Настоящая заявка выделена из заявки №2013134438 на выдачу патента РФ на изобретение, поданной 06.09.2012, с испрашиванием приоритета по дате подачи первых заявок KR 10-2011-0096138 и KR 10-2012-0039500, поданных в патентное ведомство Кореи 23.09.2011 и 17.04.2012.
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу кодирования и декодирования видео и, более конкретно, к способу декодирования видеосигнала на основе блока-кандидата на слияние.
Уровень техники
В настоящее время в различных областях применения возрастает спрос на видео высокого разрешения и высокого качества, такое как видео высокой четкости (HD) и видео ультравысокой четкости (UHD). При повышении разрешения и качества видео объем видео возрастает по сравнению с существующим видео и, таким образом, в том случае, когда видео передается с использованием такой среды, как существующая проводная или беспроводная широкополосная сеть, или хранится на существующей среде хранения, возрастают стоимость передачи и стоимость хранения. Для решения этих задач, возникающих при повышении разрешения и качества, могут использоваться высокоэффективные технологии сжатия видео.
Технологии сжатия видео включают в себя различные технологии, такие как техника межкадрового предсказания для предсказания значения пикселя, содержащегося в текущем изображении, из изображения до или после текущего изображения, техника внутрикадрового предсказания для предсказания значения пикселя, содержащегося в текущем изображении, с использованием информации о пикселях в текущем изображении, и техника энтропийного кодирования, назначающая более короткие коды для значений с высокой частотой появления и назначающая более длинные коды для значений с низкой частотой появления, при этом видеоданные могут эффективно сжиматься для передачи или сохранения с использованием таких технологий сжатия видео.
Раскрытие изобретения
Техническая задача
Целью настоящего изобретения является обеспечение способа декодирования видеосигнала, основываясь на блоке-кандидате на слияние.
Техническое решение
В соответствии с аспектом настоящего изобретения для достижения вышеуказанной цели настоящего изобретения обеспечен способ декодирования видеосигнала на основе блока-кандидата на слияние. Данный способ может включать в себя формирование списка кандидатов на слияние для текущего блока предсказания с использованием блока кандидата на слияние, при этом блок-кандидат на слияние включает пространственный блок-кандидат на слияние и/или временной блок-кандидат на слияние; и выполнение межкадрового предсказания текущего блока предказания на основе списка кандидатов на слияние. Пространственный блок-кандидат на слияние может включать по меньшей мере один из соседних блоков, смежных с текущим блоком предсказания, при этом соседние блоки включают по меньшей мере один из числа левого соседнего блока, верхнего соседнего блока, верхнего правого соседнего блока, нижнего левого соседнего блока и верхнего левого соседнего блока. Временной блок-кандидат на слияние может содержаться в изображении, имеющем иной временной порядок в сравнении с текущим изображением, содержащим текущий блок предсказания. Если размер области оценки движения (MER) составляет 8×8, и размер блока кодирования составляет 8×8, то по меньшей мере один из соседних блоков может быть заменен блоком замены, расположенным вне MER.
Блок кодирования может содержать текущий блок предсказания размером 8×4 или 4×8.
Размер MER может быть задан информацией уровня параллельного слияния, полученной из видеосигнала.
Межкадровое предсказание каждого из блоков предсказания в MER может выполняться параллельно.
Временной блок-кандидат на слияние может включать первый блок, содержащий ту же координату, что и нижний правый пиксель текущего блока предсказания в изображении, или второй блок, содержащий ту же координату, что и центральный пиксель текущего блока предсказания в изображении.
Предпочтительные результаты
В соответствии со способом декодирования видеосигнала можно снизить требования к вычислениям и сложность выполнения.
Краткое описание чертежей
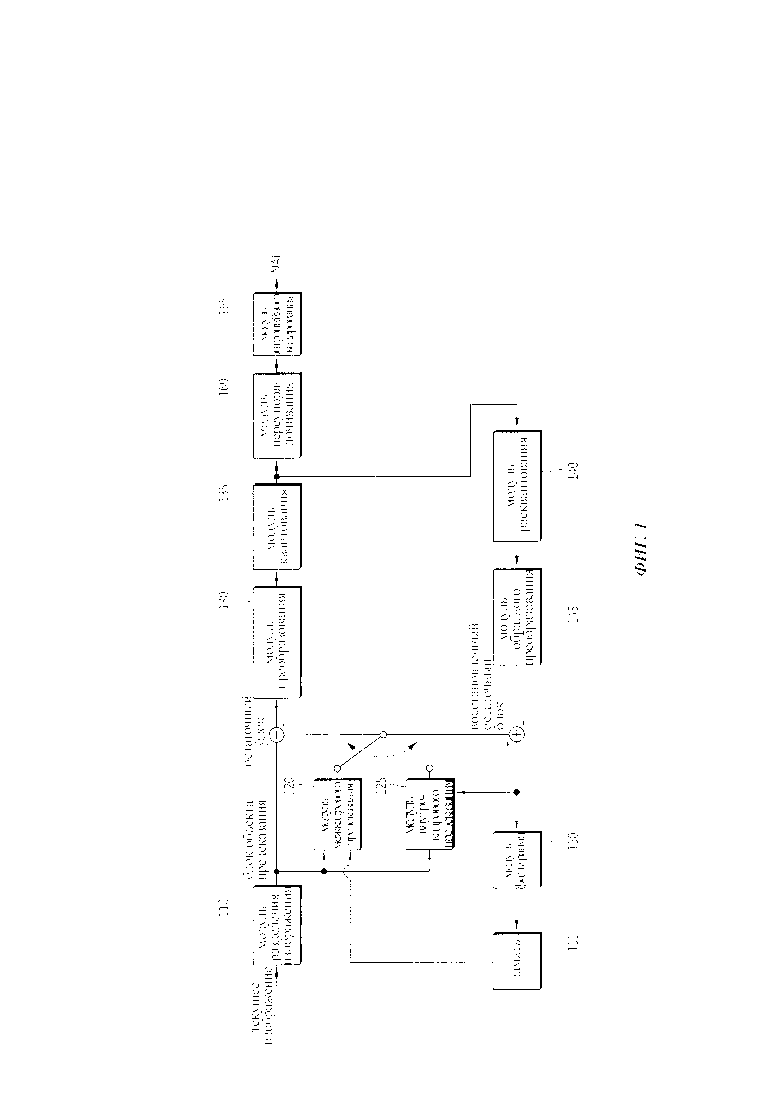
На фиг. 1 показана блок-схема, иллюстрирующая видеокодер в соответствии с примерным вариантом реализации настоящего изобретения.
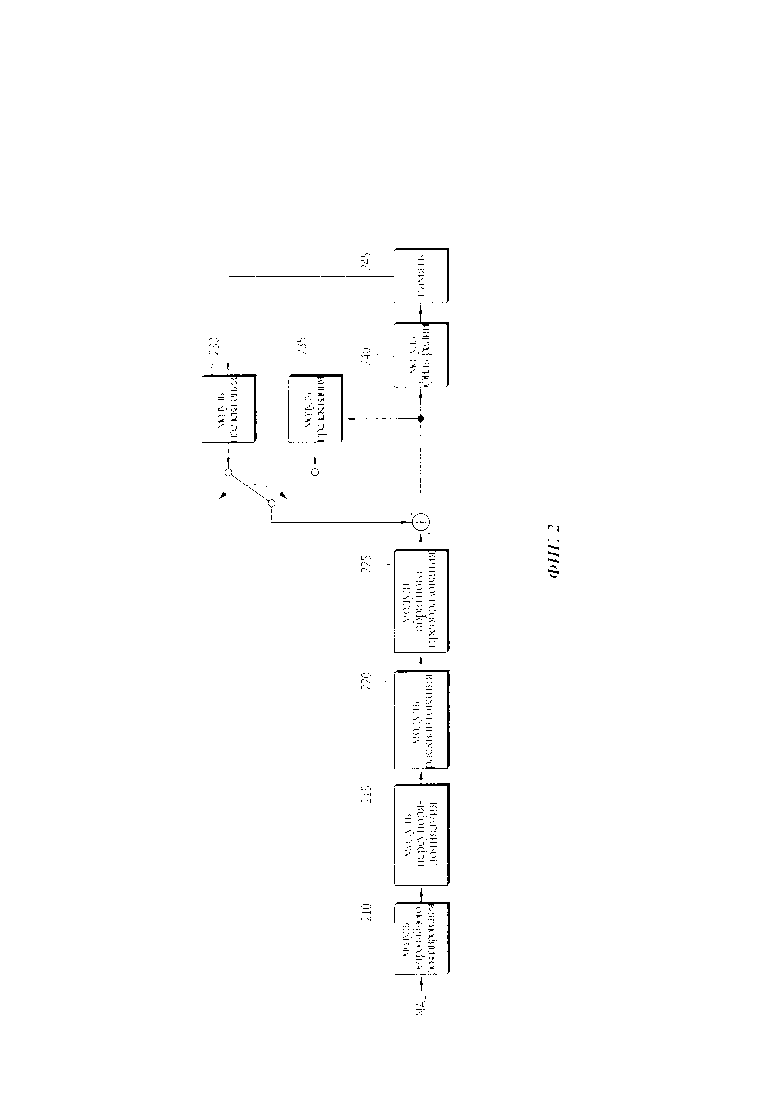
На фиг. 2 показана блок-схема, иллюстрирующая видеодекодер в соответствии с другим примерным вариантом реализации настоящего изобретения.
