Изобретение относится к способу увеличения чувствительности пьезопреобразователя (пьезоэлектрического или магнитострикционного) биморфного типа (биморфа), а именно биморфного пьезоактюатора или биморфного пьезосенсора изгибного типа и предназначено для использования в микромеханике, электронике, управляемой оптике, медицине.
Известен способ увеличения пьезочувствительности пьезоэлемента изгибного типа [Никифоров В.Г., Климашин В.М., Сафронов А.Я. Биморфные пьезоэлектрические элементы: актюаторы и датчики// Компоненты и технологии. – 2003. - № 4. - С.46-48], при котором используют биморфные пьезоэлементы (биморфы) изгибного типа. Биморф состоит из двух или более соединенных друг с другом однородных пьезопластин равной толщины с одинаковой или противонаправленной поляризацией, внутренних и наружных электродов.
Недостатком известного способа является малое повышение пьезочувствительности биморфа изгибного типа вследствие малости абсолютных значений пьезоэлектрических или магнитострикционных пьезоконстант материала слоев биморфа.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ повышения пьезочувствительности биморфа в составе конструкции [см. патент RU №2723567, опубл.: 16.06.2020], при котором гибкий биморф закрепляют на гибкой подложке (элементе конструкции – обшивке аэродинамического профиля лопасти), а повышение пьезочувствительности биморфа осуществляют посредством использования начального сжатия гибкой подложки. Биморф используют для работы в двух режимах: в режиме гибкого пьезоактюатора и в режиме генератора как гибкий пьезодатчик, при этом осуществляют начальное сжатие биморфа (опосредованно через сжатие его подложки), осуществляют (в режиме пьезоактюатора) приложение управляющего электрического напряжения  к электродам биморфа с целью механического воздействия биморфа на внешние объекты или осуществляют (в режиме гибкого датчика) измерение значений информативного электрического напряжения
к электродам биморфа с целью механического воздействия биморфа на внешние объекты или осуществляют (в режиме гибкого датчика) измерение значений информативного электрического напряжения  или электрического заряда
или электрического заряда  на электродах биморфа с целью измерения величины внешнего силового воздействия.
на электродах биморфа с целью измерения величины внешнего силового воздействия.
Недостатком известного способа, принятого за прототип, является малое повышение пьезочувствительности биморфа изгибного типа, вследствие опосредованного (через область контакта биморфа с подложкой) действия на биморф сжимающей нагрузки и наличия значительной изгибной жесткости подложки по отношению к изгибной жесткости биморфа.
Признаки прототипа, совпадающие с существенными признаками заявляемого изобретения – используют биморф изгибного типа для работы в двух режимах: в режиме гибкого пьезоактюатора и в режиме генератора как гибкий пьезодатчик; осуществляют начальное сжатие биморфа; осуществляют в режиме пьезоактюатора приложение управляющего электромагнитного воздействия к биморфу с целью механического воздействия биморфа на внешние объекты или осуществляют в режиме пьезодатчика измерение значений возникающего информативного электромагнитного сигнала биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа.
Задачей, на решение которой направлено изобретение, является создание способа увеличения пьезочувствительности биморфа изгибного типа с увеличением диапазона допустимых значений изгибных деформаций (прогибов) в режиме пьезоактюатора и с увеличением значений возникающего информативного электромагнитного сигнала биморфа в режиме пьезодатчика для случая квазистатического или динамического (циклического) внешнего воздействия.
Поставленная задача была решена за счет того, что в известном способе увеличения пьезочувствительности биморфа изгибного типа, при котором используют биморф изгибного типа для работы в двух режимах: в режиме гибкого пьезоактюатора и в режиме генератора как гибкий пьезодатчик, осуществляют начальное сжатие биморфа, осуществляют в режиме пьезоактюатора приложение управляющего электромагнитного воздействия к биморфу с целью механического воздействия биморфа на внешние объекты
или осуществляют в режиме пьезодатчика измерение значений возникающего информативного электромагнитного сигнала биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа, согласно изобретению используют непосредственное начальное сжатие биморфа вдоль нейтральной линии биморфа стержневого типа приложенной продольной силой P на торцах стержня или начальное сжатие биморфа в плоскости нейтрального слоя биморфа мембранного типа приложенным давлением p по внешнему контуру мембраны, при этом величина силы P < P1 или давления p < p1 начального сжатия меньше значения силы P1 или давления p1 потери устойчивости биморфа с учетом его геометрических, физико-механических характеристик и способа закрепления.
