ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ[0001] Эта заявка относится, в общем, к области систем управления ускорением транспортного средства и, в частности, к системам получения приоритета педали акселератора.
УРОВЕНЬ ТЕХНИКИ
[0002] Автомобили могут быть обеспечены вспомогательными функциями, подобными круиз-контролю, известными как функции регулируемого водителем ограничения скорости транспортного средства (VSL). Эти функции известны под их маркетинговыми названиями как «Регулируемый ограничитель скорости» (ASL или ASLD) и «Интеллектуальный ограничитель скорости» (ISL). Цель этих функций состоит в том, чтобы позволять водителю устанавливать желаемое ограничение скорости транспортного средства, когда он осуществляет вождение. ASL и ISL подобны круиз-контролю с основным отличием в том, что водитель устанавливает ограничение скорости транспортного средства, а не установленную скорость. Водитель может затем осуществлять вождение в обычном порядке с уверенностью в том, что транспортное средство не будет непреднамеренно превышать желаемое ограничение скорости. Это особенно полезно в областях, где строго соблюдаются ограничения скорости на дороге.
[0003] Обычно, как только скорость транспортного средства достигает ограничения скорости, ASL игнорирует дальнейшие увеличения положения педали акселератора водителем для поддержания установленного ограничения скорости. Водитель может, тем не менее, ожидать, что, если он нажмет на педаль акселератора достаточно сильно, он будет способен получать приоритет и превышать желаемое ограничение скорости. Такие механизмы получения приоритета представляют некоторые проблемы, включающие в себя нежелательное колебание ускорения транспортного средства после включения механизма получения приоритета, нежелательное ощущение отказавшей педали во время получения приоритета педали и нежелательные эксплуатационные характеристики транспортного средства во время перехода обратно к установленному ограничению скорости транспортного средства.
[0004] В связи с этим существует необходимость в системе получения приоритета педали акселератора, которая решает эти проблемы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Система для получения приоритета перед установкой ограничения скорости транспортного средства с помощью получения приоритета педали акселератора, содержащая: транспортное средство, включающее в себя рулевое управление, педаль акселератора, тормоза, процессор и память; модуль получения приоритета перед скоростью ограничения транспортного средства, соединенный с процессором и выполненный с возможностью получения приоритета перед установкой ограничения скорости посредством вычисления порогового значения получения приоритета на основе установленного ограничения скорости и учета переменного веса транспортного средства, уклона дороги или других неизвестных нагрузок. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью приема данных о положении педали. Причем в упомянутой системе данные о положении педали включают в себя данные о положении получения приоритета педали, связанные с инициацией получения приоритета педали на основе установленного ограничения скорости и условий нагрузки транспортного средства.
[0006] Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью обеспечения обратной связи водителю для указания на то, что произошло получение приоритета педали. Причем в упомянутой системе обратная связь включает в себя желаемое отклонение ускорения транспортного средства от текущего ускорения транспортного средства, чтобы позволять водителю ощущать, когда запускается получение приоритета педали. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью выхода из получения приоритета педали, когда запрос на ускорение при получении приоритета педали, связанный с увеличивающимся положением педали, становится больше, чем запрос на ускорение потребности водителя. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью выхода из получения приоритета педали, когда запрос на ускорение при получении приоритета педали, связанный с уменьшающимся положением педали, становится меньше, чем точка запуска получения приоритета педали, и больше, чем запрос на ускорение потребности водителя.
[0007] Система для получения приоритета перед установкой ограничения скорости транспортного средства с помощью получения приоритета педали акселератора, содержащая: транспортное средство, включающее в себя рулевое управление, педаль акселератора, тормоза, процессор и память; модуль получения приоритета перед ограничением скорости транспортного средства, соединенный с процессором и выполненный с возможностью перемасштабирования положения получения приоритета педали до 50% полного доступного перемасштабированного хода педали после инициации получения приоритета педали перед установкой ограничения скорости для компенсации диапазона хода педали акселератора. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью приема данных о положении педали от датчика положения педали. Причем в упомянутой системе данные о положении педали включают в себя данные о положении получения приоритета педали, связанные с инициацией получения приоритета педали на основе установленного ограничения скорости и условий нагрузки транспортного средства. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью обеспечения обратной связи водителю для указания на то, что произошло получение приоритета педали.
[0008] Причем в упомянутой системе обратная связь включает в себя желаемое отклонение ускорения транспортного средства от текущего ускорения транспортного средства, которое обеспечивает относительно плавный переход от ограничения скорости к ускорению транспортного средства за счет инициации получения приоритета педали. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью выхода из получения приоритета педали, когда запрос на ускорение при получении приоритета педали, связанный с увеличивающимся положением педали, становится больше, чем запрос на ускорение потребности водителя. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью выхода из получения приоритета педали, когда запрос на ускорение при получении приоритета педали, связанный с уменьшающимся положением педали, становится меньше, чем точка запуска получения приоритета педали, и больше, чем запрос на ускорение потребности водителя.
[0009] Система для получения приоритета перед установкой ограничения скорости транспортного средства с помощью получения приоритета педали акселератора, содержащая: транспортное средство, включающее в себя рулевое управление, педаль акселератора, тормоза, процессор и память; модуль получения приоритета перед ограничением скорости транспортного средства, соединенный с процессором и выполненный с возможностью перемасштабирования положения получения приоритета педали до 50% полного доступного перемасштабированного хода педали после инициации получения приоритета педали перед установкой ограничения скорости для компенсации диапазона хода педали акселератора, причем ускорение транспортного средства плавно переходит от ограничения скорости к ускорению транспортного средства после инициации получения приоритета педали. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью приема данных о положении педали от датчика положения педали. Причем в упомянутой системе данные о положении педали включают в себя данные о положении получения приоритета педали, связанные с инициацией получения приоритета педали на основе установленного ограничения скорости и условий нагрузки транспортного средства.
[0010] Причем в упомянутой системе при отпускании педали при получении приоритета модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью вызывать возвращение увеличения ускорения транспортного средства при последующем нажатии педали. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью выхода из получения приоритета педали, когда запрос на ускорение при получении приоритета педали, связанный с увеличивающимся положением педали, становится больше, чем запрос на ускорение потребности водителя. Причем в упомянутой системе модуль получения приоритета перед ограничением скорости транспортного средства выполнен с возможностью выхода из получения приоритета педали, когда запрос на ускорение при получении приоритета педали, связанный с уменьшающимся положением педали, становится меньше, чем точка запуска получения приоритета педали, и больше, чем запрос на ускорение потребности водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
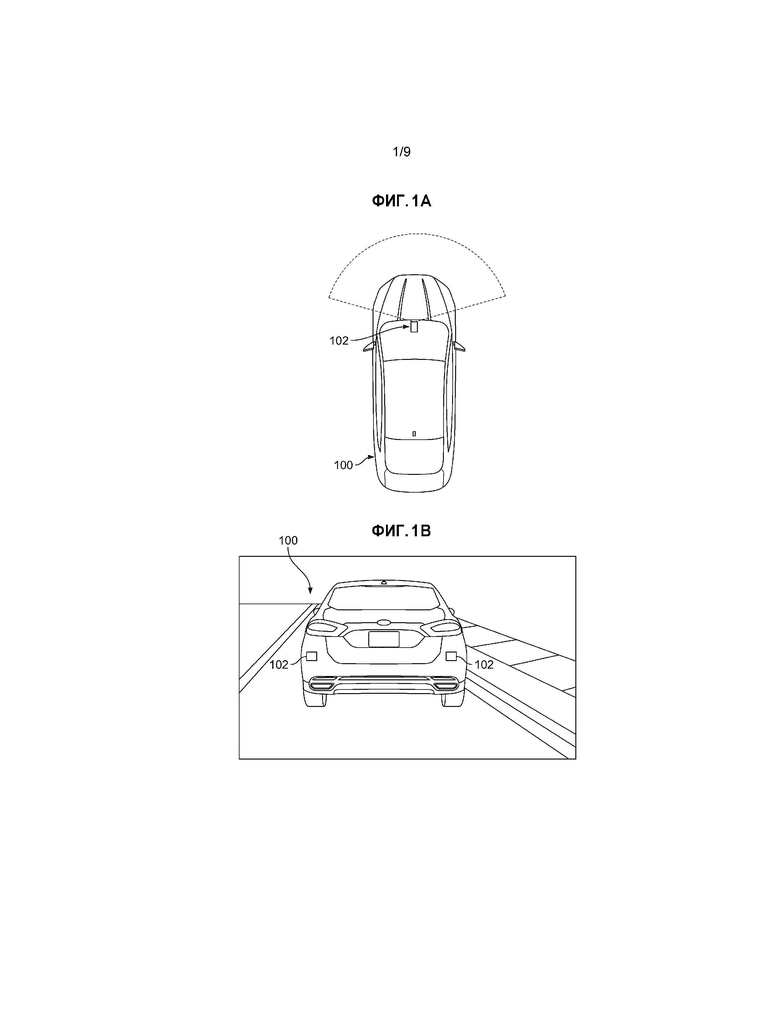
[0011] Фиг. 1А иллюстрирует вид сверху транспортного средства текущего раскрытия.
[0012] Фиг. 1B иллюстрирует вид сзади транспортного средства, показанного на Фиг. 1А.
