Изобретение относится к измерительной технике и может быть использовано для высокоточного определения резонансной частоты различного типа резонаторов, а также величин, которые функционально связаны с резонансной частотой резонаторов, входящих в состав частотных датчиков и применяемых в различных областях техники и научных исследованиях. В частности оно может быть использовано в радиочастотных резонансных датчиках влагосодержания нефтепродуктов, концентрации растворов и резонансных уровнемерах различных сред.
Известны различные способы измерения резонансной частоты, например, способ (RU 2541119 С1, 20.09.2013), который заключается в том, что на вход исследуемого резонатора периодически подают колебания с частотой изменяющейся дискретно с заданным шагом в прямом и обратном направлении по симметричному закону в диапазоне изменения измеряемой резонансной частоты. При этом формируют случайный сигнал, которым модулируют колебания, подаваемые на вход резонатора, фиксируют в каждом полупериоде этих изменений экстремум АЧХ резонатора и соответствующую этому экстремуму частоту и определяют резонансную частоту как среднее значение зафиксированных частот экстремумов за некоторое количество указанных полупериодов.
Недостатком этого способа является низкое быстродействие и высокие требования к вычислительным ресурсам при его реализации.
Наиболее близким к предлагаемому способу по технической сущности является способ измерения резонансной частоты, описанный и реализованный в устройстве (SU 1758510 А1, 30.08.1992), и принятый в качестве прототипа. Согласно этому способу высокочастотный генератор, управляемый напряжением (ГУН), автоматически настраивается на резонансную частоту резонансного датчика и отслеживает все ее изменения. При этом частота высокочастотного генератора осциллирует около максимума амплитудно-частотной характеристики (АЧХ) этого датчика и усредненное значение этой частоты принимается равным резонансной частоте этого датчика.
Недостатком способа-прототипа, реализованного в указанном устройстве, является неустойчивая работа устройства, реализующего этот способ, в условиях помех, а также наличие существенной погрешности измерения резонансной частоты. Эта погрешность зависит от амплитуды входного сигнала, уровня шума, порога срабатывания компаратора, входящего в состав указанного устройства, и стабильности этого порога, а также нелинейности модуляционной характеристики ГУН.
Задачей настоящего изобретения является расширение арсенала технических средств.
Техническим результатом изобретения является повышение точности измерения резонансной частоты.
Технический результат в предлагаемом способе измерения резонансной частоты резонатора достигается тем, что осуществляют режим поиска резонансной частоты, в котором на каждой i-ой итерации на вход резонатора последовательно подают сигналы с частотами ƒi - b и ƒi + b, находящимися в диапазоне изменения измеряемой резонансной частоты, измеряют амплитуды сигналов на выходе резонатора  и
и  , соответствующие указанным частотам, затем вычисляют частоту по формуле
, соответствующие указанным частотам, затем вычисляют частоту по формуле

