Изобретение относится к радиотехнике и может использоваться для автоматического определения местонахождения подвижных объектов (ПО). Преимущественная область использования - осуществление оперативного контроля за местонахождением ПО и слежение за их передвижением.
Известна спутниковая система определения местонахождения подвижных объектов, содержащая К датчиков сигналов, N искусственных спутников земли, М наземных приемных пунктов информации, которые связаны с центром системы [1, с.64.]. Принцип определения координат датчика сигналов в этой системе основан на определении доплеровского смещения несущей частоты и решении навигационной задачи по трем измерениям [1, с.54] с учетом параметров орбит искусственных спутников Земли.
Основными недостатками этой системы являются: невысокая точность [1, с.71, с.77], зависящая от многих причин, например нестабильности частоты генератора датчика сигналов, уровня шумов, приведенных к входу приемного устройства, широты места и угла возвышения искусственного спутника Земли относительно датчика сигнала [2].
Известна система определения местонахождения подвижных объектов, которая содержит N блоков сигнализации, установленных на автомобилях, М приемных станций, образующих контрольные пункты, установленные стационарно в опорных точках с известными координатами, диспетчерскую станцию, К станций отображения информации. Каждый блок сигнализации содержит задающий генератор, блок формирования псевдослучайной последовательности (ПСП) и кодирования, датчики сигнализации, синтезатор несущей частоты, модулятор, усилитель мощности, антенно-фидерное устройство. Диспетчерская станция содержит антенно-фидерное устройство связи, аппаратуру связи, блок сопряжения, персональную электронно-вычислительную машину (ПЭВМ). Принцип действия системы основан на разностно-дальномерном методе с применением непрерывно излучаемых фазоманипулированных сигналов с большой базой, разнесенных в пространстве приемных пунктов и единой для системы шкалой времени [3].
Данная система имеет следующие недостатки:
- диспетчерская станция, приемные станции и подвижные объекты расположены на земле, а, следовательно, имеют ограниченный радиус действия, связанный с условиями прямой (оптической) видимости;
- диспетчерская станция связана со всеми М приемными станциями, которые не связаны между собой, что также уменьшает зону, обслуживаемую системой;
- станции отображения связаны с диспетчерской станцией односторонними связями, из-за этого оператор, наблюдающий ситуацию, оказывается не подключенным к процессу управления движением ПО;
- из-за отсутствия общей синхронизации в прототипе при большом количестве ПО будут наблюдаться коллизии (наложения радиосигналов от нескольких ПО), что приведет к искажению принимаемой информации и снижению достоверности оценки местонахождения ПО;
- в системе осуществляется только определение местонахождения ПО и отсутствует возможность слежения за ним.
Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей системы, а именно расширение зоны обслуживания ПО, повышение точности определения местонахождения ПО, наличие возможности управления движением ПО с диспетчерских станций и абонентов.
Это достигается тем, что в систему определения местонахождения подвижных объектов (ПО), содержащую блоки сигнализации, установленные на ПО, станции приема радиосигналов сигнализации, диспетчерскую станцию и станции отображения информации, причем станции приема радиосигналов сигнализации, размещенные в опорных точках с определенными координатами, связаны с диспетчерской станцией дуплексной радиосетью, введена центральная станция, соединенная двусторонними связями через С наземных систем передачи данных с С региональными подсистемами определения местонахождения подвижных объектов, каждая из которых состоит из блоков сигнализации, установленных на ПО, станций приема радиосигналов сигнализации, диспетчерской станции и станций отображения информации, причем в каждой региональной подсистеме станции приема радиосигналов сигнализации, размещенные в опорных точках с определенными координатами, связаны с соответствующей диспетчерской станцией дуплексной радиосетью, диспетчерская станция связана двусторонними связями со станциями отображения информации, станции приема радиосигналов сигнализации по радиоканалам связаны двусторонними связями с ПО, находящимися в зоне действия системы, первая (обозначенная условно) региональная подсистема связана через последовательно соединенные двусторонними связями (С-1)-у наземную систему передачи данных и (С-2)-е региональные подсистемы с С-й региональной подсистемой, станции приема радиосигналов сигнализации связаны двусторонними связями с блоками сигнализации, установленными на ПО, вход-выход центральной станции является входом-выходом системы.