В частности, используют пьезоэлектрический биморф изгибного типа для работы в двух режимах: в режиме гибкого пьезоэлектрического актюатора и в режиме генератора как гибкий пьезоэлектрический датчик, при этом осуществляют в режиме пьезоэлектрического актюатора приложение управляющего электрического напряжения  к электродам биморфа с целью механического воздействия биморфа на внешние объекты или осуществляют в режиме гибкого датчика измерение значений информативного электрического напряжения
к электродам биморфа с целью механического воздействия биморфа на внешние объекты или осуществляют в режиме гибкого датчика измерение значений информативного электрического напряжения  или электрического заряда
или электрического заряда  на электродах биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа.
на электродах биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа.
В частности, используют магнитострикционный биморф изгибного типа для работы в режиме гибкого пьезоэлектрического актюатора, при этом осуществляют приложение управляющего магнитного поля к биморфу.
Признаки заявляемого технического решения, отличительные от прототипа, – используют непосредственное начальное сжатие биморфа вдоль нейтральной линии биморфа стержневого типа приложенной продольной силой P на торцах стержня или начальное сжатие биморфа в плоскости нейтрального слоя биморфа мембранного типа приложенным давлением p по внешнему контуру мембраны, при этом величина силы P < P1 или давления p < p1 начального сжатия меньше значения силы P1 или давления p1 потери устойчивости биморфа с учетом его геометрических, физико-механических характеристик и способа закрепления; используют пьезоэлектрический биморф изгибного типа для работы в двух режимах: в режиме гибкого пьезоэлектрического актюатора и в режиме генератора как гибкий пьезоэлектрический датчик, при этом осуществляют в режиме пьезоэлектрического актюатора приложение управляющего электрического напряжения к электродам биморфа с целью механического воздействия биморфа на внешние объекты или осуществляют в режиме гибкого датчика измерение значений информативного электрического напряжения или электрического заряда на электродах биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа; используют магнитострикционный биморф изгибного типа для работы в режиме гибкого пьезоэлектрического актюатора, при этом осуществляют
приложение управляющего магнитного поля к биморфу.
Отличительные признаки в совокупности с известными позволяют увеличить пьезочувствительность биморфа изгибного типа с увеличением диапазона допустимых значений изгибных деформаций (прогибов) в режиме пьезоактюатора и с увеличением значений возникающего информативного электромагнитного сигнала биморфа в режиме пьезодатчика для случая квазистатического или динамического (циклического) внешнего воздействия.
В режиме пьезоактюатора увеличение пьезочувствительности биморфа изгибного типа и увеличение диапазона допустимых значений его изгибных деформаций (прогибов) достигается в результате появления дополнительных прогибов, обусловленных действием начальной сжимающей механической нагрузки на искривленный (в силу обратного пьезоэффекта) биморф, т.е. начальная сжимающая механическая нагрузка как «усилитель» увеличивает изгибные деформации (прогибы) биморфа от действия управляющего электромагнитного воздействия на биморф.
При смене знака управляющего, в частности, электрического напряжения  на электродах биморфа меняется на противоположное направление изгиба биморфа с сохранением эффекта «усиления» от действия начальной сжимающей механической нагрузки.
на электродах биморфа меняется на противоположное направление изгиба биморфа с сохранением эффекта «усиления» от действия начальной сжимающей механической нагрузки.
При = 0 биморф не искривляется (так как сжимающая механическая нагрузка лишь сжимает, но не изгибает биморф в исходном прямолинейном состоянии) или возвращается из изогнутого в исходное прямолинейное состояние (так как величина сжимающей механической нагрузки не превышает соответствующее значение нагрузки для потери устойчивости биморфа).
