Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) и предназначено для решения задач картографирования земной поверхности бортовой радиолокационной станцией.
Известен «Способ наблюдения за поверхностью на базе многоканальной бортовой РЛС» [RU 2316786, опубликовано 10.02.2008, МПК G01S 13/42]. Способ заключается в формировании матрицы радиолокационного изображения поверхности в режиме реального луча с электронным сканированием и с быстрым электронным переключением (смещением) луча РЛС по азимуту на величину n-й части ширины ДНА и обработке полученных при каждом положении луча амплитуд отраженных сигналов, при этом амплитуды отраженных сигналов на выходе суммарного канала РЛС у1, у2, …, yn, полученные при n первых положениях луча РЛС в данном i-м элементе разрешения по дальности, суммируют с весами h1, h2, …, hn и оценивают амплитуду χn отраженного сигнала, соответствующего n-й части ДНА при первом положении луча:  , кроме того, при последующих смещениях луча на n-ю часть ДНА амплитуды отраженных сигналов, полученные при последующих положениях луча, суммируют с теми же весами и оценивают параметры χn+1, χn+2, …, χΝ:
, кроме того, при последующих смещениях луча на n-ю часть ДНА амплитуды отраженных сигналов, полученные при последующих положениях луча, суммируют с теми же весами и оценивают параметры χn+1, χn+2, …, χΝ:
затем оценки A(ij)=χ^j амплитуд χj(j=n, n+1, …, N), найденные независимо в каждом i-M(i=1, 2, …,. m) элементе разрешения по дальности, располагают в m строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности  .
.
Данный способ формирует радиолокационное изображение с низким угловым разрешением.
Известен способ картографирования земной поверхности бортовой радиолокационной станцией, основанный на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении луча антенны в заданном секторе углов по азимуту и формировании радиолокационного изображения (РЛИ) поверхности Земли [Многофункциональные радиолокационные системы / под ред. Б.Г. Татарского, М.: «Дрофа», 2007 г., стр. 167-174]. Такой способ формирования радиолокационного изображения земной поверхности называется «Картографирование реальным лучом». Недостатком данного способа является низкое угловое разрешение, в данном случае по азимуту, которое определяется шириной главного луча диаграммы направленности антенны (ДНА) по азимуту.
Наиболее близким является моноимпульсный способ обужения диаграммы направленности для обнаружения целей [Авиационные и радиолокационные комплексы и системы / под ред. П.И. Дудника, М.: «Изд. ВВИА имени проф. Н.Е. Жуковского», 2006 г., стр. 412-438]. В этом способе для обужения главного луча диаграммы направленности используют несколько пространственных каналов формируемых антенной БРЛС, например суммарную и разностную диаграммы направленности [Авиационные и радиолокационные комплексы и системы / под ред. П.И. Дудника, М.: «Изд. ВВИА имени проф. Н.Е. Жуковского», 2006 г., стр. 421-424]. Антенна принимает отраженные сигналы s1(t)=U0(t)F1(γ) и s2(t)=U0(t)F2(γ) по двум разнесенным диаграммам направленности F1(γ) и F2(γ), где t - время, а γ угол наблюдения. Далее БРЛС формируют разностный и суммарный сигналы Up=U0(t)(F1(γ)-F2(γ)), Uc=U0(t)(F1(γ)+F2(γ)).
Выходной обуженный сигнал формируют угловым дискриминатором (фазовым детектором) через отношение сигналов разностной и суммарной диаграмм направленности:

Недостатком моноимпульсного способа является низкая угловая (азимутальная) разрешающая способность наземных объектов при формировании радиолокационного изображения земной поверхности этим способом.
Технической проблемой решаемой предлагаемым изобретением является повышение азимутальной разрешающей способности радиолокационного изображения формируемого БРЛС.
Техническим результатом предлагаемого изобретения является формирование обуженной диаграммы направленности путем совместной когерентной обработки сигналов принятых двумя подрешетками антенной решетки БРЛС.
Сущность предлагаемого изобретения заключается в том, что в процессе сканирования лучом диаграммы направленности антенной решетки земной поверхности когерентно излучают импульсный сигнал, принимают отраженные от земной поверхности сигналы s1(t) и s2(t) первой и второй подрешетками антенной решетки.
