ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка заявляет приоритет заявки на патент Китая №201510651451.6, поданной 10 октября 2015 г., и заявки на патент США №15/193856, поданной 27 июня 2016 г., полное содержание которых включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] Настоящее изобретение относится к транспортным средствам с человеко-машинным взаимодействием и, более конкретно, к транспортному средству с человеко-машинным взаимодействием, работающему в зависимости от углового положения пользователя.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0003] Транспортные средства с человеко-машинным взаимодействием, которые также называются транспортными средствами, работающими в зависимости от положения тела пользователя, или транспортными средствами с управлением от датчиков, обычно работают по основному принципу «динамической стабилизации». В корпусе транспортного средства с человеко-машинным взаимодействием гироскоп может взаимодействовать с акселерометром для определения изменения углового положения корпуса транспортного средства, причем система сервоуправления может точно управлять корпусом транспортного средства для регулировки его положения, тем самым осуществляя балансирование транспортного средства.
[0004] Транспортные средства с человеко-машинным взаимодействием обычно делятся на две категории: с рулем и без руля. В частности, транспортным средством с человеко-машинным взаимодействием и с рулем можно управлять для перемещения вперед, назад и выполнения поворотов за счет управления рулем. Транспортное средство с человеко-машинным взаимодействием без руля выполнено с возможностью перемещения вперед и назад за счет наклона корпуса транспортного средства и выполнения поворотов за счет поворота двух педалей ступнями пользователя. Одним примером транспортного средства с человеко-машинным взаимодействием без руля может быть двухколесное транспортное средство с человеко-машинным взаимодействием, описанное в заявке на патент Китая № CN 201320300947. Двухколесное транспортное средство содержит левую внутреннюю накладку и правую внутреннюю накладку, расположенные симметрично друг относительно друга. Левая внутренняя накладка соединена с возможностью поворота с правой внутренней накладкой.
[0005] Для приведения в движение двухколесного транспортного средства с человеко-машинным взаимодействием может потребоваться, чтобы две ступни располагались на левой внутренней накладке или правой внутренней накладке соответственно. Однако когда пользователь сидит или стоит на одной ступне, он может не иметь возможности эффективно управлять работой транспортного средства с человеко-машинным взаимодействием, что уменьшает удовольствие от управления.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Для решения вышеупомянутой задачи предлагается транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя.
[0007] Описывается транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя. Транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, может содержать корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства может содержать несущую раму, педаль, расположенную на несущей раме, первый датчик положения и контроллер. Первый датчик положения может быть выполнен с возможностью определения информации об угловом положении пользователя, стоящего на педали. Контроллер может быть выполнен с возможностью приведения колес во вращение в соответствии с информацией об угловом положении.
[0008] В несущей раме может быть предусмотрен один участок под педаль, обращенный от земли, причем педаль свободно расположена в участке под педаль.
[0009] Первый датчик положения может представлять собой датчик давления, который может определять информацию об угловом положении пользователя, стоящего на педали, путем определения давлений, оказываемых на разные части датчика давления.
[0010] Первый датчик положения может быть расположен между педалью и несущей рамой, причем педаль может поворачиваться относительно первого датчика положения таким образом, что противоположные стороны педали приближаются к несущей раме или удаляются от нее, соответственно.
[0011] Первый датчик положения может представлять собой гибкую конструкцию, выполненную с возможностью определения информации об угловом положении пользователя, стоящего на педали, путем определения степеней деформации при разных ориентациях гибкой конструкции.
[0012] Участок под педаль может представлять собой приемное углубление, утопленное внутрь несущей рамы. С каждой стороны педали может быть расположен выступ, обращенный к колесам и выполненный с возможностью поворота относительно корпуса транспортного средства.
[0013] Корпус транспортного средства может дополнительно содержать множество пружинных опор, расположенных между педалью и нижней частью приемного углубления.
[0014] Несущая рама может быть закрыта сверху педалью.
[0015] Несущая рама может представлять собой жесткий вал, причем противоположные стороны жесткого вала могут быть соединены с возможностью поворота с двумя колесами.
[0016] Первый датчик положения может быть расположен между педалью и несущей рамой и выполнен с возможностью определения угла поворота педали относительно жесткого вала.
[0017] Корпус транспортного средства может дополнительно содержать по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой.
[0018] Первый датчик положения может быть выполнен с возможностью определения деформации пружинных опор для определения информации об угловом положении пользователя, стоящего на педали.
[0019] Педаль может быть соединена с возможностью поворота с несущей рамой на валу, который расположен по существу перпендикулярно оси несущей рамы, обращенной к колесам, и делит ее напополам, причем первый датчик положения может быть выполнен с возможностью определения информации о повороте педали относительно оси несущей рамы.
[0020] Корпус транспортного средства может дополнительно содержать второй датчик положения, выполненный с возможностью определения угла наклона несущей рамы относительно земли. Контроллер может приводить транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, в движение вперед или назад на основании угла наклона, определенного вторым датчиком положения, и приводить в движение транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, для выполнения поворотов на основании информации о повороте, определенной первым датчиком положения.
[0021] Первый датчик положения может представлять собой шаровой манипулятор, подобный шаровому манипулятору мыши, расположенный в отсеке, образованном педалью и несущей рамой. Шаровой манипулятор может катиться в произвольных направлениях в отсеке, причем информация об угловом положении пользователя, стоящего на педали, может быть определена путем определения относительного положения шарового манипулятора относительно педали.
[0022] Два колеса могут быть установлены с возможностью вращения с противоположных сторон несущей рамы, причем плоскости двух колес могут быть параллельны друг другу.
[0023] Индуктивный переключатель может быть расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
[0024] Индуктивный переключатель может содержать датчик давления и фотоэлектрический датчик, оба из которых могут определять, нажата педаль или нет.
[0025] Корпус транспортного средства может дополнительно содержать источник питания и исполнительное устройство. Источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер. Контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации об угловом положении, определенной первым датчиком положения, для приведения колес во вращение.
