Изобретение относится к области обнаружения источников ионизирующих излучений и может быть использовано для радиационного контроля делящихся материалов при их несанкционированном перемещении через контрольно-пропускные пункты предприятий и транспортных узлов, а также при ведении фоновой радиационной разведки с борта движущихся транспортных средств различного типа базирования (наземного, воздушного, морского и космического). При этом контроль предлагаемым способом может осуществляться как пассивными (например, детектирование спонтанного гамма-излучения в заданной области спектра), так и активными (например, зондирование импульсным потоком излучения с фиксацией отклика системы), а также полуактивными методами (например, синхронизированное детектирование атмосферного мюона и радиационных последствий его взаимодействия с тяжелыми материалами).
Известен способ определения параметров ионизирующего воздействия на образец импульсного высокоинтенсивного излучения, в котором поглощенную дозу определяют путем интегрирования по времени воздействия мощности поглощенной дозы, которую, в свою очередь определяют по изменению напряжения на обкладках конденсатора детектора в течение импульса внешнего воздействия. Патент РФ № 2507541, МПК G01T 1/16, G01T 1/36, 20.02.2014.
Недостатком данного способа является высокая погрешность интегрирования при малом отношении «сигнал/шум». Другим недостатком можно считать неоптимальное время интегрирования, не зависящее от радиационного отклика исследуемого образца на внешнее импульсное воздействие.
Известен также способ радиационно-гигиенического контроля качества угля, в котором осуществляют измерение проникающего излучения каждой емкости с углем радиометрической контрольной станцией, причем решение о превышении порога принимается по сумме импульсов по каждой емкости. Патент РФ № 2498348, МПК G01T 1/16, 10.11.2013. Преимущество данного способа перед упомянутым выше состоит в возможности обработки малого количества импульсов путем более детального учета информации, содержащейся в экспериментальной выборке (пуассоновской последовательности импульсов).
Недостаток состоит в привязке к фиксированному значению интенсивности фонового потока, а также в высокой погрешности при отслеживании резких, но коротких по времени изменений суммарной (сигнал в шуме) интенсивности потока импульсов.
