Перекрестная ссылка на родственные заявки
Настоящая заявка испрашивает преимущество по предварительной заявке США № 62/315 262, поданной 30 марта 2016 г., и предварительной заявке США № 62/366 152, поданной 25 июля 2016 г., содержание которых полностью включено в настоящий документ путем ссылки.
Предпосылки создания изобретения
Системы автомобиль-автомобиль (V2V), автомобиль-инфраструктура (V2I) и автомобиль-пешеход (V2P) (вместе именуемые автомобиль-все (V2X)) — это автомобильные системы связи, в которых автомобили и придорожные элементы являются узлами связи в сети связи. Эти узлы предоставляют друг другу информацию, такую как предупреждения о безопасности и информация о движении. В рамках кооперативного подхода автомобильные системы связи могут быть более эффективными для предотвращения ДТП и заторов на дорогах, чем в случае, когда каждый водитель автомобиля пытается решать проблемы самостоятельно.
Начата поддержка прямой связи между устройствами (устройство-устройство) (D2D) ведущими организациями по стандартизации, такими как Институт инженеров по электротехнике и электронике (IEEE) или Проект партнерства третьего поколения (3GPP). В случае 3GPP и радиодоступа на основе стандарта долгосрочного развития (LTE) в настоящее время внедряют поддержку связи D2D для создания экономичных и высокопроизводительных систем связи для обеспечения общественной безопасности с помощью технологии LTE. Во-первых, это связано с желанием гармонизировать технологию радиодоступа в разных юрисдикциях с целью снижения капитальных затрат (CAPEX) и эксплуатационных расходов (OPEX) технологии радиодоступа, доступной для использования приложений, связанных общественной безопасностью (PS). Во-вторых, это связано с тем, что LTE в качестве масштабируемого широкополосного радио решения позволяет эффективно мультиплексировать различные типы сервисов, такие как передача речи и видео.
Поскольку приложениям PS обычно требуется радиосвязь в областях, которые зачастую не находятся в зоне радиопокрытия сети LTE, например, в туннелях, глубоких подвалах или после катастрофических сбоев в работе систем, необходимо поддерживать связь D2D для PS при отсутствии какой-либо работающей сети или до прибытия специальной развернутой инфраструктуры радиосвязи. Однако даже в условиях наличия работающей инфраструктуры сети PS-связь обычно может требовать более высокой надежности, чем коммерческие сервисы.
Стандарты и технологии связи V2X могут быть разработаны на основе текущих спецификаций D2D LTE в дополнение к потенциальным усовершенствованиям LTE как в D2D, так и не в D2D для удовлетворения требований подгруппы сервисов к группе технических спецификаций 3GPP по аспектам сервисов и систем (SA1).
Изложение сущности изобретения
Способы, устройства и системы предусмотрены для согласования генерации и передачи кооперативных информационных сообщений (CAM) с синхронизацией ресурсов с полунепрерывным планированием (SPS) на основе конфигурации SPS, включая передачу на Node-B указания об изменении конфигурации SPS на основе инициирующего события, причем указание об изменении конфигурации SPS включает в себя запрос на изменение по меньшей мере одного из параметров, включающих интервал планирования и смещение текущей конфигурации SPS, реконфигурацию текущей конфигурации SPS на основе указания об изменении конфигурации SPS и передачу CAM с использованием ресурсов SPS в соответствии с измененной конфигурацией SPS.
Способ работы модуля беспроводной передачи/приема (WTRU) может включать передачу от WTRU на расширенный узел B (eNB) запроса ресурсов полунепрерывного планирования (SPS), включая периодичность запрашиваемых ресурсов SPS и временное смещение, указывающее время, в течение которого WTRU ожидает наличия выделенного ресурса SPS. Способ может дополнительно включать в себя прием модулем WTRU конфигурации SPS от eNB в ответ на передаваемый запрос ресурсов SPS. Временное смещение передаваемого запроса может включать смещение номера подкадра (SFN) относительно SFN 0 модуля WTRU. Принятая конфигурация SPS может соответствовать интерфейсу PC5. Конфигурация SPS может быть принята по физическому каналу управления нисходящей линии связи (PDCCH).
Краткое описание графических материалов
Более подробное объяснение содержится в представленном ниже описании, приведенном в качестве примера, в сочетании с прилагаемыми чертежами, на которых:
фиг. 1A представляет собой системную схему примера системы связи, в которой могут быть реализованы один или более описанных вариантов осуществления;
фиг. 1B представляет собой системную схему примера модуля беспроводной передачи/приема (WTRU), который может быть применен в рамках системы связи, изображенной на фиг. 1A;
фиг. 1C представляет собой системную схему примера сети радиодоступа и примера базовой сети, которые могут быть применены в рамках системы связи, изображенной на фиг. 1A;
фиг. 2 представляет собой схему примера временной шкалы синхронизации CAM;
фиг. 3A представляет собой схему примера 4-битового индикатора значения интервала, используемого для сигнализации одного из 10 или более желаемых предварительно сконфигурированных интервалов SPS;
фиг. 3B представляет собой пример конструкции элемента управления (CE) MAC, содержащей значение индикатора интервала и номер кадра в системе (SFN);
фиг. 4 представляет собой пример PDU MAC, содержащего множество CE MAC;
фиг. 5 представляет собой схему примера процедуры запрошенного смещения или изменения смещения; и
фиг. 6 представляет собой схему примера процедуры указания об изменении конфигурации SPS;
фиг. 7 представляет собой блок-схему, иллюстрирующую способ сокращенной реконфигурации SPS с использованием сообщения подтверждения; и
на фиг. 8 приведен список примеров инициирующих событий для реконфигурации SPS.
Подробное описание
Фиг. 1A представляет собой схему примера системы 100 связи, в которой может быть реализован один или более описанных вариантов осуществления. Система 100 связи может быть системой коллективного доступа, которая предоставляет содержимое, такое как голосовая информация, данные, видео, сообщения, широковещание и т.п., для множества пользователей беспроводной связи. Система 100 связи может позволять множеству пользователей беспроводной связи получать доступ к такому содержимому путем совместного использования системных ресурсов, включая ширину полосы пропускания беспроводного соединения. Например, в системе 100 может быть использован один или более способов доступа к каналу, таких как множественный доступ с кодовым разделением каналов (CDMA), множественный доступ с временным разделением каналов (TDMA), множественный доступ с частотным разделением каналов (FDMA), множественный доступ с ортогональным частотным разделением каналов (OFDMA), множественный доступ с частотным разделением каналов и передачей на одной несущей (SC-FDMA) и т.п.
Как показано на фиг. 1A, система 100 связи может включать в себя модули беспроводной передачи/приема (WTRU) 102a, 102b, 102c, 102d, сеть 104 радиодоступа (RAN), базовую сеть 106, коммутируемую телефонную сеть 108 общего пользования (PSTN), сеть 110 Интернет и другие сети 112, хотя следует понимать, что описанные варианты осуществления предполагают любое число WTRU, базовых станций, сетей и/или сетевых элементов. Каждый из WTRU 102a, 102b, 102c, 102d может быть устройством любого типа, выполненным с возможностью работы и/или связи в среде беспроводной связи. В качестве примера WTRU 102a, 102b, 102c, 102d могут быть выполнены с возможностью передачи и/или приема радиосигналов и могут включать в себя оборудование пользователя (UE), мобильную станцию либо фиксированный или мобильный абонентский блок, пейджер, сотовый телефон, карманный компьютер (PDA), смартфон, портативный персональный компьютер, нетбук, персональный компьютер, беспроводный датчик, бытовую электронику и т.п.
Системы 100 связи также могут включать базовую станцию 114a и базовую станцию 114b. Каждая из базовых станций 114a, 114b может быть устройством любого типа, выполненным с возможностью беспроводного взаимодействия по меньшей мере с одним из WTRU 102a, 102b, 102c, 102d для облегчения доступа к одной или более сетям связи, таким как базовая сеть 106, сеть 110 Интернет и/или другие сети 112. В качестве примера базовые станции 114a, 114b могут представлять собой базовую приемопередающую станцию (BTS), станцию Node-B, станцию eNode B, станцию Home Node B, станцию Home eNode B, контроллер пункта связи, точку доступа (AP), беспроводной маршрутизатор и т.п. Несмотря на то что базовые станции 114a, 114b показаны как отдельный элемент, следует понимать, что базовые станции 114a, 114b могут включать в себя любое число взаимно соединенных базовых станций и/или сетевых элементов.
Базовая станция 114a может являться частью RAN 104, которая может также включать другие базовые станции и/или сетевые элементы (не показаны), такие как контроллер базовой станции (BSC), контроллер радиосети (RNC), ретрансляционные узлы и т.п. Базовая станция 114a и/или базовая станция 114b может быть выполнена с возможностью передачи и/или приема радиосигналов в пределах определенного географического региона, который могут именовать сотой (не показана). Соту могут дополнительно разделять на сектора. Например, соту, связанную с базовой станцией 114a, могут разделить на три сектора. Таким образом, в одном варианте осуществления базовая станция 114a может включать три приемопередатчика, т.е. один для каждого сектора соты. В другом варианте осуществления базовая станция 114a может использовать технологию многоканального входа — многоканального выхода (MIMO) и, следовательно, может использовать множество приемопередатчиков для каждого сектора соты.
Базовые станции 114a, 114b могут обмениваться данными с одним или более из WTRU 102a, 102b, 102c, 102d по радиоинтерфейсу 116, который может являться любой подходящей беспроводной линией связи (например, для передачи сигналов в радиочастотном (РЧ) спектре, в микроволновом спектре, инфракрасном (ИК) спектре, ультрафиолетовом (УФ) спектре, спектре видимого света и т.д.). Радиоинтерфейс 116 может быть установлен с использованием любой подходящей технологии радиодоступа (RAT).
Более конкретно, как указано выше, система 100 связи может являться системой коллективного доступа и может использовать одну или более схем доступа к каналу, таких как CDMA, TDMA, FDMA, OFDMA, SC-FDMA и т.п. Например, базовая станция 114a в RAN 104 и WTRU 102a, 102b, 102c могут реализовывать технологию радиосвязи, такую как универсальный наземный доступ (UTRA) для универсальной мобильной телекоммуникационной системы (UMTS), которая может устанавливать радиоинтерфейс 116 с использованием широкополосного CDMA (WCDMA). Технология WCDMA может включать протоколы связи, такие как высокоскоростной пакетный доступ (HSPA) и/или развитый HSPA (HSPA+). Протокол HSPA может включать высокоскоростной пакетный доступ по нисходящей линии связи (HSDPA) и/или высокоскоростной пакетный доступ по восходящей линии связи (HSUPA).
В другом варианте осуществления базовая станция 114a и WTRU 102a, 102b, 102c могут реализовывать технологию радиосвязи, такую как расширенный универсальный наземный радиодоступ в систему UMTS (E-UTRA), которая может устанавливать радиоинтерфейс 116 с использованием стандарта долгосрочного развития (LTE) и/или стандарта LTE-Advanced (LTE-A).
В других вариантах осуществления базовая станция 114a и WTRU 102a, 102b, 102c могут реализовывать технологии радиосвязи, такие как IEEE 802.16 (т.е. глобальная совместимость для микроволнового доступа (WiMAX)), CDMA2000, CDMA2000 1X, CDMA2000 EV-DO, временный стандарт 2000 (IS-2000), временный стандарт 95 (IS-95), временный стандарт 856 (IS-856), глобальная система мобильной связи (GSM), усовершенствованные скорости передачи данных для сетей GSM Evolution (EDGE), GSM EDGE (GERAN) и т.п.
Базовая станция 114b, показанная на фиг. 1A, может быть, например, беспроводным маршрутизатором, станцией Home Node B, станцией Home eNode B или точкой доступа, и она может использовать любую подходящую RAT для упрощения подключаемости беспроводной связи в локализованной области, такой как предприятие, жилое помещение, автомобиль, территория учебного заведения и т.п. В одном варианте осуществления базовая станция 114b и модули WTRU 102c, 102d могут реализовывать технологию радиосвязи, такую как IEEE 802.11, для организации беспроводной локальной сети (WLAN). В другом варианте осуществления базовая станция 114b и модули WTRU 102c, 102d могут реализовывать технологию радиосвязи, такую как IEEE 802.15, для организации персональной беспроводной сети (WPAN). В еще одном варианте осуществления базовая станция 114b и WTRU 102c, 102d могут использовать RAT на основе сот (например, WCDMA, CDMA2000, GSM, LTE, LTE-A и т.д.) для организации пикосоты или фемтосоты. Как показано на фиг. 1A, базовая станция 114b может иметь прямое соединение с сетью 110 Интернет. Таким образом, базовая станция 114b может не требовать доступа к сети 110 Интернет посредством базовой сети 106.
RAN 104 может обмениваться данными с базовой сетью 106, которая может быть сетью любого типа, выполненной с возможностью предоставления услуг передачи голосовой информации, данных, приложений и/или голосовой связи по протоколу (VoIP) Интернета одному или более из WTRU 102a, 102b, 102c, 102d. Например, базовая сеть 106 может обеспечивать управление вызовами, услуги биллинга, услуги мобильной связи на основе местоположения, предварительно оплаченные вызовы, возможность связи с сетью Интернет, распределение видеосигналов и т.п. и/или реализовывать функции высокоуровневой защиты, такие как аутентификация пользователей. Несмотря на то что на фиг. 1A это не показано, следует понимать, что RAN 104 и/или базовая сеть 106 могут прямо или косвенно обмениваться данными с другими RAN, которые используют такую же RAT, что и RAN 104, или другую RAT. Например, в дополнение к соединению с RAN 104, которая может использовать технологию радиосвязи Е-UTRA, базовая сеть 106 также может обмениваться данными с другой RAN (не показана) с использованием технологии радиосвязи GSM.
Базовая сеть 106 также может служить в качестве шлюза для WTRU 102a, 102b, 102c, 102d для обеспечения доступа к сети PSTN 108, сети 110 Интернет и/или другим сетям 112. Сеть PSTN 108 может включать в себя сети телефонной связи с коммутацией каналов, которые предоставляют традиционные услуги телефонной связи (POTS). Сеть 110 Интернет может включать глобальную систему взаимно соединенных компьютерных сетей и устройств, которые используют стандартные протоколы связи, такие как протокол управления передачей данных (TCP), протокол пользовательских дейтаграмм (UDP) и протокол Интернета (IP) в наборе протоколов Интернета TCP/IP. Сети 112 могут включать в себя проводные или беспроводные сети связи, которые принадлежат и/или обслуживают другие сервис-провайдеры. Например, сети 112 могут включать в себя другую базовую сеть, соединенную с одной или более RAN, которые могут использовать такую же RAT, что и RAN 104, или другую RAT.
Некоторые или все из WTRU 102a, 102b, 102c, 102d в системе 100 связи могут включать в себя многорежимные возможности, т.е. WTRU 102a, 102b, 102c, 102d могут включать в себя множество приемопередатчиков для связи с различными беспроводными сетями по различным беспроводным линиям связи. Например, модуль WTRU 102c, показанный на фиг. 1A, может быть выполнен с возможностью обмена данными с базовой станцией 114a, которая может использовать технологию радиосвязи на основе сот, и с базовой станцией 114b, которая может использовать технологию радиосвязи IEEE 802.
Фиг. 1B представляет собой системную схему примера WTRU 102. Как показано на фиг. 1B, модуль WTRU 102 может включать в себя процессор 118, приемопередатчик 120, передающий/приемный элемент 122, динамик/микрофон 124, клавиатуру 126, дисплей/сенсорную панель 128, несъемное запоминающее устройство 130, съемное запоминающее устройство 132, источник 134 питания, набор 136 микросхем глобальной системы определения местоположения (GPS) и другие периферийные устройства 138. Следует понимать, что модуль WTRU 102 может включать в себя любую субкомбинацию вышеперечисленных элементов и в то же время соответствовать варианту осуществления.
Процессор 118 может представлять собой процессор общего назначения, процессор специального назначения, стандартный процессор, цифровой сигнальный процессор (DSP), множество микропроцессоров, один или более микропроцессоров, связанных с ядром процессора DSP, контроллер, микроконтроллер, специализированные интегральные микросхемы (ASIC), схемы программируемой пользователем вентильной матрицы (FPGA), интегральную схему (IC) любого другого типа, конечный автомат и т.п. Процессор 118 может выполнять кодирование сигналов, обработку данных, управление питанием, обработку ввода/вывода и/или любую другую функцию, которая позволяет модулю WTRU 102 работать в среде беспроводной связи. Процессор 118 может быть сопряжен с приемопередатчиком 120, который может быть сопряжен с передающим/приемным элементом 122. Несмотря на то, что на фиг. 1B процессор 118 и приемопередатчик 120 показаны в виде отдельных компонентов, следует понимать, что процессор 118 и приемопередатчик 120 могут быть совместно встроены в электронный блок или микросхему.
Передающий/приемный элемент 122 может быть выполнен с возможностью передачи сигналов на или приема сигналов от базовой станции (например, базовой станции 114a) по радиоинтерфейсу 116. Например, в одном варианте осуществления передающий/приемный элемент 122 может быть антенной, выполненной с возможностью передачи и/или приема РЧ-сигналов. В другом варианте осуществления передающий/приемный элемент 122 может быть излучателем/детектором, выполненным с возможностью передачи и/или приема, например, сигналов в ИК-спектре, УФ-спектре или спектре видимого света. В еще одном варианте осуществления передающий/приемный элемент 122 может быть выполнен с возможностью передачи и приема сигналов как в РЧ-спектре, так и в спектре видимого света. Следует понимать, что передающий/приемный элемент 122 может быть выполнен с возможностью передачи и/или приема любой комбинации радиосигналов.
Кроме того, несмотря на то, что на фиг. 1B передающий/приемный элемент 122 показан как отдельный элемент, модуль WTRU 102 может включать в себя любое число передающих/приемных элементов 122. Более конкретно, модуль WTRU 102 может использовать технологию MIMO. Таким образом, в одном варианте осуществления WTRU 102 может включать в себя два или более передающих/приемных элемента 122 (например, множество антенн) для передачи и приема радиосигналов по радиоинтерфейсу 116.
Приемопередатчик 120 может быть выполнен с возможностью модуляции сигналов, которые должны быть переданы передающим/приемным элементом 122, и демодуляции сигналов, которые принимает передающий/приемный элемент 122. Как указано выше, модуль WTRU 102 может иметь многорежимные возможности. Таким образом, приемопередатчик 120 может включать в себя множество приемопередатчиков для предоставления модулю WTRU 102 возможности связи посредством множества технологий RAT, таких как, например, UTRA и IEEE 802.11.
