Изобретение относится к бортовому элементу оптико-электронного оборудования, который может называться "элементом оборудования для постоянного наблюдения", для формирования изображений, наблюдения и/или указания целей, такому как, например, "блок" лазерного целеуказания. Изобретение также относится к способу, реализуемому посредством такого элемента оптико-электронного оборудования.
Элемент оптико-электронного оборудования для формирования изображений, наблюдения и/или указания целей, которым оснащается носитель (как правило, летательный аппарат), содержит один или более датчиков изображения, которые делают возможным получение изображений области, над которой пролетает носитель. По меньшей мере одно из этих изображений отображается на экране, чтобы предоставлять возможность оператору выполнять различные типы миссий: рекогносцировка и наблюдение, чтобы анализировать область и искать и идентифицировать конкретные элементы; атака для позиционирования и указания наземных или воздушных целей; или навигация для облегчения полета в трудных условиях, ночью или в плохую погоду (режим "FLIR" или "инфракрасной системы переднего обзора"). Если упомянутый элемент оборудования является "блоком" целеуказания, он также содержит лазерный источник и систему формирования луча, выполненную с возможностью направления лазерного луча на цель, ранее идентифицированную оператором по изображению, полученному посредством упомянутого датчика и отображенному посредством одного упомянутого экрана.
Эти элементы оборудования, известные из предшествующего уровня техники, проявляют некоторое число недостатков:
- в режиме обнаружения/целеуказания, поле изображения является очень небольшим, что делает трудным для оператора устанавливать связь между изображением, предоставленным элементом оптико-электронного оборудования, и тем, что он или она сам видит на земле (используется термин "эффект соломы", поскольку создается впечатление, что оператор смотрел через солому);
- видимость может быть нарушена погодными условиями (облака, туман и т.д.) или присутствием дыма, даже вследствие маскирования носителем или корпусом самого элемента оптико-электронного оборудования;
- формирование инфракрасных изображений показывает относительно низкое разрешение и монохромные изображения, тогда как цвет может быть важной частью информации, например, для распознавания цели;
- режимы FLIR и обнаружения могут быть взаимоисключающими;
- совместные миссии могут требовать отображения изображений, полученных посредством другого элемента оптико-электронного оборудования, встроенного на другом носителе; что требует высокоскоростной линии передачи данных для передачи данных, что не всегда доступно.
Изобретение преследует цель преодолеть по меньшей мере некоторые из этих недостатков. Для этого, оно предлагает использование, в дополнение к "реальным" датчикам изображения, то, что может быть названо "виртуальным датчиком". Последний содержит средства обработки данных, работающие совместно с базой данных геолокализованной местности, чтобы формировать "виртуальные" изображения, предназначенные сопровождать, дополнять или заменять "реальные" изображения, полученные посредством датчиков.
Средство обработки данных "виртуального датчика" может быть исключительно программным обеспечением. В этом случае оно будет подразумевать один или более модулей программного обеспечения, предназначенных исполняться процессором данных, который также обеспечивает другие функциональные возможности элемента оптико-электронного оборудования. Оно может быть исключительно аппаратными средствами: в этом случае будут подразумеваться одна или более специализированных - предпочтительно, цифровых - схем. Наконец, оно может быть гибридом, объединяющим модули программного обеспечения и специализированные схемы. База данных может быть локальной, в таком случае она хранится в памяти большой емкости (например, на твердотельном накопителе), расположенной на носителе или в элементе оптико-электронного оборудования, или быть удаленно доступной по линии радиосвязи.
Предметом изобретения, следовательно, является бортовой элемент оптико-электронного оборудования, содержащий:
- по меньшей мере один датчик изображения, выполненный с возможностью получения множества изображений области, над которой пролетает носитель упомянутого элемента оборудования; и
- процессор данных, сконфигурированный или запрограммированный с возможностью принимать по меньшей мере одно упомянутое полученное изображение и передавать его устройству отображения;
отличающийся тем, что упомянутый процессор данных также сконфигурирован или запрограммирован с возможностью:
- осуществлять доступ к базе данных изображений упомянутой области, над которой выполняется полет;
- извлекать из упомянутой базы данных информацию, делающую возможным синтез виртуального изображения упомянутой области, которое являлось бы видимым для наблюдателя, находящегося в предварительно определенной точке наблюдения и смотрящим, с предварительно определенным полем обзора, вдоль предварительно определенной линии визирования;
- синтезировать упомянутое виртуальное изображение; и
- передавать его упомянутому или другому устройству отображения.
