[0001]
Настоящее изобретение относится к способу управления и устройству управления для гибридного транспортного средства.
[Уровень техники]
[0002]
Известно устройство регенеративного управления для гибридного транспортного средства (патентный документ 1). Гибридное транспортное средство имеет двигатель, первый электродвигатель для управления скоростью вращения двигателя, второй электродвигатель, который регенерирует инерционную энергию транспортного средства для выработки энергии, и устройство накопления электроэнергии, которое обменивается мощностью с первым электродвигателем и вторым электродвигателем. Устройство регенеративного управления включает в себя средство определения и средство ограничения зарядки. Средство определения определяет регенеративное состояние. В регенеративном состоянии во время регенеративного (рекуперативного) торможения, в котором второй электродвигатель приводится в действие инерционной энергией (энергией инерции) транспортного средства для выработки мощности, мощность, принимаемая устройством накопления электроэнергии, ограничивается, так что часть энергии, вырабатываемой вторым электродвигателем, подается к первому электродвигателю, который принудительно вращает двигатель. Когда определение регенеративного состояния установлено, средство ограничения зарядки уменьшает величину ослабления ограничения на мощность, принимаемую устройством накопления электроэнергии, по сравнению с тем, когда определение регенеративного состояния не установлено.
[Документ уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2010-23731A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Согласно вышеупомянутому уровню техники, когда выполняется регенерация энергии, величина ослабления ограничения на мощность, принимаемую устройством накопления электроэнергии, уменьшается, чтобы подавить изменение в подаваемой мощности на первый электродвигатель, который управляет скоростью вращения двигателя, и тем самым поддерживается скорость вращения двигателя. Тем не менее, когда потребляемая мощность при регенерации второго электродвигателя превышает ограничение мощности, принимаемой устройством накопления электроэнергии, скорость вращения двигателя не может поддерживаться. В таком случае, когда педаль акселератора нажата, а требуемое замедление уменьшается минимально, периодически происходит минимальное изменение скорости вращения двигателя, что может вызывать неприятные ощущения у водителя.
[0005]
Проблема, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы предоставить способ управления и устройство управления для гибридного транспортного средства, которые способны ослабить чувство дискомфорта, которое возникает у водителя.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую проблему посредством того, что когда требуемое замедление уменьшается, и при выполнении управления режимом электродвигателя запрошено приведение в действие двигателя генератором, накладывается ограничение на изменение скорости вращения двигателя.
[0007]
В общем случае, работа генератора для приведения в движение двигателя без нагрузки в состоянии, в котором прекращается подача топлива в двигатель, называется режимом электродвигателя (motoring, моторинговый режим), но в настоящем изобретении, как будет описано ниже, также в состоянии транспортного средства, в котором входная мощность для аккумулятора ограничена, при этом генератор работает для приведения в действие двигателя без нагрузки с использованием энергии аккумулятора, чтобы гарантировать величину регенерации с помощью электродвигателя, называется режимом электродвигателя.
[Эффект изобретения]
[0008]
Согласно настоящему изобретению ощущение дискомфорта, испытываемое водителем, может быть ослаблено.
[Краткое описание чертежей]
[0009]
Фиг. 1 является блок-схемой, иллюстрирующей вариант осуществления гибридного транспортного средства, к которому применяется способ управления гибридным транспортным средством согласно настоящему изобретению.
Фиг. 2 - блок-схема управления, иллюстрирующая основную конфигурацию системы управления для гибридного транспортного средства по Фиг. 1.
Фиг. 3 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления целевой движущей силы по Фиг. 2.
Фиг. 4 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления целевой потребляемой мощности по Фиг. 2.
Фиг. 5 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления целевой достигаемой скорости вращения двигателя по Фиг. 2.
Фиг. 6 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления целевой скорости вращения двигателя с учетом скорости изменения по Фиг. 2.
Фиг. 7 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления для требуемого дополнительного замедления за счет потребляемой мощности по Фиг. 6.
Фиг. 8 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления целевой скорости вращения двигателя по Фиг. 6.
Фиг. 9 - блок-схема управления, иллюстрирующая основную конфигурацию другого целевого блока вычисления скорости вращения двигателя по Фиг. 6.
Фиг. 10 - блок-схема управления, иллюстрирующая конфигурацию блока вычисления значения команды скорости вращения электродвигателя генератора по Фиг. 6.
Фиг. 11 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления целевого приводного крутящего момента двигателя по Фиг. 2.
Фиг. 12A является блок-схемой, иллюстрирующей основное содержание обработки, выполняемой контроллером транспортного средства по Фиг. 1 и 2.
Фиг. 12B является блок-схемой, иллюстрирующей основное содержание обработки, выполняемой контроллером транспортного средства по Фиг. 1 и 2.
Фиг. 13 представляет собой набор временных диаграмм, иллюстрирующих поведение соответствующих параметров в типичной сцене (во время регенерации) для гибридного транспортного средства, показанного на Фиг. 1.
Фиг. 14 представляет собой набор временных диаграмм, иллюстрирующих поведение соответствующих параметров в типичной сцене (во время регенерации) для гибридного транспортного средства, показанного на Фиг. 1.
Фиг. 15 представляет собой набор временных диаграмм, иллюстрирующих поведение соответствующих параметров в типичной сцене (во время регенерации) для гибридного транспортного средства, показанного на Фиг. 1.
Фиг. 16 представляет собой набор временных диаграмм, иллюстрирующих поведение соответствующих параметров в типичной сцене (во время регенерации) для гибридного транспортного средства, показанного на Фиг. 1.
Фиг. 17 представляет собой набор временных диаграмм, иллюстрирующих поведение соответствующих параметров в типичной сцене (во время регенерации) для гибридного транспортного средства, показанного на Фиг. 1.
[Вариант(ы) осуществления изобретения]
[0010]
«Механическая конфигурация гибридного автомобиля»
Фиг. 1 является блок-схемой, иллюстрирующей вариант осуществления гибридного транспортного средства, к которому применяется способ управления гибридным транспортным средством согласно настоящему изобретению. Гибридное транспортное средство 1 по настоящему варианту осуществления включает в себя двигатель 11, генератор 12, электродвигатель 13, аккумулятор 14, ведущие колеса 15 и 15, ведущие оси 16 и 16 и дифференциал 17. Гибридное транспортное средство 1 по настоящему варианту осуществления представляет собой транспортное средство, в котором ведущие колеса 15 и 15 приводятся в движение только движущей силой электродвигателя 13, а не движущей силой двигателя 11. Этот тип гибридного транспортного средства 1 называется последовательным гибридным транспортным средством, в отличие от параллельного гибридного транспортного средства и гибридного транспортного средства с разделением мощности, поскольку двигатель 11, электродвигатель 13 и ведущие колеса 15 и 15 соединены последовательно (последовательное соединение).
[0011]
Двигатель 11 согласно настоящему варианту осуществления управляется для запуска и остановки с помощью значения команды крутящего момента двигателя, которое вводится от контроллера 21 двигателя, что будет описано позже. Запуск двигателя во время запуска осуществляется движущей силой от генератора 12, который выполнен в виде электродвигателя-генератора. Затем управление впрыском топлива, управление количеством всасываемого воздуха, управление зажиганием и другое управление параметрами приведения в действие двигателя 11 выполняются в соответствии со значением команды крутящего момента двигателя, и двигатель 11 приводится в движение со скоростью вращения, определенной в соответствии со значением команды крутящего момента двигателя. Двигатель 11 имеет выходной вал 111, который механически соединен с вращающимся валом 121 генератора 12 через ускоряющую передачу 112. Таким образом, когда двигатель 11 приводится в движение, вращающийся вал 121 генератора 12 вращается в соответствии с коэффициентом увеличения скорости ускоряющей передачи 112 (который может быть постоянным коэффициентом увеличения скорости или переменным коэффициентом увеличения скорости). В результате генератор 12 вырабатывает электрическую мощность с величиной выработки мощности, соответствующей скорости вращения вращающегося вала 121.
[0012]
Двигатель 11 также служит нагрузкой при разряде электрической мощности во время регенерации электродвигателем 13, что будет описано позже. Например, когда желательно добиться торможения двигателя электродвигателем 13 в соответствии с состоянием заряда (SOC) аккумулятора 14, электрическая мощность, регенерированная электродвигателем 13, подается в генератор 12, который служит в качестве электродвигателя-генератора, и избыточная мощность может быть разряжена так, что генератор 12 приводит в действие двигатель 11 без нагрузки, в котором впрыск топлива прекращен.
[0013]
Генератор 12 согласно настоящему варианту осуществления служит не только в качестве генератора, но также в качестве двигателя (электродвигателя) посредством управления переключением, выполняемого первым инвертором 141. Генератор 12 служит в качестве двигателя при выполнении описанной выше операции запуска двигателя во время запуска двигателя 11 или в процессе разгрузки мощности от электродвигателя 13. Достаточно, однако, того, что генератор 12 служит, по меньшей мере, в качестве двигателя, чтобы реализовать способ управления и устройство для управления гибридным транспортным средством в соответствии с настоящим изобретением.
[0014]
Генератор 12 согласно настоящему варианту осуществления электрически соединен с аккумулятором 14 через первый инвертор 141, так что электрическая энергия может передаваться и приниматься. Кроме того, генератор 12 по настоящему варианту осуществления электрически соединен с электродвигателем 13 через первый инвертор 141 и второй инвертор 142, так что электроэнергия может передаваться и приниматься. Первый инвертор 141 преобразует энергию переменного тока, генерируемую генератором 12, в энергию постоянного тока и подает энергию постоянного тока на аккумулятор 14 и/или второй инвертор 142. Первый инвертор 141 также преобразует энергию постоянного тока, подаваемую от аккумулятора 14 и/или второго инвертора 142, в энергию переменного тока и подает энергию переменного тока в генератор 12. Первый инвертор 141 и генератор 12 управляются значением команды скорости вращения от контроллера 22 генератора, которое будет описано позже.
[0015]
Аккумулятор 14 по настоящему варианту осуществления, который состоит из вторичного аккумулятора, такого как литий-ионный аккумулятор, принимает и накапливает электроэнергию, генерируемую генератором 12 через первый инвертор 141, а также принимает и накапливает электроэнергию, регенерированную электродвигателем 13 через второй инвертор 142. Хотя иллюстрация опущена, аккумулятор 14 также может быть выполнен с возможностью зарядки от внешнего коммерческого источника питания. Аккумулятор 14 по настоящему варианту осуществления подает накопленную электрическую мощность на электродвигатель 13 через второй инвертор 142 для приведения в действие электродвигателя 13. Аккумулятор 14 по настоящему варианту осуществления также подает накопленную электрическую мощность на генератор 12, который служит в качестве двигателя, через первый инвертор 141 для приведения в действие генератора 12 и выполняет запуск двигателя 11, работу двигателя без нагрузки и т.д. Аккумулятор 14 контролируется контроллером 23 аккумулятора, который выполняет управление зарядкой/разрядкой в соответствии с состоянием заряда SOC. Что касается источника электропитания для электродвигателя 13 по настоящему варианту осуществления, аккумулятор 14 может использоваться в качестве основного источника питания, в то время как генератор 12 может использоваться в качестве вспомогательного источника питания, или генератор 12 может использоваться в качестве основного источника питания, в то время как аккумулятор 14 может использоваться в качестве вспомогательного источника питания. Чтобы реализовать способ управления и устройство для управления гибридным транспортным средством согласно настоящему изобретению, не обязательно требуется аккумулятор 14, показанный на Фиг. 1, и аккумулятор 14 может быть опущен при необходимости, при условии, что предусмотрен аккумулятор для запуска двигателя 11, и номинальная генерируемая мощность генератора 12 достаточно велика для движения гибридного транспортного средства 1. Режим движения может быть установлен, когда переключатель рычага переключения передач установлен в положение движения или в положение тормоза.
[0016]
Электродвигатель 13 по настоящему варианту осуществления имеет вращающийся вал 131, который соединен с входным валом 171 дифференциальной передачи 17 посредством понижающей передачи 132. Крутящий момент вращающегося вала 131 электродвигателя 13 передается на понижающую передачу 132 и дифференциальную передачу 17. Дифференциальная передача 17 делит крутящий момент на правую и левую составляющие, которые соответственно передаются на правое и левое ведущие колеса 15 и 15 через правую и левую ведущие оси 16 и 16. Это позволяет ведущим колесам 15 и 15 вращаться в соответствии с приводным крутящим моментом электродвигателя 13, и гибридное транспортное средство 1 движется вперед или назад. Коэффициент уменьшения скорости понижающей передачи 132 может быть фиксированным коэффициентом уменьшения или также может быть переменным коэффициентом уменьшения. Например, трансмиссия может быть предусмотрена в качестве замены понижающей передачи 132.
[0017]
Предусмотрен датчик 27 переключателя рычага переключения передач/датчик переключения режима движения (который в дальнейшем также будет называться датчиком 27 S/M). Датчик 27 S/M включает в себя датчик переключения рычага переключения, который обнаруживает переключатель рычага переключения. Переключатель рычага переключения передач представляет собой переключатель рычажного типа, который может выбирать любое из нейтрального положения, положения парковки, положения движения, заднего хода и положения тормоза. Переключатель рычага переключения обычно устанавливается на центральной консоли и т.п. рядом с сиденьем водителя. Когда выбрано положение движения, электродвигатель 13 вращается в направлении, соответствующем направлению движения вперед транспортного средства, и когда выбирается положение заднего хода, электродвигатель 13 вращается обратно в направлении, соответствующем направлению движения назад транспортного средства. Положение тормоза относится к положению, в котором целевая регенеративная движущая сила электродвигателя 13 относительно скорости движения задается большей, и когда педаль акселератора отпускается, электродвигатель 13 достигает торможения двигателя, которое является достаточно сильным, чтобы остановить гибридное транспортное средство 1 без использования тормоза. Датчик 27 S/M дополнительно включает в себя датчик переключения режима движения, который обнаруживает переключатель режима движения. Переключатель режима движения относится, например, к кнопочному или дисковому переключателю для переключения между множеством режимов движения, таких как режим нормального движения, режим эко-движения и режим спортивного движения, в которых профили целевой движущей силы относительно скорости транспортного средства и положения педали акселератора различны (режимы движения будут описаны позже со ссылкой на Фиг. 3). Переключатель режима движения обычно устанавливается на центральной консоли или тому подобном рядом с сиденьем водителя.
