ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу сбора газа, такого как газ метан, выпускаемого с морского дна (а также озерного дна, ниже в данном документе).
УРОВЕНЬ ТЕХНИКИ
[0002] В последнее время, делались попытки сбора газов, высвобождаемых из газовых гидратов различных видов, таких как гидрат метана, которые существуют под морским дном. Газогидратные осадочные отложения под морским дном сепарируются на воду и газ согласно некоторым условиям, таким как температура и давление, и затем сепарированный газ всплывает вверх к поверхности моря. Может иметь место случай, где газ смешивается с морской водой, когда всплывает вверх к поверхности моря. Поэтому газ, сепарированный от газового гидрата, требует сбора до своего смешивания с морской водой.
[0003] Патентный Документ 1, приведенный ниже, раскрывает способ сбора природных ресурсов морского дна. Согласно способу, раскрытому в Патентном Документе 1, сырье, выброшенное с морского дна, улавливается корпусом куполообразной конструкции, и затем собирается кораблем сбора сырья на поверхности моря через трубу, соединенную с корпусом конструкции.
Документ уровня техники
Патентный Документ
[0004] Патент Документ 1: публикация японской патентной заявки Japanese Patent Application Publication No. 2012-21357
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Вместе с тем, задачей способа, раскрытого в Патентном Документе 1 является сбор сырья, при этом требуется погружение корпуса куполообразной конструкции и его фиксация в стабильном положении. Поэтому, на морском дне располагают якоря для сегментирования площади в форме круга, что может влиять на ресурсы рыболовства на морском дне, такие как креветки и крабы.
[0006] Задачей настоящего изобретения является обеспечение способа сбора газа, выпускаемого с морского дна (дна озера), эффективного и отрицательно не влияющего на ресурсы рыболовства на морском дне (дне озера).
[0007] Аспект настоящего изобретения обеспечивает способ сбора газа, выходящего из исходного материала, который существует на морском дне или дне озера, способ содержит: выпуск собирающей мембраны в воду, причем крепежное устройство соединено с нижним концом собирающей мембраны, при этом собирающая мембрана выполнена в виде мембраны, которая расходится вниз от своей верхней части; посредством устройства позиционирования, предусмотренного в крепежном устройстве, распознавание пространственного положения крепежного устройства в воде и затем удержание пространственного положения крепежного устройства в заданном положении посредством его автономной навигации; на основе распределения по вертикали температуры воды, полученного CTD, установку нижнего конца собирающей мембраны в положении, которое расположено выше морского дна или дна озера и расположено на меньшей глубине, чем глубина воды, где исходный материал сепарируется при переходе из твердого состояния на воду и газ, и установку верха собирающей мембраны в положении на большей глубине, чем глубина воды, где пузырьки газа исчезают вследствие смешивания газа с морской или озерной водой; и сбор газа, выпускаемого с морского или озерного дна, посредством собирающей мембраны.
[0008] Согласно описанному выше аспекту, нижний конец собирающей мембраны устанавливают на морском дне в положении выше морского дна (дна озера) и на меньшей глубине, чем глубина воды, где исходный материал сепарируется при переходе из твердого состояния на воду и газ, при этом становится возможным эффективный сбор газа. Дополнительно, становится возможным предотвращение влияния на ресурсы рыболовства на морском дне (дне озера).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
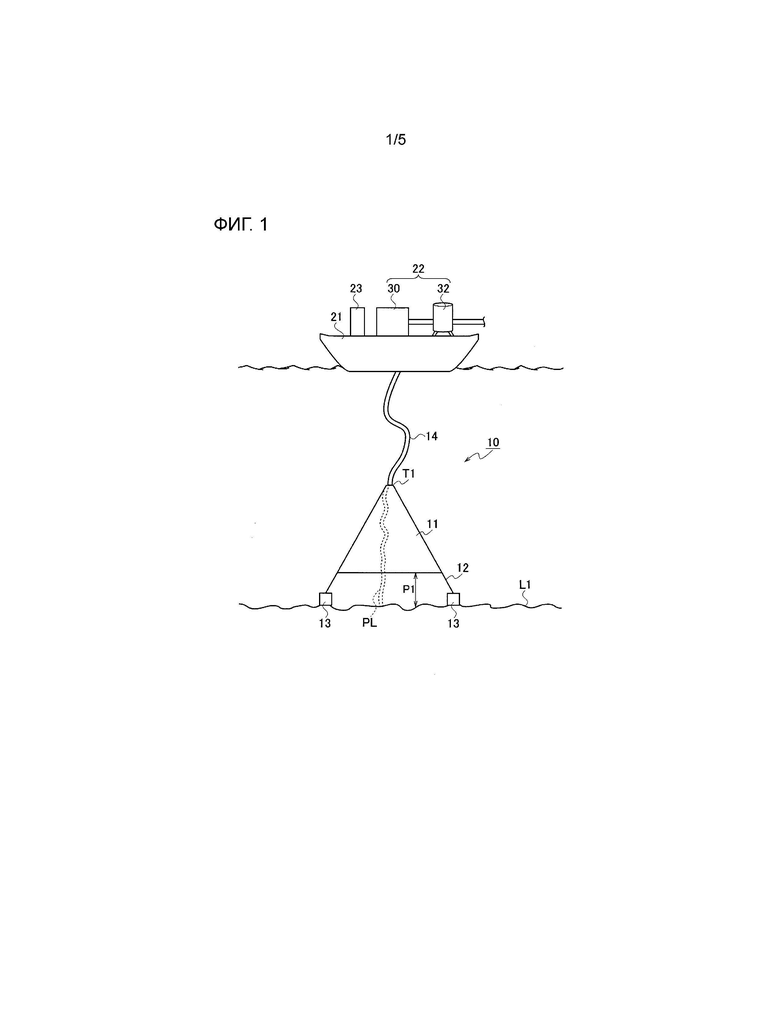
[0009] На фиг. 1 показана схема фундаментальной конфигурации газосборного устройства, посредством которого реализуют способ сбора газа.
