ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[001] Настоящее изобретение относится к балансирующим транспортным средствам с человекомашинным взаимодействием и, более конкретно, к транспортному средству с человекомашинным взаимодействием, работающему в зависимости от положения тела пользователя.
Предпосылки создания изобретения
[002] Транспортные средства с человекомашинным взаимодействием, работающие в зависимости от положения тела пользователя, которые также называются электрическими балансирующими транспортными средствами или транспортными средствами с управлением от датчиков, обычно работают по основному принципу «динамической стабилизации». В корпусе транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, гироскоп может взаимодействовать с акселерометром для определения изменения углового положения корпуса транспортного средства, причем система сервоуправления может точно управлять корпусом транспортного средства для регулировки его положения, тем самым осуществляя балансирование транспортного средства.
[003] Транспортные средства с человекомашинным взаимодействием, работающие в зависимости от положения тела пользователя, обычно делятся на две категории: с рулем и без руля. В частности, транспортным средством с человекомашинным взаимодействием, работающим в зависимости от положения тела пользователя, с рулем можно управлять для перемещения вперед, назад и выполнения поворотов за счет управления рулем. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, без руля выполнено с возможностью перемещения вперед и назад за счет наклона корпуса транспортного средства и выполнения поворотов за счет поворота двух педалей ступнями пользователя. Одним примером транспортного средства с человекомашинным взаимодействием, работающим в зависимости от положения тела пользователя, без руля может быть двухколесное балансирующее транспортное средство, описанное в заявке на патент Китая №CN201320300947. Двухколесное балансирующее транспортное средство содержит внутреннюю накладку, причем внутренняя накладка состоит из левой внутренней накладки и правой внутренней накладки, расположенных симметрично друг относительно друга. Левая внутренняя накладка соединена с возможностью поворота с правой внутренней накладкой.
[004] Однако внутренняя накладка двухколесного балансирующего транспортного средства, используемая в качестве несущей рамы, состоит из левой внутренней накладки и правой внутренней накладки. Такая конструкция слишком усложнена.
Сущность изобретения
[005] Для решения вышеупомянутой задачи предлагается транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, простой конструкции.
[006] Описывается транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Первый датчик положения выполнен с возможностью определения информации о наклоне двух педалей относительно несущей рамы. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о наклоне.
[007] Предпочтительно два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали.
[008] Предпочтительно несущая рама представляет собой жесткую пластинчатую конструкцию.
[009] Предпочтительно участок под педаль представляет собой приемное углубление, утопленное внутрь несущей рамы, причем с каждой стороны педали расположен выступ, обращенный к колесам, причем педаль поворачивается относительно корпуса транспортного средства посредством выступа.
[010] Предпочтительно корпус транспортного средства содержит множество пружинных опор, расположенных между педалью и нижней частью приемного углубления.
[011] Предпочтительно индуктивный переключатель расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[012] Предпочтительно индуктивный переключатель содержит по меньшей мере одно из датчика давления и фотоэлектрического датчика, оба из которых выполнены с возможностью определения того, нажата педаль или нет.
[013] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о наклоне, определенной первым датчиком положения, для приведения колес во вращение.
[014] Предпочтительно первый датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
[015] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
[016] Предпочтительно несущая рама закрыта сверху педалью.
[017] Предпочтительно несущая рама представляет собой жесткий вал, причем противоположные концы несущей рамы соединены с возможностью поворота с двумя колесами.
[018] Предпочтительно первый датчик положения расположен между педалью и несущей рамой и выполнен с возможностью определения угла поворота педали относительно несущей рамы.
[019] Предпочтительно два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы и соединены с возможностью вращения с несущей рамой.
[020] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[021] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Первый датчик положения выполнен с возможностью определения информации о положении пользователя, стоящего на педали. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о положении.
[022] Предпочтительно корпус транспортного средства дополнительно содержит по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой, причем первый датчик положения выполнен с возможностью определения степеней деформации пружинных опор для определения информации о положении пользователя, стоящего на педали.
[023] Предпочтительно первый датчик положения выполнен с возможностью определения показателя деформации пружинных опор на основании уравновешенного положения пружинных опор для определения деформации пружинных опор.
[024] Предпочтительно педаль соединена с возможностью поворота с несущей рамой на оси колес, и первый датчик положения выполнен с возможностью определения информации о повороте педали в направлении, параллельном оси колес.
[025] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно земли, причем контроллер выполнен с возможностью приведения колес в движение вперед или назад на основании информации о наклоне, определенной вторым датчиком положения, и контроллер выполнен с возможностью приведения колес в движение для выполнения поворотов на основании информации о повороте, определенной первым датчиком положения.
[026] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[027] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Первый датчик положения выполнен с возможностью определения информации о наклоне двух педалей относительно несущей рамы. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о наклоне. Выдвижной кожух расположен на несущей раме.
[028] Предпочтительно выдвижной кожух содержит первый кожух и второй кожух, причем первый кожух и второй кожух выполнены с возможностью выдвижения в направлении, перпендикулярном оси колес, причем выдвижной кожух содержит две торцевые части, обращенные к колесам, боковую часть, используемую для соединения двух торцевых частей, верхнюю часть, обращенную от земли, и нижнюю часть, обращенную к верхней части, причем углубление расположено на верхней части и выполнено с возможностью размещения в нем педали.
[029] Предпочтительно первый кожух и второй кожух выполнены с возможностью выдвижения вперед или назад параллельно земле.
[030] Предпочтительно первый кожух и второй кожух симметричны друг относительно друга.
[031] Предпочтительно два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали и углубление соответствует участку под педаль.
[032] Предпочтительно несущая рама представляет собой жесткую пластинчатую конструкцию.
[033] Предпочтительно участок под педаль представляет собой приемное углубление, утопленное внутрь несущей рамы, причем с каждой стороны педали расположен выступ, обращенный к колесам, причем педаль поворачивается относительно корпуса транспортного средства посредством выступа.
[034] Предпочтительно корпус транспортного средства содержит множество пружинных опор, расположенных между педалью и нижней частью приемного углубления.
[035] Предпочтительно индуктивный переключатель расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[036] Предпочтительно индуктивный переключатель расположен на педали, под педалью, внутри педали или в углублении.
[037] Предпочтительно индуктивный переключатель содержит по меньшей мере одно из датчика давления и фотоэлектрического датчика, оба из которых выполнены с возможностью определения того, нажата педаль или нет.
[038] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о наклоне, определенной первым датчиком положения, для приведения колес во вращение.
[039] Предпочтительно исполнительное устройство расположено внутри несущей рамы или внутри колес.
[040] Предпочтительно первый датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
[041] Предпочтительно первый датчик положения встроен во вспомогательную печатную плату, причем вспомогательная печатная плата прикреплена к педали и поворачивается с педалью.
[042] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
[043] Предпочтительно несущая рама закрыта сверху педалью.
[044] Предпочтительно несущая рама представляет собой жесткий вал, причем противоположные концы несущей рамы соединены с возможностью поворота с двумя колесами.
[045] Предпочтительно первый датчик положения расположен между педалью и несущей рамой и выполнен с возможностью определения угла поворота педали относительно несущей рамы.
[046] Предпочтительно два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы и соединены с возможностью вращения с несущей рамой.
[047] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[048] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Первый датчик положения выполнен с возможностью определения информации о положении пользователя, стоящего на педали. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о положении, причем выдвижной кожух расположен на несущей раме.
[049] Предпочтительно корпус транспортного средства дополнительно содержит по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой, причем первый датчик положения выполнен с возможностью определения степеней деформации пружинных опор для определения информации о положении пользователя, стоящего на педали, причем углубление расположено на выдвижном кожухе и выполнено с возможностью размещения в нем педали.
[050] Предпочтительно выдвижной кожух содержит первый кожух и второй кожух, причем первый кожух и второй кожух выполнены с возможностью выдвижения в направлении, перпендикулярном оси колес, причем выдвижной кожух содержит две торцевые части, обращенные к колесам, боковую часть, используемую для соединения двух торцевых частей, верхнюю часть, обращенную от земли, и нижнюю часть, обращенную к верхней части, причем углубление расположено на верхней части и выполнено с возможностью размещения в нем педали.
[051] Предпочтительно первый кожух и второй кожух выполнены с возможностью выдвижения вперед или назад параллельно земле.
[052] Предпочтительно первый кожух и второй кожух симметричны друг относительно друга.
[053] Предпочтительно первый датчик положения выполнен с возможностью определения степеней деформации пружинных опор на основании уравновешенного положения пружинных опор для определения деформации пружинных опор.
[054] Предпочтительно педаль соединена с возможностью поворота с несущей рамой на оси колес, и первый датчик положения выполнен с возможностью определения информации о повороте педали в направлении, параллельном оси колес.
[055] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно земли, причем контроллер выполнен с возможностью приведения колес в движение вперед или назад на основании информации о наклоне, определенной вторым датчиком положения, и контроллер выполнен с возможностью приведения колес в движение для выполнения поворотов на основании информации о повороте, определенной первым датчиком положения.
[056] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[057] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, по меньшей мере одну педаль, первый датчик положения и контроллер. Педаль расположена на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Педаль представляет собой емкостное устройство или индуктивное устройство. Первый датчик положения выполнен с возможностью определения информации о нажатии педали. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о нажатии.
[058] Предпочтительно корпус транспортного средства содержит две педали.
[059] Предпочтительно два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали.
[060] Предпочтительно несущая рама представляет собой жесткую пластинчатую конструкцию.
[061] Предпочтительно участок под педаль представляет собой приемное углубление, утопленное внутрь несущей рамы, причем корпус транспортного средства содержит множество пружинных опор, расположенных между педалью и нижней частью приемного углубления.
[062] Предпочтительно индуктивный переключатель расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[063] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о наклоне, определенной первым датчиком положения, для приведения колес во вращение.