[0018]
Электродвигатель 13 согласно настоящему варианту осуществления служит не только в качестве двигателя, но также и в качестве генератора (электрического генератора) посредством управления переключением, выполняемого вторым инвертором 142. Электродвигатель 13 служит в качестве генератора при зарядке вышеописанного аккумулятора 14 в случае низкого уровня заряда SOC или когда необходимо добиться регенеративного торможения во время замедления. Однако достаточно того, что электродвигатель 13 служит, по меньшей мере, в качестве электродвигателя, чтобы реализовать способ управления и устройство для управления гибридным транспортным средством в соответствии с настоящим изобретением.
[0019]
Электродвигатель 13 согласно настоящему варианту осуществления электрически соединен с аккумулятором 14 через второй инвертор 142, так что электрическая мощность может передаваться и приниматься. Кроме того, электродвигатель 13 согласно настоящему варианту осуществления электрически соединен с генератором 12 через первый инвертор 141 и второй инвертор 142, так что электрическая энергия может передаваться и приниматься. Второй инвертор 142 преобразует энергию постоянного тока, подаваемую от аккумулятора 14 и/или первого инвертора 141, в энергию переменного тока и подает энергию переменного тока в электродвигатель 13. Второй инвертор 142 также преобразует энергию переменного тока, генерируемую электродвигателем 13, в энергию постоянного тока и подает энергию постоянного тока на аккумулятор 14 и/или первый инвертор 141. Второй инвертор 142 и электродвигатель 13 управляются значением команды приводного крутящего момента от контроллера 24 электродвигателя, которое будет описано позже.
[0020]
Как описано выше, в гибридном транспортном средстве 1 согласно настоящему варианту осуществления, когда водитель нажимает педаль акселератора после включения выключателя питания и отпускания бокового тормоза, требуемый приводной крутящий момент, соответствующий величине нажатия педали акселератора, вычисляется посредством контроллера транспортного средства 20. Значение команды приводного крутящего момента выводится на второй инвертор 142 и электродвигатель 13 через контроллер 24 электродвигателя, и электродвигатель 13 приводится в действие для генерирования крутящего момента, соответствующего значению команды приводного крутящего момента. Это позволяет вращаться ведущим колесам 15 и 15, и гибридное транспортное средство 1 движется. В этой операции выполняется определение относительно того, следует ли приводить в действие двигатель 11, на основе входных значений от датчика 25 акселератора, датчика 26 скорости транспортного средства и датчика 27 S/M и состояния заряда. Состояние аккумулятора 14 контролируется контроллером 23 аккумулятора, и когда необходимые условия удовлетворяются, гибридное транспортное средство 1 движется во время движения двигателя 11.
[0021]
Во время движения гибридного транспортного средства 1, например, когда водитель отпускает педаль акселератора, контроллер 20 транспортного средства вычисляет требуемый крутящий момент (требуемый регенеративный крутящий момент), соответствующий положению педали акселератора или тому подобное. В этой операции для регенеративной мощности, вырабатываемой электродвигателем 13, делается определение относительно того, следует ли использовать генератор 12 для приведения в действие двигателя 11 в соответствии с мощностью, которая может быть введена в аккумулятор 14 (в дальнейшем называемой допустимой входной мощностью аккумулятора), на основе входных значений от датчика 25 акселератора, датчика 26 скорости транспортного средства и датчика 27 S/M и состояния заряда SOC аккумулятора 14, отслеживаемого контроллером 23 аккумулятора. Когда регенеративная мощность электродвигателя 13 не превышает допустимую входную мощность аккумулятора, для подавления входной мощности аккумулятора аккумулятор 12 может не работать. С другой стороны, когда целевая регенеративная мощность электродвигателя 13 превышает допустимую входную мощность аккумулятора, генератор 12 приводится в действие для приведения в действие двигателя 11, так что электроэнергия, которая не может подаваться на аккумулятор 14, потребляется приведением в действие двигателя 11. В этой операции топливо 11 не подается в двигатель. Таким образом, при приведении электродвигателя 13 в регенеративное состояние контроллер 20 транспортного средства приводит в действие генератор 12 для приведения в действие двигателя 11 в состоянии, в котором подача топлива в двигатель 11 прекращается, тем самым, в соответствии с требуемым регенеративным режимом, выполняя управление крутящим моментом для обеспечения величины регенерации электродвигателя 13. Конфигурация системы управления будет описана ниже, включая управление приведением в действие для двигателя 11. Следующая конфигурация системы управления является конфигурацией для выполнения регенеративного управления.
[0022]
«Конфигурация системы управления гибридным транспортным средством»
Фиг. 2 является блок-схемой управления, иллюстрирующей основную конфигурацию системы управления для гибридного транспортного средства 1 согласно настоящему варианту осуществления, проиллюстрированному на Фиг. 1. Как показано на Фиг. 2, система управления по настоящему варианту осуществления включает в себя контроллер 23 аккумулятора, датчик 25 акселератора, датчик 26 скорости транспортного средства и датчик 27 S/M в качестве входных элементов, а также контроллер 21 двигателя, контроллер 22 генератора и контроллер 24 электродвигателя в качестве выходных целевых элементов. Соответствующие сигналы от входных элементов обрабатываются контроллером 20 транспортного средства и выводятся в качестве сигналов управления на выходные целевые элементы.
[0023]
Контроллер 23 аккумулятора в качестве входного элемента вычисляет текущую допустимую входную мощность аккумулятора (Вт) из текущего состояния заряда SOC (например, от 0% до 100%) и номинальной выходной мощности аккумулятора 14, подлежащей контролю, и выводит вычисленную текущую допустимую входную мощность аккумулятора (Вт) для блока 202 вычисления целевой потребляемой мощности. Датчик 25 акселератора в качестве входного элемента обнаруживает величину нажатия педали акселератора, которую водитель нажимает и отпускает, и выводит обнаруженную величину нажатия в качестве положения педали акселератора (например, от 0% до 100%) в блок вычисления целевой движущей силы 201. Датчик 26 скорости транспортного средства в качестве входного элемента вычисляет скорость транспортного средства на основе скорости вращения вращающегося вала 131 электродвигателя 13, коэффициента уменьшения скорости понижающей передачи 132 и радиуса ведущих колес 15, например, и выводит вычисленную скорость транспортного средства в блок 201 вычисления целевой движущей силы, блок 202 вычисления целевой потребляемой мощности и блок 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения. Датчик 27 S/M в качестве входного элемента выводит сигнал переключения передач и сигнал режима в блок 201 вычисления целевой движущей силы и в блок 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения. Сигнал переключения передач выбирается с помощью описанного выше переключателя рычага переключения передач (любой из нейтрального положения, положения парковки, положения движения, заднего хода и положения тормоза). Сигнал режима выбирается с помощью описанного выше переключателя режима движения (любой из режима нормального движения, режима эко-движения и режима спортивного движения).
[0024]
Команда прекращения подачи топлива, которая выводится из блока 202 вычисления целевой потребляемой мощности, вводится в контроллер 21 двигателя в качестве выходного целевого элемента. На основе команды прекращения подачи топлива контроллер 21 двигателя управляет подачей топлива в двигатель 11. Значение команды скорости вращения генератора, которое вычисляется блоком 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения, вводится в контроллер 22 генератора в качестве выходного элемента. На основе значения команды скорости вращения генератора контроллер 22 генератора управляет электрической энергией, подаваемой в генератор 12. Предусмотрен блок 205 вычисления целевого приводного крутящего момента двигателя, который вычисляет значение команды приводного крутящего момента двигателя. Значение команды приводного крутящего момента двигателя вводится в контроллер 24 электродвигателя в качестве выходного элемента, который управляет регенеративной мощностью электродвигателя 13. Значение команды приводного крутящего момента двигателя является основным значением команды для управления гибридным транспортным средством 1 для движения в соответствии с управлением педалью акселератора водителем. В последующем описании операции воздействия на акселератор включают в себя не только ручное вождение, выполняемое водителем, но также и операцию ускорения на основе значения команды акселератора, которое вычисляется с использованием так называемой автоматической (автономной) функции вождения в гибридном транспортном средстве, имеющем такое функцию автоматического (автономного) вождения.
[0025]
Далее будет описана конфигурация контроллера 20 транспортного средства. Контроллер 20 транспортного средства обрабатывает соответствующие сигналы от вышеописанных входных элементов и выводит управляющие сигналы на выходные целевые элементы. Контроллер 20 транспортного средства по настоящему варианту осуществления включает в себя блок 201 вычисления целевой движущей силы, блок 202 вычисления целевой потребляемой мощности, блок 203 вычисления целевой достигаемой скорости вращения двигателя, блок 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения и блок 205 вычисления целевого приводного крутящего момента двигателя.
[0026]
Контроллер 20 транспортного средства выполнен в виде компьютера, на котором установлено аппаратное и программное обеспечение. Более конкретно, контроллер 20 транспортного средства выполнен с возможностью включать в себя постоянное запоминающее устройство (ROM), в котором хранятся программы, центральный процессор (CPU), который выполняет программы, хранящиеся в ROM, и оперативное запоминающее устройство (RAM), которое служит в качестве доступного устройства хранения. Микропроцессорный блок (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. могут использоваться в качестве рабочей схемы в качестве замены или дополнения для процессора. Вышеописанный блок 201 вычисления целевой движущей силы, блок 202 вычисления целевой потребляемой мощности, блок 203 вычисления целевой достигаемой скорости вращения двигателя, блок 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения и блок 205 вычисления целевого крутящего момента двигателя привода выполняют соответствующие функции, которые будут описаны ниже, с помощью программного обеспечения, установленного в ROM. Аналогично, контроллер 21 двигателя, контроллер 22 генератора и контроллер 24 электродвигателя в качестве выходных целевых элементов и контроллер 23 аккумулятора в качестве входного элемента каждый сконфигурированы как компьютер, на котором установлено аппаратное и программное обеспечение, то есть сконфигурированы для включения ROM, в котором хранятся программы, процессора (или MPU, DSP, ASIC или FPGA), который выполняет программы, хранящиеся в ROM, и RAM, которое служит доступным устройством хранения.
[0027]
Фиг. 3 является блок-схемой управления, иллюстрирующей основную конфигурацию блока 201 вычисления целевой движущей силы по Фиг. 2. Положение педали акселератора от датчика 25 акселератора, скорость транспортного средства от датчика 26 скорости транспортного средства и соответствующие сигналы положения переключения и режима движения от датчика 27 S/M вводятся в блок 201 вычисления целевой движущей силы, который выводит целевую движущую силу Fd и значение команды приводного крутящего момента двигателя. Контроллер 20 транспортного средства включает в себя память, в которой хранятся соответствующие взаимосвязи управления в трех режимах движения, то есть в режиме спортивного движения, в режиме нормального движения и в режиме эко-движения, для каждого из положений переключения (положения движения и положения тормоза). Взаимосвязи включают в себя три взаимосвязи управления в трех режимах движения: режим спортивного движения, режим нормального движения и режим эко-движения. Аналогичным образом, также сохраняются взаимосвязи управления в трех режимах движения: режим спортивного движения, режим нормального движения и режим эко-движения, когда выбрано положение тормоза. Три режима движения, соответствующие каждому положению переключения, различаются по величине целевой движущей силы (вертикальная ось) относительно скорости транспортного средства (горизонтальная ось) и величины нажатия педали акселератора (несколько линий). В режиме спортивного движения целевая движущая сила в отношении скорости транспортного средства и величины нажатия педали акселератора задается относительно большой, в то время как в режиме эко-движения целевая движущая сила в отношении скорости транспортного средства и величины нажатия педали акселератора устанавливается относительно малой, а среднее значение устанавливается в режиме нормального движения. Режимы движения для каждого положения переключения соответствуют описанию движения согласно настоящему изобретению.
[0028]
Соответствующие сигналы положения переключения и режима движения от датчика 27 S/M вводятся в блок 201 вычисления целевой движущей силы, который извлекает взаимосвязь управления в режиме движения, соответствующем положению переключения, и извлекает соответствующую целевую движущую силу в соответствии с положением педали акселератора от датчика 25 акселератора и скоростью транспортного средства от датчика 26 скорости транспортного средства. Целевая движущая сила преобразуется в блоке в целевой приводной крутящий момент двигателя с использованием динамического радиуса ведущих колес 15 и передаточного числа понижающей передачи 132. Здесь, если полученный целевой приводной крутящий момент двигателя превышает верхнее предельное значение крутящего момента, которое предварительно установлено, верхнее предельное значение крутящего момента задается в качестве целевого приводного крутящего момента двигателя, тогда как если полученный целевой приводной крутящий момент двигателя меньше нижнего предельного значения крутящего момента, которое предварительно установлено, то нижнее предельное значение крутящего момента устанавливается в качестве целевого значения приводного крутящего момента двигателя. Затем целевой приводной крутящий момент двигателя, полученный таким образом, выводится в качестве значения команды приводного крутящего момента двигателя на электродвигатель 13. Кроме того, целевой приводной крутящий момент двигателя, полученный таким образом, преобразуется в блоке в целевую движущую силу Fd с использованием динамического радиуса ведущих колес 15 и передаточного числа понижающей передачи 132, и целевая движущая сила Fd выводится в блок 202 вычисления целевой потребляемой мощности и блок 205 вычисления целевого приводного крутящего момента двигателя.
