Заявленное изобретение относится к методу определения скорости и ускорения подвижных объектов (транспортных средств и т.п.) по измерениям взаимного положения зональных изображений на комплексированных материалах панхроматической и многоспектральной съемки (паншарпенинг) [1], с учетом расположения оптико-электронных преобразователей спектральных каналов друг относительно друга в фокальной плоскости целевой съемочной аппаратуры космического комплекса.
Из уровня техники известны различные способы оценки параметров движения подвижных объектов, в частности известен, выбранный в качестве наиболее близкого аналога, способ определения параметров движения наблюдаемого с космического аппарата ледника (см. RU 2643224C2, опубл. 31.01.2018), включающий съемку с космического аппарата ледника и неподвижных характерных наземных точек в моменты, взятые через задаваемый промежуток времени. Далее определяют скорость движения фронтальной части ледника по получаемым изображениям. Дополнительно выполняют две или более съемки ледника и характерных точек вокруг ледника через отсчитываемое от момента выполнения предшествующей съемки ледника время, взятое из заранее рассчитанного диапазона значений. По полученным изображениям определяют расстояния от характерных наземных точек до фронтальной части ледника, по которым определяют скорость, ускорение и производную ускорения движения фронтальной части ледника.
Несмотря на схожесть задач оценки параметров движения подвижного объекта, специфика определения перемещения ледника и подвижных объектов (например, транспортных средств), в связи с отличающимися значениями скорости движения, разная. Поэтому возможно только формальное сравнение данных объектов с выявлением их схожести в том, что оценку параметров движения в том и в другом случае производят посредством космической съемки.
Техническим результатом заявленного изобретения является повышение точности определения скорости и ускорения подвижных объектов (транспортных средств).
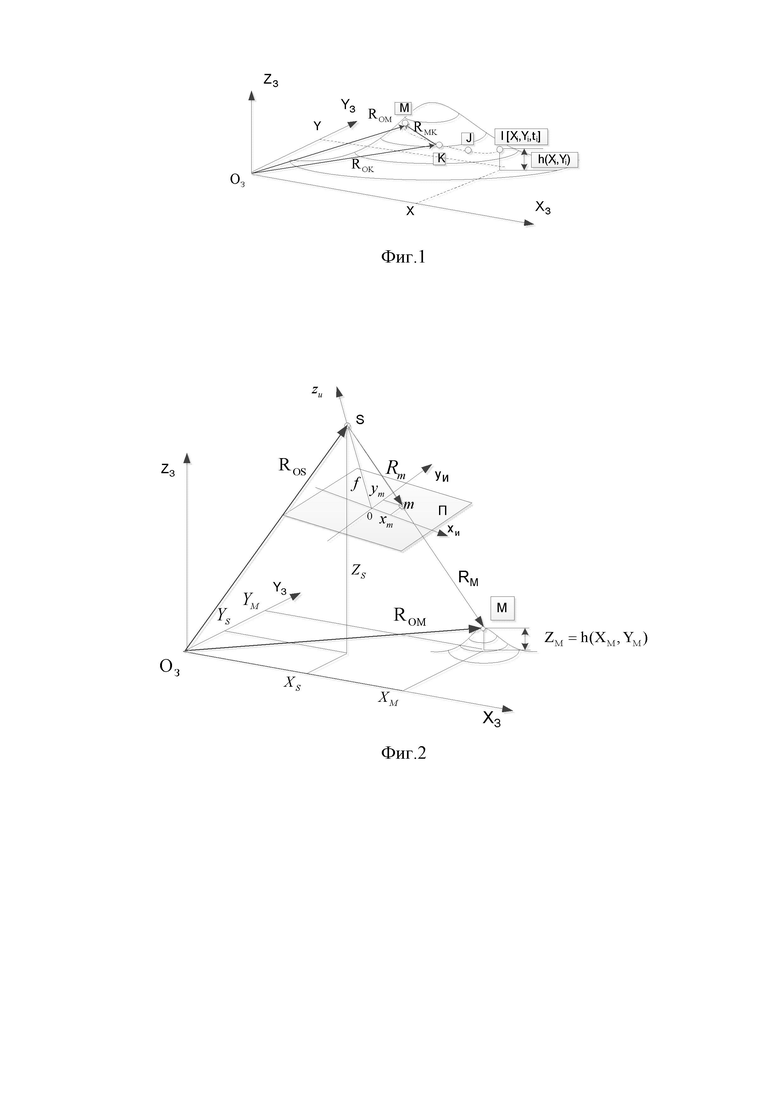
Технический результат достигается посредством создания способа оценки параметров движения подвижных объектов по результатам космической зональной съемки, включающий синхронную панхроматическую и многоспектральную съемку в одном маршруте, комплексирование данных указанных съемок, нахождение скорости и ускорения объекта относительно подстилающей поверхности посредством выделения множества точек траектории движения объекта  , количество которых определяется числом спектральных диапазонов, используемых при формировании комплексированного изображения, нахождение положения подвижного объекта в прямоугольной системе координат, связанной с поверхностью Земли в моменты времени фиксирования его на различных спектральных каналах целевой аппаратуры КК ДЗЗ. При этом для каждого объекта известны его координаты X, Y, h(X,Y) и время съемки t (фиг.1).
