Предлагаемое изобретение относится к аппаратам для проведения массообменных процессов в гетерогенных системах жидкость - твердые частицы и жидкость - жидкость (например, растворение, дегидратация, эмульгирование, экстрагирование), в том числе для процессов, в которых твердые частицы склонны к образованию больших труднорастворимых кусков, например, при абсорбции атмосферной влаги либо при контакте твердой фазы с жидкостью, а после растворения твердой фазы продолжается процесс взаимодействия между тяжелым концентрированным раствором и непрореагировавшей легкой жидкостью, либо при суспендировании полидисперсной смеси частиц, образующих плотный осадок, в том числе гелеобразный, и может быть использовано в химической, нефтехимической, фармацевтической, пищевой, биотехнологической и других отраслях промышленности.
Известен пульсационный аппарат (МПК5 B01F 11/00, пат. РФ №2004316, 1993 г.), содержащий вертикальный корпус с размещенной в нем центральной трубой с открытым нижним концом, к верхнему концу которой присоединен источник пульсаций в виде штока с подпружиненной тарелкой, снабженный регулятором давления, динамическим компенсатором и упругими опорами, при этом центральная труба в верхней части заглушена и подсоединена к регулятору давления, а в центральной трубе выполнены переточные патрубки коноидальной формы. За счет нелинейности сопротивлений переточных патрубков в аппарате возникает циркуляционное течение, способствующее интенсификации массопереноса. Кроме того, массоперенос интенсифицируется за счет резонансных колебаний жидкости.
Во многих процессах (например, при растворении тяжелых частиц, либо при растворении частиц щелочи, которые быстро оплавляются, образуя крупные агрегаты частиц, покрытые труднопроницаемой коркой, погруженные в вязкую гелеобразную массу) это служит серьезным барьером на пути к повышению скорости массопереноса. Кроме того, в процессах, связанных с необходимостью эмульгирования (например, при жидкостной экстракции, при дегидратации жидкости концентрированным раствором щелочи), сильно сказывается неравномерность распределения вводимой в аппарат энергии, в результате чего удовлетворительное эмульгирование происходит только у нижнего среза трубы, а в целом эффективность известного аппарата недостаточно высокая.
К недостатку известного аппарата относится также отсутствие возможности увеличения амплитуды резонансных колебаний, что существенно ограничивает его возможности по интенсификации процессов перемешивания и растворения.
Известен пульсационный аппарат (МПК5 B01F 11/00, пат. РФ №2033855, 1995 г.), содержащий емкость с коническим рассекателем на днище, центральную трубу с открытым нижним концом с образованием зазора с днищем, герметизированную в верхней части и снабженной побудителем колебаний, соединенным с генератором колебаний, и газонаполненными упругими камерами в центральной трубе и кольцевой камере, побудитель колебаний установлен в верхней части центральной трубы при отношении величины зазора между ней и днищем к ее диаметру выбрано в диапазоне 0,3-0,65. Благодаря заявленным в изобретении параметрам при его использовании в резонансном режиме пульсаций достигается упрощение конструкции и снижение энергетических затрат.
Недостатком известного аппарата является наличие единственного протока через нижний конец центральной трубы, расположенный достаточно близко к дну аппарата. При заполнении аппарата твердой фазой труба заваливается слоем частиц, и пульсации жидкости через плотный слой в результате ее фильтрации становятся практически малозаметными, а при работе с веществами, склонными к гелеобразованию и затвердеванию, выход жидкости из трубы полностью блокируется. В итоге возможности резонансного режима колебаний остаются не реализованными, и процессы растворения, суспендирования и эмульгирования определяются только молекулярной диффузией, а почти вся энергия привода расходуется на увеличение энтропии.
Кроме того, в известном аппарате не предусмотрена возможность интенсификации процессов перемешивания и растворения за счет увеличения амплитуды резонансных колебаний, а чрезмерно большой объем упругого элемента в центральной трубе обуславливает его низкую жесткость, что в значительной степени демпфирует колебания рабочей среды в аппарате.
Наиболее близким к заявляемому является пульсационный аппарат (МПК5 B01F 11/00, пат. РФ №2497579, 2012 г.), содержащий вертикальный корпус с размещенной в нем трубой с образованием зазора с днищем, к верхнему концу которой присоединен источник пневматических пульсаций, упругими элементами в центральной трубе и кольцевой камере, согласно изобретению, нижняя часть трубы закрыта крышкой, в крышке и в погруженной в жидкость части трубы равномерно по их поверхностям установлены патрубки, при этом оси патрубков, установленных на крышке, расположены нормально к ее поверхности, а оси патрубков, установленных на трубе, расположены горизонтально либо опущены вниз под углом от 0° до 70°, причем отношение величины зазора между трубой и днищем к ее диаметру выполнено в диапазоне 0,5-2,0. В известном изобретении достигается равномерное распределение энергии пульсаций по объему аппарата, за счет создания высоких значений относительной скорости фаз, тонкого эмульгирования одной жидкой фазы в другой и дозированного ввода энергии в гетерогенную систему с заданной интенсивностью.
Способ управления пульсационным аппаратом в известном устройстве заключается в создании колебаний гетерогенной системы в аппарате посредством генерирования механических колебаний источником пневматических пульсаций и их передаче через газ в газонаполненной упругой камере.
Вместе с тем, при проведении процессов с твердыми веществами, склонными к образованию больших труднорастворимых кусков либо про формировании на их поверхности плотной корки, например, в результате гидратации гранулированной щелочи, при растворении полидисперсных материалов высокой плотности, образующих плотный непроницаемый осадок, при большом соотношении массовых долей твердой и жидкой фаз в аппарате, выполненном по известному изобретению, происходит забивание нижних рядов сопел, и струи жидкости из них не способны пробиться через плотный слой твердой фазы. Это связано как с особенностями расположения сопел по отношению к слою твердых частиц, так и с невозможностью интенсифицировать процесс резонансных колебаний. В результате забивания нижних сопел работают только несколько верхних рядов сопел, оказавшихся выше уровня твердого осадка, но в силу того, что струи не направлены непосредственно на слой твердых частиц, растворение происходит значительно медленней. Из-за того, что большая часть сопел оказывается недоступной для движения жидкости, в два раза и более снижается общая площадь сечения открытых сопел (по сравнению с площадью всех сопел), в итоге резко возрастает гидравлическое сопротивление открытых сопел, и скорость пульсаций в них снижается настолько, что затухание в колебательной системе приближается к критическому, выше которого резонансное увеличение амплитуды колебаний не проявляется. Это также приводит к ухудшению условий суспендирования (взвешивания) частиц, их растворения и эмульгирования.