[0026] Описывается другое транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя. Транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, может содержать корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства может содержать несущую раму, первый датчик положения и контроллер. Несущая рама может представлять собой цельную конструкцию и может быть соединена с колесами. В несущей раме может быть предусмотрен один участок под педаль. Первый датчик положения может быть выполнен с возможностью определения информации об угловом положении пользователя, стоящего на участке под педаль, причем контроллер может приводить колеса во вращение в соответствии с информацией об угловом положении.
[0027] Описывается еще одно транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя. Транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, может содержать корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства. Корпус транспортного средства может содержать несущую раму, педаль, расположенную на несущей раме, первый датчик положения и контроллер. Несущая рама может быть соединена с колесами. Первый датчик положения может быть выполнен с возможностью определения информации об угловом положении пользователя, стоящего на педали, путем определения перемещения педали, причем контроллер может приводить колеса во вращение в соответствии с информацией об угловом положении.
[0028] Вышеописанные транспортные средства с человеко-машинным взаимодействием, работающие в зависимости от углового положения пользователя, могут иметь следующие преимущества.
[0029] Транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, может определять информацию об угловом положении пользователя, стоящего на педали, и приводить колеса во вращение в соответствии с информацией об угловом положении. Точнее, пользователь по-прежнему может эффективно управлять транспортным средством с человеко-машинным взаимодействием, работающим в зависимости от углового положения пользователя, сидя или даже стоя на одной ступне, что повышает удовольствие от управления.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0030] Далее приводится ссылка на прилагаемые графические материалы, предназначенные для лучшей иллюстрации настоящего изобретения. Однако на прилагаемых графических материалах представлены только некоторые варианты осуществления настоящего изобретения, не имеющие ограничительного характера.
[0031] На фиг. 1 представлено изображение в разобранном виде транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления настоящего изобретения.
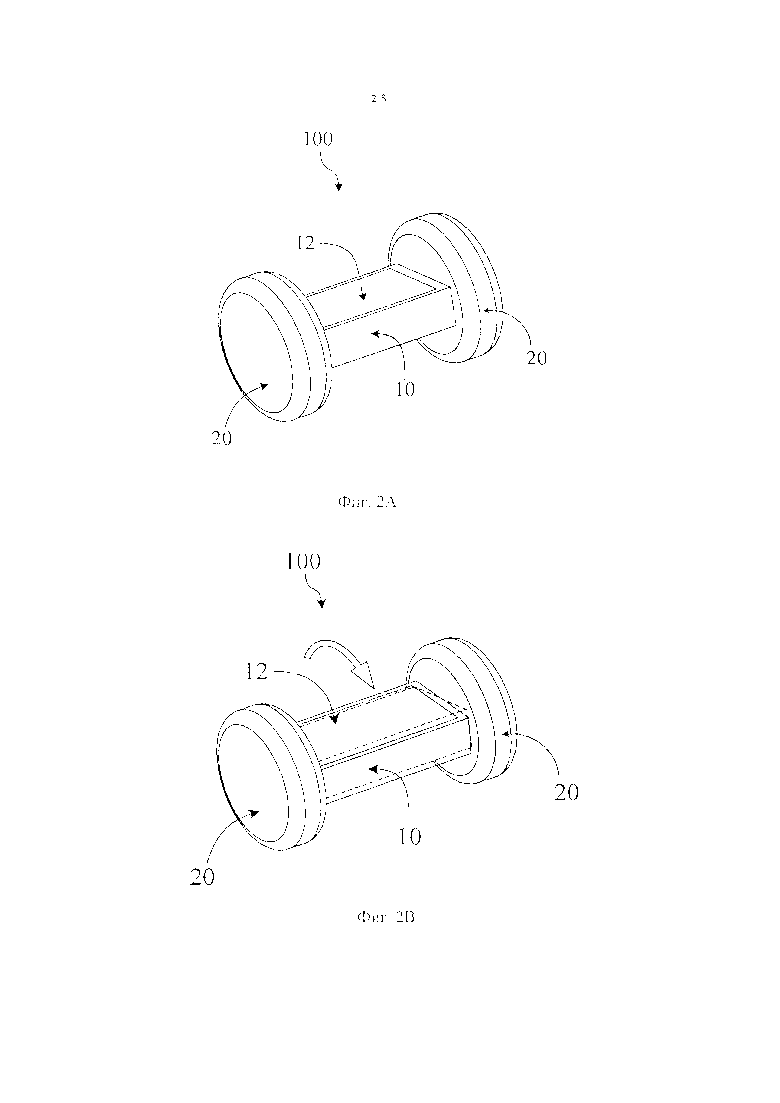
[0032] На фиг. 2А изображен вариант перемещения транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1, в котором транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, перемещается прямо вперед или назад с постоянной скоростью, причем корпус транспортного средства и педаль остаются в горизонтальном положении.
[0033] На фиг. 2В изображен другой вариант перемещения транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1, в котором транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, ускоряется при перемещении вперед при соответствующем наклоне вперед корпуса транспортного средства.
[0034] На фиг. 2С изображен еще один вариант перемещения транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1, в котором транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, ускоряется при перемещении назад при соответствующем наклоне назад корпуса транспортного средства.