Каждый блок сигнализации содержит задающий генератор, блок формирования псевдослучайной последовательности и кодирования, датчики сигнализации, синтезатор несущей частоты, модулятор, усилитель мощности, антенно-фидерное устройство, первый выход задающего генератора связан с синтезатором несущей частоты, выход которого соединен с первым входом преобразователя частоты, выход модулятора соединен со вторым входом преобразователя частоты, второй вход модулятора через элемент И соединен с выходом блока формирования псевдослучайной последовательности и кодирования, два входа которого соединены соответственно со вторым выходом задающего генератора и выходом датчиков сигнализации, а выход преобразователя частоты через последовательно соединенные усилитель мощности и высокочастотную развязку подключен к передающему антенно-фидерному устройству, второй выход усилителя мощности соединен с первым входом приемника, второй вход приемника подключен к выходу высокочастотной развязки, выход датчиков сигнализации подключен также к первому входу вычислительного блока, а ко второму входу - выход приемника, к третьему входу - выход элемента И, первый выход вычислительного блока подключен к регистрирующему устройству, а второй выход - ко второму входу элемента И.
Каждая станция приема радиосигналов сигнализации выполнена в виде последовательно соединенных антенно-фидерного устройства, высокочастотной развязки, приемника сигналов, вычислительного блока, а также блока управления, выход которого двухсторонними связями соединен с входом-выходом вычислительного блока, а второй вход-выход вычислительного блока соединен с аппаратурой связи, кроме того, она содержит задающий генератор, блок формирования псевдослучайной последовательности и кодирования, синтезатор несущей частоты, модулятор, усилитель мощности, антенно-фидерное устройство, первый выход задающего генератора связан с синтезатором несущей частоты, выход которого соединен с первым входом преобразователя частоты, выход модулятора соединен со вторым входом преобразователя частоты, второй вход модулятора через элемент И соединен с выходом блока формирования псевдослучайной последовательности и кодирования, два входа которого соединены соответственно с вторым выходом задающего генератора и выходом приемника сигналов глобальной навигационной спутниковой системы, а выход преобразователя частоты через последовательно соединенные усилитель мощности и высокочастотную развязку подключен к антенно-фидерному устройству, второй выход усилителя мощности соединен с первым входом приемника, второй вход приемника подключен к выходу высокочастотной развязки, выход приемника сигналов глобальной навигационной спутниковой системы подключен также к первому входу вычислительного блока, а ко второму входу - выход приемника, к третьему входу - выход элемента И, первый выход вычислительного блока подключен к регистрирующему устройству, а второй выход - ко второму входу элемента И.
Каждая диспетчерская станция содержит аппаратуру связи с входами-выходами, двусторонне соединенную с персональной электронно-вычислительной машиной (ПЭВМ), блок управления двусторонними связями также соединен с ПЭВМ, приемник сигналов глобальной навигационной спутниковой системы, выход которого подключен к входу ПЭВМ.
Каждая станция отображения информации содержит аппаратуру связи с входами-выходами, вход-выход которой соединен с первым входом-выходом первого блока сопряжения, двусторонне соединенного с ПЭВМ, приемник сигналов глобальной навигационной спутниковой системы, выход которого подключен к входу ПЭВМ.
Центральная станция содержит С комплектов аппаратуры связи с соответствующими входами-выходами, каждый из которых двусторонними связями соединен с блоком распределения сообщений, который в свою очередь двусторонними связями соединен с ПЭВМ, второй блок сопряжения с входами-выходами двусторонними связями также соединен с ПЭВМ, к входу которой подключен приемник сигналов глобальной навигационной спутниковой системы.
На фиг.1 представлена структурная схема системы определения местоположения подвижных объектов; на фиг.2 - вариант реализации блока сигнализации; на фиг.3 - вариант реализации диспетчерской станции; на фиг.4 - вариант реализации приемной станции, образующей контрольный пункт; на фиг.5 - вариант реализации станции отображения информации, на фиг.6 - вариант реализации центральной станции 7, на фиг.7 - один из вариантов реализации аппаратуры 29 связи с входами-выходами 30 и аппаратуры 37 связи с входами-выходами 38 диспетчерской станции 3 в случае использования мобильных приемных станций 2.
Система определения местонахождений подвижный объектов содержит блоки сигнализации 12, 1N, ..., 1n, ..., 1D, установленные на ПО, приемные станции 21, 22, ..., 2М, образующие контрольные пункты, установленные стационарно в опорных точках или мобильные с известными координатами, диспетчерскую станцию 3, станции отображения информации 41, 42, ..., 4К. Эти устройства содержатся в 1-й (обозначенной условно) региональной подсистеме 51 и других региональных подсистемах 52, ..., 5С. Отличие региональных подсистем 5 заключается только в числе обслуживаемых подвижных объектов, снабженных блоками сигнализации 11, 12, 1N, ..., 1n, ..., 1D, причем N≪n≪D. Через С наземных систем 6 передачи данных центральная станция 7 соединена с С региональными подсистемами 5 определения местонахождения подвижных объектов.