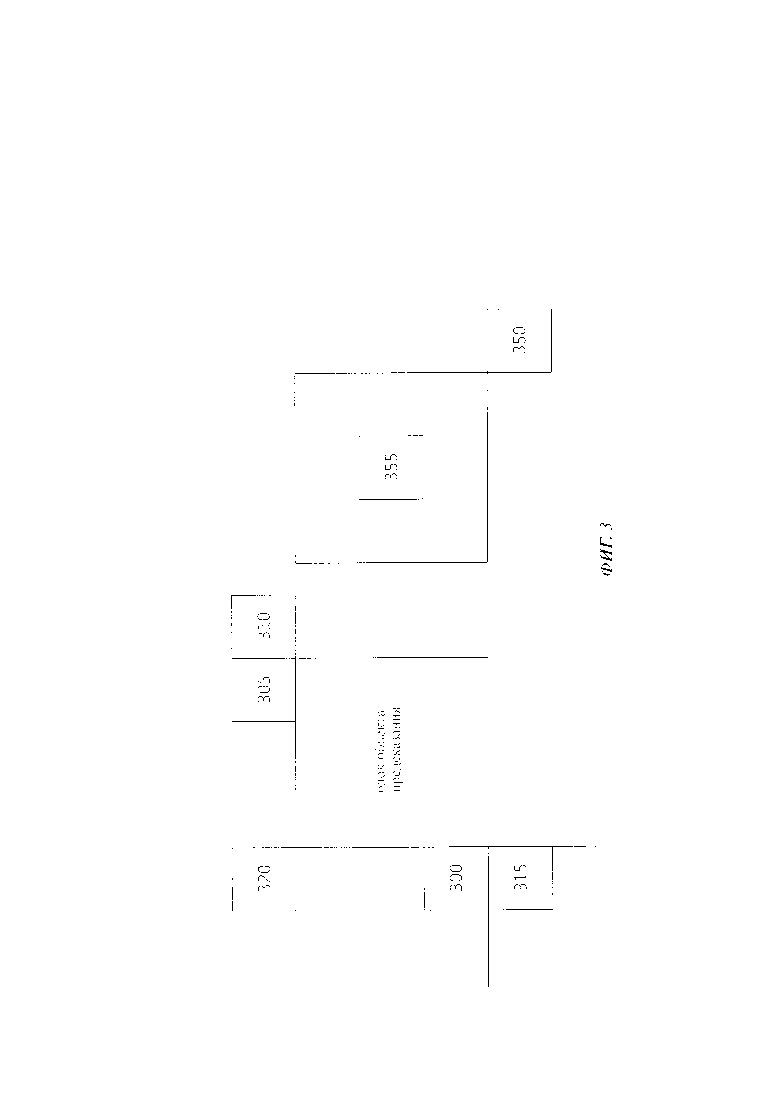
На фиг. 3 показан концептуальный вид, иллюстрирующий блоки-кандидаты для применения режима слияния и режима пропуска в соответствии с примерным вариантом реализации настоящего изобретения.
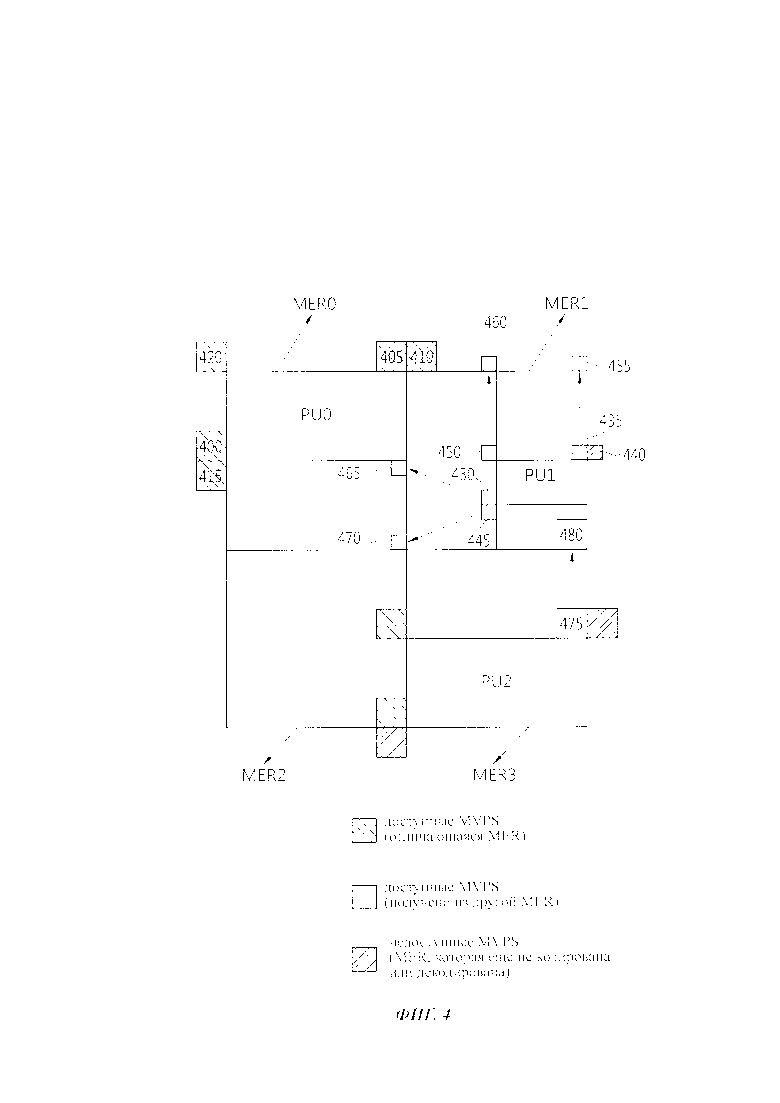
На фиг. 4 показан концептуальный вид, иллюстрирующий способ определения блока-кандидата на слияние в соответствии с примерным вариантом реализации настоящего изобретения.
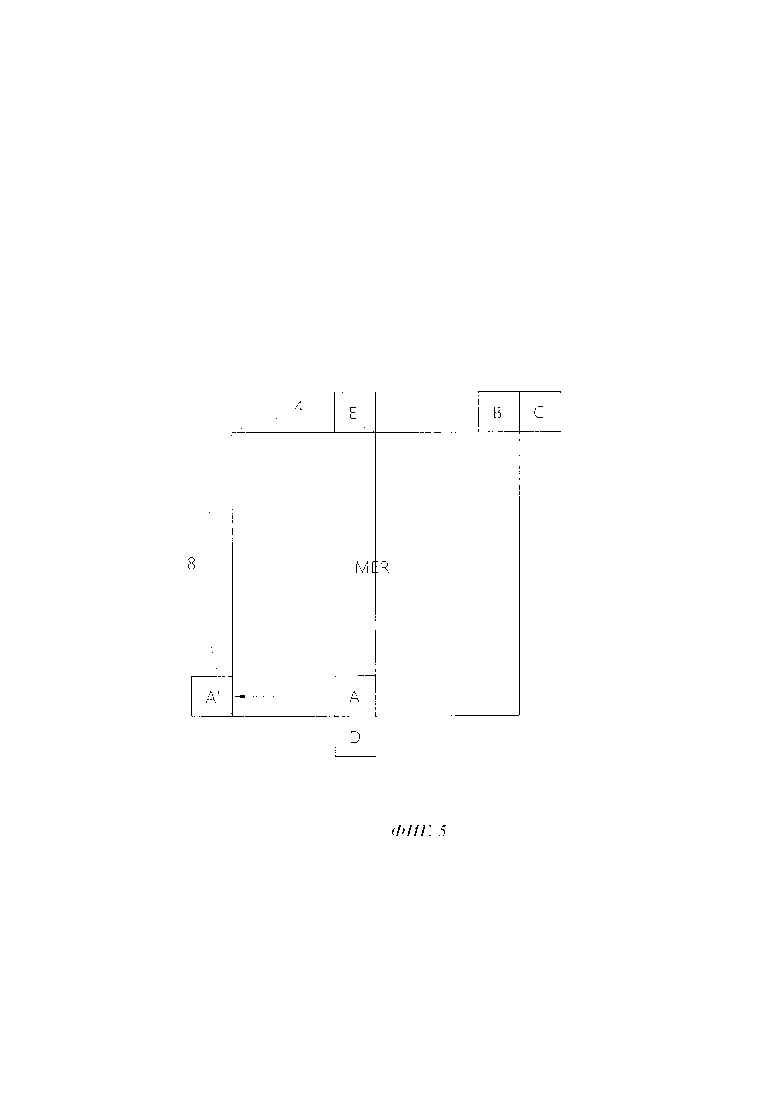
На фиг. 5 показан концептуальный вид, иллюстрирующий способ определения блока-кандидата на слияние в соответствии с размером MER в соответствии с примерным вариантом реализации настоящего изобретения.
На фиг. 6 показан концептуальный вид, иллюстрирующий способ определения того, доступен ли блок-кандидат на слияние текущего блока.
На фиг. 7 показан алгоритм, иллюстрирующий способ получения пространственного блока-кандидата на слияние в режиме слияния в соответствии с примерным вариантом реализации настоящего изобретения.
На фиг. 8 показан алгоритм, иллюстрирующий способ межкадрового предсказания, применяющего режим слияния в соответствии с примерным вариантом реализации настоящего изобретения.
Осуществление изобретения
Поскольку могут быть реализованы различные модификации и примерные варианты исполнения, в настоящем документе более полно со ссылкой на сопровождающие чертежи будут описаны только частные примерные варианты реализации. Однако настоящее изобретение не должно интерпретироваться как ограниченное только приведенными здесь примерными вариантами реализации, а скорее должно пониматься как охватывающее все модификации, эквиваленты или альтернативы, подпадающие под объем и технические условия настоящего изобретения. Одинаковые номера на чертежах относятся к одинаковым элементам.
Понятно, что, несмотря на то, что для описания различных элементов могут быть использованы названия «первый», «второй» и т.д., эти элементы не должны ограничиваться этими названиями. Эти названия используются только, чтобы отличать один элемент от другого. Например, первый элемент может быть назван вторым элементом без отступления от сущности настоящего изобретения, и, аналогично, второй элемент может быть назван первым. Термин «и/или» включает в себя комбинацию множества связанных перечисляемых элементов или любой из множества связанных перечисляемых элементов.
Понятно, что когда признак или элемент обозначается как «подключенный» или «подсоединенный» к другому признаку или элементу, он может быть непосредственно подсоединен или подключен к другому элементу, или может присутствовать промежуточный элемент. Напротив, когда признак или элемент обозначается как «непосредственно подключенный» или «непосредственно подсоединенный» к другому элементу, следует понимать, что промежуточные элементы отсутствуют.
Используемая в настоящем документе терминология предназначена для описания частных вариантов реализации и не подразумевает ограничения примерными вариантами реализации изобретения. Подразумевается, что форма единственного числа также включает в себя и множественное число, если в контексте явно не указывается противоположное. Термины «содержит» или «включает в себя», используемые в настоящем документе, необходимо понимать как указывающие на наличие приводимых признаков, целых чисел, шагов, операций, элементов, компонентов или любой их комбинации, но не исключающие наличие или добавление одного или более других признаков, целых чисел, шагов, операций, элементов, компонентов или любой их комбинации.
Далее настоящее изобретение подробно раскрывается со ссылкой на сопровождающие чертежи. Далее одинаковые номера позиций используются на всех чертежах для обозначения одинаковых частей, а повторное описание одинаковых частей будет опускаться.
На фиг. 1 показана блок-схема, иллюстрирующая видеокодер в соответствии с одним из примеров реализации настоящего изобретения.