[064] Предпочтительно исполнительное устройство расположено внутри несущей рамы или внутри колес.
[065] Предпочтительно первый датчик положения расположен на вспомогательной печатной плате, причем вспомогательная печатная плата прикреплена к педали.
[066] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
[067] Предпочтительно второй датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
[068] Предпочтительно несущая рама закрыта сверху педалью.
[069] Предпочтительно несущая рама представляет собой жесткий вал, причем противоположные концы несущей рамы соединены с возможностью поворота с двумя колесами.
[070] Предпочтительно первый датчик положения расположен между педалью и несущей рамой и выполнен с возможностью определения информации о нажатии педали.
[071] Предпочтительно два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы и соединены с возможностью вращения с несущей рамой.
[072] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[073] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства содержит несущую раму, по меньшей мере одну педаль, первый датчик положения и контроллер. Педаль расположена на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Педаль представляет собой емкостное устройство или индуктивное устройство. Первый датчик положения выполнен с возможностью определения информации о нажатии педали. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о нажатии.
[074] Предпочтительно корпус транспортного средства содержит две педали.
[075] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес, причем контроллер выполнен с возможностью приведения колес в движение вперед или назад на основании определенной информации о наклоне, причем контроллер выполнен с возможностью приведения колес в движение для выполнения поворотов на основании определенной информации о положении.
[076] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[077] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Множество пружинных опор расположены на педали и выполнены с возможностью возврата педали в исходное положение или ее амортизации. Первый датчик положения выполнен с возможностью определения информации о наклоне двух педалей относительно несущей рамы. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о наклоне.
[078] Предпочтительно два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали.
[079] Предпочтительно несущая рама представляет собой жесткую пластинчатую конструкцию.
[080] Предпочтительно участок под педаль представляет собой приемное углубление, утопленное внутрь несущей рамы, причем с каждой стороны педали расположен выступ, обращенный к колесам, причем педаль поворачивается относительно корпуса транспортного средства посредством выступа.
[081] Предпочтительно множество пружинных опор расположено между педалью и нижней частью приемного углубления.
[082] Предпочтительно множество пружинных опор представляют собой по меньшей мере одно из пружины, датчика давления, упругой гибкой конструкции или торсионной пружины.
[083] Предпочтительно первый датчик положения расположен внутри датчика давления или упругой гибкой конструкции.
[084] Предпочтительно индуктивный переключатель расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[085] Предпочтительно индуктивный переключатель расположен на педали, под педалью, внутри педали или в углублении.
[086] Предпочтительно индуктивный переключатель содержит по меньшей мере одно из датчика давления и фотоэлектрического датчика, оба из которых выполнены с возможностью определения того, нажата педаль или нет.
[087] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о наклоне, определенной первым датчиком положения, для приведения колес во вращение.
[088] Предпочтительно исполнительное устройство расположено внутри несущей рамы или внутри колес.
[089] Предпочтительно первый датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
[090] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
[091] Предпочтительно первый датчик положения расположен на вспомогательной печатной плате, причем вспомогательная печатная плата прикреплена к педали и перемещается с педалью.
[092] Предпочтительно несущая рама закрыта сверху педалью.
[093] Предпочтительно несущая рама представляет собой жесткий вал, причем противоположные концы несущей рамы соединены с возможностью поворота с двумя колесами.
[094] Предпочтительно первый датчик положения расположен между педалью и несущей рамой и выполнен с возможностью определения информации о нажатии педали.
[095] Предпочтительно два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы и соединены с возможностью вращения с несущей рамой.
[096] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[097] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Множество пружинных опор расположено на педали. Первый датчик положения выполнен с возможностью определения информации о положении пользователя, стоящего на педали. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о положении.
[098] Предпочтительно множество пружинных опор представляют собой по меньшей мере одно из пружины, датчика давления или торсионной пружины.
[099] Предпочтительно первый датчик положения расположен внутри датчика давления.
[0100] Предпочтительно корпус транспортного средства дополнительно содержит по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой, причем первый датчик положения выполнен с возможностью определения степеней деформации пружинных опор для определения информации о положении пользователя, стоящего на педали.
[0101] Предпочтительно первый датчик положения выполнен с возможностью определения показателя деформации пружинных опор на основании уравновешенного положения пружинных опор для определения деформации пружинных опор.
[0102] Предпочтительно педаль соединена с возможностью поворота с несущей рамой на оси колес, и первый датчик положения выполнен с возможностью определения информации о повороте педали в направлении, параллельном оси колес.
[0103] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно земли, причем контроллер выполнен с возможностью приведения колес в движение вперед или назад на основании информации о наклоне, определенной вторым датчиком положения, и контроллер выполнен с возможностью приведения колес в движение для выполнения поворотов на основании информации о повороте, определенной первым датчиком положения.
[0104] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[0105] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Первый датчик положения выполнен с возможностью определения информации о наклоне двух педалей относительно несущей рамы. Приемный участок предусмотрен внутри несущей рамы и выполнен с возможностью размещения в нем контроллера. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о наклоне.
[0106] Предпочтительно два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали.
[0107] Предпочтительно контроллер встроен в основную печатную плату.
[0108] Предпочтительно несущая рама представляет собой жесткую пластинчатую конструкцию.
[0109] Предпочтительно участок под педаль представляет собой приемное углубление, утопленное внутрь несущей рамы, причем с каждой стороны педали расположен выступ, обращенный к колесам, причем педаль поворачивается относительно корпуса транспортного средства посредством выступа.
[0110] Предпочтительно корпус транспортного средства содержит множество пружинных опор, расположенных между педалью и нижней частью приемного углубления.
[0111] Предпочтительно индуктивный переключатель расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[0112] Предпочтительно индуктивный переключатель расположен на педали, под педалью, внутри педали или в углублении.
[0113] Предпочтительно индуктивный переключатель содержит по меньшей мере одно из датчика давления и фотоэлектрического датчика, оба из которых выполнены с возможностью определения того, нажата педаль или нет.
[0114] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о наклоне, определенной первым датчиком положения, для приведения колес во вращение.
[0115] Предпочтительно исполнительное устройство расположено внутри несущей рамы или внутри колес.
[0116] Предпочтительно источник питания расположен в приемном участке, причем разделитель расположен в приемном участке и выполнен с возможностью отделения источника питания от контроллера.
[0117] Предпочтительно первый датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
[0118] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
[0119] Предпочтительно первый датчик положения встроен во вспомогательную печатную плату, причем вспомогательная печатная плата прикреплена к педали и поворачивается с педалью.
[0120] Предпочтительно несущая рама закрыта сверху педалью.
[0121] Предпочтительно два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы и соединены с возможностью вращения с несущей рамой.
[0122] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[0123] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Первый датчик положения выполнен с возможностью определения информации о положении пользователя, стоящего на педали. Приемный участок предусмотрен внутри несущей рамы и выполнен с возможностью размещения в нем контроллера. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о положении.
[0124] Предпочтительно корпус транспортного средства дополнительно содержит по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой, причем первый датчик положения выполнен с возможностью определения степеней деформации пружинных опор для определения информации о положении пользователя, стоящего на педали.
[0125] Предпочтительно первый датчик положения выполнен с возможностью определения показателя деформации пружинных опор на основании уравновешенного положения пружинных опор для определения деформации пружинных опор.
[0126] Предпочтительно педаль соединена с возможностью поворота с несущей рамой на оси колес, и первый датчик положения выполнен с возможностью определения информации о повороте педали в направлении, параллельном оси колес.
[0127] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно земли, причем контроллер выполнен с возможностью приведения колес в движение вперед или назад на основании информации о наклоне, определенной вторым датчиком положения, и контроллер выполнен с возможностью приведения колес в движение для выполнения поворотов на основании информации о повороте, определенной первым датчиком положения.
[0128] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[0129] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Первый датчик положения выполнен с возможностью определения информации о наклоне двух педалей относительно несущей рамы. Приемный участок предусмотрен внутри несущей рамы и выполнен с возможностью размещения в нем контроллера. Накладка расположена над приемным участком. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о наклоне.
[0130] Предпочтительно накладка расположена на жесткой пластинчатой конструкции несущей рамы.
[0131] Предпочтительно два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали, причем приемный участок и накладка расположены между двумя участками под педали.
[0132] Предпочтительно контроллер встроен в основную печатную плату.
[0133] Предпочтительно выдвижной кожух расположен за пределами несущей рамы и накладки.
[0134] Предпочтительно несущая рама представляет собой жесткую пластинчатую конструкцию.
[0135] Предпочтительно участок под педаль и приемный участок представляют собой приемное углубление, утопленное внутрь несущей рамы, причем с каждой стороны педали расположен выступ, обращенный к колесам, причем педаль поворачивается относительно корпуса транспортного средства посредством выступа.
[0136] Предпочтительно множество пружинных опор расположено между педалью и нижней частью приемного углубления.
[0137] Предпочтительно индуктивный переключатель расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[0138] Предпочтительно индуктивный переключатель расположен на педали, под педалью, внутри педали или в углублении.
[0139] Предпочтительно индуктивный переключатель содержит по меньшей мере одно из датчика давления и фотоэлектрического датчика, оба из которых выполнены с возможностью определения того, нажата педаль или нет.
[0140] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о наклоне, определенной первым датчиком положения, для приведения колес во вращение.
[0141] Предпочтительно исполнительное устройство расположено внутри несущей рамы или внутри колес.
[0142] Предпочтительно источник питания расположен в приемном участке, накладка расположена сверху источника питания и контроллера, причем разделитель расположен в приемном участке и выполнен с возможностью отделения источника питания от контроллера.