Кроме того, в известном изобретении не предусмотрена возможность увеличения амплитуды резонансных колебаний, а объем газонаполненной упругой камеры в центральной трубе в значительной степени демпфирует колебания за счет своей чрезмерно низкой жесткости. Низкая жесткость упругого элемента обусловлена неоправданно большим объемом упругого элемента в центральной трубе, в частности, объемом сильфонной камеры. Не предусмотрена также возможность управления объемом газонаполненной упругой камеры на основании информации об интенсивности колебаний гетерогенной системы в аппарате.
Задача предлагаемого изобретения - повышение эффективности работы аппарата, улучшение условий перемешивания и ускорение процессов растворения, в том числе больших труднорастворимых кусков твердой фазы, а также суспендирования плотных слоев твердых частиц за счет тонкого «эмульгирования» одной жидкой фазы (высококонцентрированного раствора) в другой (в низкоконцентрированном растворе) посредством увеличения амплитуды резонансных колебаний суспензии в аппарате при заданной амплитуде колебаний приводного рабочего органа, а также упрощение условий управления процессом резонансных колебаний в аппарате за счет введения дополнительной управляющей переменной.
Поставленная задача достигается тем, что в пульсационном аппарате для проведения массообменных процессов в гетерогенных системах жидкость - твердые частицы и жидкость - жидкость, содержащий вертикальный корпус с размещенной в нем пульсационной трубой с образованием зазора с днищем, к верхнему концу которой посредством пульсопровода присоединен источник пневматических пульсаций, выполненный в виде сильфонной камеры, одна из стенок которой выполнена подвижной и соединена с генератором механических колебаний, при этом аппарат содержит газонаполненные упругие камеры, соединенные с пульсационной трубой и с кольцевым пространством вокруг нее, согласно изобретению, внутри газонаполненной упругой камеры, соединенной с пульсационной трубой, установлена вставка с непроницаемыми стенками, габариты которой не препятствуют перемещению подвижной стенки сильфонной камеры и колебаниям газа в ней.
Поставленная задача достигается также тем, что в пульсационном аппарате вставка выполнена в виде барабана, представляющего собой цилиндр с поршнем, выполненного с возможностью перемещения относительно цилиндра при подаче управляющего сигнала.
Поставленная задача достигается также тем, что способ управления пульсационным аппаратом заключается в создании колебаний гетерогенной системы в аппарате посредством генерирования механических колебаний источником пневматических пульсаций и их передаче через газ в газонаполненной упругой камере, соединенной с пульсационной трубой, причем, согласно изобретению, величину объема вставки устанавливают такой, чтобы обеспечить максимальную амплитуду колебаний гетерогенной системы в аппарате.
Техническим результатом является повышение эффективности работы аппарата, улучшение условий перемешивания и ускорение процессов растворения, в том числе больших труднорастворимых кусков твердой фазы, а также суспендирования плотных слоев твердых частиц за счет увеличения амплитуды резонансных колебаний суспензии в аппарате при заданной амплитуде колебаний приводного рабочего органа, а также упрощение условий управления процессом резонансных колебаний в аппарате за счет введения дополнительной управляющей переменной - объема упругой камеры в центральной трубе. Этот результат достигается за счет применения в упругой камере вставки с непроницаемыми стенками, объем которой может регулироваться автоматической системой управления или оператором дистанционно. При этом при заданной амплитуде пульсаций приводного рабочего органа (например, штока генератора пульсаций) достигается увеличение амплитуды колебаний жидкости в аппарате, приводящее к ускорению процессов перемешивания и растворения.
Заявляемое техническое решение является новым, обладает изобретательским уровнем и промышленно применимо.