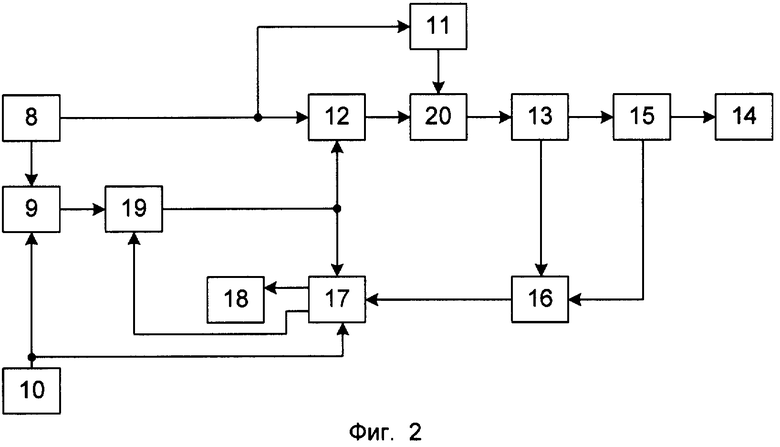
Каждый блок 1 сигнализации содержит задающий генератор 8, блок 9 формирования псевдослучайной последовательности (ПСП) и кодирования, датчики 10 сигнализации, синтезатор 11 несущей частоты, модулятор 12, усилитель 13 мощности, антенно-фидерное устройство 14, высокочастотную развязку 15, приемник 16, вычислительный блок 17, блок 18 регистрации, элемент И 19, преобразователь частоты 20.
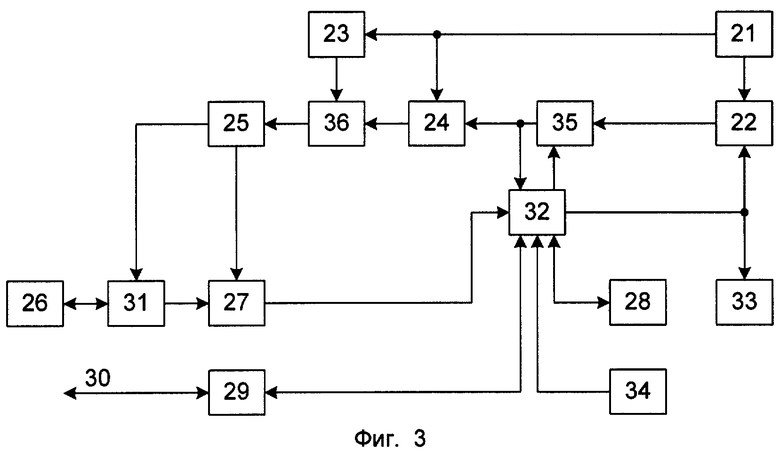
Каждая приемная станция 2 содержит задающий генератор 21, блок 22 формирования псевдослучайной последовательности и кодирования, синтезатор 23 несущей частоты, модулятор 24, усилитель 25 мощности, антенно-фидерное устройство 26, приемник 27, блок 28 управления, аппаратуру 29 связи с входами-выходами 30, высокочастотную развязку 31, вычислительный блок 32, блок 33 регистрации, приемник 34 сигналов глобальной навигационной спутниковой системы, элемент И 35, преобразователь частоты 36.
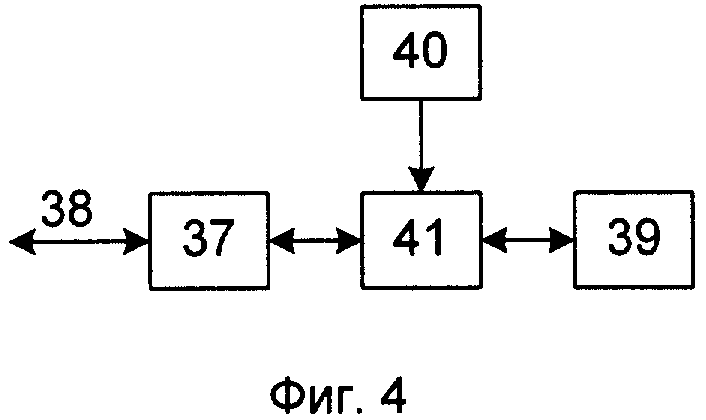
Диспетчерская станция 3 содержит аппаратуру 37 связи с входами-выходами 38, блок 39 управления, приемник 40 сигналов глобальной навигационной спутниковой системы, ПЭВМ 41.