Последний недостаток устранен в способе радиационного контроля перемещающихся объектов путем коррелирования во времени измерений от нескольких приемников гамма-квантов, что позволяет уменьшить вероятность пропуска радиоактивных материалов в ряде сценариев их перемещения через контрольный пункт. Патент РФ № 2384865, МПК G01T1/16, 20.03.2010. В других сценариях (ускоренное передвижение контролируемого объекта, бросок контейнера с радиоактивным материалом через зону контроля, предварительное нахождение материалов на границе этой зоны для искусственного завышения интенсивности шума) фиксация факта наличия сигнала в шуме по-прежнему осложнена. Выбор решения в этих случаях предоставляется оператору, что обуславливает влияние на результат «человеческого фактора» и вряд ли выполнимо при массовом тиражировании детекторов излучения в большой сети контроля за перемещением опасных материалов.
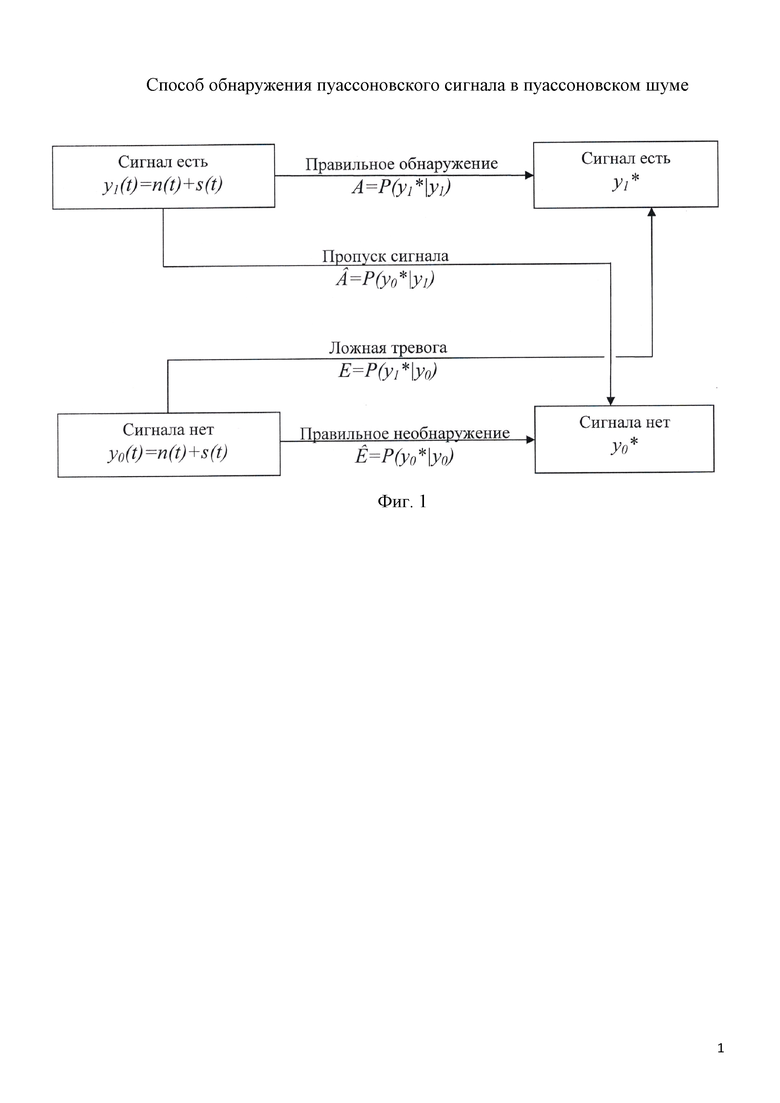
Качественные показатели и условные вероятности обнаружения и пропуска сигнала в рассмотренных выше задачах схематически представлены на фиг. 1. Пусть на входе приемника имеется шум n(t), в котором может быть сигнал s(t). Шум по отношению к сигналу аддитивен. Необходимо по результирующему входному воздействию y(t) определить, есть ли сигнал, или его нет. Задача известна (см., например, Винницкий А.С. Автономные радиосистемы. – М.: Радио и связь, 1986), в ней возможны четыре принципиально различные ситуации: правильное обнаружение и необнаружение, пропуск сигнала и ложная тревога с условными вероятностями A, Ê, Â и E соответственно. Перечисленные условные вероятности образуют полные группы событий (A+Â=1 и E+Ê=1). Это позволяет ограничиться определением только двух из них: правильного обнаружения A и ложной тревоги E, которые должны удовлетворять эксплуатационным требованиям, A ≥ AДОП и E ≤ EДОП, где AДОП и EДОП, – предельно допустимые значения A и E. Если всякий раз, независимо от результата измерений, считать, что сигнал есть, получим A=1, но E=MAX, а при обратном выводе E=0, но A=MIN. Поэтому требования снижения E и повышения A противоречат друг другу, в связи с чем появляется возможность оптимизации к требованиям конкретной задачи устройства выбора решения, являющегося существенным узлом всей системы обнаружения.
В случаях, когда вероятность появления сигнала заранее неизвестна, для сравнения эффективности различных обнаружителей используют критерий Неймана-Пирсона (Neyman J., Pearson E. On the Problem of the Most Efficient Tests of Statistical Hypotheses // Phil.Trans.Roy.Soc. V231A, №3, 1933). При одной и той же входной последовательности импульсов предпочтительнее то устройство, которое при одинаковой вероятности ложной тревоги E дает большую вероятность правильного обнаружения A. Данный критерий особенно успешно применяют в случаях, когда фоновое излучение преобладает над сигналом (см, например, Котельников В.А. Сигналы с максимальной и минимальной вероятностями обнаружения // Радиотехника и электроника. №3, 1959).
