тогу напряжения возбуждения пьезотрак- сформатора наряду с указанным воздействием аналогового сигнала управления на амплитуду напряжения возбуждения. Причем в качестве опорного сигнала при формировании аналогового сигнала управления используют результат зап оминания
: йаксймального значения вьгхШкбго напряжения.
Устройство для осуществления способа, содержащее пьезотрансформатор, одни обкладки которого служат для подключения выходной цепи, а другие соединены с вьгходом уйилйтеля мощности, один вход которрго соединен с вьгходом регул ятора амплитудЬг, вход ксггорого сбединен с вьгходом узла сравнения, и датчик . обратной связи, соединенный с выходной цепью, и снабжено последовательно соединенными компаратором, ключом, управляющим триггером и интегратором, командным генератором, соединенным вь1ходом через дифференцирующую цепочку с ключом и управляющим триггером, а входом через другую дифференцирующую цепочку с вьгходом компаратора, а также двумя схемами запоминания, одна из которых включена между выходом введенного.первого повторителя и входом узла сравненйя, а другая - между вьгходом второго введенного повторителя и входом компаратора, причем входы
повторителей соединены с вьгходом датчика обратной связи, а выход интегра Тора соединен со входом введенного ре-- гулятора частоты, выходом соединенного с другим входом усилителя мощности.
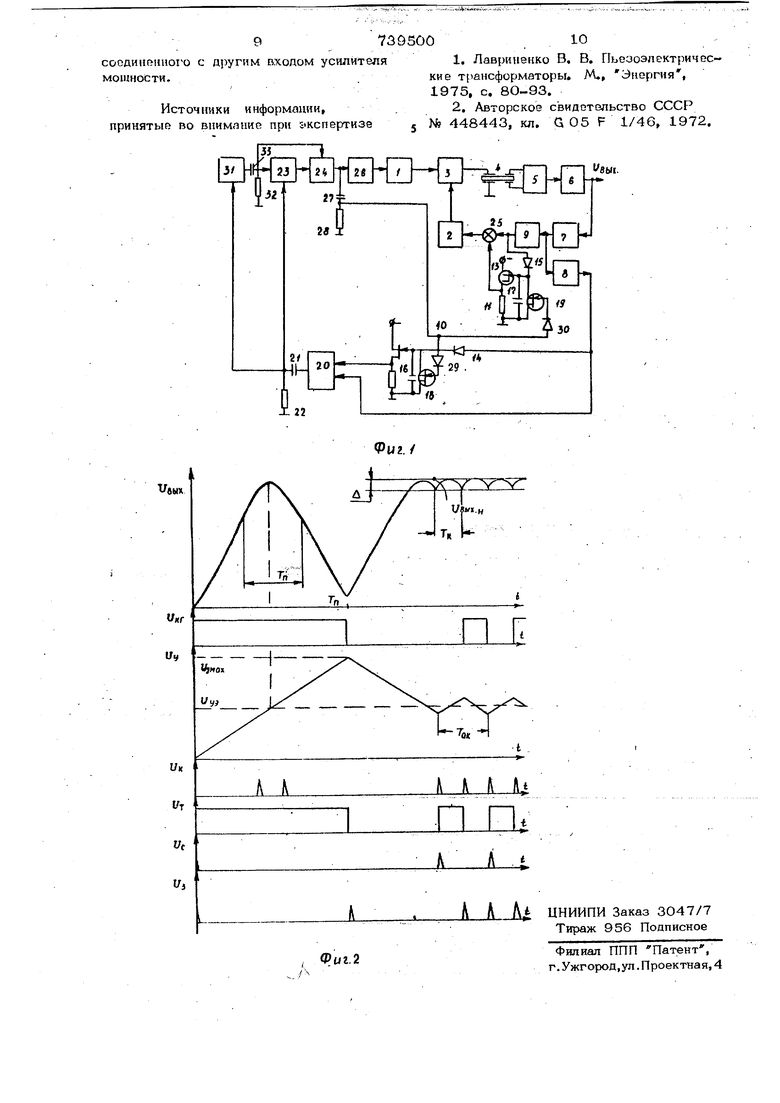
На фиг. 1 приведена схема стабилизированного пьезополупроводникового преобразователя; на фиг. 2 - временные диаграммы работы преобразователя.