, количество которых определяется числом спектральных диапазонов, используемых при формировании комплексированного изображения, нахождение положения подвижного объекта в прямоугольной системе координат, связанной с поверхностью Земли в моменты времени фиксирования его на различных спектральных каналах целевой аппаратуры КК ДЗЗ. При этом для каждого объекта известны его координаты X, Y, h(X,Y) и время съемки t (фиг.1).
Измерителем координат точек выступает ЦА КК ДЗЗ. На фотограмметрической модели целевой аппаратурой космического комплекса дистанционного зондирования Земли точку M области объектов проецируют в точку m фокальной плоскости, координаты точки M определяют в системе координат OзXзYзZз, координаты точки m – в связанной с целевой аппаратурой системе OXиYиZи, плоскость OXиYи которой расположена в фокальной плоскости, а ось OZи проходит через центр проектирования S целевой аппаратуры КК ДЗЗ (фиг.2) [2].
Заявленное изобретение проиллюстрировано следующими схемами:
Фиг. 1 – траектория движения подвижного объекта относительно подстилающей поверхности;
Фиг. 2 – фотограмметрическая модель целевой съемочной аппаратуры;
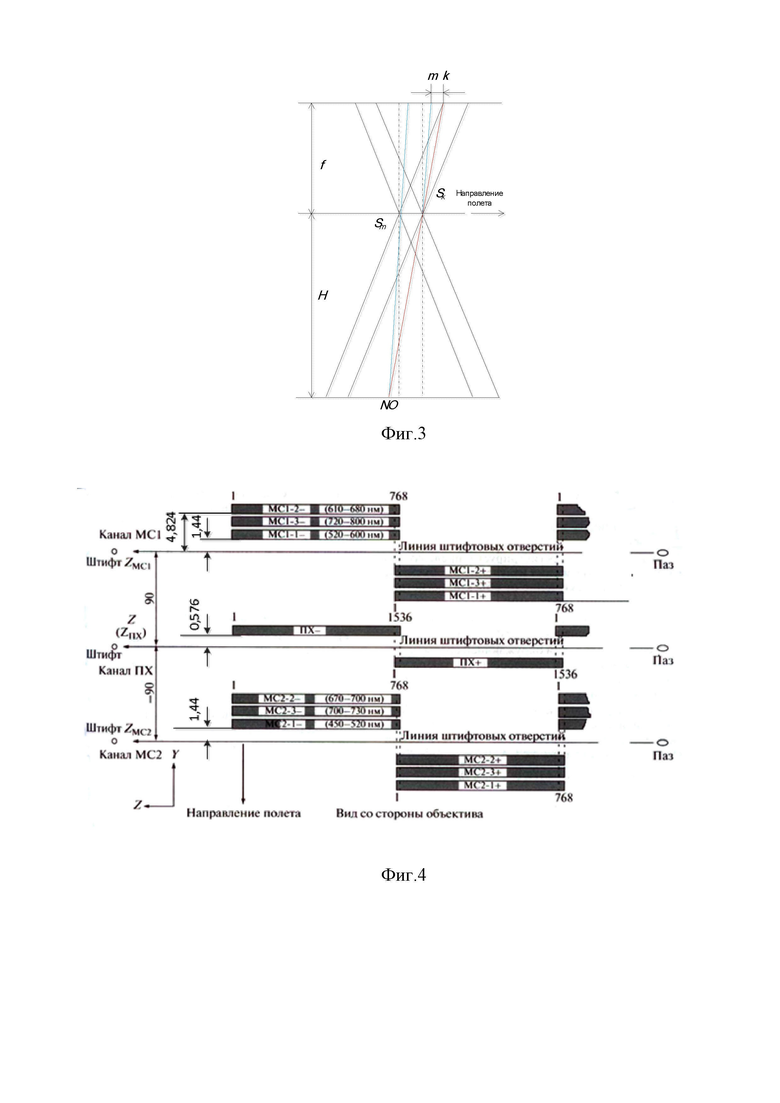
Фиг. 3 – отображение точки NO в точках фокальной плоскости m и k при плановой съемке для двух спектральных каналов;
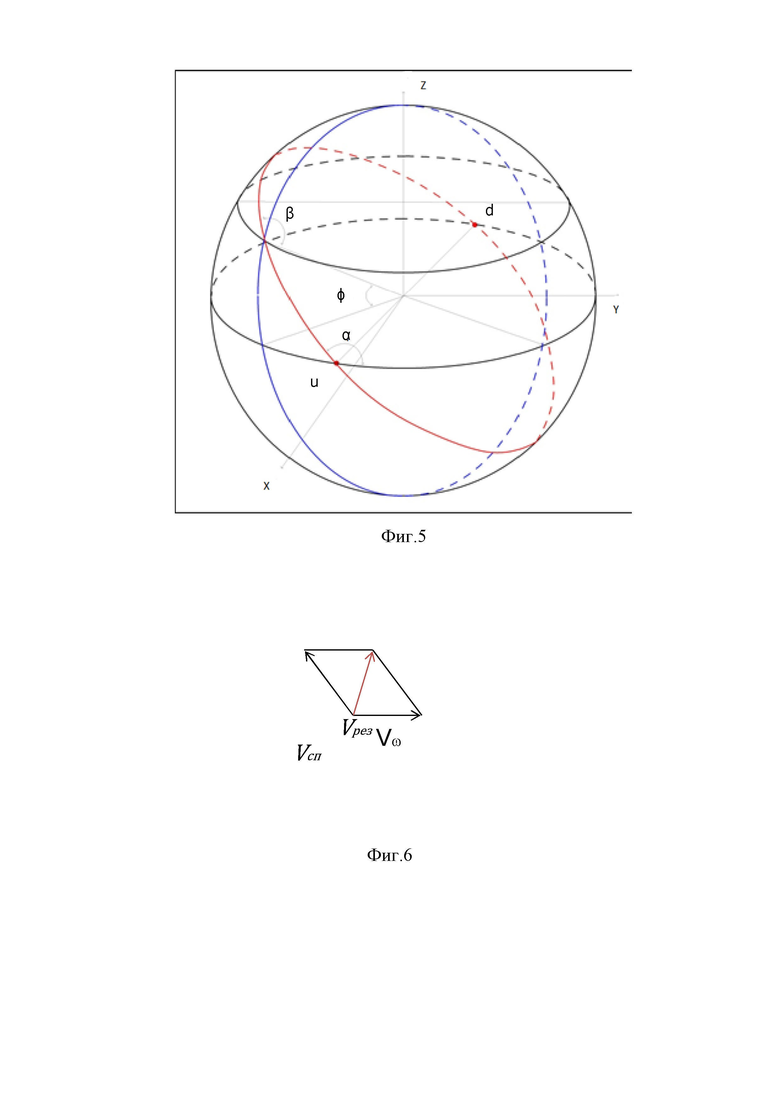
Фиг. 4 – расположение ОЭП в фокальной плоскости ЦА «Геотон-Л1» КК ДЗЗ «Ресурс-П»;
Фиг. 5 – траектория полета КА в системе координат связанной с Землей;
Фиг. 6 – определение результирующей скорости Vрез КА относительно поверхности Земли;