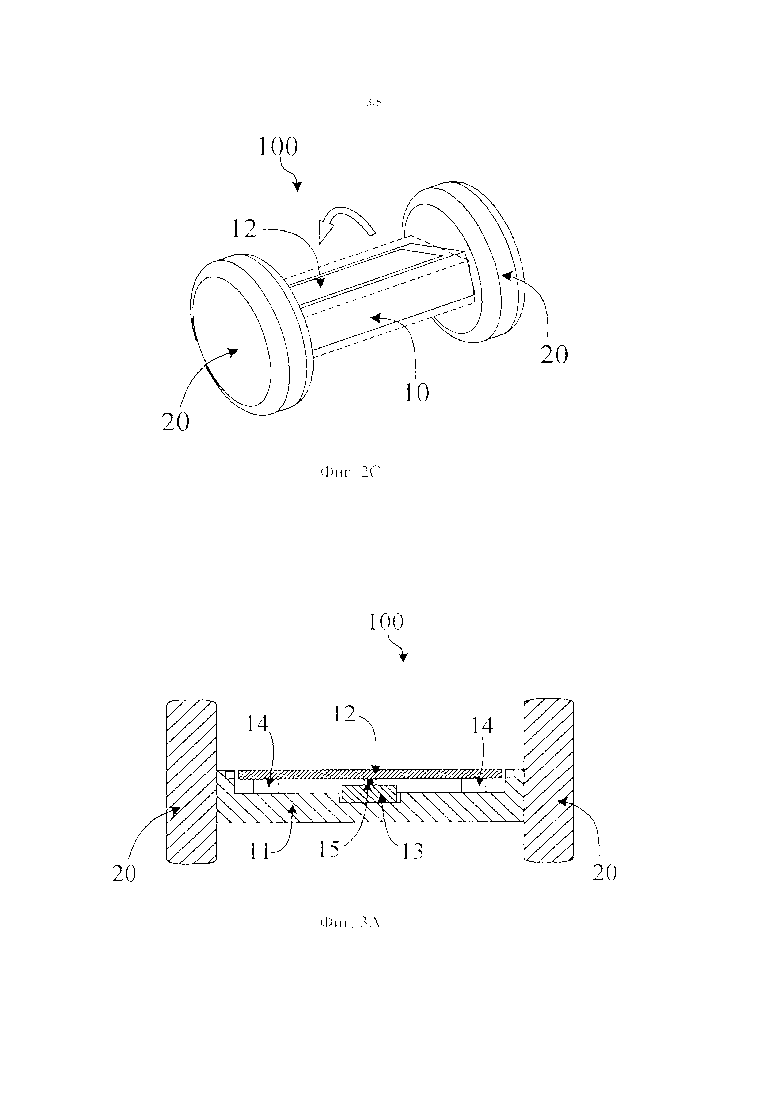
[0035] На фиг. 3А изображен вариант перемещения транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1, в котором транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, перемещается вперед или назад по прямой линии без поворотов.
[0036] На фиг. 3В изображен другой вариант перемещения транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1, в котором транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, поворачивает направо, если транспортное средство движется в направлении читателя, или поворачивает влево, если движется от него.
[0037] На фиг. 3С изображен еще один вариант перемещения транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1, в котором транспортное средство с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, поворачивает влево, если транспортное средство движется в направлении читателя, или поворачивает вправо, если движется от него.
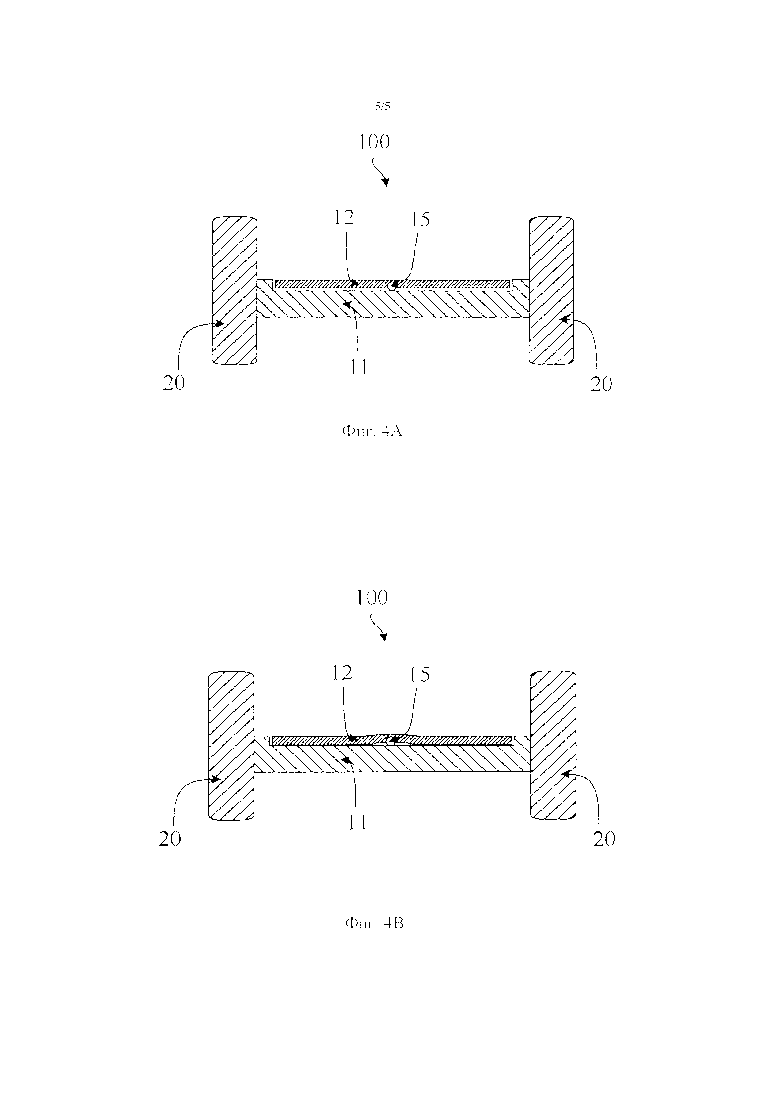
[0038] На фиг. 4А-4В изображены различные конфигурации транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1, в зависимости от формы педали.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0039] В последующем описании приведено наглядное и подробное пояснение настоящего изобретения в сочетании с вариантами осуществления и прилагаемыми графическими материалами. Разумеется, варианты осуществления, описанные в настоящем документе, представляют собой только часть, а не все варианты осуществления настоящего изобретения. Любые другие варианты осуществления, полученные специалистами в данной области техники без приложения изобретательских усилий, находятся в пределах объема правовой охраны настоящего изобретения.
[0040] Как показано на фиг. 1, транспортное средство 100 с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления настоящего изобретения содержит корпус 10 транспортного средства и два колеса 20, соединенные с корпусом 10 транспортного средства.
