Изобретение относится к электроэнергетике и электротехнике, а именно к релейной защите синхронной электрической машины, генератора или электродвигателя. Изобретение предназначено для реализации средствами цифровой техники.
Электрическая машина нуждается в защите от разнообразных повреждений: междуфазных коротких замыканий, межвитковых замыканий в обмотках статора и ротора, пробоя изоляции на корпус также в обеих частях, в случае генератора - от перехода в двигательный режим. На протяжении всей истории развития электроэнергетики сложился такой общий способ защиты электрической машины, в котором за каждый вид повреждения несет ответственность отдельный частный способ - дифференциальный, дистанционный, отдельные способы защиты от замыканий витков обмотки ротора, от замыканий обмотки статора на землю[1].
Современные терминалы релейной защиты проводят цифровую запись наблюдаемых электрических величин. Возникает вопрос, как наиболее эффективно распорядиться имеющейся информационной базой, включающей в себя не только цифровые осциллограммы протекающих процессов, но и априорную информацию о защищаемом объекте, в данном случае - синхронной электрической машине. Априорная информация в наиболее общем плане представлена в алгоритмической модели объекта, учитывающей его структуру и параметры, но с одной существенной оговоркой: в предположении, что объект не поврежден. Ни от какой модели, подготовленной к использованию в реальном времени, нельзя требовать учета всего многообразия возможных повреждений объекта. Модель неповрежденного объекта от подобных требований освобождена, и по отношению к повреждениям инвариантна. Возникает задача придания модели неповрежденного объекта свойств индикатора повреждения [2].
Известны технические решения, дающие принципиальное решение данной задачи [3,4]. В их основе лежит понятное соображение. Наблюдатель энергообъекта регистрирует и накапливает в памяти такой объем информации, что он превосходит минимум, достаточный для активирования модели неповрежденного объекта. Избыток информации позволяет судить о том, поврежден ли он на самом деле или есть основание подозревать повреждение.
Существуют технические признаки, универсальные для способа защиты любого энергообъекта. Это регистрация (цифровое осциллографирование) токов и напряжений на его зажимах, использование модели неповрежденного объекта, активирование модели источниками наблюдаемых электрических величин, преобразование выходной величины алгоритмической модели в двухкоординатный замер, задания на плоскости замера области локализации режимов, альтернативных повреждениям защищаемого объекта. В процессе эксплуатации релейной защиты область локализации используется для блокирования защиты. Наблюдаемый режим отображают на плоскости замера и производят срабатывание защиты при условии, что отображение режима окажется вне блокирующей области.