Фиг. 7 – получение цветного изображения объектов с подчеркнутыми деталями, содержащего неподвижные и подвижные объекты;
Фиг. 8 – участок комплексированного изображения аэродрома Райт-Паттерсон с автомобилями на автотрассе;
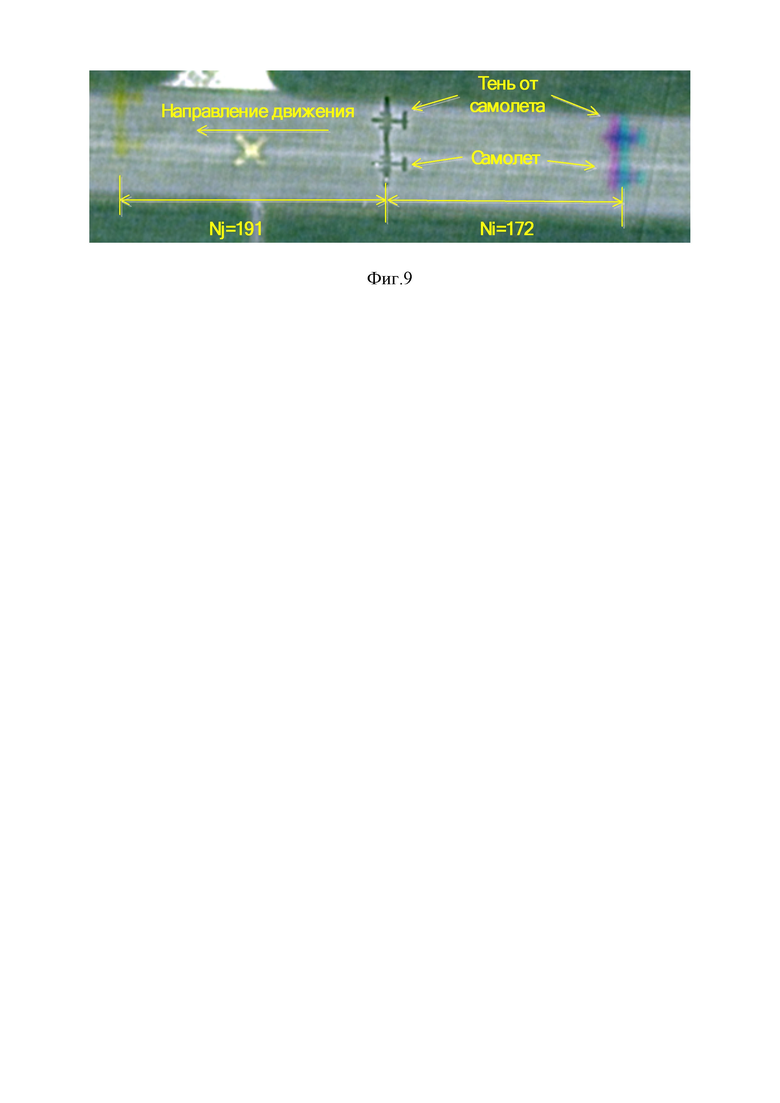
Фиг. 9 – участок комплексированного изображения аэродрома Райт-Паттерсон с взлетающим самолетом на взлетно-посадочной полосе.
Заявленный способ оценки параметров движения подвижных объектов по результатам космической зональной съемки осуществляется следующим образом.
При дистанционном зондировании Земли (ДЗЗ) космическими комплексами (КК) одной из задач является определение параметров движения подвижных объектов для оценки загрузки дорог, интенсивности транспортного потока и др. Рассмотрим случай съемки объектов целевой аппаратурой (ЦА) в одном сеансе в различных спектральных диапазонах [1] по которым, в том числе, осуществляется комплексирование материалов панхроматической и многоспектральной съемки (паншарпенинг). Синтез комплексированного изображения производится путем совмещения одноименных неподвижных контуров изображений различных спектральных каналов. Поэтому на комплексированном изображении каждый неподвижный объект отображается однократно, а подвижный объект – в нескольких зонах комплексированного изображения за счет съемки в различные моменты времени. Что, с одной стороны является артефактом, с другой – позволяет найти параметры движения объектов.