Новым в заявляемом способе является то, что после приема стробируют по дальности принятые сигналы s1(t) и s2(t), осуществляют аналого-цифровое преобразование принятых сигналов s1(t) и s2(t), осуществляют когерентное накопление сигналов с формированием массивов комплексных отсчетов сигналов  и
и  , где n - номер строба по дальности из общего числа N стробов, i - номер когерентно накопленного импульса из общего числа I накапливаемых импульсов. Далее определяют M разностей фаз δϕm для M накопленных импульсов комплексных сигналов
, где n - номер строба по дальности из общего числа N стробов, i - номер когерентно накопленного импульса из общего числа I накапливаемых импульсов. Далее определяют M разностей фаз δϕm для M накопленных импульсов комплексных сигналов  и
и  , определяемую разностью дальности до фазовых центров подрешеток относительно наблюдаемого объекта на земной поверхности, где m целое число от 0 до М-1, а M - число когерентно накопленных импульсов, отраженных от участка земной поверхности облучаемого ДН каждой подрешетки. Далее, выбирая каждый раз M импульсов сигналов
, определяемую разностью дальности до фазовых центров подрешеток относительно наблюдаемого объекта на земной поверхности, где m целое число от 0 до М-1, а M - число когерентно накопленных импульсов, отраженных от участка земной поверхности облучаемого ДН каждой подрешетки. Далее, выбирая каждый раз M импульсов сигналов  и
и  со смещением на один импульс в каждом стробе дальности n, K раз компенсируют разность фаз δϕm M принятых импульсов во всех стробах дальности n сигнала
со смещением на один импульс в каждом стробе дальности n, K раз компенсируют разность фаз δϕm M принятых импульсов во всех стробах дальности n сигнала  , формируют M отсчетов комплексно-сопряженного сигнала
, формируют M отсчетов комплексно-сопряженного сигнала  в каждом стробе дальности n, с последующим перемножением M отсчетов скомпенсированного сигнала и M отсчетов комплексно-сопряженного сигнала
в каждом стробе дальности n, с последующим перемножением M отсчетов скомпенсированного сигнала и M отсчетов комплексно-сопряженного сигнала  в каждом стробе дальности n, и K раз суммируют результаты перемножения по M отсчетов, получая каждый раз комплексную амплитуду результирующего сигнала
в каждом стробе дальности n, и K раз суммируют результаты перемножения по M отсчетов, получая каждый раз комплексную амплитуду результирующего сигнала  в каждом стробе дальности n, где k=0…K-1, K=I-М. Затем формируют амплитуды радиолокационного изображения C[n,k] в координатах азимут-дальность по формуле:
в каждом стробе дальности n, где k=0…K-1, K=I-М. Затем формируют амплитуды радиолокационного изображения C[n,k] в координатах азимут-дальность по формуле:
 , где
, где  действительная часть комплексного сигнала
действительная часть комплексного сигнала . Разность фаз δϕm определяют по формуле:
. Разность фаз δϕm определяют по формуле:

где λ - длина волны, В - расстояние между фазовыми центрами подрешеток, Тр - период повторения импульсного сигнала, wck - скорость сканирования лучом ДН каждой подрешетки, m - целое число от 0 до М-1. Количество импульсов M определяется по формуле:
где θ-3dB - ширина луча ДН подрешетки по уровню 3 дБ по азимуту, wck - скорость сканирования лучом ДН каждой подрешетки, Тр - период повторения излучаемого импульсного сигнала.