[0041] Как правило, плоскости двух колес 20 могут быть параллельны друг другу, и оси двух колес 20 могут быть расположены по существу на одной воображаемой прямой линии. Два колеса 20 могут быть установлены с противоположных сторон корпуса 10 транспортного средства посредством соответствующих осей. Например, два колеса 20 могут быть установлены с противоположных сторон корпуса 10 транспортного средства соответственно, или установлены с двух сторон под корпусом 10 транспортного средства. В этом варианте осуществления два колеса 20 могут быть соединены с возможностью вращения с противоположными сторонами корпуса 10 транспортного средства. Два колеса 20 выполнены с возможностью вращения относительно оси корпуса 10 транспортного средства, которая может по существу совпадать с вышеуказанной воображаемой прямой линией, тем самым обеспечивая перемещение транспортного средства 100 с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя.
[0042] Также как показано на фиг. 2А, 2В, 2С, 3А, 3В, 3С, корпус 10 транспортного средства может содержать несущую раму 11, педаль 12, расположенную на несущей раме 11, первый датчик 13 положения и контроллер 16. В несущей раме 11 может быть предусмотрен один участок под педаль, который обращен от земли. Педаль 12 может быть расположена в участке под педаль. Первый датчик 13 положения может определять информацию об угловом положении пользователя, стоящего на педали 12, и отправлять информацию об угловом положении на контроллер 16. Контроллер 16, таким образом, может управлять вращением колес 20 в соответствии с информацией об угловом положении, так, что пользователь может управлять транспортным средством 100 с человеко-машинным взаимодействием, работающим в зависимости от углового положения пользователя, для перемещения вперед (показано на фиг. 2В) и назад (показано на фиг. 2С), или выполнения поворотов (показано на фиг. 3В или фиг. 3С), например, поворота вправо или поворота влево. Информация об угловом положении может включать информацию о положении пользователя, стоящего на педали 12. В этом варианте осуществления несущая рама 11 может быть выполнена в виде цельной конструкции и соединена с возможностью поворота с двумя колесами 20. Под выражением «цельная конструкция» может подразумеваться, что составляющие части несущей рамы 11 не могут перемещаться друг относительно друга, вследствие чего несущая рама представляет собой по существу единую деталь, что отличается от решений из уровня техники тем, что в традиционном транспортном средстве с человеко-машинным взаимодействием левая внутренняя накладка может поворачиваться относительно правой внутренней накладки. Несущая рама 11 может быть выполнена в виде цельной конструкции посредством литья, сварки или заклепочного соединения. Несущая рама 11 может иметь любую форму, например жесткой пластинчатой конструкции или жесткого вала. В этом варианте осуществления несущая рама 11 может представлять собой жесткую пластинчатую конструкцию.
[0043] Педаль 12 может быть независимо установлена на несущей раме 11. Под выражением «независимо установлена» может подразумеваться, что педаль 12 не расположена неподвижно на несущей раме, но установлена на несущей раме с некоторой степенью свободы посредством промежуточных соединений, вследствие чего педаль 12 выполнена с возможностью перемещения относительно несущей рамы 11. Например, педаль 12 может быть соединена с возможностью поворота с несущей рамой 11 посредством вала 15, шарнира или карданного соединения. Если применяется вал 15 или шарнир, педаль 12 может поворачиваться только на валу 15 или оси шарнира относительно несущей рамы 11, в другом случае, если применяется карданное соединение, педаль 12 может поворачиваться относительно карданного соединения в произвольных направлениях. В обоих случаях управляющий сигнал может быть сгенерирован на основе поворота или перемещения педали 12 и, следовательно, отправлен на контроллер 16 для управления движением транспортного средства 100 с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя. Однако следует отметить, что соединение между педалью 12 и несущей рамой 11 никоим образом не ограничено вышеуказанными способами соединения - могут применяться любые соединения, посредством которых педаль 12 может перемещаться относительно несущей рамы 11. В этом варианте осуществления педаль 12 может быть соединена с возможностью поворота с несущей рамой 11 на валу 15, который по существу перпендикулярен вышеупомянутой оси несущей рамы 11 и делит ее пополам. Таким образом, когда пользователь стоит на педали 12, педаль 12 может поворачиваться относительно несущей рамы 11 для создания угла наклона влево или вправо. Педаль 12 может иметь любую форму. В этом варианте осуществления педаль 12 представляет собой цельную пластинчатую конструкцию. Как показано на фиг. 2В, 2С, 3В и 3С, транспортное средство с человеко-машинным взаимодействием перемещается вперед или назад, когда имеется первая разность высот на педали 12 вдоль вала 15, причем транспортное средство с человеко-машинным взаимодействием выполняет повороты, когда имеется вторая разность высот на педали 12 в направлении, перпендикулярном валу 15.
[0044] Первый датчик 13 положения может быть выполнен с возможностью определения информации об угловом положении пользователя, стоящего на педали 12. Следует понимать, что первый датчик 13 положения может управлять множеством видов движения колес 20, а не только вращением. Например, первый датчик 13 положения может определять угол наклона влево, угол наклона вправо, или разность вертикального положения противоположных сторон педали 12 (противоположные стороны относятся к сторонам, направленным к соответствующим колесам 20, причем разность вертикального положения может быть вычислена за счет принятия плоскости несущей рамы 11 в качестве опорной горизонтальной плоскости). Например, если угол наклона влево, угол наклона вправо или разность вертикального положения близка к нулю, транспортное средство 100 с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, будет перемещаться вперед или назад а по существу по прямой линии. Если угол наклона влево или разность вертикального положения относительно велики, транспортное средство 100 с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, может поворачивать влево. Конкретнее, величина угла наклона влево, угла наклона вправо или разности вертикального положения для инициации поворотного движения может зависеть от предпочтений пользователя. Например, некоторые пользователи могут предпочитать более чувствительный механизм инициации поворота, в таком случае величина инициации углов наклона или разности положения может быть установлена меньшей. Транспортное средство с человеко-машинным взаимодействием перемещается вперед или назад, когда имеется первый угол наклона между педалью 12 и воображаемой осью колес 20, причем транспортное средство с человеко-машинным взаимодействием выполняет повороты, когда имеется второй угол наклона между педалью 12 и валом 15.