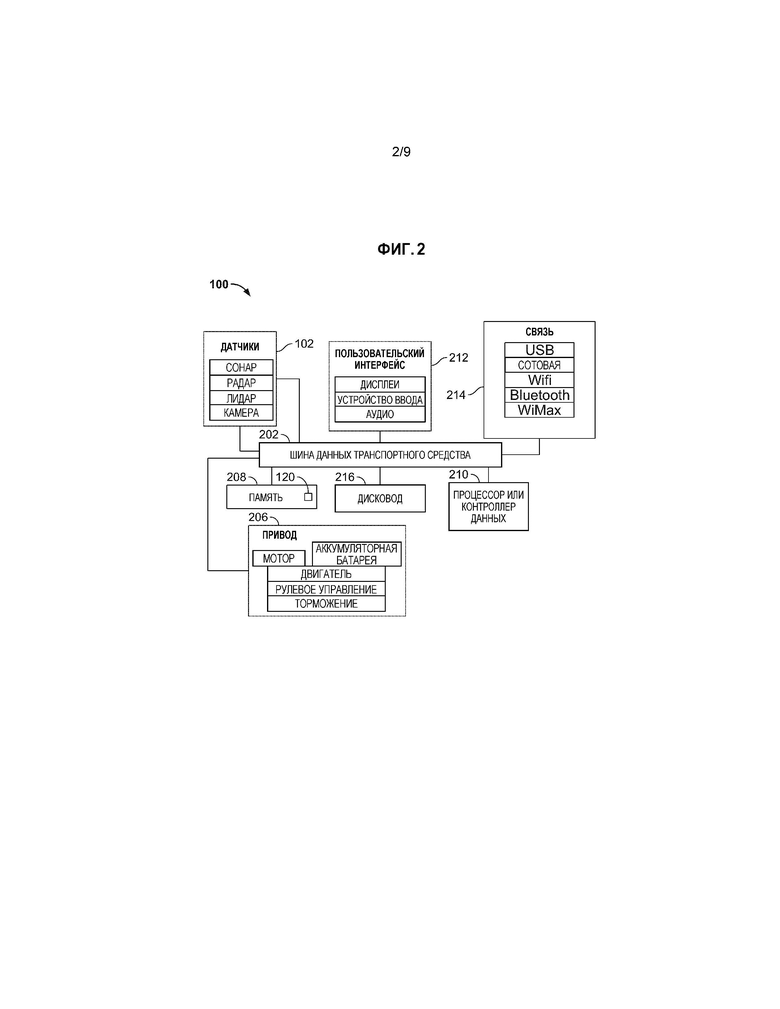
[0013] Фиг. 2 иллюстрирует блок-схему примерных компонентов транспортного средства, показанного на Фиг. 1А.
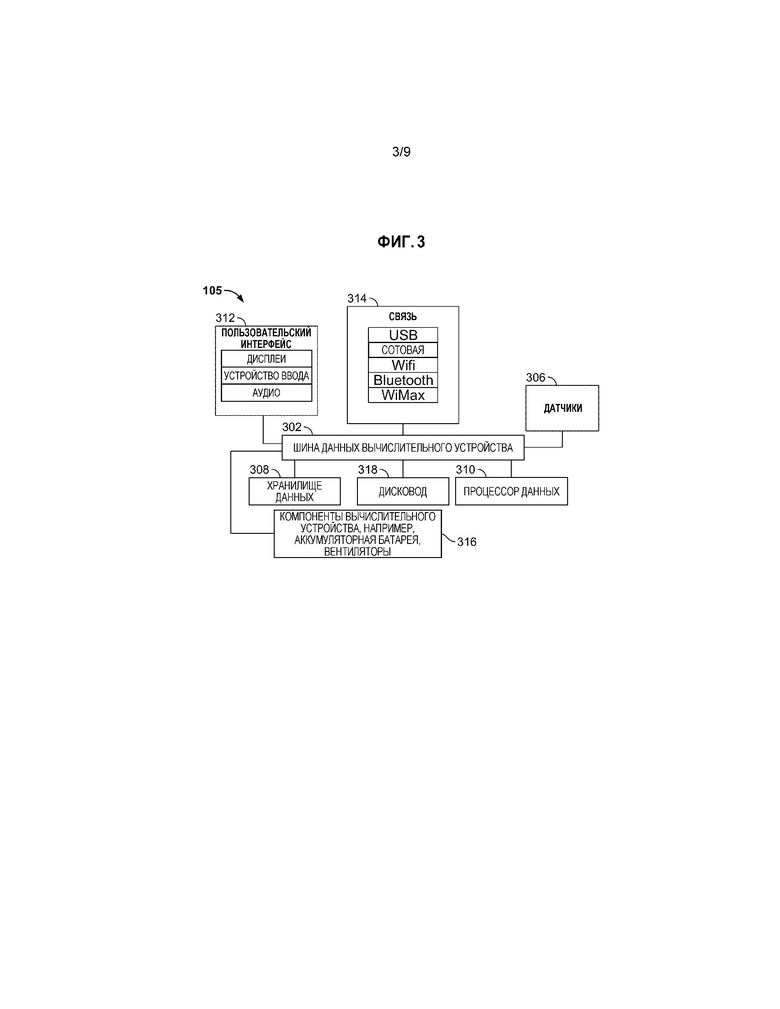
[0014] Фиг. 3 иллюстрирует блок-схему примерного вычислительного устройства, функционально соединенного с транспортным средством, показанным на Фиг. 1А.
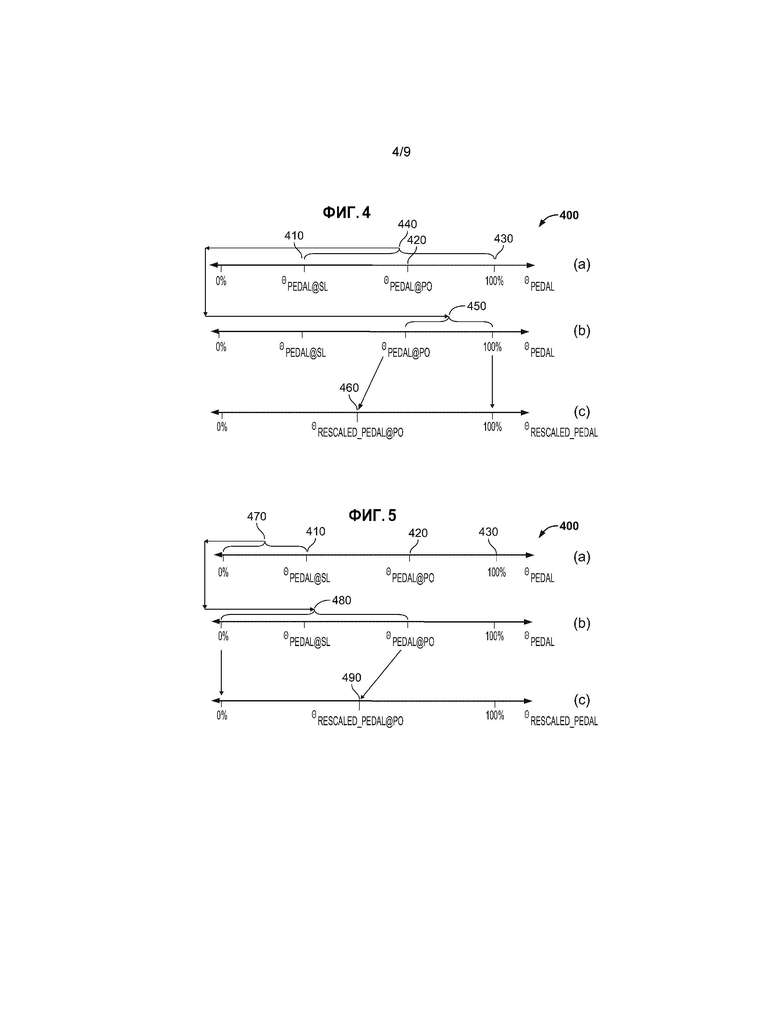
[0015] Фиг. 4 иллюстрирует примерный результат перемасштабированного положения получения приоритета педали текущего раскрытия.
[0016] Фиг. 5 иллюстрирует примерный результат перемасштабированного положения получения приоритета педали текущего раскрытия.
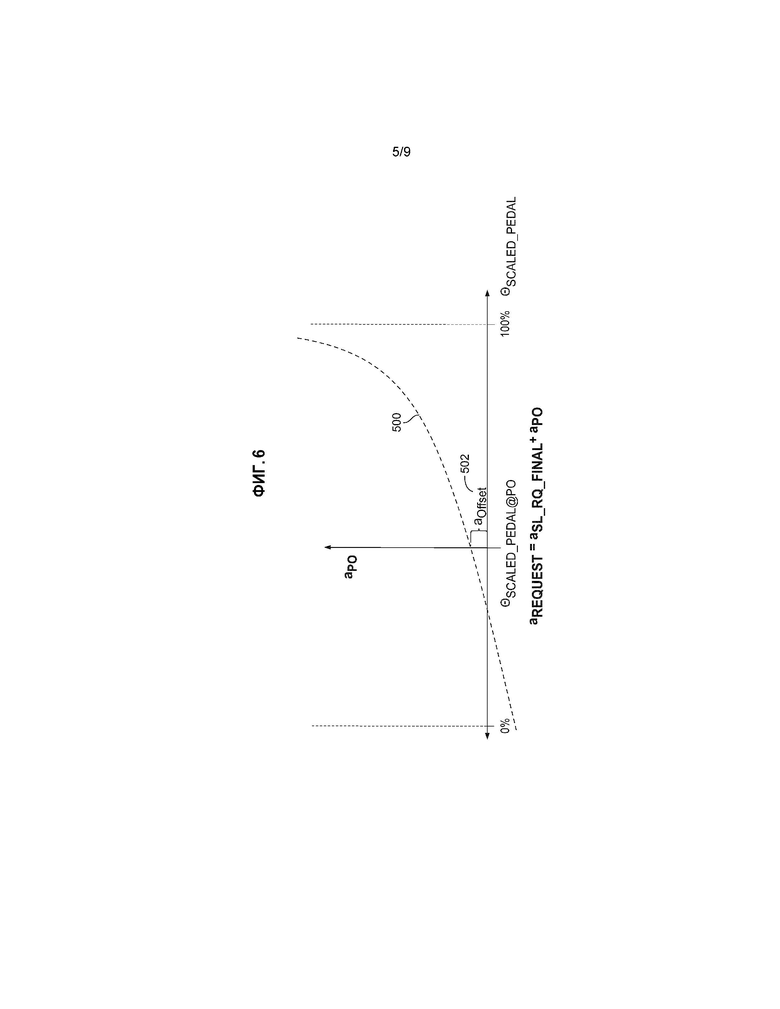
[0017] Фиг. 6 иллюстрирует примерный график запроса на ускорение при получении приоритета педали как функции от масштабированного положения педали.