[0029]
Фиг. 4 является блок-схемой управления, иллюстрирующей основную конфигурацию блока 202 вычисления целевой потребляемой мощности по Фиг. 2. Целевая движущая сила Fd из блока 201 вычисления целевой движущей силы вводится в блок 202 вычисления целевой потребляемой мощности, который сравнивает целевую движущую силу с предварительно определенным значением (0), чтобы определить, является ли целевая движущая сила Fd отрицательной или минусовой движущей силой. Когда целевая движущая сила Fd является регенеративной движущей силой, целевая движущая сила Fd умножается на скорость транспортного средства, чтобы вычислить требуемую регенеративную мощность. Требуемая регенеративная мощность - это регенеративная мощность, которая требуется для транспортного средства. Блок 202 вычисления целевой потребляемой мощности вычитает допустимую входную мощность аккумулятора из требуемой регенеративной мощности. Допустимая входная мощность аккумулятора определяется в соответствии с SOC. Блок 202 вычисления целевой потребляемой мощности сравнивает значение, полученное вычитанием допустимой входной мощности аккумулятора из требуемой регенеративной мощности, с предварительно определенным значением (0) и выводит более высокое значение в качестве целевой потребляемой мощности Pc. Таким образом, мощность, полученная вычитанием допустимой входной мощности аккумулятора из требуемой регенеративной мощности, соответствует целевой потребляемой мощности, которая потребляется при запуске двигателя 11. Когда значение, полученное посредством вычитания, больше 0, блок 202 вычисления целевой потребляемой мощности выводит запрос CR потребляемой мощности. Когда запрос на прекращение подачи топлива вводится из-за системного запроса или тому подобного, или когда вводится запрос потребления мощности, блок 202 вычисления целевой потребляемой мощности выводит команду на прекращение подачи топлива.
[0030]
Фиг. 5 является блок-схемой управления, иллюстрирующей основную конфигурацию блока 203 вычисления целевой достигаемой скорости вращения двигателя по Фиг. 2. Контроллер 20 транспортного средства включает в себя память, в которой хранится взаимосвязь управления для требуемой достигаемой скорости вращения двигателя относительно целевой потребляемой мощности, как показано на Фиг. 5. Целевая потребляемая мощность Pc вводится в блок 203 вычисления целевой достигаемой скорости вращения двигателя, который обращается к взаимосвязи управления, показанной на Фиг. 5, чтобы извлечь требуемую достигаемую скорость вращения двигателя. Когда требуемая достигаемая скорость вращения двигателя ниже, чем предварительно установленный нижний предел скорости вращения двигателя, блок 203 вычисления целевой достигаемой скорости вращения двигателя устанавливает нижнюю предельную скорость вращения двигателя в качестве целевой достигаемой скорости вращения двигателя, тогда как когда требуемая достигаемая скорость вращения двигателя выше, чем предварительно установленная верхняя предельная скорость вращения двигателя, блок 203 вычисления целевой достигаемой скорости вращения двигателя устанавливает верхнюю предельную скорость вращения двигателя в качестве целевой достигаемой скорости вращения двигателя. Затем блок 203 вычисления целевой достигаемой скорости вращения двигателя выводит целевую достигаемую скорость Nt вращения двигателя.
[0031]
Фиг. 6 - блок-схема управления, иллюстрирующая основную конфигурацию блока 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения по Фиг. 2. Блок 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения включает в себя блок 2041 вычисления для требуемого дополнительного замедления за счет потребляемой мощности (в дальнейшем этот блок будет называться просто блоком 2041 вычисления требуемого дополнительного замедления), блок 2042 вычисления целевой скорости вращения двигателя, другой блок 2043 вычисления целевой скорости вращения двигателя и блок 2044 вычисления значения команды скорости вращения электродвигателя-генератора. Скорость транспортного средства от датчика 26 скорости транспортного средства, положение педали акселератора от датчика 25 акселератора, соответствующие сигналы положения переключения и режима движения от датчика 27 S/M, целевая потребляемая мощность от блока 202 вычисления целевой потребляемой мощности, и целевая достигаемая скорость вращения двигателя из блока 203 вычисления целевой достигаемой скорости вращения двигателя вводятся в блок 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения, который выполняет процессы, которые будут описаны ниже, а затем выводит значение команды скорости вращения генератора к контроллеру генератора 22. В блоках 2042 и 2043 вычисления целевой скорости вращения двигателя по Фиг. 6, верхний блок управления отвечает за процесс при увеличении скорости вращения двигателя, в то время как нижний блок управления отвечает за процесс при уменьшении скорости вращения двигателя. Процессы, выполняемые блоком 2041 вычисления требуемого дополнительного замедления, блоком 2042 вычисления целевой скорости вращения двигателя, блоком 2043 вычисления целевой скорости вращения двигателя и блоком 2044 вычисления значения команды скорости вращения электродвигателя генератора, будут описаны ниже в этом порядке.
[0032]
Как показано на Фиг. 7, блок 2041 вычисления требуемого дополнительного замедления делит целевую потребляемую мощность Pc на скорость транспортного средства для вычисления требуемого дополнительного замедления за счет потребляемой мощности DR и выводит вычисленное значение. Это позволяет преобразовать целевую потребляемую мощность в требуемое замедление при текущей скорости транспортного средства. Целевая потребляемая мощность Pc относится к мощности, потребляемой генератором 12, приводящим в движение двигатель 11, которая получается путем вычисления требуемой регенеративной мощности из целевой движущей силы Fd, то есть требуемого замедления и вычитания допустимой входной мощности аккумулятора из требуемой регенеративной мощности. Следовательно, требуемое дополнительное замедление за счет потребляемой мощности DR, вычисляемое блоком 2041 вычисления требуемого дополнительного замедления, соответствует требуемому замедлению водителем, то есть замедлению, покрываемому управлением режимом электродвигателя в целевой движущей силе Fd. Требуемое замедление или целевая движущая сила Fd и требуемое дополнительное замедление за счет потребляемой мощности могут изменяться аналогичным образом, поскольку допустимая входная мощность аккумулятора быстро не изменяется. Например, когда требуемое замедление или целевая движущая сила увеличивается, требуемое дополнительное замедление за счет потребляемой мощности также увеличивается в своем значении аналогичным образом. В последующем описании изменение (увеличение/уменьшение) требуемого замедления соответствует любому изменению (увеличению/уменьшению) требуемого дополнительного замедления за счет потребления мощности и изменению (увеличению/уменьшению) целевой движущей силы.
[0033]
Как показано на Фиг. 8, скорость транспортного средства, целевая достигаемая скорость вращения двигателя Nt и требуемое дополнительное замедление за счет потребления мощности DR вводятся в блок 2042 вычисления целевой скорости вращения двигателя, который выполняет процессы вычисления, которые будут описаны ниже, чтобы вычислять целевую скорость вращения двигателя NBu, и выводит целевую скорость вращения двигателя NBu для значения команды скорости вращения генератора. Контроллер 20 транспортного средства включает в себя память, которая хранит взаимосвязь, которая представляет собой взаимосвязь между требуемым замедлением за счет потребляемой мощности и базовой целевой скоростью увеличения скорости вращения двигателя (далее также называемой первой взаимосвязью), взаимосвязь, которая представляет собой взаимосвязь между разницей между целевой достигаемой скоростью вращения двигателя и конечной целевой скоростью Nc вращения двигателя, соответствующей фактической скорости вращения двигателя, и скоростью увеличения скорости вращения двигателя во время достижения (также называемой в дальнейшем второй взаимосвязью), и взаимосвязь, которая представляет собой взаимосвязь между скоростью транспортного средства и скоростью увеличения скорости вращения двигателя во время работы без водителя (также называемой в дальнейшем третьей взаимосвязью). Эти взаимосвязи показаны на Фиг. 8. Первая взаимосвязь имеет взаимосвязь, в которой скорость увеличения (скорость изменения) скорости вращения двигателя увеличивается пропорционально увеличению требуемого дополнительного замедления, в то время как, когда требуемое дополнительное замедление становится предварительно определенным значением или более, скорость увеличения скорость вращения двигателя уменьшается. То есть скорость увеличения скорости вращения двигателя увеличивается по мере того, как увеличивается требуемое дополнительное замедление, в то время как, когда требуемое дополнительное замедление представляет собой предварительно определенное значение или более, скорость увеличения скорости вращения двигателя является небольшим значением. Вторая взаимосвязь имеет взаимосвязь, в которой скорость увеличения скорости вращения двигателя изменяется пропорционально разнице между целевой достигаемой скоростью вращения двигателя и конечной целевой скоростью вращения двигателя. То есть скорость увеличения скорости вращения двигателя уменьшается по мере того, как уменьшается разница между целевой достигаемой скоростью вращения двигателя и конечной целевой скоростью вращения двигателя. Третья взаимосвязь имеет взаимосвязь, в которой скорость увеличения скорости вращения двигателя во время операций, не связанных с водителем, изменяется пропорционально скорости транспортного средства.
[0034]
Требуемое дополнительное замедление за счет потребляемой мощности DR вводится в блок 2042 вычисления целевой скорости вращения двигателя, который обращается к проиллюстрированной первой взаимосвязи для извлечения базовой целевой скорости увеличения скорости вращения двигателя NRBu. Кроме того, блок 2042 вычисления целевой скорости вращения двигателя вычисляет разницу между целевой достигаемой скоростью вращения двигателя и конечной целевой скоростью вращения двигателя и обращается ко второй взаимосвязи с вычисленной разностью в качестве входных данных для извлечения скорости увеличения скорости вращения двигателя для воспроизведения ощущения повышения или понижения звука двигателя NRGu. Затем блок 2042 вычисления целевой скорости вращения двигателя сравнивает базовую целевую скорость NRBu увеличения скорости вращения двигателя со скоростью увеличения скорости вращения двигателя для воспроизведения ощущения повышения или понижения звука двигателя NRGu и выбирает меньшую скорость увеличения (логика выбора низкого уровня). Выбранная скорость увеличения определяется как скорость увеличения скорости вращения двигателя во время запроса NRDu потребляемой мощности.
[0035]
При увеличении скорости вращения двигателя в соответствии с увеличением требуемого дополнительного замедления за счет потребления мощности при выполнении управления режимом электродвигателя, при котором величина нажатия педали акселератора становится меньшей величиной из более высокого значения, например, из-за действия водителя, контроллер 20 транспортного средства увеличивает скорость вращения двигателя, используя скорость увеличения скорости вращения двигателя, так что текущая скорость вращения двигателя достигает целевой достигаемой скорости вращения двигателя. В этой операции потребляемая мощность от приведения в движение двигателя увеличивается по мере того, как увеличивается требуемое замедление за счет потребления мощности; поэтому, чтобы получить ощущение замедления, которое не доставляет неудобного ощущения водителю, скорость вращения двигателя, возможно, придется быстро увеличить. Дополнительно или в качестве альтернативы, для достижения ощущения повышения или понижения звука двигателя при ощущении замедления требуемого дополнительного замедления за счет потребления мощности, скорость увеличения скорости вращения двигателя, возможно, должна постепенно уменьшаться со временем.
[0036]
В начальной точке, в которой скорость вращения двигателя начинает увеличиваться, разница между целевой скоростью вращения двигателя и текущей скоростью вращения двигателя является большой, поэтому скорость увеличения скорости вращения двигателя, вычисленная с использованием второй взаимосвязи, также является большой. Соответственно, блок 2042 вычисления целевой скорости вращения двигателя выбирает базовую целевую скорость NRBu увеличения скорости вращения двигателя в качестве скорости увеличения скорости вращения двигателя во время запроса NRDu потребления мощности. В первой взаимосвязи, поскольку требуемое дополнительное замедление за счет потребления мощности увеличивается, скорость увеличения скорости вращения двигателя увеличивается. Если смотреть с начальной точки увеличения скорости вращения двигателя, скорость вращения двигателя изменяется с высокой скоростью увеличения, и скорость увеличения увеличивается по мере того, как увеличивается требуемое замедление за счет потребления мощности. Это может облегчить ощущение дискомфорта, испытываемое водителем из-за того, что тормозное усилие слабое. Кроме того, по мере того, как время истекает из начальной точки увеличения скорости вращения двигателя, текущая скорость вращения двигателя приближается к целевой скорости вращения двигателя; следовательно, разница между целевой скоростью вращения двигателя и текущей скоростью вращения двигателя уменьшается, и скорость NRGu увеличения скорости вращения двигателя, вычисленная с использованием второй взаимосвязи, также уменьшается. Затем, когда скорость NRGu увеличения скорости вращения двигателя становится меньше, чем скорость NRBu увеличения скорости вращения двигателя, вычисленная с использованием первой взаимосвязи, блок 2041 вычисления требуемого дополнительного замедления выбирает скорость увеличения скорости вращения двигателя для воспроизведения ощущения повышения или понижения звука двигателя NRGu как скорости увеличения скорости вращения двигателя при запросе потребления мощности NRDu. То есть, когда время истекает из начальной точки увеличения скорости вращения двигателя, и текущая скорость вращения двигателя приближается к целевой скорости вращения двигателя, скорость увеличения скорости вращения уменьшается, и, таким образом, можно достичь ощущения замедления с ощущением повышения или понижения звука двигателя.
[0037]
Блок 2042 вычисления целевой скорости вращения двигателя обращается к третьей взаимосвязи со скоростью транспортного средства в качестве входных данных для извлечения скорости увеличения скорости вращения двигателя во время работы без водителя NRNu. Скорость увеличения скорости вращения двигателя во время работы без водителя NRNu - это скорость увеличения скорости вращения двигателя, когда скорость вращения двигателя увеличивается из-за требования, отличного от требования водителя, такого как системное требование. Блок 2042 вычисления целевой скорости вращения двигателя сравнивает скорость увеличения скорости вращения двигателя во время запроса потребления мощности со скоростью увеличения скорости вращения двигателя во время работы без водителя и устанавливает более высокую скорость увеличения скорости вращения в качестве целевой скорости увеличения скорости вращения двигателя. Блок 2042 вычисления целевой скорости вращения двигателя добавляет целевую скорость увеличения скорости вращения двигателя к конечной целевой скорости вращения двигателя (предыдущее значение) для вычисления целевой скорости вращения двигателя.
[0038]
Как показано на Фиг. 9, целевая потребляемая мощность Pc, скорость транспортного средства, целевая скорость вращения двигателя с учетом скорости изменения (предыдущее значение), положение педали акселератора и сигнал переключения/режима вводятся в блок 2043 вычисления целевой скорости вращения двигателя, который выполняет процессы вычисления, которые будут описаны ниже, чтобы вычислить целевую скорость вращения двигателя, и выводит целевую скорость вращения двигателя для значения команды скорости вращения генератора.
[0039]
Контроллер 20 транспортного средства включает в себя память, в которой хранится взаимосвязь, которая представляет собой взаимосвязь между целевой потребляемой мощностью и базовой скоростью уменьшения скорости вращения целевого двигателя (в дальнейшем называемая четвертой взаимосвязью), взаимосвязь, которая представляет собой взаимосвязь между величиной изменения положения педали акселератора и коэффициента усиления (в дальнейшем называемая пятой взаимосвязью), и взаимосвязь, которая представляет собой взаимосвязь между скоростью транспортного средства и скоростью увеличения скорости вращения двигателя во время работы без водителя (в дальнейшем называемая шестой взаимосвязью). Эти взаимосвязи показаны на Фиг. 9.