где b и h - параметры, определяющие время настройки на резонансную частоту и точность измерения этой частоты, а также определяют знак разности напряжений  -
-  и при изменении этого знака осуществляют режим слежения за резонансной частотой, в котором сравнивают частоты fi+1 и ƒi если на i-ой итерации модуль разности этих частот меньше чем величина ε, определяемая заданной погрешностью измерения резонансной частоты, то на всех последующих итерациях фиксируют частоты ƒi и резонансную частоту определяют как среднее значение этих зафиксированных частот. При этом в режиме поиска устанавливают значения параметров b и h исходя из требования к времени настройки на резонансную частоту, а в режиме слежения - исходя из требования к точности измерения этой частоты.
и при изменении этого знака осуществляют режим слежения за резонансной частотой, в котором сравнивают частоты fi+1 и ƒi если на i-ой итерации модуль разности этих частот меньше чем величина ε, определяемая заданной погрешностью измерения резонансной частоты, то на всех последующих итерациях фиксируют частоты ƒi и резонансную частоту определяют как среднее значение этих зафиксированных частот. При этом в режиме поиска устанавливают значения параметров b и h исходя из требования к времени настройки на резонансную частоту, а в режиме слежения - исходя из требования к точности измерения этой частоты.
Предлагаемое изобретение поясняется следующими чертежами.
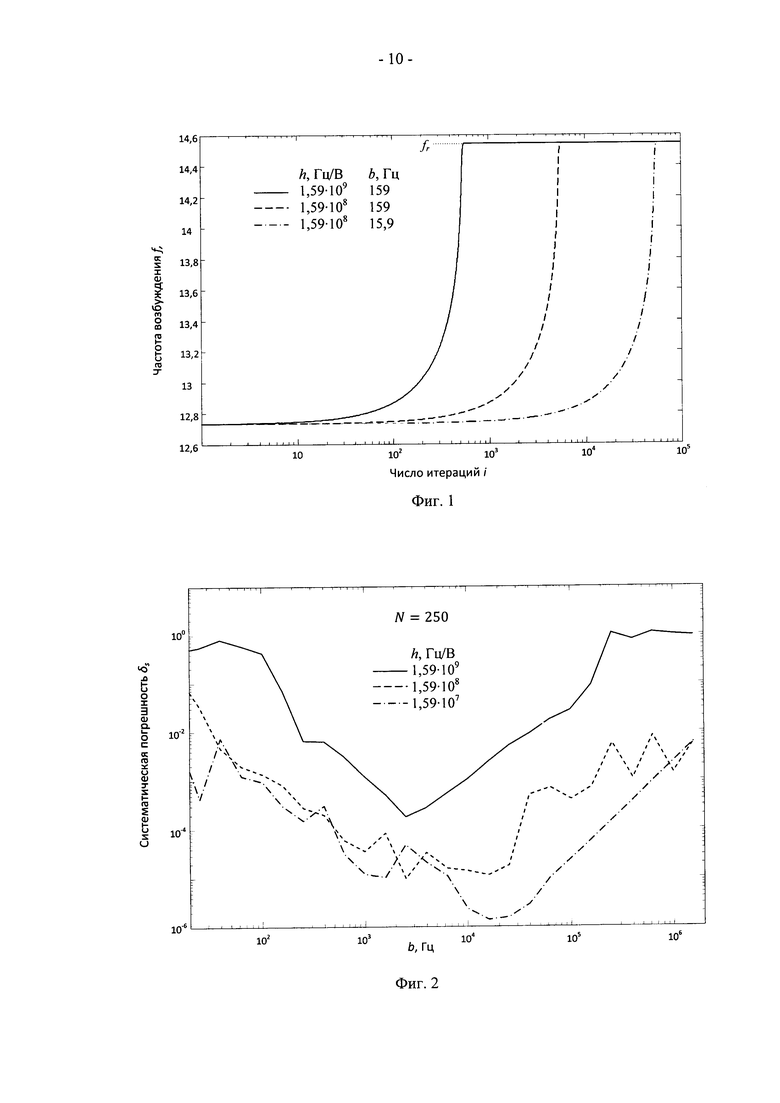
Фиг. 1 - изменение частоты возбуждения ƒi, в режиме поиска в зависимости от числа итераций i и параметров b и h.
Фиг. 2 - зависимость относительной систематической погрешности δs от параметров b и h.
Фиг. 3 - зависимость относительной случайной погрешности δr от параметров b и h.
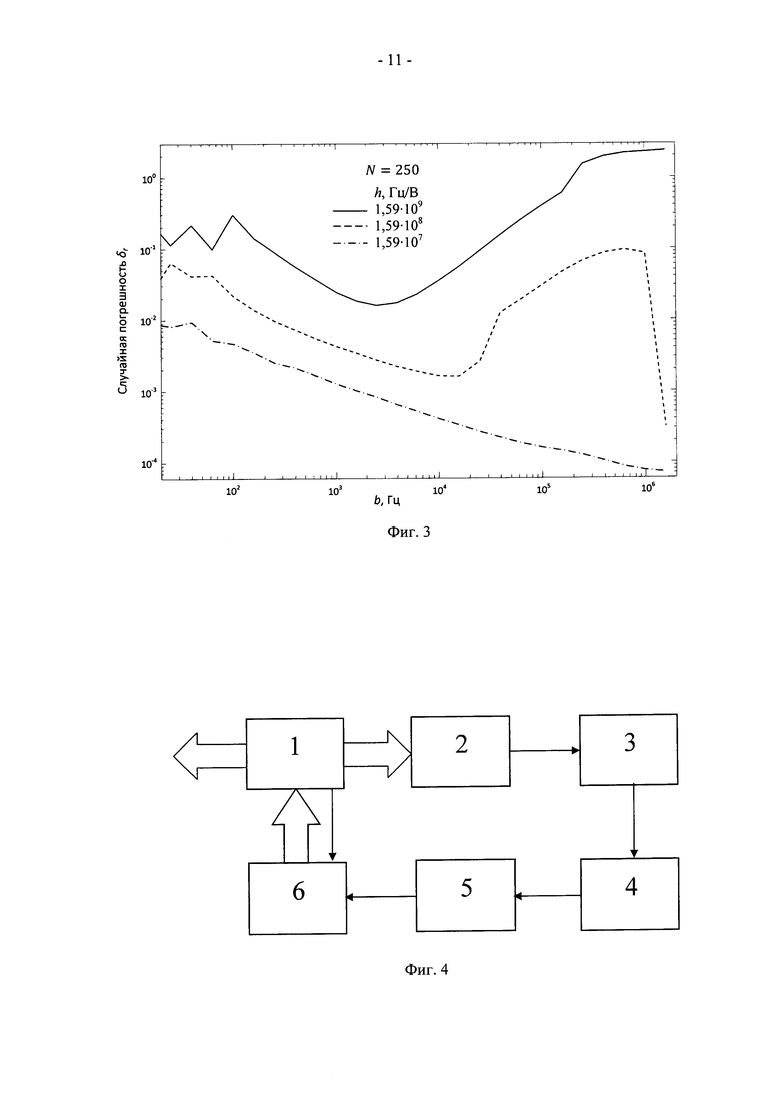
Фиг. 4 - структурная схема устройства, реализующего предлагаемый способ.
Сущность предлагаемого изобретения заключается в том, что в начале процесса измерения, т.е., в режиме поиска осуществляют грубую настройку на резонансную частоту. Для этого на вход исследуемого резонатора последовательно подают сигналы с частотами ƒi - b и ƒi+b, где i=1,2, …; b - смещение частоты возбуждения ƒi, значение которого определяется условиями измерения, а именно, уровнем шума на выходе резонатора и параметрами резонатора, а также заданным временем настройки на резонансную частоту. Режим поиска начинается с частоты ƒ1 которая должна находиться в пределах диапазона изменения измеряемой резонансной частоты. На выходе резонатора измеряют напряжения сигналов  и
и  , соответствующие частотам ƒi - b и ƒi + b, и затем вычисляют частоту ƒi+1 по реккурентной формуле, справедливой для выпуклой АЧХ,
, соответствующие частотам ƒi - b и ƒi + b, и затем вычисляют частоту ƒi+1 по реккурентной формуле, справедливой для выпуклой АЧХ,