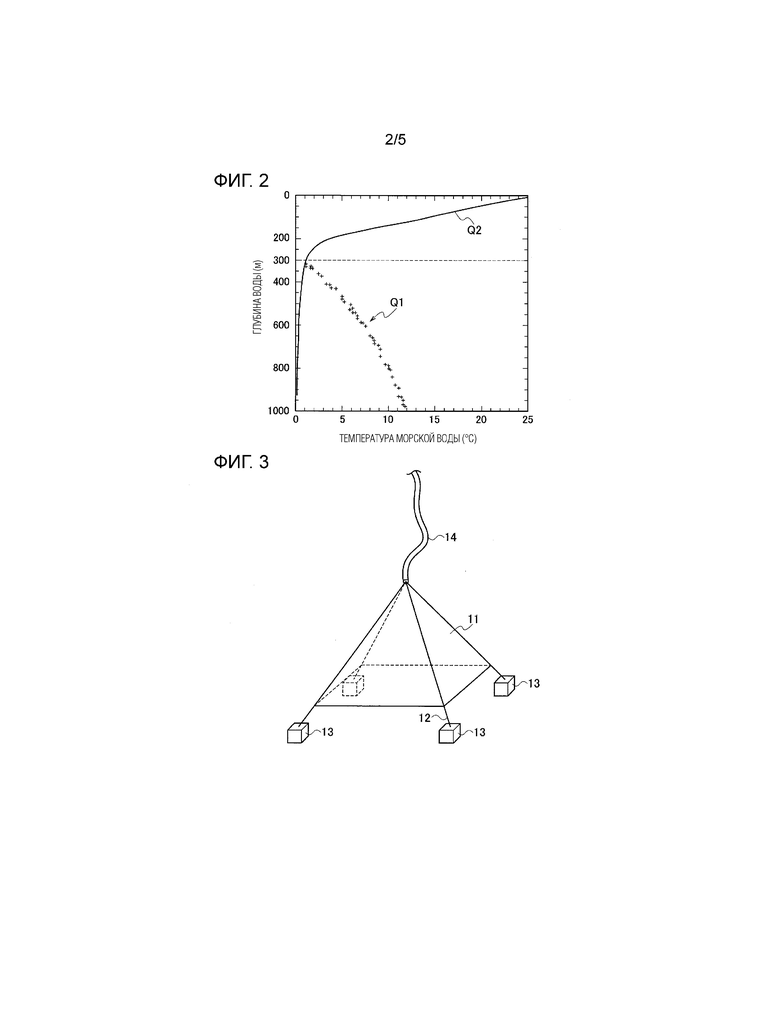
На фиг. 2 показан график зависимости между температурой морской воды и глубиной воды, при которых гидрат метана сепарируется на воду и метан.
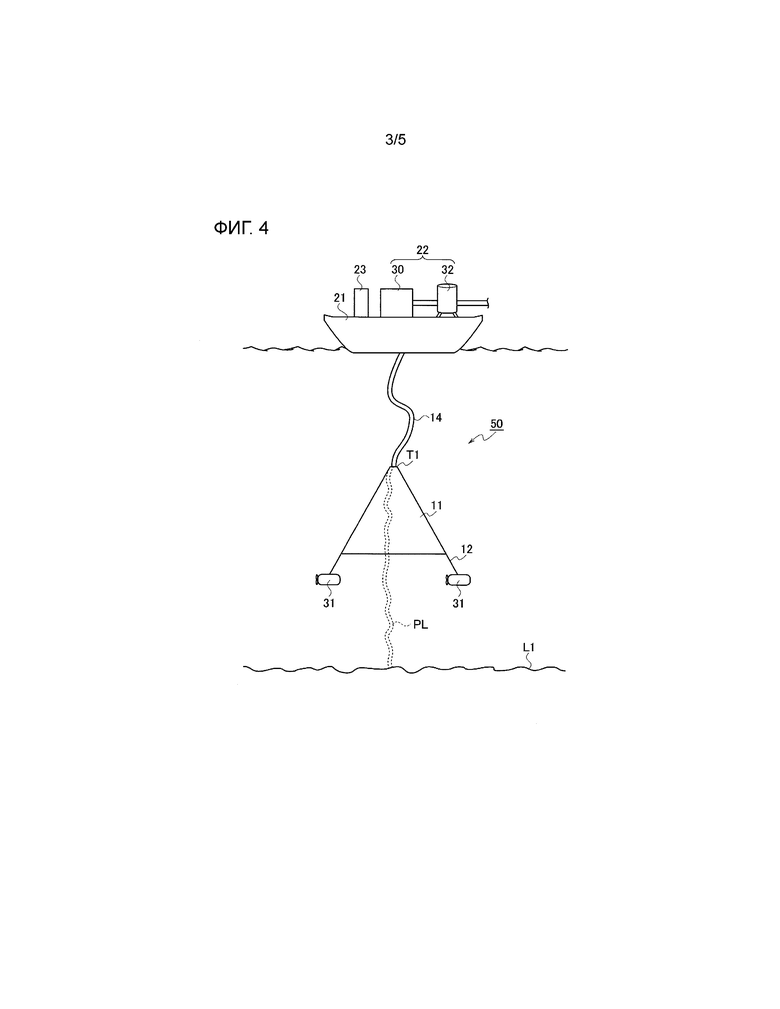
На фиг. 3 показано в изометрии газосборное устройство.
