Изобретение относится к приводному механизму для привода линз с переменным фокусным расстоянием, содержащих выполненные с возможностью вздутия мембраны, которые ограничивают заполненную текучей средой полость, причем в линзах этого типа фокусное расстояние изменяется в зависимости от кривизны мембраны при ее вздутии.
Такие заполненные текучей средой линзы имеют множество различных применений. Одним из таких применений являются очки, в которых заполненные текучей средой линзы можно использовать для коррекции дальнозоркости. Дальнозоркость представляет собой состояние, которое возникает у людей при наступлении среднего возраста, когда у глаз снижается способность фокусироваться на близлежащих объектах. Это состояние прогрессирует и приводит к тому, что многим людям требуется коррекция зрения с тем, чтобы им было легче читать, при этом это состояние часто осложняется близорукостью или другими нарушениями зрения, что требует наличия разных очков, чтобы видеть на разных расстояниях. Например, человеку с близорукостью может потребоваться сферическая сила в минус 5 диоптрий с дополнительными плюс 2 диоптриями для обеспечения решения задач на близком расстоянии, таких как чтение. Дополнительные плюс 2 диоптрии компенсируют неспособность глаза фокусироваться для чтения. Заполненные текучей средой линзы могут быть использованы для коррекции дальнозоркости путем обеспечения пользователю возможности увеличивать степень вздутия мембран, когда он смотрит на объект, находящийся на близком расстоянии. Заполненная текучей средой линза может быть использована в комбинации с жесткой линзой для коррекции других нарушений, таких как близорукость, и может быть растянута только для того, чтобы обеспечить необходимую дополнительную оптическую силу.
Существует множество различных способов управления вздутием мембран в таких линзах. Например, в первом варианте можно регулировать объем резервуара, сообщающегося посредством текучей среды с линзой. По мере уменьшения объема резервуара происходит вытеснение избыточной текучей среды в линзу, что вызывает вздутие мембраны. Аналогичным образом, если объем резервуара снова увеличивается, то поверхностное натяжение в мембране вытесняет текучую среду обратно в резервуар, а мембрана возвращается в свою исходную форму. Каждая линза имеет отдельный резервуар.
Во втором варианте герметизированная линза имеет фиксированный объем текучей среды, занимающий полость, ограниченную мембраной. Размер полости можно изменять путем приложения приводного усилия, обычно в стратегических местах вокруг периферии линзы. Поскольку объем текучей среды является фиксированным, то мембрана должна растягивается с тем, чтобы вместить этот объем текучей среды, при этом происходит изменение оптической силы линзы. Обеспечение возможности ослабления линзы путем снятия приводного усилия вызывает то, что полость восстанавливает свой первоначальный размер, а мембрана возвращается к своей первоначальной форме.
В целом желательно регулировать оптическую силу обеих линз вместе, поскольку человеку, носящему очки, неудобно, если линзы регулируются по отдельности, так как это приводит к нечеткому зрению в одном глазу. Однако трудно обеспечить регулирование обеих линз вместе без ухудшения эстетической привлекательности оправы очков, несущей такие линзы. В оправе просто нет места для размещения системы управления, которая может приводить два резервуара согласно первому варианту.
Делались попытки обеспечить наличие механического рычажного механизма на перемычке оправы очков, который может прилагать приводное усилие к обеим линзам согласно второму варианту. Однако в результате получалась громоздкая и непривлекательная перемычка очков. Примеры такого типа приводной системы раскрыты в WO 2001/006302 и WO 2006/055366.
Существуют и другие возможные области применения, в которых желательно обеспечивать одновременную регулировку фокусных расстояний множества линз без увеличения объема оптической системы для размещения регулирующего механизма. Например, это требование является стандартным для объективов высокого оптического качества с переменным фокусным расстоянием, для которых требования к компактности становятся все более жесткими вследствие нарастающей потребности в компактных камерах и в камерах, встроенных в различные устройства, такие как мобильные телефоны.
В соответствии с первым аспектом изобретения предложен приводной механизм для одновременного привода первой и второй линз с переменным фокусным расстоянием, каждая из которых содержит выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от степени кривизны мембраны по мере ее вздутия, причем приводной механизм содержит гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с гидравлическим ведомым приводным устройством, связанным с первой линзой, и с гидравлическим ведомым приводным устройством, связанным со второй линзой, каждое ведомое приводное устройство выполнено с возможностью изменения степени вздутия мембраны связанной с ним линзы в ответ на срабатывание ведущего приводного устройства, а ведущее приводное устройство выполнено с возможностью срабатывания с тем, чтобы вызвать одновременное изменение степени вздутия мембран первой и второй линз.
В изобретении предусмотрено ведомое приводное устройство для каждой из первой и второй линз. Каждое из ведомых приводных устройств приводится в действие ведущим приводным устройством таким образом, что срабатывание ведущего приводного устройства приводит к тому, что каждое из ведомых приводных устройства оказывается приведено в действие вместе с другими. Таким образом, обеспечена возможность одновременного управления вздутием мембран, при этом использование гидравлического соединения между ведущим и ведомым приводными устройствами обеспечивает возможность передачи приводного усилия непосредственно на две линзы и не требует много места. Можно использовать гидравлические каналы очень малого диаметра, причем их траектория может в целом представлять собой змеевидную траекторию, что обеспечивает возможности установки гидравлического соединения между ведущим и ведомым приводными устройствами в компактных оптических системах. Например, гидравлическая система может быть установлена в очках таким образом, что нет необходимости в существенном увеличении размера перемычки и других частей оправы для размещения гидравлических каналов.
Каждое ведомое приводное устройство обычно выполнено с возможностью приложения необходимого усилия при заданном давлении текучей среды.
Гидравлическое ведущее приводное устройство может быть соединено с ведомыми приводными устройствами посредством прозрачной трубки, показатель преломления которой совпадает с показателем преломления текучей среды, заполняющей полости первой и второй линз.
Это приводит к тому, что гидравлическая трубка становится невидимой, когда она погружена в текучую среду, заполняющую полости. Поэтому трубки могут проходить внутри линз без создания оптического препятствия или могут быть полностью незаметными. Это сокращает пространство, занимаемое этими линзами, так как гидравлическая трубка не обязательно должна проходить вокруг кромки линз; и может облегчить изготовление очков без ободков с использованием, например, линз данного типа.
Предпочтительно показатель преломления текучей среды в гидравлических трубках совпадает с показателем преломления гидравлических трубок и текучей среды, заполняющей полости первой и второй линз. Это максимизирует эффект невидимости трубок. Для достижения этого текучая среда в трубках обычно является той же, что и текучая среда, заполняющая полости первой и второй линз.
Для обеспечения наличия гидравлического соединения между ведущим и ведомыми приводными устройствами можно использовать простые пластиковые трубки соответствующего размера. В другом варианте можно сформировать за одно целое полые каналы в соответствующих частях конструкции, в которой размещены первая и вторая линзы (например, для очков). Например, перемычка в очках может образовывать по меньшей мере часть канала, соединяющего ведущее приводное устройство с одним из ведомых приводных устройств.
Каждое гидравлическое ведомое приводное устройство может быть выполнено с возможностью изменения степени вздутия мембраны связанной с ним линзы в ответ на срабатывание ведущего приводного устройства путем приложения усилия к управляющему кольцу для управления изгибом, скрепленному с периферией мембраны. Это означает, что место приложения усилия находится на самом управляющем кольце для управления изгибом, при этом усилие прилагается либо непосредственно, либо через промежуточный элемент в виде слоя материала, либо через соответствующий соединительный элемент между каждым приводным устройством и управляющим кольцом для управления изгибом. Жесткость на изгиб управляющего кольца для управления изгибом изменяется в разных местах этого кольца, что заставляет мембрану принимать необходимый (например, сферический) профиль поверхности при приложении приводного усилия к выбранным местам привода.
Каждое гидравлическое ведомое приводное устройство расположено за пределами заполненной текучей средой полости связанной с ним линзы. Это облегчает уплотнение заполненной текучей средой полости, поскольку нет необходимости в том, чтобы гидравлические средства управления проникали в нее.
Каждое гидравлическое ведомое приводное устройство может быть выполнено с возможностью приложения приводного усилия по меньшей мере к одному месту привода, расположенному на связанной с ним линзе. В альтернативном варианте каждое гидравлическое ведомое приводное устройство может быть выполнено с возможностью приложения приводного усилия по меньшей мере к двум местам, расположенным на связанной с ним линзе. Место привода или каждое из мест привода может находиться на управляющем кольце для управления изгибом.
Первая и вторая линзы могут образовывать часть множества из трех или более линз с переменным фокусным расстоянием, каждая из которых содержит выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от степени кривизны мембраны по мере ее вздутия, приводной механизм содержит гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с множеством гидравлических ведомых приводных устройств, каждое из которых связано с соответствующей линзой и выполнено с возможностью изменения степени вздутия мембраны своей связанной с ним линзы в ответ на срабатывание ведущего приводного устройства, а ведущее приводное устройство выполнено с возможностью срабатывания с тем, чтобы вызывать одновременное изменение степени вздутия мембран всех линз.
Это можно использовать в ситуациях, в которых требуется одновременно регулировать фокусное расстояние более двух линз. Одним из возможных применений являются линзы, используемые для фокусировки рассеянного света от матриц светодиодов (LED), которые используют во многих современных осветительных приборах.