[0040]
Четвертая взаимосвязь имеет взаимосвязь, в которой базовая целевая скорость уменьшения скорости вращения двигателя уменьшается пропорционально увеличению целевой потребляемой мощности, в то время как, когда целевая потребляемая мощность становится заданным пороговым значением или более, базовая целевая скорость уменьшения скорости вращения двигателя становится нулевой. То есть, когда целевая потребляемая мощность представляет собой предварительно определенное значение или более, скорость уменьшения скорости вращения двигателя является постоянной скоростью. На четвертой взаимосвязи, когда целевая потребляемая мощность становится заданным пороговым значением или более, базовая целевая скорость уменьшения скорости вращения двигателя может не обязательно становиться нулевой (или постоянной скоростью), и достаточно, чтобы базовая целевая скорость уменьшения скорости вращения двигателя становилась меньше чем скорость уменьшения скорости вращения, когда целевая потребляемая мощность выше предварительно определенного порога. Пятая взаимосвязь имеет взаимосвязь, в которой усиление уменьшается пропорционально увеличению величины изменения положения педали акселератора. Усиление - это усиление для подавления уменьшения скорости вращения двигателя во время операции воздействия на акселератор. Шестая взаимосвязь имеет взаимосвязь, в которой скорость увеличения скорости вращения двигателя во время работы без водителя изменяется пропорционально скорости транспортного средства.
[0041]
Блок 2043 вычисления целевой скорости вращения двигателя обращается к проиллюстрированной четвертой взаимосвязи с целевой потребляемой мощностью Pc в качестве входных данных для извлечения базовой целевой скорости уменьшения скорости вращения двигателя NRBd.
[0042]
Когда требуемое дополнительное замедление за счет потребляемой мощности велико в состоянии управления режимом электродвигателя, скорость вращения двигателя велика, и водитель может слышать звук вращения двигателя. Когда операция воздействия на акселератор выполняется в состоянии, в котором продолжается управление режимом электродвигателя, требуемое дополнительное замедление за счет потребления мощности уменьшается. В это время, если скорость вращения двигателя изменяется так, чтобы соответствовать изменению требуемого дополнительного замедления за счет потребления мощности в момент, когда выполняется операция воздействия на акселератор, водитель может испытывать неприятные ощущения. Чтобы смягчить такое неприятное ощущение, необходимо ограничить изменение скорости вращения двигателя, когда требуемое дополнительное замедление за счет потребления мощности уменьшается во время выполнения управления режимом электродвигателя. Кроме того, когда водитель нажимает педаль акселератора, из-за запроса на ускорение в состоянии управления режимом электродвигателя, если скорость вращения двигателя не уменьшается быстро, скорость вращения двигателя не будет увеличиваться во время последующего ускорения, и у водителя может возникнуть ощущение дискомфорта. Чтобы смягчить такое неприятное ощущение, необходимо увеличить скорость уменьшения скорости вращения двигателя, поскольку требуемое дополнительное замедление за счет потребления мощности уменьшается во время выполнения управления режимом электродвигателя.
[0043]
Водитель управляет акселератором в состоянии, в котором осуществляется управление режимом электродвигателя и скорость вращения двигателя высокая. В это время положение педали акселератора находится в менее нажатом положении, и управление режимом электродвигателя продолжается. Операция нажатия педали акселератора уменьшает целевую потребляемую мощность Pc, но степень уменьшения целевой потребляемой мощности мала, потому что положение педали акселератора все еще находится в менее нажатом положении. На четвертой взаимосвязи, когда целевая потребляемая мощность Pc выше предварительно определенного значения (на первой взаимосвязи, показанной на Фиг. 9, потребляемая мощность, соответствующая точке сгиба графика), скорость уменьшения скорости вращения двигателя устанавливается равной небольшому значению (ноль в примере на Фиг. 9). Следовательно, в момент времени, когда начинается операция воздействия на акселератор, скорость уменьшения скорости вращения двигателя является небольшим значением, когда целевая потребляемая мощность Pc является предварительно определенным значением или более, и изменение скорости вращения двигателя ограничено. Это может подавить уменьшение скорости вращения двигателя и ослабить чувство дискомфорта, которое возникает у водителя.
[0044]
Кроме того, на четвертой взаимосвязи, когда целевая потребляемая мощность Pc становится ниже предварительно определенного значения, скорость уменьшения скорости вращения двигателя увеличивается, и, когда целевая потребляемая мощность Pc уменьшается, скорость уменьшения скорости вращения двигателя увеличивается. Это позволяет быстро уменьшать скорость вращения двигателя после снятия ограничения на изменение скорости вращения двигателя; следовательно, скорость вращения двигателя может быть увеличена во время ускорения, и ощущение дискомфорта, испытываемое водителем, может быть уменьшено.
[0045]
Блок 2043 вычисления целевой скорости вращения двигателя получает разницу между текущим положением педали акселератора и положением педали акселератора во время выполнения процесса предварительно определенное число раз назад и вычисляет величину изменения в положении педали акселератора. Положение педали акселератора во время выполнения процесса заданное количество раз назад может быть положением педали акселератора во время предыдущего процесса или также может быть средним из множества положений педали акселератора, полученных в процессах до последнего процесса. Блок 2043 вычисления целевой скорости вращения двигателя обращается к пятой взаимосвязи, чтобы извлечь усиление AG, соответствующее величине изменения положения педали акселератора. Блок 2043 вычисления целевой скорости вращения двигателя умножает базовую целевую скорость уменьшения скорости вращения двигателя NRBd, вычисленную с использованием четвертой взаимосвязи, на коэффициент усиления AG для вычисления целевой скорости уменьшения скорости вращения двигателя во время действий NRDd водителя.
[0046]
Блок 2043 вычисления целевой скорости вращения двигателя сравнивает величину изменения положения педали акселератора с пороговым значением. Порог устанавливается для каждого режима движения, и блок 2043 вычисления целевой скорости вращения двигателя извлекает порог, соответствующий режиму движения. Когда величина изменения в положении педали акселератора превышает пороговое значение, флаг, указывающий результат определения операции воздействия на акселератор водителем, устанавливается в установленное состояние. Установленное состояние указывает, что водитель выполняет операцию воздействия на акселератор. С другой стороны, когда величина изменения в положении педали акселератора ниже порогового значения, флаг, указывающий результат определения операции воздействия на акселератор водителем, переводится в состояние сброса. Состояние сброса указывает, что водитель не выполняет операцию воздействия на акселератор.
[0047]
Когда флаг, указывающий результат определения операции воздействия на акселератор, находится в установленном состоянии, блок 2043 вычисления целевой скорости вращения двигателя устанавливает целевую скорость уменьшения скорости вращения двигателя во время действий NRDd водителя в качестве целевой скорости уменьшения скорости вращения двигателя во время запроса NRd потребления мощности. С другой стороны, когда флаг, указывающий результат определения операции воздействия на акселератор, находится в состоянии сброса, блок 2043 вычисления целевой скорости вращения двигателя устанавливает целевую скорость уменьшения скорости вращения двигателя во время работы без водителя NRNd в качестве целевой скорости уменьшения скорости вращения двигателя при запросе потребления мощности NRd.
[0048]
Кроме того, когда флаг, указывающий результат определения операции воздействия на акселератор, находится в состоянии сброса, блок 2043 вычисления целевой скорости вращения двигателя выполняет следующие процессы вычисления. Блок 2043 вычисления целевой скорости вращения двигателя вычитает целевую скорость уменьшения скорости вращения двигателя в предыдущем процессе из целевой скорости уменьшения скорости вращения двигателя во время работы без водителя и сравнивает значение, полученное вычитанием (далее также называемое «величиной изменения скорости уменьшения скорости вращения двигателя относительно предыдущего значения») с пороговым значением. Когда значение, полученное в результате вычитания, превышает пороговое значение, блок 2043 вычисления целевой скорости вращения двигателя выполняет вычисление с логическим значением «1», в то время как, когда значение, полученное в результате вычитания, не превышает пороговое значение, блок 2043 вычисления целевой скорости вращения двигателя выполняет вычисление с логическим значением «0».
[0049]
Блок 2043 вычисления целевой скорости вращения двигателя выполняет процесс вычисления NOT для флага, указывающего результат определения операции воздействия на акселератор, и инвертирует флаг, указывающий результат определения операции воздействия на акселератор. То есть, как показано на Фиг. 9, когда отсутствует действие водителя, флаг (определение перехода к скорости уменьшения скорости вращения двигателя во время работы без водителя) становится равным «1», тогда как при действии водителя флаг (определение перехода к скорости уменьшения скорости вращения двигателя во время работы без водителя) становится равным «0». Блок 2043 вычисления целевой скорости вращения двигателя выполняет процесс вычисления И для логического значения, указывающего величину величины изменения в скорости уменьшения скорости вращения и флаг. Когда и логическое значение, указывающее величину изменения в скорости уменьшения скорости вращения, и флаг (определение перехода к скорости уменьшения скорости вращения двигателя во время работы без водителя) равны «1», блок 2043 вычисления целевой скорости вращения двигателя переключает переключатель (SW) для вывода заданной скорости. Скорость является значением для подавления скорости уменьшения скорости вращения двигателя, когда водитель не выполняет операцию воздействия на акселератор, и плавного изменения скорости вращения двигателя. Скорость предварительно устанавливается и устанавливается, например, на фиксированное значение меньше 1. Затем блок 2043 вычисления целевой скорости вращения двигателя добавляет скорость к целевой скорости уменьшения скорости вращения двигателя в предыдущем процессе, чтобы вычислять целевую скорость уменьшения скорости вращения двигателя для подавления внезапного изменения скорости вращения двигателя NRkd (также называемой целевой скоростью уменьшения скорости вращения двигателя для подавления, в дальнейшем). Когда одно из логического значения, указывающего величину изменения в скорости уменьшения скорости вращения, и флага (определение перехода к скорости уменьшения скорости вращения двигателя во время работы без водителя) равно «0», блок 2043 вычисления целевой скорости вращения двигателя переключает переключатель (SW) так, что выводится величина изменения скорости уменьшения скорости вращения двигателя относительно предыдущего значения. Затем блок 2043 вычисления целевой скорости вращения двигателя добавляет величину изменения в скорости уменьшения скорости вращения двигателя относительно предыдущего значения к целевой скорости уменьшения скорости вращения двигателя в предыдущем процессе, чтобы получить целевую скорость уменьшения скорости вращения двигателя для подавления внезапного изменения скорости вращения двигателя NRkd.
[0050]
Блок 2043 вычисления целевой скорости вращения двигателя сравнивает целевую скорость уменьшения скорости вращения двигателя во время запроса NRd потребляемой мощности с целевой скоростью уменьшения скорости вращения двигателя для подавления NRkd и выбирает меньшую скорость уменьшения скорости вращения (логика выбора низкого уровня). Когда процесс вычисления многократно выполняется блоком 2043 вычисления целевой скорости вращения двигателя в состоянии, в котором переключатель (SW) переключается так, что выводится предварительно определенная скорость, целевая скорость уменьшения скорости вращения двигателя для подавления NRkd постепенно увеличивается из-за прибавки скорости. Затем, когда целевая скорость уменьшения скорости вращения двигателя для подавления NRkd становится больше, чем целевая скорость уменьшения скорости вращения двигателя во время запроса NRd потребления мощности, целевая скорость уменьшения скорости вращения двигателя во время запроса NRd потребления мощности выбирается с учетом целевой скорости уменьшения скорости вращения двигателя во время запроса NRd потребляемой мощности и целевой скорости уменьшения скорости вращения двигателя для подавления NRkd для логики выбора низкого уровня. Блок 2043 вычисления целевой скорости вращения двигателя вычитает выбранную целевую скорость уменьшения из конечной целевой скорости вращения двигателя (предыдущее значение) для вычисления целевой скорости вращения двигателя NBd.
[0051]
Здесь работа участка, окруженного пунктирной линией A, в блоках управления, показанных на Фиг. 9, будет описана. Как описано выше, в случае, когда водитель нажимает педаль акселератора, из-за запроса на ускорение из состояния, в котором скорость вращения двигателя является высокой под управлением режимом электродвигателя, когда требуемое дополнительное замедление за счет потребления мощности уменьшается и выдается запрос на приведение в действие двигателя 11, скорость уменьшения скорости вращения двигателя становится постоянной, тем самым ограничивая изменение скорости вращения двигателя. Затем, когда целевая потребляемая мощность вследствие приведения в движение двигателя 11 уменьшается, ограничение на изменение скорости вращения двигателя снимается, и скорость вращения двигателя быстро уменьшается. В этой операции, когда водитель поддерживает постоянное положение педали акселератора, например, увеличение величины нажатия педали акселератора подавляется, и требуемое дополнительное замедление за счет потребления мощности становится постоянным. Затем, когда величина изменения в положении педали акселератора ниже порогового значения, флаг, указывающий результат определения операции воздействия на акселератор водителем, находится в состоянии, в котором действие водителя не выполняется. Кроме того, целевая потребляемая мощность из-за приведения в действие двигателя 11 не равна нулю, и скорость вращения двигателя продолжает уменьшаться; следовательно, разница между целевой скоростью уменьшения скорости вращения двигателя во время работы без водителя и целевой скоростью уменьшения скорости вращения двигателя во время предыдущего процесса становится больше порогового значения, и логическое значение становится равным «1». Условие И между логическим значением, указывающим величину величины изменения в скорости уменьшения скорости вращения, и флагом (определение перехода к скорости уменьшения скорости вращения двигателя во время работы без водителя) удовлетворяется, и скорость добавляется к скорости уменьшения скорости вращения двигателя. Посредством этой операции, когда требуемое дополнительное замедление за счет потребления мощности становится постоянным, в то время как скорость вращения двигателя быстро уменьшается после снятия ограничения на изменение скорости вращения двигателя, скорость уменьшения скорости вращения двигателя уменьшается. Другими словами, когда изменение требуемого замедления приостанавливается и требуемое дополнительное замедление за счет потребления мощности становится постоянным, наклон в направлении уменьшения скорости вращения двигателя становится умеренным.
