ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к измерению угла между радиальной осью и линией центров тяжести сечений лопаток.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Термин «линия центров тяжести сечений» должен быть известен специалистам в данной области техники. Во всяком случае, для полноты картины определение этого термина можно изложить следующим образом. Рабочую лопатку роторной машины, в частности турбомашины, можно рассматривать как сочетание множества сечений пера, размещаемых одно на другое в радиальном направлении, перпендикулярном оси вращения. Линия, соединяющая центры тяжести всех сечений пера лопатки, образует линию (или ось) центров тяжести сечений.
К другим элементам лопатки относятся передняя кромка, являющаяся передней частью аэродинамического профиля, и задняя кромка, являющаяся задней частью аэродинамического профиля. Лопатка проходит радиально наружу от корневой части на первом конце, расположенном вблизи ступицы (часто смежно со ступицей), к бандажной полке на втором конце, удаленном от ступицы. Радиальная ось является осью, проходящей в наружном направлении от центра ступицы. Линия центров тяжести сечений так называемой цилиндрической лопатки в типичном случае должна совпадать с радиальной осью. Однако технологический допуск в станках, используемых для изготовления лопаток, и установка лопатки с усилием во время процесса сборки могут послужить причиной размещения линии центров тяжести сечений лопатки с отклонением от радиального направления.
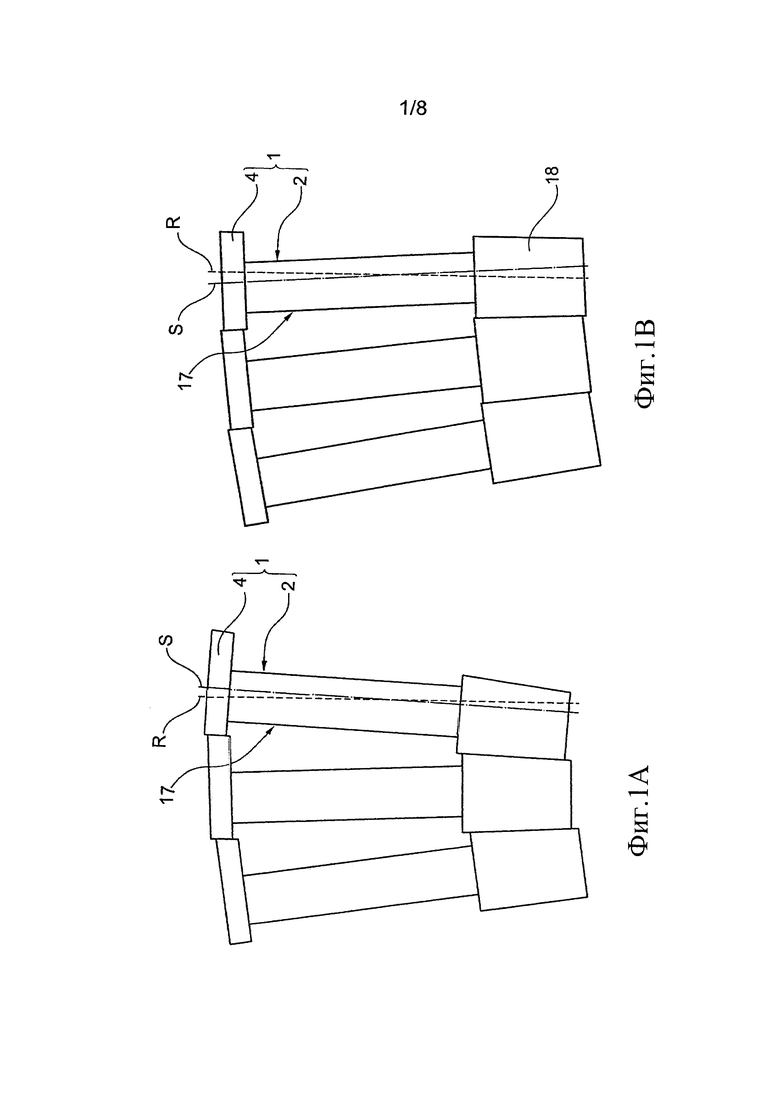
Фиг. 1А и 1В показывают два различных типа размещения линии центров тяжести сечений лопатки с отклонением от радиального направления. На фиг. 1А показано, что вследствие технологических допусков при изготовлении бандажной полки 4 лопатки 1 имеется избыточное количество материала собственно бандажной полки. Эта ситуация может возникать, например, если угол, под которым выполнена бандажная полка, несколько превышает проектный угол. Радиальная ось обозначена ссылочной позицией R, а линия центров тяжести сечений обозначена ссылочной позицией S. Показано, что данные две оси не совпадают, в то время как они должны совпадать. Соответственно, в случае, показанном на фиг. 1А, необходимо исправить этот недостаток, например, обработав бандажную полку на станке для придания ей правильного угла.
Фиг. 1В показывает лопатку, в которой линия центров тяжести сечений не совпадает с радиальным направлением из-за неправильного изготовления корневой части 18 (обусловленного наличием технологических допусков). Это обстоятельство вызывает неправильное расположение линии S центров тяжести сечений относительно радиальной оси R. Следует отметить, что в случае, показанном на фиг. 1В, неправильное расположение данных двух осей является противоположным случаю, показанному на фиг. 1А.
Следовательно, напряжения от действия центробежных сил, обусловленные неправильным расположением этих осей лопатки, могут быть существенными и, соответственно, могут вызывать значительный износ. Конструкция лопатки должна способствовать увеличению срока службы лопатки. В машинах, у которых лопатки имеют радиальную прямую линию центров тяжести сечений, если нарушена радиальная параллельность, могут увеличиться расчетные напряжения в лопатке, и может уменьшиться коэффициент запаса прочности.
Таким образом, для выполнения необходимых корректировок важно измерять угол отклонения линии центров тяжести сечений лопаток. Как известно, для осуществления этого типа измерений используют только одну простую линейку для измерения радиального положения. Во всяком случае, такую линейку можно использовать только с лопатками, у которых одна выпуклая сторона параллельна радиальному направлению, поскольку можно определить и изобразить на лопатке отсчетный вектор радиального положения. Кроме того, такая линейка не дает количественной оценки отклонения линии центров тяжести сечений лопаток от радиального направления, а обеспечивает лишь качественную оценку, так как измерение выполняют только визуально без использования шкалы измерений. До настоящего времени не существует инструментов или способов, обеспечивающих количественные измерения величины угла отклонения линии центров тяжести сечений лопаток от радиального направления, если у лопаток нет какой-либо стороны, параллельной радиальному или тангенциальному направлению. Таким образом, существует необходимость в создании инструмента для количественного измерения угла между радиальной осью и линией центров тяжести сечений лопаток, в частности, для лопаток любой формы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Путем измерения отклонения линии центров тяжести сечений лопатки от радиального направления, выполняемого посредством измерительного инструмента и соответствующего способа измерения линии центров тяжести сечений прямой лопатки, простым и надежным образом, можно выполнять необходимую надлежащую корректировку лопатки.
