матрицы 26 из n × m источников сигнала Uij, при этом другой полюс каждого из источников матрицы источников сигнала 26 из n × m источников сигнала Uij заземлен, причем блок синхронизации 10 электрически соединен с драйвером 8 лазерного излучателя 1 и с блоком управления 9, при этом выходная оптическая система 3 содержит, например, адаптивную оптику, оптически направленную на объект наблюдения 4, при этом приемный оптико-электронный тракт 5 оптически направлен на объект наблюдения 4 и содержит объектив 27, полосовой оптический фильтр 28, фотоприемный элемент 29, согласующий электронный тракт 30, регистрирующую электронную схему 31 причем объектив 27, полосовой оптический фильтр 28 и фотоприемный элемент - 29 расположены на одной оптической оси, а фотоприемный элемент 29 электрически соединен с согласующим электронным трактом 30, при этом согласующий электронный тракт 30, электрически соединен с регистрирующей электронной схемой 31, при этом регистрирующая электронная схема 31 электрически соединена с цифровым вычислителем 6, при этом цифровой вычислитель 6 электрически соединен с драйвером 8 и блоком синхронизации 10.
В другом варианте осуществления устройства (Фиг. 7) модулятор 12 содержит последовательно расположенные вогнутую прозрачную диэлектрическую подложку 15, вогнутый прозрачный электропроводящий слой 16, вогнутый гелеобразный слой 17, вогнутый зазор 18, вогнутую трехслойную структуру 19, причем вогнутая прозрачная диэлектрическая подложка 15, вогнутой стороной направлена на лазерный излучатель 1, причем форма вогнутого прозрачного электропроводящего слоя 16, вогнутого гелеобразного слоя 17, вогнутого зазора 18, вогнутой трехслойной структуры 19 одинакова для всех и представляет собой, например, сферическую, параболическую или иную фокусирующую форму, причем фокус упомянутой формы расположен на первой оптической оси.
Предложенное устройство работает следующим образом.
В предложенном устройстве лидара (Фиг. 1, 2, 3, 4, 5, 6, 8, 9, 10, 11, 12) излучение от импульсного лазерного источника 13 последовательно проходит через коллиматор 14, кубический светоделитель 11, диэлектрическую прозрачную подложку 15, прозрачный электропроводящий слой 16, гелеобразный прозрачный слой 17, зазор 18 и отражается от диэлектрического зеркала 21. Модулированное излучение при прохождении первый раз гелеобразного прозрачного слоя 17 после отражения от диэлектрического зеркала 21 модулируется второй раз (усиливается) при прохождении фазового рельефа на гелеобразном прозрачном слое 17. Излучение с измененным набегом фаз на пикселях фазовой рельефной решетки поступает на кубический светоделитель 11 и выходную оптическую систему 3, с помощью которой модуляция фазовых набегов на пикселях фазовой рельефной решетки приводит к усилению угла сканирования объекта наблюдения 4. Отраженное импульсное излучение от объекта наблюдения 4 попадает на объектив 27, далее на полосовой оптический фильтр 28, который отфильтровывает оптические шумы. Далее оптический сигнал на фотоприемном элементе 29 преобразуется в электрический сигнал. Электрический сигнал проходит через согласующий электронный тракт 30 и регистрируется в электронной схеме 31. С помощью цифрового вычислителя 6 определяется расстояние от лидара до объекта следующим образом. Поскольку время отправления импульсного излучения регистрируется, то можно определить время прохождения излучения от лидара до объекта наблюдения 4 и время от объекта наблюдения 4 до объектива 27. Это позволяет определить расстояние от лидара до объекта, поскольку скорость света постоянна и известна. Кроме того, поскольку азимут каждого импульсного излучения известен, то в потребителе информации 7 последовательно точка за точкой может быть записана форма объекта наблюдения 4 и расстояние до объекта в целом (Фиг. 2). Электрические сигналы, которые вырабатываются цифровым вычислителем 6 в блоке управления 9 с помощью драйвера 8 и блока синхронизации 10, поступают в модулятор 12. В модуляторе 12 под действием электрических сигналов от матрицы 26 источников сигнала из n × m источников сигнала Uij в системе электродов 20 на матрице 23 электродов из n × m штук электродов, разделенных диэлектриком 24 от проводящей матричной сетки 22, создается модулированная напряженность электрического поля (Фиг. 1, 2, 3, 4). Для усиления этой напряженности используется источник опорного напряжения 25 U0, который подключен одним полюсом к прозрачному проводящему слою 16, а другим к проводящей сетке 22. (Фиг. 4). Под действием этой модулированной напряженности на поверхности гелеобразного прозрачного слоя 17 в зазоре 18 создается геометрический рельеф с периодом фазовой дифракционной решетки λ (Фиг. 3, 9, 10). Детально работа модулятора 12 описана в книге Ю.