[0143] Предпочтительно первый датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
[0144] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
[0145] Предпочтительно первый датчик положения встроен во вспомогательную печатную плату, причем вспомогательная печатная плата прикреплена к педали и поворачивается с педалью.
[0146] Предпочтительно несущая рама закрыта сверху педалью.
[0147] Предпочтительно два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы и соединены с возможностью вращения с несущей рамой.
[0148] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[0149] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Первый датчик положения выполнен с возможностью определения информации о положении пользователя, стоящего на педали. Приемный участок предусмотрен внутри несущей рамы и выполнен с возможностью размещения в нем контроллера. Накладка расположена над приемным участком. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о положении.
[0150] Предпочтительно накладка расположена на жесткой пластинчатой конструкции несущей рамы.
[0151] Предпочтительно выдвижной кожух расположен за пределами несущей рамы и накладки.
[0152] Предпочтительно корпус транспортного средства дополнительно содержит по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой, причем первый датчик положения выполнен с возможностью определения степеней деформации пружинных опор для определения информации о положении пользователя, стоящего на педали.
[0153] Предпочтительно первый датчик положения выполнен с возможностью определения показателя деформации пружинных опор на основании уравновешенного положения пружинных опор для определения деформации пружинных опор.
[0154] Предпочтительно педаль соединена с возможностью поворота с несущей рамой на оси колес, и первый датчик положения выполнен с возможностью определения информации о повороте педали в направлении, параллельном оси колес.
[0155] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно земли, причем контроллер выполнен с возможностью приведения колес в движение вперед или назад на основании информации о наклоне, определенной вторым датчиком положения, и контроллер выполнен с возможностью приведения колес в движение для выполнения поворотов на основании информации о повороте, определенной первым датчиком положения.
[0156] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[0157] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Первый датчик положения выполнен с возможностью определения информации о наклоне двух педалей относительно несущей рамы. Выступ, обращенный к колесам, расположен с каждой стороны педали. Педаль поворачивается относительно корпуса транспортного средства посредством выступа, несущая конструкция расположена на рамной конструкции и выполнена с возможностью поддержки выступа и поворота относительно него. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о наклоне.
[0158] Предпочтительно приемный участок предусмотрен внутри несущей рамы и выполнен с возможностью размещения в нем контроллера, два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали, причем приемный участок и накладка расположены между двумя участками под педали.
[0159] Предпочтительно несущая конструкция встроена в несущую раму или установлена на несущую раму.
[0160] Предпочтительно поворотная выемка расположена в несущей конструкции и выполнена с возможностью обеспечения поворота выступа, причем фиксирующая конструкция расположена над поворотной выемкой и выполнена с возможностью фиксации выступа.
[0161] Предпочтительно контроллер встроен в основную печатную плату.
[0162] Предпочтительно несущая рама представляет собой жесткую пластинчатую конструкцию.
[0163] Предпочтительно участок под педаль и приемный участок представляют собой приемные углубления, утопленные внутрь несущей рамы.
[0164] Предпочтительно множество пружинных опор расположено между педалью и нижней частью приемного углубления.
[0165] Предпочтительно индуктивный переключатель расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[0166] Предпочтительно индуктивный переключатель расположен на педали, под педалью, внутри педали или в углублении.
[0167] Предпочтительно индуктивный переключатель содержит по меньшей мере одно из датчика давления и фотоэлектрического датчика, оба из которых выполнены с возможностью определения того, нажата педаль или нет.
[0168] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о наклоне, определенной первым датчиком положения, для приведения колес во вращение.
[0169] Предпочтительно исполнительное устройство расположено внутри несущей рамы или внутри колес.
[0170] Предпочтительно источник питания расположен в приемном участке, причем разделитель расположен в приемном участке и выполнен с возможностью отделения источника питания от контроллера.
[0171] Предпочтительно первый датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
[0172] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
[0173] Предпочтительно первый датчик положения расположен на вспомогательной печатной плате, причем вспомогательная печатная плата прикреплена к педали и перемещается с педалью.
[0174] Предпочтительно несущая рама закрыта сверху педалью.
[0175] Предпочтительно два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы и соединены с возможностью вращения с несущей рамой.
[0176] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[0177] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Две педали соединены с возможностью поворота с несущей рамой. Первый датчик положения выполнен с возможностью определения информации о положении пользователя, стоящего на педали, причем выступ, обращенный к колесам, расположен с каждой стороны педали. Педаль поворачивается относительно корпуса транспортного средства посредством выступа, причем выступ, обращенный к колесам, расположен с каждой стороны педали. Педаль поворачивается относительно корпуса транспортного средства посредством выступа. Несущая конструкция расположена на рамной конструкции и выполнена с возможностью поддержки выступа и поворота относительно него. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о положении.
[0178] Предпочтительно приемный участок предусмотрен внутри несущей рамы и выполнен с возможностью размещения в нем контроллера, два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали, причем приемный участок и накладка расположены между двумя участками под педали.
[0179] Предпочтительно несущая конструкция встроена в несущую раму или установлена на несущую раму.
[0180] Предпочтительно корпус транспортного средства дополнительно содержит по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой, причем первый датчик положения выполнен с возможностью определения степеней деформации пружинных опор для определения информации о положении пользователя, стоящего на педали.
[0181] Предпочтительно первый датчик положения выполнен с возможностью определения показателя деформации пружинных опор на основании уравновешенного положения пружинных опор для определения деформации пружинных опор.
[0182] Предпочтительно педаль соединена с возможностью поворота с несущей рамой на оси колес, и первый датчик положения выполнен с возможностью определения информации о повороте педали в направлении, параллельном оси колес.
[0183] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно земли, причем контроллер выполнен с возможностью приведения колес в движение вперед или назад на основании информации о наклоне, определенной вторым датчиком положения, и контроллер выполнен с возможностью приведения колес в движение для выполнения поворотов на основании информации о повороте, определенной первым датчиком положения.
[0184] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[0185] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Первый датчик положения выполнен с возможностью определения информации о положении, информации о силе тяжести или информации о нажатии пользователя, стоящего на педали.
[0186] Предпочтительно информация о силе тяжести представляет собой информацию о наклоне.
[0187] Предпочтительно корпус транспортного средства выполняет повороты, когда определенная информация о положении, информация о силе тяжести или информация о нажатии одной из двух педалей не равна соответствующей информации другой из двух педалей.
[0188] Предпочтительно корпус транспортного средства перемещается вперед или назад, когда корпус транспортного средства наклоняется вперед или назад.
[0189] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя.
[0190] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Первый датчик положения выполнен с возможностью определения информации о нажатии пользователя, стоящего на педали. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о нажатии и выполнения поворотов на основании разницы скоростей двух колес.
[0191] Предпочтительно первый датчик положения представляет собой датчик давления.
[0192] Предпочтительно первый датчик положения выполнен с возможностью определения незначительного изменения угла наклона педали.
[0193] Предпочтительно первый датчик положения выполнен с возможностью определения информации о деформации педали относительно несущей рамы.
[0194] Предпочтительно педаль прикреплена к несущей раме.
[0195] Предпочтительно два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали.
[0196] Предпочтительно несущая рама представляет собой жесткую пластинчатую конструкцию.
[0197] Предпочтительно первый датчик положения выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[0198] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о нажатии, определенной первым датчиком положения, для приведения колес во вращение.
[0199] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 178, отличающееся тем, что исполнительное устройство расположено внутри несущей рамы или внутри колес.
[0200] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 178, отличающееся тем, что педаль содержит платформу и коврик, расположенный на платформе, причем первый датчик положения расположен под платформой.
[0201] Предпочтительно транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
[0202] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 181, отличающееся тем, что первый датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
[0203] Предпочтительно несущая рама закрыта сверху педалью.
[0204] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 183, отличающееся тем, что несущая рама представляет собой жесткий вал, причем противоположные концы несущей рамы соединены с возможностью поворота с двумя колесами.
[0205] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 184, отличающееся тем, что первый датчик положения расположен между педалью и несущей рамой и выполнен с возможностью определения информации о нажатии педали.
[0206] Предпочтительно два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы и соединены с возможностью вращения с несущей рамой.
[0207] Вышеописанные транспортные средства с человекомашинным взаимодействием, работающие в зависимости от положения тела пользователя, могут иметь следующие преимущества.
[0208] Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит несущую раму цельной конструкции, которая выполняет функцию поддержки. Педаль расположена несущей раме независимым образом. По сравнению с балансирующим транспортным средством, известным из уровня техники, транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, имеет простую конструкцию, не содержащую две соединенные с возможностью поворота конструкции, выполненные с возможностью раздельной установки двух педалей.
Краткое описание графических материалов
[0209] Далее приводится ссылка на прилагаемые графические материалы, предназначенные для лучшей иллюстрации настоящего изобретения. Однако на прилагаемых графических материалах представлены только некоторые варианты осуществления настоящего изобретения, не имеющие ограничительного характера.
[0210] На фиг. 1 представлено изображение в разобранном виде транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, в соответствии с первым вариантом осуществления настоящего изобретения.
[0211] На фиг. 2 представлен вид в перспективе транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, в соответствии с первым вариантом осуществления настоящего изобретения.
[0212] На фиг. 3 представлено изображение в разобранном виде транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, показанного на фиг. 2.
[0213] На фиг. 4 представлено изображение в частично разобранном виде транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, показанного на фиг. 2.
[0214] На фиг. 5 представлено изображение в частично разобранном виде транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, показанного на фиг. 4.
[0215] На фиг. 6 представлен вид в перспективе педали и множества пружинных опор транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, показанного на фиг. 4.
[0216] На фиг. 7 представлен вид в перспективе транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, в соответствии со вторым вариантом осуществления настоящего изобретения.
[0217] На фиг. 8 представлен вид в перспективе транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, в соответствии с третьим вариантом осуществления настоящего изобретения.