В соответствии с первыми примерными вариантами выполнения предложен инструмент для измерения угла между радиальной осью и линией центров тяжести сечений цилиндрической лопатки осевой вращающейся машины, причем указанная лопатка проходит в радиальном наружном направлении от поверхности ступицы. Инструмент содержит основание, выполненное с возможностью указания радиального направления ступицы, компонент, выполненный с возможностью скольжения по лопатке и указания направления линии центров тяжести сечений цилиндрической лопатки, элементы отсчета, обеспечивающие шкалу отсчета, задающий элемент, выполненный с возможностью задания положения указанного компонента относительно основания, индикатор, выполненный с возможностью указания величины угла между направлением линии центров тяжести сечений и радиальным направлением с использованием элементов отсчета, причем этот угол соответствует углу между радиальной осью и линией центров тяжести сечений лопаток.
В соответствии со вторыми примерными вариантами выполнения предложен способ измерения угла между радиальной осью и линией центров тяжести сечений цилиндрической лопатки в осевой вращающейся машине с использованием инструмента, причем лопатка проходит в радиальном наружном направлении от поверхности ступицы. В соответствии с этим способом первый компонент инструмента располагают в радиальном направлении, затем второй компонент инструмента располагают в направлении линии центров тяжести сечений лопатки, и наконец определяют относительное положение первого и второго компонентов.
В соответствии с третьими примерными вариантами выполнения предложена цилиндрическая лопатка вращающейся машины, содержащая бандажную полку, причем бандажная полка имеет по меньшей мере одно отверстие (в частности, глухое отверстие) или по меньшей мере один штифт (в частности, выступающий штифт) для размещения средства для указания базы отсчета радиального направления на цилиндрической лопатке, при этом отверстие или штифт выполнены с возможностью взаимодействия с инструментом для измерения угла между радиальной осью и линией центров тяжести сечений цилиндрической лопатки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет более понятным из нижеследующего описания примерных вариантов выполнения, рассмотренных в сочетании с сопроводительными чертежами, на которых
