Настоящее изобретение относится к системе для выполнения операций, связанных с использованием электролизеров в установке для производства алюминия посредством огневого электролиза.
Изобретение также относится к модулю для эксплуатации электролизеров такой установки, при этом модуль содержит подобную систему, и к установке для производства алюминия посредством огневого электролиза.
Изобретение также относится к способу воздействия на электролизер такой установки.
Алюминий производят промышленным способом посредством огневого электролиза в электролизерах в соответствии с хорошо известным процессом Холла-Эру. В заявке на патент Франции FR 2 806 742 (соответствующей американскому патенту US 6 409 894) описаны установки электролизного цеха по производству алюминия, предназначенного для производства алюминия.
Электролитические реакции, вторичные реакции и высокие рабочие температуры приводят к получению газообразных выходящих потоков, которые содержат в основном диоксид углерода и фторированные продукты. Выделение данных выходящих потоков в атмосферу строго контролируется и регулируется с учетом не только окружающей атмосферы электролизного цеха по соображениям, связанным с условиями работы персонала, работающего рядом с электролизерами, но также с учетом загрязнения атмосферы. Нормативные акты ряда стран по охране окружающей среды накладывают ограничения на количества выбросов, выделяемых в атмосферу.
В настоящее время существуют решения, которые обеспечивают возможность надежного и успешного отвода, улавливания и обработки данных выходящих потоков. Широко распространенное решение состоит в оснащении электролизеров устройством для улавливания выходящих потоков. Данное устройство закрывает электролизные ванны подобно колпаку и содержит средства удерживания, которые, в частности, включают в себя закрывающее газоотводное средство и средства всасывания и химической обработки выходящих потоков.
Закрывающее газоотводное средство содержит съемные колпаки, которые обеспечивают доступ внутрь электролизера, в частности, при замене отработанного анода новым анодом. Доступ к внутреннему пространству электролизера также может быть необходимым во время других воздействий, таких как удаление жидкого металла, закрытие ванны или различные операции по техническому обслуживанию и текущему ремонту.
В соответствии с первым известным способом оператор, стоящий на земле, снимает колпаки с электролизера и заменяет их вручную по одному. При этом оператор подвергается рискам, связанным с близостью электролизера и наличием манипуляционного оборудования. В частности, положение, необходимое для подъема и опускания колпаков, требует, чтобы оператор наклонялся по направлению к электролизеру. Поскольку колпаки опираются на узкие поверхности, установка колпака в неправильном положении может привести к тому, что он будет плохо опираться на электролизер, что вызывает нарушение равновесия оператора и его возможное падение в электролизную ванну. С другой стороны, снятие колпаков приводит к снижению эффективности улавливающего устройства и подверганию оператора воздействию потоков, выходящих из электролизера, что требует ношения защитных масок.
Во втором известном процессе, который описан, например, в патенте Франции 2 879 582 (соответствующем патенту США № 8 273 223), колпаки снимают с электролизера и заменяют посредством системы, которая содержит:
- опору, предназначенную для ее монтажа на подвижном модуле установки так, чтобы она могла перемещаться над электролизерами;
- и первую шарнирно-сочлененную руку, смонтированную на опоре и снабженную устройством для захвата, по меньшей мере, одного колпака.
Перед размещением колпака на электролизере поверхность электролизеров, на которую колпак будет опираться, должна быть очищена. Куски затвердевшего расплава могли упасть на данную поверхность впроцессе замены анода, и наличие данных кусков помешает надлежащему размещению колпака в заданном положении. Для выполнения данной операции очистки система по документу FR 2 879 582 содержит вторую шарнирно-сочлененную руку, смонтированную на опоре и предусмотренную с инструментом для очистки, таким как щетка. Таким образом, колпак, находящийся в заданном положении на электролизере, снимают первой рукой, снабженной захватным устройством, затем вторая рука, снабженная инструментом для очистки, выполняет операцию очистки, пока колпак остается присоединенным к первой руке, и затем первая рука устанавливает колпак обратно на электролизер.