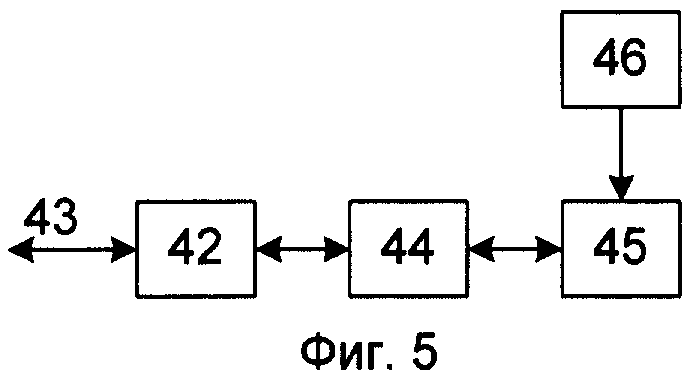
Каждая станция 4 отображения информации содержит аппаратуру 42 связи с входами-выходами 43, первый блок 44 сопряжения, персональную электронно-вычислительную машину 45, приемник 46 сигналов глобальной навигационной спутниковой системы.
Центральная станция 7 содержит аппаратуру 471, ..., 47с связи с соответствующими входами-выходами 48, блок 49 распределения сообщений, ПЭВМ 50, второй блок 51 сопряжения с входами-выходами 52, приемник 53 сигналов глобальной навигационной спутниковой системы.
В случае использования мобильных приемных станций 2 в состав аппаратуры 29 связи с входами-выходами 30 и аппаратуры 37 связи с входами-выходами 38 диспетчерской станции 3 входят антенно-фидерное устройство 54, высокочастотная развязка 55, приемник 56, синтезатор 57 несущей частоты, усилитель 58 мощности, преобразователь частоты 59 (фиг.7). Сущность работы системы заключается в следующем. Подвижные объекты с блоками 1 сигнализации, находящиеся в зоне действия одной из региональных подсистем 5 через контрольные пункты, установленные стационарно в опорных точках или мобильные с известными координатами, благодаря приему и обработке сигналов глобальной навигационной спутниковой системы, диспетчерскую станцию 3 обмениваются информацией с соответствующей станцией отображения информации 41, 42, ..., 4К. Каждая диспетчерская станция 3 через соответствующие наземные системы 6 передачи данных связана с центральной станцией 7 и соседними диспетчерскими станциями 3. Благодаря связям с С региональными подсистемами 5 определения местонахождения подвижных объектов на центральной станции 7 имеется полная картина о всех ПО, находящихся в зоне действия системы. Этим могут воспользоваться получатели информации, подключенные к выходу центральной станции 7. Общая синхронизация объектов системы во времени (привязка к глобальному (всемирному) времени) обеспечивается с помощью обработки сообщений с выхода приемников 34, 40, 50, 57 сигналов глобальной навигационной спутниковой системы и аналогичных приемников, входящих в состав датчиков 10 сигнализации подвижного объекта.
Работа системы определения местонахождения подвижных объектов заключается в следующем. Всем ПО, которые могут появиться в зоне действия системы, назначаются индивидуальные номера. Эти номера полностью определяют технические характеристики и эксплуатационные возможности ПО, например тип ПО, допустимые параметры движения и другие. Кроме того, назначаются общие рабочие частоты для радиоканалов обмена данными между блоками 1 сигнализации подвижных объектов, находящихся в зоне действия системы, частоты приема сигналов глобальной навигационной спутниковой системы, частоты систем радиосвязи между объектами системы определения местонахождения подвижных объектов. На все вычислительные блоки 17 ПО и вычислительные блоки 33 приемных станций 21, 22, ..., 2М, ПЭВМ 41 диспетчерских станций 3, ПЭВМ 45 станций отображения информации 41, 42, ..., 4К и ПЭВМ 50 центральной станции 7 устанавливается соответствующее программное обеспечение, в которое вместе с указанными выше процедурами заложены алгоритмы обмена данными, форматы передаваемых сообщений, выделенные для обмена данными временные интервалы и другие необходимые процедуры.
