Изобретение относится к электротехнике и может быть использовано в качестве регулируемого энергетического блока электромобиля.
Известны различные конструкции тяговых систем электромобилей, включающие источники питания - обычно литий-ионные батареи аккумуляторов, устройства преобразования напряжения и различного рода двигатели - коллекторные постоянного тока, асинхронные и синхронные многофазные переменного тока с использованием вариаторов для плавной регулировки скорости движения автомобиля. К преимуществам коллекторных двигателей постоянного тока относится возможность плавной регулировки вращательного момента изменением постоянного напряжения и высокие пусковые моменты. Однако серьезные недостатки этих двигателей, связанные с наличием у них коллектора - источника ненадежности их работы, привели к отказу от их использования в электромобилях в пользу асинхронных двигателей переменного тока с использованием вариаторов в схеме трансмиссии.
Указанные недостатки известных тяговых систем устранены в заявляемом техническом решении.
Целями изобретения являются повышение надежности работы и обеспечение простыми средствами вариации крутящего момента в рабочем двигателе с высоким к.п.д.
Указанные цели достигаются в заявляемой тяговой системе электромобиля, содержащей аккумуляторную батарею и преобразователь постоянного напряжения в переменное, отличающейся тем, что силовой трансформатор на однофазное напряжение с повышенной частотой 0,4…1 кГц преобразователя напряжения имеет многоотводную вторичную обмотку с N эквидистантно по напряжению распределенными выводами относительно общего вывода, подключаемые по одному через симисторы или пары встречно-параллельно включенных тиристоров, управляемые от электронного блока, к выпрямителю с фильтром через согласующий трансформатор или без него, выход выпрямителя с фильтром подключен к бесколлекторному двигателю постоянного тока со скользящими контактами, а электронный блок содержит аналого-цифровой преобразователь с источником опорного напряжения с подключенным к нему прецизионным потенциометром, изменяющим входное управляющее напряжение, подаваемое на вход аналого-цифрового преобразователя, движок прецизионного потенциометра механически связан с педалью акселератора, выход аналого-цифрового преобразователя подключен к дешифратору с N≤2m выходами, где m - число двоичных разрядов кода на выходе аналого-цифрового преобразователя, к которым подключены N тиристорных оптопар, управляющих включением соответствующих симисторов или пар встречно-параллельно включенных тиристоров. При этом бесколлекторный двигатель постоянного тока со скользящими контактами выполнен из неподвижно установленных центрального прямого магнита, например, неодимового, со скругленными магнитными полюсами и магнитопроводящего цилиндра, между которыми размещен немагнитный цилиндрический стакан с осью его вращения и немагнитной крышкой, на которых выполнена рабочая обмотка, подключенная к скользящим контактам, части витков которой, находящиеся в двух магнитных зазорах, ортогональны векторам пространственно ограниченного радиально-цилиндрического магнитного поля, создаваемого указанным прямым постоянным магнитом.
Достижение целей изобретения объясняется использованием электронной цифровой системы управления коэффициентом трансформации многоотводного силового транс-форматора преобразователя постоянного напряжения аккумуляторной батареи в варьируемое переменное напряжение с высоким к.п.д. преобразования и последующим его выпрямлением и фильтрацией, а также использованием бесколлекторного двигателя постоянного тока со скользящими контактами с целью повышения надежности работы (путем исключения искрения в скользящих контактах) и увеличения его быстроходности из-за исключения переходных процессов, характерных для коллекторных двигателей.
На рис. 1 приведена блок-схема системы, включающей:
1 - аккумуляторную батарею (АБ), например, литийионную с напряжением 400…600 В;
2 - преобразователь напряжения (ПН) постоянного напряжения в переменное с повышенной частотой (для снижения массогабаритных параметров силового трансформатора);
3 - электронно-управляемый силовой трансформатор (ЭУСТ), вторичная обмотка которого имеет N отводов с равным шагом по напряжению между смежными выводами;
4 - блок электронного управления (БЭУ) переключением выводов трансформатора 3,
5 - бесколлекторный двигатель постоянного тока (БДПТ), питаемый постоянным током.