Такая система в целом является удовлетворительной. Однако она имеет ряд недостатков. В частности, она имеет довольно сложную и громоздкую конструкцию, которая может приводить к отрицательным последствиям при ее реализации и техническом обслуживании. Кроме того, данная система является относительно фиксированной, вследствие чего ее трудно адаптировать к различным видам колпаков и электролизеров и усовершенствовать ее так, чтобы она могла выполнять другие операции на электролизерах.
Задачей настоящего изобретения является преодоление недостатков предшествующего уровня техники, упомянутых выше.
Для этого и в соответствии с первым аспектом изобретение относится к системе для выполнения операций, связанных с эксплуатацией электролизеров установки для производства алюминия посредством огневого электролиза, включая операции манипулирования колпаками электролизеров, при этом система предназначена для ее монтажа на подвижном модуле установки так, чтобы она могла перемещаться над электролизерами, при этом система содержит:
- опору, предназначенную для ее монтажа на модуле;
- шарнирно-сочлененную руку, смонтированную на опоре;
- устройство для захвата, по меньшей мере, одного колпака, выполненное с возможностью присоединения к первому концу руки;
- и, помимо этого, устройство для временного хранения, по меньшей мере, одного колпака, при этом указанное устройство для хранения, смонтированное на опоре, выполнено с возможностью приема, по меньшей мере, одного колпака, перемещенного рукой, снабженной захватным устройством, и приспособлено для обеспечения возможности извлечения, по меньшей мере, одного колпака, ранее размещенного в устройстве для хранения, указанной рукой, снабженной захватным устройством.
Благодаря наличию устройства для хранения, смонтированного на опоре, не требуется, чтобы шарнирно-сочлененная рука постоянно удерживала колпаки во время выполнения операций, требующих снятия колпаков, (в частности, замены одного или более анодов) и операций перед установкой колпаков обратно на место (в частности, очистки определенных зон электролизера). Следовательно, шарнирно-сочлененная рука, свободная от колпаков, может быть использована для выполнения других операций и затем может извлекать колпаки, размещенные в устройстве для хранения, для установки их обратно на электролизере.
Таким образом, поскольку данная рука может выполнять различные операции, система может быть более компактной и менее дорогой в изготовлении и эксплуатации.
В частности, в соответствии с одним возможным вариантом осуществления может быть предусмотрено, что система будет содержать единственную шарнирно-сочлененную руку, смонтированную на опоре. Таким образом, достигается еще больший выигрыш с точки зрения компактности.
Рука может быть специально предназначена для операций манипулирования колпаками и для очистки зон электролизера, на которых размещают колпаки. Кроме того, она может быть предназначена для выполнения других операций, в результате чего повышается эксплуатационная гибкость системы при сохранении по существу неизменной компактности.
В качестве альтернативы также может быть предусмотрено, что система будет включать в себя дополнительную руку для операций, отличных от вышеупомянутых манипулирования колпаками и очистки, в частности, если данные другие операции требуют особых функциональных возможностей или конструкции руки, выполняющей их.
В соответствии с одним возможным вариантом осуществления система дополнительно содержит устройство для хранения инструментов, включая, по меньшей мере, захватное устройство и инструмент для очистки, при этом устройство для хранения, смонтированное на опоре, выполнено с возможностью приема, по меньшей мере, одного инструмента, подаваемого рукой, и с возможностью захвата одного из инструментов, размещенных в устройстве для хранения, указанной рукой.
При данной конструкции рука может быть снабжена только инструментом, необходимым для выполнения текущей операции, в то время как остальные инструменты в течение этого времени будут размещены в устройстве для хранения. В частности, очистка может выполняться рукой, не несущей захватного устройства, что делает ее более практически целесообразной и эффективной во время операции очистки.