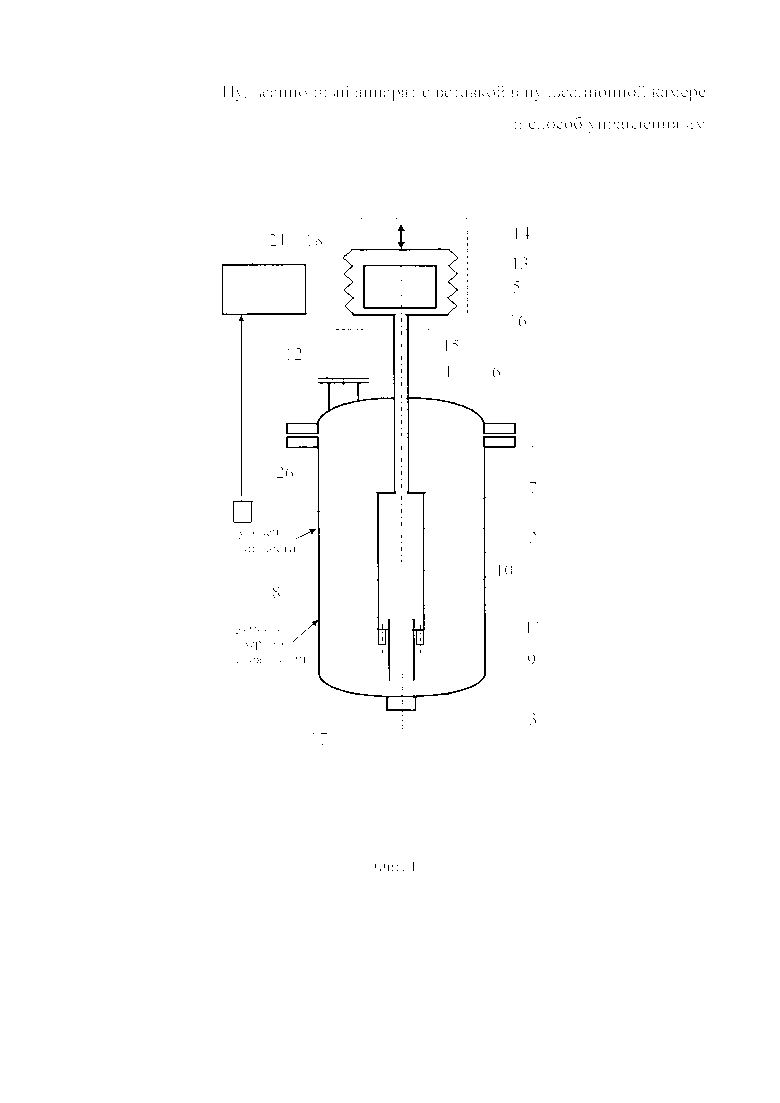
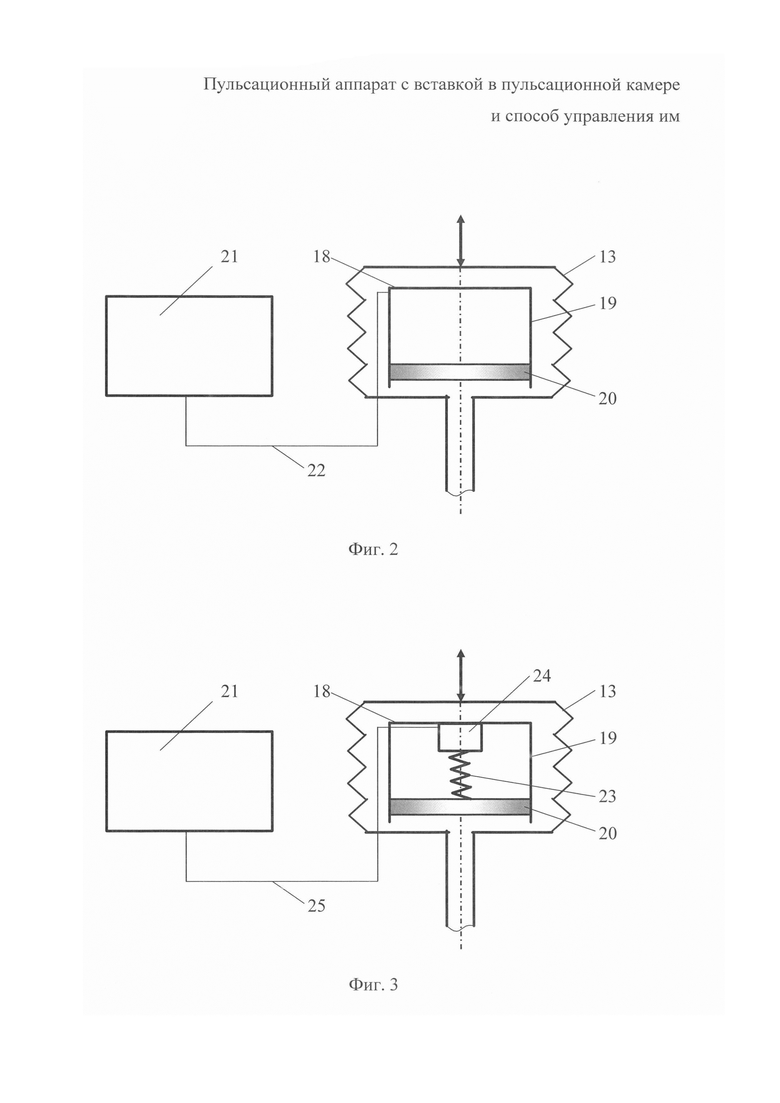
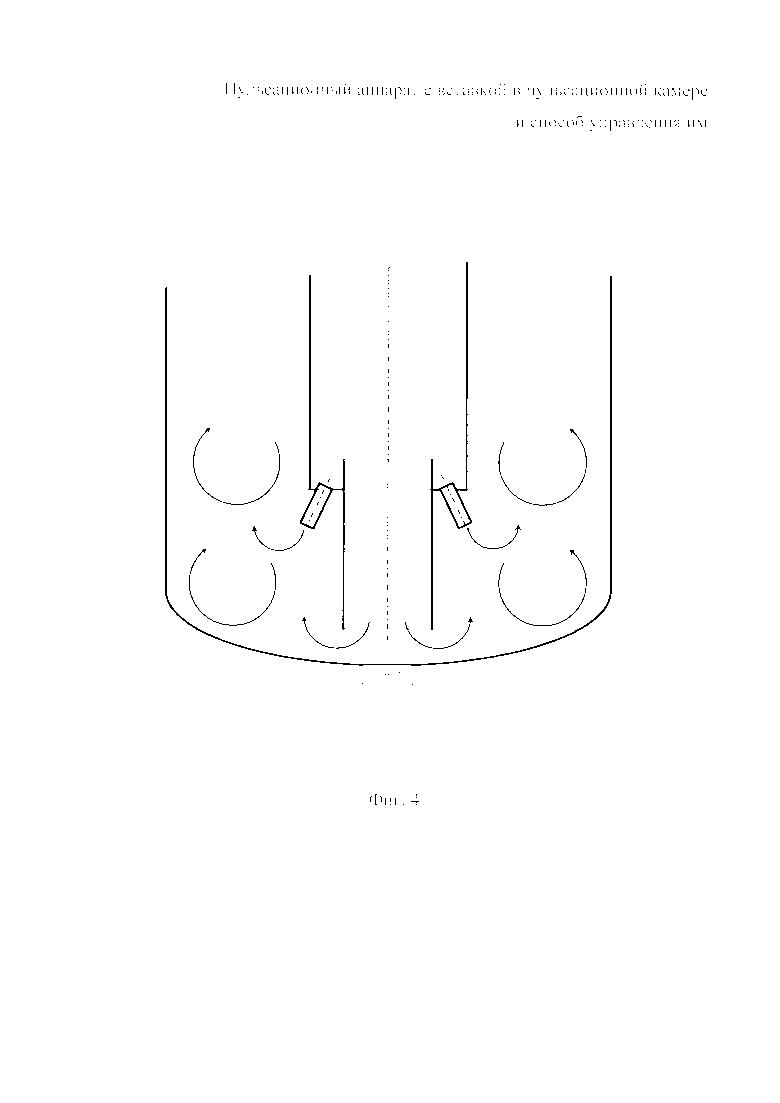
На фиг. 1 представлен общий вид аппарата (показаны уровень жидкости и уровень твердого слоя частиц, занимающего до 40-50% от общего объема рабочей среды), на фиг. 2 и 3 - схема вставки, выполненной в виде барабана, представляющего собой цилиндр с поршнем, находящегося внутри сильфонной камеры, на фиг. 2 - с использованием газообразного или жидкого рабочего тела для перемещения поршня, на фиг. 3 - с использованием винтовой передачи. На фиг. 4 представлена схема работы аппарата в процессе размывания осадка и эмульгирования.