Движение подвижного объекта относительно подстилающей поверхности происходит по некоторой траектории (фиг. 1), с точками I, J, K, M (количество точек определятся числом спектральных диапазонов). Положение объекта в точках фиксируется целевой аппаратурой космического комплекса дистанционного зондирования Земли (ЦА КК ДЗЗ). С поверхностью Земли связана прямоугольная система координат OзXзYзZз. Для каждого положения объекта известны его координаты X, Y, h(X,Y) и время съемки t. Подстилающая поверхность плоская или известна ее цифровая модель рельефа (ЦМР). Требуется найти скорости и ускорения движения подвижного объекта относительно подстилающей поверхности с использованием комплексированных материалов панхроматической и многоспектральной съемки.
С каждой точкой траектории связан радиус – вектор, проходящий через начало координат. Переход из предыдущей в последующую точку характеризуется вектором (участком траектории).
Например, для точек K и M:
Пусть I начальная точка движения. Тогда
где 



Система уравнений (1) может быть решена для различных условий движения подвижного объекта и космической съемки (по плоскости, в трехмерном пространстве).
В качестве измерителя координат подвижного объекта выступает ЦА КК ДЗЗ.
Фотограмметрическая модель ЦА КК ДЗЗ представлена на фиг. 2 [2]. Точка M области объектов проецируется в точку m фокальной плоскости. Координаты точки M определяются в системе координат OзXзYзZз, координаты точки m – в связанной с ЦА системе OXиYиZи, плоскость OXиYи которой расположена в фокальной плоскости, а ось OZи проходит через центр проектирования S целевой аппаратуры КК ДЗЗ. Связь координат точек M и m определяется системой уравнений (2).