Согласно различным вариантам осуществления такого элемента оптико-электронного оборудования:
- Упомянутая база данных может содержать, по меньшей мере: числовую модель местности упомянутой области; и множество орторектифицированных воздушных и спутниковых изображений или SAR упомянутой области, упомянутые изображения являются геолокализованными; упомянутый процессор данных сконфигурирован или запрограммирован с возможностью синтезировать упомянутое виртуальное изображение посредством проекции одного или более упомянутых воздушных или спутниковых изображений на упомянутую числовую модель местности.
- Упомянутая база данных может также содержать векторные картографические данные, упомянутый процессор данных сконфигурирован или запрограммирован с возможностью включать некоторые из упомянутых данных в упомянутое виртуальное изображение.
- Упомянутый процессор данных может быть сконфигурирован или запрограммирован с возможностью дополнять упомянутую базу данных изображениями, полученными посредством упомянутого или по меньшей мере одного упомянутого датчика изображения.
- Упомянутый процессор данных может быть сконфигурирован или запрограммирован с возможностью принимать от устройства геолокации информацию о позиции упомянутого носителя элемента оборудования или другого носителя, а также информацию, указывающую линию визирования датчика изображения, встроенного на этом носителе, и синтезировать виртуальное изображение, соответствующее упомянутой линии визирования и точке наблюдения, имеющей ту же позицию, что и упомянутый носитель. Более конкретно, упомянутый процессор данных может быть сконфигурирован или запрограммирован с возможностью отображать упомянутое виртуальное изображение вместо изображения, полученного посредством упомянутого встроенного датчика изображения, в случае маскирования или недостаточной видимости. Как вариант или в дополнение, упомянутый процессор данных может быть сконфигурирован или запрограммирован с возможностью объединять упомянутое виртуальное изображение и изображение, полученное посредством упомянутого встроенного датчика изображения, с одинаковой линией визирования и одинаковым полем обзора. Также в качестве варианта или в дополнение, упомянутый процессор данных может быть сконфигурирован или запрограммирован с возможностью синтезировать одно упомянутое виртуальное изображение, имеющее ту же точку наблюдения и ту же линию визирования, что и изображение, полученное посредством упомянутого встроенного датчика изображения, но с более широким полем обзора, и вставлять упомянутое изображение, полученное посредством упомянутого встроенного датчика изображения, в упомянутое виртуальное изображение. Аналогично, упомянутый процессор данных может быть сконфигурирован или запрограммирован с возможностью синтезировать множество упомянутых виртуальных изображений, соответствующих точкам обзора, близким к позиции датчика изображения, встроенного на упомянутом носителе, как определено посредством упомянутого устройства геолокации, и повторно вычислять упомянутую позицию посредством корреляции между изображением, полученным посредством упомянутого датчика, и упомянутыми виртуальными изображениями. Упомянутый процессор данных может также быть сконфигурирован или запрограммирован с возможностью: принимать от упомянутого или по меньшей мере одного упомянутого датчика изображения, встроенного на упомянутом носителе элемента оборудования, по меньшей мере одно изображение упомянутой области, над которой пролетает носитель упомянутого элемента оборудования, и отображать его на первом устройстве отображения, встроенном на упомянутом носителе; принимать, от другого носителя, информацию о позиции упомянутого носителя, а также о линии визирования и поле обзора по меньшей мере одного датчика изображения, встроенного на упомянутом другом носителе; синтезировать виртуальное изображение, соответствующее упомянутой линии визирования и точке наблюдения, имеющей упомянутую позицию, и отображать его на втором устройстве отображения, отличном от упомянутого первого устройства отображения и встроенном на упомянутом носителе элемента оборудования.
- Элемент оптико-электронного оборудования может также содержать встроенное устройство хранения данных, в котором хранится упомянутая база данных.