Пульсационный аппарат для проведения массообменных процессов в гетерогенных системах жидкость - твердые частицы и жидкость - жидкость содержит вертикальный корпус 1 с размещенной в нем пульсационной трубой 2 с образованием зазора с днищем 3, к верхнему концу которой посредством пульсопровода 4 присоединен источник пневматических пульсаций 5. Над уровнем жидкости в кольцевой камере между трубой 2 и корпусом 1 аппарата и в трубе 2 при частичном заполнении аппарата формируются газонаполненные упругие элементы 6 и 7; в них может дополнительно подаваться сжатый газ-инерт. При необходимости организации «дыхания» аппарата (непрерывного протока газа-инерта, вводимого в кольцевую камеру между трубой 2 и корпусом 1) упругий элемент 6 может быть открытым, т.е. сообщаться с системой конденсации паров и очистки газов через дополнительный патрубок или штуцер 12.
Наличие газонаполненных упругих камер 6 и 7 позволяет установить собственную частоту колебаний системы «жидкость-частицы-газонаполненные элементы» в заданном диапазоне значений (в зависимости от размеров элементов аппарата, плотности обрабатываемой среды, давления в аппарате) и позволяет вести процесс в резонансном режиме колебаний с использованием генератора механических колебаний - электромеханического привода (привод на фиг. 1 условно не показан и представляет собой эксцентриковый, кривошипно-шатунный, коленчатый или иной механизм с двигателем, позволяющий создавать периодическое движение с заданной частотой и амплитудой).
Пульсационная труба 2 может быть выполнена ступенчатой с переходом от трубы 8 большего диаметра в верхней части к трубе 9 меньшего диаметра в нижней части, а в кольцевом зазоре между трубами большего 8 и меньшего 9 диаметра на нижней плоскости трубы 8 большего диаметра могут быть установлены кольцо 10 с соплами 11, направленными вниз вертикально или под углом. Струи жидкости, истекающие через сопла 11, позволяют размыть слой твердой фазы и открыть доступ к трубе 9 в начале процесса перемешивания, а труба 9, обладающая большим проходным сечением, после вовлечения в процесс колебаний среды в аппарате, обеспечивает высокую интенсивность колебаний.
Источник пневматических пульсаций 5 выполнен в виде мембранной, поршневой или сильфонной камеры 13 (показана на фиг. 2, далее без потери общности будем называть такую камеру сильфонной камерой), одна из стенок которой (крышка 14) выполнена подвижной и соединена с генератором механических колебаний с регулируемой частотой пульсаций (на фиг. 1 и 2 условно не показан), периодически сжимающим крышку 14 сильфонной камеры 13. Сильфонная камера 13 в нижней части посредством днища 15 соединена с пульсационной трубой 2 при помощи пульсопровода 4, представляющего собой трубу для передачи пневматических пульсаций (импульсов сжатого газа). Переменный объем сильфонной камеры 13 достигается за счет исполнения ее боковой части в виде сильфона 16, либо установки в верхней ее части мембраны (в случае применения мембранной камеры) или поршня (для поршневой камеры).
Штуцер 12 служит для загрузки исходных компонентов, а донный клапан 17 - для выгрузки готовых продуктов из аппарата. Сильфонная камера 13 является продолжением газонаполненной упругой камеры 7 и составляет с ней и пульсопроводом 4 единый объем.
Внутри газонаполненной упругой камеры 7, преимущественно в сильфонной камере 13, имеющей наибольший объем по сравнению с объемом пульсопровода 4 и объемом газа в пульсационной трубе 2, установлена вставка 18 с непроницаемыми стенками, габариты которой не препятствуют перемещению подвижной стенки газонаполненной упругой камеры и колебаниям газа в ней.
Вставка 18 может быть также установлена и внутри газонаполненной упругой камеры 6, если камера 6 герметизирована и не используется для организации «дыхания» аппарата. При этом вставок 18 может быть и несколько - по одной или более (например, для аппаратов больших объемов, или в различных частях камер 6 и 7) в каждой из газонаполненных упругих камер 6 и 7. На фиг. 2, 3 показан пример установки вставки 18 в газонаполненной упругой камере 7, аналогично вставка 18 может размещаться и в газонаполненной упругой камере 6 с закреплением на крышке аппарата.
