ОБЛАСТЬ ТЕХНИКИ
Это раскрытие относится к радиолокаторам с антенной решеткой.
УРОВЕНЬ ТЕХНИКИ
Формирование диаграммы направленности является объединением радиосигналов из множества ненаправленных антенн для моделирования направленной антенны. Моделированная антенна может нацеливаться электронным образом, хотя физически антенна не движется. В системах связи, формирование диаграммы направленности используется для нацеливания антенны на источник сигнала, чтобы уменьшать помехи и улучшать качество связи. В радиопеленгации, формирование диаграммы направленности может использоваться для управления направлением антенны, чтобы определять направление источника сигнала.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Способ разрешения выявления дифракционных лепестков включает в себя, посредством контроллера, осуществление выборки выходного сигнала, указывающего отражение сигнала от цели, с каждого из множества элементов антенны, объединение выходного сигнала с первого подмножества элементов антенны, выбранных для формирования первого раскрыва, чтобы определять первое составное отражение сигнала от цели для первого раскрыва, и объединение выходного сигнала со второго подмножества элементов антенны, выбранных для формирования второго раскрыва, чтобы определять второе составное отражение сигнала от цели для второго раскрыва, Способ дополнительно включает в себя, посредством контроллера, обработку выходных сигналов, определяющих первое и второе составные отражения сигнала, чтобы идентифицировать разность фазового угла между первым и вторым составными отражениями сигнала, определение угла прихода для цели на основании разности фазового угла и смещения фазового центра между раскрывами, и вывод индикатора нахождения на пути в ответ на угол прихода, являющийся меньшим, чем пороговый угол, для данной дальности до цели.
Способ дополнительно состоит в том, что выводят индикатор нахождения вне пути в ответ на угол прихода, являющийся большим, чем пороговый угол.
Раскрывы могут иметь одинаковое количество элементов антенны.
Разность фазового угла может быть пропорциональна угловому направлению на цель относительно равносигнального направления раскрывов.
Антенная система включает в себя решетку элементов антенны и контроллер. Контроллер, в ответ на угол прихода для цели, являющийся меньшим, чем пороговый угол, для данной дальности до цели, выводит индикатор нахождения на пути. Угол прихода основан на разности фазового угла, выведенной из данных, определяющих первый и второй составные отражения сигнала от цели, связанные с первым и вторым раскрывами соответственно, и смещение фазового центра между раскрывами. Первый и второй раскрывы сформированы, соответственно, из первого и второго подмножеств элементов антенны.
Контроллер дополнительно запрограммирован с возможностью, в ответ на угол прихода, являющийся большим, чем пороговый угол, выводить индикатор нахождения вне пути.
Раскрывы могут быть сформированы из одинакового количества элементов антенны.
Раскрывы могут быть сформированы из разных количеств элементов антенны.
Элементы антенны, формирующие первый раскрыв, являются прилегающими друг к другу, и при этом, элементы антенны, формирующие второй раскрыв, являются прилегающими друг к другу.
Разность фазового угла может быть пропорциональна угловому направлению на цель относительно равносигнального направления раскрывов.
Контроллер дополнительно запрограммирован с возможностью выполнения фазовой моноимпульсной обработки данных для выведения разности фазового угла.
Транспортное средство включает в себя решетку элементов антенны и контроллер. Контроллер избирательно выводит индикаторы нахождения на пути на основании фазовой моноимпульсной обработки выходного сигнала, определяющего первое и второе составные отражения сигнала из соответствующих первого и второго раскрывов, каждый из которых сформирован из разного подмножества элементов антенны. Первое и второе составные отражения сигнала, каждое, указывает основной лепесток или дифракционный лепесток.
Подмножества могут быть такими, что раскрывы имеют смещение фазового центра между ними.
Раскрывы могут быть сформированы из одинакового количества элементов антенны.
Раскрывы могут быть сформированы из разного количества элементов антенны.
Элементы антенны, формирующие первый раскрыв, являются прилегающими друг к другу, и при этом, элементы антенны, формирующие второй раскрыв, являются прилегающими друг к другу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
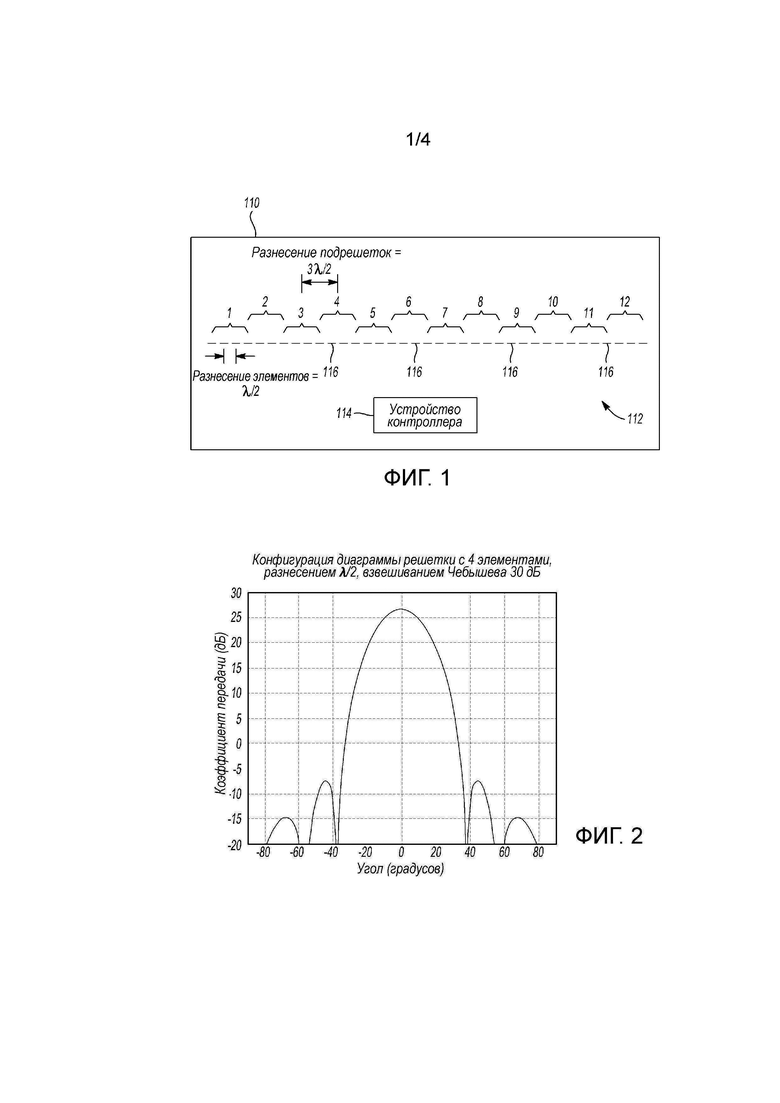
Фиг. 1 - принципиальная схема транспортного средства, включающего в себя решетку из подрешеток для использования при цифровом формировании диаграммы направленности.