Как показано на фиг. 1, видеокодер 100 может включать в себя модуль 110 разделения изображения, модуль 120 межкадрового предсказания, модуль 125 внутрикадрового предсказания, модуль 130 преобразования, модуль 135 квантования, модуль 160 переупорядочивания, модуль 165 энтропийного кодирования, модуль 140 расквантования, модуль 145 обратного преобразования, модуль 150 фильтрации и память 155.
Каждый модуль, показанный на фиг. 1, представлен независимо, чтобы обеспечить различные признаки функций в видеокодере, но это не означает, что каждый модуль выполнен в качестве отдельного аппаратного или программного компонентного блока. То есть, каждый модуль указан как соответствующий элемент для иллюстративных целей, и по меньшей мере два модуля из модулей могут быть объединены в один элемент, или один модуль может быть разделен на несколько элементов, выполняющих какую-либо функцию, при этом вариант реализации, в котором соответствующие модули объединены или разделены, входит в объем формулы настоящего изобретения без отступления от сущности настоящего изобретения.
Кроме того, в настоящем изобретении часть элементов может быть не обязательным элементом для реализации существенной функции, а лишь селективным элементом для улучшения работы. Настоящее изобретение может быть реализовано только с элементами, существенными для реализации сущности настоящего изобретения, без элементов, используемых лишь для улучшения производительности, при этом конфигурация, включающая в себя только существенные элементы, без опциональных элементов, которые используются только для улучшения производительности, также входит в объем формулы настоящего изобретения.
Модуль 110 разделения изображения может разбивать входное изображение на по меньшей мере один блок обработки. Здесь блок обработки может быть блоком предсказания (PU), блоком преобразования (TU) или кодовым блоком (CU). Модуль 110 разделения изображения может разбивать одно изображение на комбинацию из множества кодовых блоков, блоков предсказания и блоков преобразования, и может кодировать изображение путем выбора одной комбинации из кодового блока, блока (блоков) предсказания и блока (блоков) преобразования на основании предварительно определенного критерия (например, функции затрат).
Например, одно изображение может быть разбито на множество кодовых блоков. Для отделения кодового блока может использоваться рекурсивная древовидная структура, такая как счетверенная древовидная структура, при этом кодовый блок, который разделяется на другие кодовые блоки изображения, или наибольший кодовый блок в качестве корневого может быть разделен, чтобы иметь столько младших узлов, каково число разделенных кодовых блоков. Кодовый блок, который далее не разделяется в соответствии с определенным ограничением, становится листовым узлом. Другими словами, если допустить, что для одного кодового блока доступно только квадратное разделение, то один кодовый блок может быть разбит на четыре различных кодовых блока.
Далее в примерных вариантах реализации настоящего изобретения кодовый блок может использоваться применительно не только к блоку для кодирования, но также и к блоку для декодирования.
Блок предсказания может быть разделен с формой квадратов или прямоугольников, имеющих одинаковый размер внутри одного кодового блока.
При формировании блока предсказания для реализации внутрикадрового предсказания на основании кодового блока, если кодовый блок не является наименьшим кодовым блоком, то внутри кадровое предсказание может выполняться без разделения изображения на множество блоков предсказания в блоке N×N.
Модуль предсказания может включать в себя модуль 120 межкадрового предсказания для выполнения межкадрового предсказания и модуль 125 внутрикадрового предсказания для реализации внутрикадрового предсказания. В отношении блока предсказания модуль предсказания может определять, следует ли выполнять межкадровое предсказание или следует выполнять внутрикадровое предсказание, и согласно каждому способу предсказания может определять конкретную информацию (например, режим внутрикадрового предсказания, вектор движения, опорное изображение и т.п.). Здесь блок обработки для выполнения предсказания и блок обработки для определения способа предсказания и конкретных деталей могут различаться. Например, способ предсказания и режим предсказания могут быть определены в блоке предсказания, а предсказание может быть выполнено в блоке преобразования. Остаточное значение (остаточный блок) между сформированным блоком предсказания и исходным блоком может подаваться в модуль 130 преобразования. Информация режима предсказания, информация вектора движения и т.п., используемые для предсказания, также могут кодироваться в модуле 135 энтропийного кодирования вместе с остаточным значением для передачи в декодер. При использовании конкретного режима кодирования возможно, что блок предсказания не формируется с использованием модулей 120, 125 предсказания, а для передачи в декодер кодируется исходный блок в том виде, как он есть.
Модуль межкадрового предсказания может предсказывать блок предсказания на основании информации, по меньшей мере, одного изображения из изображений до или после текущего изображения. Модуль межкадрового предсказания может включать в себя модуль интерполяции опорного изображения, модуль предсказания движения и модуль компенсации движения.
Модуль интерполяции опорного изображения может получать информацию опорного изображения из памяти 155 и может формировать пиксельную информацию, меньшую, чем блок целочисленных пикселей из опорного изображения. В случае пикселя яркости может использоваться 8-выводной интерполяционный фильтр на основании DCT, в котором коэффициент фильтрации изменяется для формирования пиксельной информации, меньшей, чем блок целочисленных пикселей, блоком в 1/4 пикселя. В случае цветного сигнала может использоваться 4-выводной интерполяционный фильтр на основании DCT, в котором коэффициент фильтрации изменяется для формирования пиксельной информации, меньшей, чем блок целочисленных пикселей, блоком в 1/8 пикселя.
Модуль предсказания движения может выполнять предсказание движения на основании опорного изображения, интерполированного модулем интерполяции изображения. Для способа получения вектора движения могут использоваться различные способы, такие как FBMA (от англ. Full search-based Block Matching Algorithm - алгоритм поиска совпадающих блоков на основании полного поиска), TSS (от англ. Three Step Search -трехшаговый поиск) или NTS (от англ. New Three-Step Search Algorithm - новый алгоритм трехшагового поиска). Вектор движения может иметь значение вектора движения в блоке 1/2 или 1/4 пикселя на основании интерполированного пикселя. Модуль предсказания движения может предсказывать текущий блок предсказания путем изменения способа предсказания движения. В качестве способа предсказания движения могут использоваться различные способы, такие как режим пропуска, режим слияния или режим усовершенствованного предсказания вектора движения (AMVP).
В соответствии с примером варианта реализации настоящего изобретения при выполнении межкадрового предсказания может задаваться область оценки движения (MER) для выполнения параллельного предсказания. Например, при выполнении межкадрового предсказания с использованием режима слияния или режима пропуска можно определить, находятся ли блок объекта предсказания и пространственный блок-кандидат на слияние в одной и той же MER, и если блок объекта предсказания и пространственный блок-кандидат на слияние не находятся в одной и той же MER, то пространственный блок-кандидат на слияние может быть определен как недоступный, или блок-кандидат на слияние может быть определен путем выяснения, входит ли пространственный блок-кандидат на слияние в MER, которая еще не декодирована. Далее в примерных вариантах реализации настоящего изобретения описывается действие блока предсказания при выполнении межкадрового предсказания.
Блок межкадрового предсказания может формировать блок предсказания на основании информации об опорных пикселях, соседних с текущим блоком, при этом опорные пиксели являются пикселями внутри текущего изображения. Если блок, соседний для текущего блока предсказания, является блоком, по которому выполняется межкадровое предсказание, при этом опорные пиксели являются пикселями, по которым выполняется внутри кадровое предсказание, то опорные пиксели, входящие в блок, по которому выполняется межкадровое предсказание, могут быть заменены опорными пикселями соседнего блока, по которому выполняется внутрикадровое предсказание. Иначе говоря, если опорный пиксель недоступен, то недоступные опорные пиксели могут быть заменены по меньшей мере одним опорным пикселем из доступных опорных пикселей.
Внутрикадровое предсказание может иметь режимы направленного предсказания, которые используют информацию об опорных пикселях в соответствии с направлением предсказания, и режимы ненаправленного предсказания, которые не используют информацию о направлении при выполнении предсказания. Режим для предсказания информации о яркостных выборках и режим для предсказания информации о цветовых выборках могут различаться. Кроме того, информацию о режиме внутрикадрового предсказания, который используется для яркостных выборок, или информацию о предсказанном сигнале яркости можно использовать для предсказания информации о цветовых выборках.
В случае, если размер блока предсказания и размер блока преобразования одинаковы при выполнении внутрикадрового предсказания, то внутрикадровое предсказание может выполняться по блоку предсказания на основании пикселей, находящихся в левой стороне блока предсказания, пикселей, находящихся в левой верхней области, и пикселей, находящихся в верхней области. Однако, в случае, если размер блока предсказания и размер блока преобразования различаются при выполнении внутрикадрового предсказания, то внутрикадровое предсказание может выполняться с использованием опорных пикселей на основании блока преобразования. Кроме того, может применяться внутрикадровое предсказание, использующее только разделение N×N по отношению к наименьшему кодовому блоку.
В способе внутрикадрового предсказания в соответствии с режимом предсказания для формирования блока предсказания к опорному пикселю может применяться фильтр внутрикадрового сглаживания, зависящий от режима (MDIS). Тип MDIS-фильтра, применяемого к опорному пикселю, может быть различным. Для выполнения внутрикадрового предсказания режим внутрикадрового предсказания текущего блока предсказания может предсказываться из режима внутрикадрового предсказания блока предсказания, соседнего с текущим блоком предсказания. При предсказании режима предсказания текущего блока предсказания с использованием информации о режиме, предсказанной из соседнего блока предсказания, если режимы внутрикадрового предсказания текущего блока предсказания и соседнего блока предсказания одинаковы, то информация о том, что режимы предсказания текущего блока предсказания и соседнего блока предсказания одинаковы, может быть передана с использованием заранее заданной флаговой информации, а если режимы предсказания текущего блока предсказания и соседнего блока предсказания различаются, то информация о режиме предсказания текущего блока может быть декодирована энтропийным кодированием.
Кроме того, остаточный блок, включающий в себя информацию об остаточном значении, которая представляет собой разность между блоком предсказания, по которому выполняют предсказание на основании блока предсказания, сформированного в модуле 120, 125 предсказания, и исходным блоком блока предсказания. Сформированный остаточный блок может быть передан в модуль 130 преобразования. Модуль 130 преобразования может преобразовывать остаточный блок, включающий в себя информацию об остаточном значении исходного блока, и блок предсказания, сформированный в модуле 120, 125 предсказания, с использованием способа преобразования, такого как дискретное косинусное преобразование (DCT) или дискретное синусное преобразование (DST). Что применять - DCT или DST, для преобразования остаточного блока можно определить на основании информации режима внутрикадрового предсказания блока предсказания, использованного для формирования остаточного блока.