[0018] Фиг. 7 иллюстрирует примерный график запроса на ускорение как функции от положения педали, показывающий переход от ограничения скорости к получению приоритета педали.
[0019] Фиг. 8 иллюстрирует примерный график запроса на ускорение как функции от масштабированного положения педали, показывающий переход от ограничения скорости к получению приоритета педали.
[0020] Фиг. 9 иллюстрирует примерный график запроса на ускорение как функции от положения педали, показывающий выход из получения приоритета педали, когда положение педали увеличивается по направлению к максимальному положению педали.
[0021] Фиг. 10 иллюстрирует примерный график запроса на ускорение как функции от положения педали, показывающий выход из получения приоритета педали, когда положение педали уменьшается по направлению к закрытому положению педали.
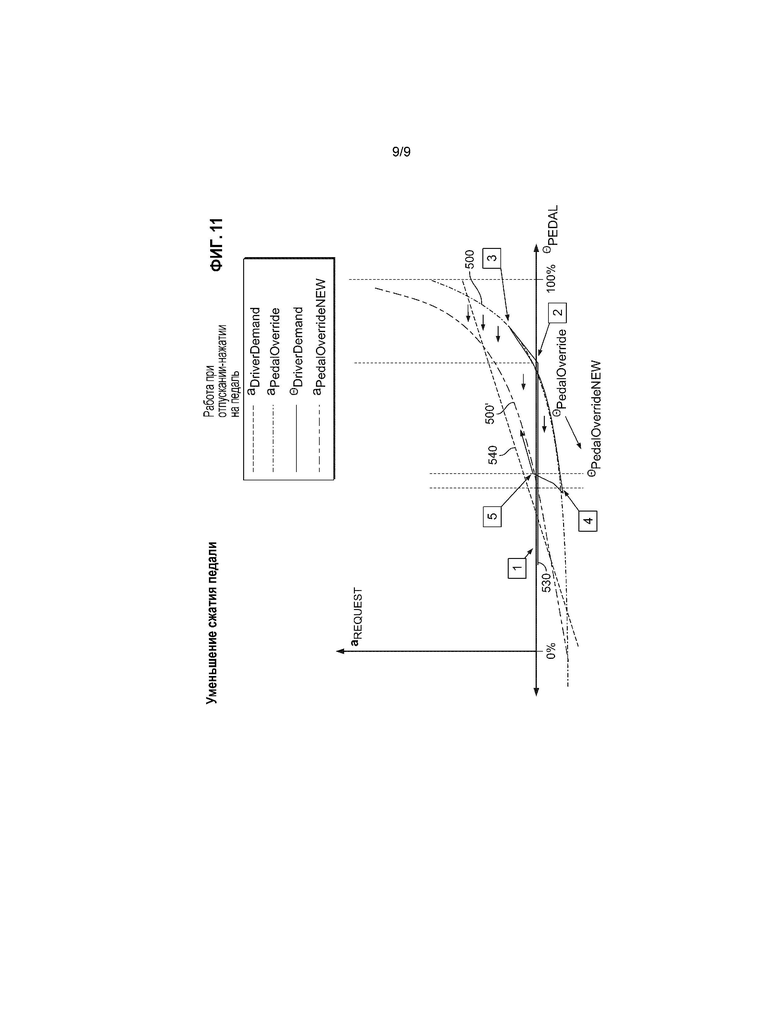
[0022] Фиг. 11 иллюстрирует примерный график запроса на ускорение как функции от положения педали, показывающий уменьшение сжатия хода педали во время повторного входа и выхода из получения приоритета педали.
ПОДРОБНОЕ ОПИСАНИЕ [0023] Несмотря на то что фигуры и текущее раскрытие описывают один или более вариантов выполнения системы получения приоритета педали акселератора для использования в связи с системами ограничения скорости транспортного средства, специалист в области техники будет принимать во внимание, что принципы текущего раскрытия не будут ограничены этими вариантами выполнения.
[0024] В целях этого раскрытия:
[0025] ΘPEDAL - текущее, немасштабированное положение педали.
[0026] ΘSCALED_PEDAL - положение педали акселератора, масштабированное так, что точка запуска получения приоритета педали соответствует, например, 50% в перемасштабированной педали.
[0027] ΘPEDAL@SL - положение педали акселератора при желаемом ограничении скорости транспортного средства.
[0028] ΘSCALED_PEDAL@PO - перемасштабированное положение педали, которое устанавливает соответствие точки запуска получения приоритета педали с 50% в масштабированном положении педали.
[0029] ΘPedalOverride - положение педали при получении приоритета педали.
[0030] ΘPedalOverrideNEW - новая точка запуска получения приоритета педали, обусловленная уменьшением сжатия педали.
[0031] aOffset - желаемое отклонение ускорения для «инстинктивного» ощущения, когда запускается получение приоритета педали.
[0032] aPO - запрос на ускорение при получении приоритета педали, вытекающий из ограничения ускорения при получении приоритета педали как функции от положения педали.
[0033] aPedalOverride - запрос на ускорение при получении приоритета педали, вытекающий из ограничения ускорения при получении приоритета педали как функции от положения педали.
[0034] ΘRESCALED_PEDAL - перемасштабированное положение педали, используемое в качестве входных данных для функции запроса на ускорение при получении приоритета педали.
[0035] aDriverDemand - запрос на ускорение от работы при нормальной потребности водителя.
[0036] aREQUEST - окончательный запрос на ускорение, определенный между запросами на ускорение при ограничении скорости, получении приоритета педали и нормальной потребности водителя.
[0037] aSpeedLimiter - запрос на ускорение, вытекающий из работы при ограничении скорости.
[0038] Tip-out - уменьшение водителем положения педали.
[0039] Tip-in - увеличение водителем положения педали.
[0040] VLIMIT - желаемое ограничение скорости, также называемое VSL.
[0041] VSL - желаемое ограничение скорости, также называемое VLIMIT.
[0042] FAD@SL - сила, обусловленная аэродинамическим сопротивлением при ограничении скорости.
[0043] FRR@SL - сила, обусловленная сопротивлением прокатыванию при ограничении скорости.
[0044] Fwheel@SL - сила тяги на колесе транспортного средства при ограничении скорости.
[0045] FNET - чистая сила на транспортном средстве.
[0046] FUNKNOWN - неизвестные силы, в основном обусловленные дополнительной массой транспортного средства и уклоном дороги.
[0047] TENG@SL - крутящий момент двигателя при желаемом ограничении скорости.
[0048] μFD - конечное передаточное отношение (т.е. передаточное отношение дифференциала).
[0049] μTRANS - передаточное отношение трансмиссии.
[0050] μCONV - передаточное отношение преобразователя крутящего момента.
[0051] rwheel - радиус колеса.
[0052] TLosses - потери крутящего момента в силовом агрегате.
[0053] nENG@SL - скорость двигателя при желаемом ограничении скорости.
[0054] ΘSL_NOMINAL - положение педали при желаемом ограничении скорости при номинальных условиях транспортного средства.
[0055] ΘRG_COMP - компенсация с помощью педали неизвестной силы FUNKNOWN.
[0056] ΘPEDAL@PO - положение педали при получении приоритета педали.
[0057] ΘMRGN - расстояние выше ΘPEDAL@SL, используемое для определения точки запуска получения приоритета педали.
[0058] aSL_RQ_FINAL - запрос на ускорение ограничителя скорости в точке, где запускается получение приоритета педали.
[0059] VERROR@PO - ошибка скорости транспортного средства для ограничения скорости в точке, где запускается получение приоритета педали.
[0060] aPO_INIT - первоначальный запрос на ускорение для запроса на ускорение при получении приоритета педали в точке, где запускается получение приоритета педали.
[0061] Driver demand (потребность водителя) - запрос на ускорение или крутящий момент от водителя, нажимающего на педаль акселератора.
[0062] Основная выполняемая функция «Регулируемого ограничителя скорости» (ASL или ASLD) и «Интеллектуального ограничителя скорости» (ISL)транспортного средства заключается в предотвращении превышения скоростью транспортного средства выбранного водителем желаемого ограничения скорости (называемого здесь VSL или VLIMIT). Но водитель также ожидает, что, если он нажмет на педаль акселератора достаточно сильно, он сможет снова ускорить транспортное средство и превысить VLIMIT. Для некоторого положения педали (и заданного набора условий транспортного средства) скорость транспортного средства будет находиться на VLIMIT и дальнейший ход педали не приводит к увеличенной скорости транспортного средства. В целях настоящего изобретения это положение педали будет определено как ΘPEDAL@SL.