[0052]
Как показано на Фиг. 10, целевая достигаемая скорость вращения двигателя, целевая скорость вращения двигателя (во время увеличения скорости вращения двигателя) NBu, целевая скорость вращения двигателя (во время уменьшения скорости вращения двигателя) NBd и запрос CR потребления мощности вводятся в блок 2044 вычисления значения команды скорости вращения электродвигателя генератора, который выполняет процессы вычисления, которые будут описаны ниже, чтобы вычислить конечную целевую скорость Nc вращения двигателя и значение команды скорости вращения электродвигателя генератора, выводит конечную целевую скорость Nc вращения двигателя на блок 205 вычисления целевого приводного крутящего момента двигателя и выводит значение команды скорости вращения электродвигателя генератора в контроллер 22 генератора.
[0053]
Блок 2044 вычисления значения команды скорости вращения электродвигателя генератора сравнивает целевую достигаемую скорость Nt вращения двигателя с целевой скоростью вращения двигателя (во время уменьшения скорости вращения двигателя) NBd. Когда целевая достигаемая скорость вращения Nt двигателя ниже, чем целевая скорость вращения двигателя NBd (во время уменьшения скорости вращения двигателя), блок 2044 вычисления значения команды скорости вращения электродвигателя генератора устанавливает целевую скорость вращения двигателя (во время уменьшения скорости вращения двигателя) NBd как целевую скорость вращения двигателя во время запроса потребления мощности. Кроме того, блок 2044 вычисления значения команды скорости вращения электродвигателя генератора сравнивает целевую достигаемую скорость Nt вращения двигателя с целевой скоростью вращения двигателя (во время увеличения скорости вращения двигателя) NBu. Когда целевая достигаемая скорость вращения Nt двигателя выше, чем целевая скорость вращения двигателя (во время увеличения скорости вращения двигателя) NBu, блок 2044 вычисления значения команды скорости вращения электродвигателя генератора устанавливает целевую скорость вращения двигателя (во время увеличения скорости вращения двигателя) NBu как целевую скорость вращения двигателя при запросе потребления мощности Nt. Когда есть запрос потребления мощности, блок 2044 вычисления значения команды скорости вращения электродвигателя генератора устанавливает целевую скорость вращения двигателя во время запроса потребления мощности в качестве конечной целевой скорости Nc вращения двигателя. Когда нет запроса потребления мощности, блок 2044 вычисления значения команды скорости вращения электродвигателя генератора устанавливает целевую скорость вращения двигателя во время запроса без потребления мощности в качестве конечной целевой скорости Nc вращения двигателя.
[0054]
Блок 2044 вычисления значения команды скорости вращения электродвигателя генератора делит конечную целевую скорость вращения двигателя Nc на коэффициент увеличения скорости для вычисления значения команды вращения электродвигателя генератора.
[0055]
Фиг. 11 - блок-схема управления, иллюстрирующая основную конфигурацию блока 205 вычисления целевого приводного крутящего момента двигателя по Фиг. 2. Контроллер 20 транспортного средства включает в себя память, в которой хранится взаимосвязь управления оценочной потребляемой мощностью по отношению к целевой скорости вращения двигателя в качестве целевой скорости изменения, как показано на Фиг. 11. Целевая скорость вращения двигателя с учетом скорости изменения соответствует конечной целевой скорости вращения двигателя Nc, вычисленной блоком 2044 вычисления значения команды скорости вращения. Целевая скорость вращения двигателя Nc в качестве рассматриваемой целевой скорости изменения вводится в блок 205 вычисления целевого приводного крутящего момента двигателя, который обращается к взаимосвязи управления, показанной на Фиг. 11, для вычисления оценочной потребляемой мощности. Оценочная потребляемая мощность является оценочной величиной потребляемой мощности от генератора, приводящего двигатель 11 в действие.
[0056]
Чтобы преобразовать оценочную потребляемую мощность в движущую силу, блок 205 вычисления целевого приводного крутящего момента двигателя делит оценочную потребляемую мощность на скорость транспортного средства, чтобы вычислить базовую целевую регенеративную силу после ограничения. Блок 205 вычисления целевого приводного крутящего момента двигателя добавляет дополнительную регенеративную силу к базовой регенеративной силе после ограничения для вычисления регенеративной силы после ограничения. Дополнительная регенеративная сила представляет собой мощность, необходимую для работы вспомогательного механизма и т.п., и силу, соответствующую передаче энергии трения от электродвигателя к аккумулятору. Чтобы сделать целевое значение регенеративной силы после ограничения значением в направлении регенерации, блок 205 вычисления целевого приводного крутящего момента двигателя умножает «-1» на целевую регенеративную силу после ограничения и подвергает воздействию значение, полученное умножением, и целевую движущую силу в логику выбора высокого уровня. Кроме того, блок 205 вычисления целевого приводного крутящего момента двигателя преобразует выбранную силу в блоке в целевой приводной крутящий момент двигателя с использованием динамического радиуса ведущих колес 15 и передаточного числа понижающей передачи 132. Блок 205 вычисления целевого крутящего момента двигателя сравнивает целевой крутящий момент двигателя с нижним пределом крутящего момента двигателя. Когда целевой крутящий момент двигателя меньше, чем нижний предел крутящего момента двигателя, блок 205 вычисления целевого крутящего момента двигателя устанавливает нижний предел крутящего момента двигателя как значение команды Tm крутящего момента двигателя. Кроме того, блок 205 вычисления целевого приводного крутящего момента двигателя сравнивает целевой приводной крутящий момент двигателя с верхним пределом приводного крутящего момента двигателя. Когда целевой крутящий момент двигателя больше, чем верхний предел крутящего момента двигателя, блок 205 вычисления целевого крутящего момента двигателя устанавливает верхний предел крутящего момента двигателя в качестве значения Tm команды приводного крутящего момента. Нижний предел приводного крутящего момента двигателя и верхний предел приводного крутящего момента двигателя определяются в соответствии с требованиями по защите компонентов транспортного средства и т.п.
[0057]
Далее будет описана последовательность процессов управления, выполняемых контроллером 20 транспортного средства. Фиг. 12А и Фиг. 12B являются блок-схемами, иллюстрирующими содержание обработки, выполняемой контроллером 20 транспортного средства. Процессы в блок-схеме последовательности операций на Фиг. 10 повторяются с определенными интервалами времени, например, 10 мсек.
[0058]
На этапе S1 соответствующие сигналы положения педали акселератора от датчика 25 акселератора, скорости транспортного средства от датчика 26 скорости транспортного средства и режима движения от датчика 27 S/M и допустимой входной мощности аккумулятора от контроллера 23 аккумулятора вводятся в блок 201 вычисления целевой движущей силы. На этапе S2 блок 201 вычисления целевой движущей силы выполняет процессы, показанные на Фиг. 3, чтобы получить целевую движущую силу Fd.
[0059]
На этапе S3 блок 202 вычисления целевой потребляемой мощности выполняет процессы, показанные на Фиг. 4, для вычисления целевой потребляемой мощности Pc. На этапе S4 блок 203 вычисления целевой достигаемой скорости вращения двигателя выполняет процессы, показанные на Фиг. 5, для вычисления целевой достигаемой скорости Nt вращения двигателя. На этапе S5 блок 202 вычисления целевой потребляемой мощности выполняет процессы, показанные на Фиг. 4, для вычисления запроса потребления мощности.
[0060]
На этапе S6 делается определение относительно того, существует или нет запрос потребления мощности. Когда определено, что имеется запрос потребления мощности, процесс переходит к этапу S7, в то время как когда определяется, что запрос потребления мощности отсутствует, процесс переходит к этапу S22. На этапе S7 блок 2041 вычисления для требуемого дополнительного замедления за счет потребляемой мощности выполняет процессы, проиллюстрированные на Фиг. 7, для вычисления требуемого дополнительного замедления за счет потребляемой мощности. На этапе S8 блок 2042 вычисления целевой скорости вращения двигателя вычисляет разность между целевой достигаемой скоростью Nt вращения двигателя, вычисленной с помощью процессов вычисления на этапе S3, и предыдущим значением целевой достигаемой скорости Nc вращения двигателя. Когда разница больше, чем предварительно определенное значение, процесс переходит к этапу S9, тогда как, когда разница не превышает предварительно определенное значение, процесс переходит к этапу S10.
[0061]
На этапе S9 требуемое дополнительное замедление за счет потребления мощности DR вводится в блок 2042 вычисления целевой скорости вращения двигателя, который обращается к первой взаимосвязи, проиллюстрированной на Фиг. 8, для вычисления базовой целевой скорости увеличения скорости вращения двигателя NRBu. На этапе S10 на основе разности (Nt-Nc) между целевой достигаемой скоростью вращения двигателя и фактической скоростью вращения двигателя блок 2042 вычисления целевой скорости вращения двигателя обращается ко второй взаимосвязи, проиллюстрированной на Фиг. 8, чтобы вычислить скорость увеличения скорости вращения двигателя для воспроизведения ощущения повышения или понижения звука двигателя NRGu. На этапе S11 блок 2042 вычисления целевой скорости вращения двигателя выполняет процессы, показанные на Фиг. 8, чтобы вычислить скорость увеличения скорости вращения двигателя во время запроса потребления мощности NRDu. На этапе S12 скорость транспортного средства вводится в блок 2042 вычисления целевой скорости вращения двигателя, который обращается к третьей взаимосвязи, показанной на Фиг. 8, чтобы вычислить скорость увеличения скорости вращения двигателя во время работы без водителя NRNu. На этапе S13 блок 2042 вычисления целевой скорости вращения двигателя выполняет процессы, показанные на Фиг. 8, для вычисления целевой скорости вращения двигателя NBu.
[0062]
На этапе S14 на основе состояния флага, указывающего, что сделано определение действия водителя/акселератора, когда запрашивается потребление мощности, блок 2043 вычисления целевой скорости вращения двигателя определяет, существует или нет операция воздействия на акселератор водителем во время уменьшения скорости вращения двигателя. Когда выполняется определение того, что имеется операция воздействия на акселератор, процесс переходит к этапу S15, в то время как, когда определяется, что операция воздействия на акселератор отсутствует, процесс переходит к этапу S18.
[0063]
На этапе S15 блок 2043 вычисления целевой скорости вращения двигателя обращается к четвертой взаимосвязи, показанной на Фиг. 9, с целевой потребляемой мощностью Pc в качестве входных данных для вычисления базовой целевой скорости уменьшения скорости вращения двигателя NRBd. На этапе S16 блок 2043 вычисления целевой скорости вращения двигателя обращается к пятой взаимосвязи, показанной на Фиг. 8, для вычисления усиления, соответствующего величине изменения положения педали акселератора.
[0064]
На этапе S17 блок 2043 вычисления целевой скорости вращения двигателя выполняет процессы, показанные на Фиг. 9, чтобы вычислить целевую скорость уменьшения скорости вращения двигателя во время определения действия водителя. На этапе S18 блок 2043 вычисления целевой скорости вращения двигателя обращается к шестой взаимосвязи, показанной на Фиг. 9, со скоростью транспортного средства в качестве входных данных для вычисления целевой скорости уменьшения скорости вращения двигателя во время работы без водителя.
[0065]
На этапе S19 блок 2043 вычисления целевой скорости вращения двигателя выполняет процессы, показанные на Фиг. 9, чтобы вычислить целевую скорость уменьшения скорости вращения двигателя во время запроса потребления мощности. На этапе S20 блок 2043 вычисления целевой скорости вращения двигателя выполняет процессы, показанные на Фиг. 9, чтобы вычислить целевую скорость уменьшения скорости вращения двигателя для подавления внезапного изменения скорости вращения двигателя NRkd. На этапе S21 блок 2043 вычисления целевой скорости вращения двигателя выполняет процессы, показанные на Фиг. 9, чтобы вычислить целевую скорость вращения двигателя NBd.
[0066]
На этапе S22 блок 2044 вычисления значения команды скорости вращения электродвигателя генератора выполняет процессы, проиллюстрированные на Фиг. 10, для вычисления конечной целевой скорости вращения двигателя Nc. На этапе S23 блок 205 вычисления целевого приводного крутящего момента двигателя выполняет процессы, показанные на Фиг. 11, для вычисления значения команды приводного крутящего момента двигателя Tm.
[0067]
Далее будет описано поведение различных параметров, когда гибридное транспортное средство 1 применяется к некоторым типичным сценам. Каждая из Фиг. 13 и Фиг. 14 представляет собой набор временных диаграмм, когда скорость вращения двигателя 11 увеличивается в соответствии с увеличением требуемого дополнительного замедления за счет потребления мощности при выполнении управления режимом электродвигателя. Каждая из Фиг. 15 - Фиг. 17 представляет собой набор временных диаграмм, когда требуемое дополнительное замедление за счет потребления мощности уменьшается, и двигатель 11 приводится в действие генератором 12 при выполнении управления режимом электродвигателя.
[0068]
Фиг. 13 иллюстрирует состояние или сцену, в которой водитель ведет гибридное транспортное средство. Как показано на графике величины/времени нажатия педали акселератора на Фиг. 13(b), водитель нажимает педаль акселератора с постоянной величиной в течение времени от t0 до t1 и отпускает педаль акселератора после времени t1.
[0069]
Как показано на графике скорости/времени транспортного средства на Фиг. 13(a), операция воздействия на акселератор водителем позволяет транспортному средству двигаться с постоянной скоростью в течение времени от t0 до t1 и затем постепенно замедляться после времени t1. График скорости/времени транспортного средства на Фиг. 13(a) иллюстрируется разными толщинами линий, когда скорость транспортного средства является высокой и низкой, а толщина линий изменения параметров на каждом графике на Фиг. 13(d) - 13(f) проиллюстрированы так, чтобы соответствовать соответствующим скоростям транспортного средства (высокая/низкая). График мощности/времени по Фиг. 13(c) иллюстрирует требуемую регенеративную мощность, вычисленную блоком 202 вычисления целевой потребляемой мощности по Фиг. 2, допустимую входную мощность аккумулятора, вычисленную контроллером 23 аккумулятора, и целевую потребляемую мощность Pc, вычисленную блоком 202 вычисления целевой потребляемой мощности по Фиг. 2. Требуемое дополнительное замедление из-за графика энергопотребления/времени на Фиг. 13(d) иллюстрирует требуемое дополнительное замедление за счет потребляемой мощности DR, вычисленной блоком 2041 вычисления для требуемого дополнительного замедления за счет потребляемой мощности по Фиг. 6. График скорости вращения/времени вращения двигателя на Фиг. 13(e) иллюстрирует целевую скорость вращения двигателя (конечную целевую скорость вращения Nc двигателя) с учетом скорости изменения, вычисленную блоком 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения по Фиг. 2. График движущей силы/времени на Фиг. 13(f) иллюстрирует движущую силу электродвигателя 13.