Пьезополупроводниковый преобразователь содержит регулятор 1 частоты (управляемый задающий генератор) и регулятор 2 амплитуды, сигналы с выхода которых поступают на усилитель 3 мощности. Усилитель мощности нагружен на ПЭТ 4, который через выпрямитель (схему умножения) 5 с фильтром связан с нагрузкой 6. Напряжение с нагрузки поступает на датчик обратной связи 7 и транзисторные повторители 8 и 9 напряжения на схемы 10 и 11 запоминания.:
Схемы запоминания идентичны и
...... йьшШнёны на полёшзгх транзисТбрах 12 и 13, в цепь затвора которых включены диодно-емкостные запоминающие
цепочки на диодах 14и 15 и ко щенсатррах1ви17 и ключи разряда на транзисторах 18 и 19, Схемы запоминания фиксируют максимальное (экстремальное) значение Ug,,, и запоминают его.
Выход схемы 10 запоминания и выход повторителя 8 напряжения соединены со входом компаратора 20, выход ксхгорого соединен через дифференцирующую цепочку на конденсаторе 21 и резисторе 22 и ключ 23 со входом управляющего триггера 24. Выход схемы 11 запоминания и В1згход повторителя 9 напряжения соединены с узлом 25 сравнения, вьЕХод которого соединен с регулятором 2 амплитуды. Выход управляющего трипгера 24 через интегратор 26 соединен с регулятором 1 частоты, а также через
дифференцирующую цепочку из конденсатора 27 и резистора 28, и диоды 29 и ЗО с ключами разряда (на транзисторах 18 и 19) схем запоминания. Для запуска схёглы служит командный генератор 31 (на основе мультивибратора), осуществляющий также временную синхронизацию работы элементов схемы (импульсь Uj , см, фиг. 2), Командный генератор 31 соединен через дифференцируюшую цепочку из резистора 32 и . конденсатора 33 с ключом 23 и управляющим триггером 24.
Работа пьезополупроводникового преобразователя с предлагаемым способом
адаптивного управления осуществляется следующим образом.
При действии сильных возмущений (нагрузочных, температурных, механических) у ПЭТ 4 имеет место дрейф его амплитудно-частотных характеристик (АЧХ), более слабые возмущения йызываюнг дрейф рабочей точки по склонам АЧХ ПЭТ.. Дрейф АЧХ ПЭТ сопровождается изменением положения ее экстремума
(максимума иgbix ) Например, при увеличении тока нагрузки от номинального (согласованного) режима экстремума АЧХ перемещается влево (по оси абсцисс) и вниз (по оси ординат), Пьезополупроводниковый лреобразователь с предлагаемым способом адаптивного управления осуществляет автоматически поиск экстремума АЧХ, непрерьюное слежение за ним и стабилизацию заданного значения
выходного напряжения. Запуск преобразователя производится импульсом, командного генератора 31, Первый импульс генератора 31 ( U|y- ) является поисковым (см. фиг, 2), длительность его Т тако ва, чтобы обеспечить прохождение рабочего диапазона изменения резонансной частоты i р ПЭТ при AeflcTsnvt сильнык возмущений (обычно не более 5-7% от i Ро где f рд- - резонансная частота ПЭТ в режимэ холостого хода). От первого импульса генератора 31 ключ 23 размыкается (блокирует прохождение импульсов с компаратора 20 на вхо управляющего триггера 24), управляющий триггер 24 (импульсы U- ,фиг. 2) запускает интегратор 26, Интегратор формирует линейно-изменяющееся управляющее напряжение U с периодом Т (фиг, 2), Под действием Uy изменяет ся частота на выходе регулятора частот 1 и, следовательно, изменяется частота р на входе ПЭТ, При этом капряже.ние на выходе преобразователя изменяет ся в соответствии с АЧХ ПЭТ, Схемы . запоминания 1О и 11 фиксируют за период Т значения Ugbix.max (конденсаторы 16 и 17, благодаря диодам 14 и 15, фиксируют только положительные приращения Uebix,) истечении первого импульса командного генератора 31 (врем ни Т п ) осуществляется замыкание вдю ча 23 и переключение триггера 24 (перевод в О), Напряжение Uy изменяется в сторону уменьшения (реверсируется) от значения UY,YICXX До уэ соответствующего резонансной частоте по ДЧХ ПЭТ и, следовательно, U (фиг, 2), При определенной величине разности между значением Uy и текущим . д - зона нечувствительности компаратора 20) срабатывает компаратор 2О и переключает управляющий триггер 24, При этом DV начинает снова увеличиваться и при переходе .