Прототипом предлагаемого изобретения выбран традиционный способ мониторинга перемещающихся объектов на предмет обнаружения делящихся ядерных материалов, включающий задание требуемого уровня вероятностей ложных тревог (Pзлт), измерение фонового счета нейтронов и вычисление среднего за установленное время экспозиции указанного счета нейтронов (m), вычисление порога срабатывания устройства тревоги (C), измерение счета нейтронов за указанное время экспозиции при наличии объекта в зоне контроля (m1), сравнение m1 с C и объявление тревоги в случае m1 > C, отличающийся тем, что производят вычисление порога C в соответствии с формулой 
k – количество стандартных отклонений от среднего для нормального (Гаусса) распределения, соответствующее требуемой Pзлт;
a, b и d – коэффициенты, значение которых выбирают из областей
-0,40 ≤ a ≤ 0,32;
0,20 ≤ b ≤ 0,22;
0,20 ≤ d ≤ 0,35;
при аппроксимации табличных данных распределения Пуассона, минимизируя отклонение расчетного значения вероятности ложных тревог от Pзлт для различных интервалов значений m, а порог устанавливают в соответствии с правилами: если дробная часть C меньше d, то C округляется до меньшего целого; если указанная дробная часть C больше 1 - d, то C округляется до большего целого, в остальных случаях порог чередуется между меньшим и большим целыми значениями после каждого измерения m1 и сравнения его с установленным порогом C. Патент РФ № 2150127, МПК G01T 1/00, 27.05.2000.
Недостаток прототипа состоит в малой вероятности правильного обнаружения сигнала в шуме в сценариях радиационного мониторинга, связанных с быстрым перемещением делящихся материалов при малом отношении «сигнал/шум». Под правильным обнаружением понимается ситуация, когда решение «сигнал есть» принимается в случае, когда сигнал действительно присутствует в шуме. Альтернативы этой ситуации представлены на фиг. 1.
Техническим результатом изобретения является повышение вероятности правильного обнаружения сигнала в шуме в сценариях радиационного мониторинга, связанных с быстрым перемещением делящихся материалов при малом отношении «сигнал/шум». Критерием служит сравнение вероятностей правильного обнаружения прототипа и предлагаемого устройства при фиксированной для обоих обнаружителей вероятности ложной тревоги (критерий Неймана-Пирсона, см. выше).
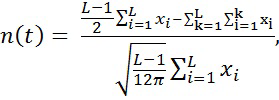
Технический результат достигается тем, что используют трендовскую критериальную функцию
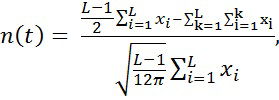
где xi – количество импульсов, которые поступают от детектора в i-м измерении, причем xi суммируют по полному количеству измерений L, а также по промежуточному количеству измерений k для проверки гипотезы о тренде (изменении во времени) интенсивности пуассоновского потока, обусловленном появлением сигнала в шуме, причем эту критериальную функцию сравнивают с пороговым значением, которую устанавливают в соответствии с квантилем нормального распределения при заранее заданной вероятности ложной тревоги.
Сущность изобретения поясняется следующим.
Запишем известное определение пуассоновского потока (см., например, Кокс Д., Льюис П. Статистический анализ последовательности событий. –М.: Мир. 1969). Пусть λ – постоянная, имеющая размерность, обратную времени. Обозначим через Nt,t+h случайную величину, определяемую как число событий, происходящих в интервале времени (t, t+h), где h>0. Данный поток событий есть пуассоновский процесс интенсивности λ, если выполняются следующие условия:

где oi(h) – функции, удовлетворяющие условию 
Сохраним определение (1), но пусть параметр λ будет функцией времени λ(t). Существенно, что по прежнему требуется независимость наступления событий в различные периоды времени.
Появление пуассоновского сигнала в пуассоновском шуме в силу аддитивности распределений эквивалентно тренду (изменению по времени) интенсивности потока событий. Поэтому обнаружителем может служить устройство, проверяющее, действительно ли имеет место изменение интенсивности.
Обратимся к нестационарному пуассоновскому процессу, для которого интенсивность наступления событий равна

Использование зависимости специального вида не нарушает общности рассмотрения, т.к. ниже проверяется гипотеза β=0. Выбор формулы (2) определяется, в первую очередь, тем, что линейная зависимость λ(t)=γ+δt, которая вблизи δ=0 была бы эквивалентна (2), неотрицательна лишь для ограниченных значений параметров γ, δ и t.
Согласно определению (1), вероятность того, что следующее за моментом ti событие произойдет в интервале (ti+1, ti+1+Δt), может быть оценена как

Тогда для последовательности событий в интервале (0,T) при условии, что события происходят в моменты времени t1,t2,…,tN, оптимизируемый параметр – условную вероятность правильного обнаружения – с точностью до нормировочного коэффициента можно выразить как произведение
 (4)
(4)
Для выбранной зависимости (2) формула (4) переходит в

Поскольку в формуле (5) результат измерений входит в виде двух переменных: N и  , эти два числа являются достаточными статистиками для оценки правдоподобия гипотезы о наличии сигнала в шуме. Далее, при фиксированном β достаточной статистикой для α является само число N. Следовательно, по условному распределению суммы можно судить о параметре β.
