Изобретение относится к нейрохирургии, а точнее, к способам хирургического внедрения имплантатов для восстановления функции переднего опорного комплекса после резекции одного или нескольких тел позвонков и может быть использовано в ортопедии, травматологии и нейрохирургии при хирургическом лечении заболеваний и повреждений позвоночника, в частности, его шейного отдела.
Для реклинации и восстановления физиологических размеров позвоночника в современной нейрохирургии широко используют разные телозамещающие эндопротезы различных конструкций. При этом имплантируемые эндопротезы, во-первых, должны иметь четко определенный необходимый размер, зависимый от костного дефекта, удаляемого во время корпоректомии или резекции позвоночника, а, во-вторых, необходимо четко определить место его расположения и направление вкручивания антимиграционных фиксирующих винтов. Задачи определения необходимых размеров эндопротеза, в частности, его длины и диаметра, определения его пространственной ориентации в позвоночнике, размеры и направление вкручивания антимиграционных винтов решают по-разному. Традиционно для их решения проводят предоперационные исследования поврежденного участка позвоночника с привлечением компьютерной техники, результатов рентгеноскопических исследований, результатов КТ-исследований и магнитно-резонансной томографии.
Среди таких методов исследования известен способ заднего межтелового спондилодеза, при котором, еще до оперативного вмешательства, по данным рентгеноскопических и МРТ исследований поврежденного участка позвоночника, определяют диаметр межтелового диска, следовательно, и диаметр имплантата. Затем с передневерхней гребли подвздошной кости резецируют цилиндрический бикортикальный аутотрансплантат необходимого диаметра и рассекают его в поперечном направлении для получения двух аутотрансплантатов одинаковой длины, и осуществляют спонди-лодез по замене пораженного диска на имплантаты [см. пат. Российской Федерации №2408316 по классу А01В 17/56 опубликованный 10.01.2011 года].
Основным недостатком известного способа спондилодеза является ограничение области его использования, поскольку он приспособлен только для замены межтеловых дисков, а также известный способ не предусматривает исследований деформаций позвоночника и возможности его исправления с помощью межтеловых имплантатов. Кроме того, предвати-чельное исследование предусматривает определение только размеров аутотрансплантатов, хотя для этого достаточно было бы воспользоваться результатами рентгеновского исследования, поскольку МРТ исследование его только лишь дублирует, не предоставляя дополнительной полезной информации.
Этого недостатка лишен способ переднего спондилодеза, при котором перед оперативным вмешательством, по данным рентгенограмм оценивают степень посттравматической деформации сегмента позвоночника, снижение высоты тела позвонка, его клиновидную деформацию, выполняют КТ-исследования, во время которых выполняют реформацию передней стенки позвоночного канала и коррекцию посттравматической деформации, после чего осуществляют оперативное вмешательство. После завершения реконструкции проводят повторное КТ-исследование с 3D реконструкцией, по результатам которых определяют посттравматический дефект тела поврежденного позвонка и объемы тел смежных позвонков, и, если объем дефекта будет составлять более 25% от среднеарифметической величины объемов тел смежных позвоночников, спондилодез проводят повторно [см. пат. Российской Федерации №2445038 по классу А01В 17/56 опубликованный 20.03.2012 года].
Основным недостатком известного технического решения является низкая эффективность предварительного моделирования хода спондилодеза, поскольку такое моделирование не дает возможности быть уверенным в положительном результате после оперативного вмешательства, вынуждает проводить исследования повторно и, в некоторых случаях, осуществлять повторный спондилодез, из-за того, что первое предварительное исследование, несмотря на моделирование деформации позвоночника, не позволяет предвидеть изменение объема поврежденного позвонка. Из этого следует, что такое предварительное моделирование вообще можно считать лишним, поскольку после него необходимо еще раз повторять эти же самые исследования, а потому и не понятно, что именно моделировалось перед выполнением первого спондилодеза.