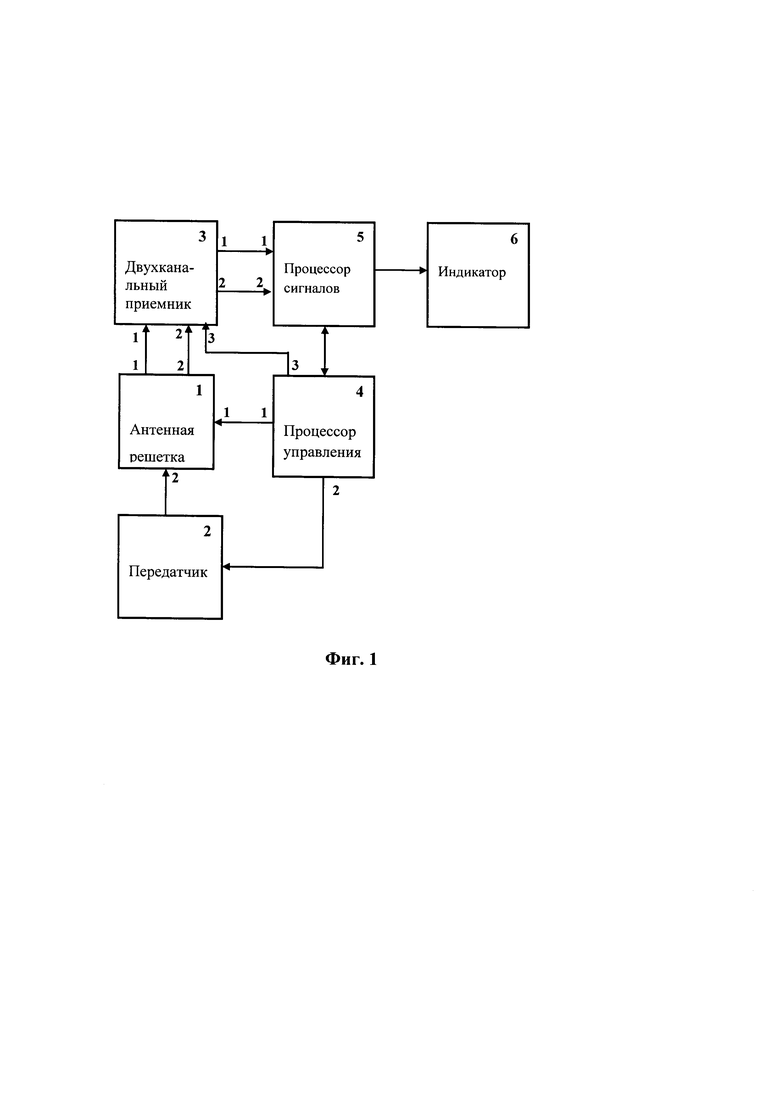
На Фиг. 1 представлена функциональная схема радиолокационной станции, осуществляющей способ.
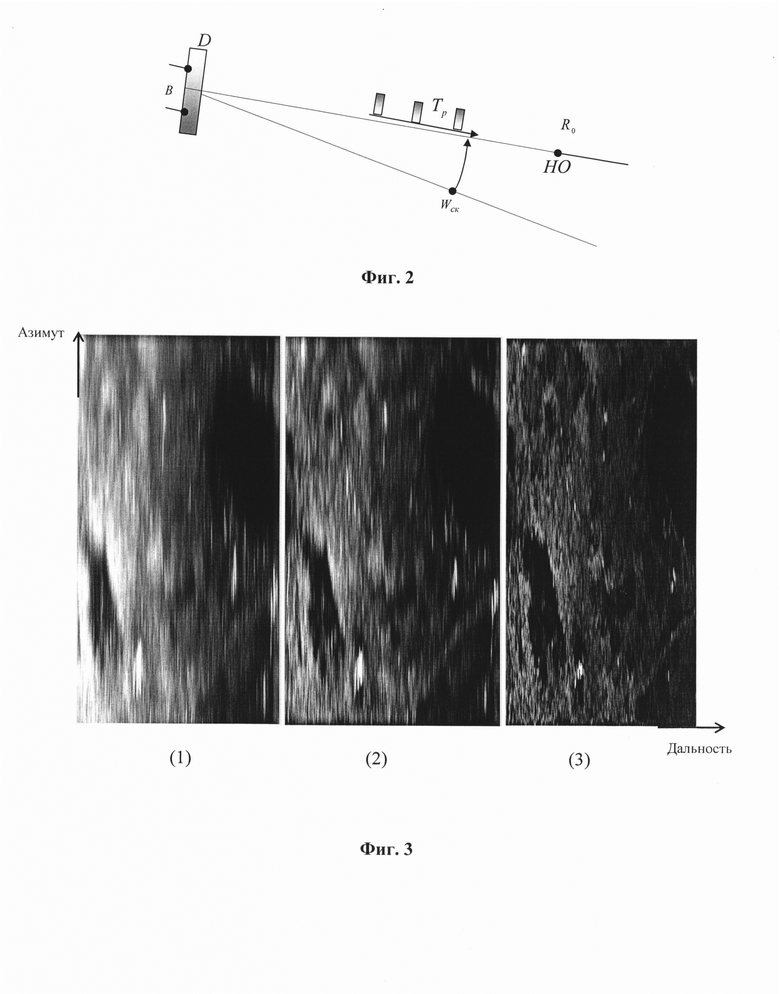
На Фиг. 2 схематично изображен процесс приема сигнала, отраженного от движущегося объекта.