где h - коэффициент, также определяющий время настройки на резонансную частоту. При этом, если ƒi находится на склоне АЧХ с положительной крутизной, то в режиме поиска имеют место соотношения  и ƒi < ƒr. В результате последовательного выполнения алгоритма (1) частота ƒi приближается к резонансной частоте ƒr и когда становится ƒi > ƒr, то разность
и ƒi < ƒr. В результате последовательного выполнения алгоритма (1) частота ƒi приближается к резонансной частоте ƒr и когда становится ƒi > ƒr, то разность  -
-  меняет свой знак на обратный. В этот момент осуществляется переход в режим слежения и переключение параметров b и h с одних значений на другие существенно меньшие, чем в режиме поиска. В режиме слежения значения этих параметров обусловлены требованиями к точности измерения резонансной частоты. В режиме слежения вследствие выполнения алгоритма (1) частота ƒi колеблется вокруг резонансной частоты. Эти колебания при i ∞ имеют затухающий характер, так как в окрестности ƒr крутизна АЧХ стремится к нулю и поэтому
меняет свой знак на обратный. В этот момент осуществляется переход в режим слежения и переключение параметров b и h с одних значений на другие существенно меньшие, чем в режиме поиска. В режиме слежения значения этих параметров обусловлены требованиями к точности измерения резонансной частоты. В режиме слежения вследствие выполнения алгоритма (1) частота ƒi колеблется вокруг резонансной частоты. Эти колебания при i ∞ имеют затухающий характер, так как в окрестности ƒr крутизна АЧХ стремится к нулю и поэтому  , следовательно, и ƒi+1 ƒI ƒr. Если на i-ой итерации выполняется соотношение |ƒi+1-ƒi| ≤ где ε - величина, определяемая заданной погрешностью измерения резонансной частоты, то все последующие частоты ƒi фиксируются и усредняются и это среднее значение принимается равным резонансной частоте. Усреднение позволяет снизить случайную погрешность, обусловленную наличием шумов.
, следовательно, и ƒi+1 ƒI ƒr. Если на i-ой итерации выполняется соотношение |ƒi+1-ƒi| ≤ где ε - величина, определяемая заданной погрешностью измерения резонансной частоты, то все последующие частоты ƒi фиксируются и усредняются и это среднее значение принимается равным резонансной частоте. Усреднение позволяет снизить случайную погрешность, обусловленную наличием шумов.
Следует отметить, что для вогнутой АЧХ формула (1) должна быть записана со знаком минус, т.е.,