Наблюдаемые величины изменяются во времени. Обычно в них присутствует синусоидальная составляющая. Если она может быть выделена с необходимой точностью, то информацию переводят в простейший комплексный базис. В таком случае двухкоординатный замер представляет собой комплексную величину, отображаемую на комплексной плоскости. Но во временном базисе, наиболее общем, преобразование в двухкоординатный замер - общий технический признак, нуждающийся в детализации, учитывающей специфику энергообъектов, в данном случае синхронных электрических машин.
Известен способ защиты генератора [5], основанный на применении алгоритмической модели синхронной электрической машины. Согласно этому способу наблюдают токи и напряжения на выводах машины. Используют ее алгоритмическую модель в неповрежденном состоянии, которую активируют источниками, совпадающими с некоторыми из наблюдаемых величин. Реакцию модели, т.е. ее выходную величину, преобразуют в замер, определяемый двумя сигналами (координатами).
Указанный способ защиты генератора распространяется на синхронную электрическую машину. Тем не менее, его недостатком являются ограниченные функциональные возможности. Дело в том, что способ реализован в комплексном базисе, предполагающем выделение синусоидальных составляющих электрических величин. Мало того, способ нуждается в определении ЭДС, наводимых током ротора в обмотках статора, что выполняется в предположении о неизменности ЭДС в предшествующем режиме и сменившем его текущем режиме короткого замыкания (КЗ) во внешней электрической сети или же повреждения электрической машины. Однако такое допущение тем менее правомерно, чем опаснее повреждение или интенсивнее КЗ. В этом случае еще одна причина недостаточных функциональных возможностей рассматриваемого способа.
Цель изобретения - расширение функциональных возможностей способа релейной защиты синхронной электрической машины. Поставленная цель достигается тем, что алгоритмическая модель защищаемого объекта выполняется в наиболее общем временном базисе. Учитывается взаимосвязь между мгновенными значениями наблюдаемых электрических величин. Это токи статора, ток ротора, фазные напряжения на выводах статора, напряжение его нейтрали. Используется фазная модель неповрежденной синхронной машины. Принципиально новым техническим признаком является двухэтапное преобразование наблюдаемых токов и определенной части напряжений. Фазные алгоритмические модели, как и соответствующие напряжения, распределяются по этапам преобразования. На первом этапе прогнозируется угол поворота ротора, а на втором - те фазные напряжения, которые не были задействованы на первом этапе. Принципиально важно, что такое техническое решение позволяет ввести на втором этапе особый набор входных величин. Если на первом этапе