фиг. 1А показывает лопатку, у которой линия центров тяжести сечений отклонена от радиального направления по первой причине,
фиг. 1В показывает лопатку, у которой линия центров тяжести сечений отклонена от радиального направления по второй причине,
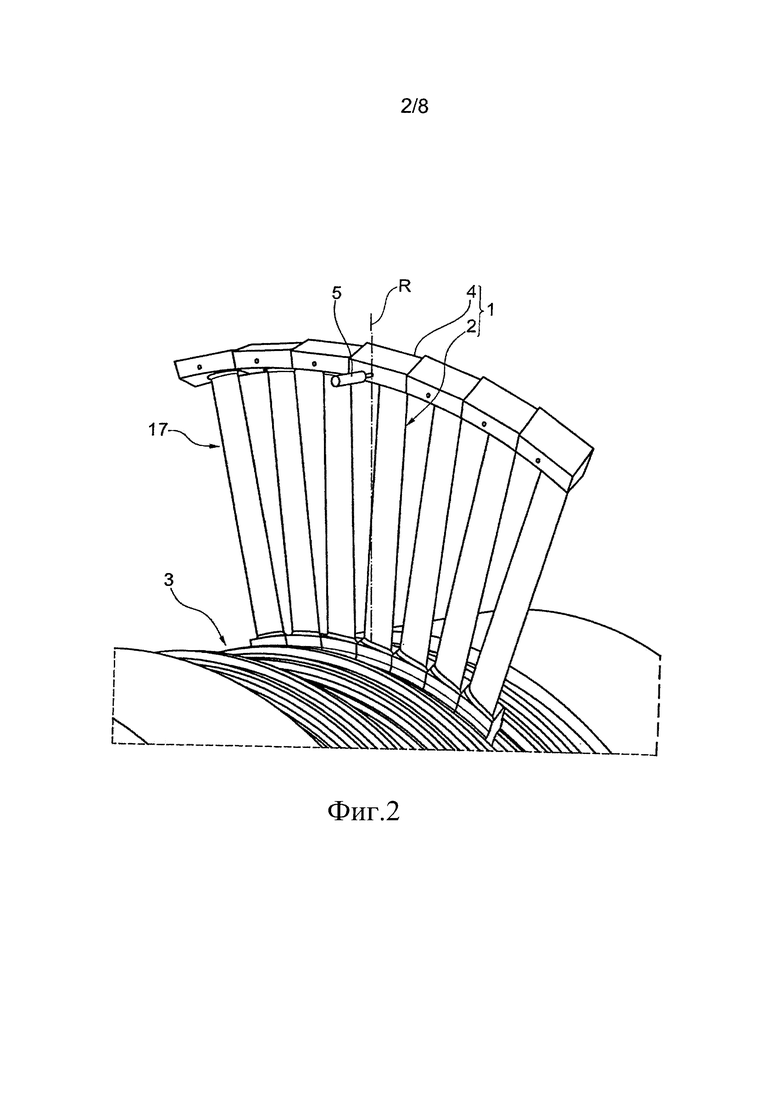
фиг. 2 показывает часть ступицы с цилиндрическими лопатками, одна из которых имеет штифт, вставленный в бандажную полку, для измерения угла между радиальной осью и линией центров тяжести сечений лопаток,
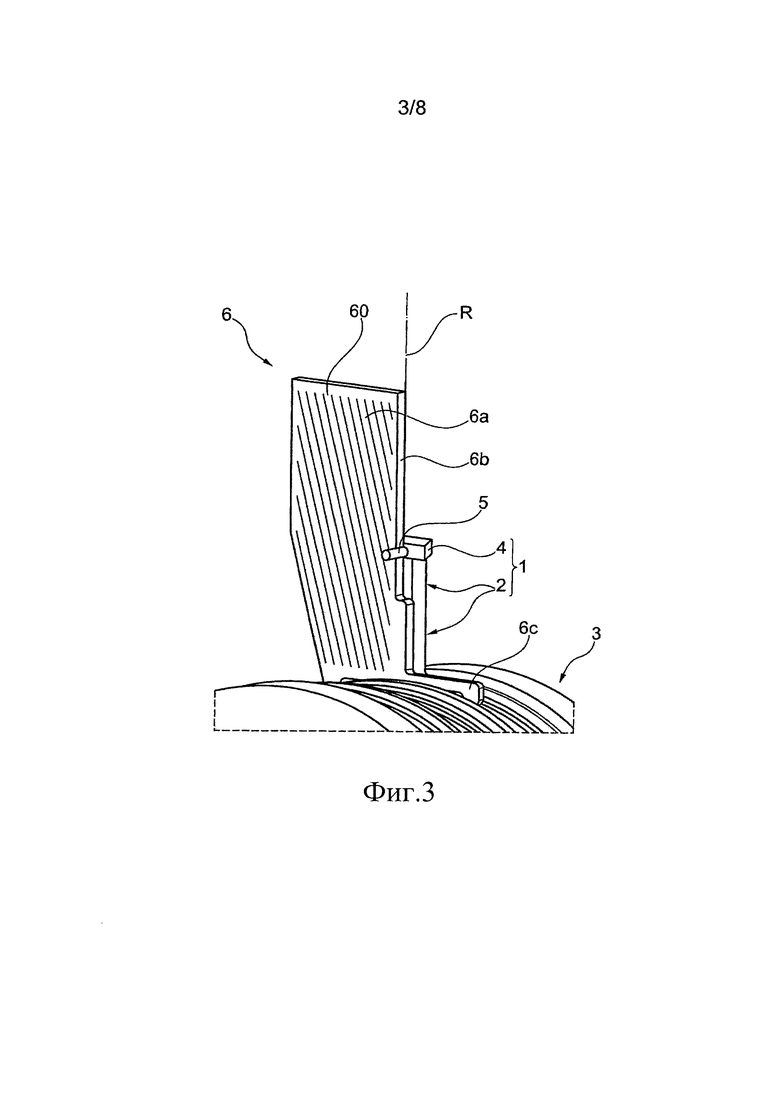
фиг. 3 показывает некоторые компоненты инструмента для измерения угла между радиальной осью и линией центров тяжести сечений лопаток,
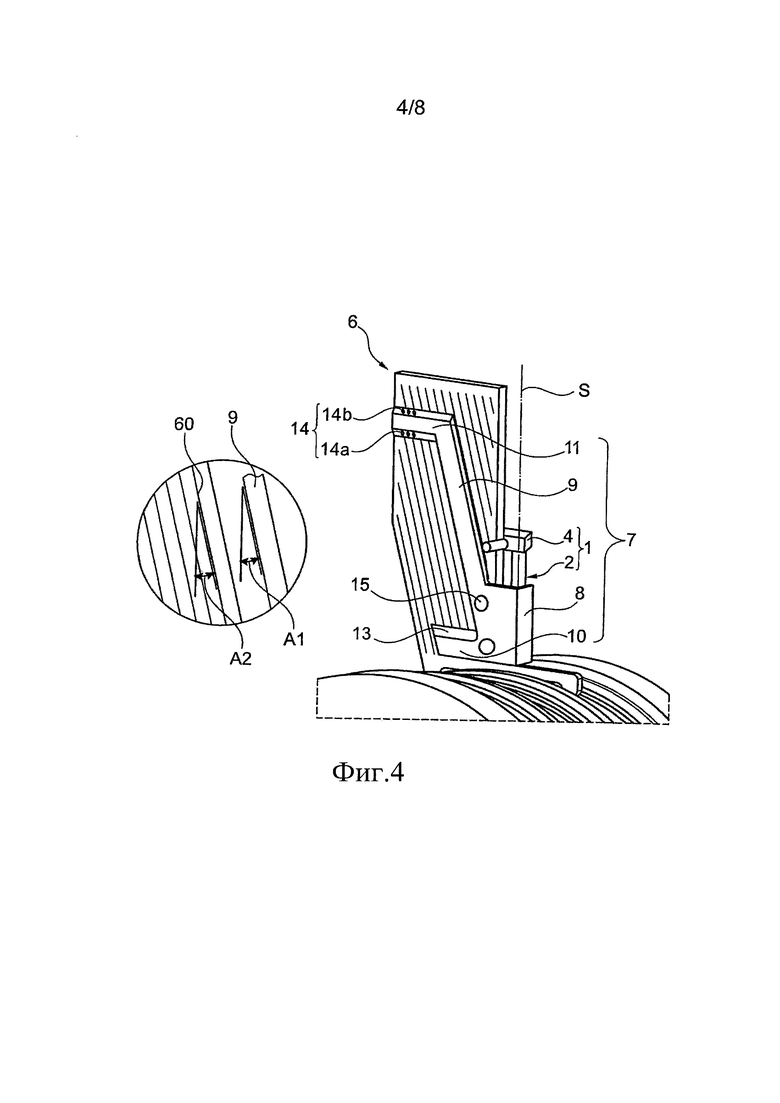
фиг. 4 показывает первый вариант выполнения инструмента для измерения угла между радиальной осью и линией центров тяжести сечений лопаток,
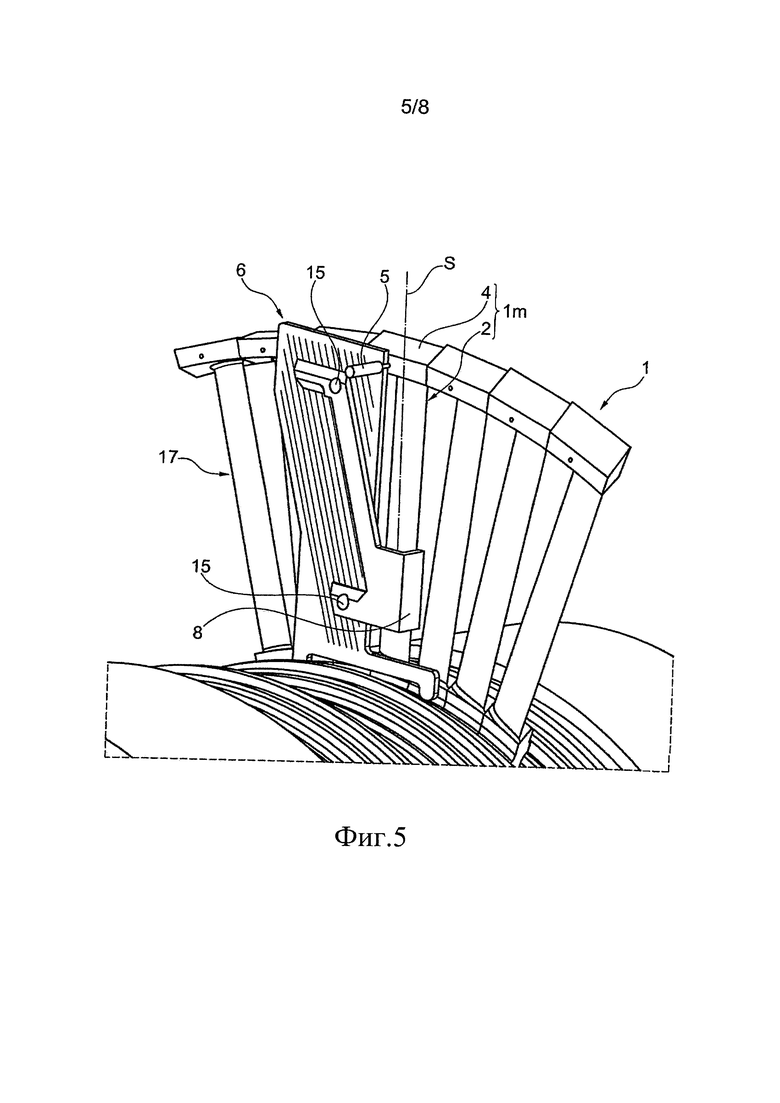
фиг. 5 показывает второй вариант выполнения инструмента для измерения угла между радиальной осью и линией центров тяжести сечений лопаток,
фиг. 6 показывает инструмент для измерения угла между радиальной осью и линией центров тяжести сечений лопаток в первом положении для выполнения первого этапа измерения,
фиг. 7 показывает инструмент для измерения угла между радиальной осью и линией центров тяжести сечений лопаток во втором положении для выполнения второго этапа измерения,
фиг. 8 иллюстрирует инструмент во втором положении, показанном на фиг. 7, но для выполнения третьего этапа измерения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Нижеследующее описание примерных вариантов выполнения приведено со ссылкой на сопроводительные чертежи. На различных чертежах одинаковыми ссылочными позициями обозначены одинаковые или подобные элементы. Нижеследующее подробное описание не ограничивает изобретение. Вместо этого объем правовой охраны определен в прилагаемой формуле изобретения.