Кроме того, наличие устройства для хранения обеспечивает эксплуатационную гибкость системы при очень хороших условиях работы. Действительно, инструменты остаются в системе и не размещаются, например, на полу установки, в результате чего обеспечивают экономию пространства пола и избегают нежелательного перемещения инструмента и трудностей в определении его местоположения с тем, чтобы рука могла его извлечь.
Опора может содержать основание, на котором неподвижно смонтировано следующее: рука, устройство для временного хранения, по меньшей мере, одного колпака и устройство для хранения инструментов в случае его наличия. Таким образом, рука и оба устройства для хранения размещаются в одном и том же «репозитории», так что отсутствует необходимость в выполнении устройства обнаружения с тем, чтобы рука могла правильно захватывать - или находить/извлекать - один или более хранящихся колпаков или хранящийся инструмент.
Может быть предусмотрено, что первый конец руки будет снабжен первыми соединительными средствами и что захватное устройство или любой другой инструмент, который может быть присоединен к первому концу руки, будет снабжено/снабжен вторыми соединительными средствами, выполненными с возможностью взаимодействия с первыми соединительными средствами с возможностью разъединения. В частности, вторые соединительные средства могут быть идентичными на всех инструментах, так что получают «универсальную» систему соединения. Соединение обеспечивает удерживание инструмента на руке в плане обеспечения механического соединения, но также в плане обеспечения электрического и/или пневматического или гидравлического соединения для передачи энергии и команд по приведению в действие.
Вторые соединительные средства предпочтительно доступны, когда инструмент размещен в устройстве для хранения, так что первый конец руки может приблизиться к ним, и вторые соединительные средства могут взаимодействовать с первыми соединительными средствами.
Устройство для временного хранения, по меньшей мере, одного колпака может быть выполнено с возможностью приема множества колпаков, размещаемых по существу в одной и той же вертикальной плоскости при их по существу горизонтальных боковых краях, при этом колпаки будут расположены друг над другом по существу непрерывно в вертикальном направлении. Это создает возможность того, что любой зазор, который мог существовать между колпаками перед их снятием с электролизера, будет устранен под действием силы тяжести. Следовательно, габаритный размер всего комплекта колпаков будет меньше, чем пространство, в котором данный комплект должен быть размещен обратно, что облегчает установку колпаков обратно на место.
В одном возможном варианте осуществления устройство для временного хранения, по меньшей мере, одного колпака содержит элемент, выполненный с возможностью перемещения между открытым положением, обеспечивающим возможность ввода, по меньшей мере, одного колпака в указанное устройство для хранения или удаления, по меньшей мере, одного колпака из указанного устройства для хранения, и закрытым положением, в котором колпак (-и) удерживается (-ются) в указанном устройстве для хранения.
Система может дополнительно содержать устройство обнаружения, выполненное с возможностью определения точного положения колпака на электролизере перед его захватом рукой и выполненное с возможностью обнаружения элемента рядом с местом электролизера, в котором колпак должен быть повторно установлен рукой в заданном положении, для обеспечения возможности надлежащей повторной установки указанного колпака в заданном положении. Эти две функции могут выполняться одним и тем же устройством обнаружения или двумя отдельными элементами устройства обнаружения. Например, устройство обнаружения может включать в себя, по меньшей мере, телеметрическую систему, такую как лазерное устройство для измерения расстояний.
Опора может содержать, по меньшей мере, один компонент, который выполнен с возможностью перемещения по существу в вертикальном направлении при эксплуатации и на котором смонтирована рука. Данный компонент, подвижный по отношению к модулю, на котором смонтирована опора, как правило, может представлять собой основание. Рука зафиксирована, например, посредством ее второго конца на нижней части опоры.
Таким образом, указанный подвижный компонент опоры может быть поднят так, что система и, в частности, рука не будут мешать остальным операциям, которые должны быть выполнены на электролизере, и/или так, что они не будут касаться компонента электролизера (анодного/«положительного» стояка, верхней части конструкции и т.д.), когда модуль должен быть перемещен.