[0045] Первый датчик 13 положения может представлять собой датчик положения любого типа, например, гироскоп, фотоэлектрический датчик или датчик давления. Место установки и количество первых датчиков 13 положения может быть произвольным в соответствии с фактическими конструкционными требованиями. Например, может быть предусмотрен один или несколько первых датчиков 13 положения. В этом варианте осуществления первый датчик 13 положения может представлять собой датчик давления, который может определять информацию об угловом положении пользователя, стоящего на педали 12, путем определения давлений, оказываемых на разные части первого датчика 13 положения. Первый датчик 13 положения может быть расположен между педалью 12 и несущей рамой 11. Например, первый датчик 13 положения может быть встроен в вал 15 или карданное соединение, на котором педаль 12 может поворачиваться, таким образом, что две противоположные стороны педали 12 могут приближаться к несущей раме 11 или удаляться от нее. Как правило, первый датчик 13 положения может представлять собой гибкую конструкцию, которая может определять информацию об угловом положении пользователя, стоящего на педали 12, путем определения степеней деформации при разных ориентациях первого датчика 13 положения. Соответственно, педаль 12 может поворачиваться относительно участка под педаль несущей рамы 11 таким образом, что первый датчик 13 положения может легко определять степени деформации при разных ориентациях на педали 12. Конкретнее, участок под педаль может представлять собой приемное углубление, которое утоплено внутрь несущей рамы 11. С каждой стороны педали 12 может быть расположен выступ (не показан), обращенный к соответствующим колесам 20. Выступы могут поворачиваться относительно корпуса 10 транспортного средства, вследствие чего педаль 12 может быть соединена с возможностью поворота с несущей рамой 11. Альтернативно участок под педаль также может представлять собой плоскую поверхность вместо приемного углубления; в этом случае несущая рама 11 может быть закрыта сверху педалью 12.
[0046] В первом датчике 13 положения также могут применяться другие подходы для определения информации об угловом положении пользователя, стоящего на педали 12. Например, две пружинные опоры 14 могут быть расположены между педалью 12 и несущей рамой 11. Первый датчик 13 положения может определять информацию об угловом положении пользователя, стоящего на педали 12, путем определения деформации пружинных опор 14. Альтернативно четыре пружинных опоры 14 могут быть расположены между педалью 12 и несущей рамой 11. Первый датчик 13 положения может быть расположен между четырех пружинных опор 14 и определять степени деформации пружинных опор 14, причем уравновешенное положение каждой пружинной опоры принимается в качестве исходного положения для измерений деформации. Под выражением «уравновешенное положение» может подразумеваться точная конфигурация или состояние каждой пружинной опоры, когда пользователь стоит на педали, и сила притяжения Земли, воздействующая на пользователя, уравновешена вертикальным компонентом усилия опоры или нормального усилия педали (в вертикальном направлении пользователь находится в состоянии равновесия, поскольку движение в вертикальном направлении отсутствует). Таким образом, пружинная опора будет в некоторой степени деформирована в ответ на давление, оказываемое пользователем на педаль, и точное состояние деформации каждой пружинной опоры будет учитываться как исходное состояние, на основании которого будут вычислены степени деформации для генерирования сигналов для управления движениями транспортного средства с человеко-машинным взаимодействием. В другом примере пользователь может наклониться вперед или назад, когда он стоит на педали 12, причем педаль 12 может быть соединена с возможностью поворота с несущей рамой 11 таким образом, что педаль 12 может поворачиваться относительно несущей рамы 11 вокруг оси несущей рамы 11, следовательно, педаль 12 будет наклоняться вперед или назад для образования угла наклона вперед или угла наклона назад относительно несущей рамы 11. Первый датчик 13 положения может определять информацию о повороте педали 12 относительно оси несущей рамы 11. Кроме того, корпус 10 транспортного средства может дополнительно содержать второй датчик положения (не показан), выполненный с возможностью определения информации о наклоне несущей рамы И относительно земли. Контроллер 16, таким образом, может приводить транспортное средство 100 с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, в движение вперед или назад на основании информации о наклоне, определенной вторым датчиком положения, и приводить в движение транспортное средство 100 с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, для выполнения поворотов на основании информации о повороте, определенной первым датчиком 13 положения. Альтернативно первый датчик 13 положения может представлять собой шаровой манипулятор (подобный шаровому манипулятору мыши), расположенный в отсеке между педалью 12 и несущей рамой 11. Шаровой манипулятор может катиться в любых направлениях. Информация об угловом положении пользователя, стоящего на педали 12, таким образом, может быть определена путем определения положения шарового манипулятора относительно педали 12.
[0047] На фиг. 2А-2С изображены различные варианты перемещения транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1. В варианте, показанном на фиг. 2А, транспортное средство 100 может перемещаться вперед или назад с постоянной скоростью, что может означать отсутствие ускорения, вследствие чего как корпус 10 транспортного средства, так и педаль 12 могут оставаться в горизонтальном положении (если предположить, что оно едет по горизонтальной земле). За счет того, что корпус 10 транспортного средства остается в горизонтальном положении, транспортное средство 100 может получать информацию о том, что водитель хочет, чтобы транспортное средство перемещалось с постоянной скоростью, вследствие чего транспортное средство может создавать тяговое усилие, которое уравновешивается трением с землей. Аналогично, за счет того, что педаль 12 остается в горизонтальном положении, транспортное средство 100 может получать информацию о том, чтобы сохранять направление своего перемещения без выполнения поворотов, т.е., для перемещения по прямой линии, вследствие чего два колеса 20, которые выполнены с возможностью перемещения независимо друг от друга, могут вращаться точно с одинаковой скоростью, таким образом, гарантируя перемещение транспортного средства всегда в одном и том же направлении и по прямой линии.