В соответствии со вторым аспектом изобретения предложен приводной механизм для первой линзы с переменным фокусным расстоянием, содержащей выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от кривизны мембраны по мере ее вздутия, приводной механизм содержит гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с первым множеством гидравлических ведомых приводных устройств, выполненных с возможностью изменения степени вздутия мембраны первой линзы в ответ на срабатывание ведущего приводного устройства.
Следовательно, изобретение обеспечивает простой способ передачи усилия от ведущего приводного устройства во множество мест, расположенных вокруг линзы согласно второму варианту, что обеспечивает возможность надлежащего управления вздутием линзы.
Каждое из первого множества гидравлических ведомых приводных устройств обычно размещено в соответствующем месте управления вокруг периферии первой линзы.
Это полезно при использовании линз согласно второму варианту, в котором уменьшение объема полости вызывает вздутие мембраны. Как объяснялось выше в нашей родственной заявке PCT/GB2012/051426, можно создать линзы этого типа таким образом, что они имеют некруглую форму, однако при этом мембрана при ее вздутии принимает сферический профиль поверхности. Это достигается благодаря использованию периферийной опоры, такой как управляющее кольцо для управления изгибом, прикрепленное к мембране, которая имеет переменную жесткость на изгиб, с тем чтобы вызывать принятие этой мембраной профиля сферической поверхности после приложении приводного усилия к стратегически выбранным местам. Следовательно, эти места управления могут быть выбраны таким образом, чтоб они совпадают с этими стратегически выбранными местами приложения приводного усилия.
Обычно приводное усилие, требующееся в каждом из выбранных мест управления, бывает различным. Следовательно, каждое ведомое приводное устройство в первом множестве ведомых приводных устройств обычно выполнено с возможностью приложения соответствующего необходимого усилия при заданном давлении текучей среды.
Этого можно достичь множеством различных способов. Например, площадь сечения поршня в каждом из ведомых приводных устройств может быть выбрана с тем, чтобы вызывать приложение необходимого усилия оказании заданного давления со стороны ведущего приводного устройства. В другом варианте ведущее приводное устройство может содержать множество поршней, каждый из которых имеет различные площади сечения для создания различного давления в каждом ведомом приводном устройстве, которое может в свою очередь содержать поршни с одинаковой площадью сечения, но при этом создавать различные приводные усилия. Это может быть выгодным в производстве, так как это обеспечивает возможность использования одного и того же ведомого приводного устройства в каждом месте управления несмотря на то, что ведущее приводное устройство является более сложным. Разумеется, оба этих подхода можно комбинировать.
В одном варианте осуществления изобретения гидравлическое ведущее приводное устройство соединено с ведомыми приводными устройствами из первого множества ведомых приводных устройств посредством прозрачных трубок, показатель преломления которых совпадает с показателем преломления текучей среды, заполняющей полость первой линзы. Это первое множество гидравлических ведомых приводных устройств может быть выполнено с возможностью совместного изменения степени вздутия мембраны первой линзы в ответ на срабатывание ведущего приводного устройства, так как каждый из них прикладывает усилие к управляющему кольцу для управления изгибом, прикрепленному к периферии мембраны первой линзы. Это означает, что места приложения усилия находятся на самом управляющем кольце, а усилие прилагается либо непосредственно, либо через промежуточный элемент из слоя материала, либо через соответствующие соединительные элементы, расположенные между каждым приводным устройством и управляющим кольцом. Жесткость на изгиб управляющего кольца для управления изгибом различна в различных местах этого кольца с тем, чтобы вызывать принятие мембраной необходимого профиля поверхности (например, сферического профиля поверхности) при приложении приводного усилия к выбранным местам привода.
Каждое из первого множества гидравлических ведомых приводных устройств расположено за пределами заполненной текучей средой полости первой линзы. Это облегчает уплотнение заполненной текучей средой полости, так как гидравлические средства управления не должны проникать в нее.
Это приводит к тому, что гидравлические трубки становятся невидимыми, когда они погружены в текучую среду, заполняющую полость. Поэтому трубки могут проходить внутри линзы, не создавая оптического препятствия или будучи совершенно незаметными. Это уменьшает пространство, занимаемое линзой, так как гидравлические трубки не обязательно должны проходить вокруг кромки линзы, а также может облегчить изготовление очков без ободков с использованием, например, данного типа линз.
Предпочтительно показатель преломления текучей среды в гидравлических трубках будет совпадать с показателем преломления гидравлических трубок и текучей среды, заполняющей полость первой линзы с переменным фокусным расстоянием. Это максимизирует эффект невидимости трубки. Для этого текучая среда в гидравлических трубках обычно бывает та же, что и текучая среда, заполняющая полость первой линзы с переменным фокусным расстоянием.
В предпочтительном варианте осуществления изобретения приводной механизм дополнительно содержит вторую линзу с переменным фокусным расстоянием, содержащую выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от кривизны мембраны по мере ее вздутия, а гидравлическое ведущее приводное устройство сообщается посредством текучей среды со вторым множеством гидравлических ведомых приводных устройств, выполненных с возможностью изменения степени вздутия мембраны второй линзы в ответ на срабатывание ведущего приводного устройства.
В этом предпочтительном варианте осуществления настоящее изобретение обеспечивает множество ведомых приводных устройств для каждой из первой и второй линз. Каждое из ведомых приводных устройств приведено в действие посредством ведущего приводного устройства таким образом, что срабатывание ведущего приводного устройства приводит к совместному приведению в действие каждого из ведомых приводных устройств. Поэтому обеспечена возможность одновременного управления вздутием мембран и, как и в первом аспекте изобретения, использование гидравлического соединения между ведущим и ведомым приводными устройствами обеспечивает возможность прямой передачи приводного усилия на две линзы без необходимости в слишком большом пространстве. Это обеспечивает возможность установления гидравлического соединения в компактных оптических системах, таких как очки, как и в первом аспекте изобретения.
Для обеспечения гидравлического соединения между ведущим и ведомым приводными устройствами можно использовать прямую пластиковую трубку надлежащего размера. В альтернативном варианте полые каналы могут быть сформированы за одно целое с образованием соответствующих частей конструкции, содержащей первую и вторую линзы (например, очков). Например, перемычка в очках может формировать по меньшей мере часть канала, соединяющего ведущее приводное устройство с ведомыми приводными устройствами.
Обычно каждое из второго множества гидравлических ведомых приводных устройств размещено в соответствующем месте управления вокруг периферии второй линзы.
Это полезно при использовании линз согласно второму варианту, в котором происходит уменьшение объема полости, что вызывает вздутие мембраны. Как объяснялось в нашей родственной заявке PCT/GB2012/051426, можно выполнить линзы этого типа таким образом, что они имеют некруглую форму, но при этом мембрана при вздутии принимает сферический профиль поверхности. Это достигается благодаря использованию периферийной опоры, прикрепленной к мембране и имеющей переменную жесткость на изгиб, с тем, чтобы мембрана, при приложении приводного усилия к стратегически выбранным местам, принимала сферический профиль поверхности. Следовательно, эти места управления можно выбирать таким образом, чтобы они совпадали с этими стратегически выбираемыми местами приложения приводного усилия.
Как правило, каждое ведомое приводное устройство во втором множестве ведомых приводных устройств выполнено с возможностью приложения соответствующего необходимого усилия при заданном давлении текучей среды, поскольку приводное усилие, требующееся в каждом из стратегически выбранных мест, обычно бывает различным.
В одном варианте осуществления изобретения гидравлическое ведущее приводное устройство соединено с ведомыми приводными устройствами из второго множества ведомых приводных устройств посредством прозрачных трубок, показатель преломления которых совпадает с показателем преломления текучей среды, заполняющей полость второй линзы.
Второе множество гидравлических ведомых приводных устройств может быть выполнено с возможностью совместного изменения степени вздутия мембраны второй линзы в ответ на срабатывание ведущего приводного устройства, поскольку каждый из них прикладывает усилие к управляющему кольцу для управления изгибом, прикрепленному к периферии мембраны второй линзы. Это означает, что место приложения усилия находится на самом управляющем кольце, а усилие прилагается либо непосредственно, либо через промежуточный элемент из слоя материала, либо через соответствующий соединительный механизм между каждым приводным устройством и управляющим кольцом. Жесткость на изгиб управляющего кольца для управления изгибом различна в разных местах этого кольца, что заставляет мембрану принимать необходимую форму профиля поверхности (например, сферическую форму профиля поверхности) при приложении приводного усилия к выбранным местам привода.
Каждое из второго множества гидравлических ведомых приводных устройств может быть расположено за пределами заполненной текучей средой полости второй линзы. Это облегчает уплотнение заполненной текучей средой полости, так как гидравлическим устройствам регулировки не нужно проникать в нее.
Это приводит к тому, что гидравлические трубки становятся невидимыми, когда они погружены в текучую среду, заполняющую полости. Поэтому трубки могут проходить внутри линз, не создавая оптического препятствия и будучи совершенно незаметными. Это уменьшает пространство, занимаемое линзами, так как гидравлические трубки не обязательно должны проходить вокруг кромки линз, а также может облегчить изготовление очков без ободков с использованием этого типа линз.
Предпочтительно показатель преломления текучей среды в гидравлической трубке совпадает с показателем преломления гидравлической трубки и текучей среды, заполняющей полости первой и второй линз. Это способствует невидимости трубки. Для этого текучая среда в гидравлических трубках обычно бывает та же, что и текучая среда, заполняющая полости первой и второй линз.