В режиме гибкого датчика увеличение пьезочувствительности биморфа изгибного типа и увеличение диапазона допустимых значений информативного электрического напряжения  и электрического заряда
и электрического заряда  на электродах биморфа достигается также в результате эффекта «усиления» - появления дополнительных прогибов, обусловленных действием начальной сжимающей механической нагрузки на искривленный (под действием диагностируемого силового воздействия) биморф в силу прямого пьезоэффекта биморфа.
на электродах биморфа достигается также в результате эффекта «усиления» - появления дополнительных прогибов, обусловленных действием начальной сжимающей механической нагрузки на искривленный (под действием диагностируемого силового воздействия) биморф в силу прямого пьезоэффекта биморфа.
Заявителю неизвестно использование в науке и технике отличительных признаков заявленного способа увеличения пьезочувствительности биморфа изгибного типа с получением указанного технического результата.
Предлагаемый способ увеличения пьезочувствительности биморфа изгибного типа в режиме, в частности, пьезоэлектрического актюатора, например, при положительном значении приложенного к электродам биморфа управляющего электрического напряжения  > 0 (знак величины определяет направление отклонения изогнутой продольной оси стержня или нейтрального слоя мембраны биморфа от начального прямолинейного вида) иллюстрируется чертежами, представленными на фиг.1-3.
> 0 (знак величины определяет направление отклонения изогнутой продольной оси стержня или нейтрального слоя мембраны биморфа от начального прямолинейного вида) иллюстрируется чертежами, представленными на фиг.1-3.
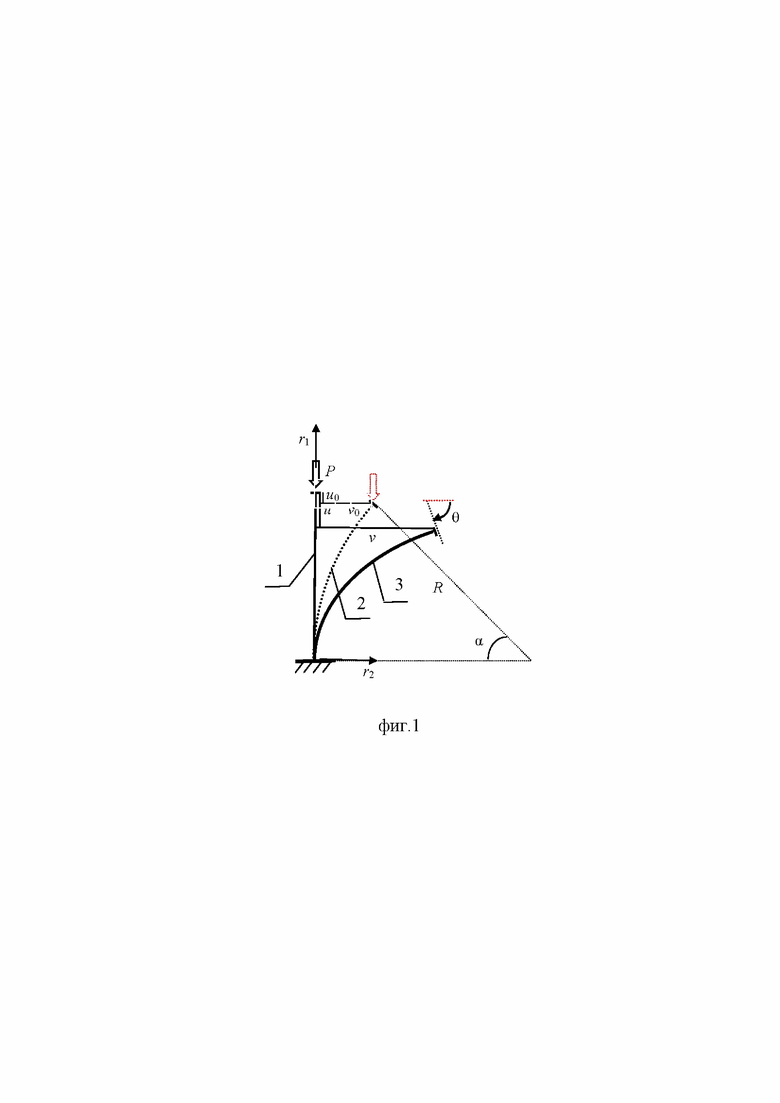
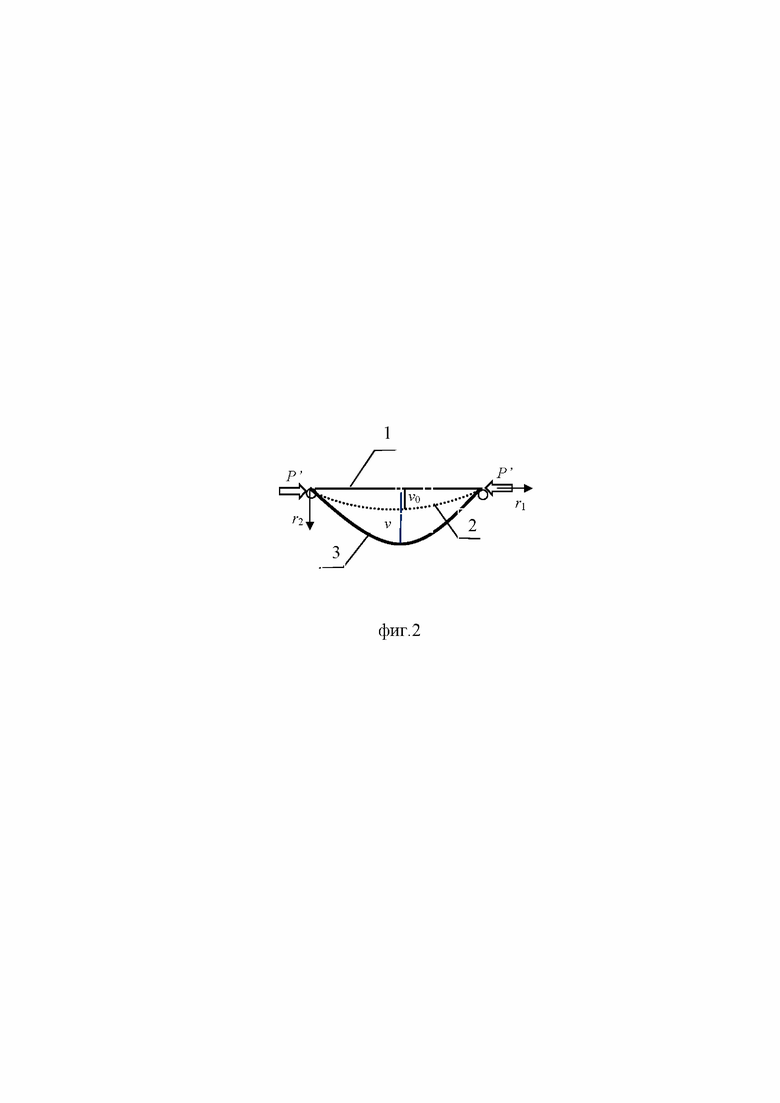
На фиг.1 изображена расчетная схема изгибного деформирования консольно закрепленного биморфа, обусловленного действием управляющего электрического напряжения  на электроды биморфа, где начальное прямолинейнее расположение оси биморфа (график 1), без учета (график 2) и с учетом (график 3) действия продольной сжимающей силы P, результирующие величины компонент перемещения
на электроды биморфа, где начальное прямолинейнее расположение оси биморфа (график 1), без учета (график 2) и с учетом (график 3) действия продольной сжимающей силы P, результирующие величины компонент перемещения  ,
,  (прогиб) по продольной
(прогиб) по продольной  и поперечной
и поперечной  осям и угла поворота θ торца биморфа.
осям и угла поворота θ торца биморфа.