- Упомянутый процессор данных может быть сконфигурирован или запрограммирован с возможностью приводить в действие упомянутый или по меньшей мере один упомянутый датчик изображения для того, чтобы получать по меньшей мере одно упомянутое изображение упомянутой области, над которой выполняется полет, согласно линии визирования и с полем обзора, которые определены.
- Упомянутый элемент оптико-электронного оборудования может быть бортовым элементом оптико-электронного оборудования для указания целей.
Другим предметом изобретения является способ, реализуемый посредством такого элемента оптико-электронного оборудования, содержащий следующие этапы, на которых:
- принимают от устройства геолокации информацию о позиции носителя элемента оборудования или другого носителя, а также информацию, указывающую линию визирования датчика изображения, встроенного на этом носителе;
- осуществляют доступ к базе данных изображений упомянутой области, над которой выполняется полет, и извлекают из нее информацию, делающую возможным синтез виртуального изображения, соответствующего упомянутой линии обзора и точке наблюдения, имеющей ту же позицию, что и упомянутый носитель;
- синтезируют упомянутое виртуальное изображение; и
- передают его устройству отображения.
Другие признаки, детали и преимущества изобретения станут очевидны при прочтении описания, данного со ссылкой на присоединенные чертежи, предоставленные в качестве примера, и которые представляют, соответственно:
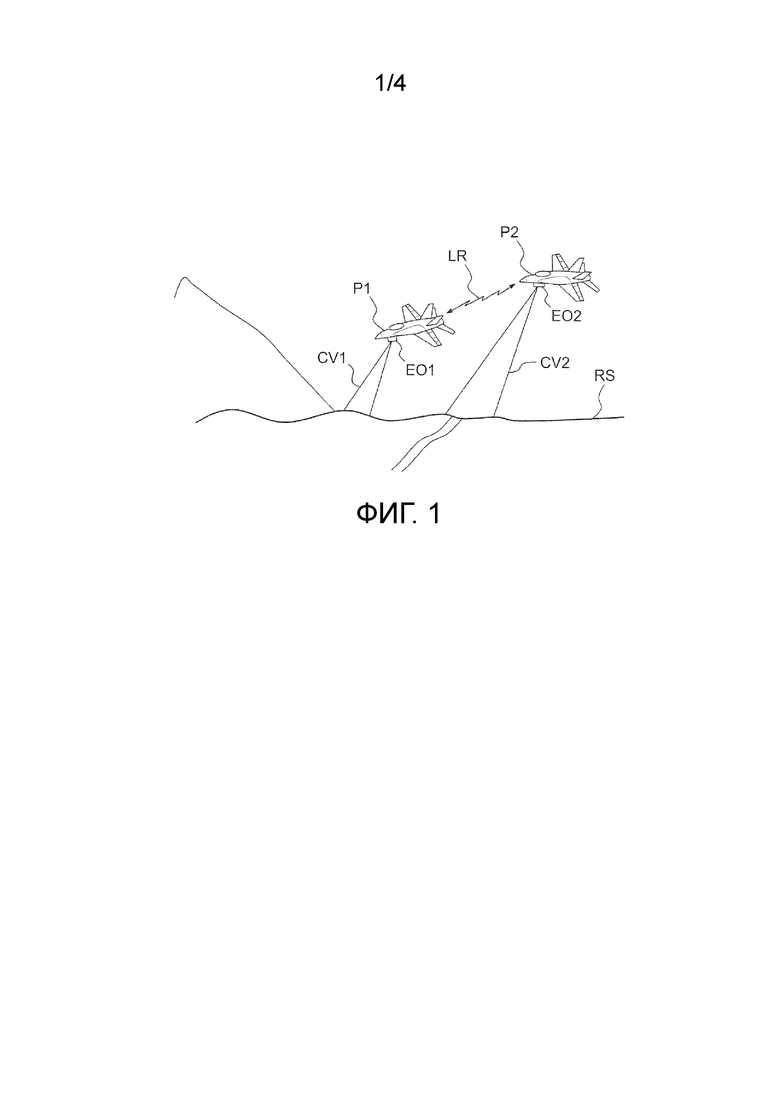
- фиг. 1, два летящих над областью самолета-истребителя, связывающихся по линии радиосвязи, и каждый несет элемент оптико-электронного оборудования согласно варианту осуществления изобретения;
- фиг. 2, функциональная схема элемента оптико-электронного оборудования согласно варианту осуществления изобретения;
- фиг. 3, использование элемента оптико-электронного оборудования согласно варианту осуществления изобретения, чтобы отображать, поочередно, реальное изображение или виртуальное изображение;
- фиг. 4, использование элемента оптико-электронного оборудования согласно варианту осуществления изобретения для отображения реального изображения и виртуального изображения, которые объединены;
- фиг. 5, использование элемента оптико-электронного оборудования согласно варианту осуществления изобретения для отображения реального изображения, вставленного в виртуальное изображение с более широким полем обзора;
- фиг. 6, использование элемента оптико-электронного оборудования согласно варианту осуществления изобретения для одновременного отображения реального изображения и виртуального изображения, соответствующего другой точке наблюдения в контексте совместной миссии; и
- фиг. 7, использование элемента оптико-электронного оборудования согласно варианту осуществления изобретения для выполнения операции корректировки позиции носителя посредством корреляции изображения.