Процессор 118 WTRU 102 может быть сопряжен и может принимать данные, вводимые пользователем через динамик/микрофон 124, клавиатуру 126 и/или дисплей/сенсорную панель 128 (например, жидкокристаллический дисплей (LCD) или дисплей на органических светодиодах (OLED). Процессор 118 также может выводить пользовательские данные на динамик/микрофон 124, клавиатуру 126 и/или дисплей/сенсорную панель 128. Кроме того, процессор 118 может осуществлять доступ к информации и сохранять данные в подходящем запоминающем устройстве любого типа, таком как несъемное запоминающее устройство 130 и/или съемное запоминающее устройство 132. Несъемное запоминающее устройство 130 может включать оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий диск или запоминающее устройство любого другого типа. Съемное запоминающее устройство 132 может включать карту модуля идентификации абонента (SIM), карту памяти, безопасную цифровую (SD) карту памяти и т.п. В других вариантах осуществления процессор 118 может осуществлять доступ к информации и сохранять данные в памяти, которая физически не размещена в модуле WTRU 102, как например, на сервере или домашнем компьютере (не показано).
Процессор 118 может получать питание от источника 134 питания и может быть выполнен с возможностью управления питанием и/или распределения питания на другие компоненты в модуле WTRU 102. Источник 134 питания может быть любым подходящим устройством для подачи питания на модуль WTRU 102. Например, источник питания 134 может включать в себя одну или более сухих батарей (например, никель-кадмиевых (NiCd), никель-цинковых (NiZn), гибридных никелевых (NiMH), литий-ионных (Li-ion) и т.д.), солнечных элементов, топливных элементов и т.п.
Процессор 118 также может быть сопряжен с набором микросхем GPS 136, который может быть выполнен с возможностью предоставления информации о местоположении (например, долготы и широты) относительно текущего местоположения WTRU 102. В дополнение или вместо информации от набора микросхем GPS 136 модуль WTRU 102 может принимать информацию о местоположении по радиоинтерфейсу 116 от базовой станции (например, от базовых станций 114a, 114b) и/или определять свое местоположение на основе синхронизации сигналов, принимаемых от двух или более соседних базовых станций. Следует понимать, что модуль WTRU 102 может получать информацию о местоположении посредством любого подходящего способа определения местоположения и в то же время соответствовать варианту осуществления.
Процессор 118 может быть дополнительно сопряжен с другими периферийными устройствами 138, которые могут включать один или более программных и/или аппаратных модулей, которые обеспечивают дополнительные возможности, функции и/или возможности по установлению проводной или беспроводной связи. Например, периферийные устройства 138 могут включать в себя акселерометр, электронный компас, спутниковый приемопередатчик, цифровую камеру (для фото- и видеосъемки), порт универсальной последовательной шины (USB), вибрационное устройство, телевизионный приемопередатчик, гарнитуру связи типа hands free, модуль Bluetooth®, модуль радиовещания с частотной модуляцией (FM), цифровой музыкальный проигрыватель, мультимедийный проигрыватель, модуль воспроизводящего устройства для видеоигр, Интернет-браузер и т.п.
Фиг. 1C представляет собой системную схему RAN 104 и базовой сети 106 в соответствии с одним вариантом осуществления. Как отмечено выше, RAN 104 может использовать технологию радиосвязи E-UTRA для связи с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. Сеть RAN 104 также может обмениваться данными с базовой сетью 106.
RAN 104 может включать в себя базовые станции eNode-B 140a, 140b, 140c, хотя следует понимать, что RAN 104 может включать в себя любое количество базовых станций eNode-B, оставаясь соответствующей варианту осуществления. Каждая базовая станция eNode-B 140a, 140b, 140c может включать в себя один или более приемопередатчиков для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. В одном варианте осуществления станции eNode B 140a, 140b, 140c могут реализовывать технологию MIMO. Таким образом, например, станция eNode B 140a может использовать множество антенн для передачи радиосигналов на модуль WTRU 102a и приема радиосигналов от него.
Каждая из станций eNode B 140a, 140b, 140c может быть связана с конкретной сотой (не показана) и может быть выполнена с возможностью обработки решений, связанных с управлением ресурсами радиосвязи, решений, связанных с передачей обслуживания, планирования пользователей в восходящей линии связи и/или нисходящей линии связи и т.п. Как показано на фиг. 1C, базовые станции eNode-Bs 140a, 140b, 140c могут обмениваться данными друг с другом по интерфейсу X2.
Базовая сеть 106, показанная на фиг. 1C, может включать в себя узел 142 управления мобильностью (MME), обслуживающий шлюз 144 и шлюз 146 сети с пакетной передачей данных (PDN). Несмотря на то, что каждый из вышеперечисленных элементов показан как часть базовой сети 106, следует понимать, что любой из этих элементов может принадлежать и/или его может обслуживать субъект, отличный от оператора базовой сети.
MME 142 может быть подключен к каждой базовой станции eNode-Bs 140a, 140b, 140c в RAN 104 по интерфейсу S1 и может служить в качестве узла управления. Например, MME 142 может отвечать за аутентификацию пользователей WTRU 102a, 102b, 102c, активацию/деактивацию однонаправленных каналов, выбор конкретного обслуживающего шлюза во время начального подсоединения боков WTRU 102a, 102b, 102c и т.п. Узел MME 142 также может обеспечивать функцию панели управления для коммутации между сетью RAN 104 и другими сетями RAN (не показаны), которые используют другие технологии радиосвязи, например, GSM или WCDMA.
Обслуживающий шлюз 144 может быть подключен к каждой станции eNode B 140a, 140b, 140c в RAN 104 посредством интерфейса S1. Обслуживающий шлюз 144 может по существу направлять и пересылать пакеты данных пользователя на WTRU 102a, 102b, 102c и от них. Обслуживающий шлюз 144 может также выполнять другие функции, такие как привязка плоскостей пользователя во время передачи обслуживания между станциями eNode B, инициирование пейджинга, когда данные в нисходящей линии связи доступны для WTRU 102a, 102b, 102c, управление и хранение контекста WTRU 102a, 102b, 102c и т.п.
Обслуживающий шлюз 144 может быть также подключен к PDN-шлюзу 146, который может предоставлять WTRU 102a, 102b, 102c доступ к сетям с коммутацией пакетов, таким как сеть 110 Интернет, для облегчения связи между WTRU 102a, 102b, 102c и устройствами с поддержкой протокола IP.
Базовая сеть 106 может облегчать связь с другими сетями. Например, базовая сеть 106 может предоставлять WTRU 102a, 102b, 102c доступ к сетям с коммутацией каналов, таким как PSTN 108, для облегчения связи между WTRU 102a, 102b, 102c и традиционными устройствами связи наземной линии связи. Например, базовая сеть 106 может включать в себя или может обмениваться данными с IP-шлюзом (например, сервером мультимедийной IP-подсистемы (IMS), который служит в качестве интерфейса между базовой сетью 106 и сетью PSTN 108. Кроме того, базовая сеть 106 может предоставлять WTRU 102a, 102b, 102c доступ к сетям 112, которые могут включать в себя другие проводные или беспроводные сети связи, которые принадлежат и/или обслуживают другие сервис-провайдеры.
Другая сеть 112 может быть дополнительно подключена к беспроводной локальной сети 160 на основе IEEE 802.11 (WLAN). WLAN 160 может включать в себя маршрутизатор 165 доступа. Маршрутизатор доступа может включать функции шлюза. Маршрутизатор 165 доступа может обмениваться данными со множеством точек 170a, 170b доступа (AP). Связь между маршрутизатором 165 доступа и точками 170a, 170b доступа может осуществляться посредством протокола проводной связи Ethernet (стандарты IEEE 802.3) или протокола беспроводной связи любого типа. AP 170a находится в беспроводной связи с WTRU 102d по радиоинтерфейсу.
Системы автомобиль-автомобиль (V2V), автомобиль-инфраструктура (V2I) и автомобиль-пешеход (V2P) (вместе именуемые автомобиль-все (V2X)) — это автомобильные системы связи, в которых автомобили и придорожные элементы являются узлами в сети связи, предоставляя друг другу информацию, такую как предупреждения о безопасности и информация о движении. В рамках кооперативного подхода автомобильные системы связи могут быть более эффективными для предотвращения ДТП и заторов на дорогах, чем в случае, когда каждый водитель автомобиля пытается решать проблемы самостоятельно.
Обычно считают, что автомобильные сети содержат два типа узлов: автомобили и придорожные станции. Оба являются выделенными устройствами ближней связи (DSRC). DSRC обычно работает в полосе 5,9 ГГц с полосой пропускания 75 МГц и приблизительным диапазоном действия около 1000 метров.
Стандарт автомобильной связи, включая V2V, V2I и V2P, может быть разработан путем адаптации текущих спецификаций LTE. Например, можно рассматривать связь V2V с использованием существующей структуры устройство-устройство (D2D), например, ProSe.
Требования к связи V2X были разработаны в 3GPP SA1. В частности, эти требования предписывают передачу коротких сообщений порядка от 50 до нескольких сотен байт с высокой надежностью на уровне AS (например, до 90%) и с низкой задержкой, например, всего 100 мс, для поддержки специфических вариантов использования, таких как предупреждение о лобовом столкновении, предупреждение о потере управления и аварийная остановка.
Связь D2D разрабатывают для связи, относящейся к общественной безопасности (PS), с использованием технологии LTE. Поскольку приложениям PS обычно требуется радиосвязь в областях, которые зачастую не находятся в зоне радиопокрытия сети LTE, например, в туннелях, глубоких подвалах или после катастрофических сбоев в работе систем, необходимо поддерживать связь D2D для PS при отсутствии какой-либо работающей сети или до прибытия специальной развернутой инфраструктуры радиосвязи. Однако даже в условиях наличия работающего оборудования инфраструктуры сети, PS-связь обычно может требовать более высокой надежности, чем коммерческие сервисы.
Приложения типа PS, например, между специалистами оперативного реагирования, могут включать по меньшей мере сервисы прямой полудуплексной голосовой связи с использованием множества разговорных групп. Кроме того, для эффективного использования возможностей, предоставляемых широкополосной радиосвязью LTE, приложения типа PS могут включать такие сервисы, как push-передача или загрузка видео.
Ожидают, что после развертывания связь D2D может быть доступна не только для приложений типа PS, но и для коммерческих вариантов использования. Одним из примеров могут служить коммунальные предприятия, которые также часто нуждаются в поддержке двухсторонней радиосвязи в зонах, не охваченных инфраструктурой сети. Кроме того, сервисы D2D, такие как обнаружение, могут быть подходящими механизмами сигнализации, позволяющими близко расположенным службам и средствам снижения интенсивности дорожного движения использовать радиодоступ на основе LTE в коммерческих вариантах использования.
Связь D2D с использованием радиодоступа на основе LTE может быть выполнена с возможностью работы в режиме управления сетью и в автономном режиме WTRU, именуемых в дальнейшем как режим 1 и режим 2 соответственно. Режим 1 (т.е. управления сетью) может быть возможным только при определенных условиях, например, если терминал D2D находится в радиусе действия базовой станции LTE. Терминал D2D может возвращаться в режим 2 (т.е. автономный WTRU) в случае, если WTRU не может связываться с базовой станцией LTE. В этом случае он будет в основном использовать параметры доступа к каналу, предварительно сохраненные в самом терминале.
Для связи D2D с использованием режима 1 базовая станция LTE может резервировать выбранный набор подкадров восходящей линии связи (UL), чтобы обеспечивать передачу D2D. Базовая станция LTE также может объявлять набор подкадров UL со связанными параметрами, в котором может быть принята связь D2D для соседних сот или терминалов режима 2. Не всегда вся ширина полосы пропускания (BW) системы LTE может быть доступна для связи D2D в подкадре, зарезервированном для D2D. При работе в режиме 1 радиоресурсы для связи D2D могут быть предоставлены обслуживающей сотой терминалу D2D. Предоставлению D2D от сети может предшествовать передача UL терминалом в сотовом канале UL, указывающая базовой станции количество доступных данных D2D. Предоставление D2D, принятое терминалом D2D от базовой станции LTE в сотовом канале DL, позволяет терминалу D2D использовать определенные выбранные радиоресурсы, т.е. некоторые радиоблоки (RB), возникающие в некоторых подкадрах в течение определенного периода планирования.
Терминал D2D может передавать сообщение назначения планирования (SA) в первом наборе из одного или более подкадров D2D, а затем он может передавать данные D2D во втором наборе подкадров D2D в период планирования. Назначения планирования, среди прочего, могут содержать поле идентификатора, поле схемы модуляции и кодирования (MCS), индикатор ресурса и поле опережения синхронизации (TA). Пакеты данных D2D, среди прочего, могут содержать заголовок управления доступом к среде передачи данных (MAC) с адресом источника и получателя. Множество логических каналов могут быть мультиплексированы и отправлены посредством WTRU как часть одного транспортного блока (ТВ) в данном подкадре D2D.
Для связи D2D с использованием режима 2 терминалы D2D могут автономно выбирать временные/частотные радиоресурсы. Параметры доступа к каналу, такие как подкадры для использования с передачами управляющих сообщений SA и соответствующих данных D2D, периодов планирования или контролирующих подкадров, могут быть предварительно сконфигурированы и сохранены в терминале D2D. За исключением предшествующей индикации емкости трафика UL и фазы предоставления D2D DL, терминалы режима 2 могут следовать тому же поведению передачи, что и терминалы режима 1, а также передавать SA, за которыми следуют данные D2D в периоды планирования.
Как для режима 1, так и для режима 2 связи D2D терминалы D2D могут также передавать вспомогательные сигналы D2D, такие как, например, сигналы синхронизации D2D и сообщения канала, чтобы помогать приемникам в демодуляции передаваемых данных.
Связь D2D с использованием радиодоступа на основе LTE может содержать голосовые каналы или пакеты данных или потоки данных. Особым случаем связи D2D является сервис обнаружения D2D. Обнаружение D2D, в отличие от голосовых каналов, обычно может требовать только передачи небольших пакетов, которые зачастую могут помещаться в один, два или максимум несколько подкадров. Например, эти пакеты могут содержать данные приложения, объявляющие о доступности устройств или программных (SW) приложений для участия в обмене данными D2D с терминалами, расположенными поблизости.
Обнаружение D2D может использовать или может не использовать один и тот же протокол доступа к каналу, такой как используемый для связи D2D для голосовых или родовых данных D2D. Для обнаружения D2D в зоне покрытия базовой станции LTE ресурсы обнаружения D2D могут быть выделены отдельно от ресурсов, используемых для связи D2D посредством голосовых или родовых данных D2D. Радиоресурсы для сообщений обнаружения D2D могут быть выбраны автономно терминалами D2D из набора зарезервированных ресурсов посредством eNB и периодически повторяющихся частотно-временных радиоресурсов в определенных подкадрах UL (например, обнаружение типа 1) или они могут быть явно выделены обслуживающей сотой LTE терминалам D2D (например, обнаружение типа 2). Последний случай аналогичен связи D2D в режиме 1. При передаче сообщений обнаружения D2D передача назначений планирования может не потребоваться. Однако в некоторых случаях, даже для терминалов D2D, передающих только сообщения обнаружения D2D, все же может потребоваться передача вспомогательных сигналов синхронизации D2D для содействия работе приемников.
В настоящее время 3GPP оценивает осуществимость связи V2X на основе текущих спецификаций D2D LTE в дополнение к выявлению потенциальных усовершенствований LTE (как D2D, так и потенциально не D2D), необходимых для удовлетворения требований SA1. В рамках этого анализа осуществимости 3GPP определил четыре основных сценария V2X.
Сценарий 1 поддерживает работу V2V только на основе PC5. PC5 включает передачу данных V2X от WTRU источника, например, автомобиля, к WTRU назначения, например, другому автомобилю, устройству дорожной инфраструктуры, пешеходу и т.п. посредством прямой связи ProSe Direct Communication через интерфейс PC5 между модулями WTRU (прямое соединение).
Сценарий 2 поддерживает работу V2V только на основе Uu. Uu включает передачу данных V2X от WTRU источника (например, автомобиля) к WTRU назначения (например, другому автомобилю, дорожной инфраструктуре, пешеходу и т.д.) посредством eNB через интерфейс Uu (восходящая и нисходящая линия связи).
Сценарий 3A включает WTRU, который передает сообщение V2X другим WTRU по прямому соединению. Один из принимающих WTRU является придорожным устройством типа WTRU (RSU), который принимает сообщение V2X по прямому соединению и передает его в E-UTRAN по восходящей линии связи. E-UTRAN принимает сообщение V2X от RSU типа WTRU, а затем передает его множеству WTRU в локальной области по нисходящей линии связи.
Сценарий 3B включает WTRU, который передает сообщение V2X в E-UTRAN по восходящей линии связи, а E-UTRAN передает сообщение V2X одному или более RSU типа WTRU. Затем RSU типа WTRU передает сообщение V2X другим WTRU по прямому соединению.
В стандарте LTE могут использовать полунепрерывное планирование (SPS) как его форму полустатического выделения ресурса, которое применяют, чтобы избегать планирования служебных сигналов, связанных с динамическим планированием ресурсов для сервисов с регулярно происходящими передачами сравнительно небольших размеров полезной нагрузки (например, VoIP). SPS является возможным для передачи, как по восходящей линии связи, так и по нисходящей линии связи.
В случае SPS по восходящей линии связи, как только новые данные поступают в буфер WTRU, WTRU может составлять указания о состоянии своего буфера, используя сообщение отчета о состоянии буфера (BSR). Элементы управления BSR обычно содержат идентификатор группы логических каналов и одно или более полей, соответствующих емкости буфера. Специфический для прямого соединения BSR может также включать в себя индекс назначения, поскольку любые данные, помещенные в буфер прямого соединения, предназначены для передачи в другой WTRU, а не на eNB генерации отчетов.
В случае SPS терминал может быть снабжен планированием на физическом канале управления нисходящей линии связи (PDCCH) для указания предоставления, действующего для каждого N-го подкадра. Периодичность или значение N ресурсов SPS обеспечивают посредством сигнализации контроля радиоресурсов (RRC), в то время как активацию/деактивацию и подробные данные ресурсов обеспечивают посредством сигнализации PDCCH с использованием временного идентификатора сотовой радиосети (C-RNTI) SPS. Команда динамического планирования, возникающая в том же подкадре, что и ресурс SPS, может иметь приоритет над ресурсом SPS. Такое поведение полезно в случае, когда регулярный ресурс, выделяемый для WTRU, необходимо время от времени увеличивать.
Повторные передачи SPS по нисходящей линии связи всегда могут быть динамически запланированы, в то время как по восходящей линии связи они могут быть динамически запланированы или они могут следовать полунепрерывно выделенным подкадрам. SPS дополнительно поддерживают только в первичной соте (PCell) или первичной вторичной соте (PSCell) (в случае двусторонней связи (DC)).