На Фиг. 3 приведены радиолокационные изображения земной поверхности, полученные картографированием реальным лучом - (1), моноимпульсного обужения реального луча - (2) (прототип) и заявляемому способу - (3).
Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой может быть реализован, например, в импульсно-доплеровской БРЛС в режиме работы воздух-поверхность, состоящей из антенной решетки (1), с двумя подрешетками, передатчика (2), двухканального приемника (3), процессора управления (4), процессора сигналов (5), индикатора (6). Первый выход процессора управления (4) соединен с первым входом антенной решетки (1), второй выход процессора управления (4) соединен с входом передатчика (2), выход которого соединен со вторым входом антенной решетки (1). Третий выход процессора управления (4) подключен к третьему входу двухканального приемника (3). Первый выход антенной решетки (1) соединен с первым входом двухканального приемника (3), второй выход антенной решетки (1) соединен со вторым входом двухканального приемника (3). Первый выход двухканального приемника (3) подключен к первому входу процессора сигналов (5), второй выход двухканального приемника (3) подключен ко второму входу процессора сигналов (5). Вход-выход процессора сигналов (5) соединен с входом-выходом процессора управления (4). Выход процессора сигналов (5) соединен с входом индикатора (6).
Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой работает следующим образом.
Процессор управления (4) задает параметры управления антенной решеткой (1) для сканирования лучом ДНА соответствующей зоны обзора по азимуту. В качестве антенной решетки (1) может использоваться фазированная антенная решетка, состоящая из двух подрешеток, и осуществляющая излучение сигнала диаграммой направленности (ДН) сформированной всей апертурой решетки, а прием двумя независимыми ДН, каждая из которых сформирована отдельной подрешеткой.
Антенная решетка (1) формирует однолучевую ДН на передачу и излучает, сформированный передатчиком (2) по команде процессора управления (4), когерентный импульсный радиолокационный сигнал в направлении земной поверхности. В качестве излучаемого сигнала могут использоваться как простые радиоимпульсы, так и сложные модулированные импульсные сигналы - фазокодоманипулированные (ФКМ) или линейно частотно-модулированные (ЛЧМ) и т.д. Первая и вторая подрешетки антенной решетки (1) формируют независимые ДН на прием и принимают отраженные от земной поверхности сигналы s1(t) и s2(t). Схематично прием этих сигналов подрешетками антенной решетки (1) в процессе сканирования поверхности приведен на фигуре 2. На фигуре 2 обозначены wck - скорость сканирования лучом ДН каждой подрешетки, Тр - период повторения излучаемого импульсного сигнала, R0 - дальность до наблюдаемого объекта (НО), D - антенная решетка, В - расстояние между фазовыми центрами подрешеток, α - угол на который перемещается ДН за время t при сканировании.
С первого и второго выходов антенной решетки (1) сигналы s1(t) и s2(t) от первой и второй подрешеток поступают на первый и второй входы двухканального приемника (3). Далее по команде от процессора управления (4) в двухканальном приемнике (3) осуществляют стробирование по дальности сигналов s1(t) и s2(t) и их аналого-цифровое преобразование. Далее полученные отсчеты сигналов в цифровом виде когерентно накапливают в процессоре сигналов (5) с формированием двух массивов  и
и  комплексных отсчетов сигналов размерностью NxI, где i - номер когерентно накопленного импульса из общего числа I накапливаемых импульсов, n - номер строба (отсчета) по дальности из общего числа N стробов дальности. После завершения накопления сигналов в процессоре сигналов (5) запускается их обработка.
комплексных отсчетов сигналов размерностью NxI, где i - номер когерентно накопленного импульса из общего числа I накапливаемых импульсов, n - номер строба (отсчета) по дальности из общего числа N стробов дальности. После завершения накопления сигналов в процессоре сигналов (5) запускается их обработка.