В описании ссылка на «один вариант выполнения» или «вариант выполнения» означает, что конкретные признак, конструкция или характеристика, описанные в отношении варианта выполнения, включены по меньшей мере в один вариант выполнения настоящего изобретения. Таким образом, появление фразы «в одном варианте выполнения» или «в варианте выполнения» в различных местах описания не обязательно относится к одному и тому же варианту выполнения. Кроме того, конкретные признаки, конструкции или характеристики могут быть объединены любым подходящим способом в одном или более вариантах выполнения.
Вариант выполнения инструмента для измерения угла между радиальной осью и линией центров тяжести сечений пера лопаток содержит радиальную линейку 6 и измерительную линейку 7, как показано на фиг. 4 и 5. На других чертежах показаны части инструмента на видах в увеличенном масштабе, в частности во время процесса измерения.
На фиг. 2 показаны несколько цилиндрических лопаток 1, проходящих радиально от ступицы 3. Каждая лопатка проходит от пазового замка 18, расположенного на ступице 3, к бандажной полке 4. Ссылочной позицией 2 обозначена задняя кромка (каждой) лопатки 1, а ссылочной позицией 17 обозначена передняя кромка (каждой) лопатки 1. На бандажной полке 4 лопатки создана база отсчета. Указанная база отсчета определяет радиальную ось R, проходящую от ступицы 3 к лопатке 1. В одном варианте выполнения эта база отсчета получена с помощью глухого отверстия, просверленного на поверхности бандажной полки 4, лежащей в плоскости, нормальной к плоскости, в которой проходит лопатка. Таким образом, может быть измерен угол между радиальной осью R и линией центров тяжести сечений пера лопатки. В одном варианте выполнения в отверстие в бандажной полке 4 вставлен штифт 5. Таким образом, радиальная ось R проходит через штифт 5. При таком способе можно определить линию (ось) S центров тяжести сечений лопатки 1 относительно оси R и, соответственно, вычислить величину угла между этими двумя осями.
На фиг. 3 показана радиальная линейка 6 в положении измерения. В этом положении она лежит на поверхности ступицы 3 и находится в контакте со штифтом 5. В одном варианте выполнения радиальная линейка 6 имеет плоский корпус 6а, прикрепленный к основанию 6с. Плоский корпус 6а является перпендикулярным (в направлении радиальной оси R лопатки) основанию 6с. Основание 6с радиальной линейки 6 лежит на ступице 3. В одном варианте выполнения основание 6с выполнено с возможностью его контакта по касательной с цилиндрической поверхностью ступицы 3, при этом основание неподвижно лежит на ступице 3. Кроме того (как лучше видно на фиг. 5), основание 6с имеет удлиненную форму вдоль продольной оси, при этом его форма у центральной точки является симметричной относительно плоскости, перпендикулярной продольной оси. На двух соответствующих противоположных концах основания 6с имеются два выступающих элемента в форме двух ножек. Основание 6с входит в контакт со ступицей 3 посредством этих двух ножек. Таким образом, в каждом положении измерения радиальной линейки 6 на ступице 3 выделяют индивидуальную радиальную ось R лопатки.
Корпус 6а радиальной линейки 6 проходит вертикально в плоскости, перпендикулярной продольной оси основания 6с, и имеет по существу плоскую форму. Корпус 6а имеет боковую грань 6b, входящую в контакт со штифтом 5. Боковая грань 6b перпендикулярна основанию 6а и определяет радиальную ось, проходящую от ступицы 3. Когда радиальная линейка 6 введена в контакт со штифтом 5, линия боковой грани 6b, находящейся в контакте со штифтом 5, определяет радиальную ось R, которая должна соответствовать линии центров тяжести сечений измеряемой лопатки.
В положении измерения радиальная линейка 6 находится в контакте со штифтом 5 и со ступицей 3, однако, она не входит в непосредственный контакт с пером лопатки 1. В одном варианте выполнения плоский корпус 6а имеет несколько параллельных линий 60, расположенных под углом к радиальному направлению. Эти линии 60 могут быть нарисованы на поверхности корпуса 6а или выполнены на нем путем фрезерования на станке.
На фиг. 4 показан измерительный инструмент, радиальная линейка 6 и измерительная линейка 7 которого установлены, соответственно, на ступице 3 и на лопатке 1. Ради простоты на фиг. 4 показана лишь одна лопатка 1, хотя в типичном случае на ступице 3 находится более чем одна лопатка. Измерительная линейка 7 находится в контакте с задней кромкой 2 лопатки 1 и расположена на радиальной линейке 6. Измерительная линейка 7 содержит второй сегмент, расположенный в самой нижней области, причем данный сегмент имеет первый участок 10 отсчета, имеющий контрольную метку 13, используемую для определения положения измерительной линейки 7 относительно радиальной линейки 6.
В одном варианте выполнения измерительная линейка 7 имеет второй участок 11 отсчета, имеющий в свою очередь две параллельные стороны, на котором индикатор 14 с двумя метками содержит, соответственно, первую градуированную шкалу 14а и вторую градуированную шкалу 14b, смещенные относительно друг друга в соответствии с наклоном первого сегмента 9. В одном варианте выполнения первая градуированная шкала 14а выполнена с возможностью указания целочисленного значения угла между радиальной осью и линией центров тяжести сечений лопаток, а вторая градуированная шкала 14b выполнена с возможностью указания десятичного значения угла между радиальной осью и линией центров тяжести сечений лопаток. Кроме того, измерительная линейка 7 имеет указатель 14 с знака на втором участке 11 отсчета относительно указанных двух градуированных шкал 14а, 14b и выполнена с возможностью указания знака величины, измеряемой указанными шкалами 14а, 14b. Индикатор 14 должен быть выровнен своими метками с контрольной меткой 13.
В одном варианте выполнения измерительная линейка 7 дополнительно имеет у первого нижнего конца первую боковую сторону 8, выполненную с возможностью примыкания к задней кромке 2 лопатки 1, первый участок 10 отсчета, расположенный у второго верхнего конца, второй участок 11 отсчета, соединительный участок 9, соединяющий первый участок 10 отсчета, второй участок 11 отсчета и первую боковую сторону 8. Первая боковая сторона 8 проходит вертикально в том же направлении, что и лопатка 1. Соединительный участок 9 проходит в соответствии с наклонным направлением параллельно линиям 60. Как показано на виде А в увеличенном масштабе на фиг. 4, соединительный участок 9 наклонен под углом А1, а линии 60 в свою очередь наклонены под углом А2, причем углы А1 и А2 равны. Этот угол может лежать в широком диапазоне в соответствии с конструктивными требованиями инструмента и конкретным геометрическим построением лопатки.
Первый участок 10 отсчета и второй участок 11 отсчета проходят горизонтально и по существу перпендикулярно направлению первой боковой стороны 8. Предпочтительно поверхность первой боковой стороны 8, примыкающая к задней кромке 2, имеет плоскую форму, таким образом, имеется полный контакт между первой боковой стороной 8 и задней кромкой 2.