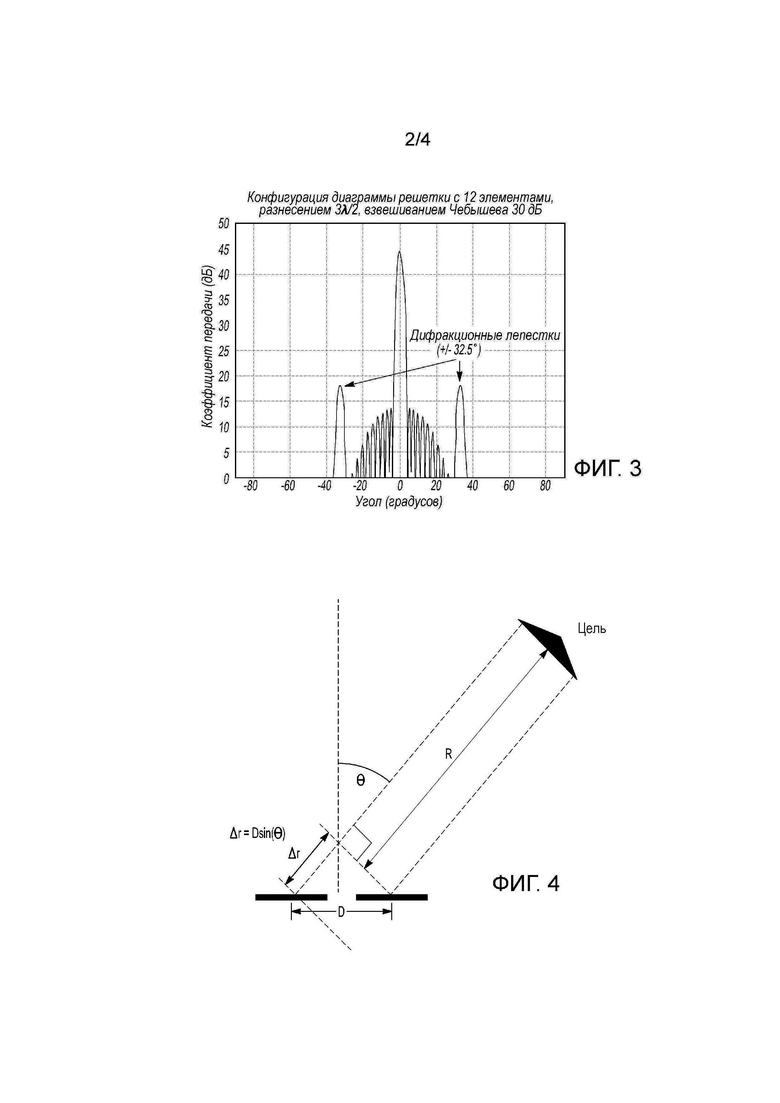
Фиг. 2 - конфигурация диаграммы направленности с коэффициентом передачи в зависимости от угла для решетки из четырех элементов с разнесением λ/2 и весовыми коэффициентами Чебышева 30 дБ.