П. Гущо «Физика рельефографии» Наука, М., 1999. Применение проводящей матричной сетки 22 позволяет устранить перекрестное влияние сигналов и увеличить чувствительность управления лидаром. Высота рельефа регулируется заданным напряжением каждого источника сигнала матрицы 26. В свою очередь глубина рельефа изменяет набег фазы ψ когерентного лазерного излучения, который можно определить по формуле: ψ=2 √2nωlA, где А - глубина рельефа; ω1=2π/λl; λl - длина волны считывающего излучения; n=1,41 - коэффициент преломления гелеобразного слоя 17 (Фиг. 8, 9, 10). Задавая управляющие напряжения соответствующих областей модулятора U1(t)…U4(t) (Фиг. 10а) и амплитуды рельефа соответствующих областей фазового модулятора света a1(t)…a4(t) (Фиг. 10б), можно управлять волновым фронтом (Фиг. 8, 9, 10) светового излучения с целью сканирования объекта наблюдения 4. При этом с помощью адаптивной выходной оптической системы 3 может быть введена коррекция углов сканирования. Отраженное излучение от объекта наблюдения 4 поступает в приемный оптико-электронный тракт 5 и проходит через объектив 27, полосовой оптический фильтр 28 и поступает в фотоприемный элемент 29, где преобразуется в электрический сигнал (Фиг. 1, 5, 6). Этот электрический сигнал через согласующий электронный тракт 30 поступает в регистрирующую электронную схему 31. Далее электрический сигнал поступает в цифровой вычислитель 6, в котором происходит программная обработка полученных электрических сигналов. Выработанные сигналы передаются в потребитель информации 7, драйвер 8, блок управления 9 и блок синхронизации 10.
Достоинством предлагаемого лидара является возможность устранить оптические искажения благодаря симметричной позиции модулятора 12 на оптической оси с помощью использования кубического светоделителя 11 и диэлектрического зеркала 21. Другим достоинством предлагаемого лидара является возможность сканирования в виде круговых, секторных, винтовых, спиральных, конических, пилообразных, зигзагообразных, спирально-, конических, поступательно-конических траекторий (Э.А. Засовин и др. «Радиотехнические и радиооптические системы», М.: Круглый год, 752 с., 2001). Важным преимуществом лидара по сравнению с известными является возможность использования всего светового потока в каждой точке траектории сканирования. Еще одним достоинством лидара является возможность сканирования с помощью относительно небольшого количество элементов матрицы электродов. Необходимо отметить высокое быстродействие предлагаемого лидара благодаря применению модулятора 12. Его быстродействие (Фиг. 11) на 3 порядка выше, чем быстродействие модуляторов LCoS и DMD («LCoS spatial light modulators as active phase elements of full-field measurement systems and sensors», Kujawinska Malgorzata, Porras-Aguilar Rosario, Zaperty Weronika, Metrology and Measurement Systems, Index 330930, ISSN 0860-8229, Metrol. Meas. Syst, Vol. XIX (2012), No. 3, pp. 445-458; «Second-generation compound for the modulationof utrophin in the therapy of DMD», Simon Guiraud, Sarah E. Squire, Benjamin Edwards, Huijia Chen, David Т., Human Molecular Cenetics, 2015, 1-15). Особенно следует отметить уникальную оптическую полосу пропускания модулятора (Фиг. 12). На Фиг. 12 приведены экспериментальные характеристики оптической полосы пропускания от 0,4 до 25 мкм. В другом варианте осуществления устройство работает следующим образом (Фиг. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12). Излучение от импульсного лазерного источника 13 последовательно проходит через коллиматор 14, кубический светоделитель 11, вогнутую диэлектрическую прозрачную подложку 15, вогнутый прозрачный электропроводящий слой 16, вогнутый гелеобразный прозрачный слой 17, вогнутый зазор 18 и отражается от вогнутого диэлектрического зеркала 21. Таким образом, модулированное излучение при прохождении первый раз вогнутого гелеобразного прозрачного слоя 17 после отражения от вогнутого диэлектрического зеркала 21 второй раз модулируется (усиливается) при прохождении фазового рельефа на вогнутом гелеобразном прозрачном слое 17. Излучение с измененным набегом фаз на пикселях фазовой рельефной решетки поступает на кубический светоделитель 11 и выходную оптическую систему 3, с помощью которой модуляция фазовых набегов на пикселях фазовой рельефной решетки приводит к усилению угла сканирования объекта наблюдения 4. Кроме того, форма модулятора в виде вогнутого объектива совместно с выходной оптической системой 3 позволяет сократить габариты оптической системы 3 и тем самым габариты лидара.