Перед началом движения на каждом ПО включается блок сигнализации 1, при этом задающий генератор 8, соединенный с модулятором 12, вырабатывает опорную частоту для синтезатора 11 несущей частоты, соединенного с преобразователем частоты 20. На другой вход модулятора 12 через элемент И 19 поступает синхронизированный с частотой задающего генератора 8 сигнал с блока 9 формирования ПСП и кодирования. Блок 9 формирования ПСП и кодирования модулирует вырабатываемый в нем ПСП сигнал индивидуальным номером и кодом состояния датчиков 10 сигнализации. В состав датчиков 10 сигнализации входят приемники сигналов глобальной навигационной спутниковой системы, обеспечивающие получение оценки точного местонахождения ПО и привязку к единому для системы глобальному (всемирному) времени с точностью до долей микросекунды [4]. Вычисленные координаты ПО накладываются на введенную в вычислительный блок 17 карту местности или города и передаются для отображения в блоке 18 регистрации в реальном времени совместно с дополнительной информацией, связанной с индивидуальным номером блока 1 сигнализации и состоянием его датчиков. В состав датчиков 10 могут входить также, например, пульты (кнопки, сенсоры и другие узлы), с помощью которых с ПО можно обратится к одному из абонентов системы. Это позволит организовать в системе обмен данными о местонахождении подвижных объектов или другими, получить необходимую в пути справочную информацию практически в реальном масштабе времени с привязкой к точному единому всемирному времени.
С выхода модулятора 12 фазоманипулированная несущая через преобразователь частоты 20 поступает на усилитель 13 мощности, выход которого через высокочастотную развязку 15 соединен с антенно-фидерным устройством 14, излучающим радиосигнал в эфир. Высокочастотная развязка 15 в простейшем случае может представлять собой, например, делитель мощности или частото-развязывающий диплексер при работе блока сигнализации 1 на двух рабочих частотах (передачи и приема). Радиосигналы с приемных станций 21, 22, ..., 2м принимаются антенно-фидерным устройством 14 и через высокочастотную развязку 15 передаются в приемник 16, в котором осуществляется фильтрация от внеполосных помех, усиление и перенос фазоманипулированного радиосигнала в низкочастотную область. Для защиты входных цепей приемника при излучении радиосигнала с усилителя 13 мощности выдается на приемник 16 сигнал бланкирования.
С выхода приемника 16 сигнал поступает в вычислительный блок 17, в котором известными методами [4, 5, 6] осуществляется обнаружение кодовых посылок, которые относятся к соответствующему ПО, контроль данных, передаваемых с блока 9 формирования ПСП и кодирования через элемент И 19, расчет его параметров движения ПО, запись и формирование сообщений для отображения (при необходимости) информации с датчиков 10 сигнализации и с приемника 16, слежение за траекторией движения, в том числе соседних ПО. Приведенные к выбранному формату данные, обработанные в вычислительном блоке 17, передаются для отображения в блоке 18 регистрации. Выбор интервала времени для передачи кодовых посылок через элемент И 19 или в заданный момент времени с привязкой к единому глобальному времени осуществляется в вычислительном блоке 17 в зависимости от выбранного в системе режима работы: по запросу или с доступом для обмена данными в определенный интервал времени.
Радиосигнал с блока сигнализации 1 ПО принимается антенно-фидерными устройствами 26 приемных станций 21, 22, ..., 2м и через высокочастотную развязку 31 передается в приемник 27, в котором осуществляется фильтрация от внеполосных помех, усиление и перенос спектра фазоманипулированного радиосигнала в низкочастотную область. Для защиты входных цепей приемника при излучении радиосигнала с усилителя 25 мощности выдается на приемник 27 сигнал бланкирования.
С выхода приемника 27 сигнал поступает в вычислительный блок 32, в котором известными методами [4, 5, 6] осуществляется обнаружение кодовых посылок, которые относятся к соответствующему ПО, отождествление их по индивидуальному номеру блока 1 сигнализации, расчет его параметров движения, слежения по сообщениям с приемника 34 сигналов глобальной навигационной спутниковой системы и с приемника 27 за траекторией движения, в том числе соседних ПО. После приведения к выбранному формату данные, обработанные в вычислительном блоке 32 передаются для отображения в блоке 33 регистрации. Прошедшие элемент И 36 кодовые посылки с блока 22 формирования ПСП и кодирования также поступают на вычислительный блок 32 и (при необходимости) для контроля преобразуются к формату, необходимому для блока 33 регистрации. Выбор интервала времени для передачи кодовых посылок через элемент И 35 или в заданный момент времени с привязкой к единому глобальному времени осуществляется в вычислительном блоке 32 в зависимости от выбранного в системе режима работы. Синхронизация процессов передачи, приема и обработки информации в вычислительном блоке 32 осуществляется с помощью меток шкалы единого всемирного времени, снимаемых с приемника 34 сигналов глобальной навигационной спутниковой системы.