Фиг. 1 иллюстрирует контекст использования элемента оптико-электронного оборудования согласно изобретению. Она представляет два самолета-истребителя (носителя) P1 и P2, каждый оборудован элементом EO1, EO2 оптико-электронного оборудования согласно варианту осуществления изобретения. Эти элементы оборудования содержат датчики изображений, наблюдающие за областью RS, над которой пролетают носители, с соответствующими полями обзора CV1, CV2. Два носителя - и, если необходимо, их элементы оптико-электронного оборудования - связываются по линии LR радиопередачи данных, предоставляющей возможность выполнять совместную миссию.
Фиг. 2 показывает функциональную схему элемента EO оптико-электронного оборудования согласно варианту осуществления изобретения, или только его "формирующей изображение" части (средство указания цели, которое может присутствовать, не представлено). Традиционно, этот элемент оборудования содержит три основные части:
-Один или более датчиков изображений, например, камеру, работающую в видимой части спектра, CI1, и инфракрасную камеру CI2. Ссылки IMR1 и IMR2 указывают изображения (называемые "реальными изображениями" ниже в данном документе), полученные посредством этих датчиков, или, более точно, цифровые данные, представляющие эти изображения, передаваемые посредством электронных сигналов.
-Человеко-машинный интерфейс IHM, содержащий один или более экранов EA отображения и/или другие устройства отображения, такие как проекционные видоискатели, предоставляющие возможность оператору просматривать изображения, а также средства MC управления (кнопки, клавиатуры, сенсорные экраны и т.д.), предоставляющие возможность упомянутому оператору вводить команды и рабочие параметры элемента оборудования. Например, средство MC управления может предоставлять возможность оператору выбирать датчик изображения, его ориентацию и его поле обзора, и экран EA отображает в реальном времени изображения, полученные посредством этого датчика.
-Процессор PD данных, содержащий один или более компьютеров и/или специализированных электронных схем. Процессор данных приводит в действие исполнительные механизмы, обеспечивающие ориентацию, фокусировку и настройку датчиков CI1, CI2 изображений в соответствии с командами, введенными оператором: он принимает изображения IMR1, IMR2, полученные посредством этих датчиков, если необходимо выполняет различные процессы по этим изображениям и обеспечивает их отображение посредством экрана или экранов EA.
Опять же традиционно элемент EO оптико-электронного оборудования также содержит блок UGL геолокации, типа AHRS (курсовертикаль), делающий возможным определение позиции носителя и точной позиции линии визирования, возможно используя данные от системы GNSS (глобальной навигационной спутниковой системы) и/или инерционных данных, происходящих от блока носителя, и устройство TxRx связи, делающее возможным передачу и прием данных по линии LR радиосвязи. В варианте блок геолокации и/или устройство связи может быть внешним по отношению к элементу оптико-электронного оборудования и сконфигурирован, чтобы связываться с ним.