Измерительная линейка 7 находится в контакте с задней кромкой 2 лопатки 1 посредством первой боковой стороны 8, при этом она прикреплена к радиальной линейке 6с возможностью изменения ее направления на обратное. В частности, измерительная линейка 7 прикреплена к корпусу 6а радиальной линейки 6с возможностью изменения ее направления на обратное. В одном варианте выполнения измерительная линейка 7 у нижнего конца содержит пару магнитов 15, обеспечивающих возможность прикрепления с изменением направления на обратное. На первом участке 10 отсчета измерительной линейки 7 выполнена контрольная метка 13. Контрольная метка 13 выполнена с возможностью определения надлежащего выравнивания измерительной линейки 7 с параллельными линиями 60 и, тем самым, определения величины угла линии центров тяжести сечений лопатки 1, как будет более ясно в дальнейшем. В одном варианте выполнения контрольная метка 13 представляет собой линию, нарисованную или выполненную путем фрезерования на станке с углом наклона, равным углу наклона линий 60 на радиальной линейке 6 и соединительном участке 9 (т.е. углы А1 и А2).
На втором участке 11 отсчета расположена измерительная шкала 14, выполненная с возможностью определения величины угла линии центров тяжести сечений лопатки 1. В одном варианте выполнения указанная шкала 14 содержит первую шкалу 14а, выполненную с возможностью указания целочисленной части угла линии центров тяжести сечений, и вторую шкалу 14b, выполненную с возможностью указания десятичной части угла линии центров тяжести сечений. Угол линии центров тяжести сечений как с целочисленной частью, так и с десятичной частью измеряют в соответствии с параллельными линиями 60, как будет более ясно в дальнейшем.
Таким образом, в одном варианте выполнения полное представление о величине угла линии центров тяжести сечений получают путем считывания целочисленной части с первой шкалы 14а и десятичной части со второй шкалы 14b.
Как упомянуто выше, измерительная линейка 7 прикреплена к радиальной линейке 6с возможностью изменения ее направления на обратное направление, при этом она примыкает первой боковой стороной 8 к задней кромке 2 лопатки 1. Такое конструктивное решение дает возможность перемещать измерительную линейку вдоль линии S центров тяжести сечений лопатки 1 и, соответственно, выполнять измерение величины угла линии центров тяжести сечений относительно линии 60, расположенной на радиальной линейке 6.
На фиг. 5 показан другой вариант выполнения инструмента для измерения угла между радиальной осью и линией центров тяжести сечений лопаток. Как можно видеть, на чертеже показано несколько лопаток 1. Следует отметить, что лопатки, расположенные рядом с измеряемой лопаткой (обозначенной на чертеже ссылочной позицией 1 т), не мешают выполнять процедуру измерения. В действительности, инструмент и лопатки 1 проходят вертикально вдоль двух параллельных и отстоящих на некотором расстоянии плоскостей, в свою очередь перпендикулярных оси вращения ступицы. В этом случае операции, выполняемые для измерения, а именно расположение радиальной линейки 6 на поверхности ступицы 3 и прикрепление измерительной линейки к радиальной линейке 6с надлежащим контактом с задней кромкой 2, не оказывают влияния на соседние лопатки.
Вариант выполнения, показанный на фиг. 5, отличается от варианта выполнения, показанного на фиг. 4, другим расположением магнитов 15. В этом варианте выполнения первый магнит установлен в первом участке 10 отсчета, а второй магнит установлен во втором участке 11 отсчета. При таком способе прикрепление происходит по всей длине измерительной линейки. Такое конструктивное решение может быть особенно целесообразным в случае, когда инструмент имеет большие размеры и выполнен с возможностью измерения угла линии центров тяжести сечений для соответствующих лопаток большого размера.
На фиг. 6-8 показан вариант выполнения инструмента для измерения угла между радиальной осью и линией центров тяжести сечений лопаток в различных положениях, чтобы объяснить этапы способа измерения угла между радиальной осью и линией центров тяжести сечений для лопатки 1.
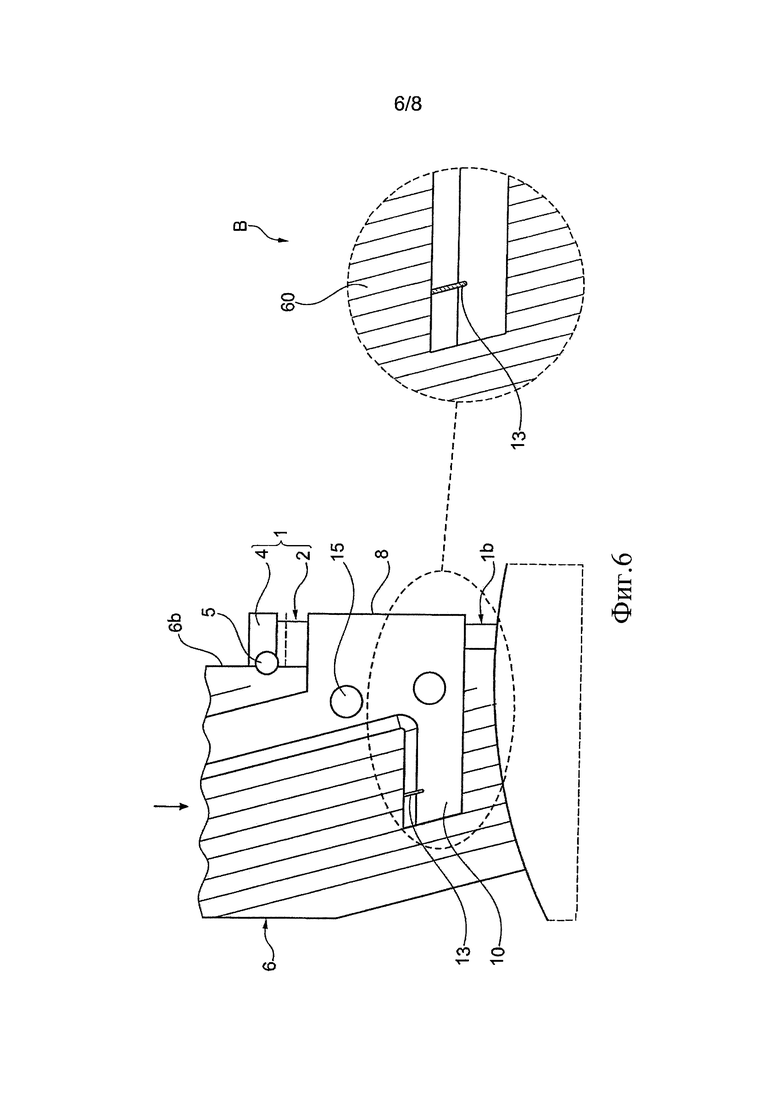
На фиг. 6 указанный инструмент показан в первом положении.
Механик выбирает лопатку, которую необходимо измерить, т.е. лопатку 1, показанную на фиг. 6, затем вставляет штифт 5 в отверстие бандажной полки 4 и устанавливает радиальную линейку 6 на ступицу 3 таким образом, что грань 6b входит в контакт со штифтом 5. И в заключение закрепляет измерительную линейку 7 на радиальной линейке 6с примыканием первой боковой стороны 8 к задней кромке 2. В этом состоянии механик проверяет выравнивание контрольной метки 13 относительно линий 60. Предполагается, что при выравнивании одна из линий 60 и метка 13 образуют прямой отрезок. Как показано на чертеже, измерительная линейка 7 не входит в контакт со ступицей 3, но между линейкой 7 и ступицей 3 имеется участок лопатки 1b.
