Изобретение относится к медицинской технике и может быть использовано в лечебно-профилактических учреждениях широкого профиля, а также в домашних условиях для размещения лежачих пациентов и обеспечения физиологически правильного расположения больного.
Известна многофункциональная кровать, характеризующаяся тем, что включает станину, выполненную из продольных и поперечных балок и снабженную укрепленными на поперечных балках вертикальными направляющими; установленные с возможностью перемещения по вертикальным направляющим спинки кровати, снабженные механизмом их подъема, включающим коаксиальные направляющие, установленные с возможностью перемещения в них стойки, и привод перемещения спинок; установленную с возможностью вращения относительно продольной оси кровати раму, выполненную из поперечных и продольных планок, и имеющую полуободы для обеспечения поворота рамы вручную, при этом полуободы рамы и спинок кровати соединены шарнирно, причем один из шарниров укреплен в спинке кровати, а другой выполнен сферическим и установлен в полуободе рамы и соединен со спинкой посредством штанги; ложе, установленное внутри рамы с возможностью поворота, вращения и вертикального подъема относительно поперечной оси рамы, при этом ложе выполнено из отдельных секций, одна из которых неподвижна относительно рамы, а остальные установлены с возможностью поворота; привод, размещенный на одной из спинок кровати и обеспечивающий вращение рамы и установки ложа; спаренный привод для обеспечения комбинированного поворота ложа и секций ложа (патент RU2538459, МПК A61G 7/00, опубл. 10.01.2015 г.).
Известна медицинская кровать (патент RU2293547, МПК A61G 7/015, опубл. 20.02.2007 г.). Во всех вариантах своего выполнения кровать содержит основание с самоориентирующимися колесами, привод и ложе. Колеса установлены на вертикальных стойках. Ложе размещено на основании и выполнено из подвижных секций. Ложе имеет не менее трех подвижных секций с рычажными приводными опорами и, как минимум, одну неподвижную секцию. В первом варианте выполнения кровать содержит основание в виде фермы в форме параллелепипеда, углы ребер которого соединены с вертикальными стойками крепежными трубами. Привод выполнен в виде механических, или пневмомеханических, или гидромеханических, или электросиловых телескопических рабочих элементов. У торца ложа расположены рычаги управления для стоящего человека. Параллельно подключены рычаги управления для человека, лежащего на ложе. Концы, как минимум, одного телескопического рабочего элемента шарнирно соединены с приводными рычажными опорами по крайней мере двух подвижных секций, и концы, как минимум, двух телескопических рабочих элементов соединены посредством шарниров с основанием и с рычажными приводными опорами подвижных секций, которые установлены у торцов неподвижной секции. Во втором варианте выполнения кровати основание выполнено в виде фермы в форме параллелепипеда, углы ребер которого соединены с вертикальными стойками крепежными трубами. Привод выполнен в виде шарнирно прикрепленных к основанию двигателей с силовыми винтами. Винты взаимосвязаны с подвижными секциями посредством силовых гаек и закрепленных на подвижных секциях рычажных приводных опор. В третьем варианте своего выполнения медицинская кровать содержит основание в виде фермы в форме параллелепипеда, углы ребер которого попарно соединены с каждой вертикальной стойкой тягами. Тяги образуют с ребрами параллелепипеда прямоугольник с угловыми шарнирами. На концах параллелепипеда установлены механические, или пневмомеханические, или гидромеханические, или электросиловые телескопические элементы для подъема и/или наклона основания. Телескопические элементы, соединенные концевыми шарнирами с ребрами параллелепипеда и с тягами.