Элемент EO оптико-электронного оборудования также содержит виртуальный датчик, который, в варианте осуществления на фиг. 2, состоит из базы данных BD, хранящейся во встроенной памяти большой емкости и посредством модуля программного обеспечения, исполняемого процессором PD данных. Как упомянуто выше, могут быть рассмотрены другие варианты осуществления: например, база данных может быть доступна удаленно вместо того, чтобы быть встроенной, и модуль программного обеспечения может быть заменен целиком или частично специализированными электронными схемами, формирующими часть процессора данных.
База данных BD содержит числовую модель местности области RS, над которой пролетает носитель, типично DTED-типа, и множество геолокализованных изображений упомянутой области. Изображения могут иметь различные источники; они могут, в частности быть:
- орторектифицированными спутниковыми изображениями;
- орторектифицированными мультиспектральными изображениями воздушной разведки;
- изображениями, полученными ранее посредством самого элемента оптико-электронного оборудования или посредством других бортовых элементов оптико-электронного оборудования;
- SAR-изображениями (радар с синтезированной апертурой);
База данных может также содержать географические векторные данные, как правило, VMAP-типа: дорожную и железнодорожную сеть, гидрологическую систему, географические названия и т.д.
Важно отметить, что элемент оптико-электронного оборудования может в реальном времени дополнять базу данных изображениями, которые он получает во время каждой миссии. Таким образом, представляется возможным обеспечивать "свежесть" данных, сохраненных в базе.
Модуль программного обеспечения принимает в качестве входных данных следующую информацию:
- позицию, которая может быть позицией носителя, определенной посредством блока UGL геолокации, позицию другого носителя, принятую через устройство TxRx связи, или произвольную позицию;
- линию визирования, которая может быть коллинеарна с линией визирования одного из "реальных" датчиков элемента оптико-электронного оборудования - или с линией визирования такого элемента оборудования другого носителя, или иначе управляться пилотом или по внешнему заданному значению;
- желаемое поле обзора, которое может соответствовать полю обзора одного из "реальных" датчиков элемента оптико-электронного оборудования или полю обзора датчика такого элемента оборудования другого носителя, или иначе быть произвольным; и
- необязательно, список географической информации, которая должна быть отображена (названия дорог, мест и т.д.).
Из этой информации и информации (числовой модели, изображений), сохраненной в базе данных, модуль программного обеспечения формирует виртуальное изображение IMV, которое соответствует изображению, которое будет получено посредством реального датчика, имеющего желаемые позицию, ориентацию (линию визирования) и поле обзора. Типично, виртуальное изображение формируется или синтезируется посредством проекции одного или более изображений из базы данных на упомянутую числовую модель местности. Компьютерные технологии, которые предоставляют возможность синтеза такого виртуального изображения, хорошо известны специалистам в области техники.
Представляется возможным рассматривать несколько различных использований виртуального изображения, полученного таким образом. Некоторые из них будут описаны ниже в данном документе со ссылкой на фиг. 3-7.
Как иллюстрировано на фиг. 3, процессор PD данных может выбирать, для отображения на экране EA, либо реальное изображение IMR, либо виртуальное изображение IMV, соответствующее одной и той же точке наблюдения (или точке обзора), одной и той же линии визирования и одному и тому же полю обзора. Выбор изображения, которое должно быть отображено, может быть сделан оператором, или автоматически процессором данных, например, если существует маскирование реального изображения.
Как иллюстрировано на фиг. 4, процессор PD данных может объединять реальное изображение IMR и виртуальное изображение IMV, соответствующее одинаковой точке наблюдения, одинаковой линии визирования и одинаковому полю обзора, чтобы формировать дополненное изображение, в соответствии с "дополненной реальностью", которое отображается на экране EA. В примере на фиг. 4 виртуальное изображение содержит цветовую информацию (представленную, на чертеже, штриховками), которая отсутствует в реальном изображении IMR, а также географическую информацию (высоту двух гор); с другой стороны, только реальное изображение IMR делает возможным обзор эфемерного явления, в этом случае присутствие облака. Дополненное изображение делает возможным отображение всей этой информации в одно и то же время.