На рис. 2 представлена обобщенная принципиальная схема заявляемой системы, которая включает следующие элементы и узлы:
6 - задающий генератор преобразователя напряжения 2,
7 - силовые транзисторы выходного каскада генератора, определяющие выходную мощность генерации напряжения с повышенной частотой, например, 400…1000 Гц,
8 - силовой трансформатор с N - отводной вторичной обмоткой,
9 - силовые симисторы (силовые тиристорные пары), их число равно N,
10 - тиристорные оптопары, тиристоры которых включают соответствующие силовые симисторы 9 по цепи «управляющий электрод симистора - тиристор оптопары - ограничивающий резистор R1 - незаземленный источник питания 11 (ИН1) - анод симистора», а светодиоды оптопар включены по цепи: «низковольтный заземленный источник питания 12 (ИП2) - ограничивающий резистор R2 - светодиод оптопары - i-ый выход дешифратора 13»,
13 - m-разрядный двоичный дешифратор с N рабочими выходами (по числу рабочих выводов с вторичной обмотки силового трансформатора 8), причем N≤2m,
14 - аналого-цифровой преобразователь (АЦП) с двоичными m разрядами на выходе,
15 - источник опорного напряжения для АЦП, например, с напряжением +5 В,
16 - прецизионный потенциометр - датчик управляющего напряжения, регулятор которого механически связан с педалью акселератора.
17 - согласующий трансформатор (при необходимости),
18 - выпрямительный мост Греца, диоды которого закреплены на пластине охлаждения, с фильтром, а также с возможностью установки переключателя для реверса двигателя,
19 - бесколлекторный двигатель постоянного тока со скользящими контактами,
20 - неподвижно расположенный прямой неодимовый магнит со скругленными магнитными полюсами, создающий в рабочих зазорах магнитное поле, скрещенное к рабочим частям проводников рабочей обмотки ротора (на рис. 3 этот магнит обозначен цифрой 21).
На рис. 3 приведена одна из конструкций БДПТ 5 с указанными обозначениями:
21 - плоский неодимовый магнит со скругленными магнитными полюсами,
22 - магнитопроводящий цилиндрический статор,
23 - рабочую обмотку статора в форме «беличьего колеса»,
24 - цилиндрический стакан с осью вращения из немагнитного электропроводящего материала, например, Д-16,
25 - крышку цилиндрического стакана с укороченной втулкой вращения из немагнитного материала,
26 - токосъемную крышку двигателя,
27 - боковую крышку двигателя с неподвижной втулкой, обращенной внутрь двигателя,
28 - контргайку жесткого крепления оси неодимового магнита 21; на этой оси имеется резьба,
29 - щеткодержатель с парой подпружиненных к кольцевым контактам 30 и 31 щеток,
30 - изолированный от оси вращения ротора кольцевой (например, медный) контакт, подключенный с началом рабочей обмотки ротора,
31 - касающийся оси вращения ротора кольцевой (например, медный) контакт,
32 - электроды подключения двигателя к источнику питания, к мосту Греца 18,
33 - электрически закрепленный на цилиндрическом стакане 24 конец обмотки 23,
34 - один их четырех подшипников двигателя.
На рис. 4 показана часть фронтального разреза двигателя со следующими размерами: R - радиус рабочей обмотки 23, rП - радиус скруглений магнитных полюсов N и S плоского неодимового магнита 21 с осями его неподвижного крепления, Н - ширина магнита 21 при заданной его длине L (не указана на рис. 3), Δ - магнитные зазоры между магнитными полюсами магнита 21 и цилиндрического магнитопровода статора 22, внутри которых располагается цилиндрический стакан 24 с рабочей обмоткой 23 ротора с воздушными зазорами от магнитных полюсов и цилиндрического статора (неподвижных частей двигателя).