это были наблюдаемые токи и первая часть наблюдаемых напряжений, то на втором этапе - те же токи, но вместо напряжений вводится полученный на первом этапе угол поворота ротора. Эффект от такого решения заключается в том, что вторая часть наблюдаемых напряжений остается в резерве. Появляется возможность спрогнозировать их, а затем сопоставить прогноз с реальностью, формируя двухкоординатный замер и отображая его на плоскости. Если электрическая машина не повреждена, то ее алгоритмическая модель адекватно отражает протекающие процессы. В случае повреждения адекватность нарушается, что скажется на отображении двухкоординатного замера. Оно будет смещено относительно области локализации нормальных режимов электрической машины.
Предлагаемый способ имеет две модификации, частную и общую. Частная, более простая, пригодна для распространенной на практике ситуации, когда частоту вращения ротора можно принять сохраняющейся некоторое время после повреждения машины. В общем же случае угол поворота ротора определяют два неизвестных параметра - частота вращения и начальная фаза. Число алгоритмических моделей первого этапа преобразования входных величин должно быть равно числу неизвестных параметров. Соответственно, для преобразования на втором этапе остается в общей модификации только одна модель, а в частной - две.
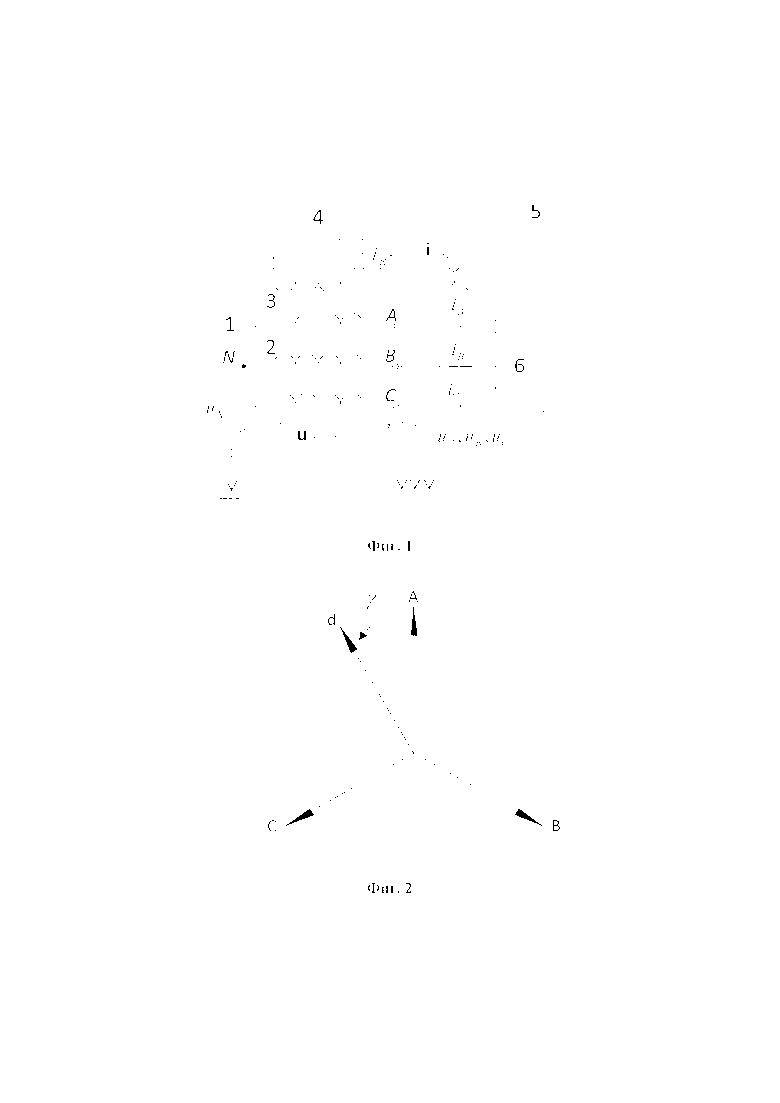
На фиг. 1 изображена структура сети с синхронной электрической машиной. На фиг. 2 - оси электрической машины и угол поворота ротора. На фиг. 3, 4 - структура общей модификации релейной защиты, фиг. 3 - модуль первого этапа преобразования, фиг. 4 - второго этапа. На фиг. 5 показана плоскость двухкоординатного замера с областью отображения режимов неповрежденной электрической машины. На фиг. 6, 7 - структура частной модификации релейной защиты, где не ставится задача определения частоты вращения ротора; фиг. 6 и фиг. 7 - модули первого и второго этапа преобразования.
Наконец, на фиг. 8 приведена принципиальная схема, поясняющая взаимосвязи в электрической машине и лежащая в основе ее алгоритмических моделей.
Синхронная электрическая машина 1 представлена на схеме фиг. 1 обмотками 2 трех фаз статора и обмоткой 3 ротора, питаемой от возбуждения 4. Электрическая машина является частью сети 5. Вторая, внешняя по отношению к машине часть сети 6 является нагрузкой синхронного генератора или источником питания синхронного двигателя.
Регистрируемые релейной защитой электрические величины - четыре напряжения и четыре тока: фазные напряжения uА, uв, uс, напряжение нейтрали uN, токи обмоток статора iA, iB, iC и ток iR обмотки ротора. Наблюдаемые величины представляют собой векторы напряжения и тока
u=[uA, uB, uC, uN ]T,
i=[iA, iB, iC, iR]T.
Падения напряжения в обмотках статора неповрежденной машины - разностные (безнулевые) напряжения