Подробное описание изобретения
[0218] В последующем описании приведено наглядное и подробное пояснение настоящего изобретения в сочетании с вариантами осуществления и прилагаемыми графическими материалами. Разумеется, варианты осуществления, описанные в настоящем документе, представляют собой только часть, а не все варианты осуществления настоящего изобретения. Любые другие варианты осуществления, полученные специалистами в данной области техники без приложения изобретательских усилий, находятся в пределах объема правовой охраны настоящего изобретения.
[0219] На фиг. 1-5 показано транспортное средство 100 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, в соответствии с первым вариантом осуществления. Транспортное средство 100 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус 10 транспортного средства и два колеса 20, соединенные с корпусом 10 транспортного средства.
[0220] Предпочтительно плоскости двух колес 20 могут быть параллельны друг другу, и оси двух колес 20 расположены по существу на одной воображаемой прямой линии. Два колеса 20 могут быть установлены с противоположных сторон корпуса 10 транспортного средства посредством соответствующих осей. Например, два колеса 20 могут быть установлены с противоположных сторон корпуса 10 транспортного средства соответственно, или установлены с двух сторон под корпусом 10 транспортного средства. В этом варианте осуществления два колеса 20 могут быть соединены с возможностью вращения с противоположными сторонами корпуса 10 транспортного средства. Два колеса 20 выполнены с возможностью вращения на геометрической оси корпуса 10 транспортного средства, которая может по существу совпадать с вышеуказанной воображаемой прямой линией, тем самым обеспечивая перемещение транспортного средства 100 с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя.
[0221] Корпус 10 транспортного средства может содержать несущую раму 11, две педали 12, расположенные на несущей раме 11, множество первых датчиков 13 положения и контроллер 15. Несущая рама 11 выполнена в виде цельной конструкции и соединена с возможностью поворота с двумя колесами 20. Выражение «цельная конструкция» означает, что составляющие части несущей рамы 11 выполнены без возможности перемещения друг относительно друга, вследствие чего несущая рама представляет собой по существу единую деталь, что отличается от решений из уровня техники тем, что в традиционном транспортном средстве с человекомашинным взаимодействием, работающем в зависимости от положения тела пользователя, левая внутренняя накладка выполнена с возможностью поворота относительно правой внутренней накладки. Несущая рама 11 может быть выполнена в виде цельной конструкции посредством литья, сварки или заклепочного соединения. Несущая рама 11 может иметь любую форму, например жесткой пластинчатой конструкции или жесткого вала. В этом варианте осуществления несущая рама 11 представляет собой жесткую пластинчатую конструкцию. Два симметричных участка 111 под педали предусмотрены на стороне несущей рамы 11, обращенной от земли. Две педали 12 соответственно расположены в двух участках 111 под педали. По меньшей мере один из множества первых датчиков 13 положения расположен в участках 111 под педали. Участки 111 под педали могут представлять собой приемные углубления 1110, утопленные внутрь несущей рамы 11. Выступ 121, обращенный к колесам 20, расположен с каждой стороны педали 12, причем педаль 12 поворачивается относительно корпуса 10 транспортного средства посредством выступа 121, вследствие чего две педали 12 соединены с возможностью поворота с несущей рамой 11. Участки 111 под педали могут быть плоскими, без углубления, и педали 12 могут быть расположены на несущей раме 11.
[00222] Педаль 12 может быть независимо установлена на несущей раме 11. Выражение «независимо установлена» означает, что педаль 12 не расположена неподвижно на несущей раме 11, но установлена на несущей раме 11 с некоторой степенью свободы посредством промежуточных соединений, вследствие чего педаль 12 выполнена с возможностью перемещения относительно несущей рамы 11. Например, педаль 12 может быть соединена с возможностью поворота с несущей рамой 11 на оси колеса 20 или на геометрической оси колеса 20. В этом варианте осуществления педаль 12 соединена с возможностью поворота с несущей рамой 11 на оси колеса 20. Когда пользователь стоит на педали 12, педаль 12 выполнена с возможностью поворота и углом наклона относительно несущей рамы 11. Педаль 12 может иметь любую форму, например пластинчатой конструкции. В этом варианте осуществления педаль 12 представляет собой пластинчатую конструкцию. Педаль 12 содержит пластинчатую платформу 127, фиксирующий элемент 122, установленный на нижней части педали 12 или выполненный как единое целое с ней, и монтажный вал 120, установленный в фиксирующем элементе 122 или выполненный как единое целое с ним. Выступ 121, обращенный к колесам 20, расположен на монтажном валу 120 и закрывает часть педали 12. Таким образом, монтажный вал 120 повышает прочность педали 12. Выступ 121 может быть выполнен на фиксирующем элементе 122 или платформе 127, или установлен на фиксирующем элементе 122 или платформе 127.
[0223] Первый датчик 13 положения выполнен с возможностью определения информации о повороте или информации о наклоне пользователя, стоящего на педали 12, и отправки информации о повороте или информации о наклоне на контроллер 15. Контроллер 15, таким образом, управляет вращением колес 20 в соответствии с информацией о наклоне, так, что пользователь может управлять транспортным средством 100 с человекомашинным взаимодействием, работающим в зависимости от положения тела пользователя, для перемещения. Колеса 20 выполнены не только с возможностью вращения посредством первого датчика 13 положения, но, кроме того, колеса 20 выполнены с возможностью перемещения вперед и назад, если информация о наклоне или информация о повороте двух педалей 12 незначительно отличается, или выполнения поворотов, например поворота направо или поворота налево, если информация о наклоне или информация о повороте двух педалей 12 отличается значительно. Информация об угловом положении может включать информацию о положении пользователя, стоящего на педали 12. Первый датчик 13 положения может представлять собой измерительный прибор любого типа. Например, первый датчик 13 положения может представлять собой гироскоп, датчик давления или фотоэлектрический датчик. Если первый датчик 13 положения представляет собой фотоэлектрический датчик, педаль 12 может быть соединена с возможностью поворота с несущей рамой 11 или прикреплена к несущей раме 11. Количество первых датчиков 13 положения может быть любым, например, первый датчик 13 положения может быть один или их может быть несколько. В этом варианте осуществления количество первых датчиков 13 положения равно одному. Место расположения первого датчика 13 положения не ограничено. Например, первый датчик 13 положения расположен на индуктивном переключателе 14 или встроен в индуктивный переключатель 14. Второй датчик положения может быть расположен на корпусе 10 транспортного средства и выполнен с возможностью определения информации о наклоне несущей рамы 11 относительно колес 20 для определения информации о наклоне несущей рамы 11 относительно земли. Транспортное средство 100 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, выполнено с возможностью перемещения вперед или назад в соответствии с информацией о наклоне, определенной вторым датчиком положения. Транспортное средство 100 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, выполнено с возможностью перемещения вперед или назад в соответствии с наклоном корпуса 10 транспортного средства, то есть, при одинаковых угловых скоростях двух колес 20, приводимых в движение исполнительным устройством. Исполнительное устройство может приводить колеса 20 в движение для выполнения поворотов в соответствии с информацией о наклоне, определенной первым датчиком 13 положения. В этом варианте осуществления транспортное средство 100 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, выполняет повороты в соответствии с углом наклона педали 12, то есть, при разных угловых скоростях двух колес 20, приводимых в движение исполнительным устройством. В этом варианте осуществления первый датчик 13 положения и/или второй датчик положения встроены во вспомогательную печатную плату 124. Вспомогательная печатная плата 124 прикреплена к педали 12. Первый датчик 13 положения на вспомогательной печатной плате 124 выполнен с возможностью поворота с платформой 127 для регистрации перемещения платформы 127. Множество монтажных штырей 125 выступает из платформы 127 и выполнено с возможностью фиксации вспомогательной печатной платы 124. Кроме того, первый датчик 13 положения может быть соединен с платформой 127 любыми средствами для поворота с платформой 127.
[0224] В этом варианте осуществления индуктивные переключатели 14 расположены в участках 111 под педали корпуса 10 транспортного средства транспортного средства 100 с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, и выполнены с возможностью регистрации того, нажата педаль 12 или нет, для управления вращением колес 20 или их остановкой. Подробнее, когда индуктивные переключатели 14 нажаты двумя педалями 12 по отдельности, и величина нажатия на индуктивные переключатели 14 одинакова, транспортное средство 100 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, начнет перемещаться, это необходимо для того, чтобы предотвратить начало перемещения транспортного средства 100 с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, и неожиданную травму, когда только одна педаль 12 нажата пользователем. В этом варианте осуществления индуктивные переключатели 14 расположены на платформе 127. В других вариантах осуществления индуктивные переключатели 14 могут быть расположены под платформой 127 и регистрировать опускание платформы 127 для управления вращением колес 20 или их остановкой. Кроме того, углубление может быть расположено на платформе 127 для размещения в нем индуктивных переключателей 14.
[0225] В этом варианте осуществления корпус 10 транспортного средства дополнительно содержит множество пружинных опор 17. Множество пружинных опор 17 расположено между педалью 12 и нижней частью приемного углубления 1110 и образует демпфер, предотвращающий нажатие педали 12 относительно первого датчика 13 положения и индуктивных переключателей 14 и обеспечивающий возврат педали 12 в исходное положение. Множество пружинных опор представляют собой пружины. Пружины могут быть прикреплены к крепежному выступу 112 приемного углубления 1110 или педали 12. В другом варианте осуществления множество пружинных опор могут представлять собой торсионные пружины (не показаны).
[0226] В другом варианте осуществления множество пружинных опор 17 может представлять собой конструкцию, работающую на сжатие. Подробнее, датчик давления расположен между пружинами или в платформе 127. Например, при наклоне педали 12, датчик давления может определять информацию о нажатии, информацию о силе тяжести или информацию о положении. Контроллер 15 может управлять перемещением или поворотом корпуса 10 транспортного средства в соответствии с информацией о нажатии, информации о силе тяжести или информации о положении. Педаль 12 соединена с возможностью поворота с несущей рамой 11.