Одним из основных типов сообщений, передаваемых для V2X в качестве трафика V2X, является кооперативное информационное сообщение (CAM). Сообщения CAM содержат кооперативную информацию о местоположении, динамике и атрибутах другого автомобиля, которая должна быть передана участникам дорожного движения и на коммутатор придорожной инфраструктуры. Регулярный обмен такой информацией может быть ключевым для нескольких приложений безопасности дорожного движения и эффективности дорожного движения.
CAM состоит из специфических контейнеров, которые могут быть обязательными или необязательными. Каждое сообщение CAM может содержать по меньшей мере один основной контейнер, который содержит основную информацию, относящуюся к исходной станции интеллектуальных транспортных систем (ITS-S), и один высокочастотный контейнер, который содержит высокодинамическую информацию об исходной ITS-S. Кроме того, сообщение CAM может также содержать один низкочастотный контейнер, который содержит статическую и невысокодинамическую информацию об исходной ITS-S, и один или более специальных контейнеров, которые содержат информацию, специфическую относительно роли автомобиля ITS-S исходного автомобиля, а именно для специальных автомобилей.
Некоторые примеры элементов ITS включают в себя активные системы управления дорожным движением, дорожные камеры для мониторинга погоды, заторов или других инцидентов, знаки с изменяющимися сообщениями, которые могут содержать предупреждения или другие сообщения, сеть радиостанций для информационных сообщений на автомагистралях, дорожные и метеорологические информационные системы, регулирующий въезд транспорта на скоростное шоссе, устройства сбора данных о дорожном движении и центры управления дорожным движением.
Передача сообщений CAM может быть периодической с определенными отклонениями или корректировками периода на основе направления движения, скорости, местоположения автомобиля и времени, прошедшего с момента последнего формирования сообщения CAM. Кроме того, низкочастотный контейнер должен быть включен в CAM, если время, прошедшее с момента создания последнего CAM с тем же низкочастотным контейнером, равно или превышает 500 мс. Это правило применимо также к специальному контейнеру.
Для использования связи V2X E-UTRAN должен поддерживать максимальную задержку в 100 мс для большинства вариантов использования. В то время как в варианте использования с определением параметров перед сбоем действует более жесткое требование — 20 мс, в 3GPP касательно стандартизации каких-либо связанных с V2X улучшений исходят из основного предположения о задержке в 100 мс, связанной с RAN.
SPS является предпочтительным кандидатом для передачи сообщений V2V в UL для сценария 2 и сценария 3, описанных выше, ввиду главным образом периодического характера трафика CAM. Однако пропускную способность UL на Uu сложно обеспечивать для периодов SPS 40 мс или менее из-за большого количества автомобилей в городском сценарии, которым необходимо будет передавать данные по восходящей линии связи, и поэтому может потребоваться рассматривать более длительные периоды SPS.
Предусмотрены способы определения, генерации отчетов и приема индикаторов изменения периодичности и смещения SPS. Задержка при передаче сообщения CAM посредством E-UTRAN может включать в себя один или более из следующих факторов. В качестве первого компонента задержка может включать в себя время между моментом формирования сообщения CAM приложением V2X и моментом, когда станет доступным следующий ресурс SPS UL, выделенный для WTRU. В качестве второго компонента задержка может включать в себя время, необходимое для приема и обработки сообщения CAM в сети, и может дополнительно зависеть от того, отправлено ли сообщение CAM в базовую сеть, или же обработка остается в eNB. В качестве третьего компонента задержка может включать в себя время, необходимое для передачи сообщения по нисходящему каналу в WTRU назначения с использованием односотового многоточечного соединения (SC-PTM), развитой мультимедийной широковещательной службы многоадресной передачи (eMBMS) или одноадресного планирования.
По мере увеличения периода SPS увеличивается часть времени задержки, относящаяся к первому компоненту. Такого увеличения можно избегать только в случае, если генерация сообщений CAM действительно периодична, а период SPS может быть совмещен с генерацией сообщений CAM.
На основании частоты генерации CAM нельзя предполагать истинную периодичность, и схема генерации CAM по сравнению со схемой SPS может претерпевать изменения периодичности и изменения смещения.
Изменения периодичности могут происходить в схеме генерации CAM. Например, интервал генерации CAM может изменяться динамически между 100 мс, когда местоположение, направление движения и скорость автомобиля меняются, и 1 секундой, когда местоположение, направление движения и скорость автомобиля не меняются. Кроме того, могут быть периоды времени, когда периодичность может составлять значение между указанными значениями для ряда интервалов генерации CAM, определенных базовым сервисом кооперативного информирования (CA). В результате период генерации CAM может динамически изменяться со временем и теоретически принимать любое значение между 100 мс и 1 с.
Изменения смещения могут происходить в схеме генерации CAM. Переходы между одним интервалом CAM и другим интервалом CAM, когда эти интервалы не кратны 100 мс, могут приводить к изменению смещения между генерацией сообщения и фиксированным планом SPS.
Соответственно, эти изменения в схеме генерации сообщений CAM могут приводить к увеличению первого компонента задержки и потенциально несоответствию требованиям к задержке в 100 мс при использовании SPS.
Кроме того, может изменяться размер полезной нагрузки. SPS лучше всего подходит для периодического трафика, имеющего фиксированный размер выделения ресурса, такого как передача голоса по протоколу Интернета (VoIP). Хотя отклонения в размере сообщения можно легко обрабатывать посредством динамического планирования, частое динамическое планирование может приводить к увеличению служебных данных планирования и значительно сокращать преимущества SPS. Такое сокращение преимуществ может быть еще более выраженным в случае трафика V2V, при котором предполагают (по меньшей мере для городских сценариев) наличие плотной концентрации автомобилей, и эти автомобили должны регулярно принимать данные динамического планирования. С другой стороны, излишнее выделение ресурсов приводит к потере ресурсов SPS, которые могли бы быть использованы планировщиком для других целей.
Размер сообщений CAM может составлять около 190 байт, если они содержат только высокочастотный контейнер, или около 300 байт, если они содержат высокочастотный контейнер и один или более низкочастотных контейнеров. Также возможно, что сообщения CAM со специальным контейнером будут иметь размеры, отличные от указанных. Поэтому размеры сообщений CAM довольно изменчивы. Выделяемый размер SPS можно определять более динамическим способом, не полагаясь исключительно на динамическое планирование.
Следует понимать, что термин данные D2D может относиться к любому типу связи D2D между терминалами D2D. Например, без ущерба для общности, данные D2D могут включать в себя пакеты данных или их части, такие как те, которые передают голос, они могут включать в себя пакеты протокола Интернета (IP) или их части, такие как те, которые используют для загрузки или выгрузки файлов, потоковой передачи или двунаправленного видео, они могут включать в себя сигнализацию управления D2D и/или они могут включать в себя обнаружение D2D или сервисные сообщения или сообщения о доступности. Кроме того, описанные здесь варианты осуществления представлены в общем контексте функции связи D2D 3GPP, но эта концепция может быть применима к другим функциям, таким как, например, обнаружение D2D.
В данном описании вводят следующие концепции: WTRU может отправлять запрошенное смещение или изменение смещения для SPS; WTRU может отправлять указание об изменении конфигурации SPS; WTRU может отправлять указание об освобождении специфических ресурсов; может быть предусмотрено множество конфигураций SPS и описаны способы активации/деактивации конфигураций; размер сообщения SPS может быть сконфигурирован прикладным уровнем; размер сообщения SPS может быть связан с QCI для логического канала; изменения выделяемого размера могут быть совмещены в передачах SPS; описаны способы периодического увеличения выделяемого размера SPS; WTRU может запрашивать SPS на основании инициатора из приложения; усовершенствования конфигурации SPS могут быть приняты WTRU. Усовершенствования могут включать формат и время предоставления вспомогательной информации, допустимые смещения, изменение которых WTRU может запрашивать, индекс конфигурации SPS, допустимые логические каналы для конфигурации SPS или конфигурации ресурсов. Для отправки информации об изменении смещения может быть предусмотрен новый инициатор для BSR прямого соединения. Рассчитываемые инициаторы на основе приложений и слоя доступа (AS) для отправки изменения конфигурации SPS/смещения или активации/деактивации могут быть основаны на информации верхнего уровня. Приоритезация логического канала (LCP) может быть применена к предоставлению SPS на основе объединения логического канала и конфигурации SPS. WTRU может выбирать одно предоставление SPS в случае одновременно происходящих предоставлений. Описан уровень адаптации LTE для включения/отключения использования SPS и обеспечения синхронизации, основанной на временной компенсации и информации об интервале.
В данном описании термин «WTRU» может означать одно устройство с поддержкой D2D, которое может быть реальным мобильным устройством, автомобилем, имеющим возможность связи D2D, и/или придорожным устройством, предназначенным для улучшения рабочих характеристик системы V2X. «WTRU» может дополнительно представлять собой мобильное устройство, непосредственно связывающееся с eNB. Подобным образом термин «eNB» означает традиционный eNB, который используют в коммуникационной инфраструктуре LTE и который может обеспечивать сервисы связи для связи D2D в зоне покрытия. eNB может быть развернут на сотовой вышке или в качестве придорожного устройства, причем в последнем случае eNB может иметь функциональность, ограниченную только связью D2D.
Как дополнительно описано в данном документе, рассматривают сообщения CAM, которые конкретно ссылаются на сообщения приложений, связанные с V2V, которые передают посредством радиоинтерфейса AS. В описанных вариантах осуществления сообщения CAM могут представлять собой сообщения любого типа верхнего уровня, которые модулю WTRU необходимо передавать с использованием SPS по восходящей линии связи или посредством прямого соединения. Такое сообщение может обладать свойством критичности по времени или чувствительности к задержке. Такие сообщения дополнительно могут считать периодическими в течение большей части времени или в течение значительной части времени со случайными изменениями периода, синхронизации (смещения) или размера сообщения.
Фиг. 2 представляет собой схему примера временной шкалы синхронизации CAM 200. Принимая во внимание пример временной шкалы, показанной на фиг. 2, потенциальные проблемы могут быть явно связаны с использованием фиксированного (например, 100 мс) периода 202 для SPS в случае весьма правдоподобного сценария интенсивного движения для автомобиля. В этом примере автомобиль выполняет следующие действия, указанные на следующей примерной временной шкале.
По истечении периода времени, когда автомобиль удовлетворяет первому условию, например изменение скорости, положения или направления движения, автомобиль прекращает удовлетворять условию 1, например, автомобиль останавливается 204. Автомобиль снова начинает удовлетворять условию 1, когда он снова начинает движение 206. Автомобиль может начинать торможение 208. Автомобиль прекращает удовлетворять условию 1 и останавливается 210. Автомобиль вновь спустя 160 мс после последнего САМ начинает удовлетворять условию 1, например, он вновь начинает двигаться, но лишь на очень короткое время 212. Затем CAM становятся разделенными промежутком 160 мс в течение 3 интервалов, пока они не вернутся, чтобы происходить с интервалом в 1 секунду.
Соответственно, результирующая синхронизация CAM с использованием конфигурации SPS с периодом 100 мс показана на временной шкале 200. Такая конфигурация может приводить к потенциально большому количеству ресурсов SPS, которые не использует WTRU 214 216, для которых планировщик не может предусматривать повторное использование. Хотя ресурсы могут быть неявно освобождены после нескольких пустых передач WTRU, частые переходы между этими двумя состояниями могут по-прежнему вызывать потерю ресурсов, и WTRU может все еще нуждаться в связи с eNB для повторного выделения ресурсов. Кроме того, в этой конфигурации могут возникать большие задержки ожидания (от 30 мс до 90 мс). Эти большие задержки ожидания должны быть добавлены к общему времени задержки E-UTRAN для сообщений V2X и, вероятно, приведут к несоблюдению требования относительно 100 мс.
Следует понимать, что хотя вышеупомянутые проблемы описаны со ссылкой на сообщения CAM, проблемы могут возникать для других типов трафика, связанного с приложениями, такими как VoIP, управление в реальном времени и т.д. В результате описанные в настоящем документе варианты осуществления могут применять не только для варианта использования V2V, но и для любого варианта использования, в котором трафик демонстрирует свойства, подобные CAM.
Описана конфигурация SPS, в которой WTRU может запрашивать использование SPS, и/или конфигурация SPS предоставлена посредством eNB. Например, WTRU может запрашивать использование SPS у eNB. Такой запрос может быть отправлен WTRU посредством сигнализации RRC. Например, WTRU, запрашивающий SPS у eNB, может это сделать, используя сообщение RRC WTRUSidelinkInformation. WTRU может отправлять запрос на использование SPS как результат инициатора с верхних уровней, причем в одном варианте осуществления используют описанный в настоящем документе уровень адаптации.
WTRU может включать в себя один или более информационных элементов, связанных с параметрами SPS, в запросе конфигурации SPS. Например, WTRU может включать в себя информацию, связанную с одной или более желаемых конфигураций SPS, каждая из которых содержит одну или более периодичностей и/или смещений конфигурации SPS, размер передачи (например, размер транспортного блока (TBS)), количество блоков ресурса RB и т.д. В другом примере WTRU может включать в себя информацию, относящуюся к желаемым параметрам одной или более запрошенных конфигураций SPS, в виде набора индексов, каждый из которых указывает на ряд в предварительно сконфигурированной таблице, где каждый ряд в таблице содержит набор желаемых параметров SPS для этой желаемой конфигурации SPS.
В ответ на запрос SPS от WTRU узел eNB может передавать конфигурацию SPS в WTRU. В альтернативном варианте осуществления eNB может передавать конфигурацию SPS в WTRU без запроса SPS и, таким образом, может передавать конфигурацию SPS автономно или с применением какого-либо другого инициатора.
Для передачи сообщений по Uu WTRU может использовать существующий SPS восходящей линии связи в LTE. Кроме того, аналогичная конфигурация SPS может быть выполнена с возможностью SPS прямого соединения, а конфигурация SPS прямого соединения может быть отправлена посредством обмена сообщениями RRC или комбинации сообщений RRC с элементом управления (CE) MAC и PHY-сообщением в PDCCH. Конфигурация SPS восходящей линии связи или прямого соединения может дополнительно содержать конфигурацию (например, информацию о конфигурации) вспомогательной информации WTRU и/или конфигурацию прямого соединения.
Вспомогательная информация WTRU включает в себя информацию, отправляемую WTRU на eNB для содействия eNB в настройке параметров SPS. Возможны различные типы информации о конфигурации в отношении вспомогательной информации WTRU. WTRU может принимать конфигурацию вспомогательной информации WTRU, относящуюся к тому, возможно ли предоставление вспомогательной информации на eNB, имеющий отношение к плану SPS, и какой тип вспомогательной информации может быть предоставлен (например, синхронизация, период) и как отправлять такую информацию. Конфигурация вспомогательной информации WTRU может разрешать или запрещать WTRU передавать вспомогательную информацию о планировании SPS. WTRU может принимать список возможных смещений времени для схемы ресурсов SPS, причем смещение может быть определено относительно специфического номера SFN/подкадра и/или относительно начала периода планирования. WTRU может принимать список возможных периодов/интервалов SPS, которые могут быть выбраны или изменение которых может быть запрошено. Список возможных периодов/интервалов SPS может быть подмножеством возможных периодов SPS, которые WTRU может поддерживать или которые eNB может конфигурировать или назначать для данного WTRU. WTRU может потенциально запрашивать изменение только одного из конфигурируемых списков периодичности eNB. WTRU может принимать конфигурацию ресурса (например, UL), используемого для отправки вспомогательной информации. Например, вспомогательная информация может быть отправлена с использованием выделенных ресурсов SR, конфигурируемых eNB специально для этой цели. WTRU может принимать допустимые экземпляры времени и частоту, с помощью которых может быть отправлена вспомогательная информация. Например, WTRU может быть выполнен с возможностью предоставления вспомогательной информации в конце каждого периода планирования или периодически на основе периода, определяемого eNB.
Для прямого соединения может быть предоставлена конфигурация SPS подкадров в каждом периоде планирования в соответствии с ресурсом SPS. Такие подкадры могут быть одинаковыми в каждом периоде планирования и могут дополнительно определять подкадры для повторной передачи данных, передаваемых с использованием SPS, а также количество требуемых повторных передач.
WTRU может принимать в конфигурации SPS список возможных конфигураций ресурсов SPS, которые могут быть активированы. Этот список может быть реализован с использованием набора индексов, указывающих на предопределенную таблицу поиска. WTRU может активировать одну из возможных конфигураций SPS из списка. В альтернативном варианте осуществления WTRU может одновременно активировать множество конфигураций SPS.
Может быть предоставлена конфигурация ресурсов конфигурации SPS или каждая конфигурация в списке конфигурации SPS. Например, каждая конфигурация SPS может соответствовать специфической схеме ресурсов SPS с периодичностью (т.е. интервалом), смещением времени, выделяемым размером, реально используемыми ресурсами (блоками ресурсов) или схемой выделяемого размера. Схема выделяемого размера может быть определена таким образом, что 1 в специфическом количестве ресурсов SPS имеет другое (т.е. увеличенное или уменьшенное) количество ресурсов относительно выделяемого размера SPS. Для SPS прямого соединения конфигурация ресурсов может быть выполнена, как в случае SPS восходящей линии связи, где интервал/период сконфигурирован в RRC, и конфигурация синхронизации/смещения и ресурсов может быть указана модулю WTRU посредством eNB, например, посредством сигнализации уровня PHY. В случае прямого соединения сигнализация уровня PHY могла быть PDCCH с DCI формата 5, отправленной с использованием C-RNTI SPS, сконфигурированного на уровне RRC. В альтернативном варианте осуществления для SPS прямого соединения конфигурация ресурсов может быть отправлена в сообщении RRC (например, интервал, смещение и выделяемый размер и/или схема выделения могут быть отправлены посредством сообщения RRC).
Конфигурация SPS может дополнительно включать идентификацию данных, которые WTRU должен передавать или приоритезировать при использовании каждой специфической конфигурации SPS, которая может быть в виде допустимого логического канала, группы логических каналов, приоритета (например, приоритета ProSe Per-Packet (PPPP)), радиопеленгатора, идентификатора приложения, QCI и т.п. Например, WTRU может быть выполнен с множеством конфигураций SPS, и каждая конфигурация SPS должна быть использована для передачи данных для специфического логического канала или группы логических каналов.
Конфигурация SPS может дополнительно включать в себя идентификацию идентификатора (-ов) назначения прямого соединения, для которого применяют конфигурацию SPS.