Реальное изображение IMR с небольшим полем обзора может также быть вставлено в виртуальное изображение IMV с широким полем обзора, чтобы избегать вышеупомянутого "эффекта соломы". Эта ситуация иллюстрируется на фиг. 5, где реальное изображение IMR, показывающее здание в городской среде, вставляется в виртуальное изображение IMV с более широким полем обзора для того, чтобы быть помещенным в его контекст (полосы дорог, другие здания, служащие в качестве ориентиров и т.д.). Очевидно, виртуальное изображение может также отображать географические данные, упрощающие идентификацию здания, которое может, в военном применении, быть целью, которая должна быть указана. Если необходимо, изображение с небольшим полем обзора, вставленное в виртуальное изображение с более широким полем обзора, может быть дополненным изображением, полученным посредством объединения реального изображения и виртуального изображения (см. фиг. 4).
Фиг. 6 показывает применение, в котором реальное изображение IMR, полученное посредством датчика CI элемента оптико-электронного оборудования, отображается на первом экране EA1. В то же время, виртуальное изображение IMV отображается на втором экране EA2 или на том же экране посредством переключения или посредством вставки; это виртуальное изображение соответствует точке наблюдения, линии визирования поля обзора датчика изображения элемента оптико-электронного оборудования другого носителя (если необходимо, это может даже быть виртуальный датчик, этот вариант может быть использован, в частности, в тренировочных целях), эти данные принимаются устройством TxRx связи. В свою очередь, устройство связи может быть использовано, чтобы передавать данные такого же типа элементу оптико-электронного оборудования, встроенному на упомянутом другом носителе. В контексте совместной миссии на фиг. 1 это применение предоставляет возможность пилоту самолета P1 видеть, что видит пилот самолета P2, и наоборот. Будет отмечено, что, в противоположность предшествующему уровню техники, это не требует высокоскоростной линии связи. В действительности, не нужно передавать изображения от одного носителя другому, а необходимы только "контекстные данные" (позиция, линия визирования, настроечные параметры датчика или датчиков изображения), предоставляющие возможность синтеза виртуального изображения.
Элемент оптико-электронного оборудования может также быть использован, чтобы уточнять или корректировать позицию, определенную посредством блока UGL геолокации. Как иллюстрировано на фиг. 7, блок геолокации определяет первую оценку позиции датчика изображения, встроенного на упомянутом носителе, и процессор PD данных синтезирует множество виртуальных изображений IMV1, IMV2, VI3 … IMVN, соответствующих точкам наблюдения, близким к этой оцениваемой позиции (т.е., окружающих упомянутую позицию и находящихся в пределах радиуса, определенного вокруг нее) с определенной линией визирования. Упомянутый датчик изображения получает реальное изображение IMR с той же линией визирования. Затем, процессор данных определяет новую оценку позиции посредством корреляции между реальным изображением и виртуальными изображениями.
Другие применения элемента оптико-электронного оборудования согласно изобретению будет возможно рассмотреть без отступления от рамок настоящего изобретения.