Известна медицинская кровать, которая содержит основание с колесами, на котором установлены поворотная спинная, центральная и ножная панели, которые шарнирно связаны между собой. Основание снабжено пазами. По пазам перемещаются подвижные опоры, оси которых установлены на центральной и ножной панелях. Спинная панель имеет ось поворота, которая проходит через основание и расположена таким образом, что вектор силы тяжести тела больного проходит через шарнирное соединение центральной и спинной панелей. Спинная панель шарнирно опирается на шток. Шток связан с тормозом. Тормоз закреплен на основании и дистанционно управляем посредством тросиков, с помощью рукояток. Рукоятки расположены на основании с учетом антропометрических характеристик тела человека (патент RU2357717, МПК A61G 7/015, опубл. 10.06.2009 г.).
Недостатки известных аналогов – невозможность или неудобство самостоятельного управления устройством.
Техническая проблема, решаемая изобретением - самостоятельное управление пациентом секциями кровати.
Технический результат - самостоятельное поднимание и опускание пациентом спинной, тазобедренной, икроножной секций кровати (без помощи медицинского персонала), с исключением необходимости для пациента приподниматься, вставать с кровати.
Проблема решается, а технический результат достигается медицинской кроватью, содержащей каркас с основанием подъема ложа, имеющим самоориентирующиеся колеса, которые соединены болтовым креплением с опорами основания подъема ложа, при этом ложе включает три подвижные секции – спинную, промежуточную и ножную, имеющие приводные рычажные опоры, и одну центральную неподвижную секцию ложа, соединённые между собой болтовым креплением, причем для регулирования подвижных секций ложа устройство содержит электродвигатели, при этом электродвигатель для регулирования спинной секции ложа соединен посредством болтового соединения с каркасом и с рычажной приводной опорой, являющейся сварным элементом на спинной секции ложа, электродвигатель для регулирования промежуточной и ножной секции ложа соединен посредством болтового соединения с каркасом и с рычажной приводной опорой, являющейся сварным элементом на промежуточной секции ложа, а электродвигатель для регулирования высоты подъема и опускания кровати соединен посредством болтового соединения с каркасом и с рычажной приводной опорой, являющейся сварным элементом основания подъема ложа, кроме того, устройство включает блок дистанционного управления с предустановленным программным обеспечением для дистанционного управления кроватью, причем блок дистанционного управления имеет два режима работы - режим настройки подключения и режим удаленного управления приводами, подключен к источнику питания и одновременно подключен проводным соединением к стационарному блоку управления, преобразующего сигнал с блока дистанционного управления в рабочее напряжение для электродвигателей с приведением их в линейное движение, причем стационарный блок управления имеет индивидуальные для каждого из электродвигателей разъемы для проводного соединения, разъем для подключения дистанционного блока управления проводным соединением, а также имеет подключение к источнику питания напряжением 220В, при этом на кровати в зоне доступа пациента размещено мобильное устройство с предустановленным программным обеспечением для управления функциями кровати, а мобильное устройство и блок дистанционного управления подключены к одной доступной WiFi сети.
Согласно изобретению:
- на каркасе также закреплен стационарный пульт управления, подключенный к дистанционному блоку управления проводным соединением с возможностью управления функциями медицинской кровати стационарно.
- мобильное устройство выполнено в виде планшетного компьютера или смартфона;
- кровать содержит крепления для капельницы, крепление для установки стойки подтягивания пациента, спинки, отверстия, закрытые пластиковыми заглушками для установки поручней.
Технический результат достигается тем, что регулировка секций ложа кровати может осуществляться пациентом самостоятельно за счет следующего. Кровать имеет блок дистанционного управления, который связан с помощью сигнала WiFi с мобильным приложением, установленным на специальное мобильное устройство (планшетный компьютер, смартфон и т.п.). Мобильное устройство – съемное, размещено на кровати, в зоне доступа пациента. На мобильное устройство установлено приложение для управления функциями кровати и для просмотра фильмов, чтения книг и другое, для комфортного пребывания в условиях стационара.