[0063] ΘPEDAL@SL обозначает начало активного ограничения скорости транспортного средства. Это является основой для точки запуска получения приоритета педали. Когда положение педали продолжает увеличиваться за пределы ΘPEDAL@SL, то же самое происходит и с запросом на ускорение нормальной потребности водителя. Запрос на ускорение потребности водителя отклоняется от запроса на ускорение ограничителя скорости (который равен нулю при VLIMIT).
[0064] Ход педали за пределы ΘPEDAL@SL будет приводить к тому, что может быть названо сжатием педали. Когда водитель продолжает нажимать на педаль дальше, в некоторой точке может происходить получение приоритета педали перед VLIMIT. Для заданного VLIMIT получение приоритета педали может происходить на некотором расстоянии выше ΘPEDAL@SL, которое может быть интуитивным для водителя.
[0065] Для запуска получения приоритета педали водителем обратное вычисление положения педали на основе текущего VLIMIT является желательным для поддержания текущего VLIMIT при текущих условиях, ΘPEDAL@SL. Будет существовать расстояние выше ΘPEDAL@SL до возникновения получения приоритета педали для того, чтобы выполнять основную функцию, ограничение скорости. В целях настоящего изобретения это расстояние определена как ΘMRGN. В некоторых вариантах выполнения значение ΘMRGN может быть определено с помощью статистической выборки достаточно большого числа водителей в исследовании.
[0066] Для определения ΘPEDAL@SL может быть возможно вычисление функции, обратной функции потребности водителя:
FNET=Fwheel@SL+FAD@SL+ FRR@SL+FUNKNOWN
TENG@SL=μFD × μTRANS × μCONV × Fwheel@SL × rwheel+TLosses
ΘPEDAL@SL=ƒ-1(TENG@SL, nENG@SL)
[0067] Вычисление положения педали на основе крутящего момента двигателя может использовать обратную функцию поиска. Альтернативно, ΘPEDAL@SL может быть определено приблизительно. Например, один подход может включать в себя начало с функцией, которая возвращает номинальное положение педали, ΘSL_NOMINAL, для стандартных условий температуры и давления на ровной дороге с номинальным весом транспортного средства и номинальным сопротивление качению на основе VLIMIT.
ΘSL_NOMINAL=ƒNOMINAL(VLIMIT)
[0068] Предполагается, что обратная функция является линейной, и компонент FUNKNOWN соответствует соответствующему изменению положения педали, которое аддитивно вводится в окончательное вычисление положения педали. Приближенное представление этой функции представляет собой:
[0069] ΘRG_COMP=ƒ(FUNKNOWN)
[0070] Затем ΘSL_NOMINAL может быть компенсировано по FUNKNOWN следующим образом:
ΘPEDAL@SL=ΘSL_NOMINAL+ΘRG_COMP
[0071] В целях настоящего изобретения положение педали, где происходит получение приоритета педали, может быть определено как ΘPEDAL@PO согласно следующему уравнению:
ΘPEDAL@PO=ΘPEDAL@SL+ΘMRGN (обеспечивает согласованное положение получения приоритета педали)
[0072] Теперь, когда нам известно, когда может быть запущено получение приоритета педали, следующий вопрос состоит в том, что делать во время получения приоритета педали. В одном варианте выполнения может быть желательно возвращаться к нормальному поведению педали, когда водитель переходит к получению приоритета педали. Если запрос на ускорение потребности водителя ниже запроса на ускорение под управлением VSL, VSL не находится в управлении, так как нормальная потребность водителя находится в управлении. В этой ситуации получение приоритета педали не требуется.
[0073] Но возможно, что запрос на ускорение потребности водителя превышает запрос на ускорение под управлением VSL. При этом событии может быть желательным процесс для перехода обратно к нормальной потребности водителя и оптимально с помощью плавного перехода от VSL к потребности водителя, предпочтительно, при отсутствии прерываний запроса на крутящий момент двигателя, которые будут вызывать стук силового агрегата или внезапное колебание скорости транспортного средства. Для водителя педаль должна ощущаться нормальной или почти нормальной до тех пор, пока не сможет быть восстановлена нормальная потребность водителя, и, предпочтительно, без какого-либо большого или прерывистого увеличения запроса на крутящий момент во время работы при получении приоритета педали и без ощущения отказавшей педали для водителя во время работы при получении приоритета педали. В дополнение, транспортное средство должно предпочтительно регистрировать постоянный запрос на ускорение для постоянного положения педали, и увеличивающаяся педаль за пределы ΘPEDAL@PO должна, предпочтительно, приводить к запросу на увеличивающееся ускорение. Подобным образом, уменьшающаяся педаль ниже ΘPEDAL@PO должна, предпочтительно, приводить к запросу на уменьшающееся ускорение. При запуске получения приоритета педали должна, предпочтительно, присутствовать обратная связь для водителя о том, что было запущено получение приоритета педали, «инстинктивное» ощущение. При широко открытой педали может быть достигнута широко открытая дроссельная заслонка. При закрытой педали может быть достигнут минимальный запрос на крутящий момент. Выходные переходы с хорошим поведением обратно к потребности водителя могут быть предпочтительными.
[0074] Мы управляем запросом на ускорение для поддержания VSL. Во время получения приоритета педали запрос на ускорение VSL может возвращаться к запросу на ускорение потребности водителя. Возвращение всего ускорения потребности водителя при входе в получение приоритета педали может приводить к колебаниям транспортного средства, когда ускорение переходит от (номинально) 0 к относительно большой величине, определенной текущим положением педали, что может не являться оптимальным для водителя.
[0075] Другая возможность заключается в том, чтобы брать потребность водителя в точке, где произошел вход в ограничение скорости, - ΘPEDAL@SL - и добавлять ход педали выше ΘPEDAL@PO к ней. Но это может приводить к уменьшенному запросу на ускорение, который может не достигать максимального ускорения при 100% педали, что может не являться оптимальным для водителя.
[0076] Другое соображение при попытке использования модифицированной версии нормальной потребности водителя заключается в том, что она представляет собой запрос на крутящий момент двигателя. Ощущение от эксплуатации может быть изменчивым от одного события получения приоритета педали до следующего, так как запрос на ускорение потребности водителя зависит от текущих дорожных условий. Следовательно, настоящее раскрытие раскрывает процесс, который обеспечивает псевдонормальное поведение педали и переходы от управления VSL обратно к потребности водителя для обеспечения согласованного ощущения педали для водителя.
[0077] Во время работы при ограничении скорости запрос на ускорение может быть определен на основе ошибки скорости транспортного средства. Как только произошел вход в получение приоритета педали, ошибка скорости транспортного средства может быть больше не актуальной. Вместо этого может быть актуальным возвращение к работе при нормальной потребности водителя. Но не является предпочтительным внезапное переключение на нормальную потребность водителя из-за вероятности прерывания запроса на крутящий момент. Предпочтительно, переход обратно к потребности водителя должен ощущаться настолько близко к нормальной потребности водителя, насколько возможно (т.е. псевдонормально). Для непрерывной работы начальная точка для запроса на ускорение при получении приоритета педали может начинаться с последнего запроса на ускорение ограничителя скорости, который может обычно, но необязательно, быть равен 0.
[0078] При получении приоритета педали поведение системы может, предпочтительно, быть следующим:
[0079] 1. Транспортное средство при ограничении скорости обычно имеет ускорение, равное 0, и скорость транспортного средства может быть меньше или больше ограничения скорости. В связи с этим для учета запроса на ускорение ограничителя скорости при переходе к получению приоритета педали:
[0080] aSL_RQ_FINAL=ƒSL(VERROR@PO) (при получении приоритета педали VERROR может быть больше не актуальной, но запрос на ускорение при входе в получение приоритета педали может быть актуальным).
[0081] 2. Водитель может желать некоторого ускорения немедленно и без ощущения отказавшей педали. Когда получение приоритета педали достигнуто, запрос на ускорение ограничителя скорости может быть увеличен на значительную величину для обеспечения «инстинктивного» ощущения, поэтому вход в получение приоритета педали распознается:
[0082] aPO_INIT=aSL_RQ_FINAL+aOffset (это там, где запрос на ускорение может начинаться при получении приоритета педали).
[0083] 3. Водитель может желать ощущения нормальной педали. Переход обратно к нормальной потребности водителя должен, предпочтительно, быть очевидным. Функция, которая может выполнять это, выглядит следующим образом:
[0084] aPO=ƒPO(ΘPEDAL)+aPO_INIT (таким образом, ограничение ускорения может переходить от первоначального до максимального, когда педаль проходит от ΘPEDAL@PO до 100% педали, и обеспечивает замедление, когда педаль переходит ниже ΘPEDAL@PO до 0% педали).
[0085] 4. ƒPO(ΘPEDAL) может затем продолжать ограничивать запрос на ускорение во время получения приоритета педали и обеспечивать ощущение псевдонормальной педали акселератора. Но ΘPEDAL@PO может изменяться на основе желаемого ограничения скорости и может приводить к различным первоначальным запросам на ускорение при запуске получения приоритета педали. Таким образом, для согласованности реакции ускорения педаль может быть перемасштабирована для ƒPO(ΘPEDAL). В одном варианте выполнения перемасштабирование является таким, что ΘPEDAL@PO может соответствовать 50% в ƒPO(ΘPEDAL). В целях настоящего изобретения перемасштабированная педаль будет определена как ΘRESCALED_PEDAL.
[0086] Обращаясь теперь к чертежам, на которых одинаковые ссылочные позиции относятся к одинаковым элементам, показаны примерные варианты выполнения и способы обеспечения псевдонормального поведения педали во время получения приоритета педали и во время перехода из получения приоритета педали и обратно к нормальной потребности водителя.