На первом этапе обработки осуществляют определение и компенсацию разности фаз δϕm сигналов принятых подрешетками, определяемой разностью дальности до фазовых центров подрешеток при сканировании относительно наблюдаемого объекта земной поверхности. Для этого определяют разности фаз δϕm (m=0…M-1) для каждого из M накопленных импульсных сигналов, отраженных от определенного участка земной поверхности, облучаемого ДН каждой подрешетки при сканировании, и накопленными в процессоре сигналов (5). Количество отраженных импульсов M зависит от ширины луча ДН подрешетки, скорости сканирования лучом ДН по азимуту и параметров излучаемого радиолокационного сигнала, и может быть определено по формуле:
где θ-3dB - ширина луча ДН подрешетки по уровню 3 дБ по азимуту, wck - скорость сканирования лучом ДН каждой подрешетки, Тр - период повторения излучаемого импульсного сигнала.
Значения разностей фаз δϕm для каждых m-ных импульсов, принятых подрешетками можно определить по формуле:

где λ - длина волны излучаемого сигнала, В - расстояние между фазовыми центрами подрешеток, Тр - период повторения импульсного сигнала, wck - скорость сканирования лучом ДН каждой подрешетки, m - целое число от 0 до М-1. Расстояние между фазовыми центрами подрешеток может быть выбрано как половина ширины антенной решетки (1) в азимутальной плоскости.
Вычисления разности фаз δϕm можно осуществить в процессоре управления (4) и передать полученные данные с его входа-выхода на вход-выход процессора сигналов (5).
Далее осуществляют компенсацию разности фаз δϕm комплексного сигнала  в процессоре сигналов (5) для M отсчетов (принятых импульсов), начиная с 0-го, во всех стробах дальности и таким образом формируют массив скомпенсированного сигнала размерностью NxM по формуле:
в процессоре сигналов (5) для M отсчетов (принятых импульсов), начиная с 0-го, во всех стробах дальности и таким образом формируют массив скомпенсированного сигнала размерностью NxM по формуле:
 , где j - мнимая единица.
, где j - мнимая единица.
Затем формируют сигнал  комплексным сопряжением сигнала
комплексным сопряжением сигнала 
Далее осуществляют свертку M отсчетов массива комплексно-сопряженного сигнала  , начиная с 0-го отсчета (подмассив
, начиная с 0-го отсчета (подмассив  ) и массива скомпенсированного сигнала
) и массива скомпенсированного сигнала  посредством перемножения комплексно-сопряженного сигнала
посредством перемножения комплексно-сопряженного сигнала  и скомпенсированного сигнала
и скомпенсированного сигнала  с суммированием сигналов по M отсчетов по формуле:
с суммированием сигналов по M отсчетов по формуле:

Таким образом, для каждого отсчета (строба) по дальности формируется один отсчет результирующего сигнала.
Далее осуществляют компенсацию разности фаз δϕm комплексного сигнала  в процессоре сигналов (5) для M отсчетов, начиная с 1-го, и таким образом формируют массив скомпенсированного сигнала размерностью NxM по формуле:
в процессоре сигналов (5) для M отсчетов, начиная с 1-го, и таким образом формируют массив скомпенсированного сигнала размерностью NxM по формуле:
 , где j - мнимая единица.
, где j - мнимая единица.
А затем осуществляют свертку M отсчетов массива комплексно-сопряженного сигнала  , начиная с 1-го отсчета (подмассив
, начиная с 1-го отсчета (подмассив  ) и массива скомпенсированного сигнала
) и массива скомпенсированного сигнала  :
:

Таким образом, для формирования полного массива результирующего сигнала  , где k целое число от 0 до K-1, K=I-М, осуществляют расчет массива скомпенсированного сигнала
, где k целое число от 0 до K-1, K=I-М, осуществляют расчет массива скомпенсированного сигнала  размерностью NxM и его свертку с M отсчетами массива
размерностью NxM и его свертку с M отсчетами массива  K раз, каждый раз смещаясь на один отсчет (принятый импульс). В общем виде расчет можно осуществить по формуле:
K раз, каждый раз смещаясь на один отсчет (принятый импульс). В общем виде расчет можно осуществить по формуле:

Массив отсчетов результирующего сигнала  содержит на M отсчетов меньше, чем массивы накопленных сигналов за счет суммирования по M отсчетов.
содержит на M отсчетов меньше, чем массивы накопленных сигналов за счет суммирования по M отсчетов.