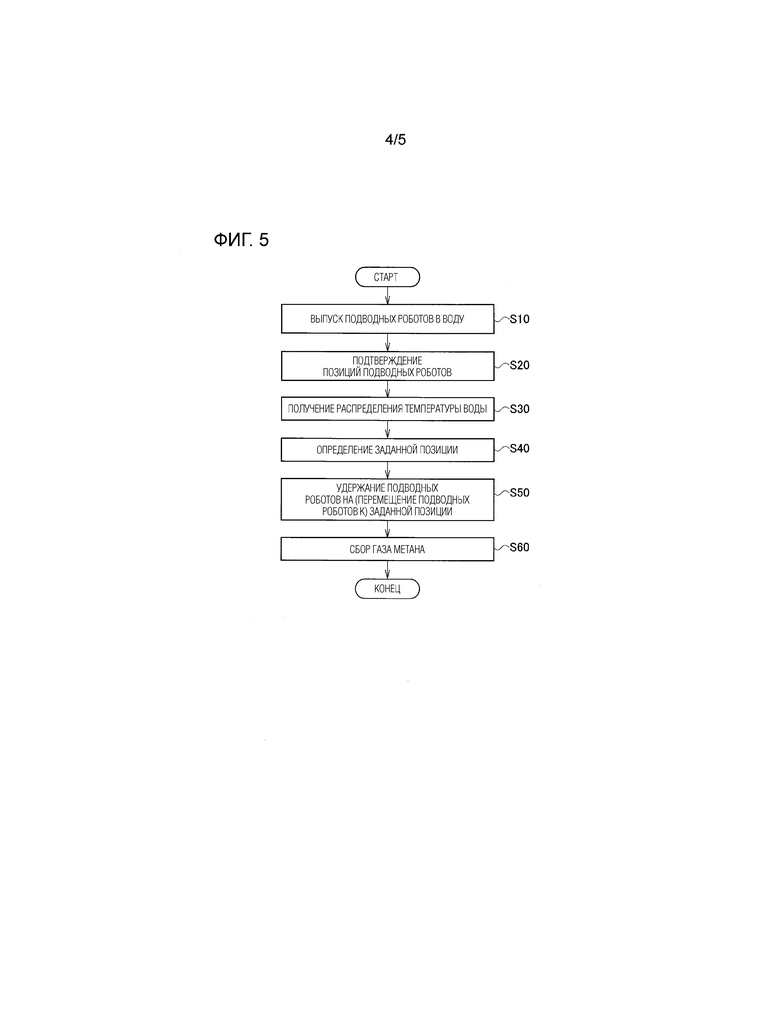
На фиг. 4 показана схема конфигурации газосборного устройства, посредством которого исполняют способ сбора газа согласно варианту осуществления.
На фиг. 5 показана блок-схема последовательности этапов способа сбора с применением газосборного устройства.
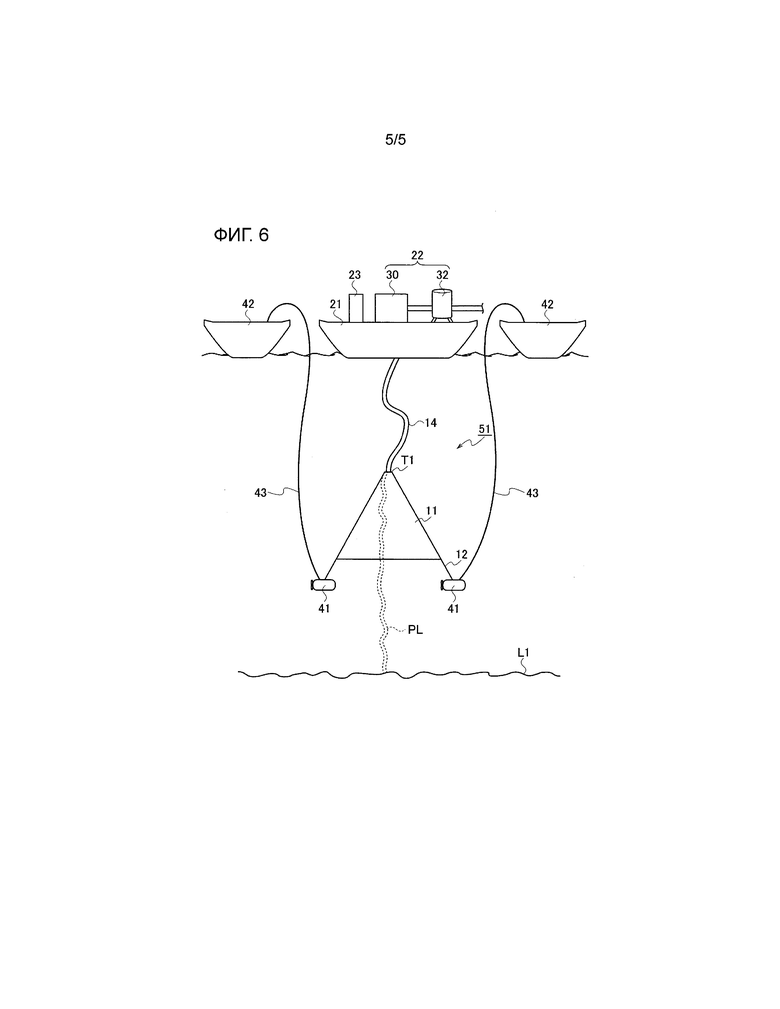
На фиг. 6 показана схема, объясняющая пример конфигурации модифицированного газосборного устройства.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0010] Вариант осуществления описан ниже со ссылкой на чертежи.