[0087] Фиг. 1А-1B показывают транспортное средство 100 в соответствии с одним вариантом выполнения текущего раскрытия. В этом варианте выполнения транспортное средство 100 представляет собой автомобиль, хотя в других вариантах выполнения транспортное средство 100 может представлять собой любое подходящее транспортное средство (такое как грузовой автомобиль, плавучее средство или летательный аппарат). Транспортное средство 100 может представлять собой транспортное средство с бензиновым двигателем, гибридное транспортное средство, электрическое транспортное средство, транспортное средство на топливных элементах или любой другой тип подходящего транспортного средства. Транспортное средство 100 может включать в себя стандартные признаки, такие как передняя панель, регулируемые сиденья, одна или более аккумуляторных батарей, двигатель или мотор, трансмиссия, система HVAC, включающая в себя компрессор и электронный расширительный клапан, лобовое стекло и/или одно или более окон, дверей, зеркало заднего вида, правое зеркало бокового вида, левое зеркало бокового вида, ремни безопасности, подушки безопасности, колеса и шины.
[0088] Как показано на Фиг. 1А-1B и 2, транспортное средство 100 может включать в себя датчики 102, которые могут быть расположены в и вокруг транспортного средства подходящим образом. Все датчики 102 могут быть одинаковыми, или они могут отличаться друг от друга. Датчики 102 могут включать в себя много датчиков или только один датчик.
[0089] Некоторые из датчиков 102 могут быть выполнены с возможностью получения данных о среде, окружающей транспортное средство (например, датчики положения или датчики погоды), которая обозначена пунктирной линией на Фиг. 1А, при этом другие получают данные о компонентах самого транспортного средства (например, датчики уровня газа или датчики давления масла). Датчики 102 могут быть выполнены с возможностью передачи данных, которые они получают, одному или более контроллерам транспортного средства 100, например, контроллеру 210 (описанному ниже) для дальнейшей обработки. Датчики 102 могут включать в себя любой подходящий датчик или датчики, такие как, но не ограниченные ими: (1) инфракрасные датчики; (2) видеодатчики (такие как камеры); (3) ультразвуковые датчики; (4) радар; (5) лидар; (6) сканирующие лазерные датчики; (7) инерциальные датчики (например, инерциальный измерительный блок); (8) датчики скорости колес; (9) датчики дорожных условий (для непосредственного измерения определенных дорожных условий); (10) датчики дождя; (11) датчики высоты подвески; (12) датчики угла поворота рулевого колеса; (13) датчики момента рулевого управления; (14) датчики давления в тормозной системе; (15) датчики давления в шинах; или (16) датчики местоположения или навигации транспортного средства (такие как глобальная система позиционирования). Датчики 102 могут включать в себя датчики шестерен, выполненные с возможностью обнаружения зацепления шестерен трансмиссии транспортного средства, акселерометры, выполненные с возможностью обнаружения ускорения транспортного средства, датчики скорости для обнаружения скорости транспортного средства, скорости колес и/или скорости рулевого колеса, датчики крутящего момента для обнаружения выходного крутящего момента двигателя или мотора, крутящего момента привода на ведущие колеса и/или крутящего момента на колесах и датчики положения для обнаружения углового положения рулевого колеса, положения педали тормоза и/или положения зеркал. Некоторые датчики 102 могут быть установлены внутри пассажирского отсека транспортного средства 100, вокруг внешней стороны транспортного средства или в отсеке двигателя транспортного средства 100. По меньшей мере один датчик 102 может быть использован для идентификации водителя транспортного средства с помощью распознавания лица, распознавания речи или связи с устройством, таким как ключ транспортного средства или личный мобильный телефон водителя.
[0090] Датчики 102 могут иметь выключенное состояние и различные включенные состояния. Транспортное средство 100 или устройство, функционально соединенное с транспортным средством, может быть выполнено с возможностью управления состояниями или активностью датчиков. Следует принимать во внимание, что термин «внутренние датчики» включает в себя все датчики, установленные в транспортном средстве, включая датчики, которые установлены на внешней стороне транспортного средства 100.
[0091] Как показано на Фиг. 2, в одном варианте выполнения транспортное средство 100 включает в себя шину 202 данных транспортного средства, функционально соединенную с датчиками 102, устройствами 206 приводов транспортного средства, памятью или хранилищем 208 данных, процессором или контроллером 210, пользовательским интерфейсом 212, устройствами 214 связи и дисководом 216.
[0092] Процессор или контроллер 210 может представлять собой любое подходящее устройство обработки или набор устройств обработки, таких как, но не ограниченных ими: микропроцессор, платформа на базе микроконтроллера, подходящая интегральная схема или одна или более специализированных интегральных схем (ASIC).
[0093] Память 208 может представлять собой энергозависимую память (например, RAM, которая может включать в себя энергонезависимую RAM, магнитную RAM, ферроэлектрическую RAM и любые другие подходящие формы); энергонезависимую память (например, дисковую память, флэш-память, EPROM, EEPROM, энергонезависимую твердотельную память на базе мемристора и т.д.); неизменную память (например, EPROM); память только для чтения; накопитель на жестком диске; твердотельный накопитель на жестком диске; или физический диск, такой как DVD. В варианте выполнения память включает в себя множество видов памяти, особенно энергозависимую память и энергонезависимую память.
[0094] Устройства 214 связи могут включать в себя проводной или беспроводной сетевой интерфейс для обеспечения связи с внешней сетью. Внешняя сеть может представлять собой совокупность одной или более сетей, включающих в себя сети на базе стандартов (например, 2G, 3G, 4G, универсальную мобильную телекоммуникационную систему (UMTS), Ассоциацию GSM (R), стандарт долгосрочного развития (LTE) (TM) или более); WiMAX; Bluetooth; связь малого радиуса действия (NFC); WiFi (включая 802.11 a/b/g/n/ac или другие); WiGig; сети глобальной системы позиционирования (GPS); и другие, доступные во время подачи этой заявки, или те, которые могут быть разработаны в будущем. Дополнительно, внешняя сеть (сети) может представлять собой сеть общего пользования, такую как Интернет; частную сеть, такую как Интранет; или их комбинации, и может использовать множество сетевых протоколов, в настоящее время доступных или разработанных позже, включающих в себя, но не ограниченных ими, сетевые протоколы на базе TCP/IP. Устройства 214 связи также могут включать в себя проводной или беспроводной интерфейс для обеспечения прямой связи с электронным устройством, такой как интерфейс USB или Bluetooth.
[0095] Пользовательский интерфейс 212 может включать в себя любые подходящие устройства ввода и вывода. Устройства ввода позволяют водителю или пассажиру транспортного средства 100 вводить изменения или обновления в информацию, показываемую на, например, дисплее транспортного средства. Устройства ввода могут включать в себя, например, ручку управления, панель приборов, клавиатуру, сканер, цифровую камеру для захвата изображения и/или визуального распознавания команд, сенсорный экран, устройство ввода аудио (например, микрофон в кабине), кнопки, мышь или сенсорную панель. Устройства вывода могут включать в себя выводы на щитке приборов (например, шкалы, устройства освещения), исполнительные механизмы, дисплей (например, жидкокристаллический дисплей («LCD»), дисплей на органических светодиодах («OLED»), плоскопанельный дисплей, твердотельный дисплей, катодно-лучевая трубка («CRT») или дисплей на лобовом стекле) и динамики. Следует принимать во внимание, что термин «нажатие на кнопку или признак» также включает в себя нажатие на или активацию виртуальной кнопки или признака, например, использование мыши для выбора элемента на дисплее или нажатие на виртуальную кнопку на сенсорном экране.
[0096] Дисковод 216 выполнен с возможностью приема считываемого компьютером носителя. В некоторых вариантах выполнения дисковод 216 принимает считываемый компьютером носитель, на котором хранятся один или более наборов инструкций. Инструкции могут выполнять один или более из способов или логику, которые описаны здесь. В конкретном варианте выполнения инструкции могут находиться полностью или по меньшей мере частично в любом одном или более из основной памяти 208, считываемого компьютером носителя и/или в процессоре 210 во время исполнения инструкций.
[0097] Термин «считываемый компьютером носитель» следует понимать включающим в себя один носитель или множество носителей, таких как централизованная или распределенная база данных и/или связанные кэши и серверы, которые хранят один или более наборов инструкций. Термин «считываемый компьютером носитель» также включает в себя любой материальный носитель, который способен хранить, шифровать или переносить набор инструкций для исполнения процессором, или который заставляет систему выполнять любой один или более из способов или операций, раскрытых здесь.
[0098] В одном варианте выполнения транспортное средство 100 включает в себя одну или более компьютерных программ или подпрограмм 120, хранящихся в памяти 208. При исполнении процессором одна или более компьютерных программ или подпрограмм 120 генерирует или выбирает инструкции для выполнения другими элементами транспортного средства. В различных вариантах выполнения одна или более компьютерных программ или подпрограмм 120 выполнены с возможностью направления инструкций пользовательскому интерфейсу 212, устройствам 214 связи, приводу 206 транспортного средства, датчикам 102, процессору 210 и любому другому компоненту, функционально соединенному с шиной 202 данных транспортного средства. Следует принимать во внимание, что транспортное средство 100 может быть полностью автономным или частично автономным.