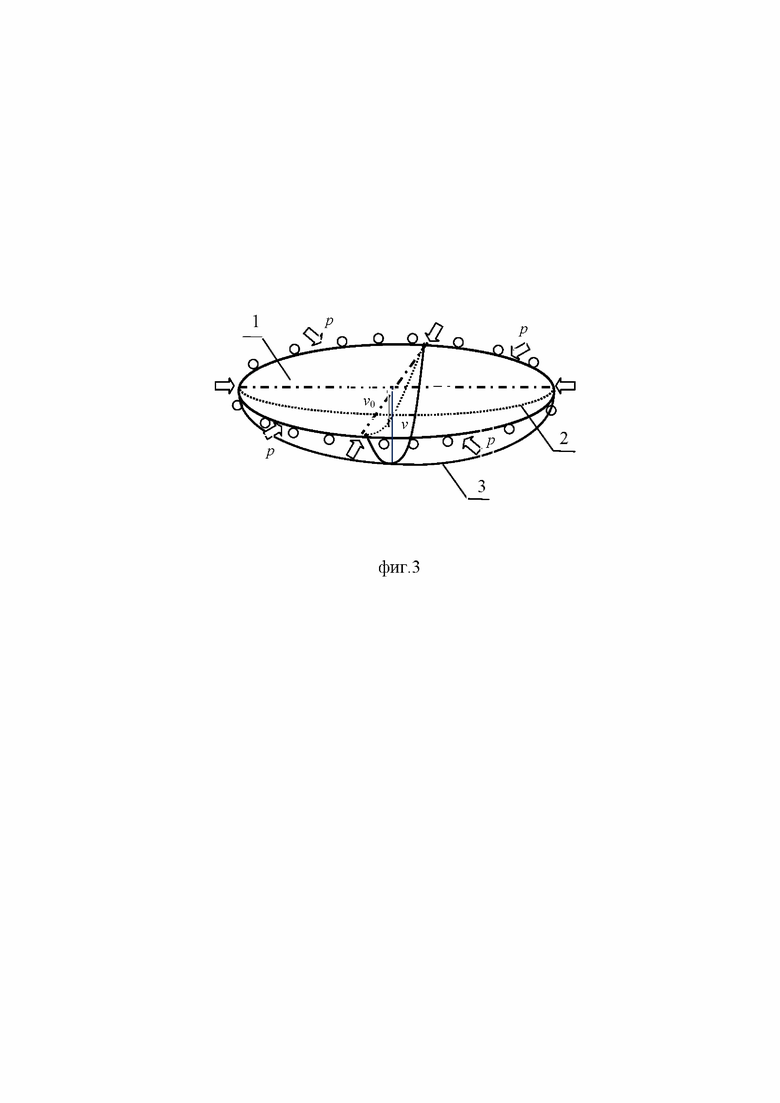
На фиг.2 изображена расчетная схема изгибного деформирования шарнирно закрепленного биморфа, обусловленного действием управляющего электрического напряжения  на электроды биморфа с учетом и без учета действия продольной сжимающей силы P.
на электроды биморфа с учетом и без учета действия продольной сжимающей силы P.
На фиг.3 изображена расчетная схема изгибного деформирования шарнирно закрепленной круглой мембраны биморфа, обусловленного действием управляющего электрического напряжения на электроды биморфа с учетом и без учета действия (в плоскости мембраны) распределенной по внешнему контуру мембраны сжимающей нагрузки (давления) p, где - результирующий прогиб в центре мембраны биморфа с учетом действия давления p.
Считаем, что в исходном (первоначальном) состоянии (фиг.1, 2) нейтральная линия (продольная ось) биморфа расположена, например, на координатной оси  , а взаимопротивоположные направления поляризаций двух пьезоэлектрических слоев биморфа коллинеарны поперечной оси
, а взаимопротивоположные направления поляризаций двух пьезоэлектрических слоев биморфа коллинеарны поперечной оси  . Для мембраны (фиг.3) нейтральный слой биморфа в исходном (первоначальном) состоянии расположен, например, в плоскости
. Для мембраны (фиг.3) нейтральный слой биморфа в исходном (первоначальном) состоянии расположен, например, в плоскости  , а взаимопротивоположные направления поляризаций двух пьезоэлектрических слоев биморфа коллинеарны поперечной оси
, а взаимопротивоположные направления поляризаций двух пьезоэлектрических слоев биморфа коллинеарны поперечной оси  .