Вставка 18 выполнена в виде барабана, представляющего собой цилиндр 19 с поршнем 20 (фиг. 2, 3), выполненного с возможностью перемещаться относительно цилиндра 19 при подаче управляющего сигнала от управляющего устройства - блока контроллера с исполнительным устройством 21. Возможность перемещения поршня 20 обеспечивается за счет того, что к цилиндру 19 подведена трубка 22 для подвода газообразного или жидкого рабочего тела от блока контроллера с исполнительным устройством 21 (исполнительное устройство выполнено в виде насоса или компрессора, в зависимости от вида рабочего тела), которое при необходимости изменения объема барабана нагнетает в его внутренний объем рабочее тело, в результате чего поршень 20 смещается. Применение жидкого рабочего тела предпочтительней, поскольку жидкая среда практически несжимаема при давлениях, типичных для таких аппаратов. Возможность перемещения поршня 20 может также обеспечиваться за счет того (фиг. 3), что внутри барабана 18 между цилиндром 19 и поршнем 20 установлена винтовая передача 23 с приводом 24, управление которой осуществляется по управляющему кабелю 25 от блока контроллера с исполнительным устройством 21 (в этому случае исполнительное устройство представляет собой электронную автоматику с силовым выходом). Вместо непосредственной подачи рабочих тел внутрь цилиндра в нем могут быть также установлены гидравлические или пневматические исполнительные механизмы.
Вставка 18 может устанавливаться на ножках-стойках, жестко закрепленных на днище 15, например, методом приварки, с обязательным образованием зазора не менее 10-15 мм между боковой стенкой вставки 18 и сильфонной камеры 13, а также зазорами между днищем 15 и нижней частью вставки 18, между крышкой 14 и верхом вставки 18. При необходимости организации доступа к пульсопроводу 4 при ремонте и обслуживании вставка 18 может устанавливаться как съемный элемент конструкции, опираясь на ножки-ребра, снабженные разжимным цанговым механизмом, который позволяет фиксировать положение вставки 18 относительно сильфонной камеры 13 в устье трубы пульсопровода 4 или элементов фланцевого соединения пульсопровода 4.
Для обеспечения равенства скоростей пульсирующего газа в сильфонной камере и трубе пульсопровода высота ножек-стоек или ножек-ребер предпочтительно должна составлять не менее d/4, где d - диаметр трубы пульсопровода 4.
Для контроля амплитуды пульсаций в аппарате используется датчик давления 26, присоединенный к газонаполненной упругой камере 7 или установленный непосредственно внутри нее. Сигнал с датчика давления 26 усиливается (усилитель на схеме условно не показан) и направляется в блок контроллера с исполнительным устройством 21. При наличии возможности (прозрачные стенки аппарата, наличие смотровых окон - иллюминаторов в аппарате) амплитуду колебаний и интенсивность перемешивания можно контролировать визуально.
Способ управления пульсационным аппаратом заключается в создании колебаний гетерогенной системы в аппарате посредством генерирования механических колебаний и их передаче через газ в газонаполненной упругой камере, при этому величину объема вставки 18 регулируют для достижения максимальной амплитуды колебаний гетерогенной системы в аппарате. Согласно теоретическим представлениям, амплитуда колебаний обратно пропорциональна корню квадратному из объема газа в газонаполненной упругой камере 7, поэтому, как правило, объем барабана необходимо увеличивать, чтобы уменьшить объем в газонаполненной упругой камере 7. Вместе с тем, при пуске аппарата часто требуется увеличение момента на приводном валу, связанное с необходимостью дополнительного преодоления сил инерции рабочей среды. Поэтому при пуске объем вставки 18 - барабана - следует уменьшать, увеличивая объем газа в газонаполненной упругой камере 7 и снижая ее жесткость. Максимальный объем вставки 18 - барабана - определяется конструктивными ограничениями, а именно границами сильфонной камеры 13 и необходимостью свободного прохода газа в зазорах между вставкой 18 и стенками сильфонной камеры 13.
Регулировка объема вставки 18 достигается за счет подачи (либо откачивания) в цилиндр 19 под давлением газообразного или жидкого рабочего тела при помощи блока контроллера с исполнительным устройством 21 либо за счет подачи сигнала на винтовую передачу 23 с приводом 24 от блока 21.
Аппарат работает следующим образом. В корпус 1 через штуцер 12 загружают исходные компоненты - две жидкие взаимно нерастворимые фазы, либо жидкую и твердую фазы, после чего штуцер 12 закрывают либо подключают к системе «дыхания». Включают генератор механических колебаний, преимущественно с частотой, близкой к частоте собственных колебаний системы, за счет чего обеспечиваются резонансные колебания гетерогенной смеси в аппарате. Значение угловой частоты резонансных колебаний ω0 определяют расчетным путем (Абиев Р.Ш., Островский Г.М. Пульсационная резонансная аппаратура для процессов в жидкофазных средах// Хим. пром., 1998, №8, с. 468-478; Абиев Р.Ш. Моделирование нелинейных колебаний жидкости в пульсационном аппарате переменного сечения с использованием одномерной модели// Теор. основы хим. технол., 2017, том 51, №1, с. 58-71) либо экспериментально - по максимальной амплитуде пульсаций уровня жидкости или пульсаций давления, определяемому по датчику давления 26. Благодаря тому, что частота пульсаций в аппарате находится в узком интервале вблизи частоты резонансных колебаний, в гетерогенной системе в аппарате возникают интенсивные колебания, характеризуемые возрастанием амплитуды колебаний всех гидродинамических параметров: скорости, ускорения, давления в упругих элементах 6 и 7.
В отличие от прототипа, в котором объем газонаполненной упругой камеры 7, включая объем сильфонной камеры 13, достаточно велик, и поэтому жесткость низка, в предлагаемом устройстве уменьшение объема газонаполненной упругой камеры 7 за счет установки внутри газонаполненной упругой камеры 7 вставки 18 с непроницаемыми стенками приводит к увеличению жесткости увеличению газонаполненной упругой камеры 7, и как следствие, к увеличению амплитуды пульсаций жидкости в аппарате при заданной частоте и амплитуде колебаний источника пневматических пульсаций. Таким образом, использование вставки 18 позволяет дополнительно повысить амплитуду колебаний рабочей среды даже при резонансных колебаниях.