Далее все пояснения в тексте относятся только к случаю выпуклой АЧХ, когда ƒ1 находится на склоне АЧХ с положительной крутизной.
В режиме слежения частоты ƒi и ƒi+1 расположены симметрично относительно ƒr, и поэтому искажения резонансной кривой, возникающие вследствие переходных процессов в резонаторе, взаимно компенсируются и погрешность измерения резонансной частоты, обусловленная этими процессами, здесь минимальная.
Поскольку резонансная частота обычно изменяется в широком диапазоне, то к параметрам b и h в режиме поиска и слежения предъявляются разные требования. Например, чтобы в режиме поиска уменьшить количество итераций, за которое происходит процесс настройки на резонансную частоту, соответственно и время настройки на эту частоту, значения b и h должны быть достаточно большими. Если допустить что зависимость АЧХ от частоты является линейной, то количество итераций необходимое для реализации режима поиска I можно приближенно оценить по формуле

где ƒr, ƒ1 - резонансная частота и начальная частота диапазона поиска соответственно;
Um - максимальное напряжение на выходе резонатора.
Следовательно, как видно из формулы (2), чтобы уменьшить время настройки на резонансную частоту, которое непосредственно связано с количеством итераций I, необходимо увеличивать параметры b и h, что также демонстрируют кривые зависимостей частоты ƒi от номера итерации i для различных значений b и h на фиг. 1, на котором наклонные линии соответствуют режиму поиска, а горизонтальная линия - режиму слежения.
Кроме этого при работе в условиях шумов для надежной реализации режима поиска также необходимо выполнение неравенства  при любом уровне шума.
при любом уровне шума.
Учитывая это последнее неравенство можно записать в виде

где σ - среднее квадратическое отклонение нормально распределенного шума.
Чтобы сформулировать требование к минимальному значению b в режиме поиска, воспользуемся известным уравнением резонансной кривой (Лосев А.К. Линейные радиотехнические цепи. М.: Высшая школа. 1971, стр. 230)

где Ui, Um - текущее и максимальное значение АЧХ резонатора соответственно;
Q - добротность резонатора.
Подставляя в (3) уравнение (4) и полагая, что ƒi << ƒr, неравенство (3) можно привести к виду