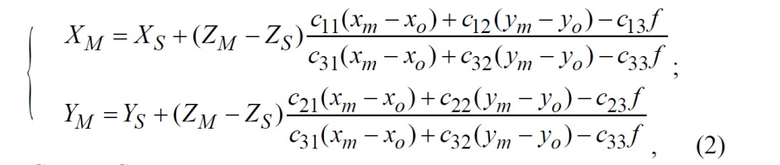
где С11,…., С33 – элементы матрицы направляющих косинусов, связывающих системы координат OзXзYзZз и OXиYиZи через углы разворота по тангажу, крену и курсу;
f – фокусное расстояние ЦА КК ДЗЗ;

По измерениям координат точек на изображении и элементам внешнего и внутреннего ориентирования ЦА КК ДЗЗ уравнения (2) позволяют найти координаты точек подвижных объектов, затем по системе уравнений (1) – определить параметры движения подвижных объектов.
Для проверки возможности решения поставленной задачи рассмотрим случай определения скорости и ускорения по плановому комплексированному изображению ЦА «Геотон-Л1» КК ДЗЗ «Ресурс-П» при прямолинейном движении объектов.
Определение параметров при прямолинейном движения объектов
При космической съемке многоспектральной оптико-электронной аппаратурой «Геотон» космического аппарата (КА) «Ресурс-П» [5] один и тот же неподвижный объект NO на земной поверхности фиксируются в оптико-электронных преобразователях (ОЭП) спектральных каналов в различные моменты времени (пример отображения объекта NO в точках фокальной плоскости m и k при плановой съемке для двух спектральных каналов представлен на фиг. 3).
Временное различие обусловлено орбитальным движением и конструкцией целевой аппаратуры (ЦА), которая представляет собой оптическую систему центральной проекции, в фокальной плоскости которой расположены зональные мультиспектральные (МС1-1, МС1-2, МС1-3, МС2-1, МС2-2, МС2-3) и панхроматический (ПХ) ОЭП оптического излучения
(фиг. 4).
При выполнении космической съемки для создания цветного изображения используются ОЭП чувствительные в красной, зеленой и синей зонах видимого излучения (МС1-2, МС1-1, МС2-1, соответственно).
Для получения цветного изображения с подчеркнутыми деталями, улучшающими визуальное восприятие цветного изображения используется процесс объединения пространственной области изображения с высоким разрешением (обычно панхроматического) и изображений с низким разрешением (обычно мультиспектральных) [3]. Один из вариантов реализации заключается в объединении цветного и панхроматического изображений (добавляется ПХ зона). При этом изображения в панхроматическом канале совмещаются с изображениями в синем, красном и зеленых каналах.
Рассмотрим частный случай – плановую съемку ЦА, в процессе которой ОЭПы перпендикулярны направлению результирующей скорости КА, а подвижные объекты двигаются по горизонтальной поверхности. Для расчета результирующей скорости КА рассмотрим траекторию полета КА в системе координат связанной с Землей (фиг. 5) и ориентацию составляющих – скорости КА при орбитальном движении Vсп и скорости за счет вращения поверхности Земли Vω на широте расположения объекта (фиг. 6).
Траектория полета характеризуется следующими угловыми величинами:
(π/2-β) – азимутом проекции солнечно синхронной орбиты КА на поверхность Земли;
α – наклонением плоскости орбиты КА к плоскости экватора; φ – широтой расположения объекта съемки. Угол β рассчитывается по формуле (1) [6]:

Результирующая скорость Vрез КА рассчитывается по теореме косинуcов.
Скорость движения изображения Vси относительно фокальной плоскости определяется из формулы (см. фиг. 3):


где Δt – время, за которое точка изображения проходит расстояние mk;
H – высота съемки.
Задавая значения mk между ОЭП находим промежутки времени, за которые изображения неподвижных относительно земной поверхности объектов перемещаются между ОЭП.
Кроме того, при съемке могут присутствовать подвижные объекты. Такие объекты перемещаются относительно неподвижных.
На фиг. 7 представлены модели изображений. Для наглядности объекты на земной поверхности приведены по масштабу к их изображениям. Масштаб съемки определяется отношением фокусного расстояния ЦА к высоте съемки f/H. При создании цветного изображения объектов с подчеркнутыми деталями неподвижные объекты совмещаются, а подвижные объекты представляют собой зональные изображения, наложенные на изображения неподвижных объектов.