Предусмотрено изменение синхронизации SPS. Предусмотрен WTRU, который отправляет запрошенное смещение или изменение смещения для SPS. Как показано на временной шкале на фиг. 2, во избежание дополнительной задержки в доставке сообщений CAM, связанной с ожиданием передачи следующим ресурсом SPS ожидающего CAM, генерация сообщений CAM должна быть совмещена по времени с ресурсами SPS. Предполагая использование одинакового интервала как для CAM, так и для SPS, задержка на ожидание будет равна нулю.
Однако смещение SPS, конфигурируемое eNB (т.е. синхронизация предоставления PDCCH с C-RNTI SPS в случае, если SPS UL), полностью определено eNB, поэтому это не может быть гарантировано с помощью существующих механизмов SPS.
В одном примере WTRU может отправлять на eNB желаемый начальный подкадр (т.е. смещение) для ресурса SPS, чтобы позволять eNB инициировать выделение/повторное выделение ресурса SPS, чтобы оно было совмещено с генерацией сообщений CAM. В частности, WTRU может отправлять временное смещение, например, в виде номера кадра в системе (SFN) и/или индекса подкадра, на eNB, указывая время, когда он ожидает (начала) доступности ресурса SPS. Временное смещение (или «смещение») также может быть неявно отправлено на eNB, предполагая, что SFN и/или подкадр являются фиксированным предварительно определенным количеством подкадров, следующих за передачей сигнала модулем WTRU на eNB.
В альтернативном варианте осуществления WTRU может указывать узлу eNB на задержку или смещение текущего смещения SPS на определенное значение во времени. Например, WTRU уже может быть выполнен с конфигурацией SPS и специфическим временным смещением или начальной точкой для ресурсов в этой конфигурации SPS. WTRU может указывать узлу eNB на смещение, задержку, продвижение во времени или начальную точку для этой конфигурации SPS в виде определенного количества подкадров относительно текущего времени ресурсов.
WTRU может быть выполнен с множеством вариантов синхронизации. Например, чтобы уменьшать объем сигналов, связанных с запрошенным посредством eNB изменением смещения, WTRU может быть дополнительно сконфигурирован с набором возможных смещений времени посредством eNB, где одно специфическое смещение времени может быть активным в данный момент времени, и WTRU может запрашивать альтернативное смещение времени в сообщении о запросе на изменение смещения.
WTRU может принимать множество возможных смещений в сообщении RRC, которое конфигурирует SPS. Эти смещения могут быть указаны как смещение от специфического SFN/подкадра, или определенного, или предоставленного в той же конфигурации, или как смещение от начальной конфигурации ресурсов в сообщении PDCCH, указанном C-RNTI SPS, который может выделять ресурсы SPS для конфигурации в первый раз.
WTRU может дополнительно принимать или связываться с индексом для каждого из возможных смещений в сообщении RRC.
При отправке запрошенного изменения смещения на eNB модуль WTRU может указывать желаемое смещение, которое он хочет использовать, указывая индекс, связанный с одним из сконфигурированных смещений.
На фиг. 3A описано использование 4-битового индикатора 300 значения интервала. При четырех битах значение 302 может представлять собой размер интервала. В этом примере показано до 16 различных интервалов, предполагая использование четырех битов. Здесь значение 0000 304 соответствует минимальному интервалу 306 в 100 миллисекунд. Показанное максимальное значение 1001 308 соответствует длинному интервалу 310 в 1 секунду. Фиг. 3B представляет собой пример элемента 320 управления MAC, состоящего из 4-битового индикатора 322 интервала и 10-битового номера кадра в системе 324, используемого в качестве смещения. 10-битовый номер кадра в системе может быть уменьшен путем использования смещения SFN от текущего SFN вместо 0.
В запросе на смещение или сообщении об изменении смещения могут быть предоставлены различные типы информации. Запрос на смещение или изменение смещения может содержать любое из: смещение SFN и/или подкадра SPS (т.е. синхронизация одного из ресурсов SPS), требуемый сдвиг во времени (положительный или отрицательный и потенциально выражаемый в виде кадров, подкадров или некоторой единицы подкадров, такой как периоды планирования) схем ресурсов SPS относительно текущей временной схемы, индекс, определяющий одно из нескольких возможных смещений времени для схемы ресурсов SPS (потенциально сконфигурированная посредством eNB или предварительно определенная), и идентификация процесса SPS (если сконфигурировано множество), для которого необходимо изменять синхронизацию.
Смещение SFN и/или подкадра SPS, например, синхронизация одного из ресурсов SPS, может быть представлено любым из следующего: абсолютный SFN и подкадр первого ресурса SPS с разделением других ресурсов конфигурируемым периодом SPS, смещение от предопределенного фиксированного подкадра (например, SFN 0 (mod x) и подкадр 0), смещение от начала периода планирования, связанного с пулом ресурсов прямого соединения, и/или смещение от исходной передачи посредством eNB канала PDCCH с C-RNTI SPS, канала PDCCH с DCI формата 5 или любого аналогичного сообщения канала PDCCH, используемого eNB для инициирования выделения ресурса SPS после его конфигурации.
Касательно индекса, идентифицирующего один из нескольких возможных смещений времени для схемы ресурсов SPS, потенциально сконфигурированной посредством eNB или предварительно определенной, eNB может отправлять в конфигурации SPS набор допустимых индексированных смещений, а WTRU может предоставлять изменение смещения путем предоставления индекса, соответствующего желаемому смещению.
Касательно идентификации процесса SPS (в случае конфигурации множества), для которого необходимо изменять синхронизацию, такую идентификацию можно выполнять путем отправки индекса, который ссылается на индекс, предоставляемый eNB в конфигурации множества SPS. Такая идентификация также может быть выполнена путем отправки индекса, соответствующего порядку предоставлений SPS относительно специфической комбинации кадров/подкадров (например, SFN x mod y, подкадр 0).
Такую информацию, относящуюся к запросу на смещение или изменение смещения, далее именуют информацией об изменении смещения.
WTRU может отправлять такой запрос на смещение или изменение смещения, используя одно или более из следующего. Запрос на смещение может быть предоставлен в сообщении RRC, содержащем информацию об изменении смещения, которое может приходить после сообщения RRCRadioResourceConfiguration, которое конфигурирует SPS в WTRU, или в любое время после подсоединения WTRU к eNB. Запрос на смещение может быть предоставлен в элементе управления (CE) MAC, содержащем информацию об изменении смещения.
Запрос на смещение может быть предоставлен в BSR, содержащем информацию об изменении смещения. В частности, WTRU может инициировать BSR при определении им необходимости в изменении синхронизации выделения SPS. BSR может быть BSR прямого соединения в случае, если ресурсы SPS и передачи находятся на PC5, а не на UL. Информация об изменении смещения может быть включена в BSR или BSR прямого соединения.
Например, BSR или BSR прямого соединения могут включать в новом поле SFN и подкадр, сдвиг во времени или индекс конфигурации SPS для конфигурации SPS. Такая информация может быть дополнительно связана с группой логических каналов, для которой WTRU может использовать указанную конфигурацию SPS для передачи данных. Информация может быть в виде одного или более дополнительных полей по размеру буфера, связанного с группой логических каналов.
BSR или BSR прямого соединения может включать SFN, подкадр, сдвиг во времени может быть отправлен вместо размера буфера для специфической группы логических каналов. WTRU может использовать специальное поле индекса назначения, группу логических каналов или комбинацию этих двух элементов, чтобы указывать, что соответствующие поля размера буфера указывают информацию о синхронизации SPS вместо обычных значений.
BSR или BSR прямого соединения может содержать специальный флаг, который указывает, что в результате передачи BSR идет запрос на изменение синхронизации SPS. Запрашиваемая новая синхронизация конфигурации SPS может быть указана экземпляром времени, в котором WTRU отправляет BSR. Например, WTRU может указывать, что новое смещение или синхронизация SPS соответствует нескольким подкадрам (возможно, 0), следующим после подкадров, в которых осуществлялась передана BSR.
BSR или BSR прямого соединения может содержать индекс, связанный с одним из заранее определенных или допустимых смещений времени для схемы SPS.
Запрос на смещение может быть предусмотрен в сообщении физического (PHY) уровня, таком как, без ограничений, запрос планирования (SR), физический канал управления восходящей линии связи (PUCCH), зондирующий опорный сигнал (SRS) или канал произвольного доступа (RACH). Например, специальный выделенный ресурс SR может быть выделен WTRU для отправки желаемого смещения SPS. Различные SR могут быть сконфигурированы в случае наличия множества конфигураций SPS. Можно понимать, что реальный SFN и смещение для начала ресурса SPS происходят спустя определенное количество подкадров после подкадра, в котором специальный SR был передан WTRU, например, в том же подкадре или через предварительно определенное количество подкадров, известных как модулю WTRU, так и узлу eNB.
WTRU может передавать сообщение о запросе смещения в любое время в процессе работы, чтобы изменять смещение текущих ресурсов SPS. Например, в результате одной из передач, показанных на временной шкале на фиг. 2, которая может изменять смещение между SPS и CAM, но при этом интервалы для обоих остаются неизменными, WTRU может передавать запрошенное сообщение о смещении на eNB. Более подробные инициаторы для передачи WTRU сообщения о запросе смещения описаны ниже.
WTRU принимает подтверждение изменения синхронизации от eNB. В частности, после передачи сообщения о запросе смещения WTRU может принимать подтверждение изменения синхронизации от eNB, который может обеспечивать новую синхронизацию для конфигурации SPS. Такое подтверждение может быть принято с использованием любого из следующего: сообщение PDCCH, сообщение CE MAC или сообщение RRC.
Что касается сообщения PDCCH, то подтверждение изменения синхронизации может быть указано с помощью C-RNTI SPS, который определяет конфигурацию SPS, а также новую синхронизацию ресурсов SPS. В случае множества конфигураций SPS каждая конфигурация SPS может быть представлена отдельным C-RNTI SPS.
Фиг. 4 представляет собой пример заголовка 402 MAC и полезной нагрузки 404 MAC, которые содержат множество сообщений 406, 408 CE MAC. Что касается одного или более сообщений 406, 408 CE MAC, то подтверждение изменения синхронизации может быть указано сообщением, содержащим новую синхронизацию, используя, например, смещение SFN и/или подкадра, и идентификацию конфигурации SPS, обозначенную здесь интервалом I2. Номер подкадра 412 может быть включен в CE MAC. Полезная нагрузка 404 Mac может дополнительно содержать один или более MAC SDU 414 и заполнение 416.
Что касается сообщения RRC, то подтверждение изменения синхронизации может быть указано сообщением, содержащим новую синхронизацию (смещение SFN и/или подкадра) и идентификацию конфигурации SPS.
WTRU может применять/предполагать/выводить новую синхронизацию ресурсов при получении подтверждения изменения синхронизации от eNB. WTRU может дополнительно предполагать, что новая синхронизация будет такой, как предусмотрено в сообщении о запросе смещения (если eNB не предоставляет синхронизацию), или он может предполагать, что новая синхронизация является синхронизацией, предусмотренной в подтверждении изменения синхронизации от eNB.
WTRU может принимать подтверждение от eNB, используя PDCCH или CE MAC. В этом случае WTRU может предполагать, что происходит поддержка существующей конфигурации RRC SPS и простое изменение синхронизации с использованием информации, содержащейся в сообщении подтверждения. В случае, если WTRU принимает подтверждение с использованием RRC, подтверждение может дополнительно предоставлять новую конфигурацию SPS. Затем WTRU может обновлять свою конфигурацию RRC, используя конфигурацию, указанную в сообщении подтверждения.
Например, после передачи сообщения о запросе смещения WTRU может принимать соответствующий PDCCH с помощью C-RNTI SPS, чтобы сигнализировать об изменении синхронизации SPS с новым смещением. WTRU может предполагать, что предыдущая синхронизация ресурсов SPS (со старым смещением) сохраняется, пока он не примет PDCCH с C-RNTI SPS (что должно происходить при запрошенном смещении).
На фиг. 5 показан пример синхронизации сообщений 500 в соответствии с запросом смещения или изменения смещения, в котором WTRU отправляет запрошенное смещение или изменение смещения для SPS. Автомобиль или WTRU 502 может передавать запрос 506 соединения RRC на eNB 502. WTRU 502 может принимать в ответ сообщение 508 реконфигурации соединения RRC. Сообщение реконфигурации соединения RRC может включать в себя spsConfig. Сообщения Cam могут быть запущены прикладным уровнем 510. WTRU 502 может передавать сообщение 512 запроса смещения. WTRU по PDCCH может принимать C-RNTI 514 SPS. WTRU может начинать использовать ресурсы SPS с запрошенным смещением 516. Если изменение в сообщениях 518 о смещении CAM определено приложением или иным образом, WTRU 502 может передавать смещение другим сообщением 520 о запросе. После приема PDCCH с C-RNTI 522 SPS модуль WTRU может начинать использовать ресурсы SPS со вновь запрошенным смещением 524.
Предусмотрены инициаторы WTRU для отправки на eNB смещения или изменения смещения. На основании любой информации, предоставляемой ниже определенными верхними уровнями (например, указание верхнего уровня времени поступления сообщения, указание изменения периодичности, указание изменения синхронизации, сообщение, помеченное верхними уровнями с помощью тегов, информация на основе обеспечения WTRU синхронизации верхним уровням и информация, связанная с изменениями динамики автомобиля), WTRU может определять необходимость отправки на eNB изменения смещения на основе одного или более из следующих инициаторов.
Инициатор может быть, когда указание изменения синхронизации принято от верхних уровней.
Инициатор может быть указан временем поступлений сообщений от верхних уровней, возможно, связанных со специфическим PPPP или QCI, или поступления сообщения в специфический радиопеленгатор, логический канал и т.п. при удовлетворении одного из следующих условий.
Инициатор может возникать, когда время между приемом указания верхних уровней и последующим следующим запланированным ресурсом SPS превышает определенное пороговое значение Ta или меньше определенного порогового значения Tb. Пороговое значение Tb может соответствовать предполагаемой для AS задержке обработки, и поэтому случай разности времени, меньшей чем пороговое значение, соответствует требуемой слоем доступа AS задержке обработки, превышающей эту разность.
Инициатор может возникать, когда разность времени между поступлением текущего и предыдущего сообщения отличается (например, на сконфигурированную величину) от предыдущих Na интервалов синхронизации между поступлениями сообщений или отличается (например, на предварительно определенную сконфигурированную величину) от определенной периодичности сообщений (такая периодичность может быть обеспечена прикладным уровнем или определена нижними уровнями WTRU).
Инициатор может возникать, когда время поступления сообщения приближается по времени к другому потенциальному времени для ресурсов SPS (например, конфигурируемых посредством eNB).
Инициатор может возникать, когда вышеописанные условия синхронизации последовательно повторяются (xNb) число раз.
В случае, когда WTRU отправляет информацию о желаемом смещении или синхронизации SPS, WTRU может вычислять эту информацию на основе одного или более из следующего.
WTRU может выбирать смещение времени, чтобы совпадать с любым подкадром, составляющим по меньшей мере Tc миллисекунд после времени сообщения CAM (где Tc может быть равным нулю).
WTRU может выбирать смещение времени, чтобы совпадать с подмножеством допустимых подкадров или допустимым временем, составляющим по меньшей мере Td миллисекунд после времени сообщения CAM, при этом сводя к минимуму разность времени между ресурсом SPS и временем сообщения CAM. Подмножество допустимых подкадров может быть сконфигурировано посредством eNB. Например, подмножество допустимых подкадров может состоять из допустимых подкадров D2D для прямого соединения, как определено схемой подкадров TRPT или D2D для WTRU, определенного посредством eNB, или пулом передачи WTRU на PC5. WTRU может выбирать одно из предварительно сконфигурированных смещений времени, предварительно конфигурируемых посредством eNB, сводя к минимуму разность времени между ресурсом SPS и временем сообщения CAM.
В другом примере WTRU может отправлять указание об изменении конфигурации SPS в сети (например, eNB) для изменения периода и/или интервала планирования конфигурации SPS. Например, WTRU может отправлять указание на eNB для запроса изменения интервала планирования текущей конфигурации SPS. В частности, при поступлении инициатора от верхних уровней (например, обнаружение необходимости в изменении частоты CAM ввиду изменения динамики автомобиля) WTRU может информировать eNB о необходимости изменения конфигурации SPS (например, интервала планирования и/или смещения). WTRU может предполагать, что изменение конфигурации может происходить в результате этого указания. В альтернативном варианте осуществления WTRU может принимать сообщение от eNB, содержащее новую конфигурацию SPS или подтверждающее изменение конфигурации, запрошенное WTRU. Затем может вступать в силу изменение конфигурации (т.е. WTRU начинает использовать новые сконфигурированные ресурсы SPS) в любом из следующих моментов времени: при приеме указания узлом eNB (например, на основе приема модулем WTRU подтверждения (ACK) от eNB, например, по физическому каналу индикатора гибридного ARQ (PHICH)); в какой-то будущий момент времени, указанный WTRU; в какой-то будущий момент времени, который определен статически (т.е. в спецификации WTRU) и который может быть отнесен к последнему выделению ресурса SPS, времени, когда eNB принял указание (например, как определено временем передачи WTRU и/или приемом ACK от eNB по PHICH), времени, когда WTRU передал указание на eNB, или моменту времени, явно указанному в указании; при приеме WTRU новой конфигурации SPS посредством eNB; и/или при приеме WTRU подтверждения того, что указание было принято eNB. Подтверждение того, что указание было принято eNB, может быть отправлено с использованием одного или более из следующего: одно или более сообщений RRC, таких как освобождение SPS, за которым следует новая конфигурация SPS; предоставление PDCCH с использованием C-RNTI SPS, связанного с конфигурацией; PDCCH с использованием нового C-RNTI или с применением нового формата информации управления нисходящей линии связи (DCI); и/или новый CE MAC.
Основываясь на любой информации, предоставляемой верхними уровнями, определенными в разделе 4.1.5, WTRU может определять необходимость в отправке указания об изменении конфигурации SPS. Указание об изменении конфигурации SPS может быть отправлено WTRU на eNB как результат инициатора.
Предусмотрен инициатор WTRU для отправки изменения конфигурации SPS. Например, на основании любой информации, предоставляемой ниже определенными верхними уровнями (например, указание верхних уровней времени поступления сообщения, указание изменения периодичности, указание изменения синхронизации, сообщение, помеченное верхними уровнями с помощью тегов, информация на основании обеспечения WTRU синхронизации верхним уровням и информация, связанная с изменениями динамики автомобиля), WTRU может определять необходимость отправки указания об изменении конфигурации SPS на основе любого из следующих инициаторов.
Инициатор может быть вызван определением, выполняемым AS, описанным ниже уровнем адаптации или прикладным уровнем того, что период сообщений CAM изменился. Такое определение, выполняемое или AS, или уровнем адаптации, может следовать правилам, определяемым ниже для уровня адаптации с целью управления SPS для описанных ниже сообщений CAM, и может быть основано на информации, предоставляемой верхними уровнями.