Изобретение относится к бортовому элементу оптико-электронного оборудования. Технический результат – улучшение видимости, где пилот самолета Р1 видит, что видит пилот самолета Р2, и наоборот. Для этого получают множество изображений (IMR1, IMR2) области (RS), над которой пролетает носитель (PO1, PO2) упомянутого элемента оборудования; принимают по меньшей мере одно полученное изображение и передают его устройству (EA) отображения; осуществляют доступ к базе данных (BD) изображений области RS, над которой выполняется полет; извлекают из базы BD информацию, делающую возможным синтез виртуального изображения (IMV) упомянутой области, которое было бы видимым наблюдателю, находящемуся в предварительно определенной точке наблюдения и смотрящему, с предварительно определенным полем обзора, вдоль предварительно определенной линии визирования; синтезируют упомянутое виртуальное изображение и передают его упомянутому или другому устройству отображения. 2 н. и 12 з.п. ф-лы, 7 ил.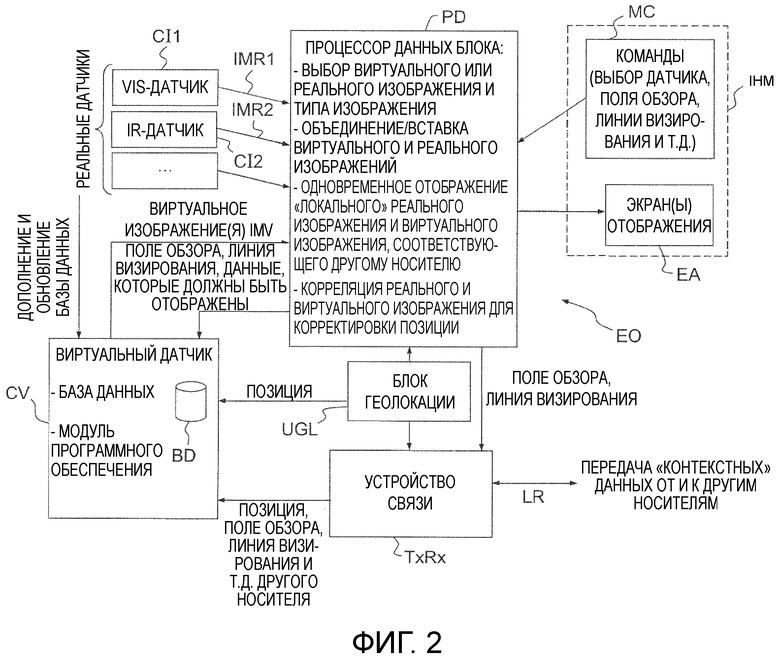
1. Бортовой элемент (EO, EO1, EO2) оптико-электронного оборудования, содержащий:
- по меньшей мере один датчик (CI1, CI2) изображения, выполненный с возможностью получения множества изображений (IMR1, IMR2) области (RS), над которой пролетает носитель (PO1, PO2) упомянутого элемента оборудования; и
- процессор (PD) данных, сконфигурированный или запрограммированный с возможностью принимать по меньшей мере одно упомянутое полученное изображение и передавать его устройству (EA) отображения;
отличающийся тем, что упомянутый процессор данных также сконфигурирован или запрограммирован с возможностью:
- осуществлять доступ к базе данных (BD) изображений упомянутой области, над которой выполняется полет;
- извлекать из упомянутой базы данных информацию, делающую возможным синтез виртуального изображения (IMV) упомянутой области, которое было бы видимым наблюдателю, находящемуся в предварительно определенной точке наблюдения и смотрящему, с предварительно определенным полем обзора, вдоль предварительно определенной линии визирования;
- синтезировать упомянутое виртуальное изображение и
- передавать его упомянутому или другому устройству отображения.
2. Бортовой элемент оптико-электронного оборудования по п. 1, в котором упомянутая база данных содержит, по меньшей мере:
- цифровую модель местности упомянутой области и
- множество орторектифицированных воздушных или спутниковых изображений или радара с синтезированной апертурой (SAR) упомянутой области, причем упомянутые изображения являются геолокализованными;
и в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью синтезировать упомянутое виртуальное изображение посредством проекции одного или более упомянутых воздушных или спутниковых изображений на упомянутую цифровую модель местности.
3. Бортовой элемент оптико-электронного оборудования по любому из предшествующих пунктов, в котором упомянутая база данных также содержит векторные картографические данные и в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью включать некоторые из упомянутых данных в упомянутое виртуальное изображение.
4. Бортовой элемент оптико-электронного оборудования по любому из предшествующих пунктов, в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью дополнять упомянутую базу данных изображениями, полученными посредством упомянутого или по меньшей мере одного упомянутого датчика изображения.
5. Бортовой элемент оптико-электронного оборудования по любому из предшествующих пунктов, в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью принимать от устройства геолокации (UGL) информацию о позиции упомянутого носителя элемента оборудования или другого носителя, а также информацию, указывающую линию визирования датчика изображения, встроенного на этом носителе, и синтезировать виртуальное изображение, соответствующее упомянутой линии визирования и точке наблюдения, имеющей ту же позицию, что и упомянутый носитель.
6. Бортовой элемент оптико-электронного оборудования по п. 5, в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью отображать упомянутое виртуальное изображение вместо изображения, полученного посредством упомянутого встроенного датчика изображения в случае маскирования или недостаточной видимости.