Взаимное расположение зональных изображений позволяет определить направление движения объекта и его параметры – скорость и ускорение.
Признаком наличия движения объекта в общем случае является наличие четырех изображений объекта на комплексированном изображении. Направление движения совпадает с направлением от панхроматического изображения к изображению в синей зоне (МС2-1).
Первоначальное направление движения объекта совпадает с направлением от изображения в красной (МС1-2) и зеленой (МС1-1) зонах к панхроматическому изображению.
В зависимости от тона объекта в ПХ зоне (светлого или темного) зональные изображения на объединенном изображении могут иметь различные цвета в соответствии с законами образования цветов (таблица 1). Примеры изображений представлены на фиг. 8 и 9.
Возможны и другие сочетания цветов на изображениях подвижных объектов, которые зависят от цветов неподвижного фона и подвижного объекта.
Зная расстояния между соответствующими элементами ОЭП (фиг. 4) и скорость движения изображения определяем промежутки времени, через которые начинает формироваться изображение в соседней зоне (см. таблица 2).
Таким образом, период времени, в течение которого образуются изображения одних и тех же объектов в разных спектральных зонах составляет менее 3 с.
Примем, что за этот период времени параметры полета КК ДЗЗ не меняются.
Рассмотрим случай прямолинейного равноускоренного движения подвижного объекта (фиг. 7).
Таблица 1 – Цвет подвижного объекта на цветном изображении
Таблица 2 – Определение промежутков времени, через которые начинает формироваться изображение в соседней зоне
Примечание: Условия съемки – Аэродром Райт-Паттерсон; 39,5 град., С.Ш.; Vрез = 7,4495 км/с; Vсп = 7,6993 км/с; угловая скорость вращения Земли Ωз = 0,000073 (рад/с); радиус Земли Rз = 6371 (км); Vω = 0,3589 км /с.; Vси = 62,079 мм/с.
Решим задачу через параметры движения изображений объекта. Найдем начальную и конечную скорости движения изображения объекта и его ускорение.
Средняя скорость изображения подвижного объекта 
 на участке
на участке 
 (5)
(5)
с другой стороны: 
где V0 – начальная скорость изображения подвижного объекта на участке Li;
a – ускорение изображения подвижного объекта на участке
Средняя скорость подвижного объекта 

где d – размер элемента ОЭП; Ni – количество элементов ОЭП на участке

Аналогично определяется средняя скорость подвижного объекта 

Составим систему уравнений для участков 
Начальная скорость и ускорение подвижного объекта определяются выражениями (9):


Оценим относительные средние квадратические отклонения (СКО) определения начальной скорости и ускорения подвижного объекта. Будем считать, что при определении Ni и Nj погрешность распределена по равномерному закону, в этом случае [4]:
СКО Ni = СКО Ni = 1/(2∙30,5)
Относительные частные производные начальной скорости и ускорения подвижного объекта по Ni и Nj равны (10) и (11):


Результаты расчета относительных СКО определения начальной скорости и ускорения подвижного объекта приведены в таблице 3.
Таблица 3 Оценка относительных СКО определения начальной скорости и ускорения подвижного объекта
Анализ расчетов показывает, что начальная скорость определяется с СКО менее 10% при величине более 2 м/с (7,2 км/час), а ускорение – с СКО менее 10% при величине более 2 м/с2.
Выполнены оценки скорости и ускорения транспортных средств по комплексированному изображению аэродрома Райт-Паттерсон, сформированному с использованием программного комплекса OrthoNormScan-VS 2.0.0.2 (ФГБОУ ВПО «РГРТУ» от 09.09.14). Для определения количества элементов изображения между зональными изображениями подвижных объектов использован ПК КВИР (ОАО «НИИ ТП» от 20.11.15).
Для выполнения расчетов можно использовать программные средства общего доступа – электронные таблицы Excel или подобные.
Результаты представлены на фиг. 8, 9 и в таблице 4. Оценки скорости и ускорения транспортных средств соответствуют ожидаемым.
Таблица 4 Оценка параметров движения транспортных средств по комплексированному изображению аэродрома Райт-Паттерсон
Таким образом, предложенный способ позволяет решить задачу определения параметров движения подвижных объектов при дистанционном зондировании Земли (ДЗЗ) космическими комплексами (КК) для оценки загрузки дорог, интенсивности транспортного потока и др.