Инициатор может быть вызван из AS или из прикладного уровня V2X, работающего на WTRU, до, во время или после генерации CAM, отправляемого с интервалом CAM, отличным от предыдущего интервала.
AS в WTRU или самом eNB может инициировать указание на eNB после определения того, что интервал CAM изменился (например, сообщение CAM принято с интервалом, меньшим, чем предыдущий интервал, либо сообщение CAM не было принято в ожидаемое время относительно последнего интервала).
Количество предстоящих интервалов, в течение которых интервал CAM, как ожидают, остается прежним (и его соответствующее значение), может инициировать указание на eNB.
Указание того, что интервал CAM изменился, достигнув максимального значения (1 с), может инициировать указание на eNB.
WTRU может отправлять в качестве части инициированного указания на eNB одно или более из следующих сведений: новый интервал планирования, запрошенный для конфигурации SPS; подкадр, в котором должны начинаться ресурсы SPS с новым интервалом планирования (т.е. смещение); требуемый размер ресурса для ресурсов SPS; индекс, идентифицирующий один из нескольких возможных смещений времени для схемы ресурсов SPS; и/или идентификация процесса SPS (например, если сконфигурировано несколько процессов), для которого необходимо изменять синхронизацию.
Касательно нового интервала планирования, запрошенного для конфигурации SPS. WTRU может предоставлять eNB одну из возможных периодичностей SPS, которая была первоначально сконфигурирована посредством eNB. В альтернативном варианте осуществления WTRU может предоставлять eNB любую периодичность, поддерживаемую для SPS (предварительно определяемую или стандартизованную).
Касательно индекса, идентифицирующего один из нескольких возможных смещений времени для схемы ресурсов SPS (потенциально сконфигурированной посредством eNB или предварительно определенной), eNB может отправлять в конфигурации SPS набор допустимых индексированных смещений, а WTRU может предоставлять изменение смещения путем предоставления индекса, соответствующего желаемому смещению.
Касательно идентификации процесса SPS (например, в случае конфигурации множества), для которого необходимо изменять синхронизацию, такую идентификацию можно выполнять путем отправки индекса, который ссылается на индекс, предоставляемый eNB в конфигурации множества SPS. В альтернативном варианте осуществления такая идентификация также может быть выполнена путем отправки индекса, соответствующего порядку предоставлений SPS относительно специфической комбинации кадров/подкадров (например, SFN x mod y, подкадр 0).
Указание может быть отправлено WTRU на eNB, используя один из следующих способов: новый CE MAC; новый специальный BSR, который может содержать приведенную выше информацию; SR, потенциально отправляемый на ресурс, предварительно определяемый для информирования eNB об этом событии, после передачи вышеуказанной информации с использованием BSR или CE MAC; PUCCH, потенциально отправляемый на ресурс, предварительно определяемый для информирования eNB об этом событии; новый CE MAC, но отправляемый в самом ресурсе SPS; RACH или аналогичная передача WTRU, выполняемая при следующем доступном ресурсе RACH; или сообщение RRC.
После передачи указания на eNB модуль WTRU может продолжать использовать существующую конфигурацию SPS для передачи CAM, пока не примет подтверждение от eNB. В альтернативном варианте осуществления, если подтверждение не ожидают, WTRU может изменять ресурсы SPS, чтобы использовать для передачи CAM в новую конфигурацию в любом из описанных выше моментов времени запуска (т.е. SPS изменяется неявно на основе отправки указания).
На фиг. 6 приведена блок-схема обмена сообщениями в примере осуществления. Как показано на фиг. 6, слой доступа WTRU может принимать сообщение от прикладного уровня 602 при возникновении описанного ниже инициирующего условия (1) или (2). Согласно условию (1) время, прошедшее с момента последней генерации CAM, равно или более чем T_GenCam_Dcc, и задано одно из следующих условий, связанных с динамикой ITS-S: абсолютная разница между текущим направлением исходной ITS-S и направлением, включенным в CAM, ранее переданное исходной ITS-S, превышает 4°; расстояние между текущим расположением исходной ITS-S и расположением, включенным в CAM, ранее переданное исходной ITS-S, превышает 4 м; или абсолютная разница между текущей скоростью исходной ITS-S и скоростью, включенной в CAM, ранее переданное исходной ITS-S, превышает 0,5 м/с. В этом случае T_GenCam_Dcc предоставляет минимальный временной интервал между двумя последовательными генерациями CAM, чтобы уменьшать генерацию CAM в соответствии с требованиями использования канала для децентрализованного контроля перегрузки (DCC). Согласно условию (2) время, прошедшее с момента последней генерации CAM, равно или более чем T_GenCam и равно или более чем T_GenCam_Dcc. Здесь T_GenCam представляет текущий действующий верхний предел интервала генерации CAM.
Инициатор от приложения или объекта, управляющего динамикой автомобиля, в котором скорость, направление или местоположение изменилось из состояния, при котором указанное выше инициирующее условие (1) являлось истиной, в состояние, при котором условие (1) не является истиной.
После определения того, что интервал SPS необходимо изменять с интервала I1 на интервал I2 (например, после получения сообщения от прикладного уровня при возникновении инициирующего условия (1) или (2), слой доступа WTRU может отправлять CE MAC 604 на eNB, содержащий I2, а также подкадр, в котором RAN ожидает возможность отправки следующего сообщения CAM (т.е. новое смещение времени). Впоследствии WTRU может быть запланирован с использованием динамически планируемых ресурсов или может отправлять SR, чтобы инициировать планирование таких динамических ресурсов, и может отправлять любые ожидающие сообщения CAM с использованием динамически планируемых ресурсов. В некоторый момент после указания с использованием CE MAC слой доступа WTRU может быть запланирован на PDCCH с использованием C-RNTI SPS. После приема этого планирования на канале PDCCH модуль WTRU может предполагать изменение конфигурации SPS и использование интервала планирования I2 для этого SPS. WTRU также может соответствующим образом изменять соответствующий элемент конфигурации RRC.
Фиг. 7 представляет собой пример осуществления, который может сокращать время, необходимое для передачи eNB сигнала об изменении SPS. Слой доступа WTRU может принимать сообщение от прикладного уровня 702 при возникновении любого инициирующего условия, например, описанного выше условия (1) или (2). После определения того, что интервал SPS необходимо изменять с интервала I1 на интервал I2 704, слой доступа WTRU может отправлять новый специальный BSR 706, который содержит интервал I2 и подкадр, в котором слой доступа ожидает возможности отправки следующего сообщения CAM (т.е. нового смещения времени). После приема ACK, связанного с модулем данных протокола (PDU) MAC, в котором передан специальный BSR, WTRU может предполагать, что конфигурация SPS изменилась в соответствии с запросом. WTRU также может соответствующим образом изменять соответствующий элемент конфигурации RRC.
В другом примере осуществления слой доступа WTRU может принимать сообщение от прикладного уровня или верхних уровней, указывающее на то, что периодичность сообщений CAM изменилась, например, с 1 секунды на 200 мс. После получения этой информации слой доступа WTRU может отправлять CE MAC, содержащий идентификацию конфигурации SPS, период которой должен изменяться, а также новый требуемый период для конфигурации SPS. WTRU может продолжать предполагать текущую конфигурацию SPS, пока он не примет новую конфигурацию SPS (например, посредством обмена сообщениями RRC) от eNB. WTRU может отменять текущую конфигурацию SPS после приема новой конфигурации SPS и включать новую конфигурацию SPS только после приема сообщения канала PDCCH (например, DCI формата 5 для прямого соединения), закодированного с использованием C-RNTI SPS, связанного с новой конфигурацией SPS.
WTRU может также отправлять указание, сообщение и/или уведомление для освобождения специфических ресурсов (например, подмножества ресурсов SPS). Например, WTRU может отправлять сообщение на eNB, чтобы освобождать специфический набор ресурсов SPS, связанных с конфигурацией SPS, но не освобождать всю конфигурацию. Например, WTRU может указывать, что ему не нужны (он не планирует использовать) ресурсы SPS, связанные со следующими X интервалами планирования SPS. Это позволяет eNB планировать эти ресурсы для использования другими WTRU. Через Х интервалов планирования WTRU может предполагать, что он снова имеет доступ к ресурсам SPS в соответствии с существующей конфигурацией SPS.
WTRU может отправлять указание об освобождении специфических ресурсов, используя один из следующих способов: новый CE MAC; новый специальный BSR, который может содержать приведенную выше информацию; SR, потенциально отправляемый на ресурс, предварительно определяемый для информирования eNB об этом событии, после передачи вышеуказанной информации с использованием BSR или CE MAC; PUCCH, потенциально отправляемый на ресурс, предварительно определяемый для информирования eNB об этом событии; новый CE MAC, но отправляемый в самом ресурсе SPS; RACH или аналогичная передача WTRU, выполняемая при следующем доступном ресурсе RACH; или сообщение RRC.
Предусматривают множество конфигураций SPS. В частности, предусматривают множество конфигураций SPS и активацию/деактивацию конфигураций, активацию и деактивацию которых могут выполнять динамически в режиме реального времени в соответствии с условиями и инициирующими событиями. Например, WTRU может быть выполнен с множеством конфигураций SPS, но может иметь только одну конфигурацию, активную в данный момент времени. Затем WTRU может запрашивать изменение (цикл) между одной конфигурацией и одной или более другими конфигурациями путем деактивации текущей активной конфигурации и активации другой конфигурации.
WTRU может принимать от eNB несколько конфигураций вместе с сообщением о реконфигурации соединения RRC. WTRU может принимать от eNB активную конфигурацию из предоставленных конфигураций. В альтернативном варианте осуществления от WTRU может потребоваться предположение, что ни одна из конфигураций не является активной, и вместо этого позднее указывать на eNB, какая конфигурация должна быть активной. WTRU может отправлять на eNB в сообщении активации/деактивации SPS идентификатор, связанный с конфигурацией SPS, для активации или деактивации соответствующей конфигурации SPS.
WTRU может отправлять сообщение или индикатор активации/деактивации конфигурации одним из следующих способов: новый CE MAC; новый специальный BSR, указывающий конфигурацию для активации/деактивации; SR, потенциально отправляемый на ресурс, предварительно определяемый для информирования eNB об этом событии; PUCCH, потенциально отправляемый на ресурс, который предварительно определен для информирования узла eNB об этом событии, и потенциально в котором специфический ресурс PUCCH, выбираемый модулем WTRU, может также указывать конфигурацию SPS для активации или деактивации; RACH или аналогичная передача WTRU, выполняемая при следующем доступном ресурсе RACH; сообщение RRC; или сообщение типа SRS, в котором местоположение ресурса SRS потенциально может также указывать конфигурацию SPS для активации или деактивации. Кроме того, местоположение SR может также указывать, какую конфигурацию SPS активировать/деактивировать.
WTRU может рассматривать запрашиваемую конфигурацию, активируемую после передачи сообщения об активации/деактивации. В альтернативном варианте осуществления WTRU может рассматривать запрашиваемую конфигурацию, активируемую после подтверждения узлом eNB, или посредством: ACK гибридного автоматического запроса на повторение передачи (HARQ) в PDU MAC, передающий CE MAC, явного сообщения RRC, или сообщения уровня PHY, например, сообщения PDCCH (например, PDCCH с C-RNTI SPS).
В варианте осуществления WTRU может отправлять новый CE MAC для активации одной конфигурации SPS при деактивации других конфигураций. Активация может вступать в силу в подкадре, в котором WTRU принимает C-RNTI SPS от eNB.
WTRU может потенциально использовать вышеупомянутые механизмы для деактивации всех конфигураций SPS на основе инициаторов от верхних уровней. Например, WTRU может принимать (например, от уровня адаптации) указание не использовать SPS.
Инициаторы запроса изменения конфигурации SPS включают: прикладной уровень, уровень адаптации или верхние уровни, указывающие, когда изменился период трафика (например, с 1 с до 100 мс или наоборот); прикладной уровень, уровень адаптации или верхние уровни, указывающие, что синхронизация (смещение) изменилась, какое новое смещение и что синхронизация изменилась на определенную величину (например, превышающую пороговое значение); и WTRU, определяющий, что одна конфигурация может быть лучше другой на основании информации, предоставляемой прикладным уровнем, уровнем адаптации или верхними уровнями.
Фиг. 8 представляет собой ряд инициирующих событий прикладного уровня по отношению к связи V2X. Например, изменение автономного режима может быть обнаружено, когда управление автомобилем переключают с ручного управления на электронное управление 802. Может оказаться желательным, чтобы для WTRU была назначена более высокая (или более низкая) периодичность SPS, так чтобы автономному автомобилю могла быть выделена более широкая полоса пропускания системы соответственно для передачи/приема информации. То же самое можно сказать об указании 804 «Водитель моложе 18 лет». Еще один пример инициирующего события включает в себя изменение возможности системы, которое может быть связано с обновлением прошивки автомобиля или WTRU. В некоторых случаях обновления программного обеспечения могут быть частыми. Добавление нового программного обеспечения или приложений также может приводить к изменению возможности системы.
Обеспечена приоритезация логических каналов, применяемых к предоставлению SPS. В частности, при передаче с использованием предоставления, связанного с определенной конфигурацией SPS, WTRU может выбирать данные из логических каналов, которые должны быть переданы с использованием этого предоставления. Выбор данных из логических каналов, подлежащих передаче, может быть основан на использовании комбинации следующих критериев, которые могут быть приоритезованы в любом порядке: передача данных с наивысшим приоритетом, основанным на PPPP; передача данных с уменьшением приоритета PPPP; передача данных, периодичность которых совпадает, меньше или больше, чем периодичность конфигурации SPS, связанной с предоставлением; передача данных, размер которых совпадает, меньше или больше, чем размер предоставления конфигурации SPS, связанной с предоставлением; передача данных на основе конфигурируемого сопоставления между данными/сервисом или логическим каналом более высокого уровня и конфигурацией SPS; задержка передачи данных, пока не будет принято предоставление для связанной конфигурации SPS; и количество времени до следующего предоставления, связанного со специфической конфигурацией SPS. Такой выбор можно применять независимо от того, имеет ли WTRU множество одновременно активных конфигураций SPS или одну активную конфигурацию SPS.
В одном примере WTRU может выбирать ресурс SPS с целью использования для передачи данных, поступающих с более высоких уровней, на основе конфигурации SPS от eNB. WTRU может принимать конфигурацию SPS, связанную с одним или более логических каналов, групп логических каналов, радиоканалов, PPPP, QCI и т.п.
WTRU может передавать только данные из одного или более логических каналов и т.п., используя предоставления SPS для конфигурации SPS, связанной с логическими каналами.
В альтернативном варианте осуществления WTRU может сначала передавать все данные из связанных логических каналов, а затем передавать любые оставшиеся данные (из потенциально других логических каналов, не связанных с конфигурацией SPS), если предоставление позволяет передавать дополнительные данные, но все данные в буферах связанных логических каналов могут быть переданы с использованием предоставления.
Кроме того, WTRU может сначала передавать все данные с приоритетом (например, приоритетом PPPP или группы логических каналов (LCG) (т.е. LCP)) более высоким, чем у сконфигурированного логического канала, связанного с конфигурацией SPS, перед передачей каких-либо данных из сконфигурированного логического канала. В альтернативном варианте осуществления WTRU может сначала рассматривать все данные, связанные с конфигурацией SPS, прежде чем рассматривать данные с более высоким приоритетом (например, приоритетом PPPP или LCG).
В другом примере WTRU может определять, какой ресурс SPS использовать на основе сконфигурированной периодичности и/или размера выделения ресурса SPS, а также информации от прикладного уровня. В этом случае WTRU может определять требуемый интервал передачи для определенного пакета прикладного уровня на основании информации прикладного уровня, включенной в пакет. Такая информация может быть в виде аналогичного QCI-параметра, указывающего требования к периодичности или синхронизации, прилагаемые к пакету. Он также может быть предоставлен WTRU в форме PPPP, где специфические PPPP могут быть использованы для указания данных со специфическим периодом передачи (например, трафик CAM).
При выборе данных, подлежащих передаче на ресурсе SPS, WTRU может идентифицировать периодичность, связанную с конфигурацией SPS, связанной со специфическим ресурсом SPS; выбирать PDU верхнего уровня, которые требуют согласованной периодичности для мультиплексирования в PDU MAC для передачи; если все данные из согласованной периодичности были включены, выбирать PDU верхнего уровня, которые требуют меньшей периодичности для мультиплексирования в PDU MAC для передачи; и если все вышеперечисленное включено, выбирать PDU верхнего уровня для любой периодичности или выбирать PDU верхнего уровня, не связанные с какой-либо специфической периодичностью или требованием синхронизации, для мультиплексирования в PDU MAC для передачи.
В другом примере WTRU может откладывать выбор PDU RLC для передачи до появления предоставления от связанной (сконфигурированной или основанной на определенном посредством WTRU сопоставлении) конфигурации SPS и выбирать этот PDU только после приема этого предоставления. В этом случае при выборе PDU RLC для передачи PDU MAC модуль WTRU может избегать выбора PDU RLC из логического канала (независимо от его приоритета) и выбирать PDU RLC из следующего наиболее высокого (по приоритету) логического канала для передачи. WTRU может также избегать выбора PDU при условии, что время до поступления следующего предоставления для связанной конфигурации SPS меньше, чем некоторое предварительно сконфигурированное пороговое значение. В противном случае WTRU может быть выполнен с возможностью передачи пакета с использованием прежнего механизма (например, используя текущее предоставление, полученное посредством прежнего механизма запроса предоставления).
Обеспечено управление одновременными предоставлениями SPS. В частности, WTRU может быть выполнен с множеством активных конфигураций SPS, так что предоставления из разных конфигураций SPS происходят одновременно. Это могут быть предоставления, происходящие в одном и том же подкадре UL (для передачи SPS UL) или в одном и том же периоде планирования (например, для передачи SPS прямого соединения (SL). SPS SL относится к SPS, конфигурируемому для связи типа устройство-устройство (D2D).
В одном примере от WTRU, сконфигурированного с одновременно происходящими предоставлениями SPS, могут требовать или ожидать передачи с использованием только одного из предоставлений. Это может иметь место, например, если eNB предполагает, что WTRU будет использовать только одно из сконфигурированных предоставлений и выделять ресурсы UL для других WTRU. Предоставление, которое должно быть использовано WTRU, может быть выбрано в соответствии с любым из следующих критериев.