[0227] В другом варианте осуществления множество пружинных опор 17 могут представлять собой емкостные устройства или индуктивные устройства. То есть, объем транспортного средства 10 может быть уменьшен без поворота педали 12. Когда пользователь стоит на педали 12, емкостные устройства или индуктивные устройства могут определять давление и управлять вращением колес 20. Колеса 20 выполнены с возможностью перемещения вперед или назад, выполнения поворотов, ускорения или замедления в соответствии с различными значениями давления в различных положениях, определенными емкостными устройствами или индуктивными устройствами. Педали 12 могут быть оснащены комбинацией датчика давления и емкостных устройств или индуктивных устройств. Количество емкостных устройств или индуктивных устройств, которыми оснащена педаль 12, может быть произвольным. Педали 12 могут быть оснащены одним емкостным устройством или одним индуктивным устройством. Педали могут быть оснащены двумя емкостными устройствами или двумя индуктивными устройствами. Педали могут быть оснащены множеством емкостных устройств или множеством индуктивных устройств.
[0228] Альтернативно корпус 10 транспортного средства может дополнительно содержать источник 16 питания и исполнительное устройство (не показано). Источник 16 питания может подавать электроэнергию на исполнительное устройство, первый датчик 13 положения и контроллер 15. Контроллер 15 может управлять источником 16 питания, исполнительным устройством и первым датчиком 13 положения отправлять возбуждающий сигнал на исполнительное устройство на основании информации о наклоне, определенной первым датчиком 13 положения, тем самым приводя колеса 20 во вращение. Как правило, корпус 10 транспортного средства может содержать два исполнительных устройства, соответственно установленных в два колеса 20 для управления соответствующими колесами 20. В другом варианте осуществления исполнительные устройства могут быть установлены в несущей раме 11 для сведения к минимуму объема колес 20.
[0229] В этом варианте осуществления несущая рама 11 имеет форму лодки и содержит два приемных углубления 1110 и приемный участок 116, расположенный между двумя приемными углублениями 1110 и используемые для размещения в нем источника 16 питания и контроллера 15. Контроллер 15 может представлять собой основную печатную плату. Разделитель 115 расположен между источником 16 питания и контроллером 15 и выполнен с возможностью их отделения и предотвращения воздействия друг на друга.
[0230] Накладка 117 расположена над приемным участком 116 и используется для защиты источника 16 питания и контроллера 15.
[0231] Несущая конструкция 113 расположена между приемным участком 116 и приемным углублением 1110 и выполнена с возможностью поддержки выступа и поворота относительно него 121 педали 12. Несущая конструкция 113 встроена в несущую раму 11 или установлена на несущую раму 11. Поворотная выемка 1130 расположена на несущей конструкции 113 и несущей раме 11 и выполнена с возможностью обеспечения поворота выступа 121. Фиксирующая конструкция 114 расположена над поворотной выемкой 1130 и выполнена с возможностью фиксации выступа 121. Фиксирующая конструкция 114 встроена в несущую раму 11 или установлена на несущую раму 11.
[0232] Корпус транспортного средства дополнительно содержит выдвижной кожух, расположенный на несущей раме 11 и выполненный с возможностью выдвижения в направлении, перпендикулярном оси колес 10. Выдвижной кожух может быть выдвинут в направлении движения вперед или назад транспортного средства 100 с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя. Выдвижной кожух содержит первый кожух 101 и второй кожух 102. Первый кожух 101 выполнен с возможностью выдвижения в направлении спереди и назад и заключен в несущую раму 11. Второй кожух 102 выполнен с возможностью извлечения сзади вперед и заключен в несущую раму 11. Подробнее, выдвижной кожух содержит две торцевые части 104, обращенные к колесам 20, боковую часть 103, используемую для соединения двух торцевых частей 104, верхнюю часть 106, обращенную от земли, и нижнюю часть 105, обращенную к верхней части 106. Углубление 107 расположено на верхней части 106 и выполнено с возможностью размещения в нем педали 12. В этом варианте осуществления второй кожух 102 симметричен первому кожуху 101. Альтернативно второй кожух 102 может быть асимметричен первому кожуху 101, причем первый кожух 101 и второй кожух 102 установлены сверху или снизу, под произвольным углом относительно оси колес или геометрической оси колес.
[0233] Накладка 126 педали расположена на педали 12. Накладка 126 педали прикреплена к педали 12. Противоскользящий коврик 123 расположен на накладке 126 педали и используется для того, чтобы на нем стоял пользователь. Альтернативно накладка 126 педали может быть прикреплена к несущей раме 11 или выдвижному кожуху. Середина накладки 126 педали может быть полой или иметь гибкую конструкцию, вследствие чего педаль 12 выполнена с возможностью перемещения вверх или вниз, или наклона, когда на противоскользящий коврик 123 нажимает пользователь.
[0234] Крыло 21 колеса расположено над колесом 20. Фиксирующая часть 22 выступает со стороны крыла 21 колеса. Фиксирующая часть 22 установлена на несущую раму 11 или выдвижной кожух. Альтернативно крыло 21 колеса может быть встроено в несущую раму 11 или выдвижной кожух.
[0235] На фиг. 7 показано транспортное средство 200 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, в соответствии со вторым вариантом осуществления. Первый датчик положения может определять угол поворота педали 212 для определения угол наклона педали 212 относительно несущей рамы 211.
[0236] В этом варианте несущая рама 211 представляет собой жесткий вал. Педаль 212 заключена в жесткий вал и соединена с возможностью поворота с несущей рамой 211. Первый датчик положения расположен между несущей рамой 211 и жестким валом и выполнен с возможностью определения угла наклона несущей рамы 211 относительно жесткого вала. Если первый датчик положения представляет собой датчик давления, причем датчик давления используется для определения информации о нажатии, информации о силе тяжести или информации о положении педали. Датчик давления может определять незначительный угол поворота или угол наклона несущей рамы 211 относительно жесткого вала. Хотя угол поворота или угол наклона является совершенно незначительным, несущая рама 211 и жесткий вал могут рассматриваться как соединенные с возможностью поворота.
[0237] Предлагается другое транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус транспортного средства. Корпус транспортного средства содержит по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой. Первый датчик положения выполнен с возможностью определения степеней деформации пружинных опор для определения информации о положении пользователя, стоящего на педали. Подробнее, первый датчик положения выполнен с возможностью определения показателя деформации пружинных опор на основании уравновешенного положения пружинных опор для определения деформации пружинных опор.
[0238] Предпочтительно педаль соединена с возможностью поворота с несущей рамой на оси колес.Первый датчик положения выполнен с возможностью определения информации о повороте педали в направлении, параллельном оси колес.
[0239] На фиг. 8 показано другое транспортное средство 300 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя. Транспортное средство 300 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус 30 транспортного средства и два колеса 304, расположенные на корпусе 30 транспортного средства. Колеса 304 выполнены с возможностью вращения относительно корпуса 30 транспортного средства на оси колес.Корпус 30 транспортного средства дополнительно содержит несущую раму 31 и две педали 32, расположенные на несущей раме 31. Несущая рама 31 представляет собой цельную конструкцию и соединена с возможностью поворота с колесами 304. Датчик давления расположен на педали 32 и выполнен с возможностью определения информации о нажатии, информации о силе тяжести или информации о положении двух педалей 32. Транспортное средство 300 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит контроллер, выполненный с возможностью приведения колес во вращение на основании определенной информации о нажатии, информации о силе тяжести или информации о положении. Контроллер расположен внутри корпуса транспортного средства. Педали 32 могут быть прикреплены к несущей раме 31 или соединены с возможностью поворота с несущей рамой 31. Выражение «соединены с возможностью поворота» означает, что педали 32 поворачиваются на геометрической оси несущей рамы 31, причем информация о повороте может рассматриваться как информация о наклоне. Кроме того, угол поворота может быть произвольным, например, в варианте осуществления педали поворачиваются на оси колеса или пружинной опоре, расположенной в педали, причем угол наклона или угол поворота может быть большим. Кроме датчика давления, присоединенного с возможностью поворота, когда датчик давления расположен на плоской поверхности участка под педаль, хотя угол поворота или угол наклона является совершенно незначительным, несущая рама 31 и жесткий вал могут рассматриваться как соединенные с возможностью поворота. Если датчик давления прикреплен к несущей раме 31, угол поворота или угол наклона, определенный за счет распределения давлений, является совершенно незначительным, несущая рама 31 и педаль могут рассматриваться как соединенные с возможностью поворота. Альтернативно, если участок под педаль является плоским, педаль может быть прикреплена к несущей раме 31.
[0240] Подробнее, когда пользователь стоит на двух педалях 32 и информация о положении, информация о силе тяжести или информация о нажатии двух педали 32 отличаются, корпус 30 транспортного средства выполняет поворот.
[0241] Например, контроллер используется для управления вращением колес 304 в соответствии с информацией о нажатии двух педалей 32. Корпус транспортного средства выполняет поворот влево или поворот вправо в соответствии с информацией о нажатии левой и правой педалей 32. Если информации о нажатии левой и правой педалей 32 отличается, левое колесо 304 имеет скорость, которая больше скорости правого колеса, что приводит к выполнению поворота влево корпуса транспортного средства, при этом угол наклона между левой педалью и правой педалью является незначительным, и левая педаль и правая педаль наклонены вправо и вниз. Информация о силе тяжести может рассматриваться как информация о наклоне, и распределение силы тяжести определяется датчиком давления. Хотя угол поворота или угол наклона является совершенно незначительным, педали рассматриваются как наклоненные и имеют незначительный угол наклона.