Сущность изобретения поясняется чертежами, где показана заявляемая медицинская кровать:
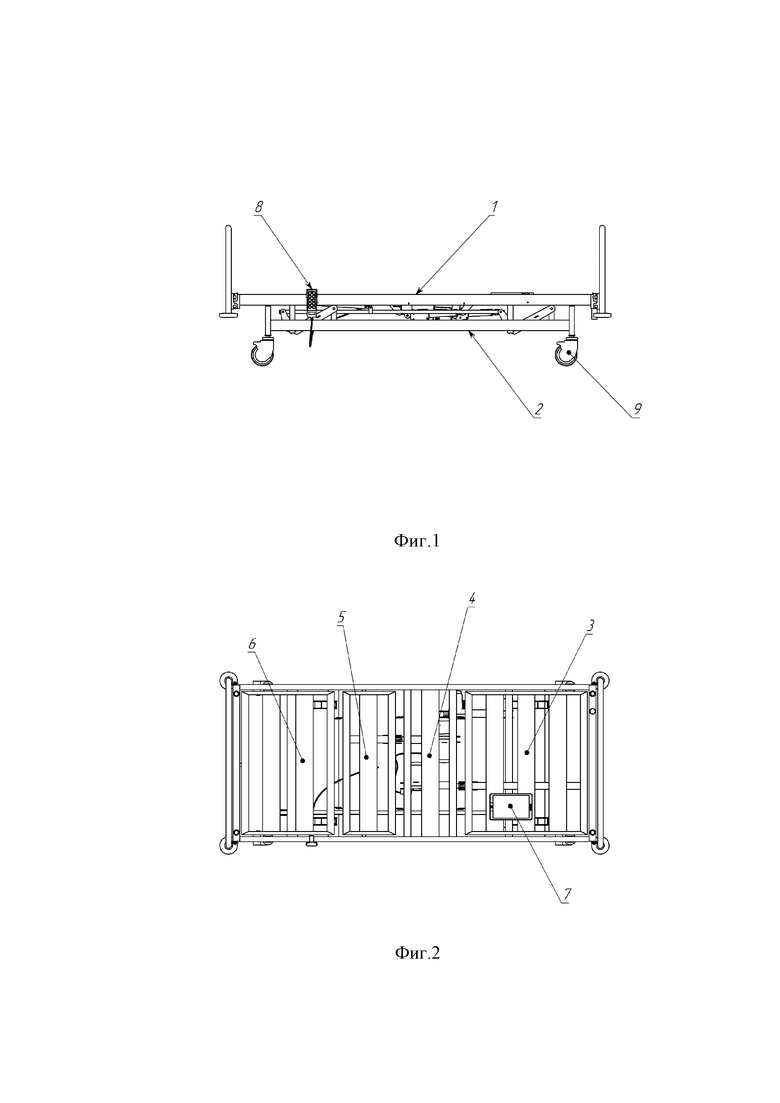
Фиг.1 – вид сбоку;
Фиг.2 – вид сверху;
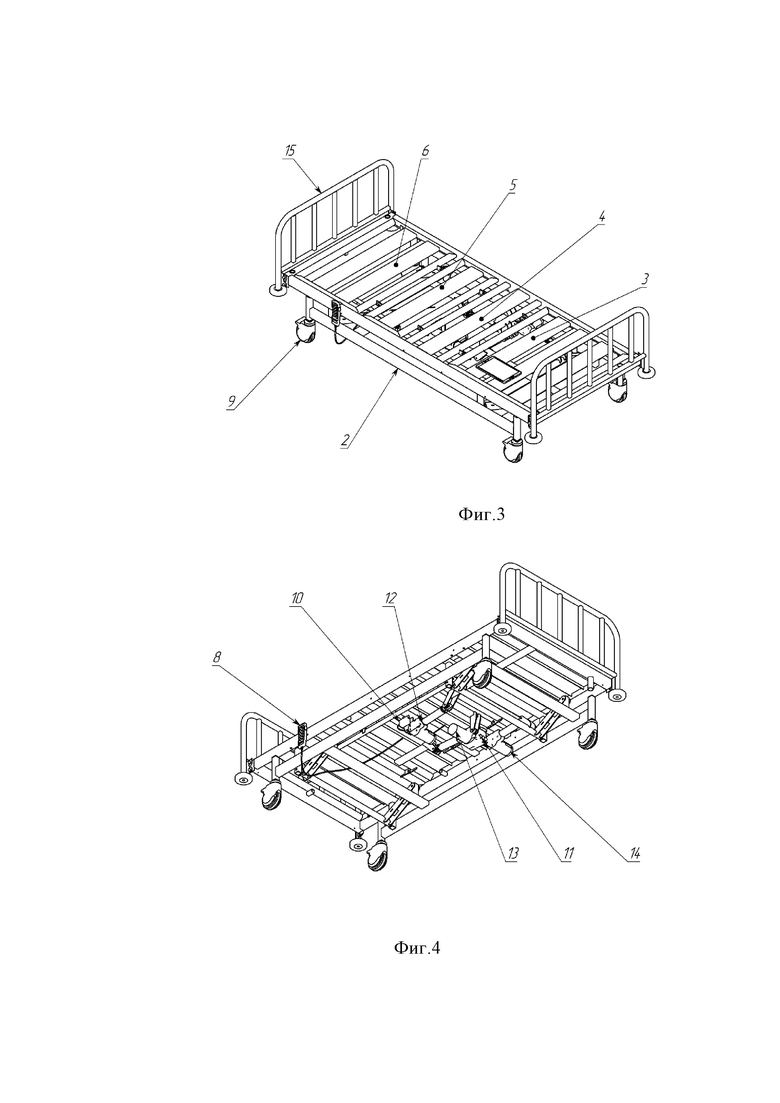
Фиг.3 – вид сверху в аксонометрии;
Фиг.4 – вид кровати под секциями ложа.
На фигурах обозначено:
1. Каркас кровати
2. Основание подъема ложа
3. Спинная секция ложа
4. Центральная неподвижная секция ложа
5. Промежуточная секция ложа
6. Ножная секция ложа
7. Мобильное устройство
8. Стационарный пульт управления
9. Колеса самоориентирующиеся
10. Блок дистанционного управления
11. Стационарный блок управления
12. Электродвигатель для регулирования спинной секции ложа;
13. Электродвигатель для регулирования промежуточной и ножной секции ложа;
14. Электродвигатель для регулирования высоты подъема и опускания кровати;
15. Спинка кровати
Заявляемое устройство работает следующим образом.
Управление движением подвижных секций ложа (3, 5, 6) осуществляются дистанционно за счет управления с мобильного устройства (7) с предустановленным мобильным приложением, а также в частном случае с помощью стационарного пульта управления (8) или совместно. При дистанционном управлении функциями кровати пациентом команда с мобильного устройства (7) поступает на блок дистанционного управления (10). Блок дистанционного управления (10) имеет два режима работы: режим настройки подключения и режим удаленного управления приводами. При использовании устройства пациентом блок дистанционного управления находится в режиме удаленного управления электродвигателями (12, 13, 14). При активированном режиме управления электродвигателями (12, 13, 14) кровати на блоке дистанционного управления (10) горит зеленый индикаторный светодиод. После начала управления с помощью мобильного устройства (7) индикация отсутствует. Дистанционное управление кроватью осуществляется через запуск на мобильном устройстве (7) предустановленного программного обеспечения. При включении мобильного устройства пациент видит иконки «Скайп», «ТВ каналы», «Новости», «Электронные книги», «Фильмы», «Информация для пациентов», «Управление кроватью», «Подъем», «опускание» кровати