В состав блока 28 управления входят пульты (кнопки, сенсоры и другие узлы), с помощью которых с приемной станции 2 можно обратиться к любому из ПО, находящемуся в зоне радиосвязи. Это расширит функции системы и позволит организовать в системе обмен данными о местонахождении подвижных объектов или другими сообщениями, получить необходимую для оператора справочную информацию практически в реальном масштабе времени с привязкой к точному единому всемирному времени. Вычислительный блок 32 соединен также двусторонними связями с аппаратурой 29 связи с входами-выходами 30, например, по стыку RS-232. Входы-выходы 30 используются для организации обмена информацией между приемными станциями 21, 22, ..., 2М и соответствующими диспетчерскими станциями 3.
Сигнал, сформированный в блоке сигнализации 1 ПО, принимается антенно-фидерными устройствами 14 приемных станций 21, 22, ..., 2М и через высокочастотную развязку 15 передается в приемники 16, в которых производится фильтрация от внеполосных помех, усиление и перенос фазоманипулированного сигнала в низкочастотную область. С выхода каждого приемника 16 сигнал поступает в вычислительный блок 17, в котором известными методами [4, 5, 6] осуществляется обнаружение кодовых посылок, которые относятся к соответствующему ПО, отождествление их по индивидуальному номеру блока 1 сигнализации, расчет его параметров движения, слежения за траекторией движения ПО, в том числе соседних ПО, путем обработки сообщений с приемника сигналов глобальной навигационной спутниковой системы, входящего в состав датчиков 10 сигнализации, и с приемника 16. После приведения к выбранному формату данные, обработанные в вычислительном блоке 17, передаются для отображения в блоке 18 регистрации. Прошедшие элемент И 19 кодовые посылки с блока 9 формирования ПСП и кодирования также поступают на вычислительный блок 17 и (при необходимости) для контроля преобразуются к формату, необходимому для отображения на блоке 18 регистрации. Выбор интервала времени для передачи кодовых посылок через элемент И 19 или в заданный момент времени с привязкой к единому глобальному времени осуществляется в вычислительном блоке 17 в зависимости от выбранного в системе режима работы. Синхронизация процессов передачи, приема и обработки информации в вычислительном блоке 17 осуществляется с помощью меток шкалы единого всемирного времени, снимаемых с приемника сигналов глобальной навигационной спутниковой системы, входящего в состав датчиков 10 сигнализации.
Станция отображения информации 4 принимает данные, передаваемые диспетчерскими станциями 3, накопленные от всех приемных станций 21, 22, ..., 2М аппаратурой 42 связи с входами-выходами 43, выполненной, например, на наземных модемах. Обмен данными в дуплексном режиме между аппаратурой 42 связи с входами-выходами 43 и персональной электронно-вычислительной машиной 45 (на фиг.5 показана одна из них) осуществляется через первый блок 44 сопряжения. Персональная электронно-вычислительная машина 45 предназначена для оценки достоверности принимаемых кодовых посылок и формирования передаваемых кодовых посылок, которые относятся к выбранному для сопровождения ПО, расчета его параметров движения, слежения за траекторией движения ПО, в том числе нескольких, взятых на сопровождение, обработки сообщений с выхода приемника 46 сигналов глобальной навигационной спутниковой системы, поддержки протокола обмена данными в системе, формирования и отображения необходимой информации, выбора интервала времени для передачи кодовых посылок с привязкой к единому глобальному времени. Синхронизация процессов передачи, приема и обработки информации в ПЭВМ 45 осуществляется с помощью меток шкалы единого всемирного времени, снимаемых с приемника 46 сигналов глобальной навигационной спутниковой системы. Вычисленные координаты ПО накладываются на введенную в ПЭВМ 45 карту местности или города отображаются на экране дисплея ПЭВМ 45 в реальном времени совместно с дополнительной информацией, связанной с индивидуальным номером блока 1 сигнализации и состоянием его датчиков. Станция отображения информации 4 является получателем информации от диспетчерской станции 3 и в то же время источником информации управления для нее и подвижных объектов.
Наземные системы 6 передачи данных обеспечивают соединение между объектами системы 5 и 7 и могут быть выполнены на волоконно-оптических, проводных, оптических и радиолиниях связи.