значения. U опять срабатывает компаратор 20 ит,д. Схема захватывает экстремальное зкаче- и осуществляет нопрерьшное смещение задним в автоколебательномрежиме с периодом Тоц, 2 Т (период колебаний иe.bi). ПЭТ), Командный генератор 31 после захвата схемой fj, пере.ходит в режим вынужденных колебаНИИ, При действии частотного канала схемы обеспечивается настройка на резонансную частоту i; р ПЭТ напряжения на выходе Ugbix.mcjx этом может изменяться зависимо от величины возмущающего воздействия и флуктуирует в нексугорых пределах в связи с автоколебательным режимом работы частотного канала. Поэтому стабилизация выходного напряжения преобразователя осуществляется взаимосвязанным с частотным каналом действием амплитудного канала. Для этого на выходе узла S.5 сравнения амплитудного канала формируется сигнал ошибки, определяемый разностью между текущим и .экстремальным значением i который поступает на регулятор 2 амплитуды, Регулятор 2 амплитуды компенсирует изменения &ы)(, от заданного значения с высокой статической и динамической точностью, отрабатывая сигнал ощибки по определенному алгоритму (например, пропорционально-интегро-дифферендиальHOMyi ПИД-алгоритму), Для уменьщения ощибки слежения за значением U вых.тал при действии возмущений с управляющего триггера 24 с помощью Д11фференцирующей цепочки 27 и 28 формируются короткие импульсы сброса (ис) схем 10 и 11 запоминания (сброс на О) для стирания предьздущей информации. Под действием этих импульсов происхоДит разряд запоминающих конденсаторов 16 и 17 через ключи 18 и 19 разряда. Таким образом, преобразователь осуществляет адаптивное управление, автоматически определяя величины регулирующи.х воздействий i t и Л. ( f - входная 4acTOTajA y - входная амплитуда, соответствующих резонансной частоте ПЭТ и заданному (стабилизируемому) значению вьп одного напряжения, при изменении внешних .воздействий (возмущений), В рассмотренной схеме скорость изменения и-у , т,е, dUy(i)di Ku consl, а ее знак меняется после прохода экстремума (J aj,x соответствии с принятым законом переключения (П-законом), По условиям подавления выбросов помех и увеличения точности работы лучшим является пропорционально-интегральный ПИ-закон, который может быть сформирован, например, посредством включения формирующего устройства (линейного ильтра с конечным временем памяти) на входе управляпощего триггера 24, Улучшение точности и помахо-устойчивости может быть также достигнуто введе- , нием определенного алгоритма управления в регуляторе 1 частоты. Варианты схемы пьезопопупроводникового преобразователя с предлагаемым способом адаптивного управления могут быть различными. Например, частота автоколебаний может выступать в качестве управляющей информации для ампй тудного канала (вблизи экстремума с1к максимальная). Для этого, преобразуя в непряжение (преобразователем частота-напряжение) и фи/ксируя посредством схемы запоминания (аналогичной 11) его максимальное значение, может сигнал ошибки на аходе регулятора 2 сформировать по разности значений напряжений, соответствующих текущему значению Шд и Для увеличения помехоустойчивости преобразов.ателя схемы запоминания могут фиксировать значение тогда случайные выбросы не приведут к возможным нарушениям режима слежения за -вых.пкзиС Р отработке возмущений, следующих с достаточно высокой частотой, отличия статических АЧХ от динамичес ких АЧХ ПЭТ также могут привести к некоторому искажению нормального ре- жима работы преобразователя. В этом случае может оказаться целесообразным переход вблизи экстремума на скорость поиска, когда динамическая АЧХ мало отличается от статической АЧХ (достигается схемными путями и выб.