В соответствии со вторым аспектом изобретение относится к модулю для эксплуатации электролизеров установки для производства алюминия посредством огневого электролиза, при этом модуль содержит:
- передвижной кран, который содержит две балки, проходящие в поперечном направлении, и который выполнен с возможностью перемещения в продольном направлении над электролизерами;
- каретку, смонтированную с возможностью перемещения в поперечном направлении на двух балках передвижного крана;
- и систему, подобную описанной выше, при этом опора системы смонтирована на каретке.
В соответствии с третьим аспектом изобретение относится к установке для производства алюминия посредством огневого электролиза, содержащей:
- сооружение, в котором размещено множество электролизеров, при этом каждый электролизер проходит в поперечном направлении, при этом электролизеры расположены рядом друг с другом в продольном направлении;
- модуль, подобный описанному выше, при этом передвижной кран смонтирован с возможностью перемещения в продольном направлении на продольных направляющих, предусмотренных вблизи двух поперечных торцевых стен сооружения.
В соответствии с четвертым аспектом изобретение относится к способу воздействия на электролизер установки для производства алюминия посредством огневого электролиза, включающему - в данном порядке - следующие этапы:
а) захватить, по меньшей мере, один колпак, имеющийся на электролизере, используя шарнирно-сочлененную руку, смонтированную на опоре и снабженную устройством для захвата, по меньшей мере, одного колпака;
b) используя указанную руку, разместить колпак (-и) в устройстве для временного хранения, по меньшей мере, одного колпака, смонтированном на опоре, затем разъединить захватное устройство и колпак (-и) для освобождения руки;
с) посредством указанной руки извлечь, по меньшей мере, один колпак, ранее размещенный в устройстве для хранения;
d) разместить указанный (-е) колпак (-и) обратно на электролизере посредством указанной руки.
Таким образом, после этапа b) рука будет свободна от колпаков и может выполнять другие операции.
Способ может дополнительно включать между этапами b) и с) и - в данном порядке - следующие этапы:
- используя указанную руку, то есть руку, которая выполняет операции а)-d) манипулирования колпаками, разместить захватное устройство в устройстве для хранения инструментов, смонтированном на опоре;
- присоединить к указанной руке инструмент, отличный от захватного устройства, имеющийся в устройстве для хранения;
- выполнить операцию указанным инструментом;