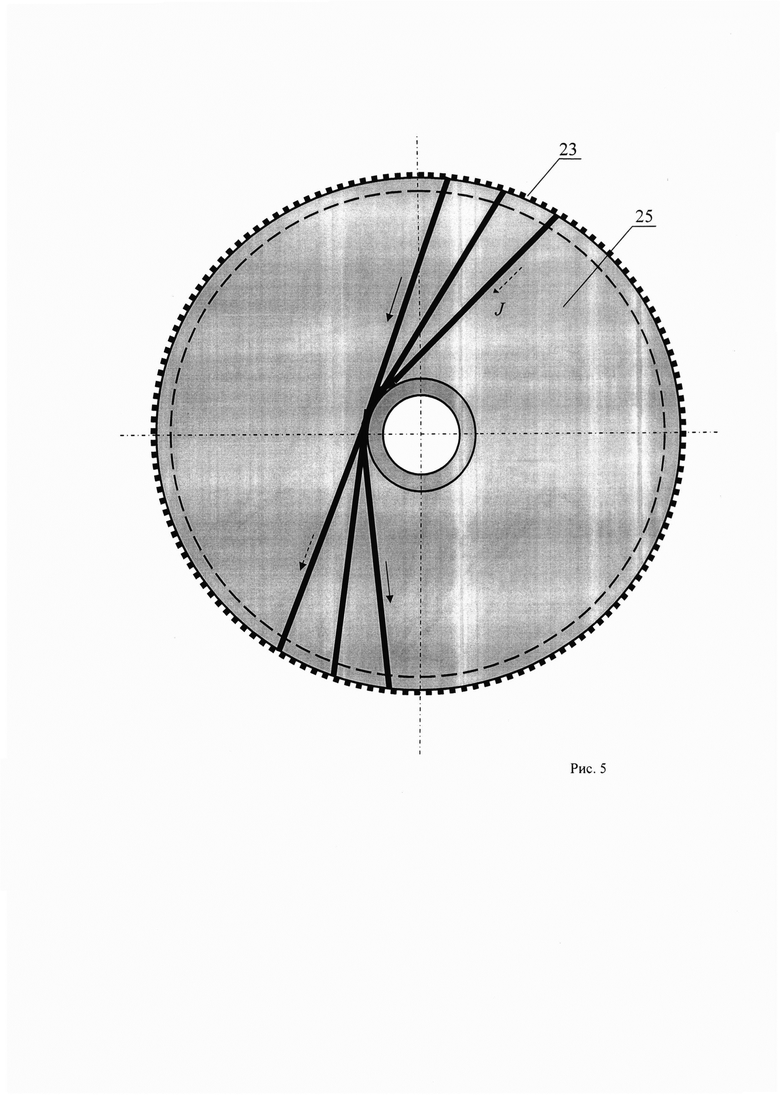
На рис. 5 показана выборочно организация намотки проводника рабочей обмотки 23 в форме «беличьего колеса» на поверхности цилиндрического стакана в сборе с неодимовым магнитом 21 и крышкой 25 с ее втулкой. Так, начальный первый проводник огибает втулку крышки 25 и далее идет по сплошной стрелке на противоположный конец этой крышки, занимая положение n/2, где n - число витков в рабочей обмотке 23. Затем показано направление шестого проводника, огибающего втулку крышки 25 и занимающего место (n/2)+5 на противоположном конце стакана 24. Наконец, одиннадцатый проводник, огибая втулку крышки 25, идет далее по прерывистой стрелке на место за номером (n/2)+10, и т.д. Таким способом осуществляется намотка n витков рабочей обмотки 23. Все проводники рабочей обмотки 23 также огибают втулку на днище цилиндрического стакана.
Рассмотрим действие заявляемой тяговой системы электромобиля.