[0011] [Фундаментальная Конфигурация] Первой, перед объяснением варианта осуществления объяснена фундаментальная конфигурация газосборного устройства, посредством которого исполняют способ сбора газа. Как показано на фиг. 1, газосборное устройство 10 включает в себя собирающую мембрану 11, которую погружают в морскую воду с надводного корабля 21 к морскому дну (дну озера) L1 и которая затем расходится вниз. То есть, собирающая мембрана 11 выполнена в виде мембраны, которая расходится вниз от своей верхней части T1. Расстояние от нижнего конца собирающей мембраны 11 до верхней части T1 составляет 100м, например. Собирающую мембрану 11 поддерживают четыре каната 12. Грузы 13 для установки на морское дно L1 соединены с нижними концами канатов 12, соответственно. То есть, грузы 13 прикреплены к нижнему концу собирающей мембраны 11 и, при этом, функционируют, как фиксаторы для удержания (стабилизации) собирающей мембраны 11 на требуемой глубине в воде.
[0012] Когда грузы 13 опускают на морское дно L1 так, что грузы 13, прикрепленные к нижнему концу канатов 12 располагаются по углам прямоугольной площади, собирающую мембрану 11, поддерживаемую канатами 12, развертывают в конфигурации прямоугольной пирамиды с расположением верхней части T1, как самой верхней точки. Когда собирающую мембрану 11 с формой прямоугольной пирамиды затапливают на площади, где газ и зерна газового гидрата (исходный материал) (например, метанового газа и зерна гидрата метана) выпускаются с морского дна L1, и существует газовый султан (султаны) PL, газ и газовые гидраты, выпускаемые с морского дна на поверхность, можно собирать посредством собирающей мембраны 11. Отмечаем, что ниже в данном документе, даны объяснения с примером, где газовый гидрат является гидратом метана, и газ, подлежащий сбору, является газом метаном.
[0013] Один конец трубы 14 (например, двойной спиральной трубы) соединен с верхней частью Т1 (или ее окрестностями) собирающей мембраны 11. Другой конец трубы 14 соединен с блоком 22 на борту корабля 21. То есть, газ метан, собранный посредством собирающей мембраны 11, подается в блок 22 на борту корабля через трубу 14.
[0014] Блок 22 на борту корабля включает в себя оборудование, такое как газожидкостный сепаратор 30, соединенный с трубой 14, и работающая под давлением накопительная емкость 32 для накопления собранного метана. Блок 22 на борту корабля извлекает газ метан из газа, собранного через трубу 14, и газожидкостных смесей, собранных вместе с газом, и затем передает их на оборудование ниже по потоку. Например, извлеченный газ метан передается емкость для накопления газов через трубопровод.
[0015] Собирающая мембрана 11 выполнена из материала с высокой долговечностью, не подверженного расширению или сокращению и не разлагающегося, даже при нахождении в морской воде длительное время.
[0016] Нижний конец собирающей мембраны 11 расположен на некотором расстоянии от морского дна L1 (см. расстояние P1, фиг. 1). То есть, грузы 13 опущены на морское дно L1, но нижний конец собирающей мембраны 11 расположен в положении выше (на глубине меньше) морского дна L1. В дополнение, верхняя часть Т1 собирающей мембраны 11 расположена на глубине большей глубины воды, где газ метан смешивается с морской водой, и где его пузырьки исчезают. Согласно данной конфигурации, газ метан можно собирать в состоянии, где гидрат метана (исходный материал) сепарируется на воду и газ метан. Дополнительно, даже в варианте, где газ метан должен смешиваться с морской водой, газ метан можно собирать до его полного смешивания с морской водой.
[0017] Здесь глубина воды, где гидрат метана (исходный материал) сепарируется на воду и газ, и глубина воды, где пузырьки газа метана исчезают, варьируются в зависимости от температуры морской воды. Ниже в данном документе, зависимость глубины воды, где гидрат метана сепарируется на воду и газ, от температуры морской воды описана со ссылкой на фиг. 2.
[0018] На горизонтальной оси графика фиг. 2 указана температура морской воды (°C), и на вертикальной оси указана глубина от морской поверхности. Отметки +, ссылочная позиция Q1, показывают температуры морской воды и глубины воды, полученные вычислениями, при которых гидрат метана (твердое вещество) сепарируется на воду и газ. Поэтому, ([некоторая] приблизительная) кривая линия (Q1), полученная из отметок+указанных ссылочной позицией Q1, является кривой зоны стабильности гидрата метана. Слева от кривой линии Q1 гидрат метана существует, как твердое вещество. Справа от кривой линии Q1 гидрат метана сепарируется на воду и газ метан. Поэтому, как понятно из кривой линии Q1, чем ниже становится температура морской воды, тем меньше становится глубина воды для существования гидрата метана (как твердого вещества). Например, при глубине воды 500м гидрат метана сепарируется на воду и газ, когда температура воды выше 5°C. При глубине воды 300м, гидрат метана сепарируется на воду и газ, когда температура воды выше 2°C.
[0019] Следует отметить, что кривая линия Q2 фиг. 2, показывает обычное изменение температуры воды в морском районе Японского моря. Как понятно из кривой линии Q2, температура воды быстро увеличивается при глубине воды меньше 300м. То есть, на основе соответствия между кривой линией Q2 заданного морского района (здесь морской район Японского моря) и кривой Q1 зоны стабильности гидрата метана, можно получить глубину воды где газ метан исчезает. В примере, показанном на фиг. 2, можно понять, что газ метан получают из гидрата метана при глубине воды около 300м. Поэтому, когда собирающая мембрана 11 установлена так, что нижний конец собирающей мембраны 11 расположен на глубине воды меньше 300м, можно собирать газ метан из гидрата метана.