При такой обработке за счет фазовой коррекции δϕm устраняется пространственная разность, вызванная разнесением двух фазовых центров подрешеток, при сканировании относительно определенного направления (наблюдаемого объекта). А при перемножении комплексно-сопряженного и скорректированного сигналов устраняется случайная фаза, вызванная переотражением сигнала и фазовые отклонения, вызванные траекторными нестабильностями носителя БРЛС. За счет этого происходит обужение диаграммы направленности антенной решетки. При такой обработке в результирующем комплексном сигнале  основная часть сигнала, содержащая информацию о наблюдаемом объекте, содержится в действительной части комплексного сигнала.
основная часть сигнала, содержащая информацию о наблюдаемом объекте, содержится в действительной части комплексного сигнала.
Далее в процессоре сигналов (5) формируют массив амплитуд радиолокационного изображения C[n,k] в координатах дальность-азимут. Для этого извлекают квадратный корень из модуля действительной части комплексной амплитуды отсчетов результирующего сигнала по формуле:
Далее сформированный массив амплитуд выводится на индикатор (6) в виде уровней яркости радиолокационного изображения и таким образом формируется РЛИ с повышенным разрешением по азимуту.
На Фиг. 3 представлены три радиолокационных изображения (РЛИ), в координатах дальность-азимут. Первое РЛИ получено при амплитудном детектировании отраженного сигнала, принятого по суммарному лучу реальной диаграммы направленности антенной решетки («Картографирование реальным лучом»), второе РЛИ соответствует суммарно-разностной обработке сигнала (прототип), а третье получено заявляемым способом. На третьем РЛИ можно видеть обужение отметок радиоконтрастных объектов и повышение разрешающей способности по азимуту, по сравнению с другими РЛИ.
Таким образом, за счет компенсации фазовых отклонений сигнала путем совместной обработки сигналов, принятых двумя подрешетками антенной решетки, осуществляется повышение угловой разрешающей способности по азимуту по сравнению со способом прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения скорости и направления движения наземных объектов бортовой радиолокационной станцией с антенной решеткой | 2021 |
|
RU2786678C1 |
| Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией | 2018 |
|
RU2691771C1 |
| Способ обнаружения вертолетов бортовой радиолокационной станцией | 2018 |
|
RU2691387C1 |
| Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией | 2017 |
|
RU2660159C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| СПОСОБ ОБУЖЕНИЯ ПРИЕМНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ И МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2014 |
|
RU2599932C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ВЫСОКОГО РАЗРЕШЕНИЯ С АКТИВНОЙ ФАЗИРОВАННОЙ РЕШЕТКОЙ ДЛЯ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2429990C1 |
| Способ измерения угловых координат целей радиолокационной станцией с цифровой антенной решеткой | 2019 |
|
RU2697662C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| Способ формирования диаграммы направленности цифровой антенной решеткой | 2016 |
|
RU2627958C1 |
Использование: изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) и предназначено для решения задач картографирования земной поверхности. Сущность: способ основан на том, что в процессе сканирования лучом диаграммы направленности антенной решетки земной поверхности когерентно излучают импульсный сигнал, принимают отраженные от земной поверхности сигналы s1(t) и s2(t) первой и второй подрешетками антенной решетки. После приема стробируют по дальности принятые сигналы s1(t) и s2(t), осуществляют аналого-цифровое преобразование принятых сигналов s1(t) и s2(t), осуществляют когерентное накопление сигналов с формированием массивов комплексных отсчетов сигналов 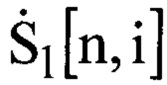 и