Пусть для определенности дешифратор 13 имеет 64 выхода, первый из которых, обозначен, как «0», соответствует нулевому управляющему напряжению с выхода прецизионного потенциометра 16, при котором на выходе АЦП 14 образуется 6-и разрядный двоичный код 000000, и при этом на выходе «0» дешифратора возникает логический «0» (не более 0,4 В). На остальных выходах дешифратора имеются сигналы логической «1» (не менее 4 В), если применяются микросхемы ТТЛ-логики. При этом все светодиоды оптопар 10 не включены и не светятся, а соответственно все силовые симисторы 9 являются выключенными, а двигатель 5 обесточен. По мере увеличения напряжения с выхода прецизионного потенциометра 16 (то есть при соответствующем нажатии на педаль акселератора) на одном из выходов дешифратора 13 возникает сигнал логического «0» и при этом зажигается соответствующий светодиод оптопары 10 от заземленного источника ИП2 и включается оптотиристор этой оптопары, что приводит к включению силового симистора 9 по его управляющему электроду от незаземленного источника ИП1. При этом к БДПТ 5 подводится переменное напряжение от силового трансформатора 8 по соответствующему выводу его вторичной обмотки, и на колеса передается требуемый вращательный момент. Максимальный вращательный момент возникает при подаче на вход дешифратора 13 двоичного кода 111111.
Дешифратор 13 на 64 выхода может быть собран на четырех микросхемах ТТЛ-логики К155ИДЗ, на младшие разряды которых параллельно включены младшие четыре разряда с выхода АЦП 14, а старшие два разряда с АЦП разведены на входы EN разрешения работы соответствующих четырех дешифраторов на микросхемах К155ИД3 через дополнительный дешифратор на четыре выхода, например, выполненный на интегральной микросхеме К155ИД4.
Рассмотрим пример реализации электромобиля в его тяговой системе.
Пусть рабочий двигатель 5 имеют наибольшую мощность 30 кВт при напряжении на его рабочих обмотках 400 В, что отвечает току в 75 А. Это отвечает мощности автомашины в 40 л.с. - вполне достаточной для бюджетного автомобиля при скорости движения до 100 км/ч. При емкости аккумулятора 400 А*час, запас хода по электроэнергии составляет 5,3 часа при скорости 100 км/ч. Этого оказывается достаточным при внутригородской езде и сравнительно недальних поездок за городом (до 500 км).
Для автомашин представительского класса можно применять тяговую систему с наибольшей мощностью около 150 кВт (более 200 л.с.) при напряжении 600 Вис полным током до 250 А. При этом можно применить литий-ионные аккумуляторы емкостью 2000 А»час, рассчитанных на 8-и часовой разряд при скорости 180…200 км/ч. Правда, стоимость такой батареи аккумуляторов превышает 1 млн.рублей.
Работа двигателя (рис. 3) особых пояснений не требует. Он включает неподвижный статор из неодимового магнита 21 и цилиндрического магнитопровода 22 и ротор из рабочей обмотки 23, намотанной на цилиндрическом полом стакане 24 из немагнитного материала, свободно вращающемся в магнитном зазоре между элементами 21 и 22. Рабочие части обмотки 23 длиной L находящиеся в цилиндрическом магнитном зазоре, ориентированы ортогонально к магнитному полю. Поэтому возникающая в обмотке 23 сила Лоренца образует вращательный момент, и ротор вращается в соответствии с правилом левой руки. Конструкция двигателя понятна из рассмотрения рис. 3-5.