Первая и вторая линзы предпочтительного варианта осуществления изобретения могут составлять часть множества из трех или более линз с переменным фокусным расстоянием, каждая из которых содержит выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от кривизны мембраны по мере ее вздутия, а приводной механизм содержит гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с соответствующими множествами гидравлических ведомых приводных устройств, каждое из которых выполнено с возможностью изменения степени вздутия мембраны связанной с ними линзы в ответ на срабатывание ведущего приводного устройства. Это можно использовать в ситуациях, в которых необходимо одновременно регулировать фокусное расстояние более чем двух линз. Одно из возможных применений - линзы, используемые для фокусировки света от матриц светодиодов, которые используются во многих современных осветительных приборах.
Каждое из первого множества ведомых приводных устройств должно лежать на одном и том же контуре (т.е. на линии, проходящей вокруг мест, расположенных на одинаковом расстоянии от оптического центра линзы в направлении, параллельном оптической оси), если усилия, прикладываемые приводными устройствами, оказываются идентичными. В альтернативном варианте каждое из первого множества ведомых приводных устройств может лежать на соответствующем контуре, один или более из которых может отличаться от других, если каждое из приводных устройств приводится в действие так, что оно прилагает соответствующее усилие, зависящее от контура, на котором оно лежит. Этого можно достичь, например, путем использования приводных устройств с поршнями, имеющими различные площади сечения, для обеспечения соответствующих необходимых усилий при одних и тех же гидравлических давлениях.
Аналогичным образом, каждый из второго множества ведомых приводных устройств должен лежать на одном и том же контуре (т.е. на линии, проходящей вокруг мест, расположенных на одинаковом расстоянии от оптического центра линзы в направлении, параллельном оптической оси), если усилия, прикладываемые приводными устройствами, оказываются идентичными. В альтернативном варианте каждый из второго множества ведомых приводных устройств может лежать на соответствующем контуре, один или более из которых может отличаться от других, если каждое из приводных устройств приводится в действие так, что оно прилагает усилие, зависящее от контура, на котором оно лежит. Этого можно достичь, например, путем использования приводных устройств с поршнями, имеющими различные площади сечения, для обеспечения соответствующих необходимых усилий при одних и тех же гидравлических давлениях.
В третьем аспекте изобретения предложены очки, которые содержат оправу и приводной механизм согласно первому аспекту изобретения или предпочтительному варианту второго аспекта изобретения, где первая и вторая линзы установлены в оправе с образованием левой и правой линз очков.
В одном из вариантов осуществления изобретения степень вздутия мембраны первой линзы отличается от степени вздутия мембраны второй линзы при заданном срабатывании ведущего приводного устройства. Это позволяет тому, кто носит очки, использовать технологию, известную как монозрение. В этой технологии фокусное расстояние одной линзы регулируется для коррекции зрения соответствующего глаза для зрения на близком расстоянии (для облегчения чтения), а фокусное расстояние другой линзы регулируется для коррекции зрения второго глаза для зрения на дальнем расстоянии (для способствования нормальному зрению) или для зрения на среднем расстоянии (например, когда смотрят на монитор). Люди способны адаптироваться к этому достаточно быстро и видеть объекты в фокусе в широком диапазоне расстояний, хотя при этом теряется восприятие глубины.
В четвертом аспекте изобретения предложен объектив с переменным фокусным расстоянием, содержащий множество групп оптических элементов, включающее фокусную группу и вариаторную группу, находящиеся на одной оптической оси, причем объектив с переменным фокусным расстоянием содержит приводной механизм согласно первому аспекту изобретения или предпочтительному варианту второго аспекта изобретения, а первая и вторая линзы составляют соответственно часть фокусной и вариаторной групп.
В сложных конструкциях из линз, таких как фотографические объективы, отдельные оптические элементы (т.е. отдельные линзы) расположены группами. Оптические элементы в группе обычно соединены вместе и действуют как одно целое. Разумеется, в группе может быть и только один оптический элемент.