Можно выбирать предоставление, которое имеет самый большой выделенный ресурс, например, исходя из блоков ресурса. Можно выбирать предоставление, у которого размер выделенного ресурса самый близкий к размеру данных, которые должны быть переданы модулем WTRU, например, передаваемых в BSR для WTRU. Потенциально в этом случае предоставление также должно быть больше или равно размеру данных, которые должны быть переданы модулем WTRU или указаны модулем WTRU в BSR. Можно выбирать предоставление с наилучшими свойствами канала (например, на основе измерений, выполненных WTRU или eNB). Может быть выбрано предоставление, для которого WTRU обнаружил, например, с помощью датчика, наличие наименьших помех от других передающих WTRU или наименьшего перекрытия (исходя из ресурсов) с ресурсами передачи, выбранными другим WTRU для одного и того же периода планирования.
В этом примере WTRU может дополнительно использовать рассмотренные выше правила для приоритезации логических каналов (LCP) для выбора данных, передаваемых посредством сконфигурированного и выбранного предоставления.
В другом примере от WTRU, выполненного с возможностью одновременно возникающих предоставлений SPS, могут требовать или ожидать передачи на все из предоставлений в данном периоде планирования или подкадре UL. В этом случае WTRU может дополнительно использовать рассмотренные выше правила для LCP для выбора данных, чтобы передавать одновременно происходящие предоставления. WTRU может также в этом случае выполнять LCP, следуя любому из приведенных ниже правил.
Например, WTRU может рассматривать сумму размеров одновременно происходящих предоставлений как доступный размер предоставления для передачи PDU MAC и выполнять LCP с учетом суммы размеров предоставлений. Дополнительно или в альтернативном варианте осуществления WTRU может выбирать предоставление, используемое для передачи PDU RLC, чтобы PDU RLC не нужно было сегментировать. Дополнительно или в альтернативном варианте осуществления WTRU может рассматривать каждое предоставление по отдельности и применять ранее упомянутые правила для LCP. Например, WTRU может выбирать только SDU RLC из логического канала, связанного с конфигурацией SPS, для передачи в том сконфигурированном предоставлении SPS.
WTRU может указывать, когда он не использует специфическое предоставление, чтобы eNB мог заново выполнять выделение при условии конфигурации множества предоставлений SPS. Например, если WTRU сконфигурирован с множеством предоставлений и использует только подмножество (например, одно) из сконфигурированных предоставлений SPS в специфическом подкадре, WTRU может быть выполнен с возможностью указания узлу eNB, какое предоставление он не будет использовать, чтобы eNB мог заново выделять ресурсы для другого устройства. В одном примере WTRU может сначала определять, какое предоставление он будет использовать, а затем передавать сигнал на eNB (например, используя физический или другой канал) о том, какое предоставление SPS он будет использовать (например, с помощью индекса). По этой информации eNB может определять, какое предоставление или предоставления SPS не используют, чтобы eNB мог заново выделять ресурсы другому устройству. Этот подход является преимущественным в случае множества сконфигурированных предоставлений SPS, а WTRU использует только одно из предоставлений SPS. В другом примере WTRU может быть выполнен с двумя предоставлениями SPS, и WTRU может указывать индекс предоставления SPS того предоставления SPS, которое он не намерен использовать (например, в случае отмены предоставления SPS). Чтобы указание стало действующим, может потребоваться, чтобы оно было передано в специфический момент времени до фактического поступления предоставления SPS.
Предусмотрено содействие со стороны верхних уровней для инициирования поддержки планирования SPS. Например, как уже было отмечено выше, WTRU может принимать информацию от верхних уровней (например, указание верхнего уровня о времени поступления сообщения, указание об изменении периодичности, указание об изменении синхронизации, сообщение, помеченное верхними уровнями с помощью тегов, информация на основе обеспечения модулем WTRU синхронизации с верхними уровнями и информация, связанная с изменениями динамики автомобиля). WTRU может определять необходимость в отправке на eNB изменения смещения или периодичности на основе информации с верхних уровней. Это может соответствовать информации с прикладного уровня или с уровня адаптации, варианты осуществления которых описаны ниже.
Далее описание будет посвящено информации, принимаемой с верхних уровней. Информация с верхних уровней может содержать указание верхнего уровня о времени поступления сообщения. Например, WTRU может принимать с прикладного уровня или верхних уровней указание о поступлении сообщения CAM. Такое указание может быть принято каждый раз, когда верхний уровень отправляет такое сообщение на AS.
Информация с верхних уровней может содержать указание об изменении периодичности. Например, WTRU может принимать с прикладного уровня или верхних уровней указание об изменении периодичности или интервала для сообщений CAM, а также новый период сообщения CAM.
Информация с верхних уровней может содержать указание об изменении синхронизации. Например, WTRU может принимать с прикладного уровня или верхних уровней указание о произошедшем изменении синхронизации сообщений CAM (или сообщений, требующих согласования SPS), определенном верхними уровнями. Это указание может также содержать абсолютное время новой синхронизации сообщений, передаваемых на нижние уровни (например, время передачи одного экземпляра потока периодических сообщений). В альтернативном варианте осуществления указание может быть отправлено для согласования передачи сообщения с новым временем (например, время указания указывает время сообщения).
Информация с верхних уровней может содержать сообщение, помеченное верхними уровнями с помощью тегов. Например, сообщение CAM или сообщение, требующее согласования SPS, может быть помечено тегами или указано как таковое верхними уровнями. Например, сообщение может быть помечено специфическим тегом конвергенции пакетных данных. Тип модуля служебных данных (SDU) с протоколом (PDCP), идентифицирующего сообщение как сообщение, требующее согласования SPS. Сообщение может содержать специфическое значение PPPP (согласно приоритету пакета), указывающее, что для этого сообщения требуется согласование SPS. Кроме того, это сообщение может быть принято с другой относящейся к QoS информацией, такой как QCI или подобная информация, где специфическое значение QCI может представлять потребность в согласовании SPS и/или связанные с синхронизацией требования, например, специфическое значение бюджета задержки пакета (PDB), представляющего требование задержки в 100 мс и/или периодические данные.
WTRU может быть дополнительно сконфигурирован посредством eNB, так что весь трафик или сообщения, требующие согласования с SPS, будут назначены определенному логическому каналу, радиопеленгатору и т.п. Такое ограничение может быть основано на информации с прикладного уровня, такой как QCI или PPPP. Например, WTRU может назначать все сообщения с определенным PPPP или QCI, указывая на необходимость согласования SPS с определенным логическим каналом.
Информация с верхних уровней может содержать информацию на основе обеспечения модулем WTRU синхронизации для верхних уровней. Например, WTRU потенциально после конфигурации SPS посредством eNB может предоставлять верхним уровням сконфигурированную синхронизацию SPS в любой из следующих форм: WTRU может предоставлять верхним уровням или прикладному уровню экземпляр абсолютного времени возникновения одного из ресурсов SPS; и/или WTRU может предоставлять в некоторых или каждом из случаев наличия ресурсов SPS указание или сигнал о наличии такого ресурса в AS. Прикладной уровень может дополнительно предоставлять указание нижним уровням о необходимости изменения синхронизации SPS в нынешней конфигурации и дополнительную информацию, необходимую для создания сообщения об изменении смещения для eNB (например, сдвиг во времени ресурсов SPS или схемы ресурсов, необходимый для согласования с генерацией текущих сообщений прикладного уровня).
Информация с верхних уровней может содержать информацию, связанную с изменениями динамики автомобиля. Например, AS может получать информацию, относящуюся к изменению динамики автомобиля, такую как: указание об изменении скорости, направления движения или ускорения, которое превышает пороговые значения инициирования событий, определенные в описанных в данном документе условиях (1) и (2); указание о наступлении инициирующего условия (1) или (2) (как описано выше); и/или указание о том, что скорость, направление или местоположение изменилось из состояния, при котором инициирующее условие (1) являлось истиной, в состояние, при котором оно не является истиной.
Как описано выше, размер CAM может периодически изменяться в зависимости от того, желает ли приложение V2X передавать высокочастотный контейнер, низкочастотный контейнер или другие специальные контейнеры. В результате этого фиксированное выделение SPS не идеально для предоставления ресурсов, необходимых для передачи CAM. Кроме того, eNB должен знать выделяемый размер SPS, необходимый для сообщения CAM, но эта информация присутствует только в WTRU (например, в автомобилях).
Соответственно, размер сообщения SPS может быть сконфигурирован посредством прикладного уровня. Например, приложение V2X в WRTU может предоставлять информацию о размере соответствующему приложению в сети или на eNB посредством сигнализации прикладного уровня, например, в качестве базового сервисного сообщения CA. Информация о размере, которая может быть отправлена с использованием сообщений прикладного уровня, может включать в себя: размеры контейнеров; схему отправки высокочастотных, низкочастотных или специальных контейнеров; и/или любое динамическое изменение схем, происходящее во время работы, например, когда WTRU V2X решает отправлять низкочастотный контейнер чаще, чем требуется.
Прикладной уровень в сети или eNB может предоставлять эту информацию на eNB для определения соответствующего выделяемого размера SPS и предоставлять любое дополнительное динамическое планирование для экземпляров времени, в которых необходимо увеличивать размер выделенного SPS, например, когда дополнительные контейнеры могут быть включены в обмен сообщениями CAM.
В другом примере размер сообщения SPS может быть связан с идентификатором класса качества (QCI) обслуживания (QoS) для логического канала. Например, требуемый выделяемый размер SPS и потенциально схема изменения размера сообщения CAM могут быть привязаны к QCI, связанному с логическим каналом V2X. Когда логический канал V2X установлен, eNB может знать или определять (например, на основе предварительно определенного сопоставления или из информации, полученной из службы приложения V2X в сети) необходимый выделяемый размер SPS, чтобы можно было хранить сообщения CAM.
WTRU может передавать сообщение синхронизации на eNB для указания времени и частоты передачи высокочастотного контейнера и низкочастотного контейнера, так что WTRU может знать или определять экземпляры времени, в которых необходимо увеличивать или переопределять выделения SPS посредством динамического выделения. Например, сообщение может указывать SFN и подкадр, соответствующие передаче низкочастотного контейнера, и что передача низкочастотных контейнеров происходит каждые X сообщений CAM.
В другом примере изменения выделяемого размера могут быть совмещены в передачах SPS. Например, WTRU может отправлять сообщение, указывающее, что следующее предстоящее сообщение CAM будет иметь увеличенный размер (например, будет содержать низкочастотный контейнер) и потенциально также повышенный размер по сравнению с текущим выделением SPS. Такое сообщение может быть совмещено как CE MAC в передаче текущего сообщения CAM. Преимущество этого решения по сравнению с динамическим планированием заключается в том, что WTRU не требуется отправка отдельного SR или BSR при поступлении большего сообщения CAM, и поэтому удается избегать дополнительных задержек (а также дополнительной сигнализации), связанных со способом SR/BSR.
В другом примере выделяемый размер SPS может быть периодически увеличен. Например, WTRU может быть выполнен с возможностью выделения SPS, которое периодически увеличивается за пределами выделения ресурса, указанного в PDCCH с C-RNTI SPS. Увеличение выделения ресурса может быть фиксированным (например, всегда в 2 раза выше выделения SPS) или оно может быть определено WTRU по сигналам, принятым от eNB. Например, сама конфигурация SPS в сигнализации RRC может содержать подробности увеличения выделения ресурса для SPS, информацию о том, как часто это происходит, и о связи дополнительных ресурсных элементов с обычным выделением SPS. В другом примере PDCCH с самим C-RNTI SPS, потенциально использующий новую DCI, может указывать величину увеличения выделения SPS и то, как часто это увеличение происходит, вместе с фактическим частотно-временным расположением увеличенного выделения.
Предусмотрен уровень адаптации управления SPS для сообщений CAM. Приложение V2X, которое управляет структурой и передачей сообщений CAM (и других сообщений V2X, таких как базовое сообщение безопасности (BSM) или сообщение децентрализованного уведомления среды (DENM)), может взаимодействовать с различными типами транспорта, такими как LTE (например, прямое соединение и Uu), а также специализированной связью на коротких расстояниях (DSRC). Поскольку требования к задержке должны быть выполнены независимо от используемого транспорта, с точки зрения реализации оптимальным может оказаться создание уровня адаптации, позволяющего приложению V2X взаимодействовать со специфическим транспортом при удовлетворении требований к задержке сообщения V2X без необходимости добавлять специфическую информацию о транспортном уровне в само приложение V2X.
Уровень адаптации V2X к LTE может обеспечивать следующие функции в отношении SPS: активация/деактивация SPS на основе того, оправдывает ли динамика автомобиля свое использование; и предоставление информации к AS для определения периода и синхронизации трафика SPS. Следует отметить, что функциональность, описанная для уровня адаптации, может находиться в пределах AS или прикладного уровня, в зависимости от специфической реализации WTRU или прикладного уровня, находящегося на WTRU.
Что касается активации/деактивации SPS для трафика CAM, то уровень адаптации может отправлять указание нижним уровням, чтобы указывать, когда может быть преимущественным конфигурировать SPS (например, когда трафик CAM является относительно периодическим). WTRU может дополнительно передавать это указание на eNB, чтобы активировать/деактивировать использование SPS (как описано выше).
Уровень адаптации может определять использование SPS (т.е. его активацию/деактивацию) на основании динамики автомобиля или другой информации, предоставляемой прикладным уровнем, такой как: превышает ли скорость автомобиля определенное пороговое значение (указывая на движение по автомагистрали), приближение автомобиля к другим транспортным средствам, движущимся в том же или противоположном направлении, информация глобальной системы позиционирования (GPS) об автомобиле, тип дороги, по которой движется WTRU, и/или информация о дорожном движении, такая как количество автомобилей в районе нахождения автомобиля или в направлении движения автомобиля.
На основании приведенной выше информации уровень адаптации может определять уровень периодичности сообщений CAM, генерируемых прикладным уровнем V2X, и может отправлять указание нижним уровням WTRU относительно того, следует ли выполнять конфигурацию SPS или нет.
В другом примере при выполнении указанного выше определения уровень адаптации может предоставлять указание аналогичному уровню адаптации в сети. Такой уровень адаптации в сети может предоставлять эту информацию (например, для специфического WTRU) непосредственно на eNB.
Чтобы определять периодичность SPS, уровень адаптации LTE может получать с прикладного уровня данные мгновенной скорости автомобиля. Такая скорость может быть периодически предоставлена уровню адаптации. В альтернативном варианте осуществления уровень адаптации LTE может принимать новое значение скорости или инициировать, когда изменение скорости превышает определенное пороговое значение. Уровень адаптации может определять требуемую периодичность SPS и информировать уровни AS о требуемой периодичности на основе простой таблицы соответствия. Например, периодичность x1 может быть сконфигурирована, когда скорость находится в диапазоне от y11 до y12, периодичность x2 может быть сконфигурирована, когда скорость находится в диапазоне от y21 до y22, и т.д.
Для определения синхронизации SPS уровень адаптации LTE может принимать с прикладного уровня инициаторы, соответствующие генерации CAM (т.е. инициирующие условия (1) и (2)), описанные выше. А именно: абсолютная разница в направлении превышает пороговое значение (например, 4 градуса), расстояние превышает пороговое значение (например, 4 м) и/или изменение скорости превышает пороговое значение (например, 0,5 м/с). Такие инициаторы могут быть получены с прикладного уровня с использованием отдельной сигнализации (например, побочной информации) или могут быть включены в само сообщение CAM.
Уровень адаптации LTE может быть предоставлен слоем AS с синхронизацией кадра и подкадра на основе любого из следующих способов: сигнал или событие, отправленное для каждого подкадра или интервала или подкадров, счетчик кадров и подкадров, поддерживаемый AS и считываемый/доступный для уровня адаптации LTE, и/или функция, предоставляемая слоем AS, переводящая абсолютное время (поддерживаемое в WTRU) во время кадра и подкадра. Уровень адаптации LTE может поддерживать точную синхронизацию, связанную с текущей конфигурацией SPS, на основе предыдущей активации SPS в AS. Точная синхронизация может быть поддержана на основе абсолютного времени или на основе синхронизации кадров/подкадров. В альтернативном варианте осуществления уровень адаптации LTE может принимать от AS абсолютное время текущей конфигурации сконфигурированной SPS (например, сконфигурированной узлом eNB) и текущей сконфигурированной периодичности. На основании этой информации уровень адаптации LTE может быть способен вычислять синхронизацию каждого ресурса SPS во времени.
Предусмотрена компенсация задержки AS. Например, уровень адаптации может обеспечивать AS с желаемой синхронизацией SPS. Такая синхронизация может включать в себя компенсацию задержки AS (например, с момента генерации сообщения CAM до момента его готовности к передаче по каналу беспроводной связи). Этот коэффициент компенсации может быть динамически обеспечен слоем AS. Этот коэффициент компенсации может быть определен уровнем адаптации LTE с использованием статического значения, связанного с требуемой задержкой. Например, при максимальной задержке 100 мс уровень адаптации LTE может быть сконфигурирован с коэффициентом компенсации 10 мс для учета задержки AS. Этот коэффициент компенсации может быть определен уровнем адаптации LTE на основе возможностей WTRU, сети и т.д., которые могут быть предоставлены в карте модуля идентификации абонента (SIM), хранилище/конфигурации WTRU, предоставляемой AS после подключения к сети, и/или предоставляемой сетью как часть сигнализации прикладного уровня или уровня NAS.