Как видно на рис. 3 и 4, в двух магнитных зазорах шириной Δ каждый располагается по р частей витков рабочей обмотки 3, общее число которых равно n=2π R/d, где d - диаметр проводника рабочей обмотки при ее плотной намотке виток к витку. При известных значениях ширины Н неодимового магнита 21 и радиусе закругления rП его магнитных полюсов легко вычисляется угол взаимодействия магнитного поля с р отрезками витков рабочей обмотки 23, то есть с прямыми проводниками длиной L, Этот радиальный угол а вычисляется по следующей формуле: 
Длина дуги  на рабочей обмотке 23, охватываемая магнитным полем с индукцией В, легко вычисляется из выражения:
на рабочей обмотке 23, охватываемая магнитным полем с индукцией В, легко вычисляется из выражения:

и на этой длине дуги размещается р отрезков проводника длиной L каждый, где  Тогда полная длина проводника рабочей обмотки 23 в любой момент времени при вращении ротора, охваченного магнитным полем с магнитной индукцией В в двух магнитных зазорах, равна LΣ согласно выражениям (1) и (2):
Тогда полная длина проводника рабочей обмотки 23 в любой момент времени при вращении ротора, охваченного магнитным полем с магнитной индукцией В в двух магнитных зазорах, равна LΣ согласно выражениям (1) и (2):

Согласно закона об электромагнитной индукции (правило левой руки) в скрещенном к магнитному полю с индукцией В прямом проводнике длиной LΣ с протекающем по нему током J возникает поперечная к проводнику сила Лоренца F, значение которой находится по формуле:

Рассмотрим пример одной из возможных реализаций не автомобильного двигателя.
Пусть L=0,1 м, Н=2 rП/3, d=2 мм, R=0.06 м, В=1.3 Тл и J=30 А, Тогда имеем для α=arctg  = arctg 0.3162=0,30625 рад. При этом р=R α/d=2*60*0,30625/2 ≈ 18, следовательно, LΣ = 2 р L=3,6 м. Тогда легко находим полную касательную Лоренцеву силу, действующую в любой момент времени на рабочую обмотку 3, равную F=В LΣ J=1,3*3,6*30=140,4 ньютон. При R=0,06 м вращательный момент W=F R=140,4 * 0,06=8,414 Дж. При скорости вращения выходной оси ротора f=50 об/сек, то есть при ω=314 рад/сек получаем механическую мощность двигателя РМ=8.414 *314=2644 Вт. При этом плотность тока в медном проводнике выбирается порядка 10 А/мм2, что допустимо. Магнитные зазоры Δ можно выбрать равными 8 мм, так что между полюсами магнита 21 и внутренней стенкой цилиндрического стакана 24, а также между наружной кромкой проводника рабочей обмотки 23 и магнитопроводящим цилиндром 22 статора образуются воздушные зазоры по 2 мм, и при этом толщина стенки цилиндрического стакана 24 составляет также 2 мм.
= arctg 0.3162=0,30625 рад. При этом р=R α/d=2*60*0,30625/2 ≈ 18, следовательно, LΣ = 2 р L=3,6 м. Тогда легко находим полную касательную Лоренцеву силу, действующую в любой момент времени на рабочую обмотку 3, равную F=В LΣ J=1,3*3,6*30=140,4 ньютон. При R=0,06 м вращательный момент W=F R=140,4 * 0,06=8,414 Дж. При скорости вращения выходной оси ротора f=50 об/сек, то есть при ω=314 рад/сек получаем механическую мощность двигателя РМ=8.414 *314=2644 Вт. При этом плотность тока в медном проводнике выбирается порядка 10 А/мм2, что допустимо. Магнитные зазоры Δ можно выбрать равными 8 мм, так что между полюсами магнита 21 и внутренней стенкой цилиндрического стакана 24, а также между наружной кромкой проводника рабочей обмотки 23 и магнитопроводящим цилиндром 22 статора образуются воздушные зазоры по 2 мм, и при этом толщина стенки цилиндрического стакана 24 составляет также 2 мм.