[0048] Транспортное средство 100 может перемещаться вперед или назад, например, транспортное средство 100, показанное на фиг. 2, перемещается вперед, когда корпус 10 транспортного средства в некоторой степени наклонен вперед. С одной стороны, за счет наклона корпуса 10 транспортного средства вперед (например, водитель может нажимать носком своей стопы вниз, таким образом, вызывая поворот корпус транспортного средства относительно оси двух колес 20 и, в результате, корпус 10 транспортного средства будет перемещаться из положения, обозначенного пунктирными линиями, в положение, обозначенное сплошными линиями, за счет чего создается первая разность высот на педали 12 вдоль вала 15 от сплошных линий к пунктирным линиям), транспортное средство 100 может получить сигнал на увеличение своей скорости и, таким образом, ускориться. С другой стороны, как в варианте, изображенном на фиг. 2А, за счет удержания педали 12 параллельно корпусу 10 транспортного средства, т.е. без поворота педали 12 относительно оси с симметрией по ширине (перпендикулярной оси колес), вследствие чего транспортное средство 100 может получать информацию о поддержании направления движения, т.е., оно не будет выполнять повороты, причем этого можно достичь за счет поддержания скоростей двух независимых колес согласованными, другими словами, два колеса будут двигаться с одной скоростью и будут ускоряться или замедляться синхронно. Аналогично, как показано на фиг. 2С, когда транспортное средство 100 двигается назад, корпус 10 транспортного средства может быть наклонен назад (перемещение из предыдущего положения, обозначенного пунктирными линиями, в текущее положение, обозначенное сплошными линиями, за счет чего создается другая первая разность высот на педали 12 вдоль вала 15 от сплошных линий к пунктирным линиям), чтобы отдать сигнал транспортному средству 100 на увеличение скорости при перемещении назад без выполнения поворотов. Следует отметить, что, когда транспортное средство 100 движется вперед, когда водитель обеспечивает наклон назад корпуса 10 транспортного средства, то транспортное средство может получить сигнал на замедление, то есть транспортное средство может снижать свою скорость при перемещении вперед до тех пор, пока не остановится.
[0049] На фиг. 3А-3С изображены разные варианты перемещения транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1. В варианте, показанном на фиг. 3А, транспортное средство 100 может двигаться вперед или назад (фактически, оно находится в том же состоянии движения, что и показанное на фиг. 2А). Предположим, что транспортное средство 100 движется вперед, и что направление движения вперед проходит к читателю, т.е., транспортное средство 100 движется к читателю, в таком случае, как в варианте, показанном на фиг. 2А, транспортное средство 100 может перемещаться вперед по прямой линии без выполнения поворотов. В варианте, показанном на фиг. 3В, между тем, водитель может нажать своей левой ступней на соответствующие пружинные опоры 14 (слева от водителя расположены две пружинные опоры 14) немного сильнее, чем правой ступней, таким образом вызывая поворот педали 12 относительно ее оси с симметрией по ширине, что приводит к оказанию различных давлений на пружинные опоры 14 и, таким образом, приводит к разным степеням деформации. Затем транспортное средство 100 может получить сигнал на поворот влево, причем это достигается путем приведения в движение двух независимых колес с разными скоростями; например, скорость левого колеса может быть снижена или скорость правого колеса может быть повышена, таким образом, обеспечивается обгон правым колесом левого колеса. Аналогично, как показано на фиг. 3С, за счет нажатия правой стороной педали 12 на соответствующие опоры 14 немного сильнее, чем левой стороной, и, таким образом, деформирования опор 14 на правой стороне в большей степени, чем на левой стороне, транспортное средство может получить сигнал на поворот вправо. Следует отметить, что по всем вариантам, показанным на фиг. 3А-3С, первый датчик 13 положения, встроенный внутрь вала 15, может использоваться для определения степени деформации этих пружинных опор 14, а также для генерирования и передачи возбуждающего сигнала на контроллер 16, на основании полученной информации о деформации, для перемещения транспортного средства 100 образом, который указывается возбуждающим сигналом. Как показано на фиг. 3В и 3С, транспортное средство 100 с человеко-машинным взаимодействием выполняет повороты, если имеется вторая разность высот на педали 12 вдоль направления, перпендикулярного валу 15.
[0050] В некоторых вариантах осуществления, когда несущая рама 11 представляет собой жесткий вал 15, противоположные стороны жесткого вала могут быть соединены с возможностью поворота с двумя колесами 20. В этом случае жесткий вал 15 может быть заключен в педали 12. Первый датчик 13 положения может быть расположен между педалью 12 и несущей рамой 11 и определять информацию об угловом положении пользователя, стоящего на педали 12, путем определения угла поворота педали 12 относительно жесткого вала 15.
[0051] В иллюстративном варианте осуществления корпус 10 транспортного средства 100 с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, может содержать индуктивный переключатель (не показан), расположенный в участке под педаль. Индуктивный переключатель может определять, нажата педаль 12 или нет, тем самым управляя вращением колес 20 или их остановкой. Конкретнее, транспортное средство 100 с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, может быть запущено только тогда, когда педаль 12 равномерно нажимает на индуктивный переключатель. За счет этого можно предотвратить травму пользователя, поскольку колеса 20 известного из уровня техники транспортного средства 100 с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, могут вращаться одновременно, когда пользователь стоит на педали 12. Кроме того, индуктивный переключатель может содержать датчик давления и фотоэлектрический датчик, оба из которых могут определять, нажата педаль 12 или нет.
[0052] Корпус 10 транспортного средства может дополнительно содержать источник питания (не показан) и исполнительное устройство (не показано). Источник питания может подавать электроэнергию на исполнительное устройство, первый датчик 13 положения и контроллер 16. Контроллер 16 может управлять источником питания, исполнительным устройством и первым датчиком 13 положения и отправлять возбуждающий сигнал на исполнительное устройство на основании информации о наклоне, определенной первым датчиком 13 положения и вторым датчиком положения, тем самым приводя колеса 20 во вращение. Как правило, корпус 10 транспортного средства может содержать два исполнительных устройства, соответственно установленных в два колеса 20 для управления соответствующими колесами 20.