где N=Um/σ - отношение сигнал/шум на выходе резонатора.
Неравенство (5) является необходимым условием реализации режима поиска.
В режиме слежения, чтобы обеспечить устойчивость этого режима и высокую точность измерения резонансной частоты, параметры b и h должны быть существенно меньше, чем в режиме поиска. Требования к этим параметрам в режиме слежения можно сформулировать, используя выражения (1) и (4). Для этого уравнение (4) для ƒi ≈ ƒr - следует представить в приближенном виде

Так как в режиме слежения можно допустить

то, используя (6) и (7), для i + 1-й итерации формулу (1) можно записать как

Для i + 2-й итерации, подставляя в (1) последнее выражение, получим 
и аналогично для i + k -ой итерации

где k - номер итерации в режиме слежения.
Из (8) видно, что разность ƒi+k - ƒi+k-1 0 при k ∞, если  или
или

Неравенство (9) ограничивает параметры b и h сверху и при его выполнение гарантирует сходимость алгоритма (1), а именно, при i ∞ ƒi ƒr. Но кроме этого параметры b и h должны быть ограничены также и снизу, что обусловлено требованиями к максимальной допустимой погрешности измерения. Как показывают графики на фиг. 2 существует оптимальное значение параметра b, при котором систематическая погрешность минимальная. При наличии шумов это оптимальное значение bopt, можно оценить, если в режиме слежения при ƒi ≈ ƒr потребовать выполнения неравенства  , если Ui находится на склоне АЧХ с отрицательной крутизной и
, если Ui находится на склоне АЧХ с отрицательной крутизной и  , если эта крутизна положительная. Предельное значение разности
, если эта крутизна положительная. Предельное значение разности  -
-  , учитывая шумы, при этом должно составлять
, учитывая шумы, при этом должно составлять