При вращении ротора в его рабочей обмотке возникает э.д.с. индукции с обратным знаком полярности по сравнению с полярностью питающего напряжения U источника постоянного тока. Величину возникающей э.д.с. Е находят из известного соотношения:

При подстановке в (5) указанных выше величин, имеем Е= -1,3*3,6*314*0,06 = -88,16 В. То есть напряжение питания U при этом должно несколько превышать по модулю величину Е. Это превышение ΔU=ρ J, где ρ - активное сопротивление всей рабочей обмотки 23 с ее выводами, которое определяется для медного проводника как ρ=0,017 Ом.м/мм2 х (полную длину обмотки с выводами в метрах) / (сечение медного проводника в кв.мм.). Полное число витков рабочей обмотки n=2π R/d=6,28*60/2=188 витков. Длина одного витка равна 2 (102+39)=282 мм, а полная длина рабочей обмотки 23 равна 0,282*188=53 м С учетом выводов принимаем длину проводника равной 53,2 м. Тогда сопротивление в цепи ротора будет равно 0.017*53,2/3,14=0,288 Ом. При токе J=30 А получаем ΔU=8,64 В. Следовательно, напряжение источника питания на выходных клеммах 32 двигателя должно быть равно U=ΔU+|Е|=8,64+88,16=96,80 В. При этом потребляемая мощность РО составляет РО=96,8*30=2904 Вт. Тогда КПД двигателя в таком режиме равен η=2544/2904=0,876.
Отметим, что с увеличением питающего напряжения U будет расти мощность и КПД такого двигателя, поскольку ΔU =const(ω) при заданном наибольшем токе J, что весьма существенно отличает его от коллекторных двигателей постоянного тока. Поэтому предлагаемый двигатель может найти широкое распространение в технике.
Недостатком рассматриваемого двигателя постоянного тока (БДПТ) с подачей на него переменного тока является невозможность его работы в режиме реверса, и его нельзя устанавливать непосредственно в колеса, так как будет невозможно движение задним ходом.
Применение заявляемой тяговой системы позволит существенно упростить состав оборудования автомобиля, получить высокий пусковой момент, то есть приемистость машины, при сохранении достаточно большого ресурса по пробегу без подзарядки аккумуляторной батареи. Такой автомобиль может найти широкий спрос у населения в его бюджетном варианте.
Изобретение относится к электрическим тяговым системам транспортных средств. Тяговая система электромобиля содержит аккумуляторную батарею и преобразователь постоянного напряжения в переменное. Силовой трансформатор преобразователя напряжения имеет многоотводную вторичную обмотку с N эквидистантно по напряжению распределенными выводами относительно общего вывода, подключаемыми по одному через симисторы или пары встречно-параллельно включенных тиристоров, управляемые от электронного блока, к выпрямителю с фильтром. Выход выпрямителя с фильтром подключен к бесколлекторному двигателю постоянного тока со скользящими контактами. Электронный блок содержит аналого-цифровой преобразователь с источником опорного напряжения