На фиг. 6 показано, что лопатка 1 имеет угол между радиальной осью и линией центров тяжести сечений лопаток. Как показано на виде В в увеличенном масштабе, это состояние может быть легко определено в результате несовпадения контрольной метки 13 и линии 60. Таким образом, механик понимает, что измеряемая лопатка 1 имеет угол между радиальной осью и линией центров тяжести сечений лопаток, и следующие этапы способа направлены на определение величины этого угла для внесения соответствующей корректировки и доработки.
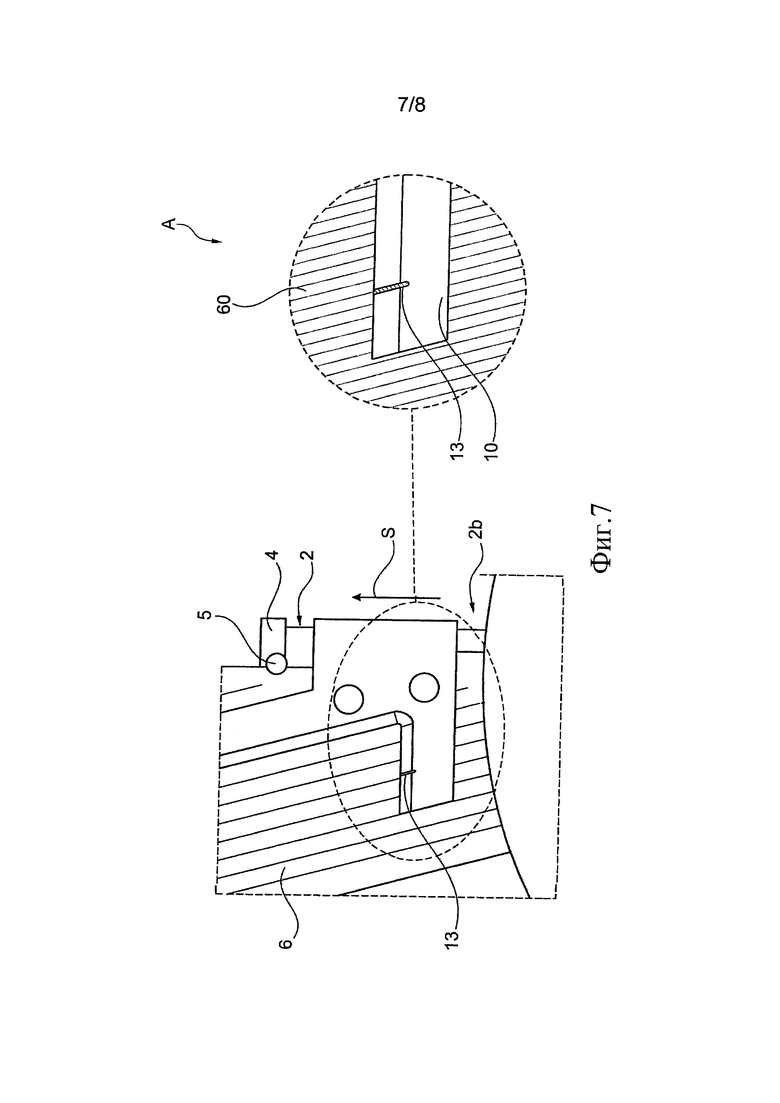
На фиг. 7 указанный инструмент показан во втором положении. На этом втором этапе показано, что механик передвинул линейку 7, чтобы получить количественный показатель угла линии центров тяжести сечений.
Механик совместил контрольную метку 13 с одной из линий 60 путем перемещения линейки 7 в соответствии с направлением, обозначенным стрелкой S, которое соответствует линии центров тяжести сечений лопатки 1. Как показано на виде С в увеличенном масштабе, перемещение линейки 7 можно закончить, когда метка 13 совместится с линий 60. В этом случае перемещение линейки 7 направлено вверх, при этом несколько увеличился участок 2b лопатки между линейкой 7 и ступицей 3.
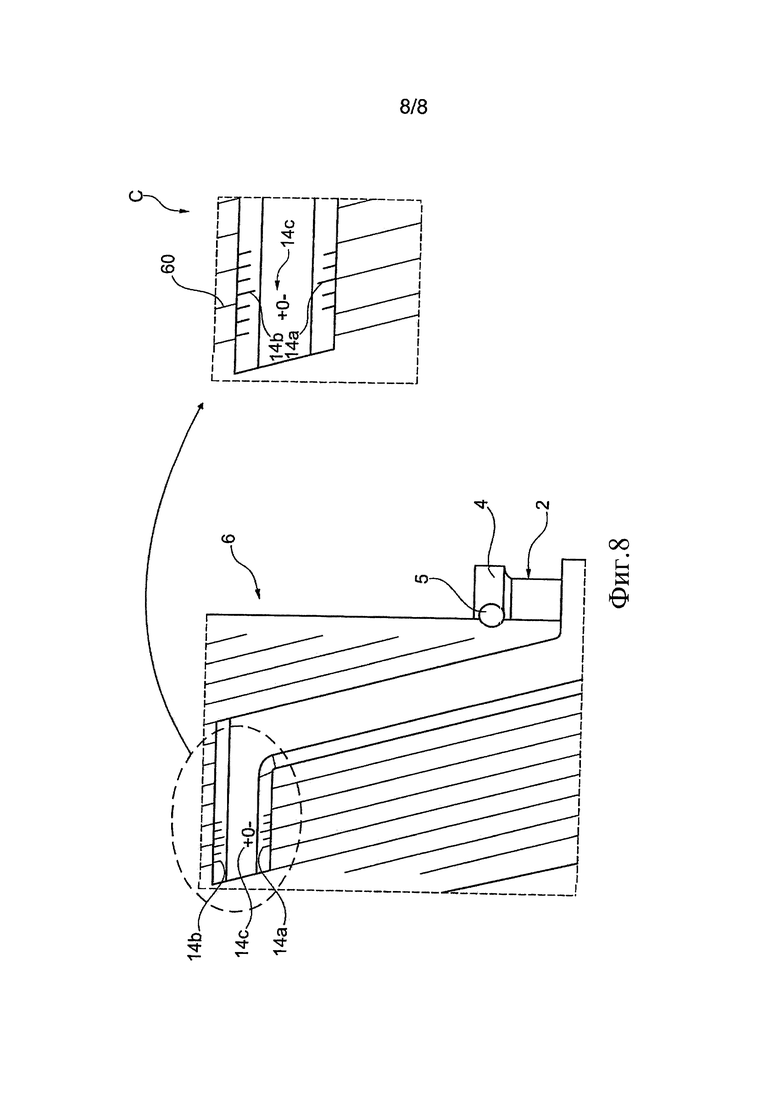
На фиг. 8 указанный инструмент показан в том же втором положении (как показано на фиг. 7), но на этапе измерения.
Механик должен считать угол линии центров тяжести сечений на втором участке 11 отсчета. В одном варианте выполнения градуированная шкала, предназначенная для измерения угла между радиальной осью и линией центров тяжести сечений лопаток, содержит первую градуированную шкалу 14а, вторую градуированную шкалу 14b и указатель 14 с знака.