Пример реализации изобретения
Устройство по настоящему изобретению может быть выполнено следующим образом.
В качестве когерентного импульсного лазерного источника света 11 могут быть использованы, например, полупроводниковые лазеры или лазеры на парах меди, золота, стронция, а также газовые лазеры. Для обеспечения достаточного уровня быстродействия и высокой энергоэффективности в качестве коммутирующих элементов драйвера когерентного источника света целесообразно применять транзисторы на нитриде галлия, позволяющие формировать зондирующие импульсы длительностью менее 1 не и оптической энергией не менее 70 нДж. Реализация устройства драйвера 8 может быть осуществлена известными методами (Alex Lidow, Johan Strydom, Michael de Rooij, David Reusch. GaN Transistors for Efficient Power Conversion, 2-nd Edition).
В качестве элементов приемного оптико-электронного тракта 5, цифрового вычислителя 6, потребителя информации 7, драйвера 8, блока управления 9, блока синхронизации 10 могут быть использованы стандартные микросхемы, или наборы микросхем, уровень интеграции зависит от технических требований устройств. Для управления матрицей 23 для оптимизации количества электрических соединений целесообразно использовать многоканальные драйверы с последовательной загрузкой данных в регистр-защелку и возможностью последовательного объединения (например, HV583).
Матрица электродов 23 и проводящая матричная сетка 22 могут быть выполнены из алюминия, хрома, молибдена, окиси индия. Их толщина может быть выбрана от десятых до сотых долей микрона. Зазор 18 толщиной, например, 10 мкм может быть заполнен воздухом или инертным газом. Толщину гелеобразного прозрачного слоя 17, можно выбрать, например, 60 мкм. Электрические сигналы на вход модулятора 12, могут быть, например, выбраны следующими: максимальное напряжение сигнала 15-20 Вольт, длительность управляющего импульса от 1 до 100 мкс. Опорное напряжение источника опорного напряжения 25 может быть выбрано, например, 50 Вольт. Диэлектрическая прозрачная подложка 15 и кубический светоделитель 11 могут быть выполнены, например, из кварцевого стекла. Прозрачный электропроводящий слой 16 может быть выполнен, например, из материалов на основе окиси индия. Матрица 26 из n × m источников сигнала может быть выполнена известными методами (Жан М. Рабаи, Ананта Чандракасан, Боривож Николич. Цифровые интегральные схемы. Методология проектирования Digital Integrated Circuits. - 2-е изд. - М.: «Вильяме», 2007. - С. 912). Гелеобразный прозрачный слой 15 приготавливают на основе полиорганосилоксана известными методами (Патент №2577802 Спеклоподавитель для лазерного излучения (варианты), классы МПК 7 G02F 1/00). В качестве остальных элементов и блоков могут быть использованы стандартные элементы и блоки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИДАР | 2020 |
|
RU2759260C1 |
| ФАЗИРОВАННЫЙ ЛИДАР | 2018 |
|
RU2690537C1 |
| ДИФРАКЦИОННЫЙ ЛИДАР | 2017 |
|
RU2680655C2 |
| ЛИДАР БЕЗ ПОДВИЖНЫХ ЧАСТЕЙ | 2017 |
|
RU2690990C2 |
| ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ | 2017 |
|
RU2687989C2 |
| ЭЛЕКТРООПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ, ГЕЛЕОБРАЗНЫЙ СЛОЙ ДЛЯ ЭЛЕКТРООПТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ, СПОСОБ ПРИГОТОВЛЕНИЯ ГЕЛЕОБРАЗНОГО СЛОЯ (ВАРИАНТЫ) И КОМПОЗИЦИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2002 |
|
RU2230348C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2050560C1 |