[0099] В различных вариантах выполнения вычислительное устройство 105 функционально соединено с транспортным средством 100 с помощью любого подходящего соединения для передачи данных, такого как WiFi, Bluetooth, USB или сотовое соединение для передачи данных. В одном варианте выполнения, показанном на Фиг. 3, вычислительное устройство 105 включает в себя шину 302 данных, функционально соединенную с датчиками 306, компонентами 316, памятью или хранилищем 308 данных, процессором или контроллером 310, пользовательским интерфейсом 312 и устройствами 314 связи. Следует принимать во внимание, что признаки вычислительного устройства 105 могут быть подобны признакам транспортного средства 100, которые описаны выше. Например, устройства 314 связи вычислительного устройства 105 могут работать подобно устройствам 214 связи транспортного средства 100. Это же относится и к пользовательскому интерфейсу 312, датчикам 306, хранилищу 308 данных, процессору 310 и дисководу 318. В различных вариантах выполнения вычислительное устройство 105 представляет собой мобильный телефон или сервер.
[00100] Обращаясь к Фиг. 4-5, показан примерный способ 400 обеспечения псевдонормального поведения педали во время получения приоритета педали. В этом варианте выполнения положение педали может считаться закрытым при 0% и полностью открытым при 100% хода или угла педали. Положение или угол педали могут быть обнаружены датчиком положения педали, который может передавать обнаруженный сигнал процессору в транспортном средстве, например, с помощью модуля получения приоритета перед ограничением скорости транспортного средства или модуля управления силовым агрегатом, имеющего процессор и память, для обработки в комбинации с данными о скорости и ускорении транспортного средства. Как показано на Фиг. 4(а), положение педали, в котором может происходить получение приоритета, ΘPEDAL@PO (элемент 420), лежит между положением педали, необходимым для поддержания транспортного средства на желаемом ограничении скорости, ΘPEDAL@SL (элемент 410), и 100% хода педали (элемент 430). Диапазон положения педали, сжатого до запуска получения приоритета педали, показан в виде элемента 440. После запуска получения приоритета педали оставшийся ход педали показан на Фиг. 4(b). Таким образом, в качестве примера, положение педали для поддержания установки скорости транспортного средства, например, 60 миль/ч (96,5606 км/ч) составляет 45% полного доступного хода педали, а положение педали, необходимое для запуска функции получения приоритета педали, составляет 70% полного хода, после возникновения получения приоритета педали доступный ход, оставшийся в педали во время получения приоритета педали, составляет 30%, оставляя водителя с ощущением сжатого диапазона доступного хода педали (элемент 450). Для обеспечения водителя согласованной реакцией ускорения после запуска получения приоритета педали оставшийся доступный ход педали могут перемасштабировать, как показано в элементе 460 на Фиг. 4(с). Это позволяет начинать получение приоритета педали при, например, 50% перемасштабированного положения педали для согласованной эксплуатации и ощущения водителя и простоты калибровки системы. Таким образом, для положений педали, выше которых может происходить получение приоритета:
[00101] Выше ΘPEDAL@PO → ΘSCALED_PEDAL=100 - (100 - ΘPEDAL)*[50/(100 - ΘPEDAL@PO)]
[00102] Используя вышеприведенный пример для положений педали, ниже которых может происходить получение приоритета, противоположное может быть справедливо. Например, как показано на Фиг. 5(а), для положений педали ниже положения для поддержания скорости транспортного средства на, например, 60 миль/ч (96,5606 км/ч) (элемент 470), этот диапазон представляется водителю как расширенный после запуска получения приоритета педали (элемент 480). Для обеспечения водителя согласованной реакцией ускорения после запуска получения приоритета педали оставшийся доступный ход педали могут перемасштабировать, как показано в элементе 490 на Фиг. 5(с). Это позволяет начинать получение приоритета педали при, например, 50% перемасштабированного положения педали для согласованной эксплуатации и ощущения водителем и простоты калибровки системы. Таким образом, для положений педали, ниже которых может происходить получение приоритета:
[00103] Ниже ΘPEDAL@PO → ΘSCALED_PEDAL=ΘPEDAL*(50/ΘPEDAL@PO)
[00104] Вышеупомянутое рассмотрение обеспечивает перемасштабированное положение педали с одной и той же дельтой независимо от того, тяжелым или легким является транспортное средство, и независимо от того, поднимается или спускается транспортное средство со склона.
[00105] Отсюда, как показано на Фиг. 6, запрос на ускорение при получении приоритета педали может быть построен с использованием ΘSCALED_PEDAL так, чтобы (1) обеспечивать обратную связь водителю о том, что произошло получение приоритета педали, а именно aOffset, (2) минимизировать большие или прерывистые увеличения запросов на крутящий момент во время работы при получении приоритета педали, (3) минимизировать ощущение отказавшей педали во время работы при получении приоритета педали, (4) обеспечивать постоянный запрос на ускорение для постоянного положения педали во время работы при получении приоритета педали, и (5) для увеличивающегося положения педали за пределы ΘPEDAL@PO, выполняется запрос на увеличивающееся ускорение, и наоборот, для уменьшающегося положения педали ниже ΘPEDAL@PO выполняется запрос на уменьшающееся ускорение.
[00106] Конкретнее, Фиг. 6 показывает характерную кривую 500 запроса на ускорение при получении приоритета педали на основе перемасштабированной педали, при этом ось Y представляет запрос на ускорение в момент инициации получения приоритета педали, а ось X представляет перемасштабированный ход педали от 0% до 100%. В масштабированном положении педали при получении приоритета педали, ΘSCALED_PEDAL@PO, обратная связь обеспечивается водителю в форме небольшого прироста запроса на ускорение, представленного как aOffset (элемент 502), для обеспечения подтверждения водителю о том, что водитель преодолел установку ограничения скорости. Это минимизирует возможность того, что транспортное средство кренится вперед из-за запроса на относительно большое ускорение, который обычно будет возникать с относительно большим ходом педали, требуемым для преодоления установки ограничения скорости. Таким образом, запрос на ускорение после входа в получение приоритета педали может быть представлен следующим образом:
[00107] aREQUEST=aSL_RQ_FINAL+aPO
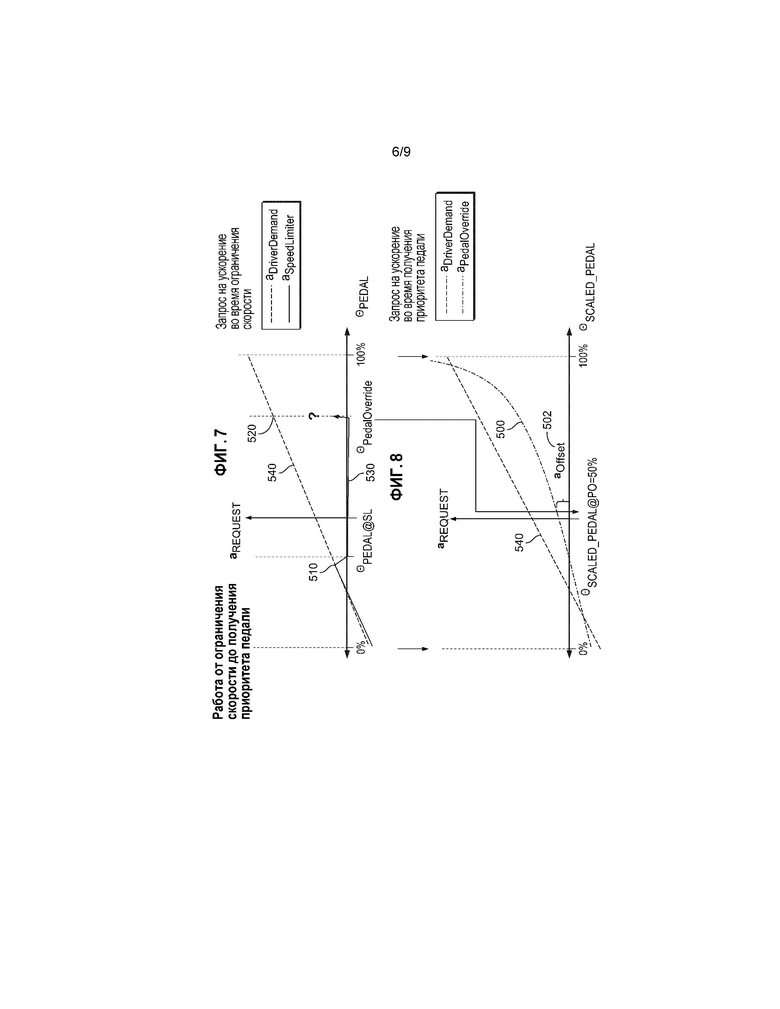
[00108] Обращаясь к Фиг. 7 и 8, показано характерное поведение запросов на ускорение во время ограничения скорости (Фиг. 7) и во время получения приоритета педали (Фиг. 8). Например, во время ограничения скорости ускорение транспортного средства может представлять собой минимум из двух ускорений - ускорения при ΘPEDAL@SL или ΘPEDAL@PO. При запуске получения приоритета педали цель заключается в приостановке или выходе из ограничения скорости (элемент 530) и возвращения к нормальной потребности водителя (элемент 540), но может существовать большое различие в величине двух ускорений, как показано на Фиг. 7 в элементах 510 и 520, соответственно.
[00109] Для минимизации различия и возможности колебания запроса на ускорение транспортного средства переход к работе при получении приоритета педали показан на Фиг. 8. Во время получения приоритета педали ускорение транспортного средства может по-прежнему представлять собой минимум из двух ускорений. Но перемасштабирование педали и использование ограничения ускорения, которое представляет собой функцию от перемасштабированного положения педали, обеспечивает псевдонормальное поведение педали акселератора.