[0053] На фиг. 4А показана другая конфигурация транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1. Как показано на фиг. 4А, педаль 12 может иметь плоскую верхнюю поверхность, причем между педалью 12 и корпусом 10 транспортного средства остается небольшой зазор, что более точно демонстрирует фактическую конфигурацию транспортного средства, поскольку педаль 12 может совершать только небольшие движения относительно корпуса 10 транспортного средства (т.е. поворачиваться на валу 15), и этих небольших движений будет достаточно для генерирования сигналов поворота, на основании которых транспортное средство 100 может выполнять повороты. Кроме того, большая часть вала 15 может быть заключена в педали 12. За счет конфигурации, предусматривающей небольшой зазор и заключенный вал, может быть дополнительно улучшена устойчивость транспортного средства. Первый датчик 13 положения может быть установлен в любом месте педали 12 или несущей рамы 11.
[0054] На фиг. 4 В показана другая конфигурация транспортного средства с человеко-машинным взаимодействием, работающего в зависимости от углового положения пользователя, в соответствии с иллюстративным вариантом осуществления, показанным на фиг. 1. Эта конфигурация отличается от фиг. 4А тем, что центральная часть педали 12 приподнята. Также, большая часть вала 15 может быть заключена в педали 12.
[0055] Следует отметить, что в конфигурациях, показанных на фиг. 4А-4В, первый датчик 13 положения может быть встроен в вал 15 и, таким образом, определять информацию об угловом положении водителя путем измерения движения педали 12 относительно вала 15.
[0056] В приведенном выше описании первый датчик 13 положения или второй датчик положения может содержать, но без ограничения, датчик Холла, оптический кодовый датчик или гироскоп, который может определять угол поворота педали 12 относительно несущей рамы 11 или угол поворота несущей рамы 11 относительно земли.
[0057] В заключение, транспортное средство 100 с человеко-машинным взаимодействием, работающее в зависимости от углового положения пользователя, может определять информацию об угловом положении пользователя, стоящего на педали 12, и приводить колеса 20 во вращение на основании информации об угловом положении. Точнее, пользователь по-прежнему может управлять транспортным средством 100 с человеко-машинным взаимодействием, работающим в зависимости от углового положения пользователя, сидя или даже стоя на одной ступне, что дополнительно повышает удовольствие от управления.
[0058] В описании выше приведены лишь иллюстративные варианты осуществления настоящего изобретения, которые не следует рассматривать как ограничивающие объем настоящего изобретения. Любые модификации, замены или усовершенствования, выполненные без отхода от сущности и идей настоящего изобретения, находятся в пределах объема правовой охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С ЧЕЛОВЕКОМАШИННЫМ ВЗАИМОДЕЙСТВИЕМ, РАБОТАЮЩЕЕ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ТЕЛА ПОЛЬЗОВАТЕЛЯ | 2016 |
|
RU2692412C1 |
| СИСТЕМА СИДЕНЬЯ ДЛЯ СНЕГОУПЛОТНИТЕЛЬНОЙ МАШИНЫ | 2014 |
|
RU2682201C1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| ЭЛЕКТРИЧЕСКОЕ БАЛАНСИРУЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2619683C1 |
| МЕХАНИЗМ КРЕПЛЕНИЯ ПЕДАЛЕЙ И ПЕДАЛЬНО-ШАТУННЫЙ УЗЕЛ | 2015 |
|
RU2680882C2 |
| Колесное транспортное средство с электрической системой управления | 2022 |
|
RU2782011C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2681993C2 |
| УСТРОЙСТВО СОЕДИНЕНИЯ ПЕРА РАМЫ, УЗЕЛ ШАРНИРНОГО КРОНШТЕЙНА И ВЕЛОСИПЕДНАЯ РАМА | 2015 |
|
RU2693393C2 |
| ВЕЛОСИПЕДНАЯ РАМА И ВЕЛОСИПЕД | 2015 |
|
RU2693893C2 |
| ВЕЛОСИПЕД И ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2683357C2 |


Изобретение относится к области машиностроения, в частности к транспортным средствам с человеко-машинным взаимодействием. Транспортное средство с человеко-машинным взаимодействием содержит корпус и два колеса, соединенные с корпусом. Корпус транспортного средства содержит несущую раму, вал, педаль, первый датчик положения, контроллер. Вал расположен перпендикулярно оси двух колес. Педаль соединена с возможностью поворота с несущей рамой на валу. Большая часть вала заключена в педали. Вал не соединен с двумя колесами. Первый датчик положения выполнен с возможностью определения информации об угловом положении пользователя, стоящего на педали. Контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации об угловом положении. Достигается повышение эффективности управления транспортным средством. 14 з.п. ф-лы, 9 ил.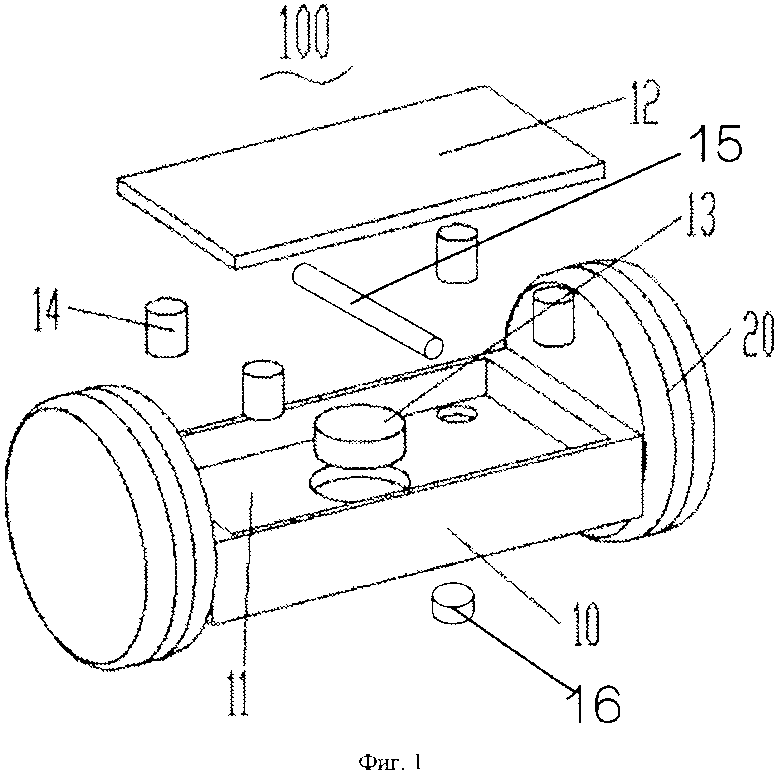
1. Транспортное средство с человеко-машинным взаимодействием, содержащее корпус транспортного средства и два колеса, соединенные с корпусом транспортного средства, причем корпус транспортного средства содержит:
несущую раму,
вал, расположенный, по существу, перпендикулярно оси двух колес,
педаль, соединенную с возможностью поворота с несущей рамой на валу,
первый датчик положения и
контроллер,
причем большая часть вала заключена в педали, причем вал не соединен с двумя колесами, причем первый датчик положения выполнен с возможностью определения информации об угловом положении пользователя, стоящего на педали, причем контроллер выполнен с возможностью приведения колес во вращение на основании определенной информации об угловом положении и транспортное средство с человеко-машинным взаимодействием выполнено с возможностью выполнения поворотов, когда педаль поворачивается на валу.