Угол поворота ротора γ определяется положением оси d, вращающейся вместе с ротором, относительно неподвижной оси А обмотки одноименной фазы статора (фиг. 2). В каждый момент времени t зависимость γ(t) аппроксимируется линейной функцией

где ω - мгновенная частота вращения ротора, γ0 - начальная фаза.
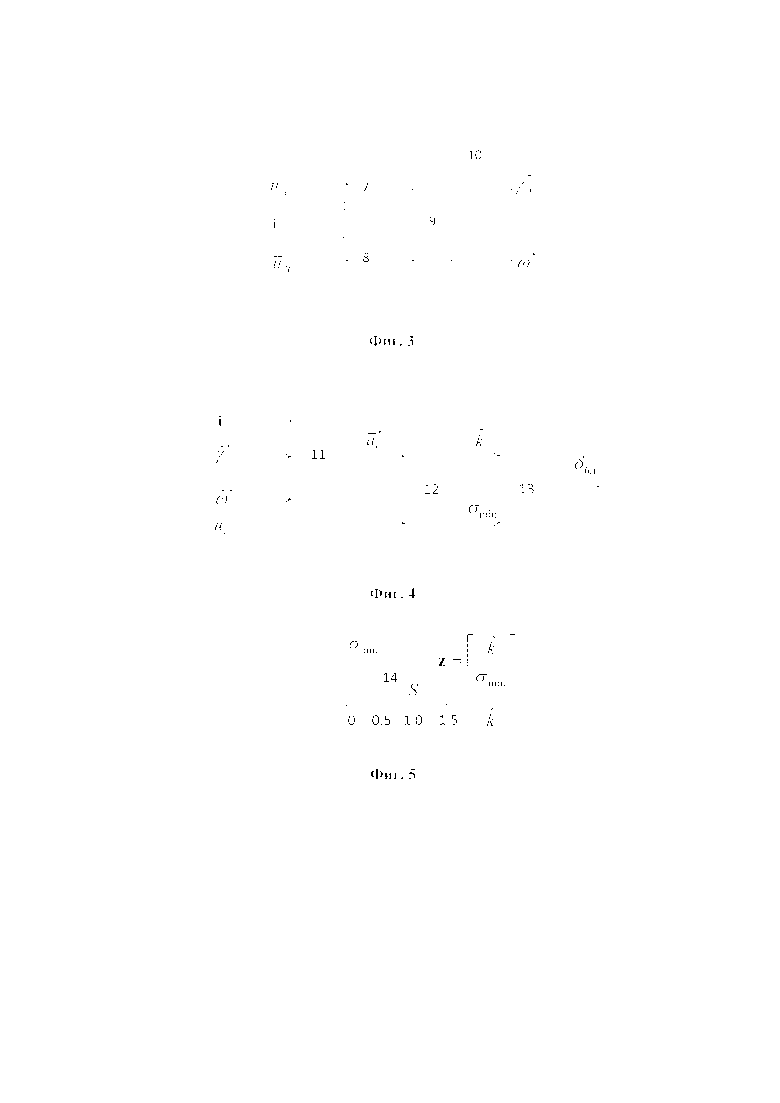
Фазные алгоритмические модели 7 и 8 фаз А и В в общем случае объединены согласующим модулем 9 в единую алгоритмическую модель 10, которая выполняет первый этап преобразования входных напряжений  и вектора тока i в прогнозируемые частоту
и вектора тока i в прогнозируемые частоту  и начальную фазу
и начальную фазу  , где звездочки говорят о том, что это выходные сигналы алгоритмических моделей. Алгоритмическая модель 11 фазы С выполняет второй этап преобразования. Ее входные величины - вектор тока i и полученные на первом этапе сигналы
, где звездочки говорят о том, что это выходные сигналы алгоритмических моделей. Алгоритмическая модель 11 фазы С выполняет второй этап преобразования. Ее входные величины - вектор тока i и полученные на первом этапе сигналы  и
и , а выходная величина всего преобразования - прогнозируемое напряжение
, а выходная величина всего преобразования - прогнозируемое напряжение  фазы С. Модуль сравнения сигналов 12 сопоставляет полученный сигнал
фазы С. Модуль сравнения сигналов 12 сопоставляет полученный сигнал  с реальным напряжением uc(t). О степени близости сравниваемых величин свидетельствует оценка идентичности
с реальным напряжением uc(t). О степени близости сравниваемых величин свидетельствует оценка идентичности и невязка σ. Исполнительный модуль 13 отображает двухкоординатный замер
и невязка σ. Исполнительный модуль 13 отображает двухкоординатный замер  на его плоскости, где задана область 14 в окрестности значения [1,0]т, отвечающего равенству
на его плоскости, где задана область 14 в окрестности значения [1,0]т, отвечающего равенству  , которое справедливо при условии, что алгоритмические модели идентичны реальной неповрежденной электрической машине. Исполнительный орган 13 выдает блокирующий сигнал δбл, если отображение замера попадает в область S.
, которое справедливо при условии, что алгоритмические модели идентичны реальной неповрежденной электрической машине. Исполнительный орган 13 выдает блокирующий сигнал δбл, если отображение замера попадает в область S.