[0020] Когда глубина воды нижнего конца собирающей мембраны 11 меньше, газ метан смешивается с морской водой, и поэтому газ метан невозможно эффективно собирать. Поэтому, предпочтительно располагать нижний конец собирающей мембраны 11 на глубине воды близкой к точке пересечения кривой линии Q1 и кривой линии Q2.
[0021] Ниже описаны способы сбора газа метана из султана PL метана, выпускаемого с морского дна L1, с применением вышеописанного газосборного устройства 10. Вначале корабль 21 перемещается на поверхность моря выше султана PL метана, с подтверждением наличия султана PL метана, на котором газ метан выпускается с морского дна L1 и с намерением собирать газ метан, содержащийся в султане PL метана. Затем грузы 13 опускают на морское дно, и затем грузы 13 перемещают в требуемые положения, соответственно, применяя робот (роботы), работающие под водой. Конкретно, грузы 13 перемещают посредством дистанционного управления, применяя робот (роботы) так, что султан PL метана располагается приблизительно по центру развернутой собирающей мембраны 11. Следует отметить, что известны различные типы роботов, работающие под водой, поэтому детальное описание конфигурации и работы робота (роботов) не приводится.
[0022] Грузы 13 соединены с канатами 12, соответственно, и собирающая мембрана 11 прикреплена к канатам 12. Поэтому, собирающая мембрана 11 развертывается вниз в конфигурации прямоугольной пирамиды от ее верхней части Т1, как базовой точки (см. фиг. 3). Здесь собирающую мембрану 11 развертывают в конфигурации прямоугольной пирамиды, применяя четыре груза 13. Вместе с тем, собирающую мембрану 11 можно развертывать в конфигурации полигональной пирамиды, применяя три, пять или больше грузов 13. В дополнение, предпочтительной является развертываемая собирающая мембрана 11 в форме трехгранной пирамиды, полигональной пирамиды или круглого конуса, но без ограничения указанным. Достаточным является развертывание собирающей мембраны 11 в форме, в которой мембрана расходится вниз, и ее верхняя часть Т1 является самой верхней точкой.
[0023] Нижний конец собирающей мембраны 11 установлен в некотором положении выше морского дна L1. Поскольку образован промежуток между морским дном L1 и нижним концом собирающей мембраны 11, как показано расстоянием P1 (см. фиг. 1), возможно минимизация влияния на рыбные ресурсы, вылавливаемые вблизи морского дна.
[0024] В дополнение, верхнюю часть Т1 собирающей мембраны 11 установлена на большей глубине, чем глубина воды, где газ метан нельзя обнаружить акустическим гидролокатором вследствие его смешивания с водой. Газ метан, сепарированный от гидрата метана, смешивается с морской водой, когда всплывает вверх на расстояние около 100-200м, и при этом его нельзя обнаружить акустическим гидролокатором.
[0025] Вместе с тем, в данной конфигурации, верхняя часть Т1 собирающей мембраны 11 установлена ниже той глубины воды, где газ метан нельзя обнаружить акустическим гидролокатором вследствие его смешивания с водой. Поэтому, возможным является сбор газа метана собирающей мембраной 11 до его смешивания с морской водой. Собранный газ метан вводится в трубу 14, соединенную с верхней частью Т1 собирающей мембраны 11, и затем подается в блок 22 на борту корабля 21. Подаваемый газ метан сепарируется газожидкостным сепаратором 30 и затем накапливается в работающей под давлением емкости 32.
[0026] Поскольку газ метан собирают посредством собирающей мембраны 11, которая расходится вниз в описанной выше конфигурации, в газосборном устройстве 10, имеющем описанную выше фундаментальную конфигурацию, возможен эффективный сбор газа метана, выпускаемого из султана PL метана.
[0027] В дополнение, поскольку нижний конец собирающей мембраны 11 установлен в положении выше (на меньшей глубине) морского дна L1, возможным является предотвращение его влияния на рыбные ресурсы. Дополнительно, поскольку нижний конец собирающей мембраны 11 установлен в положении с глубиной меньше глубины воды, где гидрат метана сепарируется на воду и газ метан, возможен эффективный сбор газа метана.
[0028] Кроме того, поскольку газ метан, выпускаемый из султана PL метана, собирают посредством газосборного устройства 10, имеющего описанную выше фундаментальную конфигурацию, отличающуюся от обычного способа сбора с применением буровой установки, возможно простое перемещение устройства. Поскольку устройство возможно простое перемещение, возможен простой сбор газа метана, выпускаемого из рассеянных гидратов метана аллювиального типа.
[0029] [Вариант осуществления] Ниже описан способ сбора газа (газосборное устройство 50) согласно варианту осуществления. В описанной выше фундаментальной конфигурации, грузы 13 опускают на морское дно L1, и собирающую мембрану 11 развертывают посредством канатов 12, соединенных с грузами 13. В настоящем варианте осуществления концы канатов 12 соединены с не имеющими кабеля (не имеющими фала) подводными роботами 31, которые функционируют, как грузы, соответственно. Собирающую мембрану 11 развертывают посредством канатов 12, посредством установки подводных роботов 31 на требуемой глубине под водой. То есть, подводные роботы 31 функционируют, как крепежные устройства, удерживающие собирающую мембрану 11 на требуемой глубине под водой. Кроме того, подводные роботы 31 также функционируют, как позиционирующее устройство, удерживающее крепежные устройства в нужном положении.