2. Транспортное средство с человеко-машинным взаимодействием по п. 1, отличающееся тем, что педаль расположена в одном участке под педаль, предусмотренном в несущей раме.
3. Транспортное средство с человеко-машинным взаимодействием по п. 2, отличающееся тем, что первый датчик положения содержит датчик давления, выполненный с возможностью определения информации об угловом положении пользователя, стоящего на педали, путем определения давлений, оказываемых на разные части датчика давления.
4. Транспортное средство с человеко-машинным взаимодействием по п. 2, отличающееся тем, что первый датчик положения расположен между педалью и несущей рамой, причем педаль поворачивается относительно первого датчика положения таким образом, что противоположные стороны педали приближаются к несущей раме или удаляются от нее, соответственно.
5. Транспортное средство с человеко-машинным взаимодействием по п. 4, отличающееся тем, что первый датчик положения содержит гибкую конструкцию, выполненную с возможностью определения информации об угловом положении пользователя, стоящего на педали, путем определения степеней деформации при разных ориентациях гибкой конструкции.
6. Транспортное средство с человеко-машинным взаимодействием по п. 5, отличающееся тем, что участок под педаль представляет собой приемное углубление, утопленное внутрь несущей рамы; причем с каждой стороны педали расположен выступ, обращенный к колесам и выполненный с возможностью поворота относительно корпуса транспортного средства.
7. Транспортное средство с человеко-машинным взаимодействием по п. 1, отличающееся тем, что несущая рама представляет собой жесткий вал, который заключен в педали, причем противоположные стороны несущей рамы соединены с возможностью поворота с двумя колесами.
8. Транспортное средство с человеко-машинным взаимодействием по п. 7, отличающееся тем, что первый датчик положения расположен между педалью и несущей рамой и выполнен с возможностью определения угла поворота педали относительно несущей рамы.
9. Транспортное средство с человеко-машинным взаимодействием по п. 2, отличающееся тем, что корпус транспортного средства дополнительно содержит по меньшей мере две пружинные опоры, расположенные между педалью и несущей рамой.
10. Транспортное средство с человеко-машинным взаимодействием по п. 2, отличающееся тем, что педаль соединена с возможностью поворота с несущей рамой на валу, который расположен по существу перпендикулярно оси несущей рамы, обращенной к колесам, и делит ее напополам, причем первый датчик положения выполнен с возможностью определения информации о повороте педали относительно оси несущей рамы.
11. Транспортное средство с человеко-машинным взаимодействием по п. 10, отличающееся тем, что корпус транспортного средства дополнительно содержит второй датчик положения, выполненный с возможностью определения угла наклона несущей рамы относительно земли, причем контроллер приводит транспортное средство с человеко-машинным взаимодействием в движение вперед или назад на основании угла наклона, определенного вторым датчиком положения, и управляет транспортным средством с человеко-машинным взаимодействием для выполнения поворотов на основании информации о повороте, определенной первым датчиком положения.
12. Транспортное средство с человеко-машинным взаимодействием по п. 2, отличающееся тем, что первый датчик положения представляет собой шаровой манипулятор, расположенный в отсеке между педалью и несущей рамой и выполненный с возможностью свободного перемещения в произвольных направлениях в отсеке, причем информация об угловом положении пользователя, стоящего на педали, определяется путем определения относительного положения шарового манипулятора относительно педали.
13. Транспортное средство с человеко-машинным взаимодействием по п. 1, отличающееся тем, что два колеса установлены с возможностью вращения на противоположных сторонах несущей рамы, причем плоскости двух колес по существу параллельны друг другу и центральная часть педали приподнята.
14. Транспортное средство с человеко-машинным взаимодействием по п. 1, отличающееся тем, что индуктивный переключатель расположен в участке под педаль и выполнен с возможностью определения того, нажата педаль или нет, для управления вращением колес или их остановкой.
15. Транспортное средство с человеко-машинным взаимодействием по п. 1, отличающееся тем, что корпус транспортного средства дополнительно содержит источник питания и исполнительное устройство, причем источник питания выполнен с возможностью подачи электроэнергии на исполнительное устройство, первый датчик положения и контроллер, причем контроллер выполнен с возможностью управления источником питания, исполнительным устройством и первым датчиком положения и отправки возбуждающего сигнала на исполнительное устройство на основании информации об угловом положении, определенной первым датчиком положения, для приведения колес во вращение.
| WO 2004108513 A1, 16.12.2004 | |||
| CN 104494750 A, 08.04.2015 | |||
| ОДНООСНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2333862C1 |