и секций. Пользуясь инструкцией по эксплуатации, можно подключить мобильное устройство к блоку дистанционного управления, для чего необходимо запустить приложение Reabilitic на мобильном устройстве, перейти из главного меню в раздел «Управление» и в правом верхнем углу нажать на кнопку «Найти устройство». Откроется окно, где будет происходить автоматический поиск устройств. Необходимо дождаться окончания процесса и выбрать необходимое устройство по MAC-адресу. Об успешной привязке к блоку дистанционного управления пациент будет проинформирован с помощью всплывающей подсказки. После того как устройства сопряжены, кнопка «Найти устройство» будет скрыта. Команда осуществляется условным нажатием на соответствующие условные кнопки в меню управления кроватью мобильного приложения. Условные кнопки выполнены в виде графического изображения, имеют удобную индикацию определения задающейся команды. Сигнал команды поступает непосредственно на блок дистанционного управления (10) электродвигателями (12, 13, 14), далее передается проводным соединением на стационарный блок управления (11), имеющий 4 разъема для проводного соединения с электродвигателями (12, 13, 14) и блоком дистанционного управления (10), и который, при поступлении на него соответствующей команды от блока дистанционного управления (10), приводит в линейное движение соответствующий электродвигатель. Электродвигатель (12), с помощью которого осуществляется регулировка спинной секции ложа (3) медицинской кровати, соединен посредством болтового соединения с каркасом (1) и с рычажной приводной опорой, являющейся сварным элементом на спинной секции ложа (3). Электродвигатель (13), с помощью которого осуществляется регулировка промежуточной (5) и ножной (6) секции ложа медицинской кровати, соединен посредством болтового соединения с каркасом (1) и с рычажной приводной опорой, являющейся сварным элементом на промежуточной секции ложа (5). Электродвигатель (14), с помощью которого осуществляется регулировка высоты подъема и опускания медицинской кровати, соединен посредством болтового соединения с каркасом (1) и с рычажной приводной опорой, являющейся сварным элементом основания подъема ложа (2). Управлять движением электродвигателей (12, 13, 14) также возможно при использовании стационарного пульта управления (8), имеющего проводное соединение с блоком дистанционного управления (10).