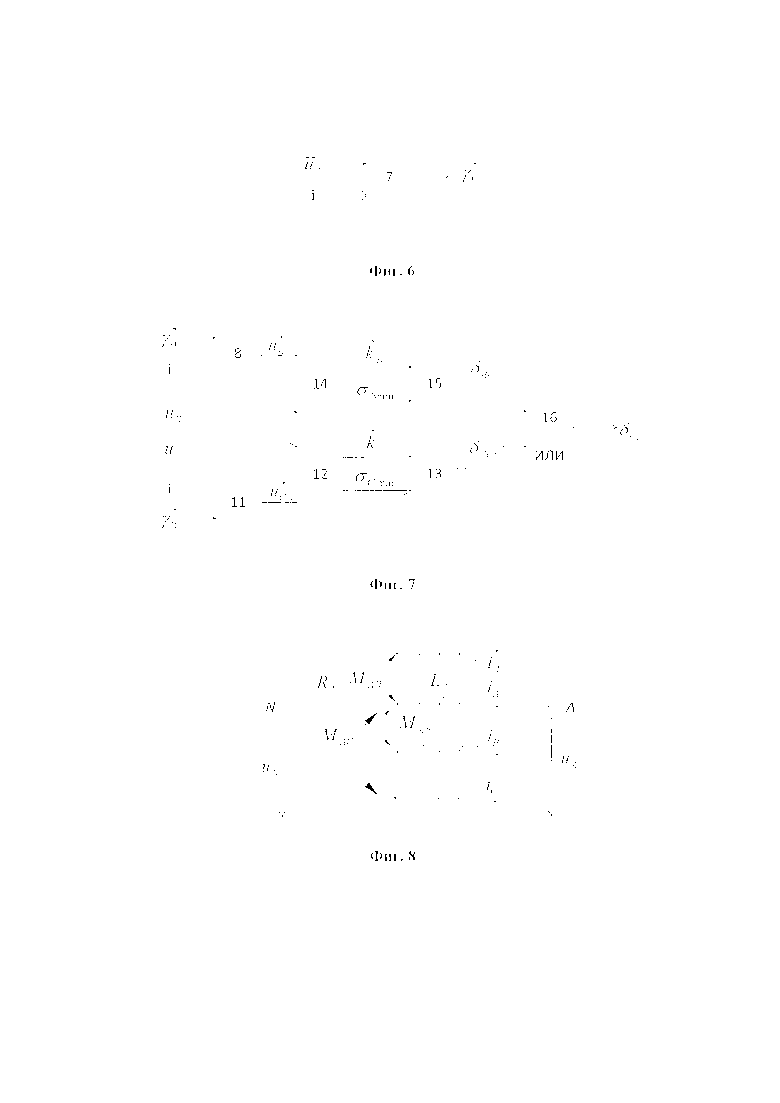
Во многих распространенных ситуациях повреждение электрической машины происходит на фоне рабочего режима, когда частота вращения ротора известна. В силу инерционности ротора частота изменяется медленно, и в начальной стадии процесса короткого замыкания ее можно считать неизменной и известной. В этом частном случае подлежит определению единственный параметр  , для чего достаточно только одной алгоритмической модели, скажем, модели 7 фазы А. Первый этап преобразования при этом ощутимо упрощается (фиг. 6). Что же касается второго этапа (фиг. 7), то и он не усложняется. Структура преобразователя показана двухканальной. Канал фазы В включает в свой состав ее алгоритмическую модель 8 с входными величинами
, для чего достаточно только одной алгоритмической модели, скажем, модели 7 фазы А. Первый этап преобразования при этом ощутимо упрощается (фиг. 6). Что же касается второго этапа (фиг. 7), то и он не усложняется. Структура преобразователя показана двухканальной. Канал фазы В включает в свой состав ее алгоритмическую модель 8 с входными величинами  , i и выходной величиной
, i и выходной величиной  , модуль сравнения 14 и исполнительный модуль 15, выдающий блокирующий сигнал δBбл. Канал фазы С сохраняет свой набор элементов 11, 12, 13. Каналы действуют автономно, и их выходы объединены по схеме ИЛИ 16. Структура такого рода обеспечивает полное использование имеющейся информации, что повышает надежность и функциональные возможности защиты.
, модуль сравнения 14 и исполнительный модуль 15, выдающий блокирующий сигнал δBбл. Канал фазы С сохраняет свой набор элементов 11, 12, 13. Каналы действуют автономно, и их выходы объединены по схеме ИЛИ 16. Структура такого рода обеспечивает полное использование имеющейся информации, что повышает надежность и функциональные возможности защиты.
Теоретическую основу предлагаемого способа составляет описание фазной алгоритмической модели синхронной электрической машины, вытекающее из принципиальной схемы для фазы А (фиг. 6), где RA и LA - сопротивление и индуктивность обмотки статора, МАВ и МАС - взаимные индуктивности с другими фазами статора, МAR - с обмоткой ротора. Наблюдаемые токи и напряжения связаны друг с другом и с параметрами обмоток следующей закономерностью