, эти два числа являются достаточными статистиками для оценки правдоподобия гипотезы о наличии сигнала в шуме. Далее, при фиксированном β достаточной статистикой для α является само число N. Следовательно, по условному распределению суммы можно судить о параметре β.
Данное условное распределение (см., например, Хелстром К. Статистическая теория обнаружения сигналов. – М.: ИЛ. 1963) является частным от деления выражения (5) на безусловную вероятность наступления событий, которая есть соответствующий член пуассоновского распределения со средним

Таким образом, плотность распределения наблюдений при условии, что произошло N событий, имеет вид
 (7)
(7)
где множество допустимых значений параметра ti должно удовлетворять условию 0 ≤ t1 ≤ t2 ≤…≤ tN ≤ T.
Выражение (7) представляет собой плотность распределения упорядоченной выборки N значений с усеченным показательным распределением, т.е. N случайных величин с плотностью распределения

где 0 ≤ t ≤ T и β≠0. Следовательно, для всех β условная плотность распределения суммы совпадает с распределением суммы независимых величин с плотностью (8). Если β=0, это распределение переходит в равномерное на интервале (0,T).
Логарифмическая функция правдоподобия (см., например, R.Fisher. On the mathematical foundations of theoretical statistics. Phil.Tran., A, 222, 1922) с точностью до константы в нашем случае равна логарифму выражения (7):

так что ее первая производная по β дает

а информационная функция (математическое ожидание взятой с обратным знаком второй производной) имеет вид

Таким образом, для проверки гипотезы стационарности пуассоновского потока импульсов в задаче контроля перемещающихся источников ионизирующих излучений достаточно проверить, действительно ли по стандартному нормальному закону распределена величина

где t1,t2,…tN ≤ T – времена регистрации каждого из N импульсов за время наблюдения T.
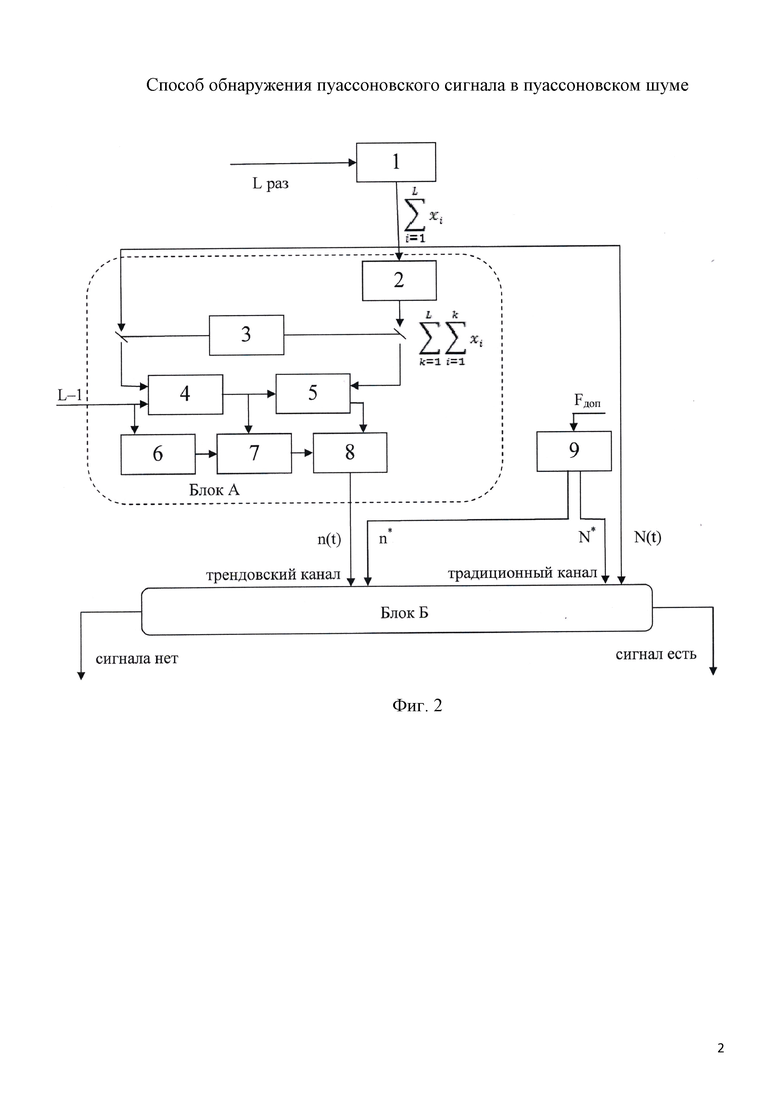
На фиг. 2 представлена блок-схема устройства, реализующего патентуемый способ. Принятые обозначения:
1 – первый сумматор,
2 – второй сумматор,
3 – логический ключ,
4 – схема умножения,
5 – схема вычитания,
6 – схема извлечения квадратного корня,
7 – первая схема деления,
8 – вторая схема деления,
9 – квантильное устройство.