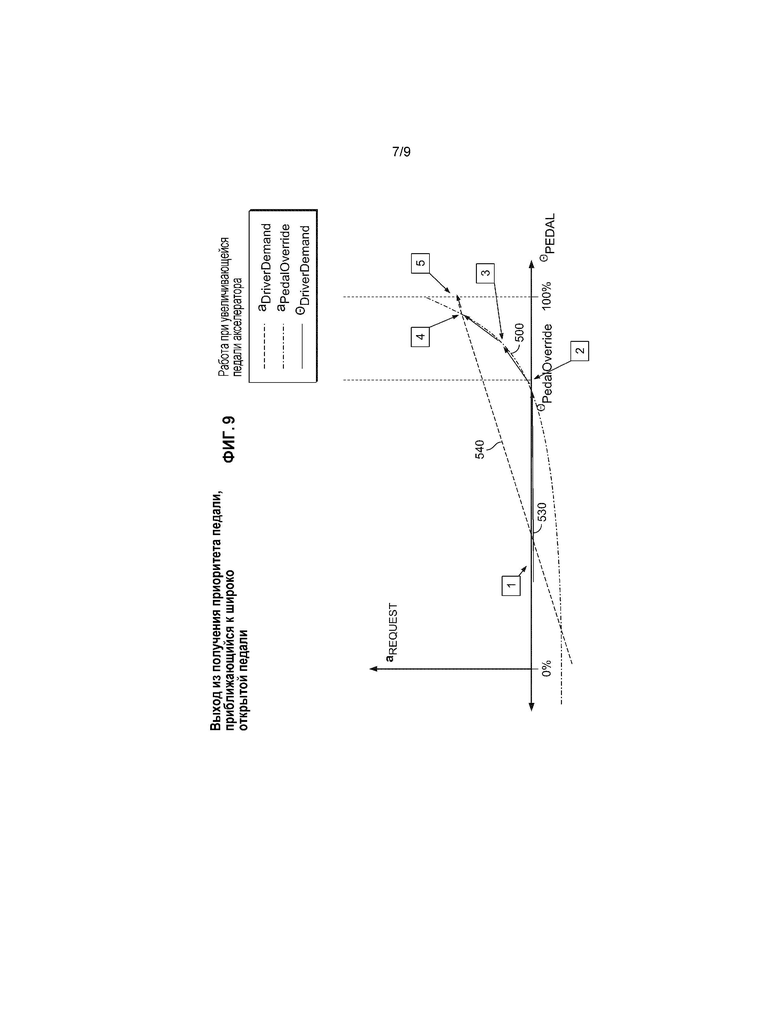
[00110] Обращаясь к Фиг. 9 и 10, показаны характерные решения для выхода из получения приоритета педали - при приближении к широко открытой педали (Фиг. 9) и при приближении к закрытой педали (Фиг. 10). В частности, Фиг. 9 показывает характерный вход в функциональность получения приоритета педали из установленной точки ограничения скорости, соединенный с выходом из функциональности получения приоритета педали при приближении к широко открытой педали (т.е. вблизи максимального хода педали), где запрос на ускорение (ось Y) представляют собой функцию от хода педали (ось X). Например, точка 1 на Фиг. 9 показывает транспортное средство при ограничении скорости (кривая 530) и то, где водитель увеличивает ход педали для инициации получения приоритета педали перед функцией ограничения скорости. На Фиг. 9, точка 2, запущено получение приоритета педали (т.е., ΘPedalOverride). Дальнейшие увеличения хода педали приводят к ускорению транспортного средства в режиме получения приоритета педали, обусловленному запросом на ускорение при получении приоритета педали, aPedalOverride, как представлено в точке 3 (кривая 500). Когда водитель продолжает увеличивать положение педали, в точке 4 кривая 500 запроса на ускорение при получении приоритета педали пересекается с кривой 540 запроса на ускорение потребности водителя, приводя к выходу из получения приоритета педали и дальнейшему продолжению запроса на ускорение вдоль кривой 540 запроса на ускорение нормальной потребности водителя для увеличивающегося хода педали, как показано в точке 5.
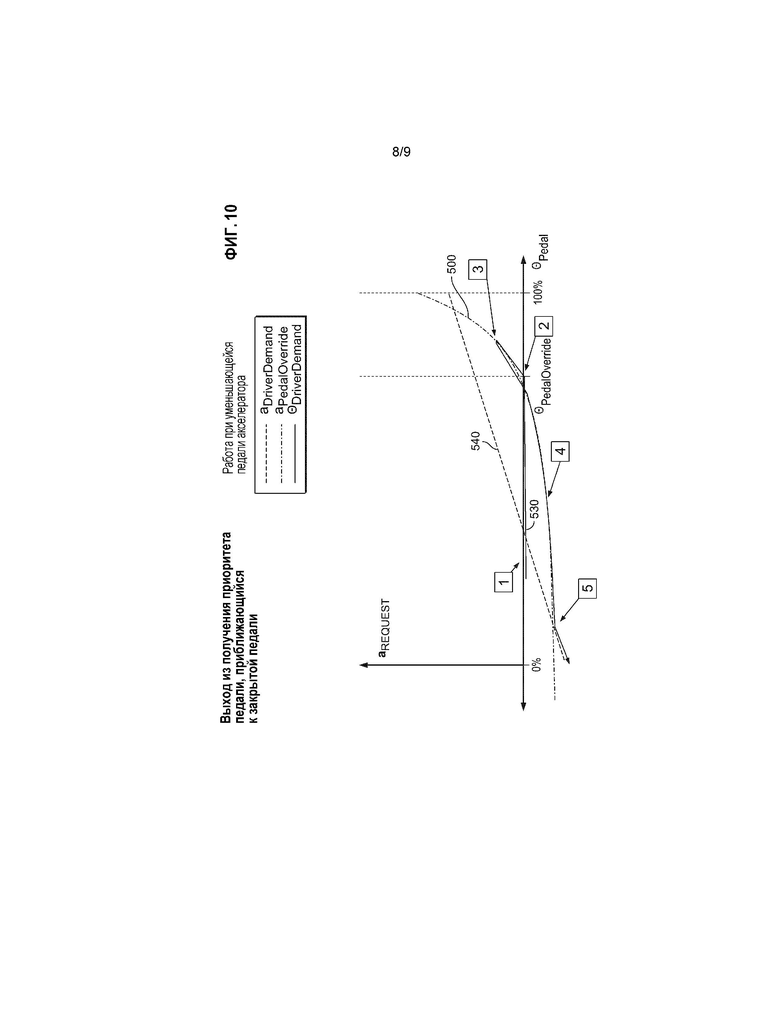
[00111] Фиг. 10 показывает, что происходит, когда уменьшающаяся педаль акселератора приближается к состоянию закрытой педали. Например, точка 1 на Фиг. 10 показывает транспортное средство при ограничении скорости (кривая 530) и то, где водитель увеличивает ход педали для инициации получения приоритета педали перед функцией ограничения скорости. На Фиг. 10, точка 2, запущено получение приоритета педали (т.е. ΘPedalOverride). Дальнейшие увеличения хода педали приводят к ускорению транспортного средства в режиме получения приоритета педали, обусловленному запросом на ускорение при получении приоритета педали, aPedalOverride, как представлено в точке 3 (кривая 500). Когда водитель уменьшает положение педали ниже точки запуска получения приоритета педали, ΘPedalOverride, запрос на ускорение уменьшается ниже оси X (т.е. указывая на запрос на замедление) вдоль кривой 500 до точки 4. Когда водитель продолжает уменьшать положение педали, в точке 5 кривая 500 запроса на ускорение при получении приоритета педали пересекается с кривой 540 запроса на ускорение потребности водителя, приводя к выходу из получения приоритета педали и дальнейшему продолжению запроса на ускорение вдоль кривой 540 запроса на ускорение нормальной потребности водителя для уменьшающегося хода педали.
[00112] Другое соображение заключается в том, что с перемасштабированной педалью, как раскрыто здесь, может существовать относительно большая величина хода педали ниже точки инициации получения приоритета педали. Водитель может воспринимать отпускание-нажатие педали как ощущение отказавшей педали, когда ничего не происходит с точки зрения ускорения, несмотря на перемещение водителем педали. Для решения этой проблемы может быть вызвана переинициализация точки запуска получения приоритета педали при нажатии педали акселератора, приводящая к возвращению положительного ускорения при нажатии.
[00113] Фиг. 11 показывает характерный пример того, как это может работать. Например, точка 1 на Фиг. 11 показывает транспортное средство при ограничении скорости (кривая 530) и то, где водитель увеличивает ход педали для инициации получения приоритета педали перед функцией ограничения скорости. На Фиг. 11, точка 2, запущено получение приоритета педали (т.е. ΘPedalOverride). Дополнительные увеличения хода педали приводят к ускорению транспортного средства в режиме получения приоритета педали, обусловленному запросом на ускорение при получении приоритета педали, aPedalOverride, как представлено в точке 3 (кривая 500). Когда водитель уменьшает положение педали ниже точки запуска получения приоритета педали, ΘPedalOverride, запрос на ускорение уменьшается ниже оси X (т.е. указывая на запрос на замедление) вдоль кривой 500 до точки 4. Когда водитель снова увеличивает положение педали, функциональность получения приоритета педали переинициализируется в новом положении получения приоритета педали (т.е. ΘPedalOverrideNEW), немедленно приводя к новому запросу на ускорение (aPedalOverrideNEW) без ощущения отказавшей педали для водителя, как представлено вдоль кривой 500'.