| ЛАЗЕРНЫЙ ОСВЕТИТЕЛЬ | 2017 |
|
RU2658572C1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНЫЙ КООРДИНАТОР ЦЕЛИ | 1989 |
|
RU2103707C1 |

Изобретение относится к лидарам с управлением лазерным излучением без подвижных частей с возможностью управления интенсивностью, частотой, фазовыми характеристиками и направлением светового излучения и может найти применение в ряде специальных областей: оптической локации, робототехнических комплексах, автомобильной промышленности, самолетостроении, беспилотной авиации, системах предупреждения столкновения с препятствиями, картографии и навигации, космической геодезии, системах машинного зрения, строительстве, горном деле, системах подводного зрения, при исследовании атмосферы, разминировании и при спасении людей на море и на суше. Сущность: компактный лидар дополнительно содержит электрооптический преобразователь, содержащий кубический светоделитель и модулятор, причем кубический светоделитель первой гранью перпендикулярен к первой оптической оси, а второй гранью, параллельной первой грани, обращен к модулятору, причем лазерный излучатель, кубический светоделитель и модулятор расположены на первой оптической оси, причем светоделительная линия кубического светоделителя расположена под 45 градусов к первой оптической оси, причем лазерный излучатель, электрооптический преобразователь расположены на первой оптической оси, при этом выходная оптическая система и кубический светоделитель находятся на второй оптической оси, перпендикулярной к первой оптической оси, причем вторая оптическая ось проходит через центр третьей грани кубического светоделителя, обращенной к выходной оптической системе, причем драйвер электрически связан с лазерным излучателем, блок управления электрически связан с электрооптическим преобразователем, цифровым вычислителем и блоком синхронизации, причем лазерный излучатель содержит импульсный лазерный источник и коллиматор, расположенные на первой оптической оси, перпендикулярной первой грани кубического светоделителя, причем модулятор содержит прозрачную диэлектрическую подложку, одна из сторон которой перпендикулярна первой оптической оси, а другая ее сторона последовательно оптически контактирует с прозрачным электропроводящим слоем, с гелеобразным слоем, с зазором и с трехслойной структурой, причем поверхность системы электродов, обращенная к зазору, покрыта диэлектрическим зеркалом, причем система электродов электрически контактирует с блоком управления, при этом система электродов содержит проводящую матричную сетку из диэлектрических ячеек. Выходная оптическая система содержит адаптивную оптику, оптически направленную на объект наблюдения, при этом приемный оптико-электронный тракт оптически направлен на объект наблюдения и содержит объектив, полосовой оптический фильтр, фотоприемный элемент, согласующий электронный тракт, регистрирующую электронную схему, причем объектив, полосовой оптический фильтр и фотоприемный элемент расположены на одной оптической оси, а фотоприемный элемент электрически соединен с согласующим электронным трактом, при этом согласующий электронный тракт, электрически соединен с регистрирующей электронной схемой, при этом регистрирующая электронная схема электрически соединена с цифровым вычислителем, при этом цифровой вычислитель электрически соединен с драйвером и блоком синхронизации. Технический результат: расширение сферы применения, уменьшение габаритов лидара. 1 з.п. ф-лы, 12 ил. 