| название | год | авторы | номер документа |
|---|---|---|---|
| Медицинская кровать | 2019 |
|
RU2696103C1 |
| Многофункциональная медицинская кровать | 2021 |
|
RU2753199C1 |
| ФУНКЦИОНАЛЬНАЯ МЕДИЦИНСКАЯ КРОВАТЬ (ВАРИАНТЫ) | 2010 |
|
RU2447872C1 |
| КРОВАТЬ СБОРНО-РАЗБОРНАЯ МОБИЛЬНАЯ | 2018 |
|
RU2690144C1 |
| КРОВАТЬ ФУНКЦИОНАЛЬНАЯ | 2002 |
|
RU2221534C1 |
| ФУНКЦИОНАЛЬНАЯ КРОВАТЬ | 2016 |
|
RU2653049C2 |
| КРОВАТЬ МЕДИЦИНСКАЯ | 2007 |
|
RU2357717C2 |
| РЕАБИЛИТАЦИОННАЯ КИНЕТИЧЕСКАЯ СИСТЕМА ДЛЯ ОБЕЗДВИЖЕННЫХ БОЛЬНЫХ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ | 2012 |
|
RU2490002C1 |
| МЕДИЦИНСКАЯ КРОВАТЬ | 2010 |
|
RU2438640C1 |
| МЕДИЦИНСКАЯ КРОВАТЬ С АВТОМАТИЗИРОВАННЫМ КОМПЬЮТЕРНЫМ РАБОЧИМ МЕСТОМ | 2021 |
|
RU2780127C1 |
Изобретение относится к медицинским кроватям и направлено на повышение комфортности использования кровати пациентом самостоятельно. Медицинская кровать содержит каркас с основанием подъема ложа, имеющим самоориентирующиеся колеса, которые соединены болтовым креплением с опорами основания подъема ложа. Ложе включает спинную, промежуточную и ножную секции, имеющие приводные рычажные опоры, и одну центральную неподвижную секцию ложа, соединённые между собой болтовым креплением. Устройство содержит электродвигатели. Электродвигатель для регулирования спинной секции соединен с каркасом и с рычажной приводной опорой. Электродвигатель для регулирования промежуточной и ножной секций соединен с каркасом и с рычажной приводной опорой. Электродвигатель для регулирования высоты подъема и опускания кровати соединен с каркасом и с рычажной приводной опорой. Устройство включает блок дистанционного управления с двумя режимами, подключенный проводным соединением к стационарному блоку управления. На кровати в зоне доступа пациента размещено мобильное устройство, которое вместе с блоком дистанционного управления подключено к одной доступной WiFi сети. 3 з.п. ф-лы, 4 ил.