[00114] В другом варианте выполнения система может быть выполнена с возможностью предотвращения запуска уменьшающимся VSL получения приоритета педали. Конкретнее, так как точка запуска получения приоритета педали может быть основана на установленном водителем ограничении скорости, возможно, что водитель может иметь педаль, нажатую чуть меньше, чем точка запуска получения приоритета педали, и затем уменьшать ограничение скорости. Так как точка запуска получения приоритета педали может уменьшаться с новой установкой ограничения скорости, это может непреднамеренно запускать получение приоритета педали. Для обнаружения и устранения этой возможности система может быть выполнена с возможностью препятствования входа в получение приоритета педали, если водитель не увеличивает положение педали на желаемую величину, например, приблизительно 3% сверх установки ограничения скорости, до того, как педаль уменьшается до менее, чем новая точка запуска получения приоритета педали.
[00115] Несмотря на то, что конкретные варианты выполнения были описаны подробно, специалистами в области техники будет принято во внимание, что различные преобразования и альтернативы этим деталям могут быть разработаны в свете общих учений раскрытия. Соответственно, раскрытие здесь предназначено быть только иллюстративным, а не ограничивающим относительно его объема, и должно получать полный объем охраны приложенной формулы изобретения и любых ее эквивалентов.
Изобретение относится к системам безопасности транспортного средства. Система для получения приоритета перед установкой ограничения скорости транспортного средства с помощью получения приоритета педали акселератора. Транспортное средство включает в себя педаль акселератора, память для хранения фиксированного допуска получения приоритета педали и процессор, связанный с педалью и памятью. Процессор выполнен с возможностью определять пороговое значение получения приоритета, используя установленное ограничение скорости и фиксированный допуск получения приоритета педали, и входить в режим получения приоритета, когда положение педали превышает пороговое значение получения приоритета. Достигается повышение безопасности транспортного средства. 3 н. и 17 з.п. ф-лы, 12 ил.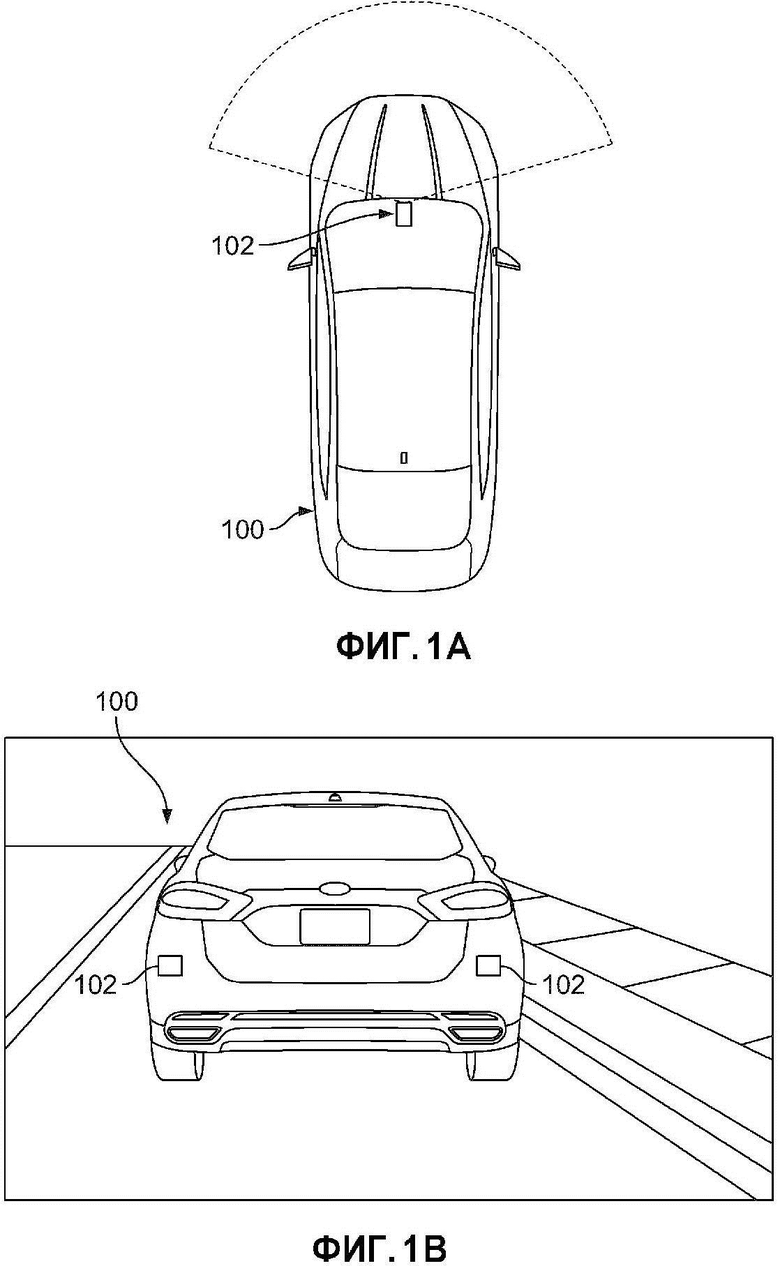
1. Система для получения приоритета перед установкой ограничения скорости транспортного средства с помощью получения приоритета педали акселератора, содержащая:
транспортное средство, включающее в себя:
педаль акселератора;
память для хранения фиксированного допуска получения приоритета педали; и
процессор, связанный с педалью и памятью и выполненный с возможностью:
определять пороговое значение получения приоритета, используя установленное ограничение скорости и фиксированный допуск получения приоритета педали; и
входить в режим получения приоритета, когда положение педали превышает пороговое значение получения приоритета.
2. Система по п. 1, в которой процессор выполнен с возможностью приема данных о положении педали.
3. Система по п. 1, в которой установление ограничения скорости основано на номинальном значении положения педали и значении компенсации нагрузки транспортного средства.
4. Система по п. 1, в которой процессор выполнен с возможностью обеспечения обратной связи водителю для указания на то, что произошло получение приоритета педали.
5. Система по п. 4, в которой обратная связь включает в себя желаемое отклонение ускорения транспортного средства от текущего ускорения транспортного средства, чтобы позволять водителю ощущать, когда запускается получение приоритета педали.
6. Система по п. 1, в которой процессор выполнен с возможностью выхода из режима получения приоритета педали, когда запрос на ускорение при получении приоритета педали, связанный с положением педали, становится больше, чем запрос на ускорение потребности водителя, связанный с положением педали.
7. Система по п. 1, в которой процессор выполнен с возможностью выхода из режима получения приоритета педали, когда запрос на ускорение при получении приоритета педали, связанный с положением педали, становится меньше, чем пороговое значение получения приоритета, и больше, чем запрос на ускорение потребности водителя, связанный с положением педали.
8. Транспортное средство, содержащее:
педаль акселератора;
память для хранения фиксированного допуска получения приоритета педали;
процессор, связанный с педалью акселератора и памятью и выполненный с возможностью:
определять актуальное значение положения педали ограничения скорости, связанное с установлением ограничения скорости транспортного средства;
определять значение положения педали порогового значения получения приоритета, используя актуальное значение положения педали ограничения скорости и фиксированный допуск получения приоритета педали; и
входить в режим получения приоритета для получения приоритета установления ограничения скорости транспортного средства, когда значение положения педали акселератора превышает значение положения порогового значения получения приоритета.
9. Транспортное средство по п. 8, в котором актуальное значение положения педали ограничения скорости основано на значении положения номинального ограничения скорости для установления ограничения скорости транспортного средства и значении положения компенсации.
10. Транспортное средство по п. 9, в котором значение положения компенсации основано на массе транспортного средства и уклоне дороги.
11. Транспортное средство по п. 8, в котором актуальное значение положения педали ограничения скорости основано на крутящем моменте двигателя и скорости двигателя, при установлении ограничения скорости транспортного средства.
12. Транспортное средство по п. 8, в котором педаль акселератора содержит датчик положения для генерирования значения положения педали.
13. Транспортное средство по п. 12, в котором процессор выполнен с возможностью принимать данные значения положения педали от датчика положения.
14. Транспортное средство по п. 8, в котором процессор выполнен с возможностью ускорять транспортное средство путем заранее установленного отклонения ускорения, когда введен режим получения приоритета.
15. Транспортное средство по п. 8, в котором процессор выполнен с возможностью выхода из режима получения приоритета, когда запрос на ускорение при получении приоритета педали, связанный со значением положения педали, соответствует запросу на ускорение потребности водителя, связанному со значением положения педали.
16. Способ получения приоритета перед установкой ограничения скорости транспортного средства, содержащий этапы, на которых:
определяют, посредством процессора транспортного средства, актуальное значение положения педали ограничения скорости транспортного средства, связанное с установлением ограничения скорости транспортного средства;
определяют, посредством процессора, значение положения педали порогового значения получения приоритета, используя актуальное значение положения педали ограничения скорости и фиксированный допуск получения приоритета педали; и
входят, посредством процессора, в режим получения приоритета для получения приоритета установления ограничения скорости транспортного средства, когда значение положения педали акселератора превышает значение положения порогового значения получения приоритета.
17. Способ по п. 16, в котором актуальное значение положения педали ограничения скорости основано на значении положения номинального ограничения скорости для установления ограничения скорости транспортного средства и значении положения компенсации.
18. Способ по п. 16, в котором актуальное значение положения педали ограничения скорости основано на крутящем моменте двигателя и скорости двигателя, при установлении ограничения скорости транспортного средства.
19. Способ по п. 16, содержащий также этап, на котором ускоряют, посредством процессора, транспортное средство путем заранее установленного отклонения ускорения, когда введен режим получения приоритета.
20. Способ по п. 16, содержащий также этап, на котором выходят, посредством процессора, из режима получения приоритета, когда запрос на ускорение при получении приоритета педали, связанный со значением положения педали, соответствует запросу на ускорение потребности водителя, связанному со значением положения педали.
| US 7204230 B2, 17.04.2007 | |||
| RU 2007127823 A, 27.01.2009. |