Блок А объединяет арифметические устройства вычисления трендовской функции:
где xi – количество импульсов в i-м измерении, суммируемое по полному количеству измерений L, а также по промежуточному количеству измерений k для проверки гипотезы о тренде (изменении во времени) интенсивности пуассоновского потока, обусловленном появлением сигнала в шуме.
Блок Б принятия решения (имеется у прототипа) сравнивает значение, вычисленное блоком А по трендовской критериальной функции, с пороговым значением, устанавливаемым в соответствии с квантилем нормального распределения при заранее заданной вероятности ложной тревоги.
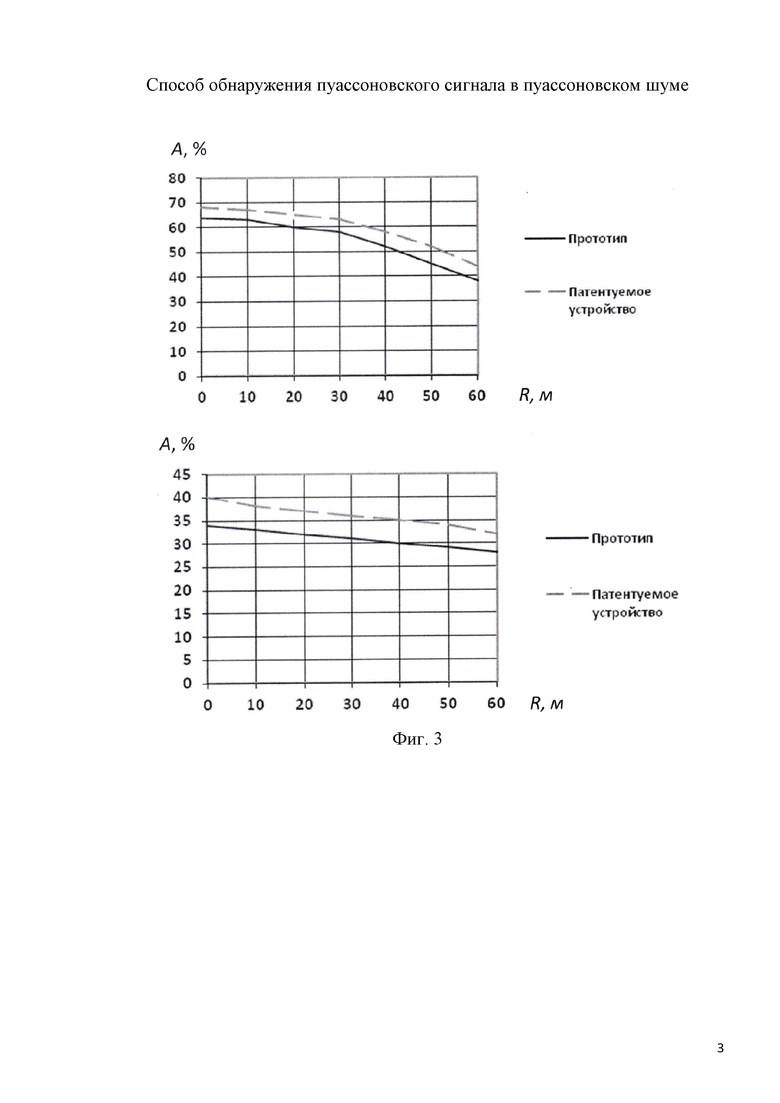
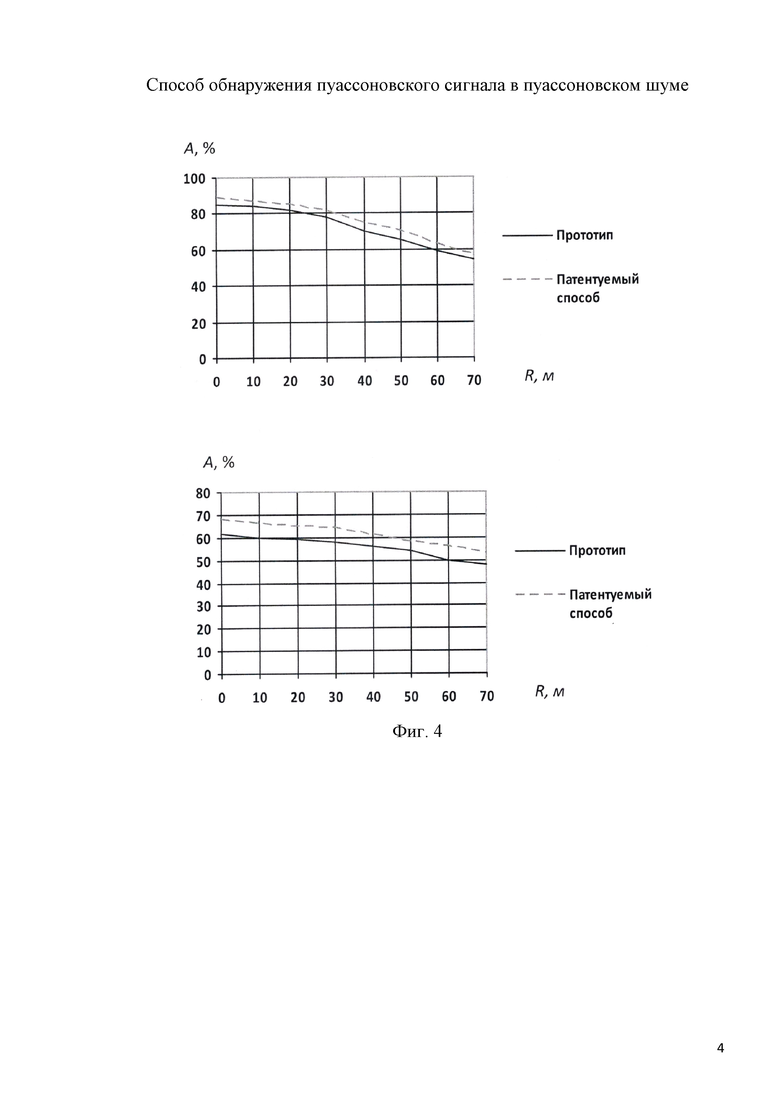
Экспериментальные результаты работы этого устройства представлены на фиг. 3, 4. На обоих чертежах представлены зависимости вероятности правильного обнаружения A от минимального расстояния «источник-детектор» R при скорости движения источника 3,5 м/с (верхний рисунок) и 5,0 м/с (нижний рисунок). Отличаются чертежи тем, что на фиг. 3 заданная вероятность ложной тревоги составляет 5%, а на фиг. 4 – 20%. Соответственно, меняется дальность обнаружения источника ионизирующих излучений, но патентуемое устройство (пунктир) на всех чертежах при одинаковых дальностях обеспечивает бóльшую вероятность правильного обнаружения (сигнал принят за сигнал). Это верно для скоростей более 3 м/с. Аналогичные результаты для меньших скоростей показали, что от 0 до 2 м/с эффективнее прототип, а в диапазоне 2–3 м/с оба метода обнаружения в пределах погрешности измерений дают одинаковую вероятность правильного обнаружения.
Таким образом, достигается заявленный технический результат, а именно, повышается вероятность правильного обнаружения сигнала в шуме в сценариях радиационного мониторинга, связанных с быстрым перемещением делящихся материалов при малом отношении «сигнал/шум».