[0030] Как показано на фиг. 4, газосборное устройство 50 в настоящем варианте осуществления включает в себя собирающую мембрану 11, которую опускают с корабля 21 в море к морскому дну L1, и которая расходится вниз. То есть, собирающей мембране 11 придают конфигурацию мембраны, которая расходится вниз от верхней части Т1. Собирающую мембрану 11 поддерживают четыре каната 12, и каждый нижний конец канатов 12 соединен с подводным роботом 31 для удержания ее в требуемом положении под водой.
[0031] Один конец трубы 14 соединен с верхней частью Т1 собирающей мембраны 11, и другой конец трубы 14 соединен с блоком 22 на борту корабля 21. То есть, газ метан, собранный посредством собирающей мембраны 11 подается в блок 22 на борту корабля через трубу 14.
[0032] Подводный робот (роботы) 31 имеет функцию распознавания своего собственного положения, и может перемещаться автономно во всех направлениях. То есть, если установлены координаты заданного положения, подводные роботы 31 перемещаются автономно к заданному положению и затем удерживают сами себя в заданном положении. Поэтому, когда боковая сила воздействует на собирающую мембрану 11, например, от приливного течения, подводные роботы 31 перемещаются автономно против приливного течения и при этом удерживают сами себя в заданном положении. В результате, становится возможным удерживать собирающую мембрану 11 в требуемом положении без опускания грузов 13 на морское дно L1, как в варианте вышеописанной фундаментальной конфигурации.
[0033] Ниже описаны способы сбора газа метана из султана PL метана, выпускаемого с морского дна L1, с применением вышеописанного газосборного устройства 50 (см. фиг. 5). Корабль 21 перемещается в некоторую точку на поверхности моря над султаном PL метана при подтверждении наличия султана PL метана и с намерением сбора газа метана, содержащегося в султане PL метана. Затем подводные роботы 31 выпускают в море (этап S10) и распознаются положения подводных роботов 31 (этап S20), и после этого подводные роботы 31 перемещаются в заданное положение (этап S50). Конкретно, подводные роботы 31 перемещаются так, что султан PL метана располагается приблизительно по центру развертываемой собирающей мембраны 11. Положения подводных роботов 31 можно распознавать посредством беспроводной связи или гидролокатора.
[0034] В дополнение, канаты 12 соединены с подводными роботами 31, соответственно, и собирающая мембрана 11 прикреплена к канатам 12. Поэтому, собирающую мембрану 11 развертывается вниз в конфигурации прямоугольной пирамиды от ее верхней части Т1, как базовой точки (см. фиг. 4). В дополнение, когда заданное положение подводных роботов 31 определено (этап S40), координаты заданного положения вводят в подводные роботы 31. Получение данных распределения температуры воды (этап S30) и определение заданного положения на основе распределения температуры воды (этап S40) описаны подробно ниже. В дополнение, заданное положение может быть предварительно установлено до выпуска подводных роботов 31 в море, или может быть установлено посредством беспроводной связи. Поскольку подводные роботы 31 работают автономно для удержания в заданном положении, возможным становится стабильный сбор газа метана из султана PL метана посредством собирающей мембраны 11 (этап S60).
[0035] Аналогично описанной выше фундаментальной конфигурации, газ метан султана метана, выпускаемого с морского дна L1 улавливают посредством собирающей мембраны 11, и затем собирают через трубу 14. Преимущества вышеописанной фундаментальной конфигурации можно также использовать в настоящем варианте осуществления. Дополнительные преимущества можно получить применяя подводные роботы 31, обладающие способностью автономной навигации, вместо грузов 13.
[0036] Согласно газосборному устройству 50 настоящего варианта осуществления, подводные роботы 31 соединены с концами канатов 12, соответственно, и собирающая мембрана 11 удерживается в требуемом заданном положении, посредством автономной навигации подводных роботов 31. Поэтому, не требуется опускать грузы 13 на морское дно L1, как в случае фундаментальной конфигурации, но становится возможной установка собирающей мембраны 11 на требуемой глубине под водой, даже если глубина морского дна L1 большая. В результате, становится возможным сбор газа метана, на который не влияет рельеф морского дна L1.
[0037] В дополнение, поскольку нижний конец собирающей мембраны 11 в положении выше (меньшей глубины), глубины воды, где твердый гидрат метана сепарируется на воду и газ метан, становится возможным эффективный сбор газа метана.
[0038] В дополнение, верхняя часть Т1 собирающей мембраны 11 размещена в положении глубже, чем глубина воды, где газ метан не может быть обнаружен акустическим гидролокатором вследствие его смешивания с водой. Газ метан, сепарированный от гидрата метана, смешивается с морской водой, когда всплывает вверх почти на 100-200м, и поэтому не может быть обнаружен акустическим гидролокатором.
[0039] Вместе с тем, в настоящем варианте осуществления верхняя часть Т1 собирающей мембраны 11 установлена в положении большей глубины, чем глубина воды, где газ метан не может быть обнаружен акустическим гидролокатором вследствие его смешивания с водой. Поэтому, становится возможным сбор газа метана собирающей мембраной 11 до его смешивания с морской водой. Собранный газ метан вводится в трубу 14, соединенную с верхней частью Т1 собирающей мембраны 11, и затем подается в блок 22 на борту корабля 21. Подаваемый газ метан сепарируют газожидкостным сепаратором 30, и затем накапливают в работающей под давлением емкости 32.