где σ - среднее квадратическое отклонение нормально распределенного шума.
Подставляя в (10) выражение (6) получим приближенную формулу для bopt
Как показывают графики на фиг. 2 и 3, оптимальные значения b для случайной и систематической погрешности не совпадают, однако основным критерием при выборе b является минимум систематической погрешности, поскольку случайная погрешность может быть снижена путем усреднения частот ƒi.
Таким образом, чтобы обеспечить малое время настройки на резонансную частоту в режиме поиска и высокую точность измерения этой частоты в режиме слежения необходимо устанавливать разные значения параметров b и h в зависимости от реализуемого режима. Однако если диапазон изменения резонансной частоты соизмерим с шириной полосы пропускания резонатора, и длительность режима поиска не имеет существенного значения, то допускается устанавливать постоянные значения параметров b и h при выполнении условий (5) и (9).
Предлагаемый способ может быть осуществлен по схеме устройства (фиг. 4), состоящего из цифрового сигнального процессора (ЦСП) 1, синтезатора частоты (СЧ) 2, фильтра низких частот (ФНЧ) 3, исследуемого резонатора 4, амплитудного детектора 5 и аналого-цифрового преобразователя (АЦП) 6.
Указанное устройство работает следующим образом. В режиме поиска на i-й итерации ЦСП 1 последовательно формирует коды, соответствующие частотам ƒi ± b для управления частотой СЧ 2 и выполняет вычисления по алгоритму (1), с заданными значениями параметров b и h в зависимости от реализуемого режима. С выхода СЧ 2 высокочастотные сигналы с частотами ƒi ± b подаются на вход ФНЧ 3, который предназначен для подавления гармоник, присутствующих в выходном сигнале СЧ 2, и затем на вход исследуемого резонатора 4. Детектор 5 выделяет напряжения  и
и  соответствующие амплитудам сигнала на выходе резонатора на частотах ƒi ± b. Эти напряжения поступают на вход АЦП 6, где преобразуются в цифровые коды и затем эти коды поступают на ЦСП 1, в котором на i-й итерации происходит вычисление частоты ƒi+1 по формуле (1) с соответствующими значениями b и h и сравнение напряжений
соответствующие амплитудам сигнала на выходе резонатора на частотах ƒi ± b. Эти напряжения поступают на вход АЦП 6, где преобразуются в цифровые коды и затем эти коды поступают на ЦСП 1, в котором на i-й итерации происходит вычисление частоты ƒi+1 по формуле (1) с соответствующими значениями b и h и сравнение напряжений  и
и  .
.
Когда разность напряжений  -
-  меняет свой знак на противоположный, то устройство переходит в режим слежения, в котором также происходит вычисление ƒi+1, но с другими значениями b и h. Помимо этого в режиме слежения также выполняется сравнение частот fi+1 и ƒi и если |ƒi+1 - ƒi| ≤ ε, то частоты ƒi усредняются и среднее значение этих частот принимается равным резонансной частоте ƒr.
меняет свой знак на противоположный, то устройство переходит в режим слежения, в котором также происходит вычисление ƒi+1, но с другими значениями b и h. Помимо этого в режиме слежения также выполняется сравнение частот fi+1 и ƒi и если |ƒi+1 - ƒi| ≤ ε, то частоты ƒi усредняются и среднее значение этих частот принимается равным резонансной частоте ƒr.
Предлагаемый способ был исследован экспериментально на созданной в среде Matlab модели резонатора с параметрами ƒr = 14,54 МГц, Q = 22,22 и Um = 0,0264 В. На фиг. 2 и 3 представлены полученные на этой модели кривые зависимостей относительной систематической и случайной погрешности соответственно δs и δr от параметра b для различных значений параметра h и отношения сигнал/шум на выходе резонатора N = 250. Из этих кривых видно, что например, для h=1,59⋅107 Гц/В и bopt ≅ 2⋅104 Гц обеспечивается систематическая погрешность δS=1,5⋅10-6 и случайная погрешность δr=3⋅10-4, что подтверждает высокую эффективность предлагаемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РЕЗОНАНСНОЙ ЧАСТОТЫ И ДОБРОТНОСТИ | 2020 |
|
RU2765836C2 |
| СПОСОБ ИЗМЕРЕНИЯ РЕЗОНАНСНОЙ ЧАСТОТЫ | 2013 |
|
RU2541119C1 |
| Устройство для измерения параметровВАРиКАпОВ | 1978 |
|
SU800911A1 |
| ЦИФРОВОЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ЭЛЕМЕНТОВ | 2014 |
|
RU2584719C1 |
| Устройство для измерения добротностии ЕМКОСТи ВАРиКАпОВ | 1978 |
|
SU800910A1 |
| Устройство для бесконтактного измерения уровня расплава в кристаллизаторе | 1990 |
|
SU1764795A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДОБРОТНОСТИ РЕЗОНАТОРА | 2019 |
|
RU2712784C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЛАГОСОДЕРЖАНИЯ ТРЕХКОМПОНЕНТНЫХ СМЕСЕЙ ИЗ ДОБЫВАЮЩИХ НЕФТЯНЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2386953C2 |
| Устройство для определения собственных параметров резонирующих тел | 1985 |
|
SU1319823A1 |
Изобретение относится к измерительной технике и может быть использовано для высокоточного определения резонансной частоты различного типа резонаторов. Способ измерения резонансной частоты содержит этапы, на которых осуществляют режим поиска резонансной частоты, в котором на каждой i-й итерации на вход резонатора последовательно подают сигналы с частотами ƒi-b и ƒi+b, находящимися в диапазоне изменения измеряемой резонансной частоты, измеряют амплитуды сигналов на выходе резонатора  и
и  , соответствующие указанным частотам, затем вычисляют частоту ƒi+1, а также определяют знак разности напряжений
, соответствующие указанным частотам, затем вычисляют частоту ƒi+1, а также определяют знак разности напряжений  и при изменении этого знака осуществляют режим слежения за резонансной частотой, в котором сравнивают частоты ƒi+1 и ƒi, и если на i-й итерации модуль разности этих частот меньше, чем величина, определяемая заданной погрешностью измерения резонансной частоты, то на всех последующих итерациях фиксируют частоты ƒi и резонансную частоту определяют как среднее значение этих зафиксированных частот. Технический результат – повышение точности измерения резонансной частоты. 1 з.п. ф-лы, 4 ил.
и при изменении этого знака осуществляют режим слежения за резонансной частотой, в котором сравнивают частоты ƒi+1 и ƒi, и если на i-й итерации модуль разности этих частот меньше, чем величина, определяемая заданной погрешностью измерения резонансной частоты, то на всех последующих итерациях фиксируют частоты ƒi и резонансную частоту определяют как среднее значение этих зафиксированных частот. Технический результат – повышение точности измерения резонансной частоты. 1 з.п. ф-лы, 4 ил.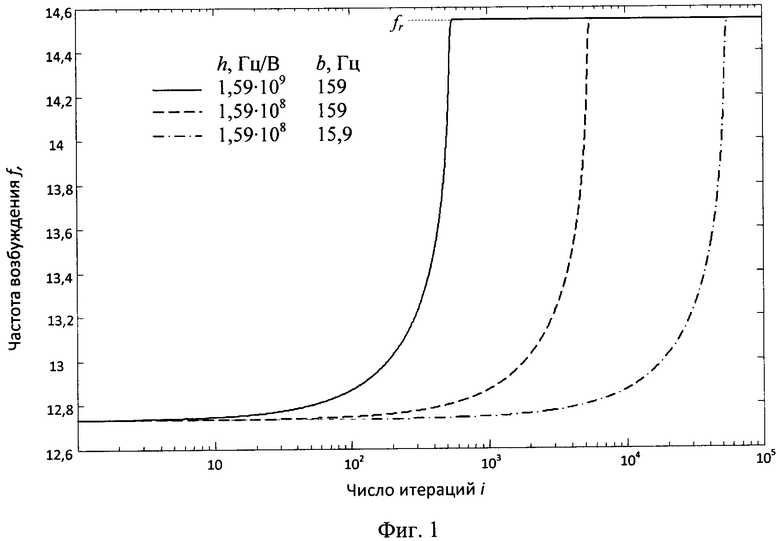
1. Способ измерения резонансной частоты, характеризующийся тем, что осуществляют режим поиска резонансной частоты, в котором на каждой i-й итерации на вход резонатора последовательно подают сигналы с частотами ƒi-b и ƒi+b, находящимися в диапазоне изменения измеряемой резонансной частоты, измеряют амплитуды сигналов на выходе резонатора  и
и  , соответствующие указанным частотам, затем вычисляют частоту ƒi+1 по формуле
, соответствующие указанным частотам, затем вычисляют частоту ƒi+1 по формуле