Первая градуированная шкала 14а предназначена для указания целочисленного значения угла между радиальной осью и линией центров тяжести сечений лопаток. Вторая градуированная шкала 14b связана с первой градуированной шкалой 14а и предназначена для указания десятичного значения целочисленного значения угла между радиальной осью и линией центров тяжести сечений лопатки, считываемого с первой шкалы 14а. Указатель 14 с знака предназначен для указания знака угла линии центров тяжести сечений. Предпочтительно первая градуированная шкала 14а выполнена на первом участке второго участка 11 отсчета, проксимальном к ступице 3, вторая градуированная шкала 14b выполнена на втором противоположном участке, второго участка 11 отсчета, дистальном к ступице 3, и указатель 14 с знака выполнен на центральном участке второго участка 11 отсчета, расположенном между первым и вторым участками. В одном варианте выполнения первая градуированная шкала 14а состоит из нескольких параллельных отрезков, расположенных под одинаковыми углами А1 и А2. Каждый отрезок указывает целочисленное значение угла линии центров тяжести сечений. Центральный отрезок (самый длинный из показанных на чертеже) соответствует значению 0°. Два отрезка, соответственно, смежные с центральным отрезком, указывают величину в 1° (знак этого угла определен указателем 14 с знака, как будет более ясно в дальнейшем). Два отрезка на противоположных сторонах указывают значение в 2° (знак этого угла определен указателем 14 с знака, как будет более ясно в дальнейшем). Вторая градуированная шкала 14b указывает десятичное значение целочисленного значения, указанного первой градуированной шкалой 14а. Таким образом, центральный отрезок (самый длинный) соответствует значению угла, равному 0°. Первые два отрезка, смежные с центральным отрезком и симметричные относительно него, указывают величину, равную 0,5°, для целочисленного значения в 0°. Соответственно, полный измеренный угол составляет 0,5°. Вторые два отрезка, смежные с центральным отрезком и симметричные относительно него, указывают величину, равную 0,5°, для целочисленного значения в 1°. Соответственно, полный измеренный угол составляет 1,5°. Третьи два отрезка, расположенные с противоположных сторон центрального отрезка и симметричные относительно него, указывают величину, равную 0,5°, для целочисленного значения в 2°. Соответственно, полный измеренный угол составляет 2,5°. В одном варианте выполнения указатель 14с знака содержит «0» значение в центральном положении, выровненном с центральными отрезками первой и второй градуированных шкал 14а, 14b. Слева от значения «0» расположен знак «+». Знак «+» указывает на то, что отрезки, расположенные слева от центральных отрезков (как первой, так и второй градуированных шкал 14а, 14b), относятся к положительным углам. Справа от значения «0» напротив знака «+» имеется другой знак, обозначенный символом «-», указывающий на то, что отрезки, расположенные справа от центральных отрезков (как первой, так и второй градуированных шкал 14а, 14b), относятся к отрицательным углам.
Проиллюстрированный на фиг. 8 способ считывания угла линии центров тяжести сечений выполняют следующим образом. Механик проверяет, какой из отрезков шкалы 14а в большей степени совмещен с линией 60. Как показано на чертеже, отрезок под ссылочной позицией 14а (первый отрезок, расположенный слева за центральным отрезком) является отрезком, совмещенным с линией 60 в большей степени. Этот отрезок расположен в части, обозначенной знаком «+» указателя 14с знака. Таким образом, целочисленная часть угла линии центров тяжести сечений равна +1°. Десятичную часть считывают подобным образом. Механик проверяет, какой из отрезков под ссылочной позицией 14b в большей степени совмещен с линией 60. Как показано на чертеже, отрезок, обозначенный позицией 14b (первый отрезок, расположенный слева за центральным отрезком), является отрезком, совмещенным с линией 60 в большей степени. Таким образом, десятичная часть угла линии центров тяжести сечений равна +0,5°. Соответственно, значение угла между радиальной осью и линией центров тяжести сечений лопатки равно +1,5°. В лопатке, не имеющей угла между радиальной осью и линией центров тяжести сечений, оба центральных отрезка выровнены с одной из линий 60.
Первая и вторая градуированные шкалы 14а, 14b могут быть выполнены для измерения углов между радиальной осью и линией центров тяжести сечений лопатки в большом диапазоне, в зависимости от конструктивных особенностей лопатки, которую необходимо измерить. Соответственно, может варьироваться разрешение измеряемого угла.
В целом, предложен способ измерения угла между радиальной осью и линией центров тяжести сечений лопатки, в котором первый компонент инструмента, в частности, основание 6с радиальной линейки 6, располагают в соответствии с радиальным направлением R, а затем второй компонент инструмента, в частности, измерительную линейку 7, располагают в соответствии с линией S центров тяжести сечений лопатки, и наконец определяют относительное положение указанного первого и второго компонентов, т.е. выполняют количественное измерение.
В частности, в соответствии с чертежами, иллюстрирующими варианты выполнения инструмента, предложенный способ включает следующие этапы: а) расположение средства, т.е. штифта 5, для указания отсчета радиального направления; b) установку первого компонента, т.е. радиальной линейки 6 в контакте с данным средством для указания отсчета радиального направления; с) установку второго компонента, т.е. измерительной линейки 7, в контакте с задней или с передней кромкой лопатки; d) перемещение второго компонента (7) скользящим движением в радиальном направлении, с сохранением в то же время его контакта с лопаткой, до выравнивания задающего элемента (13), расположенного на втором компоненте (7), с одним из элементов (60) отсчета, расположенных на первом компоненте (6); и е) считывание угла путем сопоставления индикатора (14), расположенного на втором компоненте (7), с конкретным элементом отсчета первого компонента (6), только что выровненного с задающим элементом (13) второго компонента (7).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАМЕРА АМПЛИТУД КОЛЕБАНИЙ БАНДАЖИРОВАННЫХ ЛОПАТОК ТУРБИНЫ ДИСКРЕТНО-ФАЗОВЫМ МЕТОДОМ | 1996 |
|
RU2143103C1 |
| Устройство для снятия мерок с фигуры человека | 1977 |
|
SU695653A2 |
| ПОДВИЖНАЯ ЛОПАТКА ТУРБОМАШИНЫ И ТУРБОМАШИНА | 2011 |
|
RU2602727C2 |