Список литературы
Монографии:
1. Современные технологии обработки данных дистанционного зондирования Земли, под редакцией Еремеева В.В., М., Физматлит, 2015, стр. 244, 245.
2. Фотограмметрическая обработка материалов видовых средств дистанционного зондирования земли. Коваленко В.П., учебное пособие «Материалы лекций», издание ВВИА им. проф. Н.Е. Жуковского, 2003 г.
3. Дистанционное зондирование. Модели и методы обработки изображений, Шовенгердт Р.А.. Перевод с английского Кирюшина А.В., Демьянинкова А.И., М., Техносфера. 2010.
4. Вероятностные основы авиационного оборудования, Музалев Г.А., учебник, издание ВВИА им. проф. Н.Е. Жуковского, 1991.
Статьи из журналов и сборников:
5. Многоспектральная оптико-электронная аппаратура «Геотон» космического аппарата «Ресурс-П», Архипов С.А., Бакланов А.И., Исследование Земли из космоса, 2014, № 2.
6. Выбор орбит ИСЗ для круглосуточного глобального обзора Земли, Лукашевич Е.Л., Саульский В.К., Исследование Земли из космоса,1984. № 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКИЙ ТЕЛЕСКОП | 2012 |
|
RU2529052C2 |
| Космический комплекс дистанционного зондирования Земли высоко-детального уровня наблюдения наземных объектов | 2020 |
|
RU2753201C1 |
| Способ достижения дифракционного разрешения цветных изображений дистанционного зондирования Земли для малых космических аппаратов | 2023 |
|
RU2830525C1 |
| СПОСОБ ПОЛЕТНОЙ КАЛИБРОВКИ МУЛЬТИСПЕКТРАЛЬНОЙ АППАРАТУРЫ КОСМИЧЕСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2561231C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2492584C1 |
| Способ достижения дифракционного предела разрешения изображений дистанционного зондирования Земли для малых космических аппаратов | 2019 |
|
RU2730886C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| Многофункциональный наземный комплекс управления, приема и обработки информации | 2024 |
|
RU2828016C1 |
| Способ создания глобальной информационной среды в околоземном пространстве и многофункциональная космическая информационная система "Парадигма" на базе сети низкоорбитальных космических аппаратов для его осуществления | 2018 |
|
RU2707415C2 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ НАБЛЮДАЕМОГО С КОСМИЧЕСКОГО АППАРАТА ЛЕДНИКА | 2016 |
|
RU2650779C1 |

Изобретение относится к способу определения скорости и ускорения подвижных объектов (транспортных средств и т.п.) по измерениям взаимного положения зональных изображений на комплексированных материалах панхроматической и многоспектральной съемки с учетом расположения оптико-электронных преобразователей спектральных каналов относительно друг друга в целевой съемочной аппаратуре. Способ оценки параметров движения подвижных объектов по результатам космической зональной съемки включает зональную космическую панхроматическую и многоспектральную съемку, комплексирование данных указанных съемок, нахождение скорости и ускорения объекта относительно подстилающей поверхности посредством выделения точек траектории движения объекта I, J, K, M, количество которых определяется числом спектральных диапазонов. Затем осуществляют фиксацию целевой аппаратурой космического комплекса дистанционного зондирования Земли (ЦА КК ДЗЗ) положения объекта в точках, нахождение положения объекта в прямоугольной системе координат, связанной с поверхностью Земли, при этом для каждого объекта известны его координаты и время съемки, с каждой точкой траектории связан радиус–вектор, проходящий через начало координат, переход из предыдущей в последующую точку характеризуется вектором RMK. На фотограмметрической модели целевой аппаратурой космического комплекса дистанционного зондирования Земли точку M области объектов проецируют в точку m фокальной плоскости, координаты точки M определяют в системе координат OзXзYзZз, координаты точки m – в связанной с целевой аппаратурой системе OXиYиZи, плоскость OXиYи которой расположена в фокальной плоскости, а ось OZи проходит через центр проектирования S целевой аппаратуры КК ДЗЗ. Связь координат точек M и m определяется системой уравнений. По измерениям координат точек на изображении и элементам внешнего и внутреннего ориентирования ЦА