В типичном объективе с переменным фокусным расстоянием фокусная группа совершает перемещение вдоль оптической оси объектива для фокусирования изображения на необходимую фокальную плоскость, например на пленку или цифровой датчик. Вариаторная группа совершает перемещение вдоль оптической оси для изменения увеличительной силы фокусной группы; она в большой степени ответственна за регулирование фокусного расстояния объектива. При обеспечении одновременного перемещения первой и второй линз, можно создать объектив с переменным фокусным расстоянием с очень низким требованием к дополнительному объему (если он вообще требуется), что не требует какого-либо перемещения фокусной и вариаторной групп вдоль оптической оси. Часто необходимое изменение фокусного расстояния фокусной и вариаторной групп для получения необходимого изменения фокусного расстояния объектива не одинаково, но с этим легко справиться путем использования различных приводных усилий в ведомых приводных устройствах, когда используется приводная система согласно первому или второму аспекту изобретения.
Обычно требуется, чтобы фокусная и вариаторная группы совершали перемещение вдоль оптической оси в противоположных направлениях. Другими словами, изменение фокусного расстояния каждой группы обычно обязательно должно происходить в противоположных направлениях. Таким образом, когда используется приводной механизм согласно предпочтительному варианту осуществления второго аспекта изобретения или первому аспекту изобретения, объектив с переменным фокусным расстоянием может дополнительно содержать гидравлический инвертор с тем, чтобы вызывать противоположные изменения фокусных расстояний первой и второй линз. Гидравлический инвертор может быть расположен между ведущим приводным устройством и ведомым приводным устройством, связанным с первой или второй линзой. Выбор местоположения зависит от конструкции объектива.
Ниже описываются варианты осуществления изобретения с ссылками на прилагаемые чертежи, на которых:
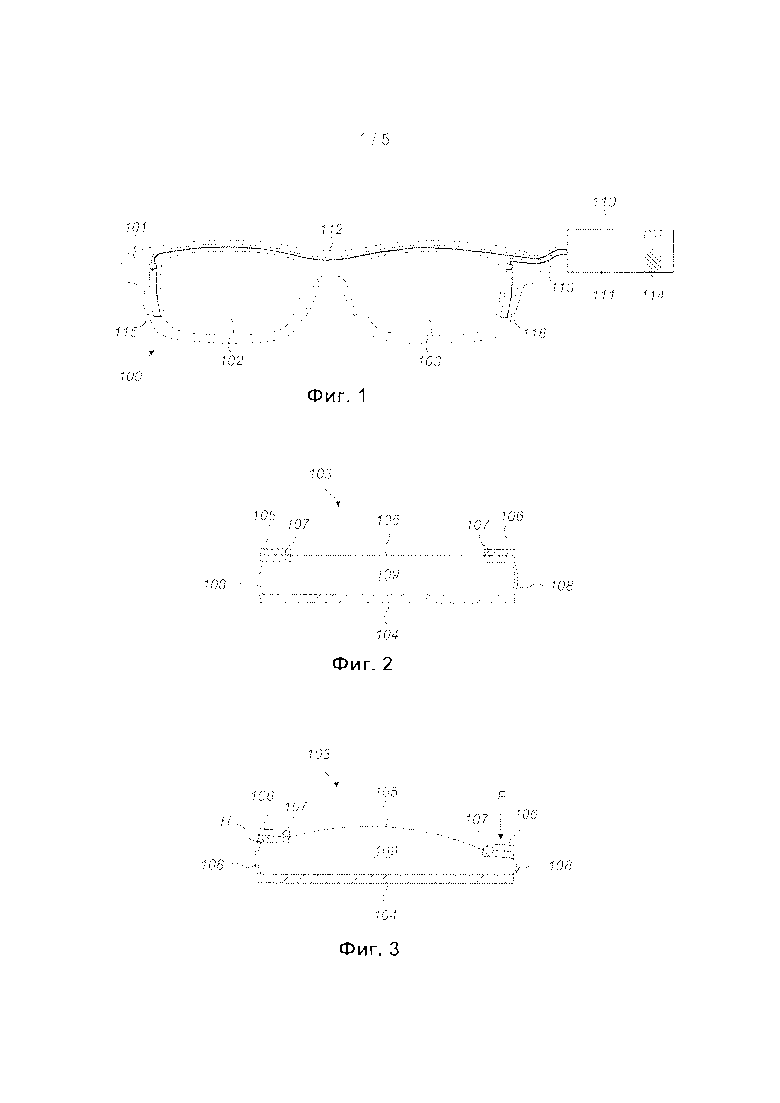
На фиг. 1 показан первый вариант осуществления изобретения, в котором две линзы приводятся одним и тем же гидравлическим приводным устройством;
На фиг. 2 показано поперечное сечение через одну из линз, показанных на фиг. 1, когда гидравлическое приводное устройство находится в первом положении;
На фиг. 3 показано поперечное сечение через одну из линз, показанных на фиг. 1, когда гидравлическое приводное устройство находится во втором положении;
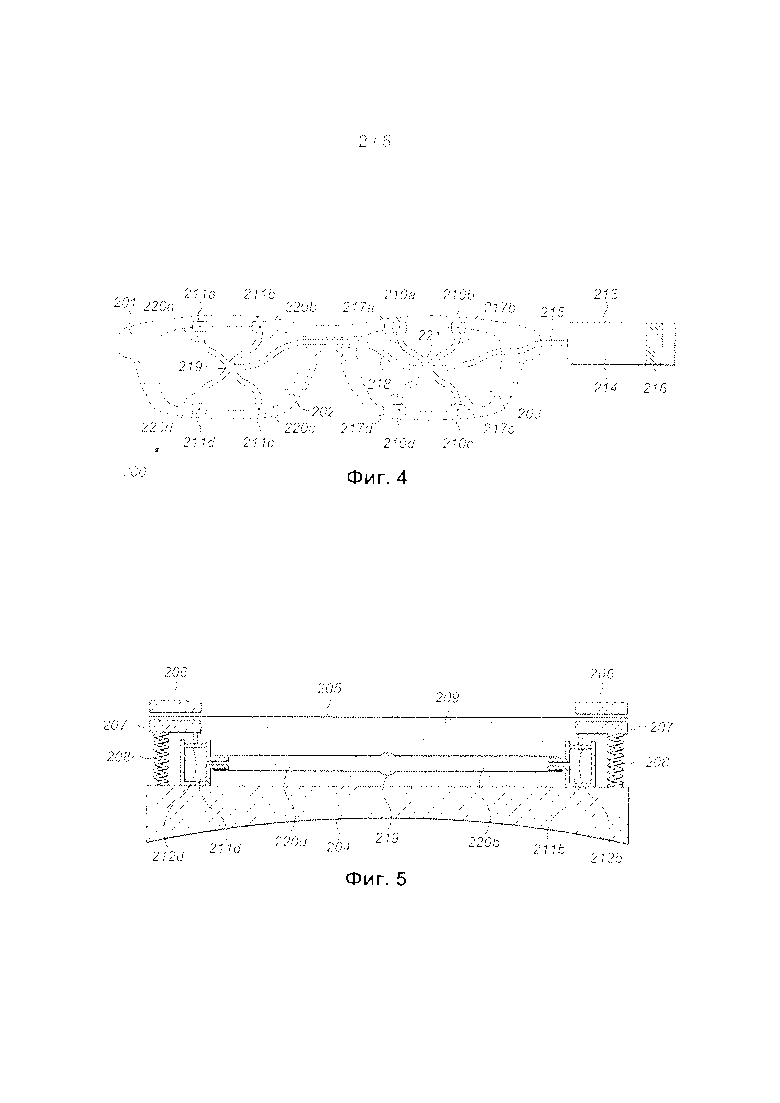
На фиг. 4 показан второй вариант осуществления изобретения, в котором две линзы приводятся гидравлически в многочисленных местах привода;
На фиг. 5 показано поперечное сечение через одну из линз, показанных на фиг. 4, когда гидравлическое приводное устройство находится в первом положении;
На фиг. 6 показано поперечное сечение через одну из линз, показанных на фиг. 4, когда гидравлическое приводное устройство находится во втором положении;
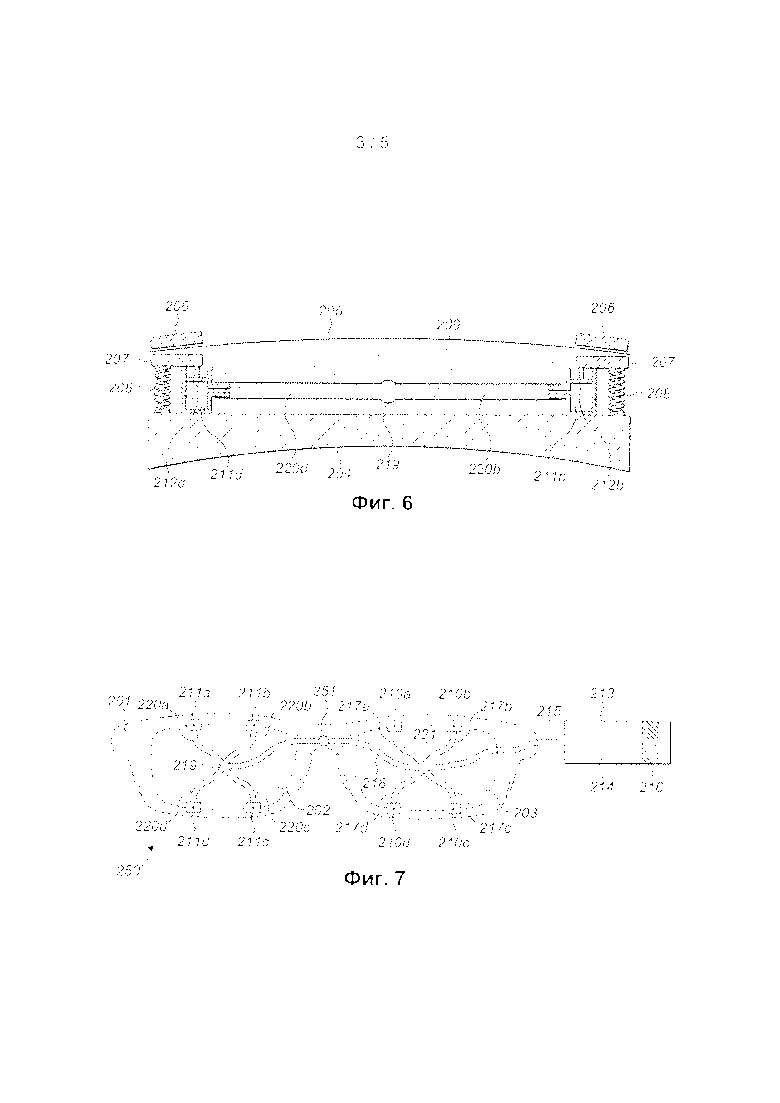
На фиг. 7 показана разновидность второго варианта осуществления изобретения, имеющая изолирующий клапан или ограничитель между двумя линзами;
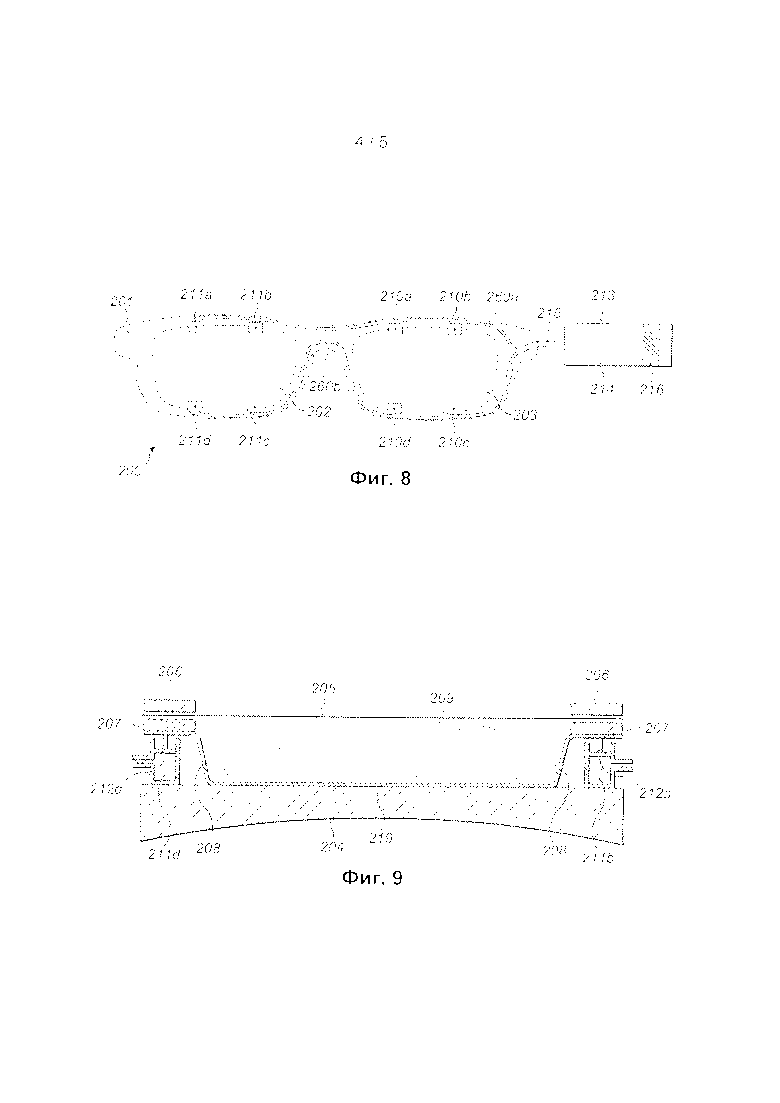
На фиг. 8 показана разновидность второго варианта осуществления изобретения, в которой приводные устройства расположены за пределами полостей линзы;
На фиг. 9 показано поперечное сечение через одну из линз, показанных на фиг. 8; и
На фиг. 10 показан объектив с переменным фокусным расстоянием, соответствующий настоящему изобретению.
На фиг. 1-3 показан первый вариант осуществления изобретения, в котором применен другой приводной механизм, причем в этом варианте отсутствует сообщение посредством текучей среды между самими линзами или между линзами и гидравлическим приводным механизмом. На фиг. 1 показаны очки, содержащие оправу 101, в которой установлены две линзы 102 и 103. Эти две линзы 102 и 103 являются зеркальными отражениями друг друга. Разрез, выполненный по линзе 103, показан на фиг. 2 и 3. Разрез, выполненный по линзе 102, не показан, так как линза 102 является просто зеркальным отражением линзы 103, а конструкцию линзы 102 можно легко понять из фиг. 2 и 3 без необходимости в дополнительных объяснениях. Линза 103 содержит тарелкообразный элемент 104 и гибкую мембрану 105, расположенную напротив задней поверхности тарелкообразного элемента 104. Задняя поверхность тарелкообразного элемента 104 может быть выполнена плоской (как показано) или может иметь одну или более криволинейных поверхностей для обеспечения оптической силы. Гибкая мембрана 105 закреплена между парой опорных колец 106, 107, а опорное кольцо 107 соединено с тарелкообразным элементом 104 посредством его сжимаемой упругой боковой стенки 108.