[0242] Датчик давления может определять, стоит пользователь на педали или нет, и управлять вращением колес 304 или их остановкой. В этом варианте осуществления индуктивный переключатель, выполненный с возможностью определения того, нажата педаль или нет, является необязательным, в целях упрощения конструкции корпуса транспортного средства.
[0243] Педаль 32 содержит платформу и противоскользящий коврик, расположенный на платформе. Датчик давления расположен под платформой. Подробнее, когда пользователь стоит на педали, информация о нажатии определяется датчиком давления и отправляется на контроллер посредством электропроводящей катушки.
[0244] Когда весь корпус 30 транспортного средства наклонен вперед или назад, корпус 30 транспортного средства перемещается вперед или назад.
[0245] Подробнее, транспортное средство 300 с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, выполненный с возможностью определения информации о наклоне несущей рамы 31 относительно колес 304. Второй датчик положения может включать гироскоп, датчик давления, фотоэлектрический датчик и т.д. Гироскоп может быть закреплен на печатной плате внутри несущей рамы 31. Печатная плата может представлять собой цельную деталь или может быть разделена на две детали. Гироскоп может быть выполнен с возможностью «самобалансировки». Когда пользователь и несущая рама 31 наклонены вперед, гироскоп может определять информацию о наклоне и отправлять ее на контроллер. Контроллер может управлять движением колес 304 вперед, причем весь корпус транспортного средства управляется усилием наклона назад, в результате чего обеспечивается эффект самобалансировки.
[0246] Таким образом, вышеописанное транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит несущую раму цельной конструкции, которая выполняет функцию поддержки. Педаль расположена несущей раме независимым образом. Отсутствует необходимость в двух соединенных с возможностью поворота конструкциях, выполненных с возможностью установки педали. По сравнению с балансирующим транспортным средством, известным из уровня техники, предложенное транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, имеет простую и цельную конструкцию, выполненную с возможностью надежного выдвижения, которая не содержит направляющий штырь и две соединенные с возможностью поворота конструкции, выполненные с возможностью раздельной установки двух педалей. Корпус транспортного средства предложенного транспортного средства с человекомашинным взаимодействием, работающего в зависимости от положения тела пользователя, является намного более прочным.