.
Способ осуществляется следующим образом.
Изгиб в плоскости  начально сжатого прямолинейного биморфа (фиг.1,2) инициируется действием, в частности, на электроды биморфа управляющего электрического напряжения , при этом направление изгиба (от исходного положения) оси биморфа определяется знаком величины . При приложении к электродам биморфа управляющего электрического напряжения продольная ось биморфа искривляется по дуге с радиусом кривизны
начально сжатого прямолинейного биморфа (фиг.1,2) инициируется действием, в частности, на электроды биморфа управляющего электрического напряжения , при этом направление изгиба (от исходного положения) оси биморфа определяется знаком величины . При приложении к электродам биморфа управляющего электрического напряжения продольная ось биморфа искривляется по дуге с радиусом кривизны  , где
, где  - пьезоэлектрический изгибающий момент вокруг оси
- пьезоэлектрический изгибающий момент вокруг оси  , известные величины:
, известные величины:  - пьезоэлектрический коэффициент пропорциональности,
- пьезоэлектрический коэффициент пропорциональности,  - пьезомодуль материала,
- пьезомодуль материала,  - жесткость поперечного сечения биморфа на изгиб,
- жесткость поперечного сечения биморфа на изгиб,  - продольный модуль Юнга пьезоэлектрика вдоль оси
- продольный модуль Юнга пьезоэлектрика вдоль оси  ,
,  - осевой момент инерции прямоугольного поперечного сечения биморфа относительно оси ,
- осевой момент инерции прямоугольного поперечного сечения биморфа относительно оси ,  - ширина,
- ширина,  - толщина биморфа. Величину угла дуги изогнутой продольной оси биморфа
- толщина биморфа. Величину угла дуги изогнутой продольной оси биморфа  находим через угловой коэффициент пропорциональности
находим через угловой коэффициент пропорциональности  с учетом выражения длины биморфа
с учетом выражения длины биморфа  . Считаем, что величина приложенной к торцу биморфа продольной силы P < P1, где величина силы потери устойчивости по Эйлеру
. Считаем, что величина приложенной к торцу биморфа продольной силы P < P1, где величина силы потери устойчивости по Эйлеру  , в частности, имеем значение μ=2 для консольного (фиг.1) и μ=1 для шарнирного (фиг.2) закрепления торцов биморфа. Поэтому, после «выключения» управляющего электрического напряжения
, в частности, имеем значение μ=2 для консольного (фиг.1) и μ=1 для шарнирного (фиг.2) закрепления торцов биморфа. Поэтому, после «выключения» управляющего электрического напряжения  биморф возвращается из изогнутого в первоначальное прямолинейное состояние, а при смене знака управляющего электрического напряжения
биморф возвращается из изогнутого в первоначальное прямолинейное состояние, а при смене знака управляющего электрического напряжения  (например, при знакопеременном электрическом напряжении
(например, при знакопеременном электрическом напряжении  во времени
во времени  ) контролируемо изменяется «направление» изгиба биморфа в плоскости
) контролируемо изменяется «направление» изгиба биморфа в плоскости  , т.е. изменяется на обратный знак величин
, т.е. изменяется на обратный знак величин  ,
,  (фиг.1) и
(фиг.1) и  (фиг.2, 3).
(фиг.2, 3).
Таким образом, для случая консольного закрепления биморфа (фиг.1) при приложении управляющего электрического напряжения имеем результирующие значения компонентов перемещения  ,
,  , угла поворота
, угла поворота  торца изогнутой консоли
торца изогнутой консоли  ,
,  ,
,  или в виде
или в виде
 ,
,
 ,
,
при действии на торце биморфа продольной силы  .
.