Тарелкообразный элемент 104 вместе с гибкой мембраной 105 образует полость 109. Полость 109 наполнена текучей средой с высоким показателем преломления, такой как силиконовое масло. Тарелкообразный элемент 104 и гибкая мембрана 105 выполнены из прозрачных материалов. Например, они могут быть выполнены из силиконового материала с высоким молекулярным весом. В альтернативном варианте тарелкообразный элемент 104 может быть выполнен путем совместного формования боковой стенки 108 из силиконового эластомера с высоким молекулярным весом с поликарбонатной подложкой для задней поверхности.
Линза 103 показана на фиг. 2 в состоянии, в котором не осуществлен привод и в котором она обеспечивает малую или нулевую оптическую силу, так как мембрана 105 выполнена по существу плоской. С другой стороны, на фиг. 3 линза 103 показана на фиг. 3 в состоянии, в котором осуществлен привод и в котором мембрана 105 оказывается вздутой с тем, чтобы принять криволинейный профиль. При таком профиле она обеспечивает величину оптической силы, зависящую от радиуса кривизны. Линза 103 переводится из состояния, в котором не осуществлен привод, в состояние, в котором осуществлен привод, путем приложения усилия к опорному кольцу 106 на одной стороне линзы 103, как показано стрелкой F. Это вызывает то, что боковая стенка 108 сжимается под областью, в которой приложено усилие F, что уменьшает объем полости 109. Боковая стенка не сжимается на стороне, противоположной области, в которой приложено усилие F, поскольку обеспечена возможность жесткого удержания этой стороны и возможность ее функционирования в качестве шарнира, что показано посредством точки Н шарнира на фиг. 3. Вследствие уменьшения объема в полости 109 давление текучей среды вызывает вздутие гибкой мембраны 105, как показано на фиг. 3. Усилие F прикладывается механическим приводным устройством, как описано ниже. Путем тщательного выбора места приложения усилия F и места расположения точек Н шарнира вместе с правильно выполненными опорными кольцами 106 и 107 можно обеспечить вздутие мембраны 105 с принятием сферического профиля, несмотря на то, что линза имеет приблизительно прямоугольную форму. Способ, которым это достигается, не входит в объем защиты настоящего изобретения, но описан в нашей родственной заявке PCT/GB2012/051426.
Для управления величиной усилия F, прикладываемого механическим приводным устройством, используют гидравлическое приводное устройство 110 (показано схематически на чертежах). Гидравлическое приводное устройство 110 имеет камеру 111, открытую на одном конце, на котором эта камера соединена с трубками 112 и 113, и уплотненную на другом конце поршнем 114. Поршень 114 может свободно перемещаться вдоль корпуса механического приводного устройства 110, что обеспечивает изменение объема камеры 111 и, следовательно, объема текучей среды, которую эта камера может содержать. Для регулировки положения поршня 114 вдоль корпуса механического приводного устройства 110 предусмотрен орган управления, например, маховик или ползун.
Трубки 112 и 113 проходят сквозь оправу 101 и соединены с соответствующими механическими приводными устройствами 115 и 116. Каждое из механических приводных устройств 115 и 116 содержит поршень, который совершает перемещение в ответ на изменения гидравлического давления, вызванные перемещением поршня 114. Поршни в приводных устройствах 115 и 116 соединены с соответствующими механическими передачами, которые прилагают усилие F к опорному кольцу 106 и к эквивалентному опорному кольцу в линзе 102. Таким образом, перемещение поршня 114 изменяет усилие, прикладываемое к опорным кольцам в линзах 102 и 103, и степень вздутия гибких мембран. Поршень 114 может принимать любое положение между двумя концами камеры 111, показанной на фиг. 1. Таким образом, кривизну гибких мембран в линзах 102 и 103 можно регулировать до любого радиуса между двумя крайними значениями, показанными для мембраны 105 на фиг. 2 и 3.
Фигуры 4-6 относятся ко второму варианту осуществления изобретения. Во втором варианте осуществления изобретения использована модификация приводного механизма согласно первому варианту осуществления изобретения, который описан выше со ссылкой на фиг. 1-3. На фиг. 4 показаны очки 200, содержащие оправу 201, в которой установлены две линзы 202 и 203. Эти две линзы 202 и 203 являются зеркальными отражениями друг друга. Разрез, выполненный по линзе 202, показан схематически на фиг. 5 и 6. Разрез, выполненный по линзе 203, не показан, так как линза 203 представляет собой просто зеркальное отражение линзы 202, так что конструкцию линзы 203 можно понять из фиг. 5 и 6 без необходимости в дополнительных объяснениях. Линза 202 содержит задний оптический элемент 204 и гибкую мембрану 205, расположенную напротив заднего оптического элемента 204. Задний оптический элемент 204 может быть выполнен плоским или может представлять собой криволинейную заднюю поверхность, как показано, для обеспечения оптической силы. Гибкая мембрана 205 удерживается между парой опорных колец 206, 207, а опорное кольцо 207 установлено на заднем оптическом элементе 204 с помощью сжимаемого упругого элемента 208, проходящего от заднего оптического элемента 204. На практике этот сжимаемый упругий элемент 208 может представлять собой боковую стенку (аналогично боковой стенке 104, описанной со ссылкой на фиг. 1-3), что обеспечивает уплотнение мембраны 205 и заднего оптического элемента 204.
Боковая стенка может быть выполнена из силиконового эластомера с высоким молекулярным весом и сформована вместе с задним оптическим элементом 204, выполненным, например, из поликарбоната. Таким образом, задний оптический элемент 204 и гибкая мембрана 205 выполнены из прозрачных материалов с высоким показателем преломления. Задний оптический элемент 204 вместе с гибкой мембраной 205 образуют полость 209. Полость 209 заполнена текучей средой с высоким показателем преломления, такой как силиконовое масло.
Линза 202 показана на фиг. 5 в состоянии, в котором не осуществлен привод и в котором она обеспечивает нулевую или малую оптическую силу, так как мембрана 205 выполнена по существу плоской. С другой стороны, линза 202 показана на фиг. 6 в состоянии, в котором осуществлен привод и в котором мембрана 205 оказывается вздутой с принятием криволинейного профиля. При таком профиле эта мембрана обеспечивает оптическую силу, зависящую от радиуса кривизны. Способ, согласно которому линза 202, показанная на фиг. 5 и 6, переходит между состоянием, в котором осуществлен привод, и состоянием, в котором не осуществлен привод, аналогичен способу, используемому для линзы 103, показанной на фиг. 2 и 3. В этом случае к опорному кольцу 207 прикладывается усилие (несмотря на то, что усилие вместо этого может быть приложено к опорному кольцу 206, как в случае с линзой 103) для того, чтобы тянуть его по направлению к заднему оптическому элементу 204 против действия восстанавливающего усилия, оказываемого упругим элементом 208. В данном случае это усилие может быть приложено каждым из множества приводных устройств 210a-d. Соответствующие приводные устройства 211a-d обеспечены для линзы 202. Это вызывает сжатие упругого элемента 208 с обеспечением максимального сжатия вокруг приводных устройств 210a-d, что обеспечивает уменьшение объема полости 209. Вследствие уменьшения объема в полости 209 давление текучей среды вызывает вздутие гибкой мембраны 205, как показано на фиг. 3. Степень сжатия в других местах вокруг опорных колец 206 и 207 зависит от их конструкции, которая может быть реализована в соответствии с принципами, описанными в PCT/GB2012/051426, для обеспечения вздутия мембраны 205 с принятием сферического профиля, несмотря на ее приблизительно прямоугольную форму. Не обеспечено наличие шарнирных точек для жесткого удержания упругого элемента 208 в различных областях, как это реализовано в вышеописанном случае с боковой стенкой 108; вместо этого обеспечена возможность активного управления отклонением опорных колец 206, 207 во множестве стратегически выбранных мест вокруг их периферии. В результате получается легче управляемая и улучшенная форма вздутой мембраны 205. Приводные устройства 210a-210d могут прикладывать одно и то же усилие, или каждый из этих приводных устройств может быть выполнен с возможностью прикладывания соответствующего различного усилия. Это достигается путем обеспечения наличия поршней (два из которых показаны ссылочными номерами 212b и 212d на фиг. 5 и 6) в приводных устройствах с надлежащими площадями поверхности, так что в приводных устройствах приложено необходимое усилие при заданном гидравлическом давлении.
Гидравлическое приводное устройство 213 (схематически показано на чертежах) использовано для управления гидравлическим давлением, действующим на поршни в приводных устройствах 210a-d и 211a-d. Гидравлическое приводное устройство 213 имеет камеру 214, открытую на одном конце, на котором она соединена с трубкой 215, и уплотненную поршнем 216 на другом конце. Поршень 216 может свободно перемещаться вдоль корпуса гидравлического приводного устройства 213, что обеспечивает изменение объема камеры 214 и, следовательно, объема текучей среды, которую она может содержать. Для регулирования положения поршня 216 вдоль корпуса гидравлического приводного устройства 213 предусмотрен орган управления, например, маховик или ползун.