[0070]
Как показано на Фиг. 13(c), когда требуемая водителем движущая сила (соответствующая целевой движущей силе) одинакова, требуемая регенеративная мощность в случае высокой скорости транспортного средства выше, чем в случае низкой скорости транспортного средства. Целевая потребляемая мощность соответствует разнице между требуемой регенеративной мощностью и допустимой входной мощностью аккумулятора. Когда допустимая входная мощность для аккумулятора одинакова, целевая скорость вращения в случае высокой скорости транспортного средства выше, чем в случае низкой скорости транспортного средства.
[0071]
Как показано на Фиг. 13(d), требуемое дополнительное замедление за счет потребления мощности в случае высокой скорости транспортного средства такое же, как в случае низкой скорости транспортного средства. То есть, когда скорость транспортного средства отличается и требуемое дополнительное замедление за счет потребляемой мощности является одинаковым, целевая потребляемая мощность Pc уменьшается с уменьшением скорости транспортного средства. Как показано на Фиг. 13(e), скорость вращения двигателя увеличивается с момента времени t1, и начальная скорость изменения скорости вращения двигателя в случае высокой скорости транспортного средства является такой же, как и в случае низкой скорости транспортного средства. Когда скорость транспортного средства низкая, после времени t2 скорость вращения двигателя увеличивается с меньшей скоростью изменения, чем в течение времени от t1 до t2. С другой стороны, когда скорость транспортного средства является высокой, скорость вращения двигателя увеличивается с высокой скоростью изменения в течение времени от t1 до t3 и после времени t3 увеличивается с меньшей скоростью изменения, чем в течение времени от t1 до t3. Как показано на Фиг. 13(f), движущая сила в направлении регенерации начинает увеличиваться со времени t1. Движущая сила в направлении регенерации в случае низкой скорости транспортного средства такая же, как в случае высокой скорости транспортного средства.
[0072]
Как показано на Фиг. 13, когда требуемое дополнительное замедление за счет потребления мощности является одинаковым независимо от скорости транспортного средства, малое тормозное усилие не вызывает неприятных ощущений, и может быть повышена тишина, поскольку скорость вращения двигателя уменьшается с уменьшением скорости транспортного средства.
[0073]
Кроме того, в течение периода нарастания (соответствующего времени от t1 до t2 или времени от t1 до t3), в котором скорость вращения двигателя увеличивается, скорость изменения скорости вращения двигателя является высокой, и поэтому может быть дано ощущение замедления при переходном процессе в ответ на запрос на замедление путем регенерации от водителя. Кроме того, скорость вращения двигателя после истечения периода нарастания изменяется с меньшей скоростью, чем во время периода нарастания. Это может дать водителю ощущение замедления.
[0074]
Фиг. 14 иллюстрирует состояние или сцену, в которой водитель ведет гибридное транспортное средство. Как показано на графике величины/времени нажатия педали акселератора на Фиг. 14(b), водитель нажимает педаль акселератора с постоянной величиной в течение времени от t0 до t1 и отпускает педаль акселератора после времени t1.
[0075]
Как показано на графике скорости/времени транспортного средства на Фиг. 14(a), операция воздействия на акселератор водителем позволяет транспортному средству двигаться с постоянной скоростью в течение времени от t0 до t1 и затем постепенно замедляться после времени t1. График скорости/времени транспортного средства на Фиг. 14(a) иллюстрируется разными толщинами линий, когда скорость транспортного средства является высокой и низкой, а толщина линий изменения параметров на каждом графике на Фиг. 14(d) - (f) проиллюстрированы так, чтобы соответствовать соответствующим скоростям транспортного средства (высокая/низкая). Параметры, показанные на графиках Фиг. 14(a) - 14(f) те же, что показаны на графиках Фиг. 13(а) - 13(f).
[0076]
Как показано на Фиг. 14(c), требуемая регенеративная мощность в случае высокой скорости транспортного средства является такой же, как в случае низкой скорости транспортного средства, и целевая потребляемая мощность также является такой же. Как показано на Фиг. 14(d), требуемое дополнительное замедление за счет потребления мощности в случае высокой скорости транспортного средства ниже, чем в случае низкой скорости транспортного средства.
[0077]
Как показано на Фиг. 14(e), целевая достигаемая скорость вращения двигателя в случае высокой скорости транспортного средства является такой же, как в случае низкой скорости транспортного средства. Скорость вращения двигателя увеличивается с момента времени t1. После времени t2 скорость вращения двигателя, когда скорость транспортного средства является низкой, увеличивается с меньшей скоростью изменения, чем в течение времени от t1 до t2. С другой стороны, когда скорость транспортного средства является высокой, скорость вращения двигателя увеличивается с высокой скоростью изменения в течение времени от t1 до t3 и после времени t3 увеличивается с меньшей скоростью изменения, чем в течение времени от t1 до t3. Как показано на Фиг. 14(f), движущая сила в направлении регенерации начинает уменьшаться со времени t1. Сравнивая случай низкой скорости транспортного средства со случаем высокой скорости транспортного средства, движущая сила в направлении регенерации в случае низкой скорости транспортного средства больше, чем в случае высокой скорости транспортного средства. То есть, когда скорость транспортного средства отличается и требуемая регенеративная мощность одинакова, движущая сила увеличивается с уменьшением скорости транспортного средства.
[0078]
Фиг. 15 иллюстрирует состояние или сцену, в которой водитель ведет гибридное транспортное средство. Как показано на графике величины/времени нажатия педали акселератора на Фиг. 15(b), водитель нажимает педаль акселератора с постоянной величиной в течение времени от t0 до t1 и отпускает педаль акселератора после времени t1.
[0079]
График SOC/времени по Фиг. 15(a) иллюстрируется разными толщинами линий, когда SOC является высоким и низким, а толщина линий изменения параметров на каждом графике на Фиг. 15(a) и 15(c) - 15(e) проиллюстрированы так, чтобы соответствовать соответствующим SOC (высокий/низкий). Параметры, показанные на графиках Фиг. 15(c) - 15 (f) являются такими же, как те, которые показаны на графиках Фиг. 13(с) - 13(f).
[0080]
Как показано на Фиг. 15(c), допустимая входная мощность аккумулятора в случае высокого SOC меньше, чем в случае низкого SOC, и целевая потребляемая мощность в случае высокого SOC больше, чем в случае низкого SOC. Как показано на Фиг. 15(d), когда SOC является высоким, мощность, с которой аккумулятор 14 может заряжаться, мала; следовательно, потребляемая мощность, приводимая в движение двигателем 11, является большой, и, таким образом, увеличивается требуемое замедление за счет потребления мощности. То есть требуемое дополнительное замедление за счет потребления мощности в случае высокого SOC больше, чем в случае низкого SOC.
[0081]
Как показано на Фиг. 15(e), скорость вращения двигателя увеличивается от t1 и увеличивается с высокой скоростью изменения, а после времени t2 увеличивается с низкой скоростью изменения. В течение времени t1-t2 скорость изменения скорости вращения двигателя увеличивается с увеличением SOC.
[0082]
В течение периода от момента времени, в который скорость вращения двигателя повышается, до момента времени, в который скорость вращения двигателя достигает целевой достигаемой скорости вращения двигателя, скорость изменения скорости вращения двигателя в течение времени t1-t2 (соответствует базовой целевой скорости увеличения скорости вращения двигателя) выше, чем в течение времени t2-t3 (соответствует скорости увеличения скорости вращения двигателя для воспроизведения ощущения повышения или понижения звука двигателя).
[0083]
Фиг. 16 иллюстрирует состояние или сцену, в которой водитель ведет гибридное транспортное средство. Как показано на графике величины/времени нажатия педали акселератора на Фиг. 16(a), водитель не нажимает педаль акселератора в течение времени от t0 до t1, затем постепенно нажимает педаль акселератора после времени t1 и дополнительно нажимает педаль акселератора после времени t5.
[0084]
В соответствии с операцией воздействия на акселератор водителем, как показано на графике величины/времени нажатия педали акселератора на Фиг. 16(a), и величиной изменения в графике положения/времени педали акселератора на Фиг. 16(c), величина нажатия педали акселератора равна нулю в течение времени от t0 до t1, величина изменения положения педали акселератора является большой в течение времени от t1 до t5, так что величина нажатия педали акселератора увеличивается с заданной скоростью увеличения, и величина изменения в положении педали акселератора больше после времени t5, так что величина нажатия педали акселератора увеличивается с более высокой скоростью увеличения.
[0085]
График целевой потребляемой мощности/времени на Фиг. 16(b) иллюстрирует целевую потребляемую мощность Pc, вычисленную блоком 202 вычисления целевой потребляемой мощности по Фиг. 2. График скорости вращения/времени вращения двигателя на Фиг. 16(f) иллюстрирует целевую скорость вращения двигателя (конечную целевую скорость вращения Nc двигателя) с учетом скорости изменения, вычисленную блоком 204 вычисления целевой скорости вращения двигателя с учетом скорости изменения по Фиг. 2.
[0086]
Как показано на Фиг. 16(c), когда величина изменения в положении педали акселератора становится больше, чем порог определения действия водителя/акселератора в момент времени t1, флаг, указывающий результат определения операции воздействия на акселератор водителем, устанавливается в установленное состояние, как показано в процессах на Фиг. 9. В момент времени t1 целевая потребляемая мощность в случае высокой скорости транспортного средства превышает целевое пороговое значение потребляемой мощности Pth. Целевой порог потребляемой мощности Pth соответствует целевой потребляемой мощности в точке сгиба графика на четвертой взаимосвязи блоков управления по Фиг. 9. Когда целевая потребляемая мощность выше, чем целевое пороговое значение потребляемой мощности Pth, скорость уменьшения скорости вращения двигателя является постоянным значением (ноль) в процессах, проиллюстрированных на Фиг. 9. Соответственно, как показано на Фиг. 16(e), когда скорость транспортного средства является низкой, скорость уменьшения скорости вращения двигателя равна нулю в течение времени t1-t2. Когда скорость транспортного средства высока, скорость уменьшения скорости вращения двигателя равна нулю в течение времени t1-t3.
[0087]
В момент времени t2 целевая потребляемая мощность в случае низкой скорости транспортного средства становится ниже, чем целевое пороговое значение потребляемой мощности Pth, и, следовательно, скорость уменьшения скорости вращения двигателя больше, чем постоянное значение (ноль) в процессах, проиллюстрированных на Фиг. 9. Как показано на Фиг. 16(e), скорость уменьшения скорости вращения двигателя начинает увеличиваться. Когда скорость транспортного средства высока, целевая потребляемая мощность Pc больше, чем при низкой скорости транспортного средства; следовательно, время, в которое целевая потребляемая мощность становится ниже, чем целевое пороговое значение потребляемой мощности Pth, является более поздним, чем время, когда скорость транспортного средства является низкой. В момент времени t3 целевая потребляемая мощность становится ниже, чем целевое пороговое значение потребляемой мощности Pth, и скорость уменьшения скорости вращения двигателя начинает увеличиваться. Сравнивая случай высокой скорости транспортного средства со случаем низкой скорости транспортного средства в течение времени t2-t4, максимальное значение скорости уменьшения скорости вращения двигателя (достигнутая скорость уменьшения) в случае высокой скорости транспортного средства больше, чем в случае низкой скорости автомобиля.
[0088]
Как показано на Фиг. 16(b), целевая потребляемая мощность становится равной нулю в момент времени t4. Как показано на Фиг. 16(e), скорость вращения двигателя также становится нулевой в момент времени t4. Когда скорость транспортного средства является высокой, скорость вращения двигателя уменьшается от высокого состояния до нуля в течение времени t3-t4. Когда скорость транспортного средства является низкой, скорость вращения двигателя уменьшается от высокого состояния до нуля в течение времени t2-t4. То есть, в случае низкой скорости транспортного средства, время, пока скорость вращения двигателя не переходит в низкое состояние из высокого состояния, больше, чем в случае высокой скорости транспортного средства.
[0089]
В настоящем варианте осуществления момент снятия ограничения на изменение скорости вращения двигателя устанавливается в соответствии с целевой потребляемой мощностью, но величина нажатия педали акселератора может использоваться в качестве замены целевой потребляемой мощности. В процессах, показанных на Фиг. 4, целевая потребляемая мощность Pc определяется по скорости транспортного средства, и когда допустимая потребляемая мощность аккумулятора фиксирована, целевая потребляемая мощность Pc увеличивается с увеличением скорости транспортного средства. Поэтому, как показано на Фиг. 16(a), целевой порог Pth потребляемой мощности может быть заменен величиной нажатия педали акселератора, соответствующей скорости транспортного средства. Когда скорость транспортного средства является высокой, целевой порог Pth потребляемой мощности заменяется пороговым значением AthH величины нажатия педали акселератора, в то время как, когда скорость транспортного средства является низкой, целевой порог Pth потребляемой мощности заменяется пороговым значением AthL величины нажатия педали акселератора.
[0090]
В случае низкой скорости транспортного средства в сцене движения, показанной на Фиг. 16, когда величина нажатия педали акселератора становится пороговым значением величины нажатия педали акселератора AthL или более, ограничение на изменение скорости вращения двигателя снимается, и скорость уменьшения скорости вращения двигателя увеличивается. В случае высокой скорости транспортного средства, когда величина нажатия педали акселератора становится пороговым значением величины нажатия педали акселератора AthH или более, ограничение на изменение скорости вращения двигателя снимается, и скорость уменьшения скорости вращения двигателя увеличивается. Порог величины нажатия педали акселератора (AthL, AthH) для снятия ограничения на изменение скорости вращения двигателя является более высоким значением, когда скорость уменьшения скорости вращения двигателя увеличивается или когда скорость транспортного средства увеличивается. Посредством этой операции может быть снято ограничение на изменение скорости вращения двигателя при сохранении тишины, поскольку звук двигателя является низким, когда скорость вращения двигателя является низкой.