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения пуассоновского сигнала в пуассоновском шуме | 2018 |
|
RU2697713C1 |
| Способ поиска и обнаружения источников ионизирующих излучений с анализом времени регистрации частиц | 2025 |
|
RU2840106C1 |
| Способ обнаружения источников ионизирующих излучений стационарными системами радиационного контроля | 2024 |
|
RU2833347C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2003 |
|
RU2242024C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2011 |
|
RU2456638C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2022 |
|
RU2785525C1 |
| СПОСОБ МОНИТОРИРОВАНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ НА ПРЕДМЕТ ОБНАРУЖЕНИЯ ДЕЛЯЩИХСЯ ЯДЕРНЫХ МАТЕРИАЛОВ | 1999 |
|
RU2150127C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СЛАБЫХ ПОТОКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 1998 |
|
RU2140660C1 |
| Способ скорейшего обнаружения момента возникновения перегрузки пуассоновского IP телетрафика | 2019 |
|
RU2728948C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ СЛАБЫХ ПОТОКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2006 |
|
RU2293999C1 |
Изобретение относится к области обнаружения источников ионизирующих излучений и может быть использовано для радиационного контроля делящихся материалов при их несанкционированном перемещении. Сущность изобретения заключается в том, что способ обнаружения пуассоновского сигнала в пуассоновском шуме включает задание требуемого уровня вероятностей ложных тревог, измерение фонового счета частиц и вычисление среднего за установленное время экспозиции указанного счета частиц, вычисление порога срабатывания устройства тревоги, измерение счета частиц за указанное время экспозиции при наличии объекта в зоне контроля, сравнение этого изменения с порогом и объявление тревоги в случае превышения порога, при этом вычисляют наличие пуассоновского сигнала в пуассоновском шуме с помощью трендовской критериальной функции. 4 ил.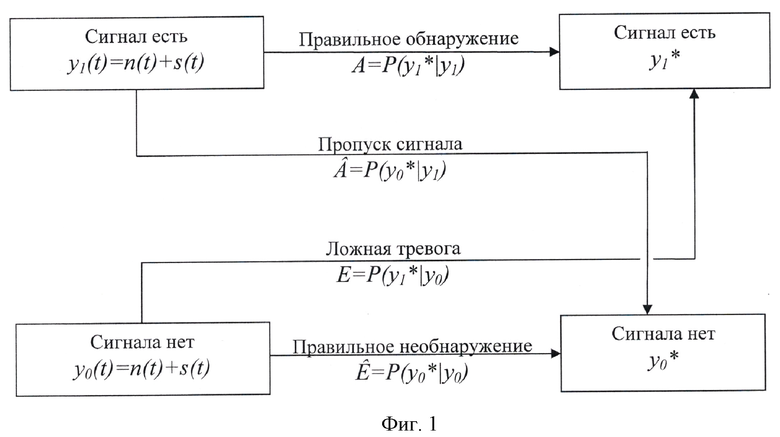
1. Способ обнаружения пуассоновского сигнала в пуассоновском шуме, включающий задание требуемого уровня вероятностей ложных тревог, измерение фонового счета частиц и вычисление среднего за установленное время экспозиции указанного счета частиц, вычисление порога срабатывания устройства тревоги, измерение счета частиц за указанное время экспозиции при наличии объекта в зоне контроля, сравнение этого изменения с порогом и объявление тревоги в случае превышения порога, отличающийся тем, что вычисляют наличие пуассоновского сигнала в пуассоновском шуме с помощью трендовской критериальной функции
где xi – количество импульсов, которые поступают от детектора в i-м измерении, причем xi суммируют по полному количеству измерений L, а также по промежуточному количеству измерений k, затем значение, вычисленное по трендовской критериальной функции, сравнивают с пороговым значением, которую устанавливают в соответствии с квантилем нормального распределения при заранее заданной вероятности ложной тревоги.
| СПОСОБ МОНИТОРИРОВАНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ НА ПРЕДМЕТ ОБНАРУЖЕНИЯ ДЕЛЯЩИХСЯ ЯДЕРНЫХ МАТЕРИАЛОВ | 1999 |
|
RU2150127C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2011 |
|
RU2456638C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ИСТОЧНИКА ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ В ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 1998 |
|
RU2142644C1 |
| WO 9832032 A1, 23.07.1998. | |||