где Ψv - потокосцепление произвольной фазы v:



Известна зависимость индуктивных параметров синхронной электрической машины от угла поворота γ [6]. Для фазы А




Для фазы В 



Для фазы С



где L0, M0, Lm, Mm - постоянные параметры электрической машины.
Описание алгоритмических моделей, которое предназначается для реализации в микропроцессорных терминалах релейной защиты, необходимо представить в дискретном времени. На малом интервале времени Δt соотношение (3) может быть представлено в следующей дискретной форме, приспособленной к решению задачи первого этапа преобразований - определению угла γ(t)

или в форме, приспособленной к решению задачи второго этапа - определению напряжения

Изменяющиеся во времени сигналы ψv (t) и ψv (t-Δt) определяются зависимостями (2) и (4)-(17). Пусть Fl - обозначение того преобразования, которое совершает алгоритмическая модель, использующая форму (18), a F2 - форму (19). Тогда преобразование вектора наблюдаемых токов i(t) и напряжения uA(t) в начальную фазу γ0(t) при известной частоте ω примет вид 
а для двух других фаз


Если же частота подлежит определению наряду с начальной фазой, то преобразование Fl потребует не одной алгоритмической модели в форме (19), а каких-либо двух, допустим, фаз А и В

и для преобразования F2 в таком случае остается единственная фаза С

Выходные сигналы алгоритмических моделей (21), (22), (24) представляют собой прогнозируемые напряжения  . Их предстоит сравнить с соответствующими
. Их предстоит сравнить с соответствующими
наблюдаемыми напряжениями  , сформировав в итоге двухкоординатный замер. Наиболее простой путь оценки близости двух процессов на интервале времени Δt - применение критерия наименьших квадратов
, сформировав в итоге двухкоординатный замер. Наиболее простой путь оценки близости двух процессов на интервале времени Δt - применение критерия наименьших квадратов

где σv(t) - невязка, kv(t)- масштабирующий множитель. Из условия (25) определяются координаты замера - оценка масштабирующего множителя
и минимальная невязка

или ее квадрат

Двухкоординатный замер

объединяет сигналы (26) и (27) и отображается на своей плоскости в виде точки.
Рассмотрим последовательность операций, реализующих способ защиты синхронной электрической машины. Терминал релейной защиты регистрирует токи статора iv(t) и ток ротора iR(t), фазные напряжения uv(t) и напряжение нейтрали uN(t) (фиг. 1). Допустим, машина работла в нормальном режиме с известной частотой сети ω, близкой к номинальной ωном. Тогда преобразование токов и напряжений осуществляется по частному варианту (фиг. 6, 7). Напряжение одной фазы  и вектор тока i(t) подвергаются преобразованию (20) в начальную фазу
и вектор тока i(t) подвергаются преобразованию (20) в начальную фазу  , а затем тот же вектор вместе с сигналом
, а затем тот же вектор вместе с сигналом  проходят преобразование по алгоритмам (21), (22) в прогнозируемые напряжения
проходят преобразование по алгоритмам (21), (22) в прогнозируемые напряжения  и
и  двух других фаз. Преобразование (20) реализуется модулем 7, а преобразования (21), (22) - модулями 8 и 11.
двух других фаз. Преобразование (20) реализуется модулем 7, а преобразования (21), (22) - модулями 8 и 11.
На втором этапе преобразований формируются двухкоординатные замеры фаз В и С. Составляющие замеров определяются по алгоритмам (26), (27), реализуемым модулями 14 и 12, которые подают на исполнительные модули 15 и 13 замеры (20) при v=В и v=С в соответствующих каналах. Исполнительные модули получают в свое распоряжение область блокировки 14, которая на фиг. 5 имеет еще обозначение S. Условие блокировки защиты по каждому из двух каналов имеет вид