и  , где n - номер строба по дальности из общего числа N стробов, 1 - номер когерентно накопленного импульса из общего числа I накапливаемых импульсов. Далее определяют М разностей фаз δϕm для М накопленных импульсов комплексных сигналов
, где n - номер строба по дальности из общего числа N стробов, 1 - номер когерентно накопленного импульса из общего числа I накапливаемых импульсов. Далее определяют М разностей фаз δϕm для М накопленных импульсов комплексных сигналов  и
и  , определяемую разностью дальности до фазовых центров подрешеток относительно наблюдаемого объекта на земной поверхности, где m=0…M-1, а М - число когерентно накопленных импульсов, отраженных от участка земной поверхности облучаемого ДН каждой подрешетки. Далее, выбирая каждый раз М импульсов сигналов
, определяемую разностью дальности до фазовых центров подрешеток относительно наблюдаемого объекта на земной поверхности, где m=0…M-1, а М - число когерентно накопленных импульсов, отраженных от участка земной поверхности облучаемого ДН каждой подрешетки. Далее, выбирая каждый раз М импульсов сигналов  и
и  со смещением на один импульс в каждом стробе дальности n, K раз компенсируют разность фаз δϕm М принятых импульсов во всех стробах дальности n сигнала
со смещением на один импульс в каждом стробе дальности n, K раз компенсируют разность фаз δϕm М принятых импульсов во всех стробах дальности n сигнала  , формируют М отсчетов комплексно-сопряженного сигнала
, формируют М отсчетов комплексно-сопряженного сигнала  в каждом стробе дальности n, с последующим перемножением М отсчетов скомпенсированного сигнала и М отсчетов комплексно-сопряженного сигнала
в каждом стробе дальности n, с последующим перемножением М отсчетов скомпенсированного сигнала и М отсчетов комплексно-сопряженного сигнала  в каждом стробе дальности n, и K раз суммируют результаты перемножения по М отсчетов, получая каждый раз комплексную амплитуду результирующего сигнала
в каждом стробе дальности n, и K раз суммируют результаты перемножения по М отсчетов, получая каждый раз комплексную амплитуду результирующего сигнала  в каждом стробе дальности n, где k=0…K-1, K=I-М. Затем формируют амплитуды радиолокационного изображения C[n,k] в координатах азимут-дальность. Технической проблемой решаемой предлагаемым изобретением является повышение азимутальной разрешающей способности радиолокационного изображения формируемого БРЛС. Технический результат: формирование обуженной диаграммы направленности путем совместной когерентной обработки сигналов принятых двумя подрешетками антенной решетки БРЛС. 2 з.п. ф-лы, 3 ил.
в каждом стробе дальности n, где k=0…K-1, K=I-М. Затем формируют амплитуды радиолокационного изображения C[n,k] в координатах азимут-дальность. Технической проблемой решаемой предлагаемым изобретением является повышение азимутальной разрешающей способности радиолокационного изображения формируемого БРЛС. Технический результат: формирование обуженной диаграммы направленности путем совместной когерентной обработки сигналов принятых двумя подрешетками антенной решетки БРЛС. 2 з.п. ф-лы, 3 ил. 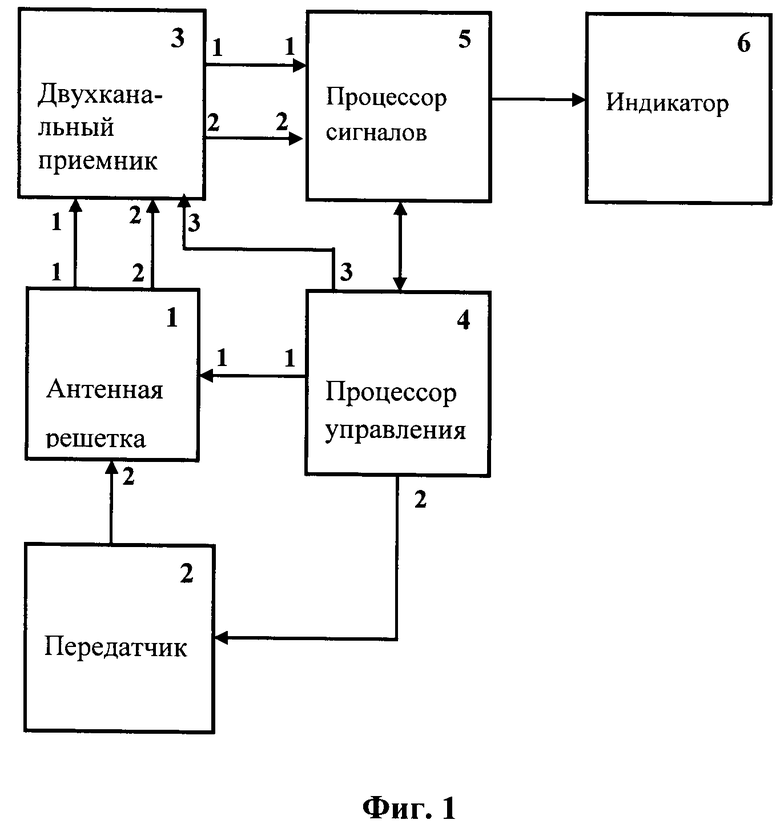
1. Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой, заключающийся в том, что в процессе сканирования лучом диаграммы направленности антенной решетки земной поверхности когерентно излучают импульсный сигнал, принимают отраженные от земной поверхности сигналы s1(t) и s2(t) первой и второй подрешетками антенной решетки,
отличающийся тем, что после приема стробируют по дальности принятые сигналы s1(t) и s2(t),
осуществляют аналого-цифровое преобразование принятых сигналов s1(t) и s2(t),