После загрузки аппарата твердой фазой нижний срез трубы 9 оказывается глубоко погруженным в слой твердых частиц, а сопла 11 остаются свободными либо погружены на небольшую глубину. При заливке жидкой фазы в трубу 2 выходы из сопел 11 немного освобождаются, в той степени, которая позволяет жидкости пульсировать, прорываясь через слой частиц, а труба 9 при этом остается заваленной и практически не участвует в процессе перемешивания. Как только в результате частичного растворения твердой фазы освобождается нижний конец трубы 9, пульсации жидкости распределяются между трубой 9 и соплами 11. Веерообразная струя, формируемая в кольцевой щели между нижним срезом трубы 9 и дном 3 аппарата, создает крупномасштабное перемешивание с образованием устойчивого тороидального вихря вблизи дна аппарата (Фиг. 4). Струи, истекающие из сопел 11, активно воздействуют на вышележащие слои, подхватывая макрообъемы жидкости, поднятые вихрем со дна, и перераспределяют их. Это способствует более быстрому растворению твердой фазы и ее распределению в объеме жидкости.
По сравнению с известными устройствами предлагаемое изобретение позволяет повысить жесткость колебательной системы, а именно жесткость газонаполненной упругой камеры 7 за счет уменьшения ее общего объема. В результате снижается демпфирование импульса, распространяющегося по газу в газонаполненной упругой камере 7 через пульсопровод 4 по направлению к жидкости в пульсационной трубе 2 и вокруг нее в аппарате. Согласно теоретическим представлениям, подтвержденным экспериментально, амплитуда пульсаций скорости жидкости в соплах 11 и на выходе из трубы 9, а также амплитуда пульсаций давления в пульсационной трубе 2 обратно пропорциональна корню квадратному из объема газа в газонаполненной упругой камере 7. Поэтому уменьшение этого объема вдвое приводит к увеличению амплитуды пульсаций скорости жидкости в соплах 11, трубе 9 и амплитуды пульсаций давления в пульсационной трубе 2 и в самом аппарате в √2≈1,4 раза. В результате число Рейнольдса при перемешивании Re также возрастает примерно в 1,4 раза, а число Нуссельта при турбулентном режиме (Аксельруд Г.А., Молчанов А.Д. Растворение твердых веществ. М.: "Химия", 1977. 272 с; с. 138) пропорционально числу Рейнольдса в степени 0,6, и поэтому оно возрастет, согласно теоретическим оценкам, в 1,22 раза.
Пульсирующие струи, прорывающиеся через сопла 11, проникая глубоко в слой частиц (либо в слой тяжелой жидкости) с более высокой скоростью по сравнению с прототипом, быстрее размывают его (Фиг. 4), способствуя сильному диспергированию жидкости (для систем жидкость-жидкость) либо к взвешиванию твердой фазы (для систем жидкость-твердое), а частицы дисперсной фазы с высокой равномерностью распределяются по объему аппарата. За счет этого существенно возрастает площадь контакта фаз, увеличивается скорость их относительного движения, что приводит к многократному ускорению процессов массообмена между жидкой сплошной фазой и дисперсной (твердой или жидкой) фазой. Кроме того, при обработке систем жидкость-жидкость происходит тонкое эмульгирование одной жидкой фазы в другой, обусловленное более высокой скоростью струй в соплах 11, также сопровождающееся созданием развитой поверхности контакта фаз и образованием динамически устойчивой эмульсии во всем объеме аппарата. Это способствует быстрому протеканию массообменных процессов и более рациональному использованию вводимой в аппарат энергии.
Вышеуказанные явления и процессы приводят к существенному улучшению условий перемешивания и повышению эффективности работы аппарата.
Пример конкретного выполнения 1. Процесс в известном устройстве. В аппарат-прототип, выполненный по пат. РФ №2497579, с диаметром корпуса 500 мм и диаметром пульсационной трубы 200 мм, снабженный 81 соплами диаметром 6 мм (уровень нижних сопел 150 мм от дна аппарата) и двумя смотровыми окнами в боковой стенке, насыпан слой речного песка высотой 200 мм и залита вода до уровня 900 мм. Сильфонная камера имела диаметр 400 мм, высоту 450 мм и общий объем газонаполненной упругой камеры 7 составлял 75 л (0,075 м3). При этом коэффициент жесткости равен 1908 Н/м, а максимальная расчетная амплитуда пульсаций давления в газонаполненной упругой камере 7 составляет 2,31 кПа.
При включении пульсационного устройства струи, истекающие из сопел, в нижней части трубы размыли слой песка в виде «кратеров» диаметром до 50 мм, в которых наблюдается движение частиц песка. Остальная масса песка неподвижна. Частота колебаний источника пневматических пульсаций 5 варьировалась от 1 Гц до 1,8 Гц, на результат перемешивания существенного влияния не оказывала.
Затем в аппарат засыпано 50 кг поваренной соли (NaCl), вода залита до уровня 900 мм. Продолжительность процесса растворения соли составила 120 минут.
Пример конкретного выполнения 2. Процесс в предлагаемом устройстве. При проведении того же процесса в аппарате, выполненному по предлагаемому изобретению (фиг. 1, 2) диаметры трубы 8 и трубы 9 составляли соответственно 200 мм и 140 мм. В аппарат засыпано 50 кг поваренной соли (NaCl), вода залита до уровня 900 мм. Сильфонная камера также имела диаметр 400 мм, высоту 450 мм, начальный объем барабана задавали равным 20 л (0,020 м3) и общий объем газонаполненной упругой камеры 7 снизился до 55 л (0,055 м3). При этом коэффициент жесткости возрос до 2607 Н/м, а максимальная расчетная амплитуда пульсаций давления в газонаполненной упругой камере 7 составила 8,8 кПа, что подтверждено показаниями датчика давления 26 с показывающим прибором.
Частоту пульсаций генератора механических колебаний варьировали в диапазоне от 1,07 Гц до 1,8 Гц. Установлено, что наибольшая интенсивность перемешивания наблюдается при 1,25-1,35 Гц, что соответствует расчетному значению резонансной частоты колебаний. По мере «ухода» с резонансной частоты интенсивность перемешивания постепенно снижалась, вплоть до практического полного затухания при приближении к крайним значениям указанного диапазона частоты пульсаций.