Трубка 215 проходит через оправу 201 в полость линзы 203, где она разделяется в месте 221 соединения на трубки 217a-d, которые соединены с соответствующими приводными устройствами 210a-d, и на трубку 218. Трубка 218 выходит из полости линзы 203 через перемычку оправы 201 в полость 209 линзы 202 до места 219 соединения. В месте 219 соединения трубка 218 соединена с трубками 220a-d, которые соединены с соответствующими приводными устройствами 211a-d. Таким образом, любое изменение гидравлического давления, вызванное перемещением поршня 216 в гидравлическом приводном устройстве 213, будет вызывать соответствующее изменение усилия, прикладываемого каждым из поршней в приводных устройствах 210a-d и 211a-d, которые передают это усилие на опорные кольца, удерживающие каждую мембрану. Таким образом, перемещение поршня 216 изменяет усилие, прикладываемое к опорным кольцам в линзах 202 и 203, и степень вздутия гибких мембран. Поршень 216 может занимать любое положение между двумя концами камеры 214, показанной на фиг. 4. Таким образом, можно регулировать кривизну гибких мембран в линзах 202 и 203 с обеспечением любого радиуса между двумя крайними величинами, показанными для мембраны 205 на фиг. 5 и 6. Трубки, используемые для создания трубок 215, 217a-d, 218 и 220a-d, выполнены из материала, который имеет показатель преломления, совпадающий с показателем преломления силиконового масла, используемого для заполнения полостей линз 202 и 203. Пригодным материалом для трубок является лексан 8010 (Lexan), имеющий показатель преломления около 1,5858 (при 20°C и 589,3 нм); силиконовое масло типа DC-705, выпускаемое компанией «Dow Corning Corporation» (г. Мидленд, штат Мичиган, США) и имеющее показатель преломления (1,5805, также при 20°C и 589,3 нм), который очень точно совпадает с показателем преломления указанного материала, что обеспечивает то, что трубки из лексана 8010 (Lexan) становятся невидимыми при погружении в масло. Гидравлическая текучая среда, использованная в гидравлической системе гидравлического приводного устройства 213, трубках 215, 217a-d, 218 и 220a-d, а также в приводных устройствах 210a-d и 211a-d, представляет собой то же силиконовое масло, которое использовано для заполнения полостей линз 202 и 203, и, следовательно, имеет такой же показатель преломления. Поскольку трубки имеют тот же показатель преломления, что и текучая среда, окружающая и заполняющая эти трубки, они становятся невидимыми в линзах 202 и 203. Однако, поскольку трубки могут быть направлены через внутреннюю часть линз 202 и 203, они не занимают наружного пространства вокруг линз 202 и 203, что обеспечивает возможность установки этих линз в более тонкие оправы, возможно без ободков.
На фиг. 7 показана разновидность второго варианта осуществления изобретения, причем в этой разновидности очки 250 имеют все из признаков очков 200 согласно второму варианту реализации, описанному выше со ссылкой на фиг. 4-6. Однако эти очки дополнительно содержат клапан 251 для ограничения потока в трубке 218 между местами 221 и 219 соединения. Этот клапан можно регулировать с тем, чтобы вызывать перемещение приводных устройств 211a-d с другой (более медленной) скоростью по сравнению с приводными устройствами 210a-d для заданной регулировки поршня 216 в гидравлическом приводном устройстве 213. В крайнем положении клапан 251 для ограничения потока может полностью ограничивать поток текучей среды вдоль трубки 218, так что приводные устройства 211a-d совсем не будут реагировать на регулировку поршня 216.
Это обеспечивает возможность использования технологии монозрения, о которой говорилось выше. При этом для применения данной технологии поршень 216 используется для регулировки приводных устройств 211a-d, так что соответствующая мембрана регулирует вздутие, требуемое для получения необходимой оптической силы для правого глаза. Клапан 251 для ограничения потока затем закрывается для уплотнения трубки 18 и поршня 216, используемого для регулировки приводных устройств 210a-d, так что соответствующая мембрана принимает степень вздутия, требуемую для получения необходимой оптической силы для левого глаза. Оптическую силу мембраны для левого глаза можно свободно регулировать без оказания влияния на оптическую силу мембраны для правого глаза.
На фиг. 8 и 9 показана разновидность варианта осуществления изобретения, представленного на фиг. 4-6, где приводные устройства 210a-d и 211a-d расположены за пределами полостей линз. Части, идентичные частям на фиг. 4-6, обозначены теми же ссылочными номерами.
Как видно на фиг. 9, боковая стенка 208 аналогична использовавшейся в варианте изобретения, показанном на фиг. 1-3. Задний оптический элемент 204 и боковая стенка 208 вместе образуют тарелкообразный элемент, который может быть выполнен совместным формованием боковой стенки 208 из силиконового эластомера с высоким молекулярным весом с поликарбонатной подложкой для заднего оптического элемента 204.
Приводные устройства 210a-210d и 211а-211d (из которых на фиг. 9 видны только приводные устройства 212b и 212d) выполнены таким образом, что они могут прикладывать усилие к выбранным местам опорного кольца 207. Приводные устройства 210a-210d и 21 1a-211d могут опираться на опорное кольцо 207 через боковую стенку 208, или же в боковой стенке 208 может быть образовано вспомогательное отверстие таким образом, что приводные устройства 210a-210d и 211a-211d могут опираться непосредственно на опорное кольцо 207. Как объяснялось выше, опорное кольцо 207 выполнено таким образом, что его жесткость на изгиб изменяется по его окружности таким образом, что когда к выбранным местам приложено приводное усилие, кольцо 207 деформируется таким образом, что прикрепленная к нему мембрана 205 будет принимать необходимый профиль, который обычно представляет собой сферический профиль.
Благодаря конструкции, показанной на фиг. 9, приводные устройства 210a-210d и 211a-211d можно расположить за пределами полостей линз 202 и 203. Это упрощает уплотнение линз 202 и 203, а также упрощает сборку этих линз 202 и 203, поскольку линзы 202 и 203 можно поставлять как готовые модули на производственную линию для прикрепления других частей, таких как приводные устройства 210a-210d и 211a-211d. Приводные устройства 210a-210d и 211a-211d могут быть гидравлические соединены с гидравлическим приводным устройством 213 множеством различных способов, например, так, как показано на фиг. 8. В этом случае трубка 215 раздваивается на трубку 260а, которая соединена с каждым из приводных устройств 210а, 210b, 211а и 211b, и трубку 260b, которая соединена с каждым из этих приводных устройств 210c, 210d, 211c и 211d. Трубки 260а и 260b могут проходить через каналы, образованные в оправе 201.
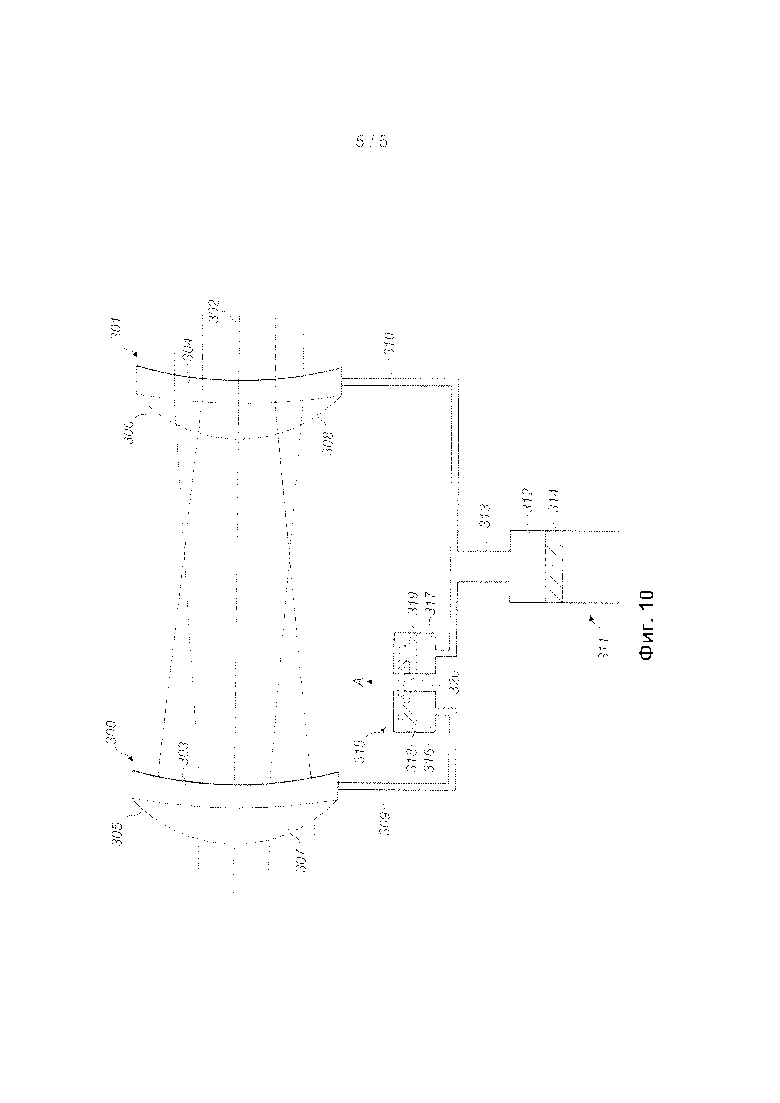
На фиг. 10 показано другое применение изобретения, а именно применение в объективе с переменным фокусным расстоянием. Объектив с переменным фокусным расстоянием содержит две линзы, в частности фокусную линзу 300 и вариаторную линзу 301, находящиеся на одной оптической оси 302. В практическом варианте осуществления изобретения эти две линзы 300 и 301 обычно составляют часть соответствующих групп оптических элементов, известных как фокусная группа и вариаторная группа. Фокусная линза 300 и вариаторная линза 301 являются активными элементами в этих группах и отвечают за управление фокусным расстоянием своей соответствующей группы для управления общим фокусным расстоянием объектива с переменным фокусным расстоянием.