КК ДЗЗ находят координаты точек подвижных объектов, затем определяют параметры движения подвижных объектов. Аппаратура космической зональной съемки космического комплекса дистанционного зондирования Земли для осуществления заявленного способа включает систему приема и преобразования информации, которая включает панхроматический оптико-электронный преобразователь и мультиспектральные оптико-электронные преобразователи, оптико-механический блок, состоящий из объектива и корпусной части с приборной рамой и иллюминатором, блок формирования изображения, состоящий из исполнительного механизма подфокусировки, блока светофильтров, блока калибровки, блок системы управления и межблочные кабели связи. Технический результат – повышение точности определения скорости и ускорения подвижных объектов. 2 н.п. ф-лы, 9 ил., 4 табл.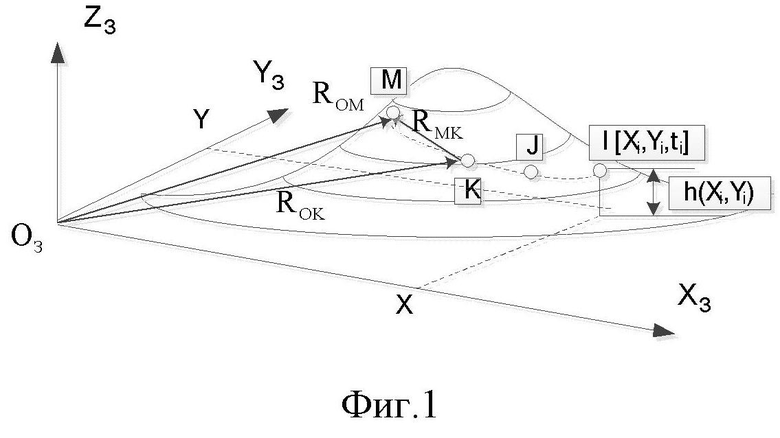
1. Способ оценки параметров движения подвижных объектов по результатам космической зональной съемки, включающий синхронную панхроматическую и многоспектральную космическую съемку в одном маршруте, комплексирование данных указанных съемок, нахождение скорости и ускорения объекта относительно подстилающей поверхности посредством выделения множества точек траектории движения объекта  , количество которых определяется числом спектральных диапазонов с учетом расположения оптико-электронных преобразователей спектральных каналов относительно друг друга в фокальной плоскости целевой съемочной аппаратуры космического комплекса, фиксацию целевой аппаратурой космического комплекса дистанционного зондирования Земли положения объекта в точках, нахождение положения объекта в прямоугольной системе координат, связанной с поверхностью Земли, при этом для каждого объекта известны его координаты X, Y, h(X,Y) и время съемки t, с каждой точкой траектории связан радиус–вектор, проходящий через начало координат, переход из предыдущей в последующую точку характеризуется вектором, для точек K и M:
, количество которых определяется числом спектральных диапазонов с учетом расположения оптико-электронных преобразователей спектральных каналов относительно друг друга в фокальной плоскости целевой съемочной аппаратуры космического комплекса, фиксацию целевой аппаратурой космического комплекса дистанционного зондирования Земли положения объекта в точках, нахождение положения объекта в прямоугольной системе координат, связанной с поверхностью Земли, при этом для каждого объекта известны его координаты X, Y, h(X,Y) и время съемки t, с каждой точкой траектории связан радиус–вектор, проходящий через начало координат, переход из предыдущей в последующую точку характеризуется вектором, для точек K и M:
пусть I начальная точка движения, тогда
где 



где С11, …, С33 – элементы матрицы направляющих косинусов, связывающих системы координат OзXзYзZз и OXиYиZи через углы разворота по тангажу, крену и курсу;
f – фокусное расстояние ЦА КК ДЗЗ;

по измерениям координат точек на изображении и элементам внешнего и внутреннего ориентирования целевой аппаратуры космического комплекса дистанционного зондирования Земли уравнения (2) находят координаты точек подвижных объектов, затем по системе уравнений (1) определяют параметры движения подвижных объектов.
2. Аппаратура космической зональной съемки космического комплекса дистанционного зондирования Земли для осуществления способа по п.1, включающая систему приема и преобразования информации, включающую панхроматический оптико-электронный преобразователь и мультиспектральные оптико-электронные преобразователи, оптико-механический блок, состоящий из объектива и корпусной части с приборной рамой и иллюминатором, блок формирования изображения, состоящий из исполнительного механизма подфокусировки, блока светофильтров, блока калибровки, блок системы управления и межблочные кабели связи.
| МНОГОЦЕЛЕВАЯ КОСМИЧЕСКАЯ СИСТЕМА | 2008 |
|
RU2360848C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ НАБЛЮДАЕМОГО С КОСМИЧЕСКОГО АППАРАТА ЛЕДНИКА | 2016 |
|
RU2643224C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2302698C2 |
| US 20180286052 A1, 04.10.2018 | |||
| WO 2008070542 A1, 12.06.2008. | |||