[0040] Следует отметить, что подводные роботы 31 соединены с концами канатов 12, соответственно, в настоящем варианте осуществления. Вместе с тем, грузы можно также соединять вместе с подводными роботами 31 для получения требуемой массы.
[0041] [Модифицированный Пример] Следующим, описан модифицированный пример описанного выше варианта. В описанном выше варианте осуществления, собирающую мембрану 11 удерживают в требуемом заданном положении посредством автономной навигации подводных роботов 31 бескабельного типа. В ином варианте собирающую мембрану 11 удерживают в требуемом заданном положении посредством подводных роботов 41 кабельного типа (с фалом) в настоящем модифицированном примере. Ниже в данном документе, модифицированный пример описан со ссылкой на фиг. 6.
[0042] Как показано на фиг. 6, аналогично описанному выше варианту осуществления, газосборное устройство 51 в настоящем модифицированном примере включает в себя собирающую мембрану 11, которую опускают с корабля 21 в море к морскому дну (дну озера) L1 и которая расходится вниз. То есть, собирающей мембране 11 придают конфигурацию мембраны, которая расходится вниз от верхней части Т1. Собирающую мембрану 11 поддерживают четыре каната 12. Каждый нижний конец канатов 12 соединен с подводным роботом 41 кабельного типа для удержания собирающей мембраны 11 в требуемом подводном положении.
[0043] Многочисленные корабли 42 поддержки для сохранения каждого подводного положения подводных роботов 41 размещены на морской поверхности. Корабли 42 поддержки соединены с подводными роботами 41 поддерживающими канатами 43, соответственно. Следует отметить, что только два комплекта из подводного робота 41 и корабля 42 поддержки показаны на фиг. 6, но собирающую мембрану 11 развертывают четырьмя комплектами из подводного робота 41 и корабля 42 поддержки.
[0044] Корабль (корабли) 42 поддержки имеет функцию для распознавания своего собственного положения, и может распознавать положение (широту/долготу) подводного робота 41 на основе относительного взаимного расположения с подводным роботом 41. Поэтому, даже если подводный робот (роботы) 41 не имеет функции автономный навигации и функции распознавания своего собственного положения, становится возможным удержание подводных роботов 41 в требуемом заданном положении при выполнении позиционирования кораблей 42 поддержки. Следует отметить, что заданное положение может быть предварительно установлено до выпуска подводных роботов 41 в море, или может быть установлено посредством беспроводной связи или проводной связи через поддерживающие канаты 43. Положения подводных роботов 31 можно также распознавать посредством беспроводной /проводной связи или гидролокатора.
[0045] Согласно газосборному устройству 51 настоящего модифицированного примера, подводные роботы 41 кабельного типа соединены с концами канатов 12, соответственно, и корабль 42 поддержки соединен с подводными роботами 41, соответственно. Собирающую мембрану 11 удерживают в требуемом заданном положении, перемещая подводные роботы 41 посредством навигации корабля 42 поддержки. Поэтому, не требуется опускать грузы 13 на морское дно L1, как в фундаментальной конфигурации, но становится возможным установить собирающую мембрану 11 на требуемой глубине под водой, даже при большой глубине воды морского дна L1. В результате, становится возможным сбор газа метана, исключая влияние рельефа морского дна L1. В дополнение, поскольку подводные роботы 41 соединены с кораблем 42 поддержки посредством поддерживающих канатов 43, соответственно, не требуется придавать функцию автономной навигации подводным роботам 41. Поэтому, становится возможным упрощение конфигурации подводного робота (роботов) 41 и уменьшение габаритов устройства.
[0046] По отношению к вышеупомянутому определению заданного положения (этап S40), распределение по вертикали температуры воды для морского района предварительно получают, применяя измерительный инструмент 23 такой как CTD (Прибор для определения глубины, температуры и электропроводимости воды) (этап S30), и затем глубину воды заданного положения собирающей мембраны 11 определяют на основе глубины воды точки пересечения графика данного распределения температуры воды (см. кривую линию Q2 на фиг. 2) и кривой зоны стабильности гидрата метана (см. кривую линию Q1 на фиг. 2). В дополнение, горизонтальные координаты заданного положения собирающей мембраны 11 определяют, с учетом положения (пути до) султана PL метана. Положение собирающей мембраны 11, в котором нижний конец собирающей мембраны 11 установлен в положении меньшей глубины, чем глубина воды, где гидрат метана сепарируется на воду и газ, и верхняя часть Т1 собирающей мембраны 11 установлена в положении на большей глубине, чем глубина воды, где пузырьки газа метана исчезают вследствие смешивания с морской водой, устанавливают, как заданное положение (этап S40).
[0047] Способ сбора газа согласно настоящему изобретению не ограничен вышеописанным вариантом осуществления (и его модифицированным примером). Конфигурацию каждого элемента можно заменить любой конфигурацией, имеющей эквивалентную функцию.
[0048] Например, в вышеописанном варианте осуществления, собирают газ метан, выпускаемый из гидрата метана, который существует под морским дном (в том числе, дном озера, как указано выше). Вместе с тем, представленное можно применять в случае сбора газа, выпускаемого из газового гидрата, иного, чем гидрат метана, такого как гидрат этана или гидрат бутана.