В обычном объективе с переменным фокусным расстоянием при его регулировке о фокусная и вариаторная группы перемещаются вдоль его оптической оси. Вариаторная группа управляет общим увеличением фокусной группы, которая фокусирует изображение на фокальную плоскость. Однако при использовании данной конструкции вариаторная и фокусная группы не обязательно должны перемещаться вдоль оптической оси, так как изменением фокусного расстояния можно управлять путем регулировки давления текучей среды в линзах 300 и 301.
Каждая из фокусной и вариаторной линз 300 и 301aналогична по конструкции заполненным текучей средой линзам, описанным согласно другим вариантам осуществления изобретения. Они показаны на фиг. 10 лишь схематически, однако видны характерные признаки каждой линзы. В частности, каждая линза имеет задний оптический элемент 303 и 304 и гибкую выполненную с возможностью вздутия мембрану 305 и 306. Задние оптические элементы 303 и 304 могут быть выполнены плоскими, однако в данном случае они имеют криволинейные передние и задние поверхности для обеспечения некоторой степени оптической силы, когда мембраны 305 и 306 не являются вздутыми.
Мембрана 305 и задний оптический элемент 303 образуют полость 307 в фокусной линзе 300, которая заполнена текучей средой. Аналогичным образом мембрана 306 и задний оптический элемент 304 образуют полость 308 в вариаторной линзе 301, которая также заполнена текучей средой. Давление текучей среды в каждой полости 307 и 308 регулирует степень вздутия мембран 305 и 306 и, следовательно, оптическую силу, обеспечиваемую линзами 300 и 301.
Две полости 307 и 308 сообщаются посредством текучей среды с приводной системой через соответствующие гидравлические трубки 309 и 310. Гидравлическая приводная система содержит гидравлическое приводное устройство 311. Гидравлическое приводное устройство 311 имеет камеру 312, открытую на одном конце, на котором она соединена с трубкой 313, и уплотненную поршнем 314 на другом конце. Поршень 314 может свободно перемещаться вдоль корпуса гидравлического приводного устройства 311, что обеспечивает изменение объема камеры 312 и, следовательно, объема текучей среды, который эта камера может содержать. Для регулирования положения поршня 314 вдоль корпуса гидравлического приводного устройства 311 предусмотрен орган управления, например, маховичок или ползун.
Несмотря на то, что трубка 310 показана соединенной непосредственно с трубкой 313, в других вариантах реализации в трубке 310 может быть обеспечено наличие гидравлической передачи. Это может быть обеспечено посредством пары поршней, связанных вместе таким образом, что они оба совершают перемещение вместе, так что увеличение давления текучей среды на один поршень увеличивает давление текучей среды, оказываемое другим поршнем. Путем надлежащего выбора площадей поршней (т.е. так, чтобы площадь поршня, расположенного ближе к линзе 301, была меньше площади поршня, расположенного ближе к гидравлическому приводному устройству 311) можно сделать давление в полости 308 выше, чем давление в гидравлическом приводном устройстве 311.
Трубка 313 соединена непосредственно с полостью 308 линзы 301 и с гидравлическим инвертором 315. Это приводит к тому, что давление в трубке 309 и, следовательно, в полости 307 линзы 300 обратно пропорционально давлению в камере 312 гидравлического приводного устройства 311. Таким образом, по мере увеличения давления в камере 312 происходит уменьшение давления в полости 307. Таким образом, гидравлические давления в полостях 307 и 308 изменяются в противоположных направлениях по отношению друг к другу по мере перемещения поршня 314 в гидравлическом приводном устройстве 311. Гидравлический инвертор 315 содержит два приводных устройства 316 и 317, соединенных вместе посредством своих поршней 318 и 319 с использованием соединительного элемента 320.
По мере увеличения давления текучей среды в камере 312 происходит толкание поршня 319 в направлении стрелки A. Вследствие соединения посредством соединительного элемента 320 поршень 318 также вынужден совершать перемещение в том же направлении, что уменьшает давление текучей среды в полости 307 и обеспечивает возможность расслабления мембраны 305. В то же время давление текучей среды в трубке 310 и полости 308 увеличивается вследствие увеличения давления текучей среды в камере 312, а мембрана 306 продолжает вздуваться.
И наоборот, по мере уменьшения давления текучей среды в камере 312 происходит перемещение поршня 319 в направлении, противоположном стрелке A. Вследствие соединения посредством соединительного элемента 320 поршень 318 также вынужден перемещаться в том же направлении, что обеспечивает увеличение давления текучей среды в полости 307 и вынуждает мембрану 305 вздуваться. В то же время давление текучей среды в трубке 310 и полости 308 уменьшается вследствие уменьшения давления текучей среды в камере 312, а мембрана 306 расслабляется.
Степень изменения давлений текучей среды в полостях 307 и 308 может быть одинаковой для заданного изменения давления текучей среды в гидравлическом приводном устройстве 311. Однако более вероятно, что система будет выполнена с возможностью обеспечения различных степеней изменения давления текучей среды в полостях 307 и 308 при заданном изменении давления текучей среды в гидравлическом приводном устройстве 311. Это, как правило, будет являться востребованным, поскольку маловероятно, что будет необходимо изменять оптические силы линз 300 и 301 с той же самой скоростью.
Объектив с переменным фокусным расстоянием, показанный на фиг. 10, обеспечивает очень наглядный способ регулирования общего фокусного расстояния и сохранения фокуса путем одновременного изменения фокусных расстояний двух жидкостных линз, находящихся на одной оптической оси. Гидравлическая трубка и приводные устройства могут быть выполнены очень компактно по сравнению с обычными сложными приводными системами с кулачковым приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КЛАПАННОЕ УСТРОЙСТВО ДЛЯ ЛИНЗЫ С ПЕРЕМЕННЫМ ФОКУСНЫМ РАССТОЯНИЕМ | 2009 |
|
RU2489739C2 |
| ЛИНЗА С ПЕРЕМЕННЫМ ФОКУСНЫМ РАССТОЯНИЕМ И ОЧКИ | 2007 |
|
RU2407046C2 |
| УСОВЕРШЕНСТВОВАННЫЙ МЕМБРАННЫЙ УЗЕЛ С ДЕФОРМИРУЕМОЙ НЕКРУГЛОЙ МЕМБРАНОЙ (ВАРИАНТЫ) | 2012 |
|
RU2637383C2 |
| БЛОК ЛИНЗЫ, ЗАПОЛНЕННОЙ ЖИДКОСТЬЮ, С ИЗМЕНЯЕМЫМ ФОКУСНЫМ РАССТОЯНИЕМ | 2010 |
|
RU2545313C2 |
| МЕХАНИЗМ ЛИНЗЫ, ЗАПОЛНЕННОЙ ЖИДКОСТЬЮ, С ИЗМЕНЯЕМЫМ ФОКУСНЫМ РАССТОЯНИЕМ | 2010 |
|
RU2547167C2 |
| Жидкие линзы, заготовки линз и способы их изготовления | 2013 |
|
RU2635404C2 |
| ПЕРЕСТРАИВАЕМАЯ В РЕЗУЛЬТАТЕ НАГРЕВА ИНТРАОКУЛЯРНАЯ ЛИНЗА | 2017 |
|
RU2722420C1 |
| УСОВЕРШЕНСТВОВАННЫЙ МЕМБРАННЫЙ УЗЕЛ С ДЕФОРМИРУЕМОЙ МЕМБРАНОЙ (ВАРИАНТЫ) | 2013 |
|
RU2619394C2 |
| УСОВЕРШЕНСТВОВАННЫЙ МЕМБРАННЫЙ УЗЕЛ С ДЕФОРМИРУЕМОЙ МЕМБРАНОЙ | 2012 |
|
RU2689279C2 |
| ЗАПОЛНЕННЫЙ ТЕКУЧЕЙ СРЕДОЙ РЕГУЛИРУЕМЫЙ ЛИНЗОВЫЙ БЛОК И СПОСОБ ЕГО СБОРКИ | 2016 |
|
RU2721305C2 |
Изобретение относится к оптике, в частности к вариофокальным оптическим системам. Приводной механизм для одновременного привода линз с переменным фокусным расстоянием, каждая из которых содержит выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от кривизны мембраны по мере ее вздутия. При этом приводной механизм содержит гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с гидравлическим ведомым приводным устройством, связанным с первой линзой, и с гидравлическим ведомым приводным устройством, связанным со второй линзой, причем каждое ведомое приводное устройство выполнено с возможностью приложения усилия к связанной с ним линзе для изменения степени вздутия мембраны связанной с ним линзы в ответ на срабатывание ведущего приводного устройства, при этом ведомые приводные устройства гидравлически соединены с ведущим приводным устройством для приведения в действие ведомых приводных устройств путём передачи приводного усилия от ведущего приводного устройства к ведомым приводным устройствам, а ведущее приводное устройство выполнено с возможностью срабатывания с тем, чтобы вызывать одновременное изменение степени вздутия мембран первой и второй линз. Причем каждое гидравлическое ведомое приводное устройство выполнено с возможностью изменения степени вздутия мембраны связанной с ним линзы в ответ на срабатывание ведущего приводного устройства путем приложения усилия к управляющему кольцу для управления изгибом, скрепленному с периферией мембраны. 4 н. и 18 з.п. ф-лы, 10 ил.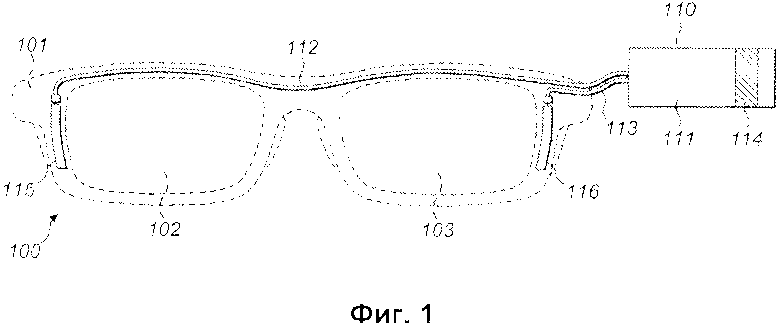
1. Приводной механизм для одновременного привода первой и второй линз с переменным фокусным расстоянием, каждая из которых содержит выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от кривизны мембраны по мере ее вздутия, а приводной механизм содержит:
гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с гидравлическим ведомым приводным устройством, связанным с первой линзой, и с гидравлическим ведомым приводным устройством, связанным со второй линзой, причем каждое ведомое приводное устройство выполнено с возможностью приложения усилия к связанной с ним линзе для изменения степени вздутия мембраны связанной с ним линзы в ответ на срабатывание ведущего приводного устройства, при этом ведомые приводные устройства гидравлически соединены с ведущим приводным устройством для приведения в действие ведомых приводных устройств путём передачи приводного усилия от ведущего приводного устройства к ведомым приводным устройствам, а ведущее приводное устройство выполнено с возможностью срабатывания с тем, чтобы вызывать одновременное изменение степени вздутия мембран первой и второй линз, при этом
каждое гидравлическое ведомое приводное устройство выполнено с возможностью изменения степени вздутия мембраны связанной с ним линзы в ответ на срабатывание ведущего приводного устройства путем приложения усилия к управляющему кольцу для управления изгибом, скрепленному с периферией мембраны.