Зафиксировали частоту колебаний генератора механических колебаний на уровне 84 об/мин (1,3 Гц). Наблюдается вертикальное колебание жидкости в аппарате амплитудой 15-20 мм и интенсивное перемешивание частиц соли. Полное растворение соли произошло за 42 мин. С помощью ареометра произведен замер плотности полученного раствора соли, которая составила 1,2 г/см3, что соответствует насыщенному раствору соли. Таким образом, применение вставки позволило существенно сократить продолжительность процесса растворения за счет интенсификации перемешивания.
Пример конкретного выполнения 3. Условия опыта - те же, что и в примере конкретного выполнения 2. Использовали дополнительное средство управления интенсивностью колебаний в аппарате: при фиксированной частоте колебаний генератора механических колебаний варьировали объем вставки 18 - барабана.
Объем барабана увеличили до 42 л (0,042 м3), в результате чего общий объем газонаполненной упругой камеры 7 снизился до 32 л (0,032 м3). При этом коэффициент жесткости возрос до 4445 Н/м, а максимальная расчетная амплитуда пульсаций давления в газонаполненной упругой камере 7 составила 14,9 кПа (подтверждено показаниями датчика давления 26 с показывающим прибором). Полное растворение соли произошло за 36 мин.
Таким образом, изменение объема вставки позволяет увеличить амплитуду колебаний гетерогенной системы в аппарате и интенсифицировать процесс растворения твердой фазы.
Пример конкретного выполнения 4. Условия опыта - те же, что и в примере конкретного выполнения 2, но вместо твердой фазы в аппарат залито моторное масло в объеме 25 литров, сверху залита вода, так что общий уровень составил 900 мм от дна. Включили источник пневматических пульсаций 5; эмульсия с минимальным размером капель получена при частоте вращения вала привода 84-95 об/мин (частота пульсаций 1,4-1,58 Гц). Через 5 минут работы пульсационного устройства стали появляться капельки масла в нижних слоях, в области выброса струи из сопел устройства. Данный опыт показывает возможности эмульгирования в предлагаемом аппарате, а также подтверждает теоретические представления об увеличении частоты резонансных колебаний при уменьшении плотности рабочей среды в аппарате.
Таким образом, предлагаемое изобретение позволяет повысить эффективность работы аппарата, улучшить условия перемешивания и ускорить процессы растворения за счет увеличения амплитуды резонансных колебаний суспензии в аппарате при заданной амплитуде колебаний приводного рабочего органа, а также упростить условия управления процессом резонансных колебаний в аппарате за счет введения дополнительной управляющей переменной - объема вставки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пульсационный аппарат с двухступенчатой пульсационной трубой | 2017 |
|
RU2660150C1 |
| Пульсационный аппарат с двухступенчатой пульсационной трубой и дополнительной секцией сопел | 2017 |
|
RU2664917C1 |
| ПУЛЬСАЦИОННЫЙ АППАРАТ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2011 |
|
RU2497579C2 |
| СПОСОБ ОБРАБОТКИ МЕЛКОЗЕРНИСТЫХ И ПОРОШКООБРАЗНЫХ МАТЕРИАЛОВ ЖИДКОСТЯМИ И АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2325208C2 |
| Пульсационный реактор | 1990 |
|
SU1733071A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПУЛЬСАЦИОННЫЙ КЛАПАННЫЙ ПОГРУЖНОЙ НАСОС | 2004 |
|
RU2275534C2 |
| ПУЛЬСАЦИОННЫЙ КЛАПАННЫЙ ПОГРУЖНОЙ НАСОС | 2012 |
|
RU2493623C1 |
| АППАРАТ ДЛЯ ПРОВЕДЕНИЯ ПРОЦЕССОВ В СИСТЕМАХ ЖИДКОСТЬ - ЖИДКОСТЬ И ЖИДКОСТЬ-ТВЕРДЫЕ ЧАСТИЦЫ (ВАРИАНТЫ) | 2004 |
|
RU2293600C2 |
| ПУЛЬСАЦИОННО-ЦЕНТРОБЕЖНЫЙ СМЕСИТЕЛЬ | 2008 |
|
RU2379098C1 |
| ПУЛЬСАЦИОННЫЙ КЛАПАННЫЙ ПОГРУЖНОЙ НАСОС | 2013 |
|
RU2533656C1 |