ором режима работы интегратора, при этом может быть осуществлена реализация способа с оптимизацией по быстродействию) Использование предлагаемого способа адаптивного управления в пьезополупроводниковых преобразователях обеспечивает самонастраивающийся (адаптивный) режим автоматической стабилизации вььХОДНО1Ч) напряжения при действии сильныж возмущений, высокую точность стабилизации выходного напряжения на его экстремальном значении при автоматичес ком слеж;ении за частотой резонанса ПЭТ, высокую устойчивость слежения за экстремумом выходного напряж;ения и по мехозащищенность (интегратор сглажива помехи), а также возможность организации работы преобразователя с процессами, оптимальньпуш по быстродействию при введении переменного (оптимального закона изменения скорости поиска экстр мума (реализуется минимальное время п(даска экстремума с заданной наперед точностью). Формула изобретения 1. Способ управления в пьезопопупро водниковых преобразователях, заключающийся в измерений выходного напряжени пьезоггрансформатора, Сравнении результа та измерения с опорным снгнвцом формировании аналогового сигнала управления в зависимости от указанного сравнения и воздействия на амплитуду напряжения возбуждения пьвзотрансформатора полученным сигналом управления, о т л «гча ю щи и с я тем, что,с целью повышения точности управления путем обеспечения адаптивного управления, предварительно воздействуют на частоту напрйжения возбуждения пьезотрансформатсра поисковым сигналом, запоминают максимальное значение выходного напряжения путем сравнения выходного напряжения с опорным, формируют дискретный сигнал управления, частотой следования которого синхронизируют частоту поискового сигнала и которым воздействуют на частоту напряжения возбуждения пьезотрано1форматора наряду с указанным воздействием аналового сигнала управления на амплитуду напряжения возбуждения, 2.Способ по п. 1, о т л и ч. а ющ и и с я тем, что, в качестве опорного сигнала при формировании аналогового сигнала управления используют результат запоминания максимального значения выходного напряжения, 3,Устройство для осуществления способа по п. 1, содержащее пьезотрансформатор, одни обкладки которого служат для подключения выходной цепи, а другие соёдвнеш с выходом усилителя MotOrности, один еход которого соединен с выходом регулятора амплитуды, вход которого соединен с выходом узла сравнения, и датчик обратной связи, соединенный с выходной цепью, о т л и ч а ющ и и с я тем, что устройство снабжено псюледоватепьво соединеннь1ми компаратором, ключом, у1фввпяющим триггером и интегратором, комассщшм генератором, соединенным выходом через диффе ренцируюшую цепочку с ключом и управляющим триггером, а входом через другую дифференцирующую цепочку с выходом компаратора, а также Двумя схемг ми запоминания, одна из коггорьсс включена между выходом введениого первого повторителя и аходом уапа сравнения, а .другая - между выходом второго введенного повторителя и входом компаратора, причем входы повторителей соединены с выходом датчика обратной связи, а выход интегратора соединен со входом введенного регулятора частоты, выходом
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезополупроводниковый стабилизатор постоянного напряжения | 1980 |
|
SU926636A1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОРВПТ БФ11 тшт | 1972 |
|
SU436327A1 |
| Способ управления преобразователемНА бАзЕ пьЕзОэлЕКТРичЕСКОгО ТРАНСфОРМА-TOPA | 1979 |
|
SU799052A1 |
| Пьезополупроводниковый частотно- управляемый стабилизатор напряжения | 1978 |
|
SU764015A1 |
| Стабилизатор постоянного напряжения | 1979 |
|
SU800974A1 |
| Экстремальный регулятор | 1974 |
|
SU551606A1 |
| Экстремальный регулятор | 1974 |
|
SU507857A1 |
| Экстремальный регулятор | 1975 |
|
SU591820A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| Способ частотно-амплитудного управления напряжением в пьезополупроводниковых преобразователях | 1976 |
|
SU600640A1 |