2. Приводной механизм по п. 1, в котором каждое ведомое приводное устройство выполнено с возможностью приложения соответствующего необходимого усилия при заданном давлении текучей среды.
3. Приводной механизм по п. 1, в котором гидравлическое ведущее приводное устройство соединено с ведомыми приводными устройствами посредством прозрачной трубки, показатель преломления которой совпадает с показателем преломления текучей среды, заполняющей полости первой и второй линз.
4. Приводной механизм по п. 1, в котором каждое гидравлическое ведомое приводное устройство расположено за пределами заполненной текучей средой полости связанной с ним линзы.
5. Приводной механизм по п. 1, в котором первая и вторая линзы образовывают часть множества из трех или более линз с переменным фокусным расстоянием, каждая из которых содержит выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от степени кривизны мембраны по мере ее вздутия, а приводной механизм содержит:
гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с множеством гидравлических ведомых приводных устройств, каждое из которых связано с соответствующей линзой и выполнено с возможностью изменения степени вздутия мембраны своей соответствующей линзы в ответ на срабатывание ведущего приводного устройства, причем ведущее приводное устройство выполнено с возможностью срабатывания с тем, чтобы вызывать одновременное изменение степени вздутия мембран всех линз.
6. Приводной механизм для первой линзы с переменным фокусным расстоянием, содержащий выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от кривизны мембраны по мере ее вздутия, а приводной механизм содержит:
гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с первым множеством гидравлических ведомых приводных устройств, которые выполнены с возможностью совместного изменения степени вздутия мембраны первой линзы в ответ на срабатывание ведущего приводного устройства, при этом ведомые приводные устройства гидравлически соединены с ведущим приводным устройством для приведения в действие ведомых приводных устройств путём передачи приводного усилия от ведущего приводного устройства к ведомым приводным устройствам.
7. Приводной механизм по п. 6, в котором каждое гидравлическое ведомое приводное устройство из указанного первого множества гидравлических ведомых приводных устройств расположено в соответствующем месте управления вокруг периферии первой линзы.
8. Приводной механизм по п. 7, в котором каждое ведомое приводное устройство из указанного первого множества ведомых приводных устройств выполнено с возможностью приложения соответствующего необходимого усилия при заданном давлении текучей среды.
9. Приводной механизм по п. 6, в которой гидравлическое ведущее приводное устройство соединено с ведомыми приводными устройствами из указанного первого множества ведомых приводных устройств посредством прозрачной трубки, показатель преломления которой совпадает с показателем преломления текучей среды, заполняющей полость первой линзы.
10. Приводной механизм по п. 6, в котором указанное первое множество ведомых приводных устройств выполнено с возможностью совместного изменения степени вздутия мембраны первой линзы в ответ на срабатывание ведущего приводного устройства путем приложения усилия каждым из этих ведомых приводных устройств к управляющему кольцу для управления изгибом, скрепленному с периферией мембраны первой линзы.
11. Приводной механизм по п. 6, в котором каждое гидравлическое ведомое приводное устройство из указанного первого множества гидравлических ведомых приводных устройств расположено за пределами заполненной текучей средой полости первой линзы.
12. Приводной механизм по п. 6, дополнительно содержащий вторую линзу с переменным фокусным расстоянием, содержащую выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от кривизны мембраны по мере ее вздутия, а гидравлическое ведущее приводное устройство сообщается посредством текучей среды со вторым множеством гидравлических ведомых приводных устройств, которые выполнены с возможностью совместного изменения степени вздутия мембраны второй линзы в ответ на срабатывание ведущего приводного устройства.
13. Приводной механизм по п. 12, в котором каждое гидравлическое ведомое приводное устройство из указанного второго множества гидравлических ведомых приводных устройств размещено в соответствующем месте управления вокруг периферии второй линзы.
14. Приводной механизм по п. 13, в котором каждое ведомое приводное устройство из указанного второго множества ведомых приводных устройств выполнено с возможностью приложения соответствующего необходимого усилия при заданном давлении текучей среды.
15. Приводной механизм по п. 12, в которой гидравлическое ведущее приводное устройство соединено с ведомыми приводными устройствами из указанного второго множества ведомых приводных устройств посредством прозрачной трубки, показатель преломления которой совпадает с показателем преломления текучей среды, заполняющей полость второй линзы.
16. Приводной механизм по п. 12, в котором указанное второе множество гидравлических ведомых приводных устройств выполнено с возможностью совместного изменения степени вздутия мембраны второй линзы в ответ на срабатывание ведущего приводного устройства путем приложения усилия каждым из этих гидравлических ведомых приводных устройств к управляющему кольцу для управления изгибом, скрепленному с периферией мембраны второй линзы.
17. Приводной механизм по п. 12, в котором каждое гидравлическое ведомое приводное устройство из указанного второго множества гидравлических ведомых приводных устройств расположено за пределами заполненной текучей средой полости второй линзы.
18. Приводной механизм по п. 12, в котором первая и вторая линзы образуют часть множества из трех или более линз с переменным фокусным расстоянием, каждая из которых содержит выполненную с возможностью вздутия мембрану, ограничивающую заполненную текучей средой полость, при этом фокусное расстояние изменяется в зависимости от степени кривизны мембраны по мере ее вздутия, а приводной механизм содержит:
гидравлическое ведущее приводное устройство, сообщающееся посредством текучей среды с множеством гидравлических ведомых приводных устройств, каждое из которых связано с соответствующей линзой и выполнено с возможностью изменения степени вздутия мембраны связанной с ним линзы в ответ на срабатывание ведущего приводного устройства, причем ведущее приводное устройство выполнено с возможностью срабатывания с тем, чтобы вызывать одновременное изменение степени вздутия мембран всех линз.
19. Очки, содержащие оправу и приводной механизм по любому из пп. 1–5 или 12–17, причем первая и вторая линзы размещены в оправе с образованием левой и правой линз указанных очков.
20. Очки по п. 19, в которых степень вздутия мембраны первой линзы отличается от степени вздутия мембраны второй линзы при заданном срабатывании ведущего приводного устройства.
21. Объектив с переменным фокусным расстоянием, содержащий множество групп оптических элементов, содержащих фокусную группу и вариаторную группу, расположенные на одной оптической оси, и содержащий приводной механизм по любому из пп. 1–5 или 12–17, при этом первая и вторая линзы образуют соответственно часть фокусной и вариаторной групп.
22. Объектив с переменным фокусным расстоянием по п. 21, дополнительно содержащий гидравлическое инвертирующее устройство с тем, чтобы вызывать противоположные изменения фокусных расстояний первой и второй линз.
| US 7986465 B1, 26.07.2011 | |||
| US 3598479 A, 10.08.1971 | |||
| US 7359124 B1, 15.04.2008 | |||
| US 6318857 B1, 20.11.2001. |