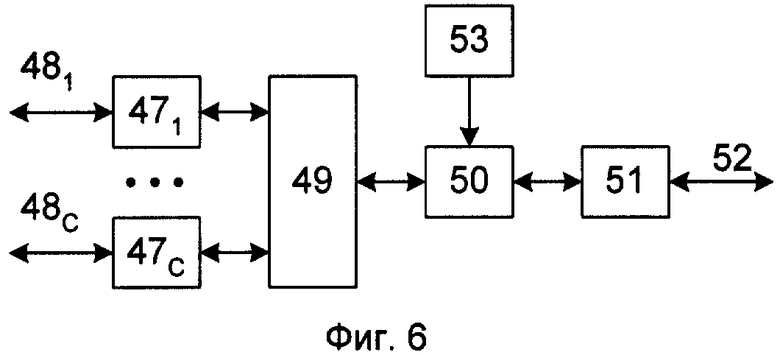
Центральная станция 7 (фиг.6) обеспечивает следующие функции:
- маршрутизацию сообщений по воздушным и наземным сетям;
- ведение динамически изменяемой маршрутной базы;
- преобразование форматов сообщений в соответствии с особенностями подсетей;
- защиту от несанкционированного доступа;
- тарификацию трафика;
- поддержку протоколов обмена данными по подсети "воздух-земля";
- контроль и управление удаленными станциями подвижных подсетей;
- поддержку функции передачи извещений о доставке сообщений;
- ведение архивов сообщений;
- ведение очередей с учетом категории срочности;
- выход на международные сети передачи данных.
Центральная станция 7 содержит аппаратуру 471, ..., 47с связи с соответствующими входами-выходами 48, блок 49 распределения сообщений, ПЭВМ 50 (на фиг.6 показана одна из них), второй блок 51 сопряжения с входами-выходами 52, приемник 53 сигналов глобальной навигационной спутниковой системы.
Сеть разнесенных региональных подсистем 5 может быть использована не только для оперативного контроля за местонахождением автомобилей и слежения за их передвижением, но и для выполнения аналогичных операций на железнодорожном, воздушном, речном и морском транспорте.
Для исключения коллизий при наличии у абонентов системы шкалы точного (единого) всемирного времени могут быть применены известные методы [5], например, по запросам с центральной станции 7, приемных станций 21, 22, ..., 2М, диспетчерских станций 3, станций отображения информации 41, 42, ..., 4K, или в определенном временном интервале, выделенном подвижному объекту для обмена данными.
В качестве высокочастотной развязки, например, при различных рабочих частотах на передачу и на прием, могут быть использованы диплексеры или ферритовые развязки.
Центральная станция 7 может быть выполнена на одной или нескольких стандартных ПЭВМ 50, сопряженных с блоком 49 распределения сообщений, на входы-выходы которого поступает информация с аппаратуры 471, ..., 47с связи с соответствующими входами-выходами 48, например, состоящей из наземных модемов типа ZyXEL U-336S. Блок 49 распределения сообщений может быть выполнен, например, программно. Второй блок 51 сопряжения с входами-выходами 52, например, на наземных модемах типа ZyXEL U-336S, обеспечивает обмен данными с получателями информации о подвижных объектах. Приемник 53 сигналов глобальной навигационной спутниковой системы, подключенный к одному из входов ПЭВМ, может быть выполнен, например, на устройстве типа Jupiter 12 GPS Receiver TU 35-D410.
Система может использоваться в зональном варианте (фрагмент системы), состоящем из нескольких региональных подсистем 5, и в масштабах, например, всей страны. В этом случае входы-выходы условно обозначенных региональных подсистем 51 и 5с могут быть взаимосвязаны.
Система определения местонахождения подвижных объектов по сравнению с аналогами имеет следующие преимущества:
- увеличивается точность определения местонахождения ПО за счет использования высокоточных значений координат, получаемых с выходов приемников сигналов глобальной навигационной спутниковой системы;
- упрощается процедура организации единой временной шкалы для объектов системы за счет использования отметок глобального времени с выходов приемников сигналов глобальной навигационной спутниковой системы;
- увеличивается число обслуживаемых ПО и зона действия системы;
- обеспечивается передача запросных сообщений с ПО на центральную станцию 7 для обеспечения информационной поддержки в процессе движения;
- появляется возможность не только контроля местонахождения подвижных объектов, но и оперативного управления их движением, передачи им командных воздействий с диспетчерских станций 3 и станций отображения информации 4;
- обеспечивается сбор, обработка и хранение информации о местонахождении подвижных объектов, осуществляется постоянное слежение за их движением.
Литература
1. Балашов А.И. и др. Международная космическая радиотехническая система обнаружения терпящих бедствие. М.: Радио и связь, 1987.