Модуль 135 квантования может квантовать значения, преобразованные в частотную область модулем 130 преобразования. Параметр квантования может изменяться в зависимости от блока или важности изображения. Значение, выдаваемое модулем 135 квантования, может подаваться в модуль 140 расквантования и модуль 160 переупорядочивания.
Модуль 160 переупорядочивания может переупорядочивать квантованные значения коэффициентов по отношению к остаточному значению.
Модуль 160 переупорядочивания может модифицировать форму коэффициента из блока в виде двумерного массива в одномерный вектор посредством способа сканирования коэффициентов. Например, в модуле 160 переупорядочивания могут быть просканированы коэффициенты от DC-коэффициента до коэффициента в области высокой частоты для переупорядочивания в форму одномерного вектора путем использования режима диагонального сканирования. В соответствии с размером блока преобразования и режимом внутрикадрового предсказания, вместо режима диагонального сканирования может использоваться режим вертикального сканирования двумерных коэффициентов в блочной форме в направлении столбца или режим горизонтального сканирования двумерных коэффициентов в блочной форме в направлении ряда. Другими словами, в соответствии с размером блока преобразования и режимом внутрикадрового предсказания можно определить, какой режим сканирования из режима диагонального сканирования, режима вертикального сканирования и режима горизонтального сканирования используется.
Модуль 165 энтропийного кодирования выполняет энтропийное кодирование на основании значений, выдаваемых модулем 160 переупорядочивания. Энтропийное кодирование может использовать различные способы кодирования, такие как, например, экспоненциальный код Голомба, бинарное арифметическое кодирование, адаптивное к контексту (САВАС).
Модуль 165 энтропийного кодирования может кодировать различную информацию из модуля 160 переупорядочивания и модуля 120, 125 предсказания, такую как информация об остаточных коэффициентах кодового блока и информация о типе блока, информация режима предсказании, информация блока разделения, информация блока предсказания, информация блока преобразования, информация вектора движения, информация опорного изображения, интерполяционная информация о блоке, информация фильтрации, информация MER, и т.д.
Модуль 165 энтропийного кодирования может выполнять энтропийное кодирование значения коэффициента в кодовом блоке, поступающем из модуля 160 переупорядочивания, путем использования способа энтропийного кодирования, такого как САВАС.
Модуль 140 расквантования и модуль 145 обратного преобразования расквантовывает значения, квантованные модулем 135 квантования, и осуществляет обратное преобразование значений, преобразованных модулем 130 преобразования. Остаточное значение, сформированное модулем 140 расквантования и модулем 145 обратного преобразования, можно добавить в блок предсказания, предсказанный с участием модуля оценки движения, модуля компенсации движения и модуля внутрикадрового предсказания, входящих в модуль 120, 125 предсказания для формирования восстановленного блока.
Модуль 150 фильтрации может включать в себя, по меньшей мере, одно из деблокирующего фильтра, модуля коррекции смещения и адаптивного фильтра с обратной связью (ALF).
Деблокирующий фильтр может устранять блочное искажение, образующееся из-за границы между блоками в восстановленном изображении. Чтобы установить, следует ли выполнять деблокирующую фильтрацию, можно определить, следует ли применять деблокирующий фильтр к текущему блоку на основании пикселей, содержащихся в нескольких столбцах или рядах, входящих в данный блок. При применении деблокирующего фильтра к блоку, может применяться сильный фильтр или слабый фильтр в зависимости от требуемой силы деблокирующей фильтрации. Кроме того, при применении деблокирующего фильтра при выполнении вертикальной фильтрации или горизонтальной фильтрации горизонтальное направление фильтрации и вертикальное направление фильтрации можно обрабатывать параллельно.
Модуль коррекции смещения может корректировать смещение по сравнению с исходным изображением посредством пиксельного блока в отношении изображения, по которому выполняют деблокирующую фильтрацию. Для выполнения коррекции смещения в отношении конкретного изображения можно использовать способ классификации пикселей, содержащихся в изображении в заранее заданном числе областей, определяющий область, в которой должно выполняться смещение, и применение смещения к соответствующей области, или можно использовать способ применения смещения путем рассмотрения краевой информации каждого пикселя.
Адаптивный фильтр с обратной связью (ALF) может выполнять фильтрацию на основании сравнения фильтрованного восстановленного изображения и исходного изображения. После классификации пикселей, содержащихся в изображении в заранее заданной группе и определения, какой фильтр следует применить к соответствующей группе, можно применить фильтрацию к каждой группе, определенной различно с каждым фильтром. Информацию о том, следует ли применять ALF, можно передавать посредством кодового блока (CU), а размер и коэффициент фильтра ALF, который следует применить, могут различаться для каждого блока. Фильтр ALF может иметь различные формы и, следовательно, количество коэффициентов в фильтре может быть различным для каждого фильтра. Относящаяся к фильтрации информация о фильтре ALF (информация о коэффициентах фильтра, информация о включении/выключении фильтра ALF, информация о форме фильтра и т.п.) может содержаться и передаваться в заранее заданном наборе параметров в битовом потоке.
Память 155 может сохранять восстановленный блок или изображение, выдаваемые модулем 150 фильтрации, а сохраненный восстановленный блок или изображение могут передаваться в модуль 120, 125 предсказания при выполнении межкадрового предсказания.
На фиг. 2 показана блок-схема, иллюстрирующая декодер изображения в соответствии с другим примерным вариантом реализации настоящего изобретения.
Согласно фиг. 2, видеодекодер может включать в себя модуль 210 энтропийного декодирования, модуль 215 переупорядочивания, модуль 220 расквантования, модуль 225 обратного преобразования, модуль 230, 235 предсказания, модуль 240 фильтрации и память 245.
При подаче из видеокодера битового потока видео входящий битовый поток может быть декодирован в порядке, обратном порядку обработки в видеокодере.
Модуль 210 энтропийного декодирования может выполнять энтропийное декодирование в обратном порядке выполнения энтропийного кодирования в модуле энтропийного кодирования видеокодера. Информация для формирования блока предсказания среди информации, декодированной модулем 210 энтропийного декодирования, может быть передана в модуль 230, 235 предсказания, а остаточные значения, которые энтропийно декодированы в модуле энтропийного декодирования, можно передавать в модуль 215 переупорядочивания.
Модуль 210 энтропийного декодирования может декодировать информацию, относящуюся к внутрикадровому предсказанию и межкадровому предсказанию, выполняемым кодером. Как раскрыто выше, при наличии заранее заданного ограничения для внутрикадрового предсказания и межкадрового предсказания в видеокодере, информация, относящаяся к внутрикадровому предсказанию и межкадровому предсказанию текущего блока, может обеспечиваться путем выполнения энтропийного декодирования на основании ограничений.
Модуль 215 переупорядочивания может выполнять переупорядочивание битового потока, энтропийно декодированного модулем 210 энтропийного декодирования на основании способа переупорядочивания кодера. Коэффициенты, представленные в форме одномерного вектора, могут быть восстановлены и переупорядочены в форму двумерного блока.
Модуль 220 расквантования может выполнять расквантование на основании параметра квантования, полученного из кодера, и переупорядоченного блока коэффициентов.
Модуль 225 обратного преобразования может выполнять обратное DCT-преобразование и обратное DST-преобразование над результатом квантования, выполненного видеокодером в отношении преобразований DCT и DST, выполненных модулем преобразования. Обратное преобразование может выполняться на основании блока преобразования, определенного видеокодером. Преобразования DCT и DST в модуле преобразования видеокодера могут выполняться выборочно в соответствии с совокупностью информации, такой как способ предсказания, размер текущего блока и направление предсказания, а модуль 225 обратного преобразования видеодекодера может выполнять обратное преобразование на основании информации преобразования, выполненного в модуле преобразования видеокодера.
Модуль 230, 235 предсказания может формировать блок предсказания на основании информации, относящейся к формированию блока предсказания, полученной из модуля 210 энтропийного декодирования, и информации о предварительно декодированном блоке или изображении, полученной из памяти 245.
Модуль 230, 235 предсказания может включать в себя модуль определения блока предсказания, модуль межкадрового предсказания и модуль внутрикадрового предсказания. Модуль определения блока предсказания может получать различную информацию, поступающую из энтропийного декодера, такую как информация блока предсказания, информация режима предсказания для способа внутрикадрового предсказания и информация, относящаяся к предсказанию движения для способа межкадрового предсказания, различать блок предсказания в текущем кодовом блоке на основании полученной информации и определять, выполняется ли межкадровое предсказание по блоку предсказания или выполняется внутрикадровое предсказание по блоку предсказания. Блок межкадрового предсказания может выполнять межкадровое предсказание в отношении текущего блока предсказания на основании информации, содержащейся, по меньшей мере, в одном изображении из предыдущих изображений и последующих изображений текущего изображения, содержащих текущий блок предсказания, с использованием информации, требуемой для межкадрового предсказания текущего блока предсказания, представленного видеокодером.
Для выполнения межкадрового предсказания можно определить на основании кодового блока, является ли способ предсказания движения в блоке предсказания, входящем в соответствующий кодовый блок, режимом пропуска, режимом слияния или режимом AMVP.
В соответствии с примерным вариантом реализации настоящего изобретения, при выполнении межкадрового предсказания можно определить область оценки движения (MER) для выполнения параллельного предсказания. Например, при выполнении межкадрового предсказания с использованием слияния или пропуска можно определить, находятся ли блок объекта предсказания и пространственный блок-кандидат на слияние в одной и той же MER. Если блок объекта предсказания и пространственный блок-кандидат на слияние не находятся в одной и той же MER, то пространственный блок-кандидат на слияние можно определить как недоступный, или пространственный блок-кандидат на слияние можно определить как блок-кандидат на слияние, определив, находится ли пространственный блок-кандидат на слияние в MER, которая еще не декодирована. Далее подробно раскрывается работа модуля предсказания в примерном варианте реализации настоящего изобретения.
Модуль внутрикадрового предсказания может формировать блок предсказания на основании пиксельной информации внутри текущего изображения. Если блок предсказания является блоком предсказания для выполнения внутрикадрового предсказания, то внутрикадровое предсказание может выполняться на основании информации режима внутрикадрового предсказания блока предсказания, полученного из видеокодера. Модуль внутрикадрового предсказания может включать в себя MDIS-фильтр, модуль интерполяции опорного пикселя и DC-фильтр. MDIS-фильтр является модулем для выполнения фильтрации по опорному пикселю текущего блока, при этом применять ли данный фильтр, можно определить и применить в соответствии с режимом предсказания текущего блока предсказания. Фильтрация может выполняться по опорному пикселю текущего блока с использованием режима предсказания блока предсказания и информации MDIS-фильтра, предоставленных видеокодером. Если режим предсказания текущего блока является режимом, который не выполняет фильтрацию, то MDIS-фильтр может не применяться.