Срабатывание защиты осуществляется при условии

и выполнении общих критериев повреждения синхронной машины.
В своей общей более сложной модификации данный способ приобретает актуальность в тех ситуациях, когда частота ω не поддается априорной оценке и, как следствие, подлежит определению совместно с начальной фазой γ0. Тогда для организации совместной работы алгоритмическим моделям 7 и 8 двух фаз потребуется дополнительный согласующий модуль 9, который позволяет рассматривать зависимости (18) при v=A и v=В как систему двух уравнений с двумя неизвестными γ0 и ω.
Общая алгоритмическая модель 10 фаз А и В реализует оператор (23) F1AB. Алгоритмическая модель 11 фазы С при переходе к общей модификации способа по сути дела сохраняет свою функцию за тем лишь непринципиальным дополнением, что к числу ее входных сигналов i и  добавляется сигнал
добавляется сигнал  , как указано в операторе (24).
, как указано в операторе (24).
Дальнейшие операции с реальным напряжением uc(t) и прогнозируемым  , выдаваемым алгоритмической моделью 11 в структуре по фиг. 4, имеют целью формирование двухкоординатного замера (29) и проверку условия срабатывания (31); все это только для v=C.
, выдаваемым алгоритмической моделью 11 в структуре по фиг. 4, имеют целью формирование двухкоординатного замера (29) и проверку условия срабатывания (31); все это только для v=C.
По принципу своего действия предложенный способ проводит четкий водораздел между повреждениями внутри и вне синхронной электрической машины. Если машина не повреждена, то соблюдаются взаимосвязи между наблюдаемыми электрическими величинами, присущие ее нормальному состоянию, а при повреждении происходит нарушение если не всех взаимосвязей, то части из них. Данный способ основан на контроле этих взаимосвязей, чем и объясняется достигаемый эффект - расширение функциональных возможностей.
Источники информации
1. Шнеерсон Э.М. Цифровая релейная защита. - М.:Энергоатомиздат, 2007 С. 437-462.
2. Лямец Ю.Я., Воронов П.И., Мартынов М.В., Атнишкин А.Б., Широкин М.Ю. Модель неповрежденного энергообъекта как индикатор повреждения. - Электротехника, 2017, №7 С. 60-65.
3. Патент РФ №2612325. Способ релейной защиты энергообъекта, 2016.
4. Патент РФ №2638300. Способ релейной защиты энергообъекта, 2017.
5. Патент РФ №2640290. Способ релейной защиты генератора, 2017 (прототип).
6. Ульянов С.А. Электромагнитные переходные процессы в электрических системах. - Издательство «Энергия», 1964, С. 188-201.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ГЕНЕРАТОРА | 2017 |
|
RU2640290C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ПРИ ДВУХСТОРОННЕМ НАБЛЮДЕНИИ | 2016 |
|
RU2647485C1 |
| СПОСОБ БЫСТРОДЕЙСТВУЮЩЕЙ ДИСТАНЦИОННОЙ ЗАЩИТЫ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ ПОСТОЯННОГО ИЛИ ПЕРЕМЕННОГО ТОКА ПО МГНОВЕННЫМ ТОКАМ И НАПРЯЖЕНИЯМ | 1992 |
|
RU2035816C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕННЫХ ФАЗ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ (ФИДЕРА) | 1992 |
|
RU2050660C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ТРЕХФАЗНОГО ТРАНСФОРМАТОРА | 2017 |
|
RU2655920C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2016 |
|
RU2638300C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ОДНОФАЗНОГО ЗАМЫКАНИЯ ФИДЕРА НА ЗЕМЛЮ | 2013 |
|
RU2542745C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ОДНОФАЗНОГО ЗАМЫКАНИЯ ФИДЕРА НА ЗЕМЛЮ В КАБЕЛЬНЫХ СЕТЯХ СРЕДНЕГО НАПРЯЖЕНИЯ | 2018 |
|
RU2695278C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ЗАМЫКАНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ПРИ ДВУХСТОРОННЕМ НАБЛЮДЕННИ | 2013 |
|
RU2542331C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2016 |
|
RU2612325C1 |