| Устройство для снятия мерок с фигуры человека | 1974 |
|
SU549138A2 |
| Ротор турбины низкого давления (ТНД) газотурбинного двигателя (варианты), узел соединения вала ротора с диском ТНД, тракт воздушного охлаждения ротора ТНД и аппарат подачи воздуха на охлаждение лопаток ротора ТНД | 2018 |
|
RU2684355C1 |
| СПОСОБ БАЛАНСИРОВКИ ЛОПАТОЧНОГО КОЛЕСА МАШИНЫ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛОПАТОК ЛОПАТОЧНОГО КОЛЕСА МАШИНЫ | 1994 |
|
RU2082072C1 |
| ОБЛОПАЧЕННЫЙ ЭЛЕМЕНТ ДЛЯ ТУРБОМАШИНЫ И ТУРБОМАШИНА | 2012 |
|
RU2598970C2 |
| Устройство для измерения зазора в лопатках диска рабочего колеса турбины | 1980 |
|
SU998845A1 |
| ЛОПАСТЬ РУЛЕВОГО ВИНТА ВЕРТОЛЕТА И РУЛЕВОЙ ВИНТ ВЕРТОЛЕТА | 2009 |
|
RU2494012C2 |
| СПОСОБ УСТАНОВКИ ЛОПАТОК ПО ПЕРИФЕРИИ ДИСКА ТУРБИННОГО ДВИГАТЕЛЯ И ИНСТРУМЕНТ ДЛЯ МОНТАЖА ЛОПАТКИ | 2015 |
|
RU2701925C2 |
Изобретение относится к машиностроению. Способ измерения угла между радиальной осью и линией центров тяжести сечений цилиндрической лопатки осевой вращающейся машины с использованием инструмента, причем указанная лопатка (1) проходит в радиальном наружном направлении от поверхности ступицы (3), при этом первый компонент (6) инструмента располагают в радиальном направлении (R), затем второй компонент (7) инструмента располагают в соответствии с направлением (S) линии центров тяжести сечений указанной лопатки и, наконец, определяют относительное положение первого и второго компонентов (6, 7). 2 н. и 10 з.п. ф-лы, 8 ил.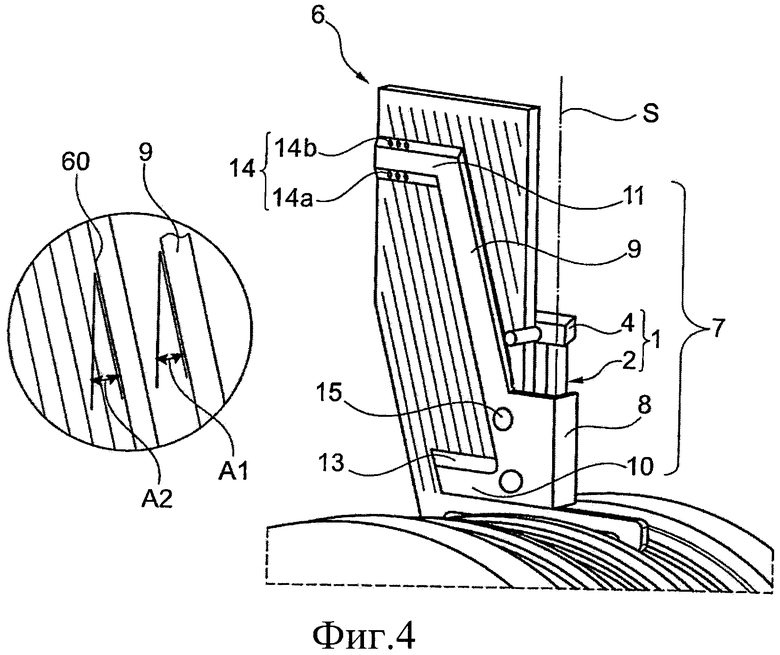
1. Инструмент для измерения угла между радиальной осью и линией центров тяжести сечений цилиндрической лопатки (1) осевой вращающейся машины, причем указанная лопатка (1) проходит в радиальном наружном направлении от поверхности ступицы (3), при этом указанный инструмент содержит
основание (6с), выполненное с возможностью указания радиального направления (R) ступицы (3),
компонент (7), выполненный с возможностью скольжения по лопатке (1) и указания направления (S) линии центров тяжести сечений цилиндрической лопатки (1),
элементы (60) отсчета, обеспечивающие шкалу отсчета,
задающий элемент (13), выполненный с возможностью задания положения указанного компонента (7) относительно основания (6с),
индикатор (14), выполненный с возможностью указания величины угла между направлением линии центров тяжести сечений лопатки и радиальным направлением с использованием элементов (60) отсчета,
причем указанный угол соответствует углу между радиальной осью и линией центров тяжести сечений лопатки.
2. Инструмент по п.1, содержащий средство указания базы отсчета радиального направления на указанной цилиндрической лопатке (1), определяющей радиальное направление (R), проходящее через указанную базу отсчета, и выравнивания основания (6с) с лопаткой (1) в радиальном направлении, когда указанное средство и основание (6с) находятся в контакте.
3. Инструмент по п.2, в котором средство указания базы отсчета радиального направления содержит штифт (5), присоединенный к поверхности бандажной полки (4) лопатки (1).
4. Инструмент по п.1, в котором основание (6с) выполнено с возможностью расположения на боковой наружной поверхности ступицы (3).
5. Инструмент по п.4, в котором основание (6с) содержит два элемента, выполненных с возможностью расположения на ступице (3) для выравнивания основания (6с) с плоскостью, перпендикулярной оси вращения ступицы.
6. Инструмент по п.1, в котором элементы (60) отсчета представляют собой ряд параллельных линий, нанесенных на поверхность удлиненного корпуса (6а), предпочтительно плоского, прикрепленного к основанию (6) и имеющего боковую сторону (6b), совпадающую с радиальным направлением (R), причем указанные параллельные линии (60) наклонены относительно радиального направления (R).
7. Инструмент по п.6, в котором задающий элемент (13) присоединен к указанному компоненту (7) или выполнен с ним за одно целое, при этом измерительное положение инструмента достигается, когда указанный компонент (7) проводится скользящим движением по лопатке (1) до тех пор, когда задающий элемент (13) совместится с одним из элементов (60) отсчета.
8. Инструмент по п.7, в котором индикатор (14) присоединен к указанному компоненту (7) или выполнен с ним за одно целое, при этом величина указанного угла указывается индикатором (14) с использованием указанного одного из элементов (60) отсчета, совмещенного с задающим элементом (13).
9. Инструмент по п.1, в котором указанный компонент (7) выполнен с возможностью совмещения с задней кромкой (2) или передней кромкой (17) лопатки (1) для содействия скольжению компонента (7) по лопатке (1).
10. Инструмент по п.1, в котором индикатор (14) содержит первую градуированную шкалу (14а) и вторую градуированную шкалу (14b), смещенные относительно друг друга в соответствии с заданным значением для указания соответственно целочисленного и десятичного значения угла между радиальной осью и линией центров тяжести сечений лопатки.
11. Способ измерения угла между радиальной осью и линией центров тяжести сечений цилиндрической лопатки осевой вращающейся машины с использованием инструмента, причем указанная лопатка (1) проходит в радиальном наружном направлении от поверхности ступицы (3), при этом первый компонент (6) инструмента располагают в радиальном направлении (R), затем второй компонент (7) инструмента располагают в соответствии с направлением (S) линии центров тяжести сечений указанной лопатки и, наконец, определяют относительное положение первого и второго компонентов (6, 7).
12. Способ по п.11, в котором используют инструмент по любому из пп.1-10 и выполняют следующие этапы:
а) располагают средство указания отсчета радиального направления,
b) устанавливают первый компонент (6) в контакте с указанным средством указания отсчета радиального направления,
с) устанавливают второй компонент (7) в контакте с задней кромкой (2) или передней кромкой (17) лопатки (1),
d) перемещают скользящим движением второй компонент (7) в радиальном направлении при его одновременном контакте с лопаткой (1) до тех пор, когда задающий элемент (13) совместится с одним из элементов (60) отсчета, и
е) считывают угол путем сопоставления индикатора (14) с указанным одним из элементов (60) отсчета, совмещенным с задающим элементом (13).
| US 4987555 A, 22.01.1991 | |||
| СБОР ЛЕКАРСТВЕННЫХ РАСТЕНИЙ, ОБЛАДАЮЩИЙ УСПОКОИТЕЛЬНЫМ И ГИПОТЕНЗИВНЫМ ДЕЙСТВИЕМ | 1992 |
|
RU2019185C1 |
| US 2008209747 A1, 04.09.2008 | |||
| US 4411073 A, 25.10.1983. | |||