В этом плане, наиболее прогрессивным является способ спондилодеза с использованием новейшей роботизированной системы для спинальной нейрохирургии SpineAssist®, при котором проводят КТ-сканирование позвоночника пациента по стандартным требованиям, имитируют коррекцию деформаций позвоночника, если в такой нуждаются, из виртуального каталога хирургических имплантатов выбирают необходимые по размерам (длине и диаметру) фиксирующие винты, выбирают точки их установки, ориентируют направление вкручивания винтов в трех проекциях, после чего на позвоночник больного устанавливают платформу, на которой размещают и фиксируют мостовое приспособление (робот), который позиционирует свою направляющую «руку» в соответствии с запланированной траекторией, задавая в точности место расположения и траекторию установки винтов, затем в направляющий канал закладывают винты, и вкручивают их в позвоночник [см. WEB-сайт клиники спинальной нейрохирургии и неврологии АКСИС на базе научно-исследовательского института им. Н.Н. Бурденко. // Электронный ресурс. - Режим доступа: http://www. axisclinic.ru].
Основными недостатками известного технического решения являются ограниченность области использования, сложность оборудования и довольно узкая специализация робота. Робот приспособлен лишь для направления фиксирующих винтов, и никоим образом не способен внедрять иные виды имплантатов. Поэтому такое дорогостоящее оборудование, при использовании лишь для определения направления вкручивания винтов, ни с экономической, ни с медицинской точек зрения не оправдывает себя.
Еще один существенный недостаток известного технического решения заключается в том, что при предоперационном исследовании не проводится анализ возможности дистракции позвоночника, что является чрезвычайно важным и ответственным этапом исследования, поскольку именно дистракция позволяет определить возможную подвижность позвоночника в продольном направлении, следовательно, максимально возможную длину ендопротеза для возможности его установки между позвонками. Тоже самое можно сказать и о возможной угловой деформации позвоночника для оценки возможности его исправления с помощью эндопротеза.
В общем, несмотря на современность известного компьютерного диагностирования и выполнения хирургической операции с помощью робота, следует отметить, что он не приспособлен для спондилодезов с использованием эндопротезов и кейджев, заменяющих поврежденные резецированные позвонки.
Именно это обстоятельство ограничивает область использования известного компьютерного оборудования, а нейрохирурги вынуждены измерять размеры и подгонять эндопротезы обычными традиционными способами с использованием обычных измерительных инструментов, такх как линейки, штангели, циркули и проч. [см. статью: Слынько Е.И., Вербов В.В., Соколов В.В., Леонтьев А.Ю., Гончаренко А.Ф., Деркач В.М., Лобунько В.В. Хирургическая техника вентральной декомпрессии спинного мозга с корпородезом с использованием телескопических устройств //  журнал. - 2011. - №4 С. 64-65], или вообще осуществлять подгонку эндопротеза во время проведения самой хирургической операции, например, ножницами [см. инструкцию: «Органосохраняющая хирургическая технология переднего межтелового спондилодеза с использованием сетчатых титановых имплантатов», утвержденной Министерством здравоохранения республики Беларусь. - Минск: ГУ «Республиканский научно-практический центр травматологии и ортопедии», 2011. - 15 с.; С. 9-10], даже, когда ими используются телескопические эндопротезы (их штоки могут оказаться слишком длинными, или, наоборот, слишком короткими, для надежной фиксации эндопротезом позвоночника. Если шток эндопротеза будет иметь слишком большую длину, возникает высокая вероятность пролоббирования эндопротезом смежных с ним позвонков, а если недостаточную - возможна микромиграция эндопротеза, что не позволяет гарантировать эффективность восстановления функций позвоночника, следовательно, невозможно спрогнозировать последствия спондилодеза. Кроме того, известный способ SpineAssist® предоперационного исследования с роботизированной системой не предусматривает моделирование на виртуальной 3D модели параметров ложа для эндопротеза, что создает дополнительные трудности для определния истинного размера эндопротеза, в частности, оптимального его диаметра, а это, в итоге, снижает вероятность достижения полного восстановления функций позвоночника.
журнал. - 2011. - №4 С. 64-65], или вообще осуществлять подгонку эндопротеза во время проведения самой хирургической операции, например, ножницами [см. инструкцию: «Органосохраняющая хирургическая технология переднего межтелового спондилодеза с использованием сетчатых титановых имплантатов», утвержденной Министерством здравоохранения республики Беларусь. - Минск: ГУ «Республиканский научно-практический центр травматологии и ортопедии», 2011. - 15 с.; С. 9-10], даже, когда ими используются телескопические эндопротезы (их штоки могут оказаться слишком длинными, или, наоборот, слишком короткими, для надежной фиксации эндопротезом позвоночника. Если шток эндопротеза будет иметь слишком большую длину, возникает высокая вероятность пролоббирования эндопротезом смежных с ним позвонков, а если недостаточную - возможна микромиграция эндопротеза, что не позволяет гарантировать эффективность восстановления функций позвоночника, следовательно, невозможно спрогнозировать последствия спондилодеза. Кроме того, известный способ SpineAssist® предоперационного исследования с роботизированной системой не предусматривает моделирование на виртуальной 3D модели параметров ложа для эндопротеза, что создает дополнительные трудности для определния истинного размера эндопротеза, в частности, оптимального его диаметра, а это, в итоге, снижает вероятность достижения полного восстановления функций позвоночника.
В основу изобретения поставлена задача упрощения способа переднего спондилодеза с одновременным повышением эффективности хирургического вмешательства и эффективности восстановления функций позвоночника, за счет полной предварительной подготовки эндопротеза, предварительного установления конфигурации ложа, глубины резекции поврежденного позвонка на границе дистракции позвоночника путем проведения соответствующего виртуального исследования позвоночника пациента и моделирования «работы» позвоночника с имплантатом.
Решение поставленной задачи достигается тем, что способ переднего спондилодеза, при котором проводят КТ-сканирование позвоночника пациента в соответствии со стандартными требованиями, имитируют коррекцию деформаций позвоночника, если в этом возникает необходимость, определяют необходимые размеры телескопического имплантата и его подгонку, после чего увеличивают его размер до достижения оптимальной деформации позвоночника, согласно предложению, до оперативного вмешательства проводят магнитно-резонансную томографию позвоночника пациента, по результатам которой строят трехмерную модель позвоночника, по которой виртуально определяют физические размеры реального телескопического имплантата и ложа для его размещения, определяют параметры гибкости позвоночника и способность его к дистракции, после чего по полученным параметрам подготавливают телескопический имплантат, включая его заполнения костным материалом или биозаменителем и начинают непосредственно оперативное лечение позвоночника больного, во время которого по предварительно определенным параметрам готовят ложе, в которое устанавливают предварительно подготовленный телескопический имплантат и начинают его удлинять путем вращения штока, преодолевая сопротивление позвоночника, а при достижении телескопическим имплантатом предварительно определенной на модели его длины, прекращают дальнейшее увеличение его длины и фиксируют телескопический имплантат антимиграционными винтами, местонахождение и направление вкручивания которых предварительно определены на модели, после чего рану послойно зашивают.
Благодаря такому подходу, вообще исключается необходимость в повторных оперативных вмешательствах. Максимальный положительный результат и эффективность спондилодеза достигаются с первого раза, поскольку размеры телескопического имплантата определены заранее.
Благодаря предварительному определению медицинских показателей повреждения позвоночника с помощью магнитно-резонансной томографии с учетом индивидуальных особенностей и возможностей позвоночника пациента к дистракции, появляется возможность предварительно определить оптимальную длину телескопического имплантата, оптимальные размеры и конфигурацию ложа, и направление вкручивания антимиграционных винтов, которые, вместе, надежное расположение телескопического имплантата вместо извлеченного позвонка, и необходимую деформацию позвоночника для максимально возможного восстановления его функций.
Кроме того, появляется возможность предварительно и обоснованно определить размеры телескопического имплантата и подгонки его физических параметров (размеры, подгибание полупластин, оптимальное количество витков резьбы и проч.), и именно таким образом свести его массу к минимуму, а также уменьшить время оперативного вмешательства.
Благодаря отказу от платформы с роботом, не только упрощается комплекс оборудования и снижается его стоимость, но, главное, с зоны непосредственного проведения операции выведено приспособление, ограничивающее действия хирургов, мешая им осуществлять свободное манипулирование руками и инструментом.
В общем, предложенные предварительные исследования, проведенные на виртуальной модели и достижение смоделированных размеров телескопического имплантата в рабочем положении на реальном позвоночнике, позволяют получить максимальную эффективность лечения больных на фоне минимального риска и времени хирургического вмешательства и послеоперационного периода реабилитации, и именно так максимально повысить эффективность и результативность переднего спондилодеза.
Раздвижение телескопического имплантата до четко определенной величины в сочетании четко определенными размерами и конфигурацией ложа, количества антимиграционных винтов и направления их вкручивания, являются главным преимуществом предложения, позволяющим реализовать поставленные перед хирургом задачи.
Это предложение может быть успешно использовано и при выполнении спондилодеза с любым доступом на любом отделе позвоночника.
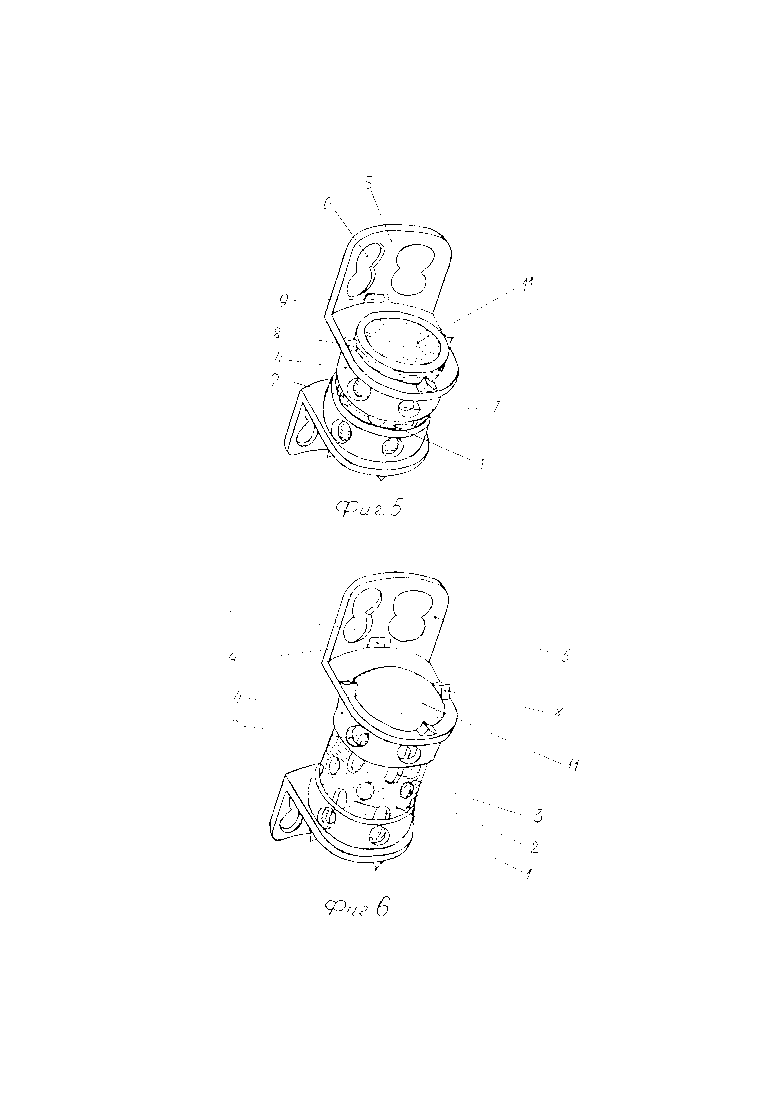
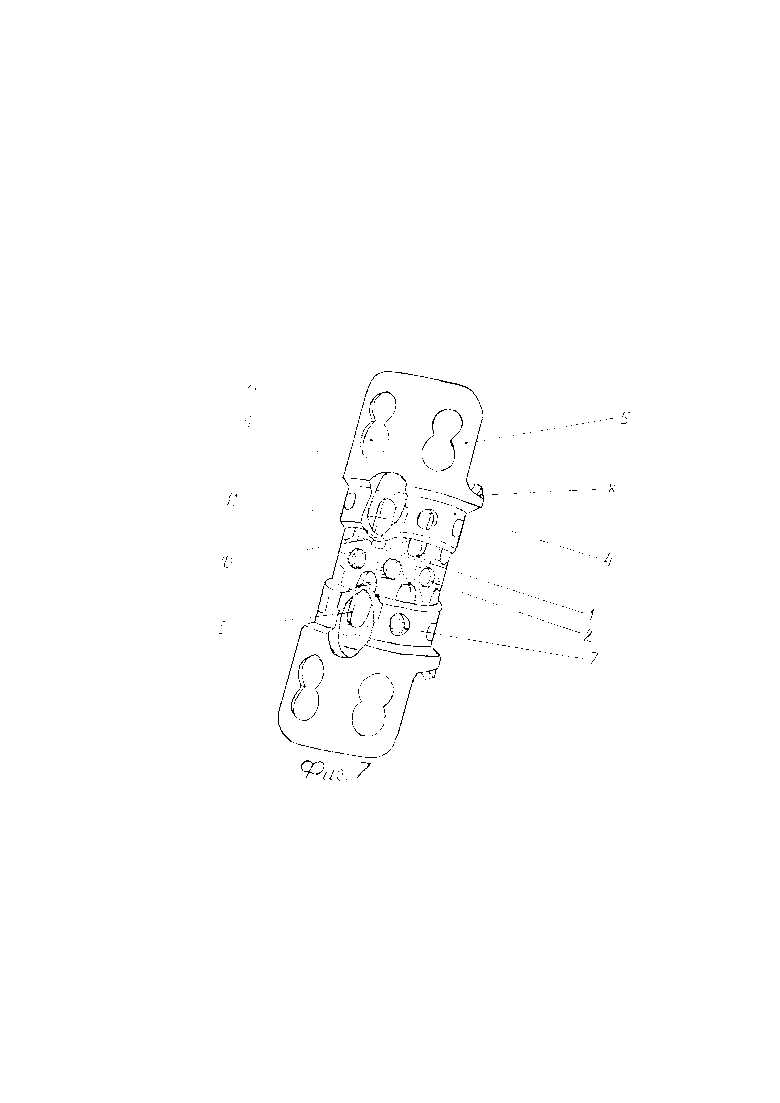
Предложенный способ переднего спондилодеза может быть реализован с помощью телескопического эндопротеза, конструкция и принцип действия которого поясняется иллюстрационным материалом, на котором изображено следующее: фиг. 1 - конструкция телескопического имплантата позвонка, вид сбоку; фиг. 2 - то же самое, вид сзади; фиг. 3 - то же самое, вид с торца; фиг. 4 - то же самое, вид в плане; фиг. 5 - телескопический имплантат позвонка, подготовленный к установке в позвоночник (шток заполнен наполнителем), вид в плане; фиг. 6 - телескопический имплантат позвонка, окончательно установленный в позвоночник (в состоянии уменьшения его вертикального размера до заданной дистракции); фиг. 7 - схема блокировки заданного положения полукорпусов телескопического имплантата относительно штока.
Телескопический имплантат позвонка, используемый для реализации предложенного способа переднего спондилодеза, содержит центральный цилиндрический пустотелый шток 1 с разнонаправленной (левой и правой) резьбой от центра. В центре штока 1 выполнены отверстия 2 под инструмент (не показанный) для его вращения. Сквозные боковые отверстия в штоке 1 выполнены в виде продольных пазов 3. На шток 1 навинчены полукорпусы 4 с внутренней соответствующей разнонаправленной резьбой, к которым неразъемно присоединены Г-образные пластины 5 с парными отверстиями 6 под винты (не показаны). Цилиндрические полукорпусы 4 имеют радиальные сквозные боковые отверстия 7, расположенные ярусами. На внешних торцах полукорпусов 4 сформированы зубцы 8, препятствующие смещению полукорпусов 4 от первоначально выбранного места их пространственной ориентации в костном дефекте, образовавшемся после резекции тела позвонка (в резецированном участке позвоночника) путем внедрения зубцов 8 в тела смежных позвонков. В полукорпусах 4 со стороны Г-образных пластин 5 выполнены окна 9, через которые можно добавлять во внутрь штока 1 дополнительные порции наполнителя в случае необходимости.
Перемычка 10 в полукорпусе 4 между окном 9 и внутренним его торцом имеет в центре минимальную толщину, получаемую в процессе формирования самой перемычки 10, например, шлифованием или фрезерованием (процесс стесывания до получения «лыски»). Благодаря выполнению в штоке 1 отверстий в виде продольных пазов 3, предельно упрощается процедура совмещения перемычек 10 в полукорпусах 4 с указанными пазами 3 при блокировании длины предложенного телескопического имплантата.
Предложенный способ переднего спондилодеза с помощью описанного выше телескопитеского имплантата осуществляют следующим образом.
Сначала проводят магнитно-резонансную томографию позвоночника пациента, по результатам которой изучают его повреждения. Затем строят трехмерную виртуальную модель позвоночника с использованием любого известного программного продукта, на которой виртуально осуществляют резекцию поврежденного позвонка и определяют физические параметры имплантата, определяют параметры гибкости позвоночника и способность его к дистракции, размеры и конфигурацию ложа, а также определяют необходимое количество антимиграционных винтов, их длину и направление вкручивания. Этот подготовительный период позволяет смоделировать и учесть все параметры имплантата и надежность его размещения в позвоночнике пациента. После этого, по полученным параметрам подбирают наиболее подходящий для данного случая телескопический имплантат и подготавливают его к трансплантации - вкручивают полукорпусы 4 на определенный уровень, заполняют шток 1 наполнителем 11, подгибают Г-образные полупластины 5 на требуемый угол и проч. По завершению подготовительного этапа, начинают непосредственное хирургическое лечение позвоночника пациента.
После выполнения доступа к необходимому сегменту позвоночника одним из известных способов, осуществляют резекцию элементов переднего опорного комплекса на необходимом промежутке. После этого заведомо подготовленный телескопический имплантат, предварительно заполненный костными фрагментами или иным наполнителем 11, в исходном положении (полукорпусы 4 вкручены в шток 1 до такого уровня, что торцы последнего находятся выше уровня зубцов 8 та торцах полукорпусов 4) располагают в межтеловом промежутке между верхним и нижним смежными позвонками вместо извлеченного сегмента (или в ложе, если оно было сформировано по предварительно определенным размерам). Далее, удерживая конструкцию имплантата с помощью специального ключа, осуществляют вращение штока 1 за центральные отверстия 2. При этом полукорпусы 4 перемещаются вдоль штока 1 в разные стороны благодаря наличию в них разнонаправленной резьбы, и происходит раздвижение конструкции имплантата (его общая длина увеличивается). Зубцы 8 углубляются в костную ткань смежных позвонков. Раздвижение имплантата продолжают до достижения необходимой для восстановления деформации позвоночника. Таким образом достигается оптимальная запрессовка имплантата в межтеловом промежутке и запланированная деформация позвоночника. Полукорпусы 4 фиксируют относительно штока 1 путем прогиба перемычек 10 во внутрь пазов 3. После этого в отверстия Г-образных полупластин 5 полукорпусов 4 устанавливают винты, с помощью которых указанные полупластины 5 прикручивают к смежным позвонкам, окончательно фиксируя имплантат. Затем рану послойно ушивают. Таким образом, за счет постепенного раздвижения самого имплантат достигается необходимая дистракция и деформация позвоночника в заданном направлении. Со временем, прилегающая к имплантату ткань проникает через отверстия в полость штока 1, где соединяется с костным наполнителем 11, находящимся в полости штока 1, благодаря чему обеспечивается крепкая и надежная стабилизация имплантата между телами смежных позвонков и полное восстановление опорной способности позвонка.
Заявленное техническое решение проверено на практике. Предложенный способ переднего спондилодеза не содержит в своем составе ни одной технологической операции или действий хирургов, электронного оборудования или программного обеспечения, которые невозможно было бы осуществить на современном этапе развития науки и техники, в частности, в области нейрохирургии, следовательно, промышленно применимо, имеет технические и иные преимущества перед известными аналогами, что подтверждает возможность достижения технического результата заявляемым объектом. В известных источниках патентной и иной научно-технической информации не выявлено подобных способов спондилодеза с указанной в предложении совокупностью существенных признаков, поэтому предложенное техническое решение соответствует критерию «новизна».
Существенное отличие заявленного технического решения от ранее известных заключается в том, что моделирование спондилодезу, выбор оптимальной конструкции, формы и размеров имплантата, конфигурации и размеров ложа (в случае необходимости), количество, длину, и направление вкручивания антимиграционных винтов осуществляется на виртуальной модели позвоночника пациента на подготовительном этапе, а во время оперативного вмешательства осуществляют дистракцию и деформацию позвоночника по заранее полученной виртуальной модели. Указанные отличия, в совокупности, позволяют приобрести новые качества во время проведения спондилодеза, в частности, исключения врачебной ошибки, четко, без лишних действий, эффективно восстанавливать функции позвоночника, свести хирургическое вмешательство к минимуму. Ни один из известных способов спондилодеза, не может одновременно обладать всеми перечисленными свойствами, поскольку не одержат в своем составе всей совокупности заявленных существенных признаков.
К техническим преимуществам заявленного технического решения, по сравнению с прототипом, можно отнести следующее:
- возможность с учетом индивидуальных особенностей позвоночника пациента предварительно определить необходимую конструкцию и размеры имплантата за счет виртуального моделирования позвоночника;
- возможность предварительного установления гибкости и дистракционной способности позвоночника по той же причине;
- возможность предварительного установления количества, длины и направления вкручивания антимиграционных винтов по той же причине;
- ускорение процесса хирургического вмешательства из-за отсутствия действий, связанных с подгонкой имплантата и определения уровня принудительной деформации позвоночника;
- упрощение оборудования за счет отказа от использования платформы и робота.
Медицинский эффект от внедрения предложенного технического решения, по сравнению с использованием прототипа, получают за счет ускорения осуществления спондилодеза вследствие сокращения времени на подготовку телескопического имплантата, высокую эффективность оперативного лечения, что способствует ускорению процесса реабилитации больного и полному восстановлению позвоночника.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕСКОПИЧЕСКИЙ ТЕЛОЗАМЕЩАЮЩИЙ ИМПЛАНТАТ ПОЗВОНКА "LAS-3" И СПОСОБ ЕГО ИМПЛАНТАЦИИ | 2016 |
|
RU2663641C2 |
| КОМБИНИРОВАННЫЙ СЕТЧАТЫЙ ЭНДОПРОТЕЗ ПОЗВОНКА "ПАРАЛЛЕЛЕПИПЕД-LAS" | 2015 |
|
RU2657924C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ТЕЛ ПОЗВОНКОВ ПУТЕМ ВВЕДЕНИЯ ИМПЛАНТА | 2020 |
|
RU2743364C1 |
| СПОСОБ КОМБИНИРОВАННОГО ПЕРЕДНЕ-ЗАДНЕГО СПОНДИЛОДЕЗА | 2015 |
|
RU2628044C2 |
| ЗАДНЕ-ЗАДНЕНАРУЖНЫЙ ВНЕБРЮШИННО-ВНЕПЛЕВРАЛЬНЫЙ ДОСТУП К ТЕЛАМ ГРУДОПОЯСНИЧНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2015 |
|
RU2628030C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ САГИТТАЛЬНОГО РАЗМЕРА КОМПРИМИРУЮЩЕГО ФАКТОРА | 2015 |
|
RU2640451C2 |
| Способ хирургического корригирующего спондилодеза на поясничном отделе позвоночника | 2022 |
|
RU2785750C1 |
| Эндопротез тела позвонка для малоинвазивного (торакоскопического) спондилодеза, инструмент для имплантации эндопротеза с фиксирующим устройством и способ установки заявленного эндопротеза при помощи заявленного инструмента и фиксирующего устройства | 2015 |
|
RU2615863C2 |
| СПОСОБ ХИРУРГИЧЕСКОГО ВПРАВЛЕНИЯ СМЕЩЕННОГО ПОЗВОНКА У ПАЦИЕНТОВ С АНТЕСПОНДИЛОЛИСТЕЗОМ В ПОЯСНИЧНОМ ОТДЕЛЕ ПОЗВОНОЧНИКА | 2021 |
|
RU2777246C1 |
| СПОСОБ ЛЕЧЕНИЯ ПОВРЕЖДЕНИЙ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2010 |
|
RU2434598C1 |

Изобретение относится к медицине. Способ переднего спондилодеза включает проведение КТ-сканирования позвоночника пациента, определение необходимых размеров телескопического имплантата и его подгонку, увеличение его размера до достижения оптимальной деформации позвоночника. До оперативного вмешательства проводят магнитно-резонансную томографию позвоночника пациента, по результатам которой строят трехмерную модель позвоночника, по которой виртуально определяют физические размеры реального телескопического имплантата и ложа для его размещения. Определяют параметры гибкости позвоночника и способность его к дистракции. По полученным параметрам подготавливают телескопический имплантат, включая его заполнение костным материалом или биозаменителем. Начинают непосредственно оперативное лечение позвоночника больного, во время которого по предварительно определенным параметрам готовят ложе, в которое устанавливают предварительно подготовленный телескопический имплантат и начинают его удлинять путем вращения штока, преодолевая сопротивление позвоночника. При достижении телескопическим имплантатом предварительно определенной на модели его длины прекращают дальнейшее увеличение его длины и фиксируют телескопический имплантат антимиграционными винтами, местонахождение и направление вкручивания которых предварительно определены на модели. Рану послойно зашивают. Изобретение обеспечивает ускорение осуществления спондилодеза. 1 з.п. ф-лы, 7 ил.
1. Способ переднего спондилодеза, при котором проводят КТ-сканирование позвоночника пациента, определяют необходимые размеры телескопического имплантата и его подгонку, после чего увеличивают его размер до достижения оптимальной деформации позвоночника, отличающийся тем, что до оперативного вмешательства проводят магнитно-резонансную томографию позвоночника пациента, по результатам которой строят трехмерную модель позвоночника, по которой виртуально определяют физические размеры реального телескопического имплантата и ложа для его размещения, определяют параметры гибкости позвоночника и способность его к дистракции, после чего по полученным параметрам подготавливают телескопический имплантат, включая его заполнение костным материалом или биозаменителем, и начинают непосредственно оперативное лечение позвоночника больного, во время которого по предварительно определенным параметрам готовят ложе, в которое устанавливают предварительно подготовленный телескопический имплантат и начинают его удлинять путем вращения штока, преодолевая сопротивление позвоночника, а при достижении телескопическим имплантатом предварительно определенной на модели его длины прекращают дальнейшее увеличение его длины и фиксируют телескопический имплантат антимиграционными винтами, местонахождение и направление вкручивания которых предварительно определены на модели, после чего рану послойно зашивают.
2. Способ переднего спондилодеза по п. 1, отличающийся тем, что в процессе КТ-сканирования позвоночника пациента имитируют коррекцию деформаций позвоночника.
| 0 |
|
SU91699A1 | |
| СПОСОБ ЗАДНЕГО МЕЖТЕЛОВОГО СПОНДИЛОДЕЗА | 2009 |
|
RU2408316C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ, ПО МЕНЬШЕЙ МЕРЕ, ЧАСТИ ГРУДНОГО И/ИЛИ ПОЯСНИЧНОГО ОТДЕЛОВ ПОЗВОНОЧНИКА ЧЕЛОВЕКА К ТАЗУ | 2014 |
|
RU2585733C1 |
| Самоходный погрузчик | 1961 |
|
SU140742A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДНЕЙ СТАБИЛИЗАЦИИ С1-С2 ПОЗВОНКОВ | 2016 |
|
RU2615900C1 |
| US 9241808 B2, 26.01.2016 | |||
| WO 2007139949 A2, 06.12.2007 | |||
| US 8133421 B2, 13.03.2012 | |||
| WO 2009140294 A1, 19.11.2009 | |||
| US 20160007983 A1, 14.01.2016. | |||