Использование: в области электроэнергетики и электротехники. Технический результат - расширение функциональных возможностей способа. Согласно способу релейной защиты синхронной электрической машины наблюдают токи статора, ток ротора, фазные напряжения на выводах статора и напряжение нейтрали. Используют фазные алгоритмические модели всех трех фаз неповрежденной электрической машины, определяют безнулевые фазные напряжения как разности между фазными напряжениями и напряжением нейтрали, преобразуют в алгоритмических моделях наблюдаемые токи статора и безнулевые фазные напряжения в сигналы, прогнозирующие реальные величины неповрежденной электрической машины. При этом фазные алгоритмические модели и соответствующие безнулевые фазные напряжения подразделяют на первые и вторые, проводят двухэтапные преобразования наблюдаемых токов и первых безнулевых напряжений в двухкоординатные замеры. На первом этапе преобразуют в первых алгоритмических моделях указанные величины в прогнозируемый угол поворота ротора, на втором этапе вновь преобразуют наблюдаемые токи, но на этот раз во вторых алгоритмических моделях и совместно с прогнозируемым углом, в прогнозируемые вторые напряжения. Сравнивают каждое из прогнозируемых напряжений с соответствующим наблюдаемым напряжением, формируют из каждой пары сравниваемых напряжений двухкоординатный замер, отображают его на плоскости, где задают область отображений режимов неповрежденной синхронной машины, и производят срабатывание защиты, если все двухкоординатные замеры отобразятся вне соответствующей области. 2 з.п. ф-лы, 8 ил.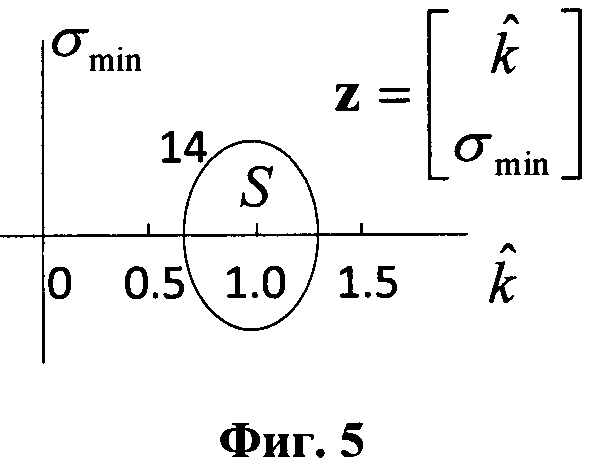
1. Способ релейной защиты синхронной электрической машины, согласно которому наблюдают токи статора, ток ротора, фазные напряжения на выводах статора и напряжение нейтрали, используют фазные алгоритмические модели всех трех фаз неповрежденной электрической машины, определяют безнулевые фазные напряжения как разности между фазными напряжениями и напряжением нейтрали, преобразуют в алгоритмических моделях наблюдаемые токи статора и безнулевые фазные напряжения в сигналы, прогнозирующие реальные величины неповрежденной электрической машины, отличающийся тем, что фазные алгоритмические модели и соответствующие безнулевые фазные напряжения подразделяют на первые и вторые, проводят двухэтапные преобразования наблюдаемых токов и первых безнулевых напряжений в двухкоординатные замеры, на первом этапе преобразуют в первых алгоритмических моделях указанные величины в прогнозируемый угол поворота ротора, на втором этапе вновь преобразуют наблюдаемые токи, но на этот раз во вторых алгоритмических моделях и совместно с прогнозируемым углом, в прогнозируемые вторые напряжения, сравнивают каждое из прогнозируемых напряжений с соответствующим наблюдаемым напряжением, формируют из каждой пары сравниваемых напряжений двухкоординатный замер, отображают его на плоскости, где задают область отображений режимов неповрежденной синхронной машины, и производят срабатывание защиты, если все двухкоординатные замеры отобразятся вне соответствующей области.
2. Способ по п. 1, отличающийся тем, что при известной частоте вращения ротора к числу первых алгоритмических моделей относят только одну фазную модель, а к числу вторых - две другие фазные модели, в первой алгоритмической модели определяют прогнозируемую начальную фазу угла поворота ротора, а в каждой из вторых моделей - прогнозируемые напряжения соответствующих фаз статора, и формируют с участием этих напряжений пару двухкоординатных замеров.
3. Способ по п. 1, отличающийся тем, что в случае, когда частота вращения ротора неизвестна, к числу первых алгоритмических моделей относят модели первой и второй фаз, а к числу вторых - модель третьей фазы, в первых алгоритмических моделях определяют прогнозируемые частоту вращения и начальную фазу угла поворота ротора, а во второй алгоритмической модели - прогнозируемое напряжение ее фазы.
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ГЕНЕРАТОРА | 2017 |
|
RU2640290C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2016 |
|
RU2612325C1 |
| US 5796258 A, 18.08.1998 | |||
| US 5426590 A, 20.06.1995. | |||