где b и h - параметры, определяющие время настройки на резонансную частоту и точность измерения этой частоты, а также определяют знак разности напряжений  и при изменении этого знака осуществляют режим слежения за резонансной частотой, в котором сравнивают частоты ƒi+1 и ƒi, и если на i-й итерации модуль разности этих частот меньше, чем величина ε, определяемая заданной погрешностью измерения резонансной частоты, то на всех последующих итерациях фиксируют частоты ƒi и резонансную частоту определяют как среднее значение этих зафиксированных частот.
и при изменении этого знака осуществляют режим слежения за резонансной частотой, в котором сравнивают частоты ƒi+1 и ƒi, и если на i-й итерации модуль разности этих частот меньше, чем величина ε, определяемая заданной погрешностью измерения резонансной частоты, то на всех последующих итерациях фиксируют частоты ƒi и резонансную частоту определяют как среднее значение этих зафиксированных частот.
2. Способ по п. 1, характеризующийся тем, что в режиме поиска устанавливают значения параметров b и h исходя из требований к времени настройки на резонансную частоту, а в режиме слежения устанавливают значения b и h исходя из требований к точности измерения этой частоты.
| Устройство для определения плотности потока в трубопроводе | 1990 |
|
SU1758510A1 |
| СПОСОБ ИЗМЕРЕНИЯ РЕЗОНАНСНОЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2367965C1 |
| Способ измерения резонансной частоты промежуточного резонатора усилительного клистрона | 1980 |
|
SU883777A1 |
| US 6288530 B1, 11.09.2001. | |||