2. Крохин В.В. Информационно-управляющие космические радиолинии, Ч.2. М.: НИИЭИР, 1993, с.52.
3. Патент РФ №2082279, М. Кл. Н 04 В 7/26, G 01 S 5/00, G 08 B 25/00, 1997, БИ №17 (прототип).
4. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
5. Д.С.Конторов, Ю.С.Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.: Сов. Радио, 1971, 367 с.
6. С.З.Кузьмин. Цифровая обработка радиолокационной информации. - М.: Сов. Радио, 1967, 384 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2572829C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ И СЛЕЖЕНИЯ ЗА УДАЛЕННЫМИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2290763C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1996 |
|
RU2082279C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
| СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2487418C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516686C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2791262C1 |

Изобретение относится к радиотехнике и может использоваться для автоматического определения местонахождения подвижных объектов (ПО). Техническим результатом является расширение функциональных возможностей системы, а именно расширение зоны обслуживания ПО, повышение точности определения местонахождения ПО, наличие возможности управления движением ПО с диспетчерских станций и абонентов. Работа системы заключается в том, что всем ПО, которые могут появиться в зоне действия системы, назначаются индивидуальные номера, эти номера полностью определяют технические характеристики и эксплуатационные возможности ПО, кроме того, назначаются общие рабочие частоты для радиоканалов обмена данными между блоками сигнализации ПО, находящихся в зоне действия системы, частоты приема сигналов ГЛОНАСС, частоты систем радиосвязи между объектами системы определения местонахождения ПО, на все вычислительные блоки ПО и приемных станций, ПЭВМ диспетчерских станций, станций отображения информации и центральной станции устанавливается соответствующее программное обеспечение, в которое вместе с указанными выше процедурами заложены алгоритмы обмена данными, форматы передаваемых сообщений, выделенные для обмена данными временные интервалы и другие необходимые процедуры. 5 з.п. ф-лы, 7 ил.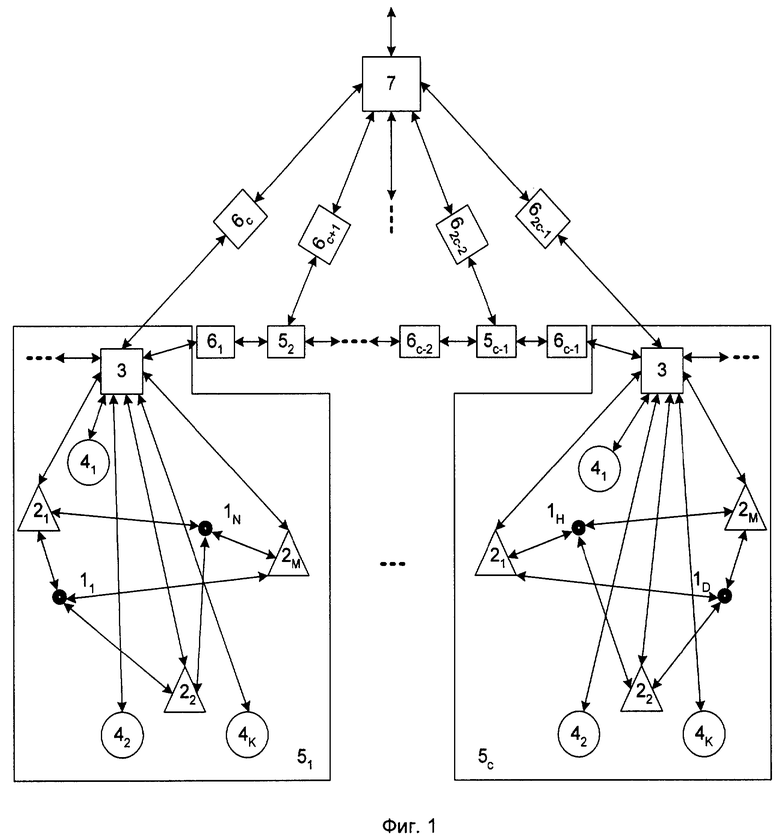
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1996 |
|
RU2082279C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 1996 |
|
RU2137150C1 |
| СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2216047C2 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2047839C1 |
| СПОСОБ ПОЛУЧЕНИЯ СОКА ИЗ РАСТИТЕЛЬНОГО СЫРЬЯ | 2002 |
|
RU2218835C1 |
| US 5548822 A, 20.08.1996 | |||
| Устройство для чтения плоскопечатного текста слабовидящими | 1973 |
|
SU448015A1 |