Модуль интерполяции опорного пикселя может формировать опорный пиксель в пиксельном блоке, меньшем, чем целое значение, путем интерполяции опорного пикселя, если режим предсказания блока предсказания является блоком предсказания для выполнения внутрикадрового предсказания на основании пиксельного значения интерполированного опорного пикселя. Если режим предсказания текущего блока предсказания является режимом предсказания, который формирует блок предсказания без интерполяции опорного пикселя, то опорный пиксель можно не интерполировать. DC-фильтр может формировать блок предсказания посредством фильтрации, если режим предсказания текущего блока является DC-режимом.
Восстановленный блок или изображение могут быть переданы в модуль 240 фильтрации. Модуль 240 фильтрации может включать в себя деблокирующий фильтр, модуль коррекции смещения и ALF.
Информацию о том, применяется ли деблокирующий фильтр к соответствующему блоку или изображению, и если деблокирующий фильтр применяется, то применяется ли сильный фильтр или слабый фильтр, можно подавать из видеокодера. Деблокирующий фильтр видеодекодера может получать информацию о деблокирующем фильтре из видеокодера, а также он может выполнять деблокирующую фильтрацию для соответствующего блока в видеодекодере. Аналогично видеокодеру, сначала осуществляется вертикальная деблокирующая фильтрация и горизонтальная деблокирующая фильтрация, тогда как по меньшей мере одно из вертикального деблокирования и горизонтального деблокирования могут выполняться в перекрывающейся области. В перекрывающейся области вертикальной деблокирующей фильтрации и горизонтальной деблокирующей фильтрации могут выполняться вертикальная деблокирующая фильтрация или горизонтальная деблокирующая фильтрация, которая до этого не осуществлялась. Благодаря этому процессу деблокирующей фильтрации становится возможной параллельная обработка деблокирующей фильтрации.
Модуль коррекции смещения может выполнять коррекцию смещения для восстановленного изображения на основании типа коррекции смещения, применяемого к изображению, и информации о значении смещения.
ALF может выполнять фильтрацию на основании значения сравнения исходного изображения и изображения, восстановленного с использованием фильтрации. ALF может применяться к кодовому блоку на основании информации о том, применяется ли ALF, информации о коэффициентах ALF, полученных из декодера. Информация ALF может быть включена в предоставляемый набор конкретных параметров.
Память 245 может сохранять восстановленное изображение или блок, используемые в качестве опорного изображения или опорного блока, а восстановленное изображение может подаваться в выходной модуль.
Как отмечалось выше, хотя «кодовый блок» используется для обозначения блока кодирования согласно примерному варианту реализации настоящего изобретения, кодовый блок может быть блоком для выполнения не только кодирования, то также и декодирования. Способ предсказания, далее представленный на фиг. 3-11 согласно примерному варианту реализации настоящего изобретения, может осуществляться с использованием такого элемента, как модуль предсказания, представленный на фиг. 1 и 2.
На фиг. 3 представлен концептуальный вид, иллюстрирующий блоки-кандидаты для применения режима слияния и режима пропуска в соответствии с примером реализации настоящего изобретения.
В настоящем документе для иллюстративных целей описание дается применительно к режиму слияния в примерном варианте реализации настоящего изобретения; однако этот же способ применим для режима пропуска, и такой вариант реализации также входит в объем притязаний настоящего изобретения.
Согласно фиг. 3, для выполнения межкадрового предсказания при режиме слияния можно использовать пространственные блоки-кандидаты 300, 305, 310, 315, 320 на слияние и временные блоки-кандидаты 350, 355 на слияние.
Когда точка (хР, уР) находится в верхней левой части блока объекта предсказания относительно местоположения блока объекта предсказания, с шириной блока объекта предсказания nPSW и высотой блока объекта предсказания sPSH, то каждый блок из пространственных блоков-кандидатов 300, 305, 310, 315, 320 на слияние может быть одним из первого блока 300, содержащего точку (хР-1, yP+nPSH-MinPuSize), второго блока 305, содержащего точку (xP+nPSW-MinPuSize, уР-1), третьего блока 310, содержащего точку (xP+nPSW, уР-1), четвертого блока 315, содержащего точку (хР-1, yP+nPSH), и пятого блока 320, содержащего точку (xP-MinPuSize, уР-1).
Временный кандидат на слияние может использовать множество блоков-кандидатов и первый Col-блок 350 (связанный блок) может быть блоком, содержащим точку (xP+nPSW, yP+nPSH), расположенную на Col-изображении (связанном изображении). Если первый Col-блок 350 не существует или недоступен (например, если первый Col-блок не выполняет межкадровое предсказание), то вместо него может использоваться второй Col-блок 355, содержащий точку (xP+(nPSW>>1), yP+(nPSH>>1)), расположенную на Col-изображении.
В соответствии с примерным вариантом реализации настоящего изобретения, для выполнения межкадрового предсказания с параллельным использованием режима слияния при выполнении предсказания движения, можно определить, используется ли блок-кандидат на слияние в отношении некоторой области. Например, чтобы определить блок-кандидат на слияние для выполнения режима слияния в отношении заданной области определенного размера, можно определить, существует ли блок-кандидат на слияние в заданной области совместно с блоком объекта предсказания, чтобы определить, следует использовать блок-кандидат на слияние или нет, или заменить другим блоком-кандидатом на слияние, тем самым параллельно осуществляя предсказание движения в отношении заданной области. Далее в настоящем документе будет раскрыт способ параллельного предсказания движения с использованием режима слияния согласно примерному варианту реализации настоящего изобретения.
На фиг. 4 показан концептуальный вид, иллюстрирующий способ определения блока-кандидата на слияние в соответствии с примерным вариантом реализации настоящего изобретения.
Согласно фиг. 4 подразумевается, что наибольший кодовый блок (LCU) разделен на четыре области оценки движения (MER).
В случае первого блока PU0 предсказания, находящегося в первой MER (MER0), подобно фиг. 4, если межкадровое предсказание выполняют с использованием режима слияния в отношении первого блока PU0 предсказания, то в качестве пространственных блоков-кандидатов на слияние могут выступать пять пространственных блоков-кандидатов 400, 405, 410, 415, 420 на слияние. Пять блоков-кандидатов 400, 405, 410, 415, 420 на слияние могут иметь местоположение, не входящее в первую MER (MER0) и могут быть блоками, по которым кодирование/декодирование уже выполнено.
Второй блок (PUI) предсказания является блоком предсказания, входящим во вторую MER (MER1), а четыре блока-кандидата 430, 435, 445, 450 на слияние среди пространственных блоков-кандидатов 430, 435, 440, 445, 450 на слияние для выполнения межкадрового предсказания с использованием режима слияния могут быть блоками, которые находятся во второй MER (MER1) и блоками, которые принадлежат к одной и той же MER, которая в текущий момент выполняет предсказание. Оставшийся один блок-кандидат 440 на слияние может быть блоком, который находится на правой стороне текущей MER, и блоком, входящим в LCU или MER, для которых кодирование/декодирование еще не осуществлялись.
В соответствии с примерным вариантом реализации настоящего изобретения, если блок-кандидат на слияние текущего блока и текущий блок принадлежат к одной и той же MER, то блок-кандидат на слияние текущего блока и текущий блок исключаются, а в качестве кандидата на слияние в соответствии с размером текущего блока и размером MER может быть добавлена информация о движении по меньшей мере одного блока в другом местоположении.
В качестве блока-кандидата на слияние можно добавить блок, содержащий точку, которая находится в другой MER в вертикальном или горизонтальном направлении. Как вариант, в качестве блока-кандидата на слияние можно добавить блок, принадлежащий другой MER, с местоположением, ближайшим к блоку-кандидату на слияние. Как вариант, в качестве блока-кандидата на слияние может быть добавлен блок с заданным местоположением согласно форме и размеру текущего блока.
Например, в случае, если блок-кандидат 435 на слияние расположен в верхней стороне второго блока (PU1) предсказания, а блок-кандидат 450 на слияние расположен в верхней левой стороне второго блока предсказания, то в качестве заменяемых блоков-кандидатов на слияние могут использоваться блоки 455, 460, содержащие точки, расположенные вне второй MER в вертикальном направлении. Для блока-кандидата 430 на слияние, расположенного в левой стороне второго блока предсказания, и блока 445 кандидата на слияние, расположенного в левой нижней стороне второго блока предсказания, блоки 465, 470, имеющие точки вне данной MER в горизонтальном направлении, могут использоваться в качестве заменяемых блоков-кандидатов на слияние. Если блок входит в одну и ту же MER с текущим блоком предсказания и, таким образом, не может использоваться в качестве блока-кандидата на слияние, то блок-кандидат на слияние может быть заменен другим блоком, включающим в себя точку в другой MER в соответствии с местоположением блока-кандидата на слияние.
В случае третьего блока (PU2) предсказания, блок-кандидат 475 на слияние, входящий в одну и ту же MER с третьим блоком предсказания, может быть заменен для использования блоком 480, который находится с верхней стороны в вертикальном направлении. Далее, согласно другому примерному варианту реализации настоящего изобретения, можно заменить местоположение блока-кандидата на слияние путем замены местоположения пространственного блока-кандидата на слияние блоком, входящим в другую MER, в направлении, которое не является ни вертикальным, ни горизонтальным, и этот примерный вариант реализации также входит в объем притязаний настоящего изобретения.
Для реализации способа для определения блоков-кандидатов на слияние могут выполняться следующие шаги.
1) Шаг декодирования информации, относящейся к области оценки движения (MER)
Информация, относящаяся к MER, может включать в себя информацию о размере MER. На основании информации о размере MER и размере блока объекта предсказания можно определить, входит ли блок объекта предсказания в данную MER.
2) Шаг определения, находятся ли блок объекта предсказания и пространственный блок-кандидат на слияние в одной и той же MER
В том случае, если блок объекта предсказания и пространственный блок-кандидат на слияние находятся в одной и той же MER, для адаптивного определения пространственного блока-кандидата на слияние в соответствии с размером MER и размером блока объекта предсказания могут быть выполнены следующие шаги.
3) Шаг установления, что пространственный блок-кандидат на слияние недоступен, если блок объекта предсказания и пространственный блок-кандидат на слияние находятся в одной и той же MER.