Для случая шарнирного закрепления биморфа (фиг.2) при приложении управляющего электрического напряжения имеем результирующее значение прогиба  в середине биморфа при наличии продольной силы P’ на торце биморфа, где начальная пьезоэлектрическая величина прогиба
в середине биморфа при наличии продольной силы P’ на торце биморфа, где начальная пьезоэлектрическая величина прогиба  с учетом
с учетом  и поправка
и поправка  , обусловленная действием на торец биморфа продольной силы P’ < P’1.
, обусловленная действием на торец биморфа продольной силы P’ < P’1.
Таблица
Результирующие «коэффициенты усиления» консоли биморфа



В таблице даны численные значения результирующих «коэффициентов усиления» консоли биморфа  ,
,  для различных относительных значений силы
для различных относительных значений силы  , где
, где  ,
,  - соответствующие значения перемещения и угла поворота торцевого сечения при P = 0, константы
- соответствующие значения перемещения и угла поворота торцевого сечения при P = 0, константы  ,
,  - характеристики биморфа. Для рассматриваемого случая имеем значения констант
- характеристики биморфа. Для рассматриваемого случая имеем значения констант  = 0.0154 1/Н, = 0.0123 1/Н, значение продольной силы потери устойчивости P1 = 66.62 Н.
= 0.0154 1/Н, = 0.0123 1/Н, значение продольной силы потери устойчивости P1 = 66.62 Н.
Для шарнирно закрепленного биморфа (фиг.2) имеем значения  = 1.21, 1,62, 1,82 результирующего «коэффициента усиления» биморфа
= 1.21, 1,62, 1,82 результирующего «коэффициента усиления» биморфа  при относительной величине силы
при относительной величине силы  = 0.2, 0.6, 0.8 соответственно, константа
= 0.2, 0.6, 0.8 соответственно, константа  = 0.00385 1/Н, значение продольной силы потери устойчивости P’1 = 266.48 Н.
= 0.00385 1/Н, значение продольной силы потери устойчивости P’1 = 266.48 Н.
Таким образом, предложенное техническое решение позволяет значительно увеличить пьезочувствительность биморфа изгибного типа с увеличением диапазона допустимых значений изгибных деформаций (прогибов) в режиме пьезоэлектрического актюатора и с увеличением информативного электрического напряжения  и электрического заряда
и электрического заряда  на электродах биморфа в режиме гибкого датчика для случая квазистатического или динамического (циклического) внешнего воздействия.
на электродах биморфа в режиме гибкого датчика для случая квазистатического или динамического (циклического) внешнего воздействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ БИМОРФ ИЗГИБНОГО ТИПА | 2022 |
|
RU2793564C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2822976C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2023 |
|
RU2819557C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2839714C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2016 |
|
RU2636255C2 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2019 |
|
RU2723567C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2024 |
|
RU2821960C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2024 |
|
RU2821961C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2024 |
|
RU2833103C1 |