[0091]
Фиг. 17 иллюстрирует состояние или сцену, в которой водитель ведет гибридное транспортное средство. Как показано на графике величины/времени нажатия педали акселератора на Фиг. 17(a), водитель не нажимает педаль акселератора в течение времени t0-t1, затем постепенно нажимает педаль акселератора после времени t1 и приводит в действие акселератор так, что величина нажатия педали акселератора остается постоянной после времени t3. Параметры, показанные на графиках Фиг. 17(a) - 17(f), являются такими же, как те, которые показаны на графиках Фиг. 16(а) - 16(f).
[0092]
В соответствии с операцией воздействия на акселератор водителем, как показано на графике величины/времени нажатия педали акселератора на Фиг. 17(a), и величиной изменения в графике положения/времени педали акселератора на Фиг. 17(c), величина нажатия педали акселератора равна нулю в течение времени от t0 до t1, величина изменения положения педали акселератора является большой в течение времени от t1 до t3, так что величина нажатия педали акселератора увеличивается с заданной скоростью увеличения, и величина нажатия педали акселератора постоянна после времени t3.
[0093]
Как показано на Фиг. 17(b), целевая потребляемая мощность становится ниже, чем целевое пороговое значение потребляемой мощности Pth в момент времени t2; следовательно, ограничение на изменение скорости вращения двигателя снимается и, как показано на Фиг. 17(f), скорость вращения двигателя начинает уменьшаться. В течение времени t2-t3 требуемое замедление для транспортного средства уменьшается по мере увеличения величины нажатия педали акселератора. В течение времени t2-t3 скорость уменьшения скорости вращения двигателя увеличивается с уменьшением требуемого замедления. В течение времени t2-t3 скорость уменьшения скорости вращения двигателя увеличивается с уменьшением мощности, потребляемой посредством управления режимом электродвигателя (соответствующей целевой потребляемой мощности Pc).
[0094]
Как показано на Фиг. 17(c), величина изменения в положении педали акселератора становится ниже, чем порог определения действия водителя/акселератора, и поэтому флаг, указывающий результат определения операции воздействия на акселератор водителем, переводится в состояние сброса. Как показано на Фиг. 17(b), целевая потребляемая мощность постоянна после времени t3. Как показано на Фиг. 17(e), скорость уменьшения скорости вращения двигателя начинает уменьшаться в момент времени t3, затем плавно уменьшается в течение времени от t3 до t4 и переходит с постоянным значением в течение времени от t4 до t5.
[0095]
Как показано на Фиг. 17(e), скорость уменьшения скорости вращения двигателя начинает уменьшаться в момент времени t3 и плавно уменьшается в течение времени от t3 до t4. Скорость уменьшения скорости вращения двигателя становится постоянной целевой скоростью уменьшения скорости вращения двигателя во время работы без водителя в момент времени t4 и переходит в постоянную скорость уменьшения в течение времени от t4 до t5. Как показано на Фиг. 17(f), скорость вращения двигателя соответствует целевой достигаемой скорости вращения двигателя.
[0096]
Как описано выше, в настоящем варианте осуществления, когда требуемое замедление уменьшается, и при запуске управления режимом электродвигателя запрашивается приведение в движение двигателя генератором, накладывается ограничение на изменение скорости вращения двигателя. Когда скорость вращения двигателя высокая, звук двигателя легко слышен; следовательно, накладывая ограничение на изменение скорости вращения двигателя, можно подавить большое изменение скорости вращения двигателя из-за изменения требуемого замедления. В результате, неприятные ощущения, возникающие у водителя, могут быть смягчены.
[0097]
В настоящем варианте осуществления, когда требуемое замедление уменьшается, запрашивается приведение в действие двигателя генератором, и мощность, потребляемая посредством управления режимом электродвигателя, составляет предварительно определенное значение или более при выполнении управления режимом электродвигателя, скорость вращения двигателя устанавливается на постоянную скорость. Это может облегчить неприятные ощущения водителя.
[0098]
В настоящем варианте осуществления, когда требуемое замедление уменьшается, запрошено приведение в действие двигателя генератором, и мощность, потребляемая посредством управления режимом электродвигателя, меньше, чем предварительно определенное значение при выполнении управления режимом электродвигателя, ограничение на изменение в скорости вращения двигателя снимается. Посредством этой операции, когда мощность, потребляемая посредством управления режимом электродвигателя, превышает предварительно определенное значение, неприятные ощущения, возникающие у водителя, могут быть смягчены, и когда мощность, потребляемая посредством управления режимом электродвигателя, меньше предварительно определенного значения, скорость вращения двигателя может быть уменьшена при подготовке к следующему ускорению. В результате скорость вращения двигателя может быть увеличена во время следующего ускорения, и, следовательно, увеличение скорости вращения двигателя может дать ощущение ускорения водителю. Кроме того, когда потребляемая мощность при управлении режимом электродвигателя меньше предварительно определенного значения, скорость вращения двигателя низкая, и звук двигателя трудно слышать; следовательно, даже когда скорость вращения двигателя изменяется, ощущение дискомфорта, испытываемое водителем, является небольшим.
[0099]
В настоящем варианте осуществления, когда требуемое замедление уменьшается, и управление двигателем посредством генератора запрашивается при выполнении управления режимом электродвигателя, ограничение на изменение скорости вращения двигателя снимается, когда величина нажатия педали акселератора становится больше, чем значение ограничения, и значение ограничения увеличивается при увеличении скорости вращения двигателя. Посредством этой операции, когда скорость вращения двигателя высока, звук двигателя легко слышать, и поэтому неприятное ощущение, испытываемое водителем, можно ослабить, задержав момент снятия ограничения на изменение скорости вращения двигателя.
[0100]
В настоящем варианте осуществления, когда требуемое замедление уменьшается, и управление двигателем посредством генератора запрашивается при выполнении управления режимом электродвигателя, ограничение на изменение скорости вращения двигателя снимается, когда величина нажатия педали акселератора становится больше, чем значение ограничения, и значение ограничения увеличивается с увеличением скорости транспортного средства. При таком движении в соответствии с настоящим вариантом осуществления значение ограничения для снятия ограничения на изменение скорости вращения двигателя устанавливается высоким в соответствии со скоростью транспортного средства, и, следовательно, возможно подавлять изменение скорости вращения двигателя из-за минимальной работы акселератора. С другой стороны, в области движения, в которой скорость транспортного средства является низкой, отклик на действие водителя может быть улучшен.
[0101]
В настоящем варианте осуществления скорость вращения двигателя задается таким образом, что скорость уменьшения скорости вращения двигателя увеличивается, когда потребляемая мощность при вращении двигателя 11 уменьшается. Это может улучшить ощущение ускорения для водителя в ответ на запрос ускорения во время следующего ускорения.
[0102]
В настоящем варианте осуществления скорость вращения двигателя установлена таким образом, что скорость уменьшения скорости вращения двигателя увеличивается, когда потребляемая мощность при вращении двигателя 11 уменьшается. Посредством этой операции может быть получено удовлетворительное ощущение замедления для намерения водителя замедляться.
[0103]
В настоящем варианте осуществления, когда требуемое замедление становится постоянным после того, как требуемое замедление уменьшается при выполнении управления режимом электродвигателя, скорость вращения двигателя такова, что скорость уменьшения скорости вращения двигателя уменьшается с течением времени. Посредством этой операции может быть получено удовлетворительное ощущение замедления для намерения водителя замедляться.
[0104]
В настоящем варианте осуществления гибридное транспортное средство 1 способно устанавливать множество режимов движения, в которых профили целевой движущей силы, которые установлены относительно скорости движения, являются разными. Режимы движения включают в себя первый режим генерации первой движущей силы в направлении регенерации для предварительно определенной величины работы акселератора и второй режим генерации второй движущей силы в направлении регенерации для предварительно определенной величины работы акселератора. Первая движущая сила установлена больше, чем вторая движущая сила. Например, пользователь использует переключатель для переключения режима движения для переключения между первым режимом и вторым режимом. Когда водитель отпускает педаль акселератора во время движения транспортного средства, чтобы войти в так называемый регенеративный режим, замедление при выборе первого режима больше, чем замедление при выборе второго режима. В настоящем варианте осуществления, когда скорость вращения двигателя является высокой в случае, когда запрос ускорения выполняется в состоянии выполнения управления режимом электродвигателя, скорость вращения двигателя уменьшается при высоком замедлении при подготовке к следующему ускорению. Когда выбран первый режим движения, замедление скорости вращения двигателя выше, и, таким образом, водитель может почувствовать ускорение во время следующего ускорения.