Если блок объекта предсказания и пространственный блок-кандидат на слияние находятся в одной и той же MER, то пространственный блок-кандидат на слияние может быть определен как недоступный, а пространственный блок-кандидат на слияние, находящийся в той же самой MER, может быть заменен другим блоком-кандидатом на слияние. Кроме того, как раскрыто ниже, возможно, что блок-кандидат на слияние, определенный как недоступный, может не использоваться в межкадровом предсказании с режимом слияния.
В соответствии с другим примерным вариантом реализации настоящего изобретения может применяться способ, который не использует блок-кандидат на слияние, содержащийся в одной и той же MER с блоком объекта предсказания.
Например, среди блоков-кандидатов на слияние для межкадрового предсказания, использующего режим слияния в параллель, доступны блоки, которые находятся в MER, для которой уже выполнено кодирование/декодирование, и если отличается от текущей MER, в которой в текущий момент выполняется предсказание. Данные блоки могут использоваться в качестве блоков-кандидатов межкадрового предсказания с режимом слияния. Однако блоки, которые принадлежат к MER, для которой в текущий момент выполняется предсказание, могут не использоваться в качестве блока-кандидата межкадрового предсказания для межкадрового предсказания с режимом слияния. Блок, по отношению к которому кодирование/декодирование не осуществляется, может также не использоваться в качестве блока-кандидата межкадрового предсказания. Этот примерный вариант реализации также входит в объем притязаний настоящего изобретения.
На фиг. 5 представлен концептуальный вид, иллюстрирующий способ определения блока-кандидата на слияние на основании размера MER в соответствии с примерным вариантом реализации настоящего изобретения.
Согласно фиг. 5, кандидат на слияние может быть адаптивно определен в соответствии с размером MER и размером текущего блока предсказания. Например, в случае, если кандидат на слияние, соответствующий одному из местоположений кандидатов А, В, С, D, Е на слияние, входит в ту же самую MER, что и текущий блок предсказания, то данный кандидат на слияние определяется как недоступный. Здесь, в соответствии с размером текущего блока и размером MER, в качестве кандидата на слияние может добавляться информация о движении, по меньшей мере, одного блока в другом положении.
На фиг. 5 считается, что размер MER равен 8×8, а размер блока объекта предсказания равен 4×8. Когда размер MER равен 8×8, блок А, входящий в блок объекта предсказания, принадлежит той же самой MER, что и блок объекта предсказания, а блоки В, С, D и Е входят в MER, отличающуюся от блока объекта предсказания.
В случае блока А, данный блок может быть заменен блоком с местоположением (например, блоком А'), находящимся в другой MER. Следовательно, в соответствии с примерным вариантом реализации настоящего изобретения, если блок-кандидат на слияние текущего блока и текущий блок принадлежат одной и той же MER, то блок-кандидат на слияние текущего блока может исключаться из блоков-кандидатов на слияние, при этом в качестве кандидата на слияние в соответствии с размером текущего блока и размером MER может добавляться информация о движении, по меньшей мере, одного блока с другим местоположением.
В соответствии с примерным вариантом реализации настоящего изобретения информация о размере MER может включаться в передаваемую информацию синтаксиса верхнего уровня.
Приведенная ниже Таблица 1 связана со способом передачи информации о размере MER в синтаксисе верхнего уровня.
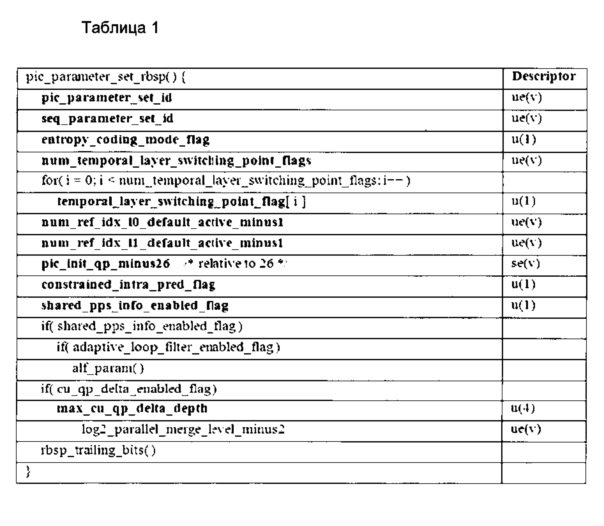
Согласно Таблице 1, информация о размере MER может быть получена на основании элемента синтаксиса log2_parallel_merge_level_minus2, содержащегося в структуре синтаксиса высокого уровня, такой как набор параметров изображения (picture parameter set). Элемент синтаксиса log2_parallel_merge_level_minus2 также может входить в структуру синтаксиса высокого уровня, отличающуюся от набора параметров изображения, и этот пример варианта реализации также входит в объем притязаний настоящего изобретения.
Приведенная далее Таблица 2 описывает взаимоотношение между значением log2_parallel_merge_level_minus2 и размером MER.
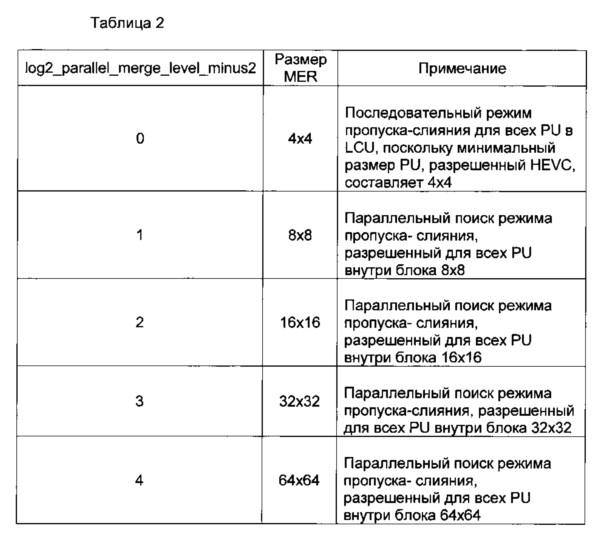
Согласно Таблице 2, значение log2_parallel_merge_level_minus2 может принимать значение от 0 до 4 включительно, а размер MER может быть указан различным в соответствии со значением элемента синтаксиса. Если MER равна 0, это - то же самое, что и выполнение межкадрового предсказания с использованием режима слияния без использования данной MER.
Элемент синтаксиса, содержащий информацию о размере MER, в примерном варианте реализации настоящего изобретения может представляться и использоваться как термин «элемент синтаксиса информации о размере MER», при этом определение элемента синтаксиса информации о размере MER согласно Таблице 2 является примером, и возможно указывать размер MER, используя различные другие способы, и такой способ выражения элемента синтаксиса также входит в объем притязаний настоящего изобретения.
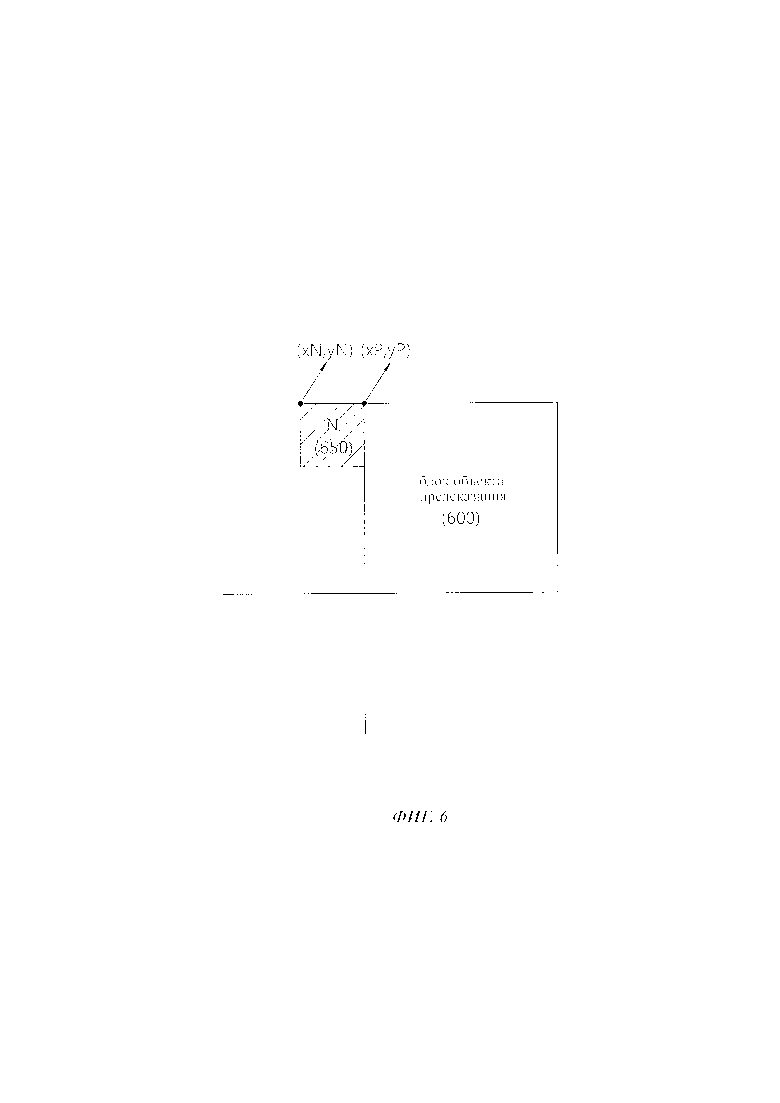
На фиг. 6 представлен концептуальный вид, иллюстрирующий способ определения того, доступен ли пространственный блок-кандидат на слияние текущего блока.
Согласно фиг. 6, доступность пространственного блока-кандидата на слияние можно определить на основании местоположений блока 600 объекта предсказания и блока-кандидата 650 на слияние, соседнего для блока 600 объекта предсказания, и элемента синтаксиса информации о размере MER.
Если подразумевается, что (хР, уР) является верхней левой точкой блока объекта предсказания, a (xN, yN) является верхней левой точкой блока-кандидата на слияние, то доступность пространственного блока-кандидата на слияние может быть определена с помощью нижеследующих Выражения 1 и Выражения 2.
Выражение 1

Выражение 2
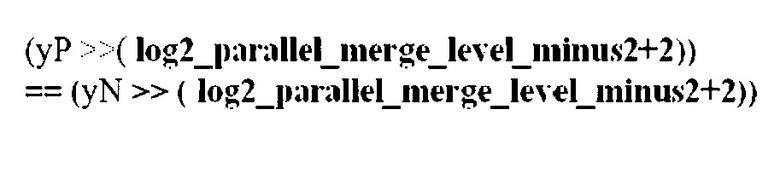
Вышеуказанные Выражение 1 и Выражение 2 являются примерами уравнений для определения того, находятся ли блок-кандидат на слияние и блок объекта предсказания в одной и той же MER. Кроме того, то, находятся ли блок-кандидат на слияние и блок объекта предсказания в одной и той же MER, можно определить с использованием способа, отличающегося от вышеописанного способа, до тех пор, пока это не отходит от сущности настоящего изобретения.