Несмотря на то что признаки и элементы описаны выше в конкретных комбинациях, специалисту в данной области будет очевидно, что каждый признак или элемент может быть использован отдельно или в любой комбинации с другими признаками и элементами. Кроме того, описанные в настоящем документе способы могут быть реализованы в компьютерной программе, программном обеспечении или программно-аппаратном обеспечении, встроенном в машиночитаемый носитель и предназначенном для исполнения компьютером или процессором. Примеры машиночитаемого носителя включают в себя электронные сигналы (передаваемые по проводным или беспроводным соединениям) и машиночитаемые носители информации. Примеры машиночитаемого носителя информации включают в себя, без ограничений, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), регистр, кэш-память, полупроводниковые устройства хранения данных, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD). Процессор в сочетании с программным обеспечением могут использовать для реализации радиочастотного приемопередатчика, предназначенного для применения в составе модуля WTRU, оборудования пользователя, терминала, базовой станции, контроллера RNC и/или любого главного компьютера.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ ЭФФЕКТИВНОГО ИСПОЛЬЗОВАНИЯ РЕСУРСОВ МЕЖДУ ВЗАИМОДЕЙСТВУЮЩИМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2019 |
|
RU2748541C1 |
| КАДРИРОВАНИЕ, ДИСПЕТЧЕРИЗАЦИЯ И СИНХРОНИЗАЦИЯ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2016 |
|
RU2694586C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛУПОСТОЯННЫМ ПЛАНИРОВАНИЕМ | 2017 |
|
RU2722424C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛУПОСТОЯННЫМ ПЛАНИРОВАНИЕМ | 2020 |
|
RU2735387C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛУПОСТОЯННЫМ ПЛАНИРОВАНИЕМ | 2017 |
|
RU2711952C1 |
| ПРИНУДИТЕЛЬНОЕ ВЫСВОБОЖДЕНИЕ И УПРАВЛЕНИЕ ДОСТУПОМ ПО ТИПУ УСТРОЙСТВО-УСТРОЙСТВО (D2D) | 2015 |
|
RU2700181C2 |
| ПРОЦЕДУРЫ ДЛЯ ОБЕСПЕЧЕНИЯ ВОЗМОЖНОСТИ ОДНОВРЕМЕННОЙ ПЕРЕДАЧИ РАЗНЫХ ТИПОВ | 2019 |
|
RU2782447C1 |
| ОБРАБОТКА ПЛОСКОСТИ ПОЛЬЗОВАТЕЛЯ В БЕСПРОВОДНЫХ СИСТЕМАХ | 2017 |
|
RU2711053C1 |
| УЛУЧШЕННОЕ ПОЛУПОСТОЯННОЕ РАСПРЕДЕЛЕНИЕ РЕСУРСОВ ДЛЯ ТРАФИКА V2V | 2016 |
|
RU2701117C1 |
| УЛУЧШЕННОЕ ПОЛУПОСТОЯННОЕ РАСПРЕДЕЛЕНИЕ РЕСУРСОВ ДЛЯ ТРАФИКА V2V | 2019 |
|
RU2719633C1 |
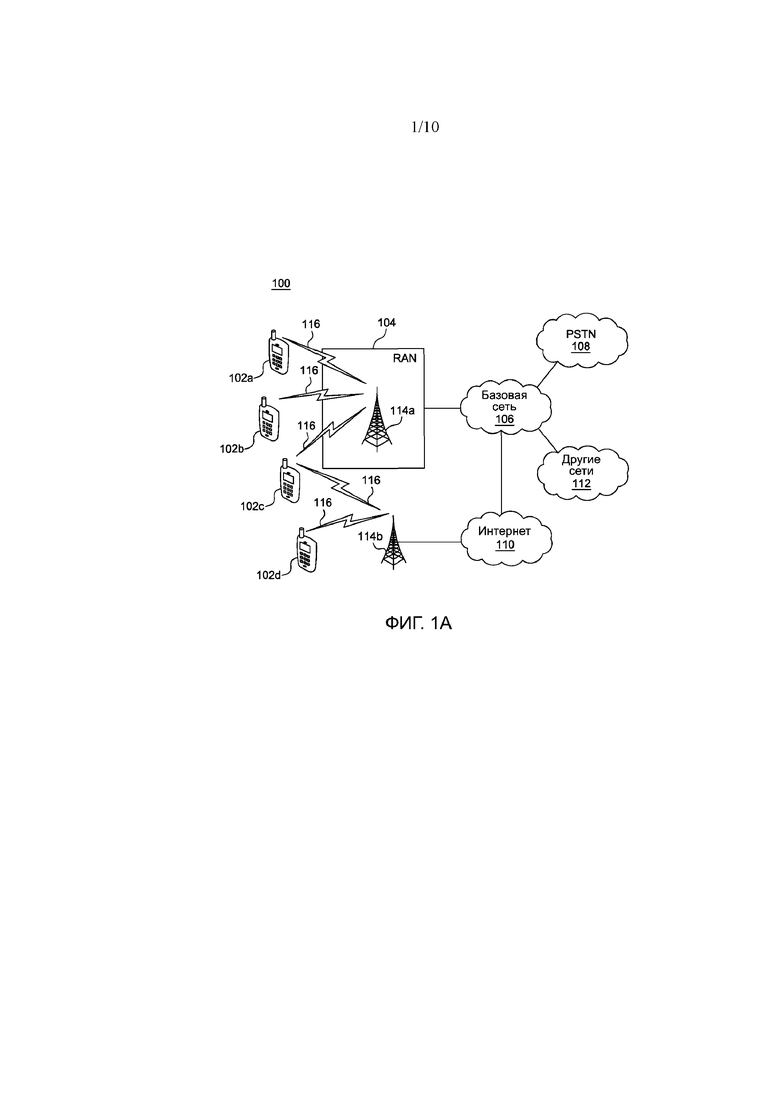
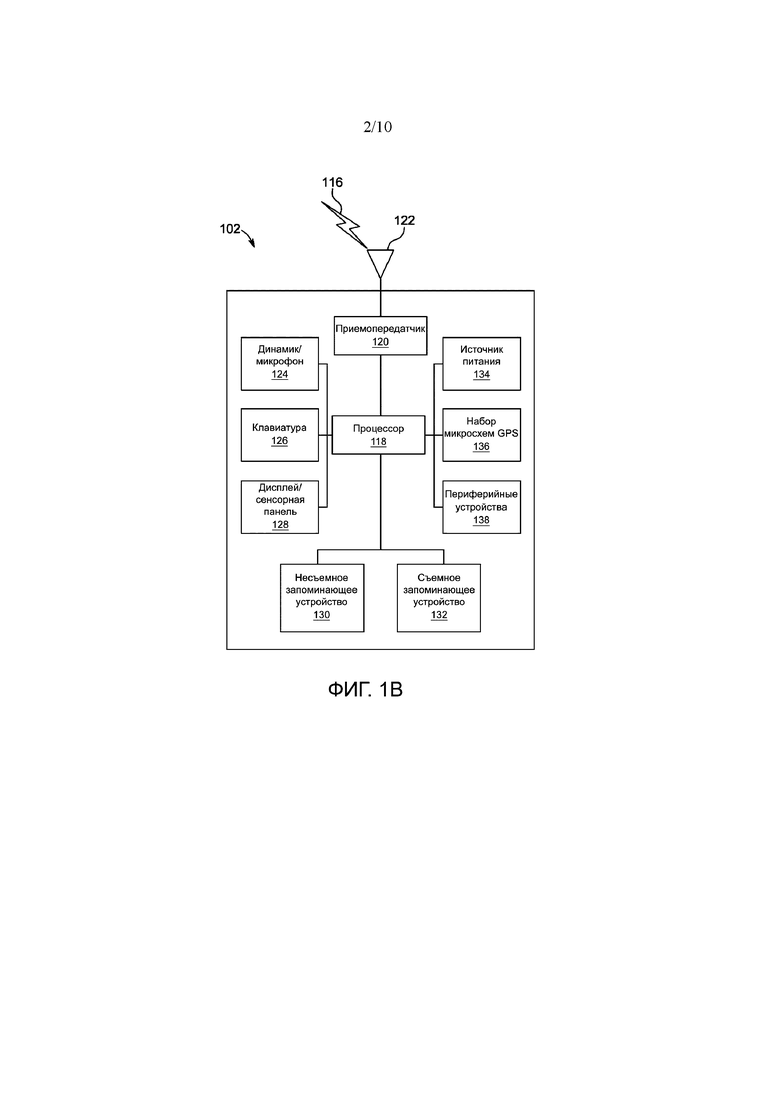
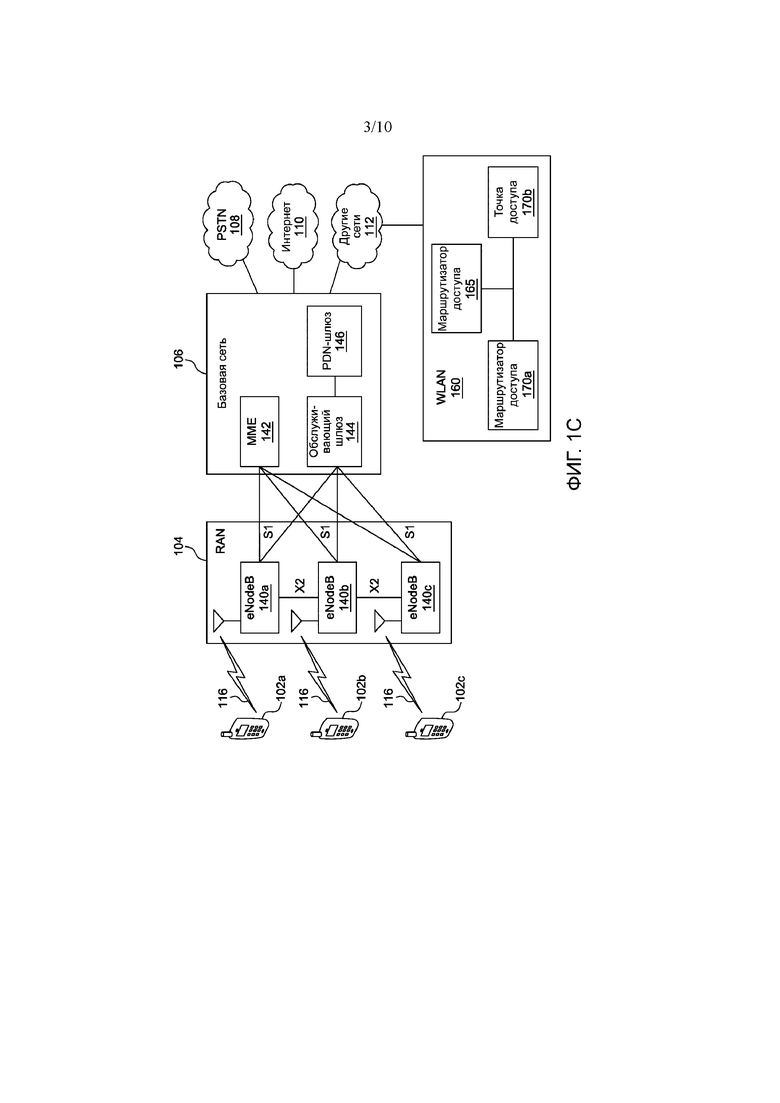
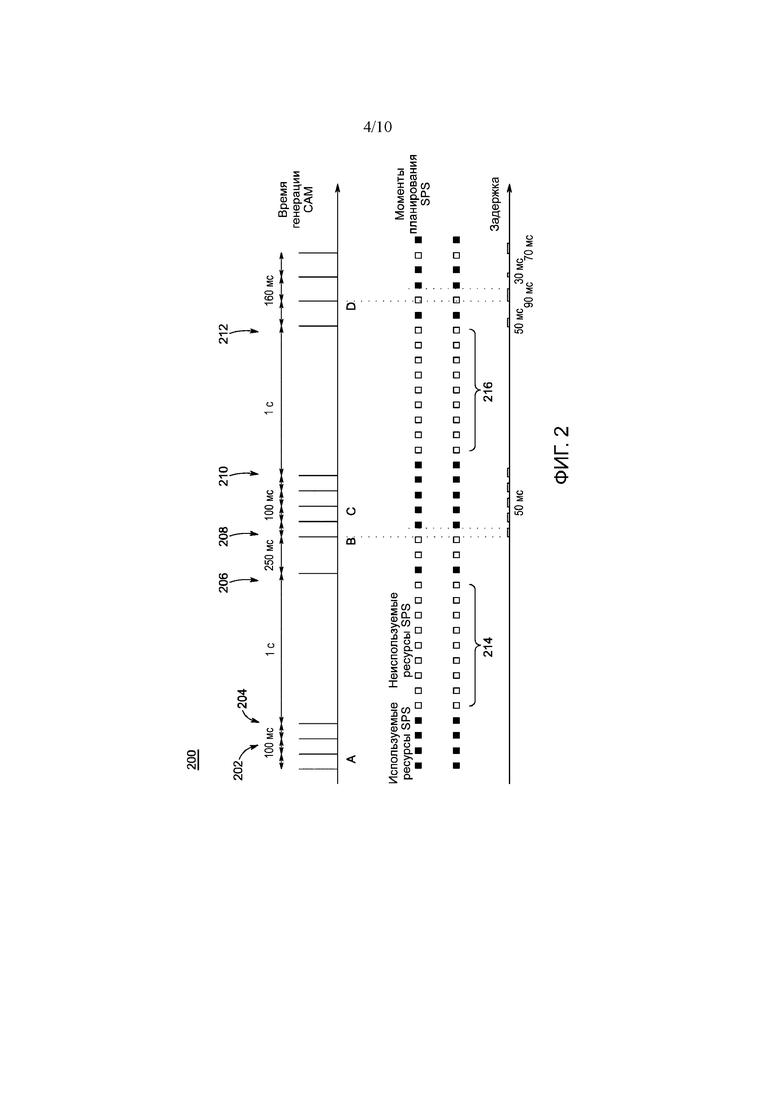
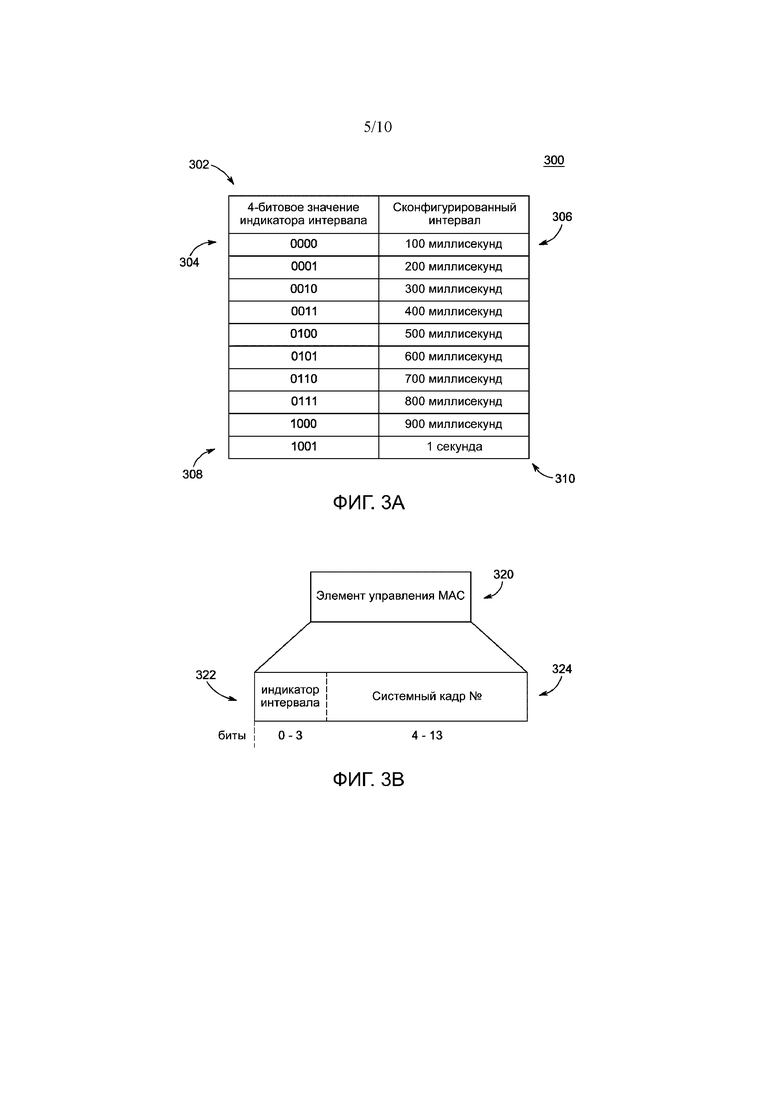
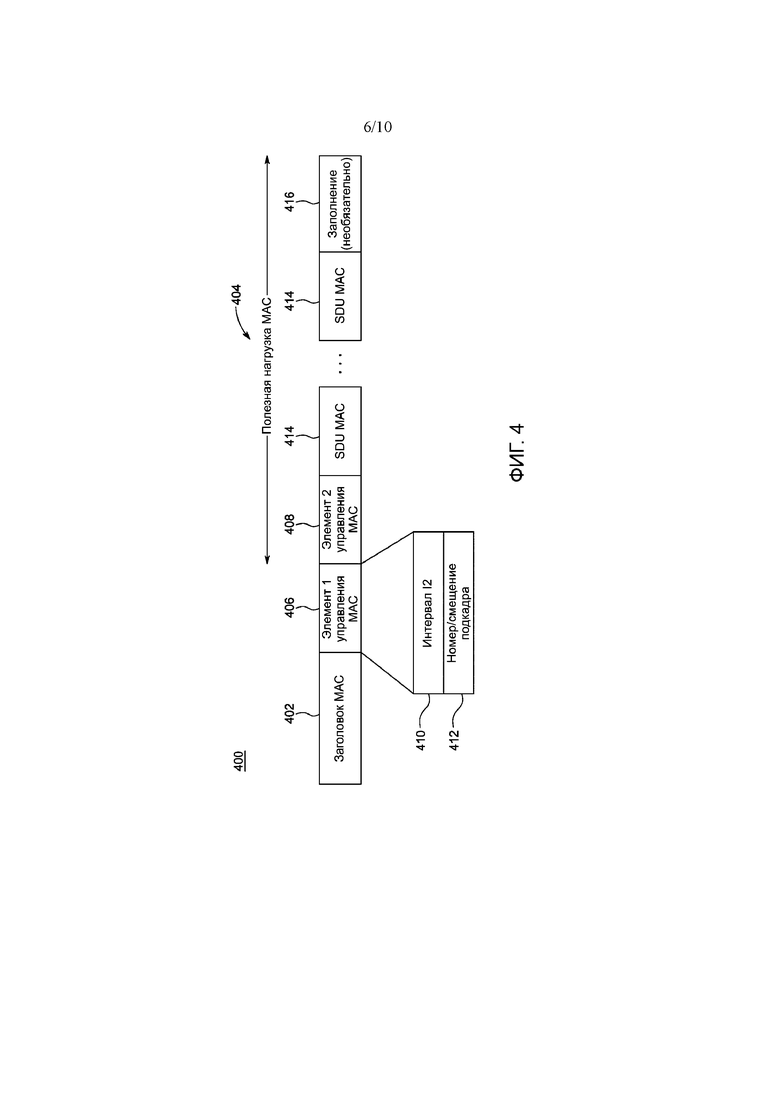
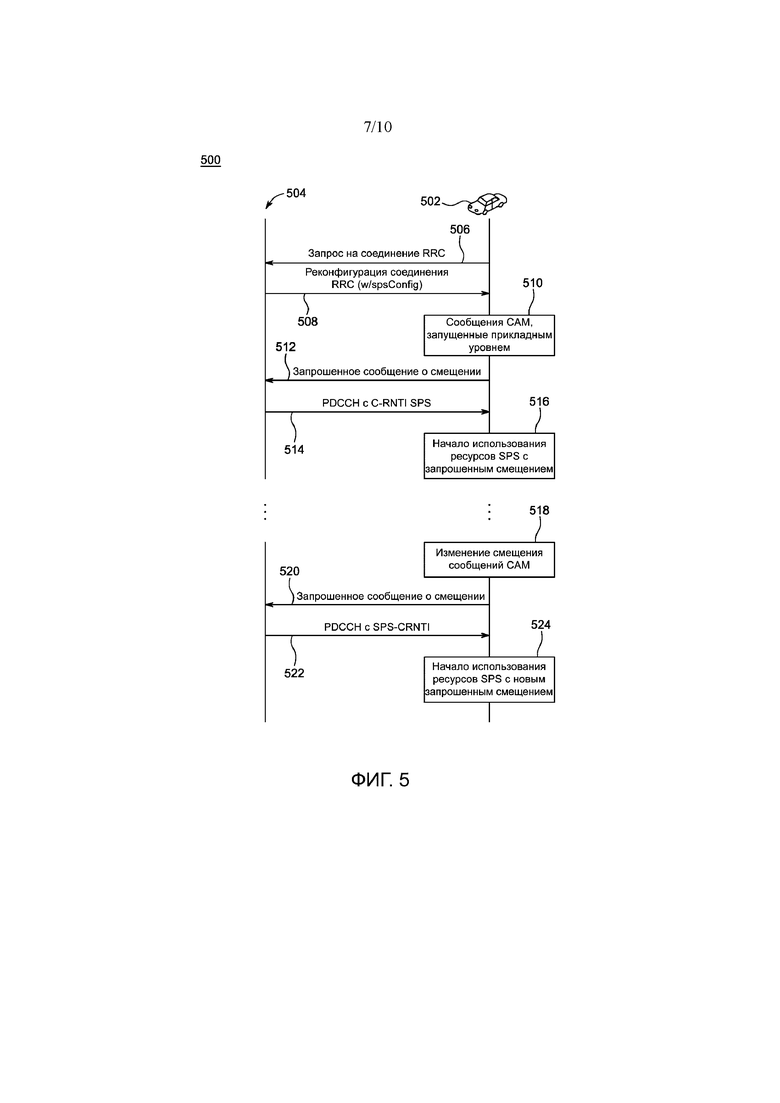
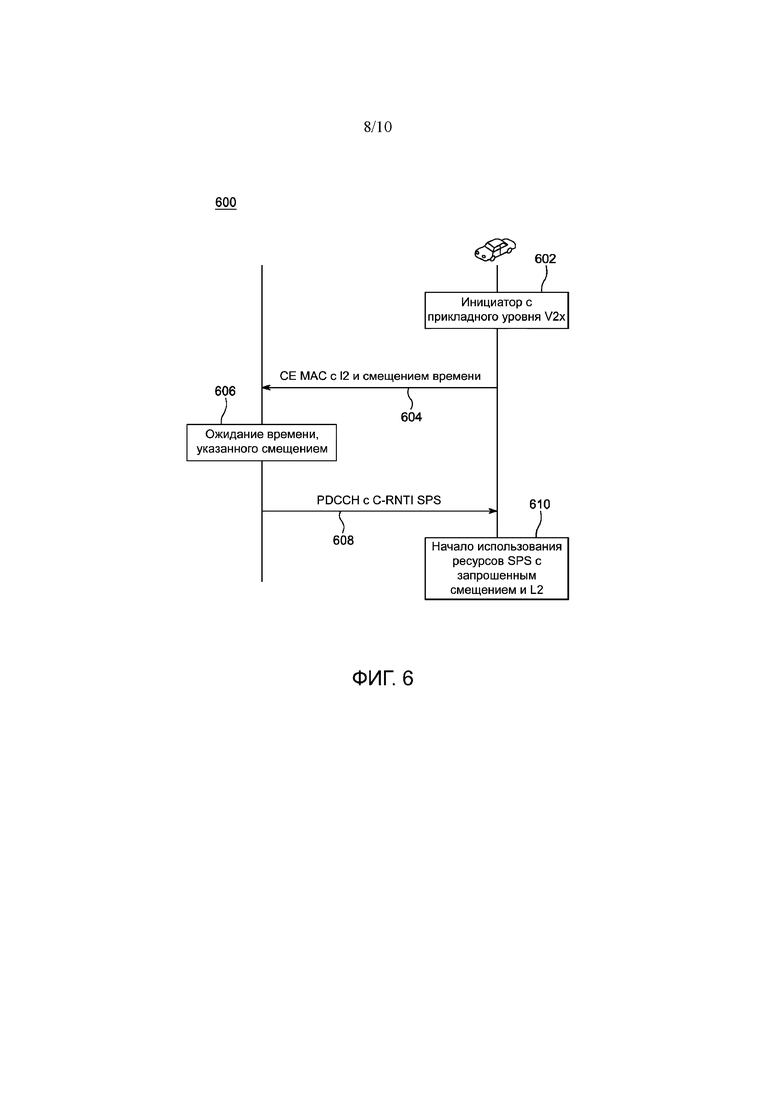
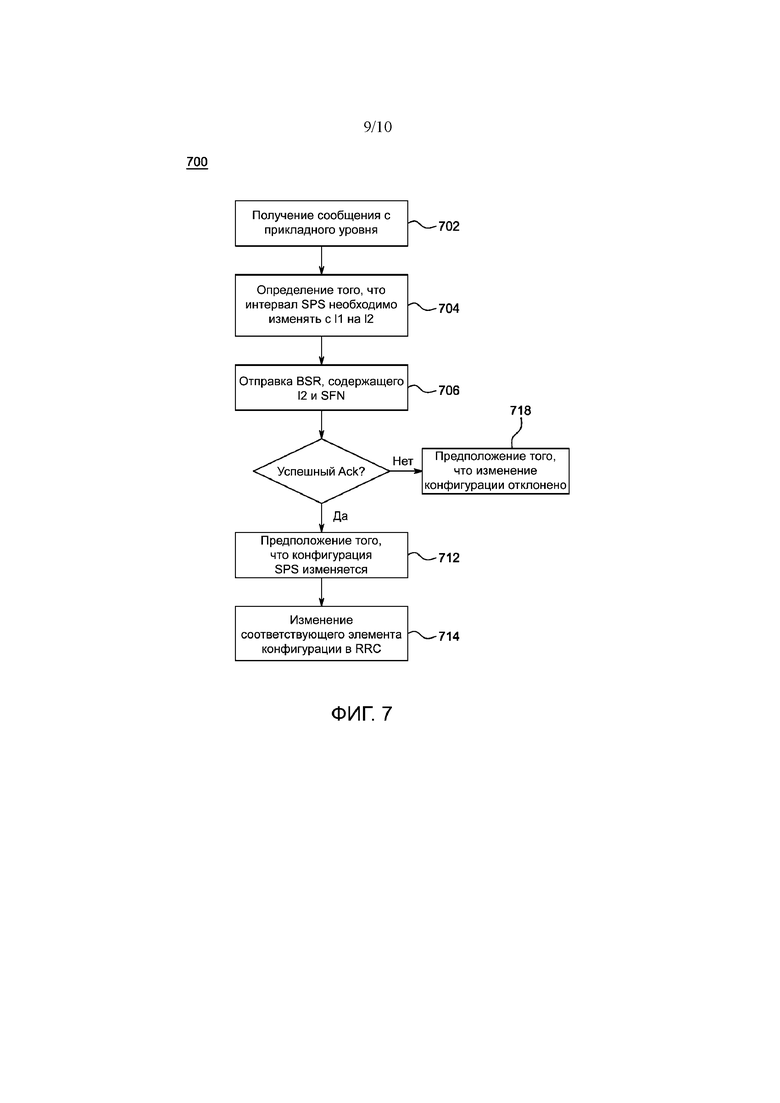
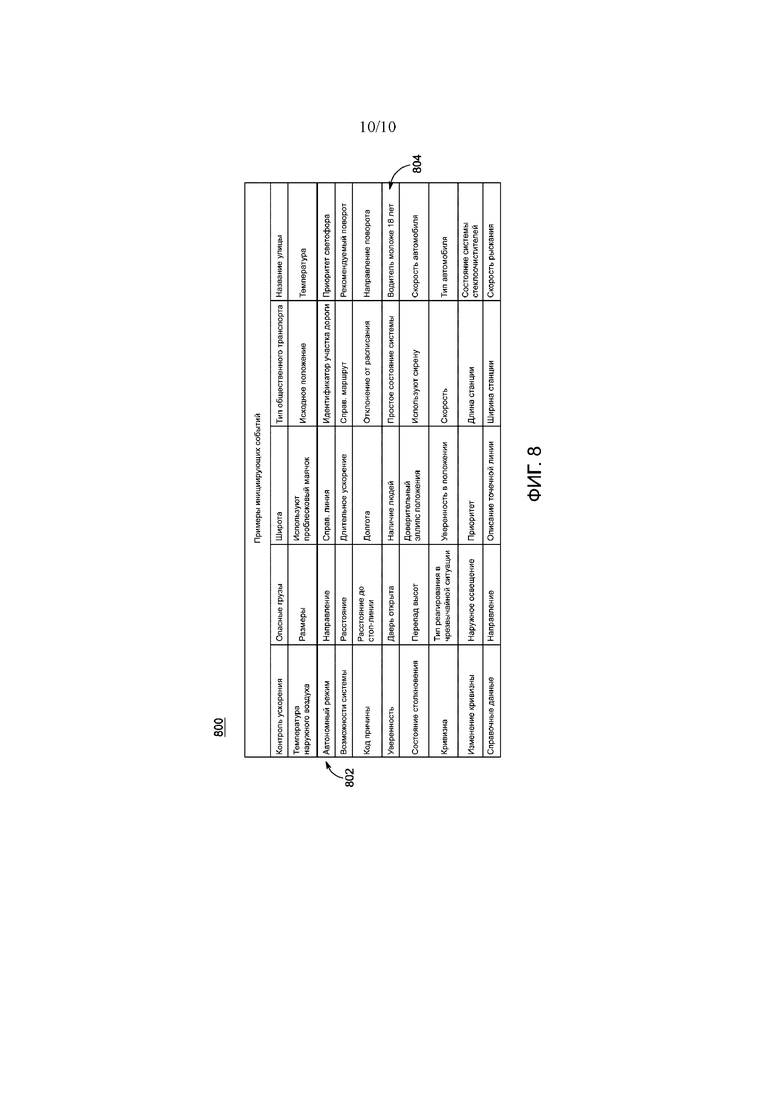
Изобретение относится к области беспроводной связи. Технический результат изобретения заключается в эффективном мультиплексировании различных типов сервисов, таких как передача речи и видео, для создания экономичных и высокопроизводительных систем связи для обеспечения общественной безопасности с помощью технологии LTE. Способ связи, осуществляемый модулем беспроводной передачи/приема (WTRU), включает передачу от модуля WTRU на расширенный узел B (eNB) запроса ресурсов полунепрерывного планирования (SPS), причем запрос ресурсов SPS включает периодичность запрашиваемых ресурсов SPS и временное смещение, указывающее время, в течение которого WTRU ожидает наличия выделенного ресурса SPS; прием модулем WTRU конфигурации SPS от eNB в ответ на передаваемый запрос ресурсов SPS и передачу модулем WTRU данных по каналу прямого соединения в соответствии с полученной конфигурацией SPS и приоритетом ProSe Per-Packet (PPPP). 3 н. и 17 з.п. ф-лы, 11 ил.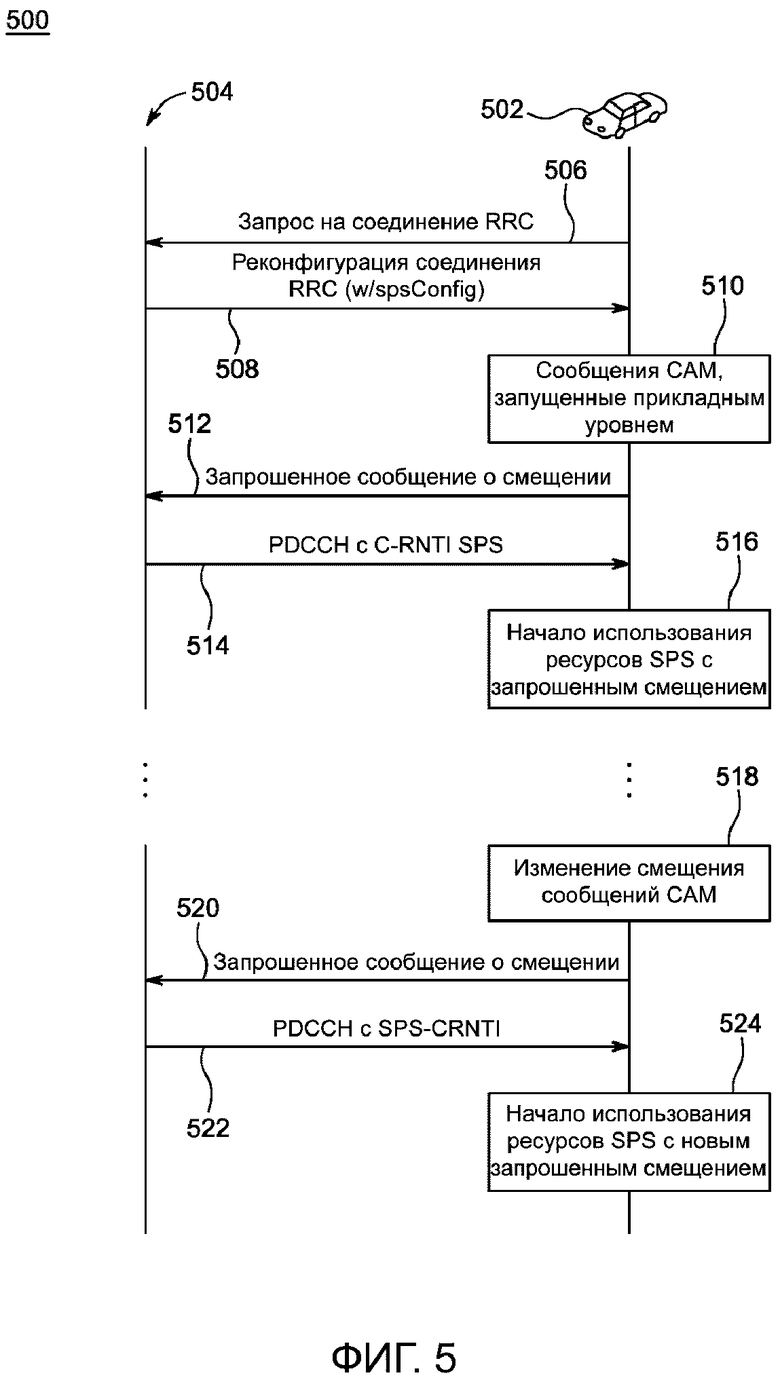
1. Способ связи, осуществляемый модулем беспроводной передачи/приема (WTRU), включающий:
передачу от модуля WTRU на расширенный узел B (eNB) запроса ресурсов полунепрерывного планирования (SPS), причем запрос ресурсов SPS включает периодичность запрашиваемых ресурсов SPS и временное смещение, указывающее время, в течение которого WTRU ожидает наличия выделенного ресурса SPS;
прием модулем WTRU конфигурации SPS от eNB в ответ на передаваемый запрос ресурсов SPS и
передачу модулем WTRU данных по каналу прямого соединения в соответствии с полученной конфигурацией SPS и приоритетом ProSe Per-Packet (PPPP).
2. Способ по п. 1, причем временное смещение передаваемого запроса включает смещение номера подкадра (SFN) относительно SFN 0 модуля WTRU.
3. Способ по п. 1, причем принимаемая конфигурация SPS соответствует интерфейсу PC5.
4. Способ по п. 1, причем конфигурацию SPS принимают по физическому каналу управления нисходящей линии связи (PDCCH).
5. Способ по п. 1, причем запрос включает индекс конфигурации SPS.
6. Способ по п. 1, дополнительно включающий:
передачу данных в соответствии с приоритетом логического канала (LCP).
7. Способ по п. 1, причем передаваемый запрос ресурсов SPS включает информационный элемент PPPP.
8. Модуль беспроводной передачи/приема (WTRU), содержащий:
передатчик, выполненный с возможностью передачи от модуля WTRU на расширенный узел B (eNB) запроса ресурсов полунепрерывного планирования (SPS), причем запрос ресурсов SPS включает периодичность запрашиваемых ресурсов SPS и временное смещение, указывающее время, в течение которого WTRU ожидает наличия выделенного ресурса SPS;
приемник, выполненный с возможностью приема модулем WTRU конфигурации SPS от eNB в ответ на передаваемый запрос ресурсов SPS; и
передатчик, дополнительно выполненный с возможностью передачи данных по каналу прямого соединения в соответствии с полученной конфигурацией SPS и приоритетом ProSe Per-Packet (PPPP).
9. Модуль WTRU по п. 8, причем временное смещение передаваемого запроса включает смещение номера подкадра (SFN) относительно SFN 0 модуля WTRU.
10. Модуль WTRU по п. 8, причем принимаемая конфигурация SPS соответствует интерфейсу PC5.
11. Модуль WTRU по п. 8, причем конфигурацию SPS принимают по физическому каналу управления нисходящей линии связи (PDCCH).
12. Модуль WTRU по п. 8, причем запрос включает индекс конфигурации SPS.
13. Модуль WTRU по п. 8, дополнительно содержащий:
передатчик, дополнительно выполненный с возможностью передачи данных в соответствии с приоритетом логического канала (LCP).
14. WTRU по п. 8, причем передаваемый запрос ресурсов SPS включает информационный элемент PPPP.
15. Способ связи, осуществляемый расширенным узлом B (eNB), включающий:
прием от модуля WTRU запроса ресурсов полунепрерывного планирования (SPS), причем запрос ресурсов SPS включает периодичность запрашиваемых ресурсов SPS и временное смещение, указывающее время, в течение которого WTRU ожидает наличия выделенного ресурса SPS; и
передачу конфигурации SPS на модуль WTRU в ответ на полученный запрос ресурсов SPS;
причем ресурсы SPS используют для передачи данных по каналу прямого соединения в соответствии с конфигурацией SPS и приоритетом ProSe Per-Packet (PPPP).
16. Способ по п. 15, причем временное смещение передаваемого запроса включает смещение номера подкадра (SFN) относительно SFN 0 модуля WTRU.
17. Способ по п. 15, причем принимаемая конфигурация SPS соответствует интерфейсу PC5.
18. Способ по п. 15, причем конфигурацию SPS принимают по физическому каналу управления нисходящей линии связи (PDCCH).
19. Способ по п. 15, причем запрос включает индекс конфигурации SPS.
20. Способ по п. 15, причем передаваемый запрос ресурсов SPS включает информационный элемент PPPP.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ НА БАЗОВОЙ СТАНЦИИ LTE ПУЛА РЕСУРСОВ, РАБОТАЮЩИХ В ОСНОВНОЙ ПОЛОСЕ ЧАСТОТ | 2011 |
|
RU2545187C1 |