[0247] В описании выше приведены лишь иллюстративные варианты осуществления настоящего изобретения, которые не следует рассматривать как ограничивающие объем настоящего изобретения. Любые модификации, замены или усовершенствования, выполненные без отхода от сущности и идей настоящего изобретения, находятся в пределах объема правовой охраны настоящего изобретения.
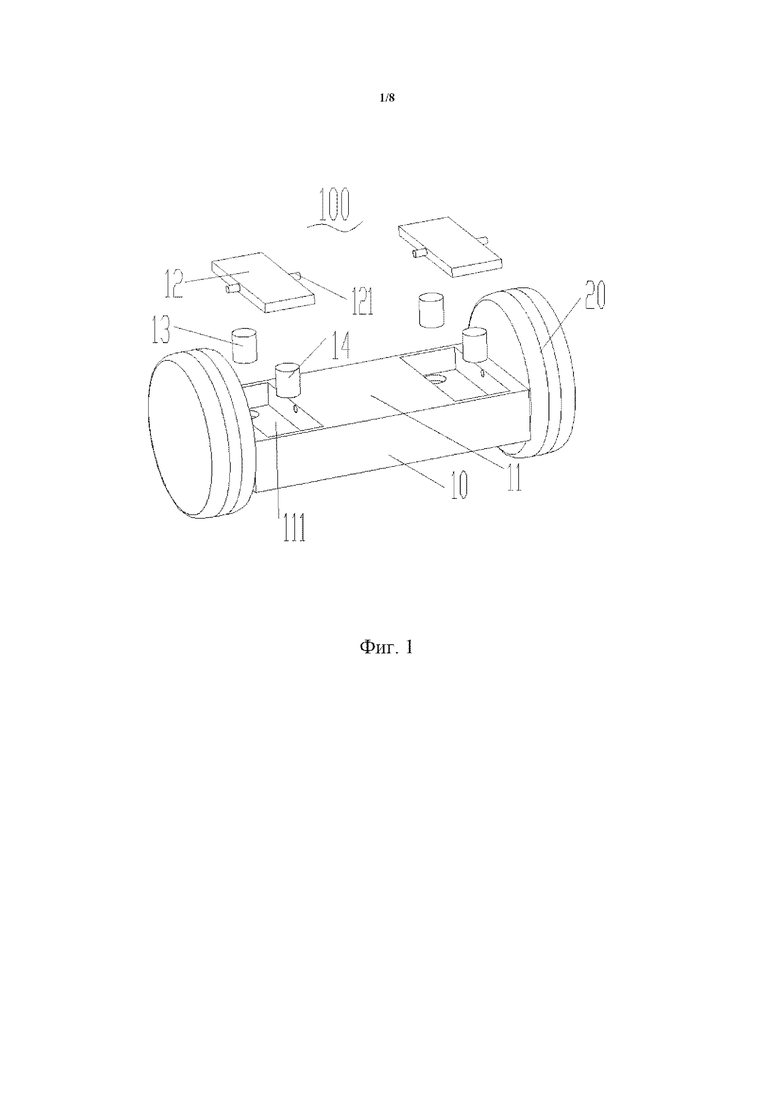
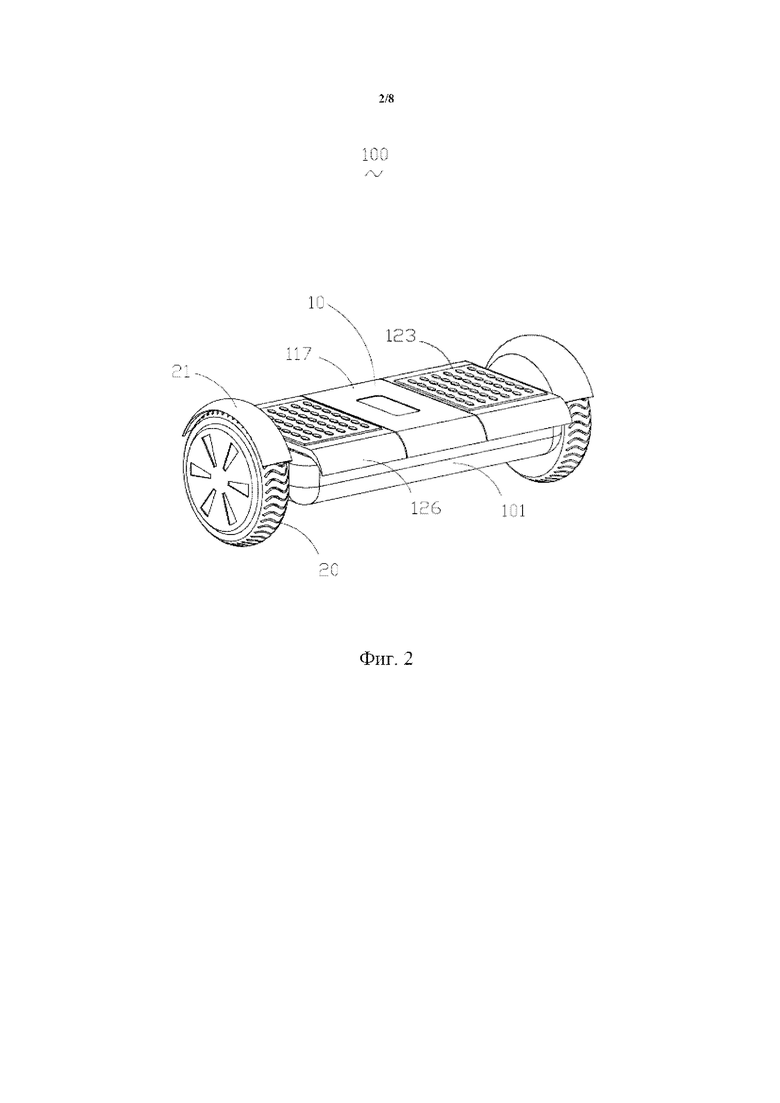
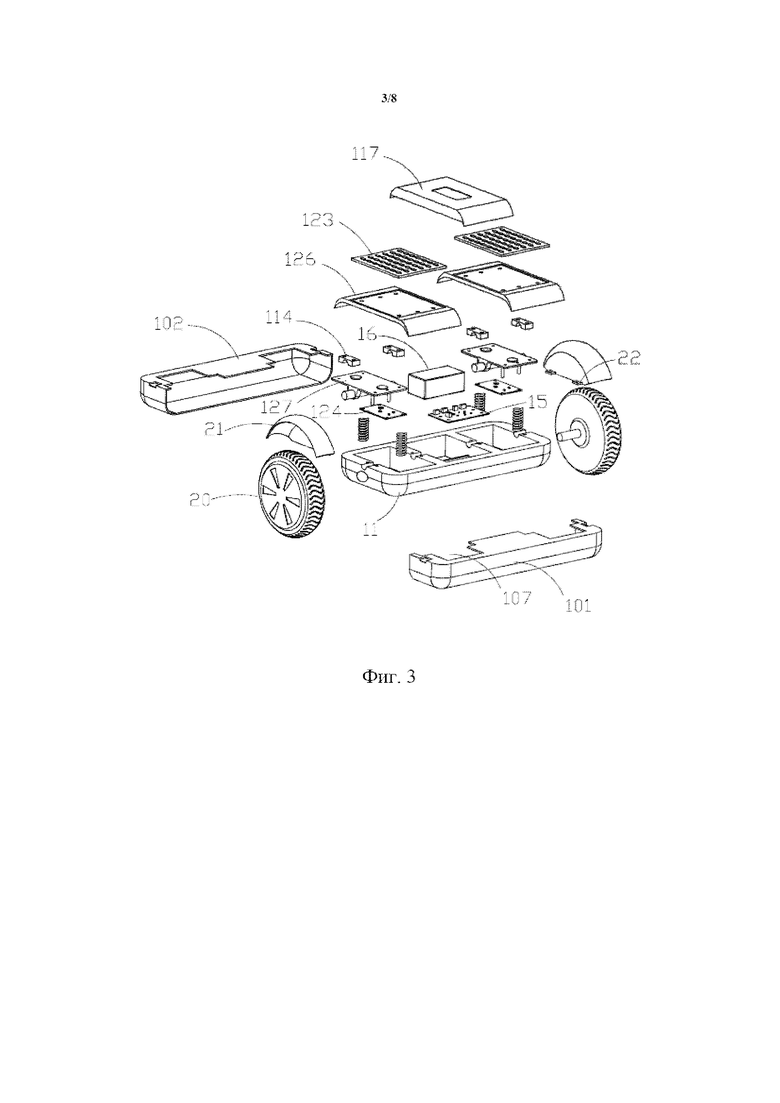
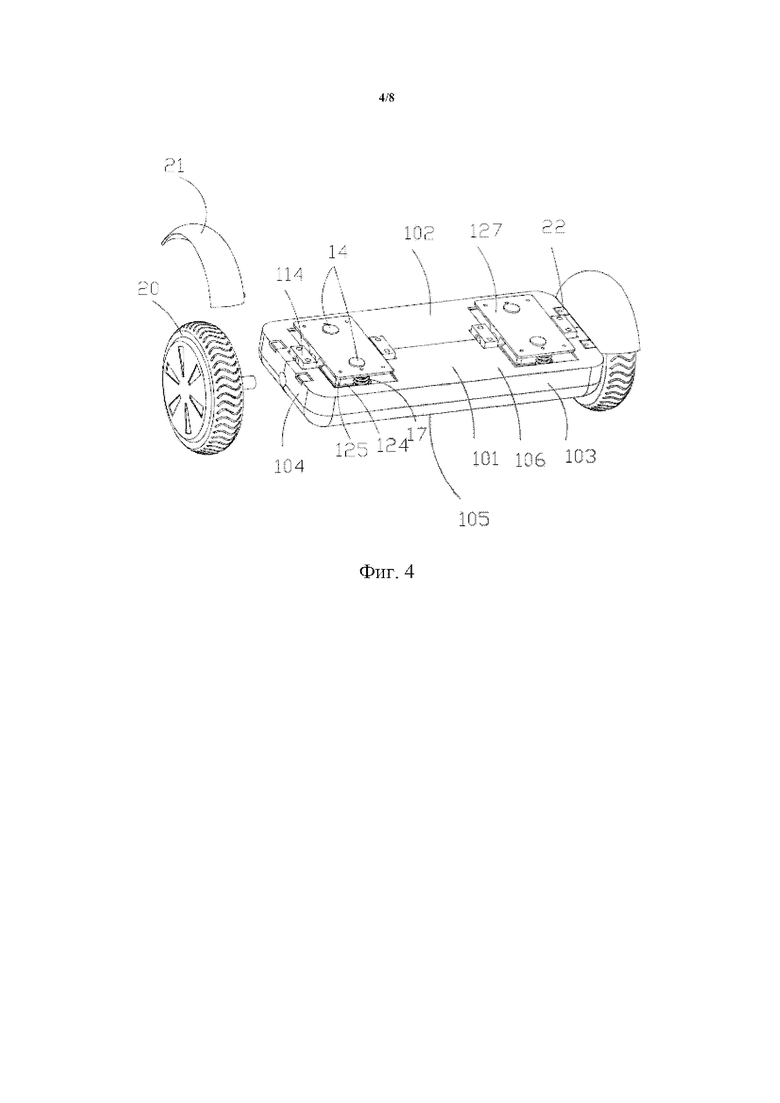
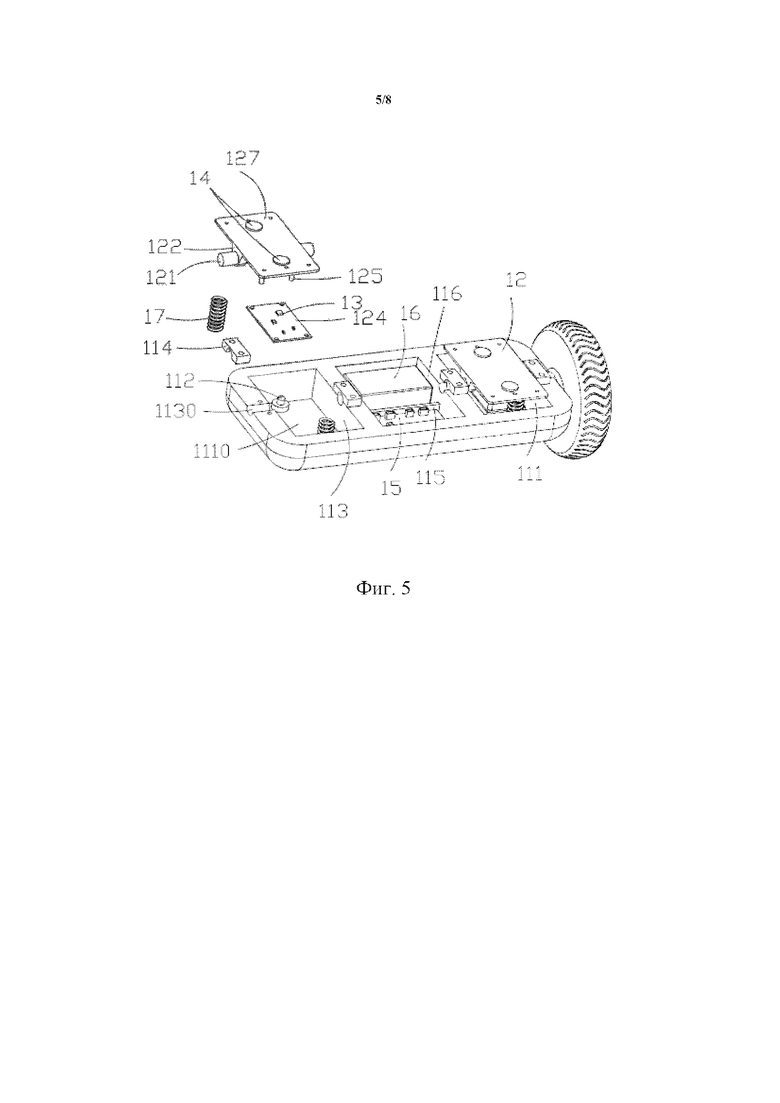
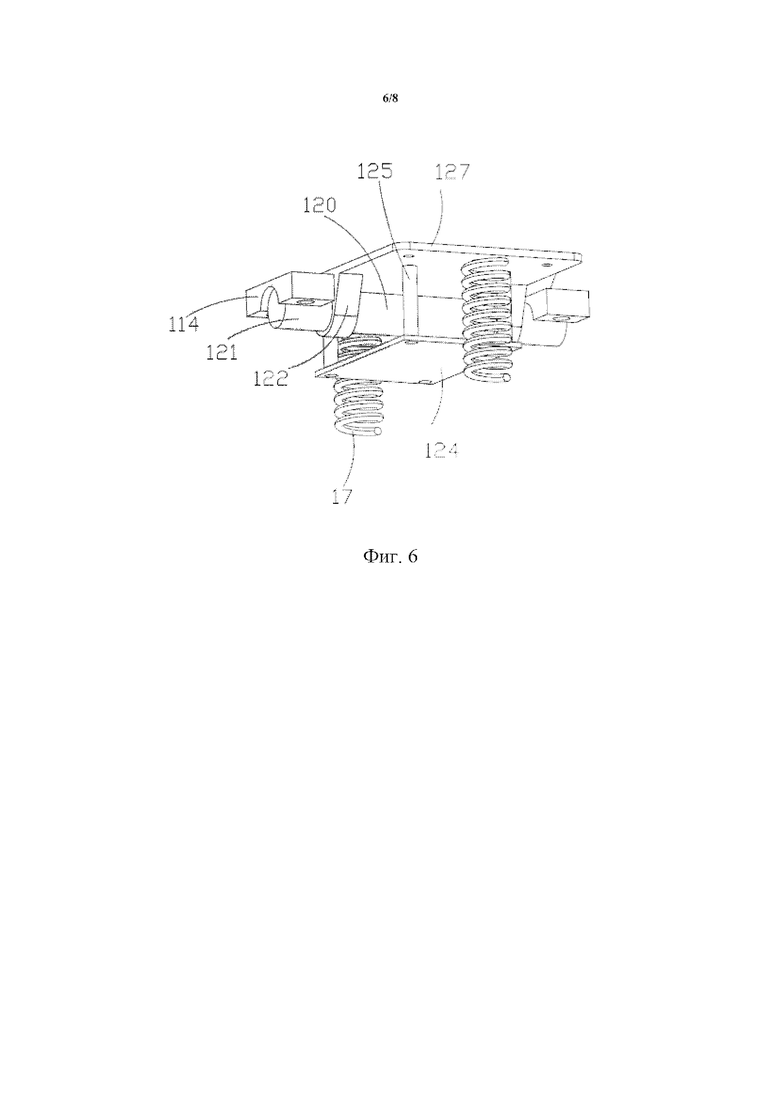
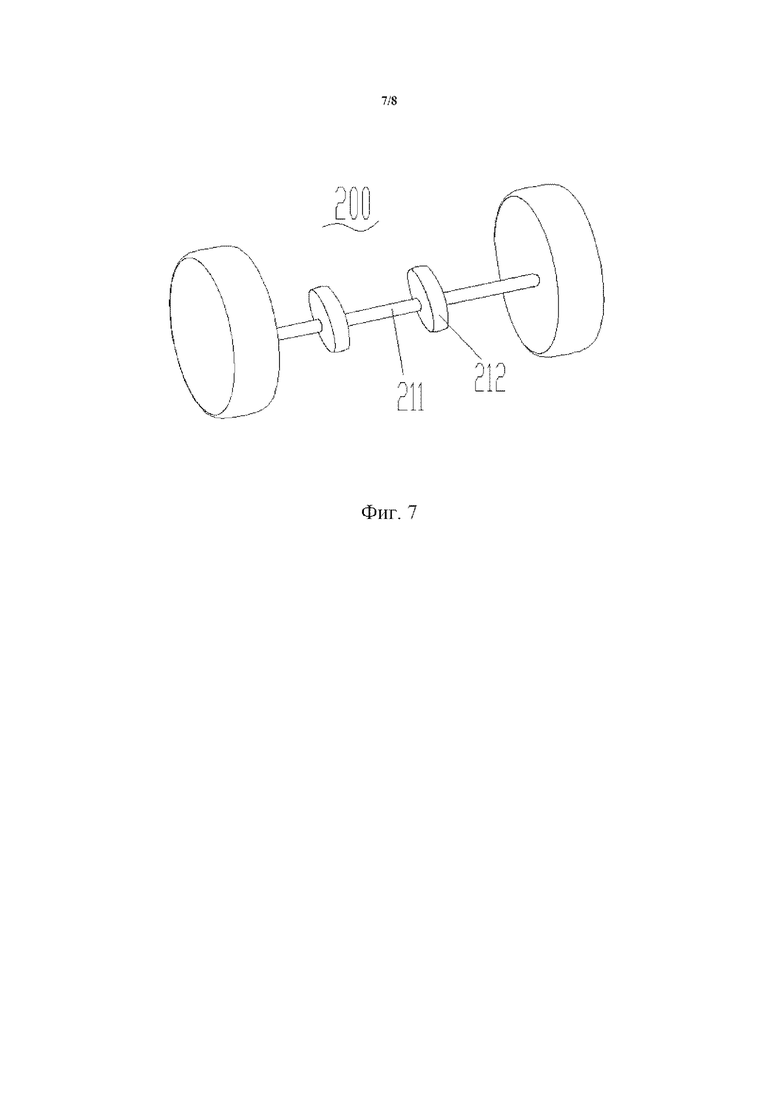
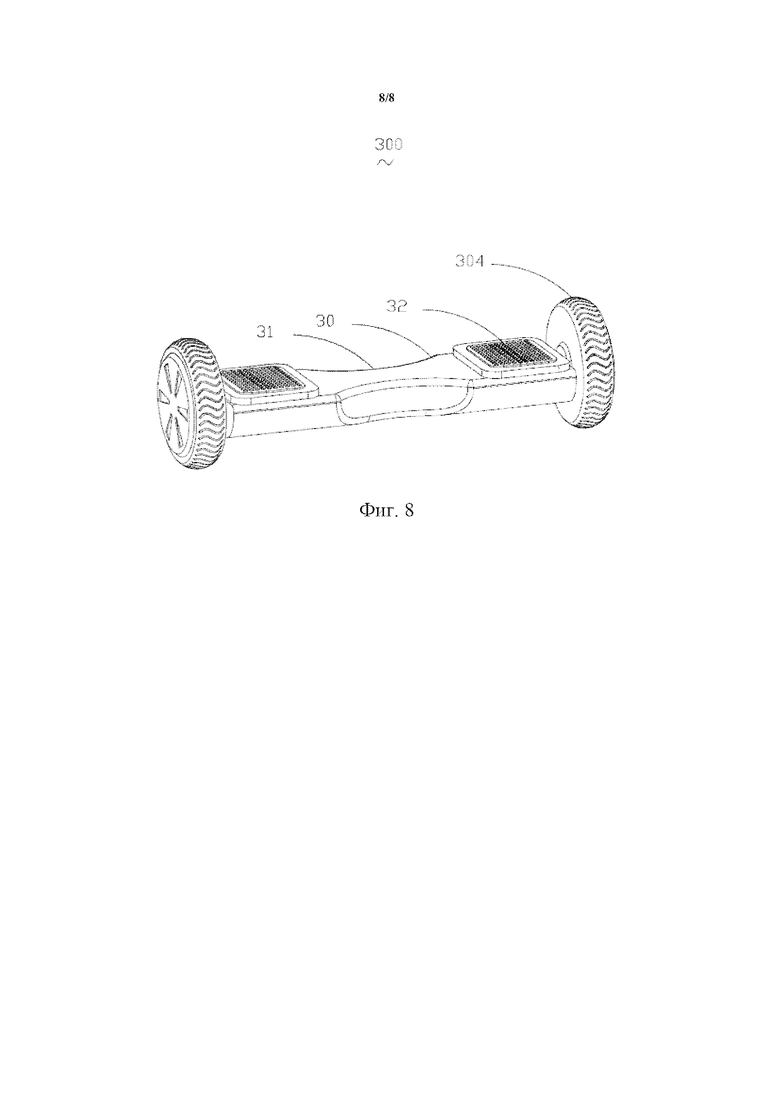
Изобретение относится к области машиностроения, в частности к транспортным средствам с человекомашинным взаимодействием. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержит корпус и два колеса, соединенные с корпусом. Колесо вращается относительно корпуса транспортного средства на оси колеса. Корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер. Две педали расположены на несущей раме и соединены с ней с возможностью поворота. Несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами. Первый датчик положения выполнен с возможностью определения информации о положении, информации о силе тяжести или информации о нажатии пользователя, стоящего на педали. Достигается упрощение конструкции транспортного средства. 14 з.п. ф-лы, 8 ил.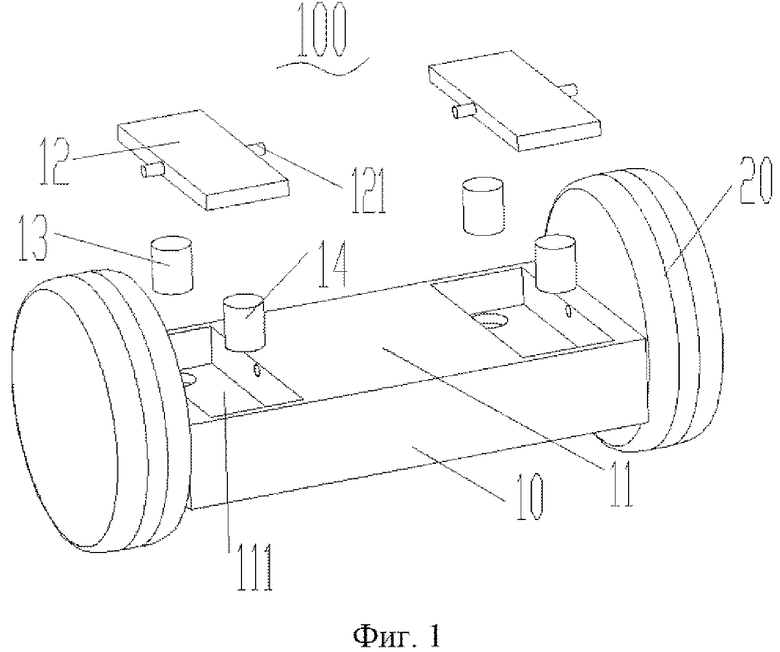
1. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, содержащее корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства, причем колесо вращается относительно корпуса транспортного средства на оси колеса, отличающееся тем, что корпус транспортного средства содержит несущую раму, две педали, первый датчик положения и контроллер, причем две педали расположены на несущей раме и соединены с ней с возможностью поворота, несущая рама представляет собой цельную конструкцию и соединена с возможностью поворота с колесами, и первый датчик положения выполнен с возможностью определения информации о положении, информации о силе тяжести или информации о нажатии пользователя, стоящего на педали.
2. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что корпус транспортного средства выполняет повороты, когда определенная информация о положении, информация о силе тяжести или информация о нажатии одной из двух педалей не равна соответствующей информации другой из двух педалей.
3. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что корпус транспортного средства перемещается вперед или назад, когда корпус транспортного средства наклоняется вперед или назад.
4. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что первый датчик положения выполнен с возможностью определения информации о нажатии пользователя, стоящего на педали, и контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации о нажатии и выполнения поворотов на основании разницы скоростей двух колес.
5. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что первый датчик положения представляет собой датчик давления.
6. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что первый датчик положения выполнен с возможностью определения незначительного изменения угла наклона педали.
7. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что первый датчик положения выполнен с возможностью определения информации о деформации педали относительно несущей рамы.
8. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что два симметричных участка под педали предусмотрены на стороне несущей рамы, обращенной от земли, причем две педали соответственно расположены в двух участках под педали.
9. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что первый датчик положения выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
10. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации о давлении, определенной первым датчиком положения, для приведения колес во вращение.
11. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что педаль содержит платформу и коврик, расположенный на платформе, причем первый датчик положения расположен под платформой.
12. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, дополнительно содержит второй датчик положения, причем второй датчик положения выполнен с возможностью определения информации о наклоне несущей рамы относительно колес.
13. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 12, отличающееся тем, что первый датчик положения содержит по меньшей мере одно из гироскопа, датчика давления и фотоэлектрического датчика.
14. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 1, отличающееся тем, что несущая рама закрыта сверху педалью.
15. Транспортное средство с человекомашинным взаимодействием, работающее в зависимости от положения тела пользователя, по п. 14, отличающееся тем, что первый датчик положения расположен между педалью и несущей рамой и выполнен с возможностью определения информации о нажатии педали.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| CN 104118507 A, 29.10.2014 | |||
| ТРАНСПОРТНЫЙ МОДУЛЬ | 2014 |
|
RU2570513C1 |