[0049] В дополнение, достаточным является выполнение сбора и обработки данных распределения температуры воды (этап S30) до определения заданного положения (этап S40). Дополнительно, определение заданного положения (этап S40) можно выполнять до выпуска подводных роботов 31 (41) в море или после их выпуска. Вместе с тем, определение заданного положения (этап S40) должно быть выполнено до удержания подводных роботов 31 (41) в заданном положении (перемещения их к заданному положению) (этап S50).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ РАЗВЕДКИ РЕСУРСОВ МОРСКОГО ДНА | 2005 |
|
RU2340917C1 |
| СПОСОБ ДОБЫЧИ ГАЗА ИЗ ПРИДОННЫХ СКОПЛЕНИЙ ГАЗОВЫХ ГИДРАТОВ | 2009 |
|
RU2403379C1 |
| Способ и устройства повышения глубоководности, проходимости, работоспособности, универсальности транспортных средств, эффективности работ на грунте | 2021 |
|
RU2789617C2 |
| СИСТЕМА УСКОРЕНИЯ ДИССОЦИАЦИИ ГИДРАТА МЕТАНА И ИЗВЛЕЧЕНИЯ ГАЗООБРАЗНОГО МЕТАНА | 2008 |
|
RU2463447C2 |
| СПОСОБ РАЗВЕДКИ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ УГЛЕВОДОРОДОВ | 2012 |
|
RU2593438C2 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ МОРСКИХ РАЙОНОВ ОТ ПЛАВАЮЩИХ ПОДВОДНЫХ ОБЪЕКТОВ | 2020 |
|
RU2753658C1 |
| ОПРЕСНИТЕЛЬНАЯ УСТАНОВКА | 2008 |
|
RU2380320C1 |
| СПОСОБ ГЕЛИЕВОЙ СЪЕМКИ НА АКВАТОРИЯХ | 2011 |
|
RU2484503C1 |
| СПОСОБ РАЗВЕДКИ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ УГЛЕВОДОРОДОВ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО АППАРАТА | 2012 |
|
RU2608344C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ЗАЛЕЖЕЙ ГАЗОВЫХ ГИДРАТОВ | 2012 |
|
RU2490676C1 |
Изобретение относится к способу сбора газа, такого как метан, бутан или этан, выходящего из исходного материала, который существует на морском дне или дне озера. Выпускают собирающую мембрану в воду, причем крепежное устройство соединено с нижним концом собирающей мембраны. Собирающую мембрану выполняют расходящейся вниз от своей верхней части. Посредством позиционирующего устройства, предусмотренного в крепежном устройстве, распознают его пространственное положение в воде и затем удерживают это пространственное положение посредством его автономной навигации. Устанавливают нижний конец собирающей мембраны в положении, у которого глубина воды меньше, чем у морского дна или дна озера, и меньше, чем первая глубина воды над морским дном или дном озера, где вода и газ выходят из гидрата газа исходного материала в твердом состоянии, на основе распределения по вертикали температуры воды, полученного посредством CTD (прибора для определения глубины, температуры и электропроводимости воды). Устанавливают верхнюю часть собирающей мембраны в положении на глубине, большей, чем вторая глубина воды, где пузырьки газа, выходящего из гидрата газа, исчезают вследствие смешивания газа с морской или озерной водой, причем вторую глубину воды определяют акустическим гидролокатором. Достигаемый технический результат - упрощение сбора газа с исключением влияния на способ добычи рельефа морского дна, а также предотвращение влияния добываемого газа на ресурсы рыболовства на морском дне (дне озера). 1 з.п. ф-лы, 6 ил.
.
1. Способ сбора газа, выходящего из исходного материала, который существует у морского дна (L1) или дна озера, способ включает в себя этапы, на которых:
выпускают в воду, собирающую мембрану (11), причем крепежное устройство (31) соединено с нижним концом собирающей мембраны, при этом собирающая мембрана (11) выполнена в виде мембраны, которая расходится вниз от своей верхней части (T1);
посредством устройства позиционирования (31), предусмотренного в крепежном устройстве, распознают пространственное положение крепежного устройства (31) в воде и затем удерживают пространственное положение крепежного устройства (31) в заданном положении посредством его автономной навигации; и
собирают газ, выпускаемый из морского дна (L1) или дна озера,
при этом заданное положение крепежного устройства (31) устанавливает
1) нижний конец собирающей мембраны (11) в положении, у которого глубина воды меньше, чем у морского дна (L1) или дна озера, и меньше, чем первая глубина воды над морским дном (L1) или дном озера, где вода и газ выходят из гидрата газа исходного материала в твердом состоянии, на основе распределения (Q2) по вертикали температуры воды, полученного посредством CTD (23) (прибора для определения глубины, температуры и электропроводности воды) ; и
2) устанавливают верхнюю часть (T1) собирающей мембраны (11) в положении на глубине, большей, чем вторая глубина воды, где пузырьки газа, выходящего из гидрата газа, исчезают вследствие смешивания газа с морской или озерной водой, причем вторую глубину воды определяют акустическим гидролокатором.
2. Способ сбора газа по п. 1, в котором исходный материал является гидратами метана, причем способ дополнительно включает в себя этапы, на которых:
получают кривую (Q1) зоны стабильности гидрата метана, которая обозначает соотношение глубины воды и температуры воды, при которых гидраты метана сепарируются на воду и газ; и
устанавливают глубину вблизи точки пересечения кривой распределения (Q2) температуры воды и кривой (Q1) зоны стабильности гидрата метана на первой глубине.
| US 7546880 B2, 16.06.2009 | |||
| WO 2012007389 A2, 19.01.2012 | |||
| Пловучий комбайн для сортировки и сплотки бревен в пучки | 1949 |
|
SU87263A1 |
| СПОСОБ ДОБЫЧИ ГАЗА В ОТКРЫТОМ МОРЕ | 1994 |
|
RU2078199C1 |
| WO 2006070577 A1, 06.07.2006. | |||