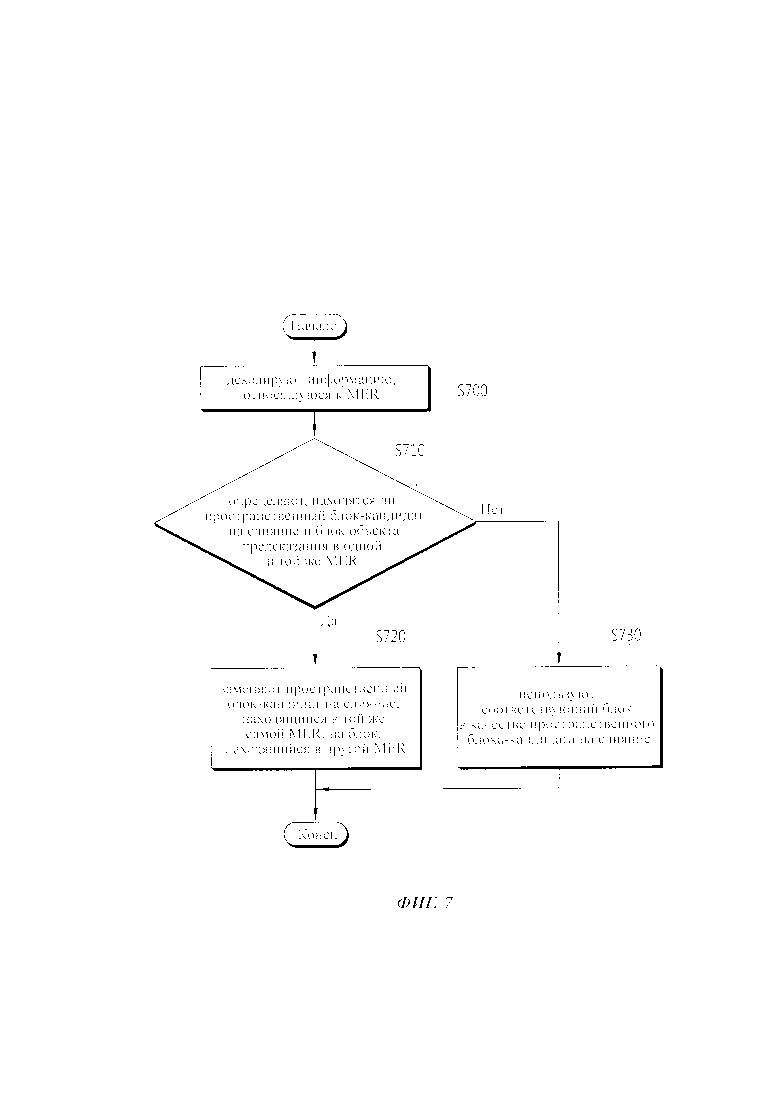
Фиг. 7 представляет собой алгоритм, иллюстрирующий способ получения пространственного блока-кандидата на слияние в режиме слияния в соответствии с примерным вариантом реализации настоящего изобретения.
Согласно фиг. 7, информацию, относящуюся к MER, декодируют (шаг S700).
Информация, относящаяся к MER, может быть информацией элемента синтаксиса, как было раскрыто выше, и может входить в структуру синтаксиса высокого уровня. На основании декодированной информации, относящейся к MER, можно определить, находятся ли пространственный блок-кандидат на слияние и блок объекта предсказания в одной и той же MER или в разных MER.
Определяют, находятся ли пространственный блок-кандидат на слияние и блок объекта предсказания в одной и той же MER (шаг S710).
В соответствии с примерным вариантом реализации настоящего изобретения, если блок-кандидат на слияние текущего блока и текущий блок находятся в одной и той же MER, то блок-кандидат на слияние текущего блока может быть исключен, а в качестве кандидата на слияние, в соответствии с размером текущего блока и размером MER, может быть добавлена информации о движении, по меньшей мере, одного блока с местоположением, отличающимся от блока-кандидата на слияние (шаг S720). В соответствии с другим примерным вариантом реализации настоящего изобретения, если пространственный блок-кандидат на слияние и блок объекта предсказания находятся в одной и той же MER, то вместо использования пространственного блока-кандидата на слияние, находящегося в данной MER в качестве блока-кандидата на слияние, для выполнения межкадрового предсказания данный пространственный блок-кандидат на слияние можно заменить блоком, находящимся в другой MER с другим местоположением.
Кроме того, в другом примерном варианте реализации настоящего изобретения, если пространственный блок-кандидат на слияние и блок объекта предсказания находятся в одной и той же MER, то пространственный блок-кандидат на слияние, находящийся в данной MER, может не использоваться в качестве блока-кандидата на слияние, как было раскрыто выше.
Если пространственный блок-кандидат на слияние и блок объекта предсказания не находятся в одной и той же MER, то межкадровое предсказание выполняют на основании соответствующего пространственного блока-кандидата на слияние (шаг S730).
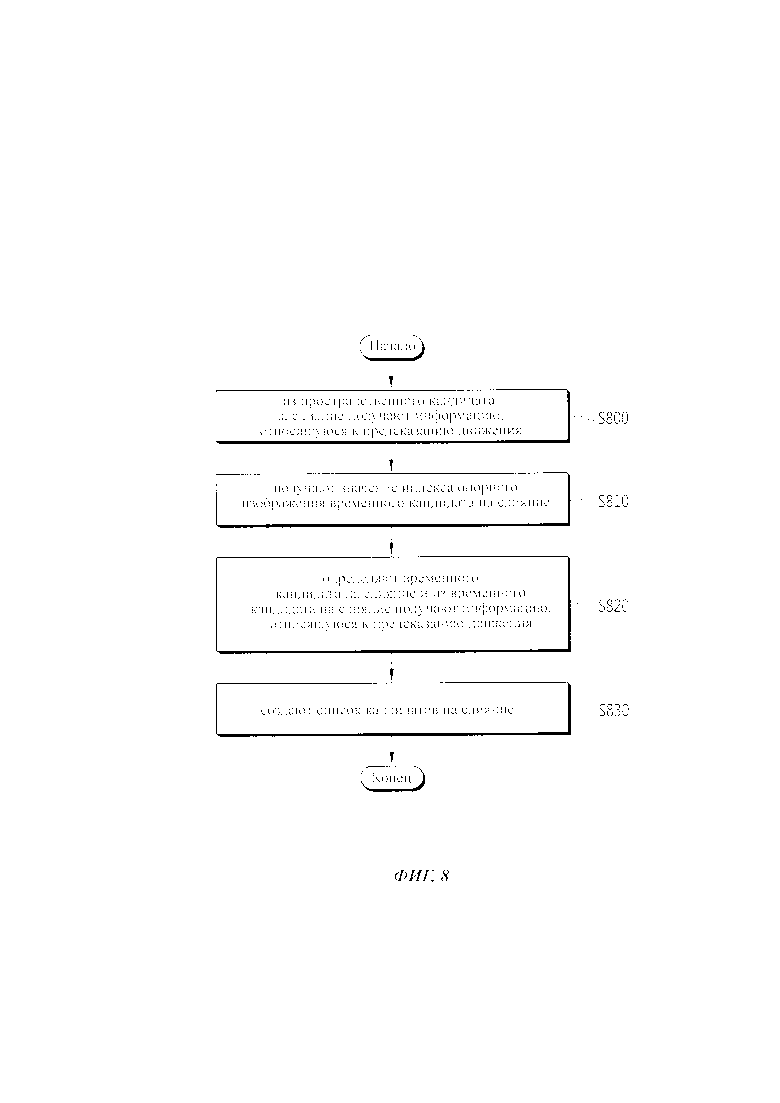
На фиг. 8 показан алгоритм, иллюстрирующий способ межкадрового предсказания с использованием режима слияния в соответствии с примерным вариантом реализации настоящего изобретения.
Согласно фиг. 8, из пространственного кандидата на слияние получают информацию, относящуюся к предсказанию движения (шаг S800).
Пространственный кандидат на слияние может быть получен из блока предсказания, соседнего для данного блока объекта предсказания. Для получения пространственного кандидата на слияние может быть предоставлена информация о ширине и высоте блока предсказания, информация MER, информация singleMCLFlag и информация о местоположении частей. На основании вышеуказанной входной информации, в соответствии с местоположением пространственного кандидата на слияние может быть получена информация (availableFlagN) о доступности пространственного кандидата на слияние, информация опорного изображения (refldxL0, refldxL1), информация использования списка (predFlagL0N, predFlagL1N) и информация вектора движения (mvL0N, mvL1N). Пространственный кандидат на слияние может быть совокупностью блоков, соседних для блока объекта предсказания.
В соответствии с примерным вариантом реализации настоящего изобретения, пространственный блок-кандидат на слияние может быть классифицирован в виде трех следующих: 1) пространственный блок-кандидат на слияние, не входящий в эту же самую MER и уже кодированный или декодированный, 2) пространственный блок-кандидат на слияние, входящий в эту же самую MER, и 3) пространственный блок-кандидат на слияние, в отношении которого кодирование и декодирование еще не выполнено.
В соответствии с примерным вариантом реализации настоящего изобретения, чтобы параллельно выполнять межкадровое предсказание в блоке данной MER, среди пространственных блоков-кандидатов на слияние для выполнения межкадрового предсказания в качестве пространственного блока-кандидата на слияние может использоваться пространственный блок-кандидат на слияние, который не входит в ту же самую MER и уже кодирован или декодирован. Далее, в качестве пространственного блока-кандидата на слияние может использоваться пространственный блок-кандидат на слияние, который заменяет местоположение пространственного блока-кандидата на слияние, входящего в ту же самую MER. Иначе говоря, в соответствии с примерным вариантом реализации настоящего изобретения, если блок-кандидат на слияние текущего блока входит в ту же самую MER, что и текущий блок, то блок-кандидат на слияние текущего блока исключается, и в качестве кандидата на слияние в соответствии с размером текущего блока и размером MER может быть добавлена информация о движении, по меньшей мере, одного блока с другим местоположением. Как раскрыто выше, способ определения блока-кандидата на слияние может выполняться посредством шага декодирования информации, относящейся к MER (области оценки движения), шага определения, находятся ли блок объекта предсказания и блок-кандидат на слияние в одной и той же MER, и шага определения того, что блок-кандидат на слияние недоступен для межкадрового предсказания с режимом слияния, если блок-кандидат на слияние и блок объекта предсказания находятся в одной и той же MER.