1. Медицинская кровать, содержащая каркас с основанием подъема ложа, имеющим самоориентирующиеся колеса, которые соединены болтовым креплением с опорами основания подъема ложа, при этом ложе включает три подвижные секции - спинную, промежуточную и ножную, имеющие приводные рычажные опоры, и одну центральную неподвижную секцию ложа, соединённые между собой болтовым креплением, причем для регулирования подвижных секций ложа устройство содержит электродвигатели, при этом электродвигатель для регулирования спинной секции ложа соединен посредством болтового соединения с каркасом и с рычажной приводной опорой, являющейся сварным элементом на спинной секции ложа, электродвигатель для регулирования промежуточной и ножной секций ложа соединен посредством болтового соединения с каркасом и с рычажной приводной опорой, являющейся сварным элементом на промежуточной секции ложа, а электродвигатель для регулирования высоты подъема и опускания кровати соединен посредством болтового соединения с каркасом и с рычажной приводной опорой, являющейся сварным элементом основания подъема ложа, кроме того, устройство включает блок дистанционного управления с предустановленным программным обеспечением для дистанционного управления кроватью, причем блок дистанционного управления имеет два режима работы - режим настройки подключения и режим удаленного управления приводами, подключен к источнику питания и одновременно подключен проводным соединением к стационарному блоку управления, преобразующему сигнал с блока дистанционного управления в рабочее напряжение для электродвигателей с приведением их в линейное движение, причем стационарный блок управления имеет индивидуальные для каждого из электродвигателей разъемы для проводного соединения, разъем для подключения дистанционного блока управления проводным соединением, а также имеет подключение к источнику питания напряжением 220 В, при этом на кровати в зоне доступа пациента размещено мобильное устройство с предустановленным программным обеспечением для управления функциями кровати, а мобильное устройство и блок дистанционного управления подключены к одной доступной WiFi сети.
2. Медицинская кровать по п.1, отличающаяся тем, что на каркасе также закреплен стационарный пульт управления, подключенный к дистанционному блоку управления проводным соединением с возможностью управления функциями медицинской кровати стационарно.
3. Медицинская кровать по п.1, отличающаяся тем, что мобильное устройство выполнено в виде планшетного компьютера или смартфона.
4. Медицинская кровать по п.1, отличающаяся тем, что содержит крепления для капельницы, крепление для установки стойки подтягивания пациента, спинки, отверстия, закрытые пластиковыми заглушками для установки поручней.
| РЕАБИЛИТАЦИОННАЯ КИНЕТИЧЕСКАЯ СИСТЕМА ДЛЯ ОБЕЗДВИЖЕННЫХ БОЛЬНЫХ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ | 2012 |
|
RU2490002C1 |
| ФУНКЦИОНАЛЬНАЯ МЕДИЦИНСКАЯ КРОВАТЬ (ВАРИАНТЫ) | 2010 |
|
RU2447872C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ОПЕРАЦИОННЫМ СТОЛОМ | 2014 |
|
RU2675442C2 |
| WO 2006106607 A1, 12.10.2006 | |||
| ТЕПЛООБМЕННАЯ ТРУБА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2012 |
|
RU2561802C1 |
| AU 2011232780 A1, 26.04.2012 | |||
| WO 2001047340 A2, 05.07.2001 | |||
| US 20080155750 A1, 03.07.2008 | |||
| US 20180338625 A1, 29.11.2018. | |||