[0105]
В настоящем варианте осуществления, в случае, когда установлен первый режим и выполняется управление режимом электродвигателя, когда требуемое замедление уменьшается, запрошено управление двигателем 11 посредством генератора 12, и мощность, потребляемая при вращении двигателя 11, меньше предварительно определенного значения, скорость вращения двигателя задается так, чтобы уменьшаться. Благодаря этой операции водитель может почувствовать ускорение во время следующего ускорения. Выбор между первым режимом и вторым режимом может быть выполнен путем переключения положения переключения. Например, когда положение переключения установлено в положение торможения в состоянии, в котором установлен режим нормального движения, выбирается первый режим, тогда как когда положение переключения устанавливается в положение движения в состоянии, в котором установлен режим нормального движения, выбирается второй режим.
[Описание позиционных обозначений]
[0106]
1 Гибридный автомобиль
11 Двигатель
111 Выходной вал
112 Ускорение
12 Генератор
121 Вращающийся вал
13 Электродвигатель
131 Вращающийся вал
132 Понижающая передача
14 Аккумуляторная батарея
141 Первый инвертор
142 Второй инвертор
15 Ведущее колесо
16 Ведущий мост
17 Дифференциал
171 Входной вал передачи
20 Контроллер
21 Контроллер двигателя
22 Контроллер генератора
23 Контроллер аккумулятора
24 Контроллер электродвигателя
25 Датчик акселератора
26 Датчик скорости транспортного средства
27 Датчик переключения рычага переключения передач/датчик переключения режима движения
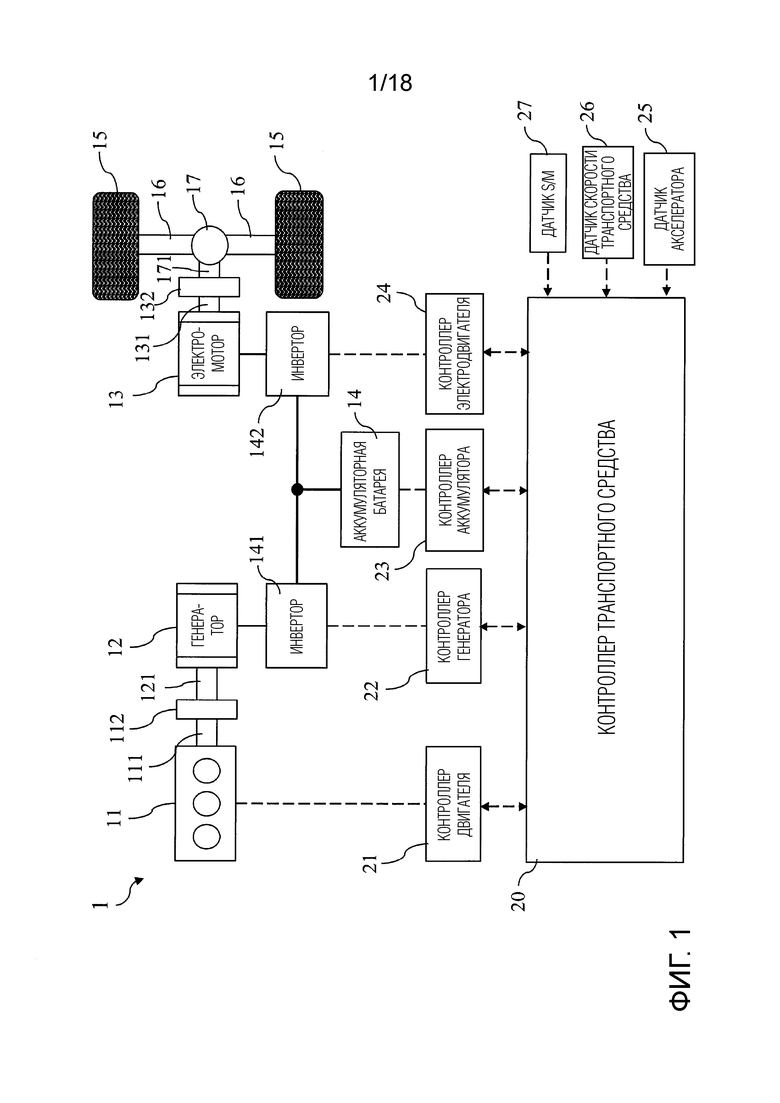

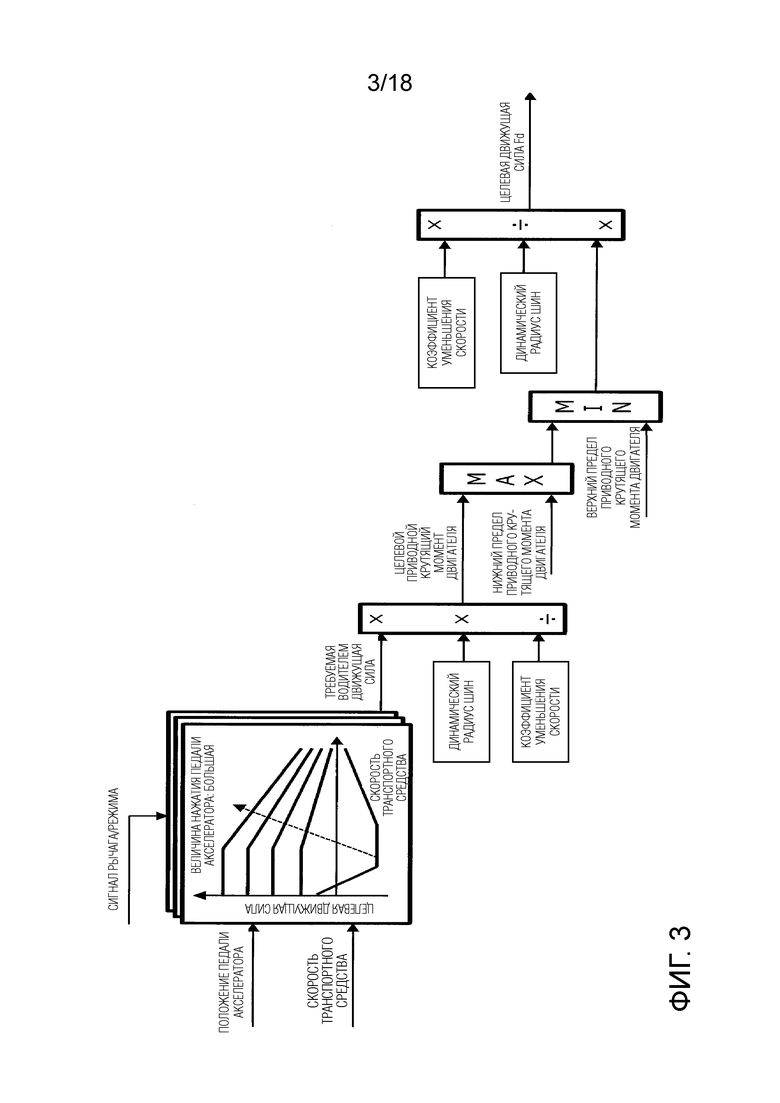



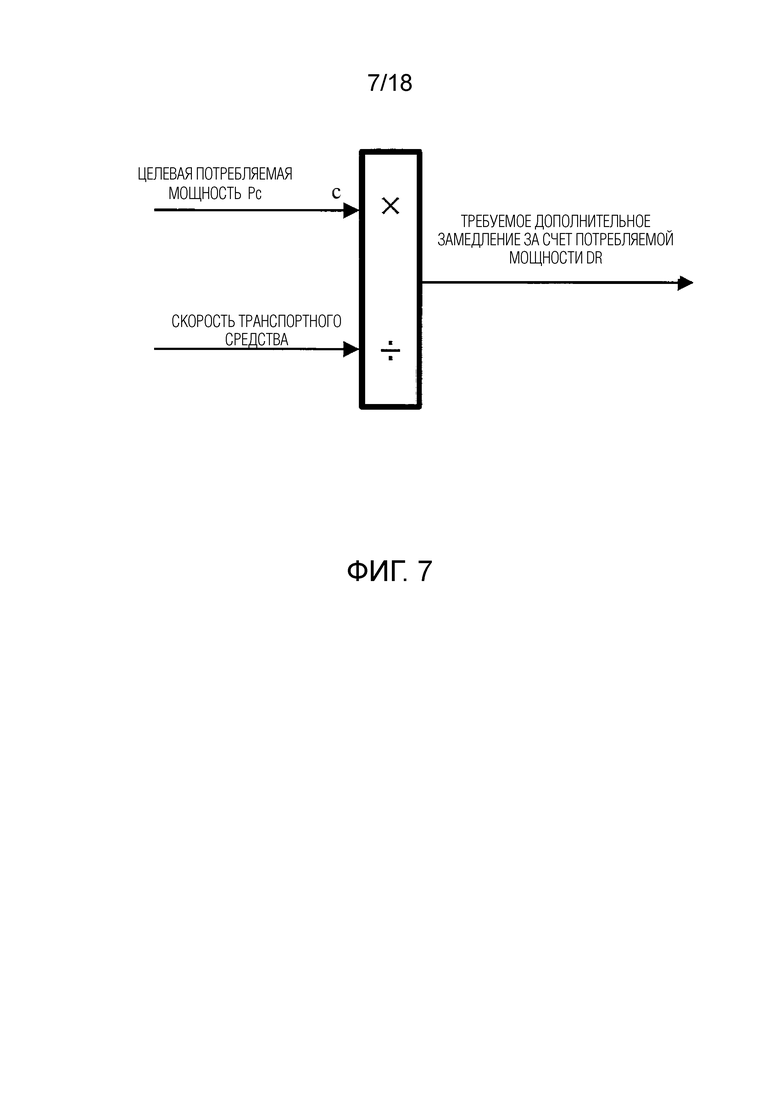
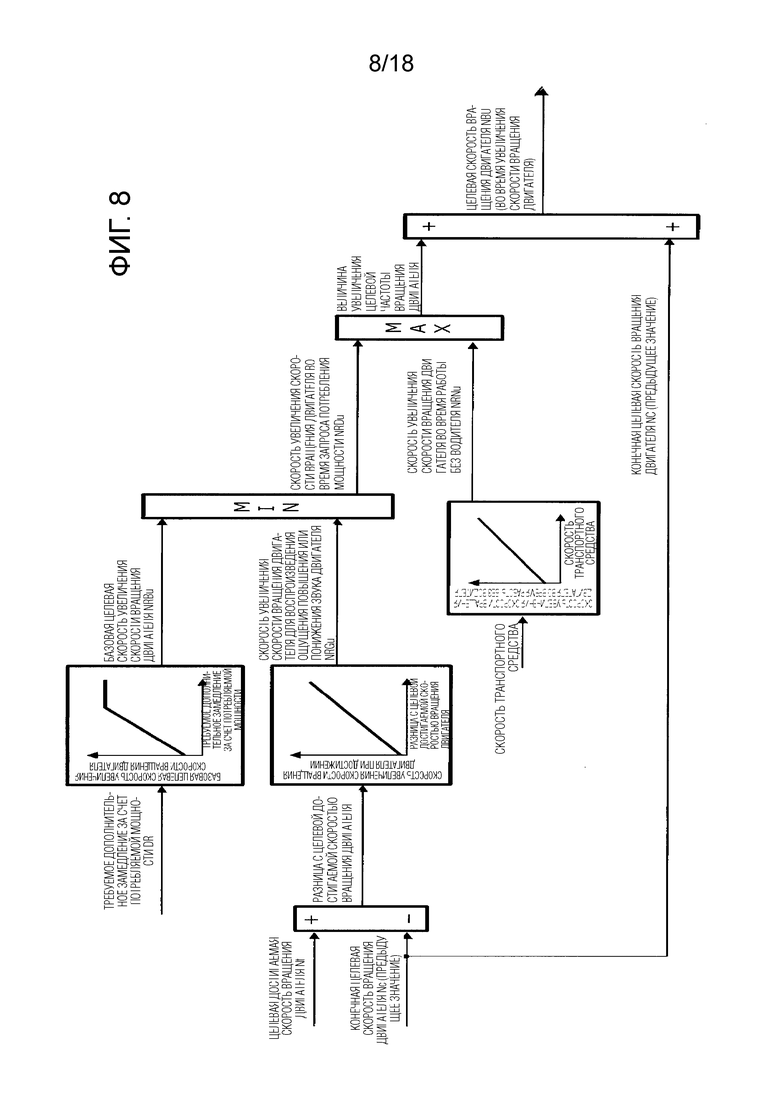










Изобретение относится к гибридным транспортным средствам. В способе управления двигателем гибридного транспортного средства, при приведении электродвигателя в регенеративное состояние, приводят в действие генератор для приведения в действие двигателя в состояние, в котором подача топлива в двигатель прекращается. Тем самым, в соответствии с требуемым замедлением, выполняют управление режимом электродвигателя для потребления выходной мощности электродвигателя. Когда требуемое замедление уменьшается и запрошено приведение в действие двигателя генератором, при выполнении управления режимом электродвигателя, ограничивают скорость уменьшения скорости вращения двигателя значением, которое меньше или равно предварительно определенному значению, с момента времени, в котором изменяется величина нажатия на педаль акселератора. Улучшается комфорт при вождении. 2 н. и 8 з.п. ф-лы, 18 ил.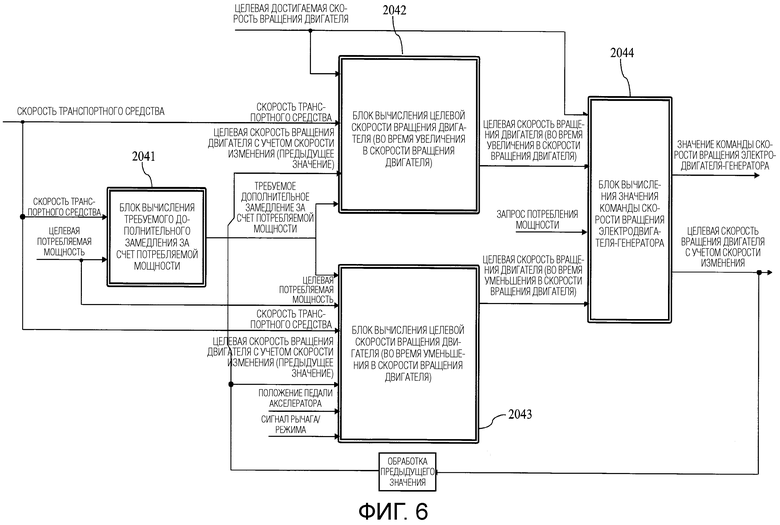
1. Способ управления двигателем гибридного транспортного средства, содержащего электродвигатель, который приводит транспортное средство в движение, генератор, который подает питание на электродвигатель, двигатель, который приводит в движение генератор, и аккумулятор, который подает питание на электродвигатель, причем способ управления содержит этапы, на которых:
при приведении электродвигателя в регенеративное состояние приводят в действие генератор для приведения в действие двигателя в состояние, в котором подача топлива в двигатель прекращается, и, тем самым, в соответствии с требуемым замедлением выполняют управление режимом электродвигателя для потребления выходной мощности электродвигателя; и
когда требуемое замедление уменьшается и запрошено приведение в действие двигателя генератором при выполнении управления режимом электродвигателя, ограничивают скорость уменьшения скорости вращения двигателя значением, которое меньше или равно предварительно определенному значению, с момента времени, в котором изменяется величина нажатия на педаль акселератора.
2. Способ управления двигателем гибридного транспортного средства по п.1, содержащий этап, на котором
когда требуемое замедление уменьшается, запрошено приведение в действие двигателя генератором, и потребляемая мощность при управлении режимом электродвигателя равна предварительно определенному значению или более при выполнении управления режимом электродвигателя, устанавливают скорость вращения двигателя на постоянную скорость.
3. Способ управления двигателем гибридного транспортного средства по п.1 или 2, содержащий этап, на котором
когда требуемое замедление уменьшается, запрошено приведение в действие двигателя генератором, и потребляемая мощность при управлении режимом электродвигателя меньше предварительно определенного значения при выполнении управления режимом электродвигателя, снимают ограничение на изменение скорости вращения двигателя.
4. Способ управления двигателем гибридного транспортного средства по любому из пп.1-3, содержащий этапы, на которых:
когда требуемое замедление уменьшается и запрошено приведение в действие двигателя генератором при выполнении управления режимом электродвигателя, снимают ограничение на изменение скорости вращения двигателя, когда величина нажатия педали акселератора становится больше значения ограничения; и
увеличивают значение ограничения по мере увеличения скорости вращения двигателя.
5. Способ управления двигателем гибридного транспортного средства по любому из пп.1-3, содержащий этапы, на которых:
когда требуемое замедление уменьшается и запрошено приведение в действие двигателя генератором при выполнении управления режимом электродвигателя, снимают ограничение на изменение скорости вращения двигателя, когда величина нажатия педали акселератора становится больше значения ограничения; и
увеличивают значение ограничения по мере увеличения скорости транспортного средства.
6. Способ управления двигателем гибридного транспортного средства по п.3, содержащий этап, на котором
устанавливают скорость вращения двигателя так, чтобы скорость уменьшения скорости вращения двигателя увеличивалась по мере того, как потребляемая мощность при вращении двигателя уменьшается.
7. Способ управления двигателем гибридного транспортного средства по любому из пп.1-5, содержащий этап, на котором
когда требуемое замедление становится постоянным после того, как требуемое замедление уменьшается при выполнении управления режимом электродвигателя, устанавливают скорость вращения двигателя таким образом, чтобы скорость уменьшения скорости вращения двигателя уменьшалась с течением времени.
8. Способ управления двигателем гибридного транспортного средства по любому из пп.1-6, в котором
транспортное средство способно устанавливать множество режимов движения, в которых профили целевой движущей силы, которые задаются относительно скорости движения, различны,
режимы движения включают в себя первый режим генерации первой движущей силы в направлении регенерации для предварительно определенной величины работы акселератора и второй режим генерации второй движущей силы в направлении регенерации для предварительно определенной величины работы акселератора, и
первая движущая сила больше, чем вторая движущая сила.
9. Способ управления двигателем гибридного транспортного средства по п.8, в котором
в случае, когда установлен первый режим и выполняется управление режимом электродвигателя, когда требуемое замедление уменьшается, запрошено приведение в действие двигателя генератором, и потребляемая мощность при вращении двигателя меньше предварительно определенного значения, скорость вращения двигателя устанавливают так, чтобы она уменьшалась.
10. Устройство управления двигателем гибридного транспортного средства, содержащего электродвигатель, который приводит транспортное средство в движение, генератор, который подает питание на электродвигатель, двигатель, который приводит в движение генератор, и аккумулятор, который подает питание на электродвигатель, причем устройство управления содержит:
детектор, сконфигурированный для обнаружения требуемого замедления для электродвигателя; и
контроллер, сконфигурированный с возможностью:
при переводе электродвигателя в регенеративное состояние приводить в действие генератор, чтобы приводить в действие двигатель в состояние, в котором подача топлива в двигатель прекращается, и, тем самым, в соответствии с требуемым замедлением выполнять управление режимом электродвигателя для потребления выходной мощности электродвигателя; и
когда требуемое замедление уменьшается и запрошено приведение в действие двигателя генератором при выполнении управления режимом электродвигателя, ограничивать скорость уменьшения скорости вращения двигателя значением, которое меньше или равно предварительно определенному значению, с момента времени, в котором изменяется величина нажатия на педаль акселератора.
| US 2017066434 A1, 09.03.2017 | |||
| JP 2012228902 A, 22.11.2012 | |||
| US 2005189894 A1, 01.09.2005 | |||
| US 2001020554 A1, 13.09.2001. |