В соответствии с другим примерным вариантом реализации настоящего изобретения, среди пространственных блоков-кандидатов на слияние для выполнения межкадрового предсказания только пространственный блок-кандидат на слияние, который не находится в той же самой MER и уже кодирован или декодирован, может использоваться для выполнения межкадрового предсказания.
Получают значение индекса опорного изображения временного кандидата на слияние (шаг S810).
Значение индекса опорного изображения временного кандидата на слияние является значением индекса Col-изображения, содержащего временный кандидат на слияние (Col-блок), и может быть получено на основании конкретных условий, как раскрыто далее. Например, если верхняя левая точка блока объекта предсказания равна (хР, уР), ширина равна nPSW и высота блока объекта предсказания равна nPSH, то значение индекса опорного изображения временного кандидата на слияние может быть определено как то же самое значение, что и значение индекса опорного изображения соседнего блока предсказания (далее обозначаемого как «соседний блок предсказания для получения индекса опорного изображения»), если: 1) имеется соседний блок предсказания блока объекта предсказания, соответствующий местоположению (хР-1, yP+nPSH-1), 2) значение индекса разделения соседнего блока предсказания для получения индекса опорного изображения равно 0, 3) соседний блок предсказания для получения индекса опорного изображения не является блоком, который выполняет предсказание, используя режим внутрикадрового предсказания, и 4) блок объекта предсказания и соседний блок предсказания для получения индекса опорного изображения не входят в одну и ту же MER (область оценки движения). Если вышеуказанные условия не удовлетворяются, то значение индекса опорного изображения временного кандидата на слияние можно приравнять к 0.
Определяют временный кандидат на слияние, и из временного кандидата на слияние получают информацию, относящуюся к предсказанию движения (шаг S820).
Для определения временного блока-кандидата на слияние (Col-блок) и получения информации, относящейся к предсказанию движения, на основании определенного временного блока-кандидата на слияние (Col-блока), можно определить местоположение Col-блока, используемого для получения временного вектора предсказания движения, на основании таких условий, как, например, доступен ли Col-блок для блока объекта предсказания, или где местоположение блока объекта предсказания относится к LCU (например, находится ли местоположение блока объекта предсказания на нижней границе или правой границе относительно LCU). Через получение информации, относящейся к предсказанию движения, основанной на определенной информации опорного изображения Col-блока и информации вектора предсказания движения, из временного блока-кандидата на слияние (Col-блока) может быть получена информация, относящаяся к предсказанию движения.
Создают список кандидатов на слияние (шаг S830).
Список кандидатов на слияние может быть создан путем включения, по меньшей мере одного из пространственного кандидата на слияние и временного кандидата на слияние. Пространственный кандидат на слияние и временный кандидат на слияние, включенные в список кандидатов на слияние, могут быть упорядочены с фиксированным приоритетом.
Список кандидатов на слияние может быть создан путем включения фиксированного числа кандидатов на слияние. Если кандидатов на слияние недостаточно для формирования фиксированного числа кандидатов на слияние, то кандидат на слияние может быть сформирован путем объединения информации, относящейся к предсказанию движения кандидата на слияния, или список кандидатов на слияние может быть сформирован путем добавления нулевого вектора в качестве кандидата на слияние.
Как раскрыто выше, приведенный способ получения кандидата на слияние может использоваться не только в способе межкадрового предсказания с использованием режима слияния, но также и в режиме межкадрового предсказания с использованием режима пропуска, и этот примерный вариант реализации также входит в объем притязаний настоящего изобретения.
Поскольку настоящее изобретение раскрыто со ссылкой на примерные варианты его реализации, для специалиста в данной области техники будет очевидно, что могут быть сделаны различные изменения и модификации без отступления от сущности и объема настоящего изобретения, как определено в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2696301C2 |
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2696229C2 |
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2696304C2 |
| СПОСОБ ПОЛУЧЕНИЯ БЛОКА-КАНДИДАТА НА СЛИЯНИЕ И ИСПОЛЬЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2012 |
|
RU2576499C2 |
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2696237C2 |
| СПОСОБ И УСТРОЙСТВО ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2646384C1 |
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2716229C2 |
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2716563C2 |
| СПОСОБ И УСТРОЙСТВО ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2622849C1 |
| СПОСОБ И УСТРОЙСТВО ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2635235C1 |
Изобретение относится к области кодирования и декодирования видеосигнала на основе блока-кандидата на слияние. Технический результат заключается в повышении точности обработки видеосигнала. Технический результат достигается за счет формирования списка кандидатов на слияние для текущего блока предсказания с использованием блока кандидата на слияние, при этом блок-кандидат на слияние включает пространственный блок-кандидат на слияние и/или временной блок-кандидат на слияние, выполнения межкадрового предсказания текущего блока предсказания на основе списка кандидатов на слияние, пространственного блока-кандидат на слияние, включающий по меньшей мере один из соседних блоков, смежных с текущим блоком предсказания, при этом соседние блоки включают по меньшей мере один из числа левого соседнего блока, верхнего соседнего блока, верхнего правого соседнего блока, нижнего левого соседнего блока и верхнего левого соседнего блока, временного блока-кандидата на слияние, содержащийся в изображении, имеющем иной временной порядок в сравнении с текущим изображением, содержащим текущий блок предсказания, размера области оценки движения (MER) составляет 8×8, и размера блока кодирования составляет 8×8, то по меньшей мере один из соседних блоков заменяют блоком замены, расположенным вне MER. 4 з.п. ф-лы, 8 ил., 2 табл.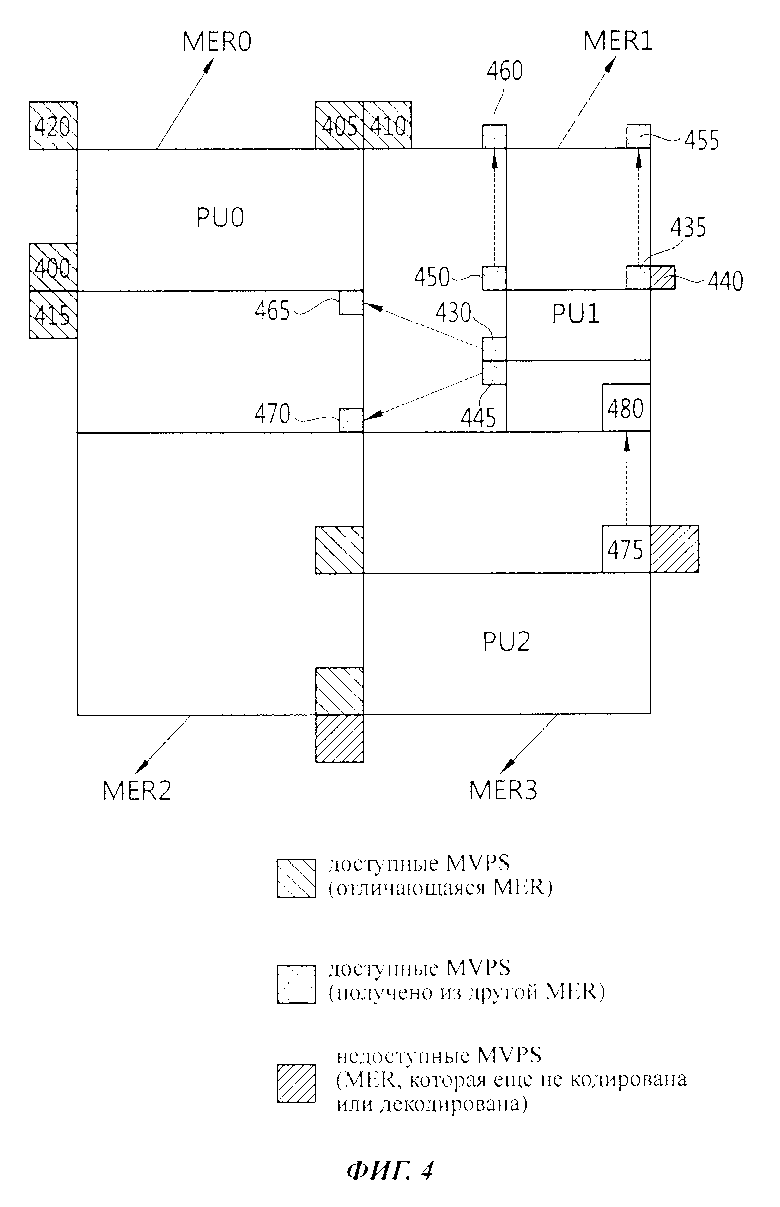
1. Способ декодирования видеосигнала на основе блока-кандидата на слияние, содержащий:
формирование списка кандидатов на слияние для текущего блока предсказания с использованием блока кандидата на слияние, при этом блок-кандидат на слияние включает пространственный блок-кандидат на слияние и/или временной блок-кандидат на слияние; и
выполнение межкадрового предсказания текущего блока предсказания на основе списка кандидатов на слияние,
причем пространственный блок-кандидат на слияние включает по меньшей мере один из соседних блоков, смежных с текущим блоком предсказания, при этом соседние блоки включают по меньшей мере один из числа левого соседнего блока, верхнего соседнего блока, верхнего правого соседнего блока, нижнего левого соседнего блока и верхнего левого соседнего блока,
временной блок-кандидат на слияние содержится в изображении, имеющем иной временной порядок в сравнении с текущим изображением, содержащим текущий блок предсказания,
а если размер области оценки движения (MER) составляет 8×8 и размер блока кодирования составляет 8×8, то по меньшей мере один из соседних блоков заменяют блоком замены, расположенным вне MER.
2. Способ по п. 1, отличающийся тем, что блок кодирования содержит текущий блок предсказания размером 8×4 или 4×8.
3. Способ по п. 1, отличающийся тем, что размер MER задан информацией уровня параллельного слияния, полученной из видеосигнала.
4. Способ по п. 1, отличающийся тем, что межкадровое предсказание каждого из блоков предсказания в MER выполняют параллельно.
5. Способ по п. 1, отличающийся тем, что временной блок-кандидат на слияние включает первый блок, содержащий ту же координату, что и нижний правый пиксель текущего блока предсказания в изображении, или второй блок, содержащий ту же координату, что и центральный пиксель текущего блока предсказания в изображении.
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛА И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛА | 2008 |
|
RU2427095C2 |
| СПОСОБ КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 1991 |
|
RU2132114C1 |
| СПОСОБ КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА С ИСПОЛЬЗОВАНИЕМ ВЗВЕШЕННОГО ПРЕДСКАЗАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2341035C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