с подключенным к нему прецизионным потенциометром, изменяющим входное управляющее напряжение, подаваемое на вход аналого-цифрового преобразователя. Движок прецизионного потенциометра механически связан с педалью акселератора. Выход аналого-цифрового преобразователя подключен к дешифратору выходами, к которым подключены тиристорные оптопары, управляющие включением соответствующих симисторов или пар встречно-параллельно включенных тиристоров. Технический результат заключается в повышении надежности работы тяговой системы электромобиля. 1 з.п. ф-лы, 5 ил.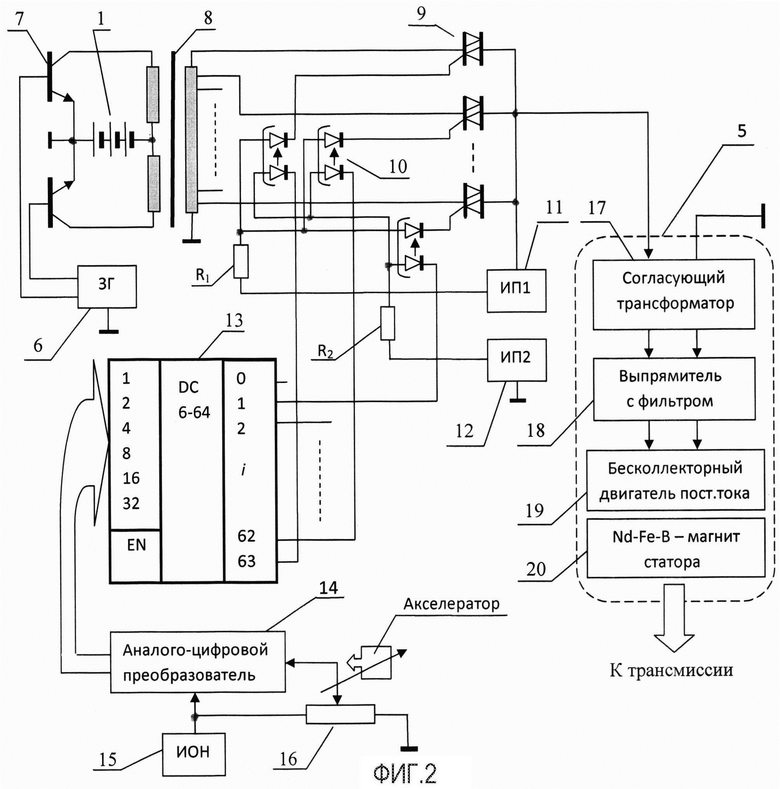
1. Тяговая система электромобиля, содержащая аккумуляторную батарею и преобразователь постоянного напряжения в переменное, отличающаяся тем, что силовой трансформатор на однофазное напряжение с повышенной частотой 0,4…1 кГц преобразователя напряжения имеет многоотводную вторичную обмотку с N эквидистантно по напряжению распределенными выводами относительно общего вывода, подключаемыми по одному через симисторы или пары встречно-параллельно включенных тиристоров, управляемые от электронного блока, к выпрямителю с фильтром через согласующий трансформатор или без него, выход выпрямителя с фильтром подключен к бесколлекторному двигателю постоянного тока со скользящими контактами, а электронный блок содержит аналого-цифровой преобразователь с источником опорного напряжения с подключенным к нему прецизионным потенциометром, изменяющим входное управляющее напряжение, подаваемое на вход аналого-цифрового преобразователя, движок прецизионного потенциометра механически связан с педалью акселератора, выход аналого-цифрового преобразователя подключен к дешифратору с N≤2m выходами, где m - число двоичных разрядов кода на выходе аналого-цифрового преобразователя, к которым подключены N тиристорных оптопар, управляющих включением соответствующих симисторов или пар встречно-параллельно включенных тиристоров.
2. Тяговая система электромобиля по п. 1, отличающаяся тем, что бесколлекторный двигатель постоянного тока со скользящими контактами выполнен из неподвижно установленных центрального прямого магнита, например неодимового, со скругленными магнитными полюсами и магнитопроводящего цилиндра, между которыми размещен немагнитный цилиндрический стакан с осью его вращения и немагнитной крышкой, на которых выполнена рабочая обмотка, подключенная к скользящим контактам, части витков которой, находящиеся в двух магнитных зазорах, ортогональны векторам пространственно ограниченного радиально-цилиндрического магнитного поля, создаваемого указанным прямым постоянным магнитом.
| ТИРИСТОРНЫЙ ПЕРЕКЛЮЧАТЕЛЬ ПОСТОЯННОГО ТОКА ДЛЯ ЭЛЕКТРОМОБИЛЯ | 2016 |
|
RU2630474C1 |
| СИСТЕМА ПРИВОДА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2106266C1 |
| ЭЛЕКТРОПРИВОД КОЛЕС АВТОМОБИЛЯ | 2008 |
|
RU2373077C1 |
| US 2014368170 A1, 18.12.2014. | |||