осуществляют когерентное накопление сигналов s1(t), s2(t) с формированием массивов комплексных отсчетов сигналов  и
и  , где n - номер строба по дальности из общего числа N стробов, i - номер когерентно накопленного импульса из общего числа I накапливаемых импульсов,
, где n - номер строба по дальности из общего числа N стробов, i - номер когерентно накопленного импульса из общего числа I накапливаемых импульсов,
определяют M разностей фаз δϕm для M накопленных импульсов комплексных сигналов  и
и  , определяемую разностью дальности до фазовых центров подрешеток относительно наблюдаемого объекта, где m число от 0 до М-1, а M - число когерентно накопленных импульсов, отраженных от участка земной поверхности облучаемого ДН каждой подрешетки,
, определяемую разностью дальности до фазовых центров подрешеток относительно наблюдаемого объекта, где m число от 0 до М-1, а M - число когерентно накопленных импульсов, отраженных от участка земной поверхности облучаемого ДН каждой подрешетки,
затем, выбирая каждый раз M импульсов сигналов  и
и  со смещением на один импульс в каждом стробе дальности n, K раз компенсируют разность фаз δϕm M принятых импульсов во всех стробах дальности n сигнала
со смещением на один импульс в каждом стробе дальности n, K раз компенсируют разность фаз δϕm M принятых импульсов во всех стробах дальности n сигнала  , формируют M отсчетов комплексно-сопряженного сигнала
, формируют M отсчетов комплексно-сопряженного сигнала  в каждом стробе дальности n, с последующим перемножением M отсчетов скомпенсированного сигнала и M отсчетов комплексно-сопряженного сигнала
в каждом стробе дальности n, с последующим перемножением M отсчетов скомпенсированного сигнала и M отсчетов комплексно-сопряженного сигнала  в каждом стробе дальности n, и K раз суммируют результаты перемножения по M отсчетов, получая каждый раз комплексную амплитуду результирующего сигнала
в каждом стробе дальности n, и K раз суммируют результаты перемножения по M отсчетов, получая каждый раз комплексную амплитуду результирующего сигнала  в каждом стробе дальности n, где k=0…K-1, K=1-М,
в каждом стробе дальности n, где k=0…K-1, K=1-М,
затем формируют амплитуды радиолокационного изображения C[n,k] в координатах дальность-азимут по формуле:
 , где
, где  действительная часть комплексного сигнала
действительная часть комплексного сигнала  .
.
2. Способ по п. 1, отличающийся тем, что разность фаз δϕm определяют по формуле:

где λ - длина волны, В - расстояние между фазовыми центрами подрешеток, Тр - период повторения импульсного сигнала, wck - скорость сканирования лучом ДН каждой подрешетки, m - целое число от 0 до М-1.
3. Способ по п. 1, отличающийся тем, что количество импульсов M определяют по формуле:
где θ-3dB - ширина луча ДН подрешетки по уровню 3 дБ по азимуту, wck - скорость сканирования лучом ДН каждой подрешетки, Тр - период повторения излучаемого импульсного сигнала.
| Способ картографирования земной поверхности бортовой радиолокационной станцией | 2016 |
|
RU2626012C1 |
| СПОСОБ ФРОНТАЛЬНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ АНТЕННЫ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСКЛЮЧЕНИЕМ СЛЕПЫХ ЗОН В ПЕРЕДНЕЙ ЗОНЕ С ПОМОЩЬЮ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2560082C2 |
| Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом | 2016 |
|
RU2617116C1 |
| Способ картографирования с помощью кольцевой антенной решётки | 2019 |
|
RU2728512C1 |
| Способ картографирования с помощью синтеза апертуры | 2019 |
|
RU2710021C1 |
| RU 2066060 C1, 27.08.1996 | |||
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2016 |
|
RU2636058C1 |
| US 6710743 B2, 23.03.2004 | |||
| US 20100225531 A1, 09.09.2010. | |||