1. Компактный лидар, состоящий из лазерного излучателя, выходной оптической системы, направленной на объект наблюдения, приемного оптико-электронного тракта, направленного на объект наблюдения, электрически связанного с цифровым вычислителем, потребителя информации, электрически связанного с цифровым вычислителем, драйвера, блока управления, блока синхронизации, отличающегося тем, что в компактный лидар введен электрооптический преобразователь, содержащий кубический светоделитель и модулятор, причем кубический светоделитель первой гранью перпендикулярен к первой оптической оси, а второй гранью, параллельной первой грани, обращен к модулятору, причем лазерный излучатель, кубический светоделитель и модулятор расположены на первой оптической оси, причем светоделительная линия кубического светоделителя расположена под 45 градусов к первой оптической оси, причем лазерный излучатель, электрооптический преобразователь расположены на первой оптической оси, при этом выходная оптическая система и кубический светоделитель находятся на второй оптической оси, перпендикулярной к первой оптической оси, причем вторая оптическая ось проходит через центр третьей грани кубического светоделителя, обращенной к выходной оптической системе, причем драйвер электрически связан с лазерным излучателем, блок управления электрически связан с электрооптическим преобразователем, цифровым вычислителем и блоком синхронизации, причем лазерный излучатель содержит импульсный лазерный источник и коллиматор, расположенные на первой оптической оси, перпендикулярной первой грани кубического светоделителя, причем модулятор содержит прозрачную диэлектрическую подложку, одна из сторон которой перпендикулярна первой оптической оси, а другая ее сторона последовательно оптически контактирует с прозрачным электропроводящим слоем, с гелеобразным слоем, с зазором и с трехслойной структурой, причем поверхность системы электродов, обращенная к зазору, покрыта диэлектрическим зеркалом, причем система электродов электрически контактирует с блоком управления, при этом система электродов содержит проводящую матричную сетку с n × m штуками диэлектрических ячеек pij, причем в ячейках проводящей матричной сетки размещена матрица электродов из n × m штук электродов, причем каждый электрод матрицы электродов разделен диэлектриком от проводящей матричной сетки, причем проводящая матричная сетка электрически соединена с блоком управления, содержащим источник опорного напряжения и матрицу источников сигнала из n × m источников сигнала Uij, при этом первый полюс источника опорного напряжения подключен к прозрачному проводящему слою, а второй полюс источника опорного напряжения соединен с проводящей матричной сеткой, при этом каждый электрод из матрицы электродов электрически соединен с каждым соответствующим источником матрицы источников сигала из n × m источников сигнала Uij, при этом другой полюс каждого из источников матрицы источников сигнала из n × m источников сигнала Uij заземлен, причем блок синхронизации электрически соединен с драйвером лазерного излучателя и с блоком управления, при этом выходная оптическая система содержит адаптивную оптику, оптически направленную на объект наблюдения, при этом приемный оптико-электронный тракт оптически направлен на объект наблюдения и содержит объектив, полосовой оптический фильтр, фотоприемный элемент, согласующий электронный тракт, регистрирующую электронную схему, причем объектив, полосовой оптический фильтр и фотоприемный элемент расположены на одной оптической оси, а фотоприемный элемент электрически соединен с согласующим электронным трактом, при этом согласующий электронный тракт электрически соединен с регистрирующей электронной схемой, при этом регистрирующая электронная схема электрически соединена с цифровым вычислителем, при этом цифровой вычислитель электрически соединен с драйвером и блоком синхронизации.
2. Компактный лидар по п. 1, отличающийся тем, что в модулятор введены последовательно расположенные вогнутая прозрачная диэлектрическая подложка, вогнутый прозрачный электропроводящий слой, вогнутый гелеобразный слой, вогнутый зазор, вогнутая трехслойная структура, причем вогнутая прозрачная диэлектрическая подложка вогнутой стороной направлена на лазерный излучатель, при этом форма вогнутого прозрачного электропроводящего слоя, вогнутого гелеобразного слоя, вогнутого зазора, вогнутой трехслойной структуры одинакова для всех и представляет собой сферическую, параболическую или иную фокусирующую форму, причем фокус упомянутой формы расположен на первой оптической оси.
| ФАЗИРОВАННЫЙ ЛИДАР | 2018 |
|
RU2690537C1 |
| ДИФРАКЦИОННЫЙ ЛИДАР | 2017 |
|
RU2680655C2 |
| ЛИДАР БЕЗ ПОДВИЖНЫХ ЧАСТЕЙ | 2017 |
|
RU2690990C2 |
| US 20150219764 A1, 06.08.2015 | |||
| US 20200025892 A1, 23.01.2020. | |||