7. Бортовой элемент оптико-электронного оборудования по любому из пп. 5 или 6, в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью объединять упомянутое виртуальное изображение и изображение, полученное посредством упомянутого встроенного датчика изображения, с одинаковой линией визирования и одинаковым полем обзора.
8. Бортовой элемент оптико-электронного оборудования по любому из пп. 5-7, в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью синтезировать одно упомянутое виртуальное изображение, имеющее ту же точку наблюдения и ту же линию визирования, что и изображение, полученное посредством упомянутого встроенного датчика изображения, но более широкое поле обзора, и вставлять упомянутое изображение, полученное посредством упомянутого встроенного датчика изображения, в упомянутое виртуальное изображение.
9. Бортовой элемент оптико-электронного оборудования по любому из пп. 5-8, в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью синтезировать множество упомянутых виртуальных изображений, соответствующих точкам обзора, близким к позиции датчика изображения, встроенного на упомянутом носителе, как определено посредством упомянутого устройства геолокации, и повторно вычислять упомянутую позицию посредством корреляции между изображением, полученным посредством упомянутого датчика, и упомянутыми виртуальными изображениями.
10. Бортовой элемент оптико-электронного оборудования по любому из пп. 5-9, в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью:
- принимать от упомянутого или по меньшей мере одного упомянутого датчика изображения, встроенного на упомянутом носителе элемента оборудования, по меньшей мере одно изображение упомянутой области, над которой пролетает носитель упомянутого элемента оборудования, и отображать его на первом устройстве отображения, встроенном на том же носителе;
- принимать от другого носителя информацию о позиции упомянутого носителя, а также о линии визирования и поле обзора по меньшей мере одного датчика изображения, встроенного на упомянутом другом носителе;
- синтезировать виртуальное изображение, соответствующее упомянутой линии визирования и точке наблюдения, имеющей упомянутую позицию, и отображать его на втором устройстве отображения, отличном от упомянутого первого устройства отображения и встроенном на упомянутом носителе элемента оборудования.
11. Бортовой элемент оптико-электронного оборудования по любому из предшествующих пунктов, также содержащий встроенное устройство хранения данных, в котором хранится упомянутая база данных.
12. Бортовой элемент оптико-электронного оборудования по любому из предшествующих пунктов, в котором упомянутый процессор данных сконфигурирован или запрограммирован с возможностью приводить в действие упомянутый или по меньшей мере один упомянутый датчик изображения, чтобы он получал по меньшей мере одно упомянутое изображение упомянутой области, над которой осуществляется полет, согласно линии визирования и с полем обзора, которые определены.
13. Бортовой элемент оптико-электронного оборудования по любому из предшествующих пунктов для указания наземных и воздушных объектов, являющихся целями.
14. Способ формирования изображений, реализуемый посредством элемента оптико-электронного оборудования по любому из предшествующих пунктов, содержащий следующие этапы, на которых:
- принимают от устройства (UGL) геолокации информацию о позиции одного из носителей упомянутого элемента оборудования (PO1, PO2), а также информацию, указывающую линию визирования датчика изображения, встроенного на этом носителе;
- осуществляют доступ к базе данных (BD) изображений упомянутой области, над которой выполняется полет, и извлекают из нее информацию, делающую возможным синтез виртуального изображения (IMV), соответствующего упомянутой линии визирования и точке наблюдения, имеющей ту же позицию, что и упомянутый носитель;
- синтезируют упомянутое виртуальное изображение и
- передают его устройству (EA) отображения.
| HOLLERER T | |||
| et al.: "Telegeoinformatics: Location-Based Computing and Services | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| PASMAN W | |||
| et al.: "Accurate overlaying for mobile augmented reality", COMPUTERS AND GRAPHICS, ELSEVIER, N6, 01.12.1999 | |||
| AZUMA R.: "A Survey of Augmented Reality", PRESENCE: TELEOPERATORS AND VIRTUAL ENVIRONMENTS, N4, 01.08.1997 | |||
| Способ сушки и консервирования дерева | 1933 |
|
SU39960A1 |
| LIVINGSTON M | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |