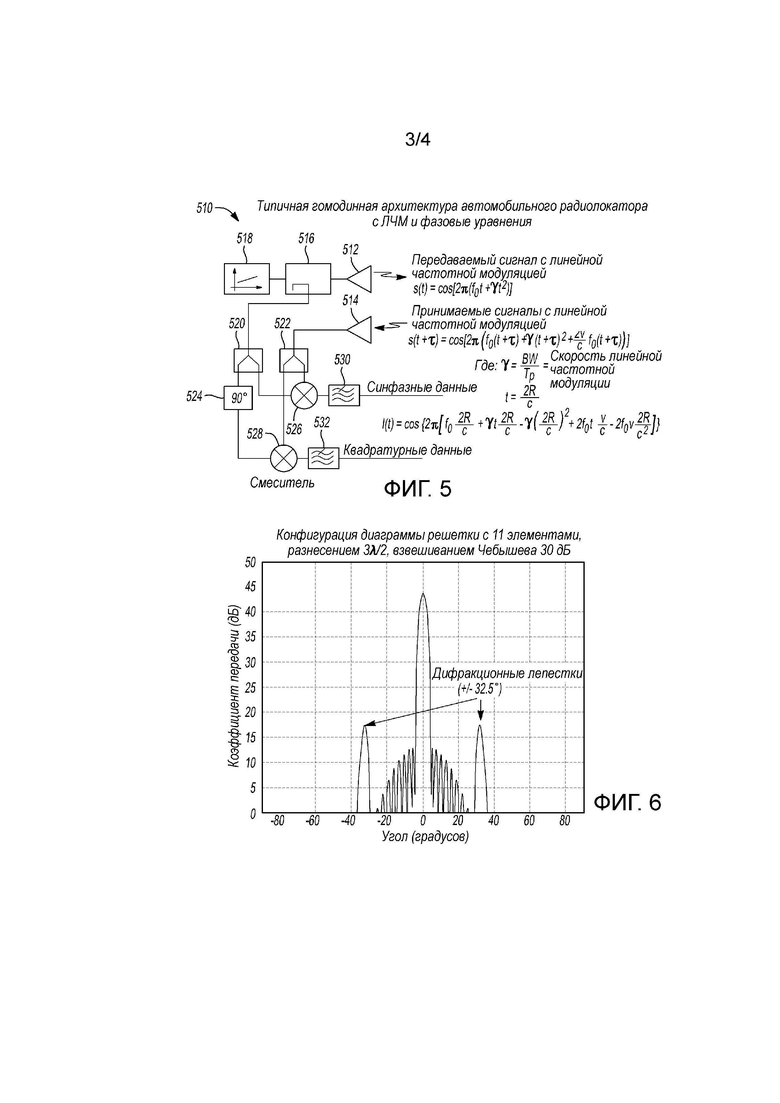
Фиг. 3 - конфигурация диаграммы направленности с коэффициентом передачи в зависимости от угла для решетки из двенадцати элементов с разнесением 3λ/2 и весовыми коэффициентами Чебышева 30 дБ.
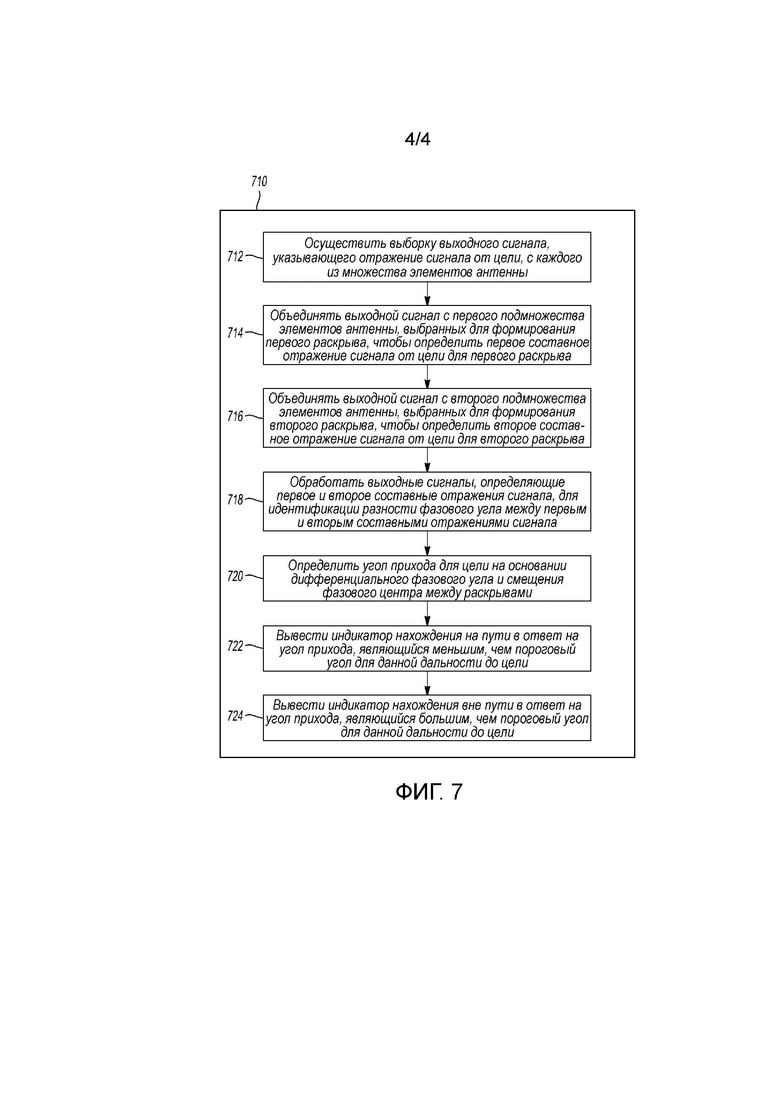
Фиг. 4 - принципиальная схема моноимпульсной геометрии.
Фиг. 5 - принципиальная схема типичной архитектуры гомодинного автомобильного радиолокатора и связанных уравнений фазы сигнала для линейной ЧМ-модуляции.
Фиг. 6 - конфигурация диаграммы направленности с коэффициентом передачи в зависимости от угла для решетки из одиннадцати элементов с разнесением 3λ/2 и весовыми коэффициентами Чебышева 30 дБ.
Фиг. 7 - блок-схема последовательности операций способа алгоритма для принятия решения, являются ли составные отражения сигнала указывающими на основной лепесток или дифракционный лепесток.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления настоящего раскрытия описаны в материалах настоящей заявки. Должно быть понятно, однако, что раскрытые варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно должны определять масштаб; некоторые признаки могли быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения.
Антенные решетки обычно используются в радиолокационных системах и, в частности, автомобильных радиолокационных системах. (Эти системы часто применяют импульсную доплеровскую обработку с цифровым формированием диаграммы направленности антенны (DBF).) Многие современные и унаследованные системы используют этот тип антенны, для того чтобы пользоваться преимуществом ее тонкого профиля и эффективного излучения. Кроме того, при использовании многочисленных каналов приема из отдельных элементов или групп элементов (так называемых подрешеток), технологии DBF могут применяться для формирования диаграмм направленности в многочисленных направлениях одновременно посредством применения разных комплексных весовых коэффициентов к одному и тому же набору данных.
При формировании решетки, элементы должны быть разнесены на менее чем на половину длины волны наивысшей представляющей интерес частоты, для того чтобы избегать того, что называется дифракционными лепестками. Эти лепестки по существу являются копиями главного лепестка диаграммы направленности, которые появляются под углом, который пропорционален коэффициенту субдискретизации. По существу, когда решетка подвергается пространственной субдискретизации, появляются дифракционные лепестки.
Есть различные причины для не разнесения элементов на менее чем половину длины волны. Одна из причин состоит в том, что, для того чтобы элемент был эффективным излучателем, он должен быть протяженностью по меньшей мере в четверть длины волны. Разнесение таких излучающих элементов на половину длины волны может оказываться трудным и, к тому же, может приводить к нежелательной связи между смежными элементами, оказывая неблагоприятное влияние на общую конфигурацию диаграммы направленности. К тому же, если собираются применяться технологии DBF, есть ограничение на количество каналов, которые могут поддерживаться в приемнике, что, в свою очередь, ограничивает общий размер решетки, а отсюда, ширину диаграммы направленности и коэффициент передачи, которые могут быть реализованы. Кроме того, применяются так называемые подрешетки, которые являются подгруппировками элементов, и таковые могут не перекрываться беспрепятственно, что вновь приводит действующее разнесение элементов к большему, чем половина длины волны - даже если фактическое разнесение между элементами является меньшим, чем половина длины волны. Значит, в многих случаях, действующее разнесение элементов является большим, чем половина длины волны, причем прикладываются все усилия, чтобы иметь разнесение, выбранное для того, чтобы размещать дифракционные лепестки вне представляющего интерес поля обзора (FOV), которое обязательно является меньшим, чем 180 градусов в большинстве случаев.
К сожалению, как раз то, что дифракционные лепестки не находятся в пределах представляющего интерес FOV, делает их восприимчивыми к захвату отражений от объектов за пределами FOV. Объекты, захваченные дифракционным лепестком (или любым боковым лепестком, коли на то пошло), были бы неразличимы от объекта, захваченного в основном лепестке диаграммы направленности антенны, и, отсюда, могли бы ошибочно казаться представляющим интерес объектом.
Одно из средств подавления дифракционных лепестков, которое часто применяется в автомобильных радиолокационных системах, включает в себя использование отдельных передающей и приемной антенн. В этой технологии, диаграмма направленности передающей антенны типично предназначена для облучения представляющего интерес FOV, тем временем DBF применяется к приемной антенне для формирования узких диаграмм направленности с более высоким коэффициентом передачи в многочисленных направлениях, покрывающих представляющее интерес FOV. Передающая антенна дополнительно сконструирована, из условия чтобы нули в ее конфигурации диаграммы соответствовали положению дифракционных лепестков в приемных диаграммах направленности. Это довольно эффективно, но объекты с большим радиолокационным поперечным сечением по-прежнему могут выявляться дифракционными лепестками и требовать дополнительного подавления.
Амплитудное взвешивание, применяемое в качестве части обработки DBF, может уменьшать величину дифракционных лепестков, но необходимо быть внимательным, так как некоторые комплексные весовые коэффициенты могут усиливать дифракционные лепестки. К тому же, это может быть эффективным в комбинации с формированием нулей передающей диаграммы направленности, упомянутым выше. К сожалению, некоторые цели с большим радиолокационным поперечным сечением (RCS) по-прежнему могут выявляться в дифракционном лепестке, и требуются дополнительные технологии подавления.
Подрешетки типично используются для предоставления эффективной конфигурации диаграммы элементов, которая помогает бороться с дифракционным лепестком. Даже если разнесение подрешеток может вызывать более серьезные дифракционные лепестки, завал результирующей конфигурации диаграммы подрешетки (которая является эффективной конфигурацией диаграммы элементов для решетки из подрешеток) может быть весьма эффективным в борьбе с дифракционными лепестками.
Некоторые технологии подавления выявлений дифракционного лепестка (или, как правило, бокового лепестка), предложенные в материалах настоящей заявки, использует преимущества технологии DBF. Поскольку данные многоканального приема имеются в распоряжении у процессора, могут применяться разные взвешивания. Таким образом, в решетке из N элементов (или подрешеток), можно применять взвешивание к элементам, из условия чтобы один из элементов практически удалялся из решетки, формируя решетку, которая является меньшей на один элемент (или подрешетку). Это будет иметь слегка большую ширину диаграммы направленности вследствие меньшего размера решетки, но, поскольку разнесение элементов (или подрешеток) является прежним, дифракционные лепестки будут возникать в тех же самых угловых положениях. Значит, цель в исходном дифракционном лепестке полной антенной решетки также будет расположена в дифракционном лепестке синтезированной конфигурации диаграммы направленности меньшей решетки.
Далее, если меньшая решетка (подраскрыв) синтезирована с использованием элементов (или подрешеток) с 1 по N-1, и еще один подраскрыв сформирован с использованием элементов (или подрешеток) с 2 по N, который имеет такой же размер, как первая решетка N-1 элементов первого подраскрыва, две решетки будут иметь дифракционные лепестки в идентичном угловом положении. Таким образом, обнаружение цели, происходящее из дифракционного лепестка в одном из подраскрывов, также будет выявляться в дифракционном лепестке другого подраскрыва. Выявленная цель дифракционного лепестка, находящаяся не по центру от представляющего интерес направления (угла нацеливания главного лепестка диаграммы направленности), будет иметь разность фаз, которая пропорциональна смещению фазовых центров двух подраскрывов и углу вне представляющего интерес направления. В действительности, две моноимпульсных приемных решетки синтезируются с помощью DBF, и, посредством применения моноимпульсных технологий, выявление, происходящее из дифракционных лепестков, может устраняться из рассмотрения в качестве находящегося в представляющем интерес направлении, таким образом, устраняя ложные вводы в действие контрмер.
Эта технология может иметь относительно низкую стоимость в показателях обработки, поскольку она может избирательно применяться только в случаях выявления находящихся на пути опасностей. К тому же, обработке было бы нужно применяться только для выявления данных в пределах элементов разрешения дальности/доплеровского сдвига, где указывается находящийся на пути объект. Кроме того, весовые коэффициенты для синтезированных меньших решеток могли бы быть предопределенными, так что простая справочная таблица могла бы применяться для эффективного расчета.
В качестве расширения для этого способа, исходная диаграмма направленности, сформированная с использованием всех N элементов, может учитываться наряду с двумя подраскрывами, обсужденными выше, которые применяют N-1 элементов, для того чтобы устанавливать набег фазы представляющей интерес цели. Крутизна этого набега фазы, которая находится выше порогового значения, указывала бы, что она фактически не находится на пути радиолокатора (транспортного средства).
Если амплитуда цели такова, что она в самой малой степени выявляется в подраскрывах с использованием N-1 элементов, по-прежнему может быть возможным выполнять моноимпульсное определение нахождения на пути или нахождения вне пути с использованием исходной диаграммы направленности полного раскрыва (всех N элементов) наряду с одним из подраскрывов, сформированных N-1 элементами, до тех пор, пока она выявляется в по меньшей мере одном из подраскрывов N-1 элементов. (Если цель находится на пути, фазовый угол, связанный с целью, должен быть главным образом равным во всех сформированных диаграммах направленности. Различия фазового угла от одной диаграммы направленности к другой, указывали бы, что цель фактически не находится на пути и может быть проигнорирована.)
Кроме того, если амплитуда цели достаточно велика, простое отсутствие выявления в том же самом элементе разрешения дальности/доплеровского сдвига в подраскрывах было бы достаточным для исключения ее из находящихся на пути целей, поскольку цели достаточной амплитуды должны безусловно выявляться в главном лепестке диаграммы направленности подрешетки. Достаточная амплитуда была бы разностью коэффициента передачи между исходным раскрывом и подраскрывом выше порогового значения выявления исходной диаграммы направленности.
В качестве примера реализации, рассмотрим автомобильное транспортное средство 110, включающее в себя автомобильную радиолокационную систему 112. Автомобильная радиолокационная система 112 включает в себя устройство 114 контроллера на связи с элементами 116 антенны, формирующими решетку, и использует каскадную передающую диаграмму направленности (диаграмма направленности облучает все намеченное FOV). Решетка, в этом примере, является приемной антенной с равномерной линейной решеткой (ULA), применяющей DBF. Приемная решетка имеет диаграмму направленности с постоянным возвышением, и многочисленные диаграммы направленности, формируемые посредством DBF, реализуются многочисленными каналами приема в азимутальном направлении (отсюда, управление направлением диаграммы направленности ограничено азимутальным направлением). Решетка, в этом случае, будет иметь азимутальное разнесение элементов в половину длины волны, но элементы 116 будут объединяться в подрешетки из 4 элементов, причем, каждая подрешетка совместно использует один элемент с соседней подрешеткой (подрешетки имеют одноэлементное перекрытие), давая в результате подрешетки, имеющие разнесение фазовых центров в 3/2 длины волны. Подрешетки, конечно, могут иметь любое требуемое количество элементов, такое как 1, 2, 5, и т. д., и совместно использовать любое требуемое количество элементов.) Здесь решетка будет включать в себя 12 подрешеток (пронумерованных с 1 по 12). Азимутальным направлением является левое/правое от края до края страницы с направлением возвышения, являющимся направлением в/из страницы. Результирующая конфигурация диаграммы антенны находилась бы от решетки в направлении верхней части страницы.
Отметим, что подрешетки сформированы в конструкции фидеров и имеют определенное аппаратными средствами взвешивание амплитуды, применяемое для того чтобы помогать контролировать уровни боковых лепестков в результирующих конфигурациях диаграммы подрешетки (это помогает регулировать уровни дифракционных лепестков). Взвешивание, в этом случае, является окном Чебышева с относительным ослаблением бокового лепестка на 30 дБ, и результирующая конфигурация диаграммы подрешетки показана на фиг. 2.
Далее, направленная прямо вперед диаграмма направленности (0 градусов), сформированная 12 подрешетками, объединенными с использованием DBF и, вновь, взвешивания Чебышева с ослаблением бокового лепестка на 30 дБ, показана на фиг 3. Обратите внимание, что дифракционные лепестки находятся на +/-32,5 градусах.
В моноимпульсной антенне, общая идея состоит в том, что два в основном идентичных раскрыва с физически смещенными фазовыми центрами используются для оценивания угла у цели. Это изображено на фиг. 4.
Если рассматривают цель под углом θ, как показано, расстояние от фазового центра одного раскрыва до цели будет отличаться от расстояния от фазового центра другого раскрыва до цели на величину, которая является функцией разнесения фазовых центров (D) раскрывов. Предполагается, что общее расстояние до цели является очень большим относительно разнесения (D) фазовых центров раскрывов и, по существу, разность дальности до цели может оцениваться согласно
Отметим, что, когда θ=0, Δr=0.
К тому же, отметим, что, для того чтобы сохранять общий физический раскрыв приемлемого размера, а также чтобы избегать неоднозначностей фазы для относительно больших представляющих интерес углов, разность дальности мала по сравнению с элементом разрешения дальности. Отсюда, эта разность дальности не может измеряться непосредственно радиолокатором. Взамен, разность дальности придает разность фаз отраженным сигналам из двух раскрывов, которая прямо пропорциональна разности дальности.
Фиг. 5 показывает гомодинную архитектуру, которая весьма обычна для автомобильной радиолокационной системы 510, наряду с фазой основного диапазона сигнала от цели на дальности R с относительной скоростью v для внутриимпульсной линейной частотной модуляции. В этом примере, автомобильная радиолокационная система 510 включает в себя антенны 512, 514, волноводный ответвитель 516, управляемый напряжением генератор 518, делители 520, 522 мощности, фазосдвигающее устройство 524, смесители 526, 528 и фильтры 530, 532 нижних частот. Управляемый напряжением генератор 518 и антенна 512 скомпонованы, из условия чтобы антенна передавала сигнал с линейной частотной модуляцией. Волноводный ответвитель 516, который расположен между управляемым напряжением генератором 518 и антенной 512, направляет сигнал в делитель 520 мощности. Выходной сигнал из делителя 520 мощности направляется в фазосдвигающее устройство 524 и смеситель 526. Выходной сигнал из фазосдвигающего устройства 524 направляется в смеситель 528. Антенна 514 направляет принятые сигналы с линейной частотной модуляцией в делитель 522 мощности. Выходной сигнал из делителя 522 мощности направляется в смесители 526, 528. Выходной сигнал из смесителей 526, 528 соответственно направляется в фильтры 530, 532 нижних частот. Как результат, фаза отраженного сигнала для цели на дальности R имеет значение

А фаза отраженного сигнала для той же самой цели на дальности R+Δr (с той же самой относительной скоростью) имеет значение

Разность фаз между этими двумя отраженными сигналами, в таком случае, имеет значение

Замена D sinθ для ∆r дает

что непосредственно соотносит угол у цели с разностью фаз между отраженными сигналами из двух моноимпульсных раскрывов. Вышеприведенное может быть упрощено пренебрежением крайне малых вкладов от членов c2, так что имеем
и
Из одиночного раскрыва, применяющего DBF, два практически отдельных раскрыва могут быть сформированы посредством применения надлежащих взвешиваний. В данном примере раскрыва из двенадцати элементов, со ссылкой на фиг. 1, взвешивание для решетки из одиннадцати элементов может применяться к подрешеткам с 1 по 11, тем временем, взвешивая подрешетку 12, чтобы была нулевой. То же самое взвешивание одиннадцати элементов затем может применяться к подрешеткам со 2 по 12, тем временем, взвешивая подрешетку 1, чтобы была нулевой. (Диаграммы направленности, сформированные в каждом случае, будут нацелены в одном и том же направлении и иметь смещение фазового центра в один интервал (3λ/2) подрешетки. Конфигурация диаграммы для диаграммы направленности на 0 градусов, сформированной из взвешивания 30 дБ Чебышева одиннадцати элементов, показана на фиг. 6. Отметим, что дифракционные лепестки находятся в таком же относительном положении на +/-32,5 градусов, как взвешенная диаграмма направленности двенадцати элементов на фиг. 3, так что цели в дифракционных лепестках диаграммы направленности решетки из двенадцати элементов также будут появляться в дифракционных лепестках диаграммы направленности одиннадцати элементов.
В других примерах, взвешивания могут применяться, так чтобы раскрывы формировались из отличающихся количеств подрешеток, или так чтобы раскрывы формировались из каждой второй подрешетки (например, подрешеток 1, 3, 5, 7, 9 и 11). Другие сценарии также возможны.
Должно быть осознано, что эта технология могла бы быть расширена, так чтобы могло настраиваться разнесение (D) между сформированными диаграммами направленности. Например, диаграмма направленности может формироваться с использованием подрешеток с 1 по 10, тем временем, взвешивая подрешетки 11 и 12 в качестве нулевых. Затем, подрешетки с 3 по 12 могут иметь прежнее применяемое взвешивание диаграммы направленности, тем временем, устанавливая взвешивания для подрешеток 1 и 2 в ноль. Это давало бы в результате разнесение (D) решетки в два разнесения (3λ) подрешетки. Кроме того, также можно было бы применять такое же взвешивание диаграммы направленности к подрешеткам со 2 по 11 для формирования третьего раскрыва. Разнесение между раскрывами в этом случае имело бы значение одного разнесения (3λ/2) подрешетки. Однако, было был две разности фаз, которые должны иметь линейный набег, который мог бы оказываться полезным для оценивания угла у цели.
Применение весовых функций к элементам решетки DBF не требовало бы экстраординарной дополнительной обработки, так как весовые функции могли бы формироваться заранее и храниться в справочной таблице. К тому же, взвешивания применялись бы к тем же самым наборам собранных данных, значит, не нужно собираться новым данным. В заключение, эта технология может, в некоторых случаях, активизироваться только когда указывается возможное столкновение с целью, и применялась бы только к конкретным элементам разрешения дальности и доплеровского сдвига, где обнаружена цель.
Со ссылкой на фиг. 7, контроллер 710 антенной системы радиолокатора может выполнять операции для принятия решения, являются ли отражения сигнала от цели результатом основного лепестка или дифракционного лепестка. Хотя операции обсуждены последовательно, некоторые могут выполняться одновременно, в ином порядке или пропускаться. На операции 712, осуществляется выборка выходного сигнала, указывающего отражение сигнала от цели с каждого из множества элементов антенны, На операции 714, объединяют выходной сигнал с первого подмножества элементов антенны, выбранных для формирования первого раскрыва, чтобы определять первое составное отражение сигнала от цели для первого раскрыва. На операции 716, объединяют выходной сигнал с второго подмножества элементов антенны, выбранных для формирования второго раскрыва, чтобы определять второе составное отражение сигнала от цели для второго раскрыва. На операции 718, выходные сигналы, определяющие первое и второе составные отражения сигнала, обрабатываются, чтобы идентифицировать разность фазового угла между первым и вторым составными отражениями сигнала. На операции 720, угол прихода для цели определяется на основании разности фазового угла и смещения фазового центра между раскрывами. На операции 722, индикатор нахождения на пути выводится в ответ на угол прихода, являющийся меньшим, чем пороговый угол для данной дальности до цели (например, 11° для 5 метров, 6° для 10 метров, и т.д.). На операции 724, индикатор нахождения вне пути выводится в ответ на угол прихода, являющийся большим, чем пороговый угол, для данной дальности до цели. (Пороговый угол как правило может зависеть от дальности до цели и предсказанного пути транспортного средства.)
Последовательности операций, способы или алгоритмы, раскрытые в материалах настоящей заявки, могут быть подлежащими выполнению или реализованы устройством обработки, контроллером или компьютером, которые могут включать в себя существующий программируемый электронный блок управления или специальный электронный блок управления. Подобным образом, последовательности операций, способы или алгоритмы могут храниться в качестве данных и команд, исполняемых контроллером или компьютером, в многих формах, в том числе, ноне в качестве ограничения, информации, постоянно хранимой на незаписываемом запоминающем носителе, таком как устройства ПЗУ (постоянного запоминающего устройства, ROM), и информации, с возможностью изменения хранимой на записываемом запоминающем носителе, таком как гибкие диски, магнитные ленты, CD (компакт-диски), устройства ОЗУ (оперативного запоминающего устройства, RAM) и другие магнитные и оптические носители. Последовательности операций, способы или алгоритмы также могут быть реализованы в программном исполняемом объекте. В качестве альтернативы, последовательности операций, способы или алгоритмы могут быть воплощены полностью или частично с использованием пригодных аппаратных компонентов, таких как специализированные интегральные схемы (ASIC), программируемые пользователем вентильные матрицы (FPGA), конечные автоматы, контроллеры или другие аппаратные компоненты или устройства, или комбинации аппаратных средств, программных средств и программно-аппаратных компонентов.
Словесные формулировки, используемые в описании изобретения, предпочтительнее являются словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема раскрытия. Как описано ранее, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, рядовые специалисты в данной области техники осознают, что один или более признаков или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т. д. По существу, варианты осуществления, описанные в качестве менее желательных, чем другие варианты осуществления, или реализации предшествующего уровня техники по отношению к одной или более характеристик, не выходят за пределы объема раскрытия и могут быть желательными для конкретных применений.
Изобретение относится к антенной технике. Способ разрешения выявления дифракционных лепестков решетки содержит этапы, на которых: осуществляют выборку выходного сигнала, указывающего отражение сигнала от цели, с каждого из множества элементов антенны, объединяют выходной сигнал с первого подмножества элементов антенны, выбранных для формирования первого раскрыва, чтобы определять первое составное отражение сигнала от цели для первого раскрыва, объединяют выходной сигнал со второго подмножества элементов антенны, выбранных для формирования второго раскрыва, чтобы определять второе составное отражение сигнала от цели для второго раскрыва, обрабатывают выходные сигналы, определяющие первое и второе составные отражения сигнала, чтобы идентифицировать разность фазового угла между первым и вторым составными отражениями сигнала, определяют угол прихода для цели на основании разности фазового угла и смещения фазового центра между раскрывами, и выводят индикатор нахождения на пути в ответ на угол прихода, являющийся меньшим, чем пороговый угол, для данной дальности до цели. 3 н. и 13 з.п. ф-лы, 7 ил.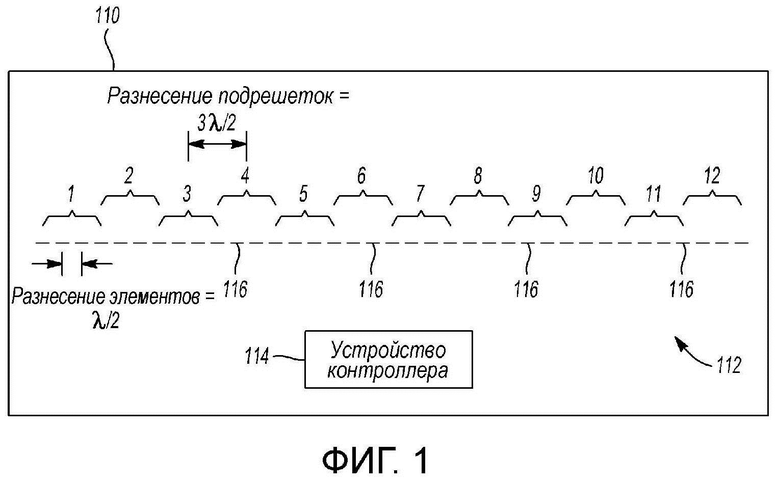
1. Способ разрешения выявления дифракционных лепестков решетки, содержащий этапы, на которых:
посредством контроллера
осуществляют выборку выходного сигнала, указывающего отражение сигнала от цели, с каждого из множества элементов антенны,
объединяют выходной сигнал с первого подмножества элементов антенны, выбранных для формирования первого раскрыва, чтобы определять первое составное отражение сигнала от цели для первого раскрыва,
объединяют выходной сигнал со второго подмножества элементов антенны, выбранных для формирования второго раскрыва, чтобы определять второе составное отражение сигнала от цели для второго раскрыва,
обрабатывают выходные сигналы, определяющие первое и второе составные отражения сигнала, чтобы идентифицировать разность фазового угла между первым и вторым составными отражениями сигнала,
определяют угол прихода для цели на основании разности фазового угла и смещения фазового центра между раскрывами, и
выводят индикатор нахождения на пути в ответ на угол прихода, являющийся меньшим, чем пороговый угол, для данной дальности до цели.
2. Способ по п. 1, дополнительно состоящий в том, что выводят индикатор нахождения вне пути в ответ на угол прихода, являющийся большим, чем пороговый угол.
3. Способ по п. 1, в котором раскрывы имеют одинаковое количество элементов антенны.
4. Способ по п. 1, в котором разность фазового угла пропорциональна угловому направлению на цель относительно равносигнального направления раскрывов.
5. Антенная система, выполненная с возможностью осуществления способа по любому из пп. 1-4, содержащая:
решетку элементов антенны; и
контроллер, запрограммированный с возможностью, в ответ на угол прихода для цели, являющийся меньшим, чем пороговый угол для данной дальности до цели, вывода индикатора нахождения на пути, при этом угол прихода основан на (i) разности фазового угла, выведенной из данных, определяющих первое и второе составные отражения сигнала от цели, связанные с первым и вторым раскрывами соответственно, причем первый и второй раскрывы сформированы из первого и второго подмножеств элементов антенны, и (ii) смещении фазового центра между раскрывами.
6. Система по п. 5, в которой контроллер дополнительно запрограммирован с возможностью, в ответ на угол прихода, являющийся большим, чем пороговый угол, выводить индикатор нахождения вне пути.
7. Система по п. 5, в которой раскрывы сформированы из одинакового количества элементов антенны.
8. Система по п. 5, в которой раскрывы сформированы из разных количеств элементов антенны.
9. Система по п. 5, в которой элементы антенны, формирующие первый раскрыв, являются прилегающими друг к другу, и при этом элементы антенны, формирующие второй раскрыв, являются прилегающими друг к другу.
10. Система по п. 5, в которой разность фазового угла пропорциональна угловому направлению на цель относительно равносигнального направления раскрывов.
11. Система по п. 5, в которой контроллер дополнительно запрограммирован с возможностью выполнения фазовой моноимпульсной обработки данных для выведения разности фазового угла.
12. Транспортное средство, содержащее антенную систему по п. 11, содержащую:
решетку элементов антенны; и
контроллер, запрограммированный с возможностью, в ответ на угол прихода для цели, являющийся меньшим, чем пороговый угол для данной дальности до цели, выводить индикатор нахождения на пути, причем угол прихода основан на фазовой моноимпульсной обработке выходного сигнала, определяющего первое и второе составные отражения сигнала, из соответствующих первого и второго раскрывов, каждый из которых сформирован из разного подмножества элементов антенны.
13. Транспортное средство по п. 12, в котором подмножества являются такими, что раскрывы имеют смещение фазового центра между ними.
14. Транспортное средство по п. 12, в котором раскрывы сформированы из одинакового количества элементов антенны.
15. Транспортное средство по п. 12, в котором раскрывы сформированы из разного количества элементов антенны.
16. Транспортное средство по п. 12, в котором элементы антенны, формирующие первый раскрыв, являются прилегающими друг к другу, и при этом элементы антенны, формирующие второй раскрыв, являются прилегающими друг к другу.
| US 2009015463 A1, 15.01.2009 | |||
| US 6067048 A, 23.05.2000 | |||
| US 2007132642 A1, 14.06.2007 | |||
| US 2013088393 A1, 11.04.2013 | |||
| US 2013176173 A1, 11.07.2013. |