Изобретение относится к аппаратам для проведения массообменных процессов в гетерогенных системах жидкость - твердые частицы и жидкость - жидкость (например, растворение, дегидратация, эмульгирование, экстрагирование), в том числе для процессов, в которых твердые частицы склонны к образованию больших труднорастворимых кусков, например при абсорбции атмосферной влаги либо при контакте твердой фазы с жидкостью, а после растворения твердой фазы продолжается процесс взаимодействия между тяжелым концентрированным раствором и непрореагировавшей легкой жидкостью, либо при суспендировании полидисперсной смеси частиц, образующих плотный осадок, в том числе гелеобразный, и может быть использовано в химической, нефтехимической, фармацевтической, пищевой, биотехнологической и других отраслях промышленности. Пульсационный аппарат для проведения массообменных процессов в гетерогенных системах жидкость - твердые частицы и жидкость - жидкость содержит вертикальный корпус с размещенной в нём пульсационной трубой с образованием зазора с днищем, к верхнему концу которой посредством пульсопровода присоединен источник пневматических пульсаций, выполненный в виде сильфонной камеры, одна из стенок которой выполнена подвижной и соединена с генератором механических колебаний, аппарат содержит газонаполненные упругие камеры, соединенные с пульсационной трубой и с кольцевым пространством вокруг нее, внутри газонаполненной упругой камеры, соединенной с пульсационной трубой, установлена вставка с непроницаемыми стенками, габариты которой не препятствуют перемещению подвижной стенки сильфонной камеры и колебаниям газа в ней. Способ управления пульсационным аппаратом заключается в создании колебаний гетерогенной системы в аппарате посредством генерирования механических колебаний источником пневматических пульсаций и их передаче через газ в газонаполненной упругой камере, соединенной с пульсационной трубой, величину объема вставки устанавливают такой, чтобы обеспечить максимальную амплитуду колебаний гетерогенной системы в аппарате. Изобретение позволяет повысить эффективность работы аппарата, улучшить условия перемешивания и ускорить процессы растворения, в том числе больших труднорастворимых кусков твердой фазы, а также суспендирования плотных слоев твердых частиц за счет тонкого «эмульгирования» одной жидкой фазы (высококонцентрированного раствора) в другой (в низкоконцентрированном растворе). 2 н. и 1 з.п. ф-лы, 4 ил.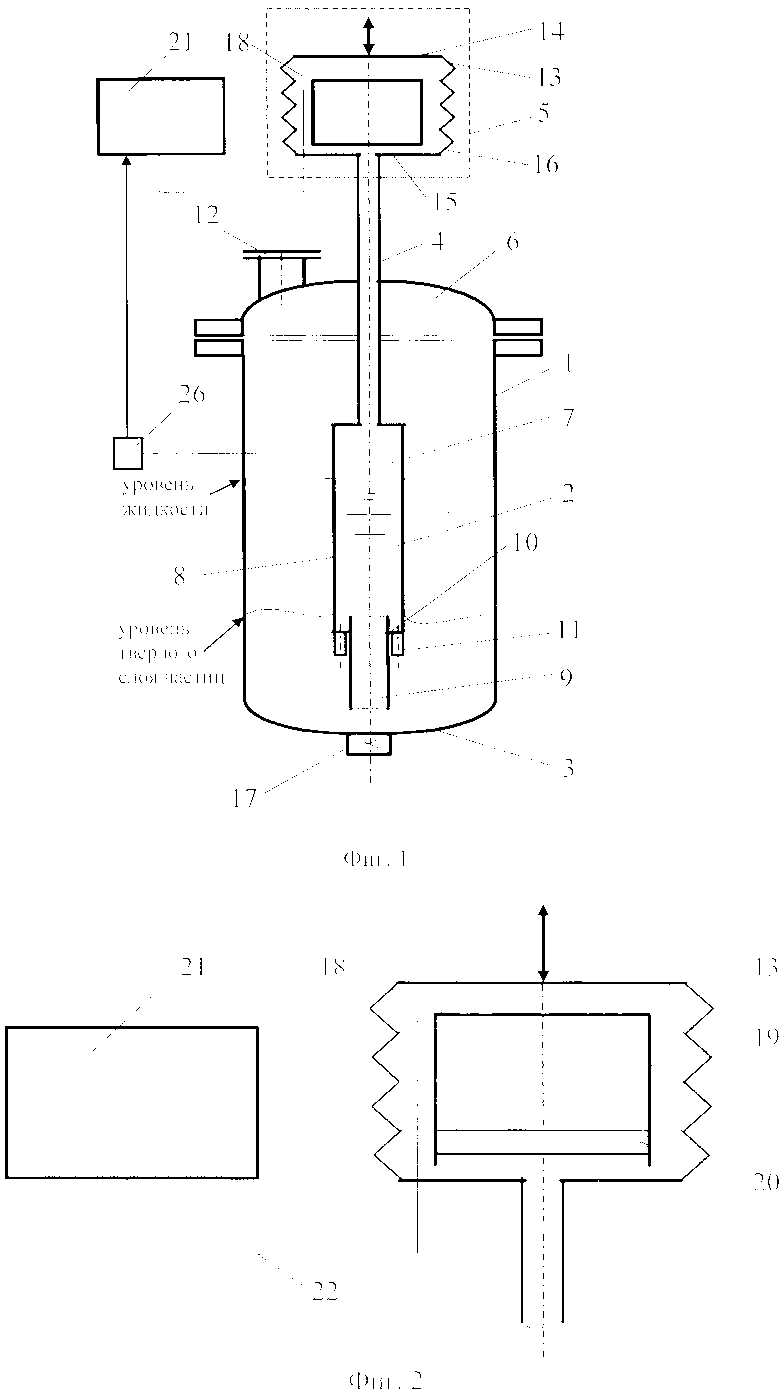
1. Пульсационный аппарат для проведения массообменных процессов в гетерогенных системах жидкость - твердые частицы и жидкость - жидкость, содержащий вертикальный корпус с размещенной в нём пульсационной трубой с образованием зазора с днищем, к верхнему концу которой посредством пульсопровода присоединен источник пневматических пульсаций, выполненный в виде сильфонной камеры, одна из стенок которой выполнена подвижной и соединена с генератором механических колебаний, при этом аппарат содержит газонаполненные упругие камеры, соединенные с пульсационной трубой и с кольцевым пространством вокруг нее, отличающийся тем, что внутри газонаполненной упругой камеры, соединенной с пульсационной трубой, установлена вставка с непроницаемыми стенками, габариты которой не препятствуют перемещению подвижной стенки сильфонной камеры и колебаниям газа в ней.
2. Пульсационный аппарат по п. 1, отличающийся тем, что вставка выполнена в виде барабана, представляющего собой цилиндр с поршнем, выполненного с возможностью перемещения относительно цилиндра при подаче управляющего сигнала.
3. Способ управления пульсационным аппаратом по п. 1, заключающийся в создании колебаний гетерогенной системы в аппарате посредством генерирования механических колебаний источником пневматических пульсаций и их передаче через газ в газонаполненной упругой камере, соединенной с пульсационной трубой, отличающийся тем, что величину объема вставки устанавливают такой, чтобы обеспечить максимальную амплитуду колебаний гетерогенной системы в аппарате.
| ПУЛЬСАЦИОННЫЙ АППАРАТ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2011 |
|
RU2497579C2 |
| РЕЗОНАНСНЫЙ АППАРАТ | 1992 |
|
RU2033855C1 |
| RU 2004316 C1, 15.12.1993 | |||
| Пульсационный реактор | 1990 |
|
SU1733071A1 |
| US 3226092 A1, 28.12.1965 | |||
| Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях | 1981 |
|
SU948787A2 |