Изобретение относится к способу увеличения пьезочувствительности биморфа изгибного типа. Для увеличения пьезочувствительности используют биморф изгибного типа в двух режимах, а именно: в режиме гибкого пьезоактюатора и в режиме генератора как гибкий пьезодатчик. В режиме пьезоактюатора прилагают управляющее электромагнитное воздействие к биморфу с целью механического воздействия биморфа на внешние объекты. В режиме пьезодатчика осуществляют измерение значений возникающего информативного электромагнитного сигнала биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа определенным образом. Обеспечивается увеличение пьезочувствительности биморфа в режиме пьезоактуатора и увеличение значений возникающего информативного сигнала в режиме пьезодатчика для случая квазистатического или динамического (циклического) внешнего воздействия. 2 з.п. ф-лы, 3 ил., 1 табл.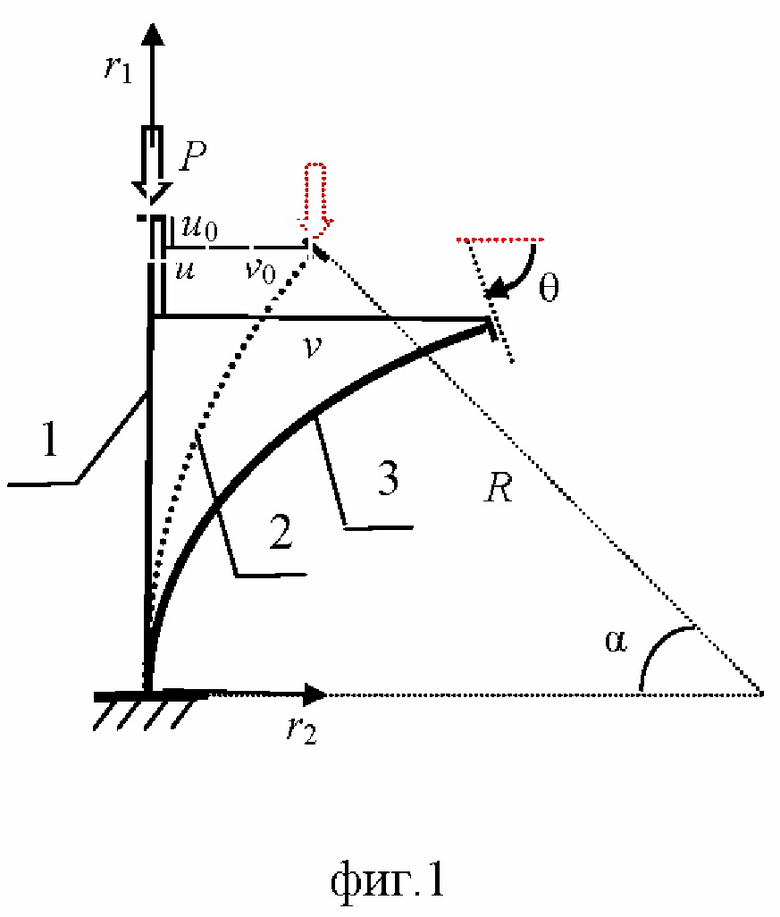
1. Способ увеличения пьезочувствительности биморфа изгибного типа, при котором используют биморф изгибного типа для работы в двух режимах: в режиме гибкого пьезоактюатора и в режиме генератора как гибкий пьезодатчик, осуществляют начальное сжатие биморфа, осуществляют в режиме пьезоактюатора приложение управляющего электромагнитного воздействия к биморфу с целью механического воздействия биморфа на внешние объекты или осуществляют в режиме пьезодатчика измерение значений возникающего информативного электромагнитного сигнала биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа, отличающийся тем, что используют непосредственное начальное сжатие биморфа вдоль нейтральной линии биморфа стержневого типа приложенной продольной силой P на торцах стержня или начальное сжатие биморфа в плоскости нейтрального слоя биморфа мембранного типа приложенным давлением p по внешнему контуру мембраны, при этом величина силы P < P1 или давления p < p1 начального сжатия меньше значения силы P1 или давления p1 потери устойчивости биморфа с учетом его геометрических, физико-механических характеристик и способа закрепления.
2. Способ по п. 1, отличающийся тем, что используют пьезоэлектрический биморф изгибного типа для работы в двух режимах: в режиме гибкого пьезоэлектрического актюатора и в режиме генератора как гибкий пьезоэлектрический датчик, при этом осуществляют в режиме пьезоэлектрического актюатора приложение управляющего электрического напряжения  к электродам биморфа с целью механического воздействия биморфа на внешние объекты или осуществляют в режиме гибкого датчика измерение значений информативного электрического напряжения
к электродам биморфа с целью механического воздействия биморфа на внешние объекты или осуществляют в режиме гибкого датчика измерение значений информативного электрического напряжения  или электрического заряда
или электрического заряда  на электродах биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа.
на электродах биморфа с целью измерения величины внешнего силового воздействия на поверхность биморфа.
3. Способ по п. 1, отличающийся тем, что используют магнитострикционный биморф изгибного типа для работы в режиме гибкого пьезоэлектрического актюатора, при этом осуществляют приложение управляющего магнитного поля к биморфу.
| Способ ацилирования ароматических аминов | 1959 |
|
SU127251A1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2016 |
|
RU2636255C2 |
| WO 2009007047 A2, 15.01.2009 | |||
| US 7355325 B2, 08.04.2008. | |||