- разместить указанный инструмент обратно в устройстве для хранения;
- присоединить захватное устройства обратно к указанной руке.
Как правило, указанный инструмент, отличный от захватного устройства, может представлять собой инструмент для очистки, такой как щетка, при этом операция, выполняемая указанным инструментом, следовательно, представляет собой операцию очистки, по меньшей мере, одной зоны электролизера.
В дальнейшем вариант осуществления изобретения будет описан в качестве неограничивающего примера со ссылкой на приложенные чертежиб на которых:
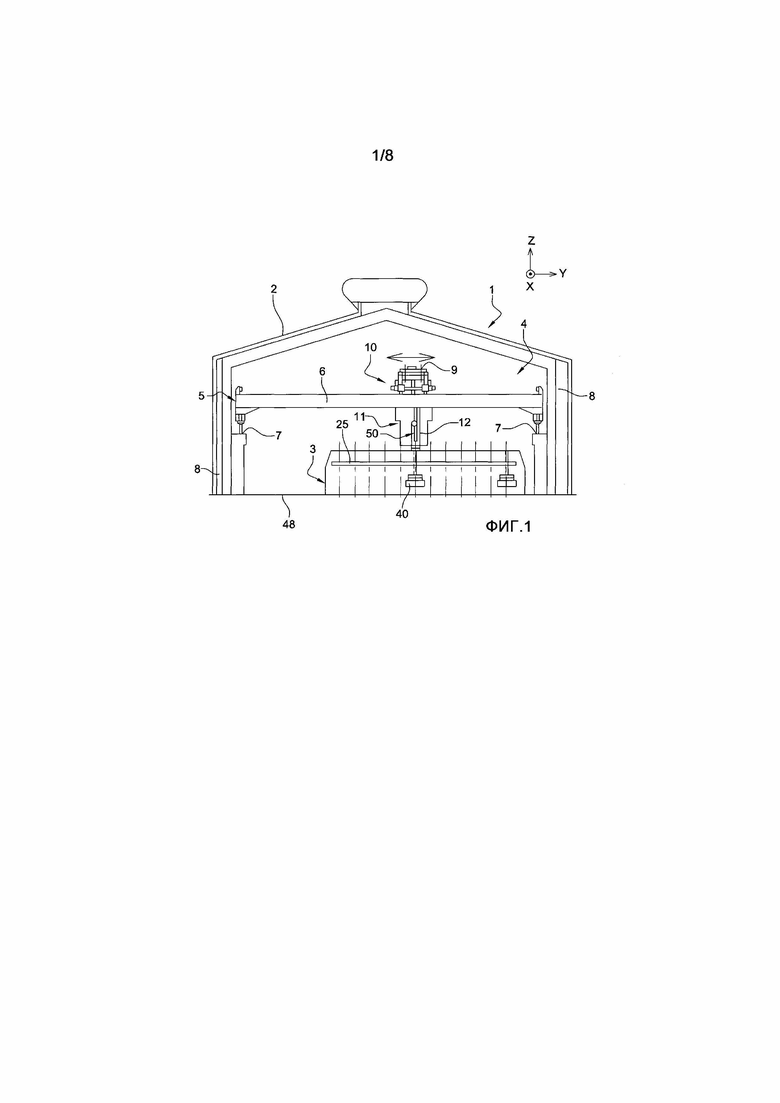
фиг.1 представляет собой схематический вид в разрезе установки для производства алюминия, в которой используется электролиз расплава и которая содержит систему в соответствии с изобретением;
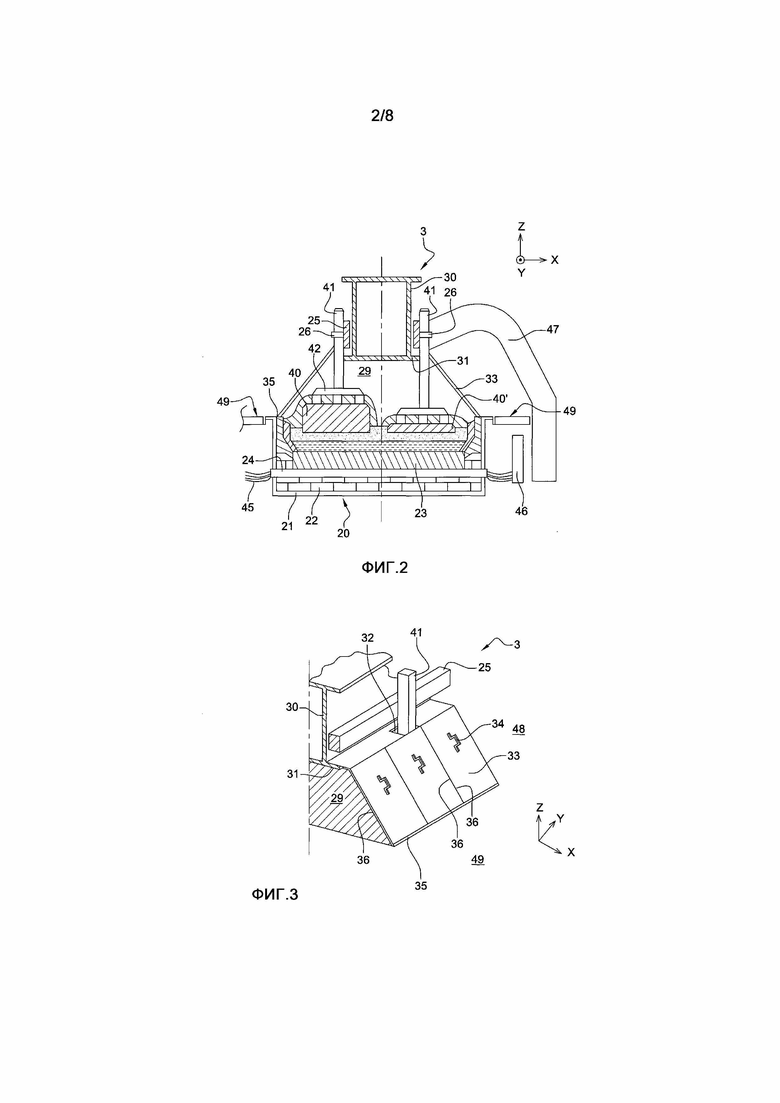
фиг.2 представляет собой схематический вид в разрезе электролизера установки;
фиг.3 показывает на виде в изометрии часть электролизера по фиг.2;
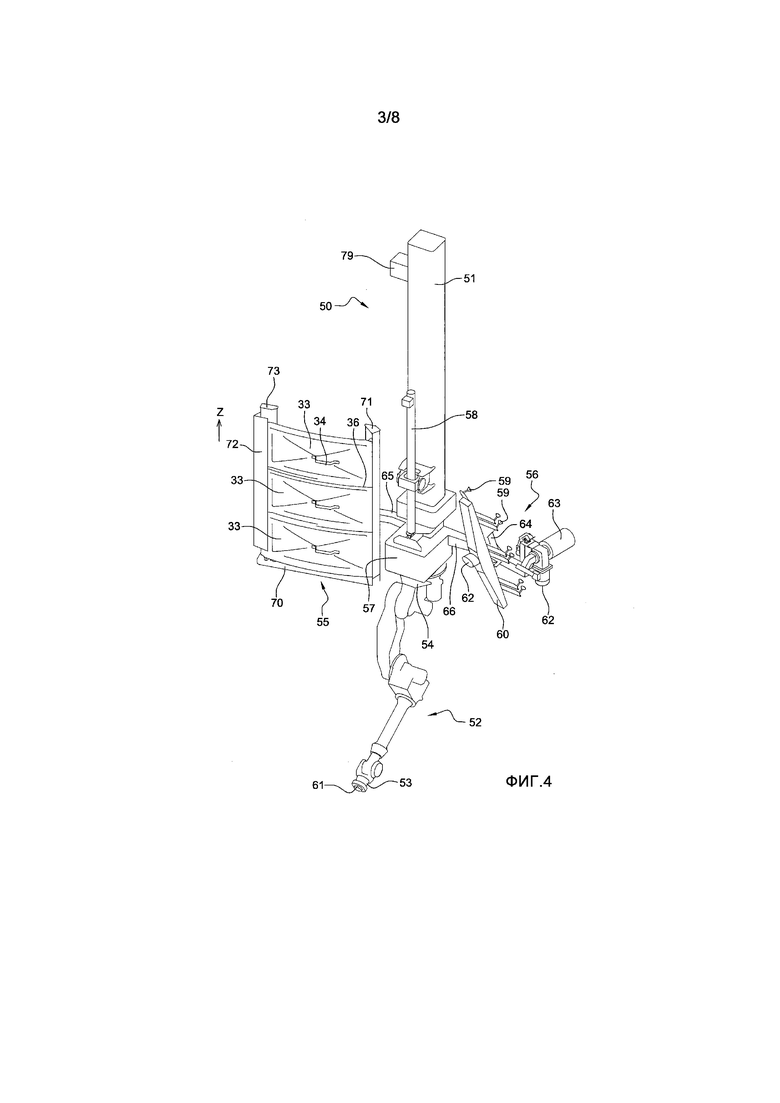
фиг.4 представляет собой вид в изометрии системы в соответствии с одним вариантом осуществления изобретения;
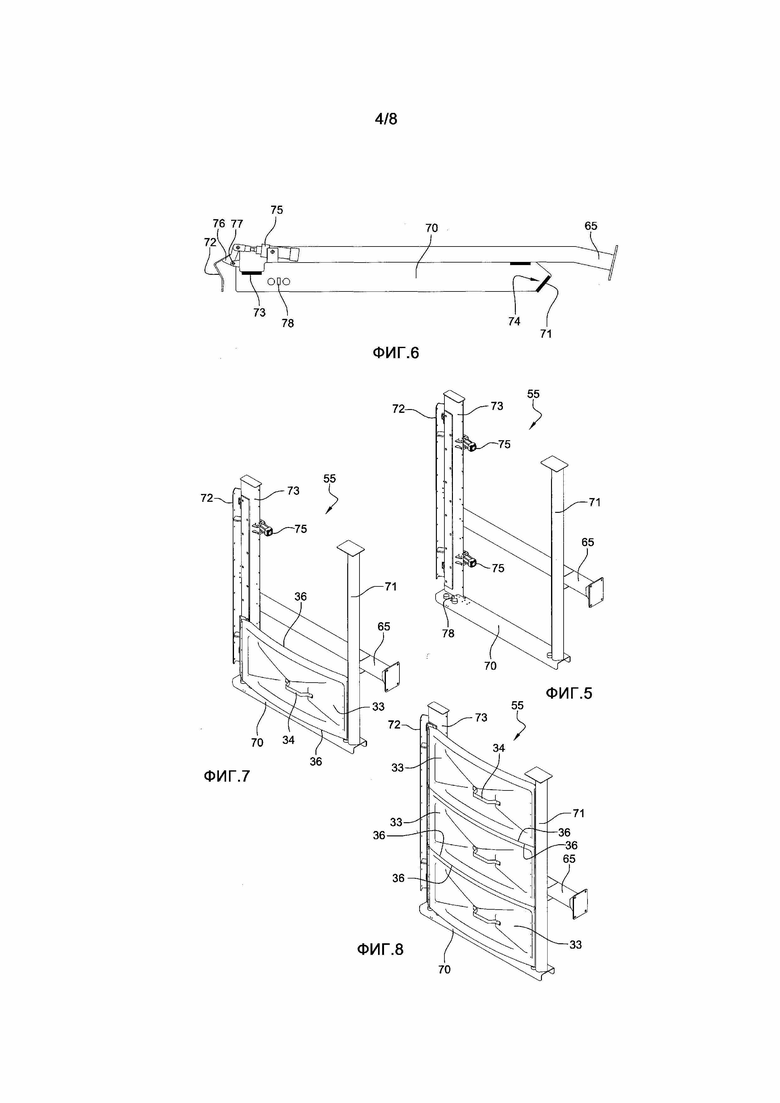
фиг.5 и 6 представляют собой изображения устройства для временного хранения колпаков электролизеров, принадлежащего системе по фиг.4, соответственно на виде в изометрии и виде сверху, при этом устройство для хранения является пустым;
фиг.7 и 8 представляют собой виды, аналогичные фиг.5, при этом устройство для хранения принимает соответственно один колпак и три колпака;
фиг.9-16 иллюстрируют следующие друг за другом этапы процесса воздействия на электролизер в соответствии с изобретением при использовании системы, показанной на фиг.4.
Фиг.1 показывает установку 1 для производства алюминия, в которой используется электролиз расплава, и, в частности, электролизный цех такой установки 1.
Установка 1 содержит сооружение 2, в котором размещено множество электролизеров 3. Каждый электролизер 3 проходит в поперечном направлении Y, и электролизеры 3 расположены рядом друг с другом в продольном направлении Х.
Как проиллюстрировано на фиг.2 и 3, каждый электролизер 3 содержит электролизную ванну 20, опорную конструкцию 30, называемую «верхней частью конструкции», и множество анодов 40, 40'.
Электролизная ванна 20 содержит стальной кожух 21, внутреннюю футеровку 22, которая, как правило, образована блоками, выполненными из огнеупорных материалов, и катодный комплект, который содержит блоки, выполненные из углеродистого материала, называемые «катодными блоками» 23, и металлические соединительные шины 24, к котором прикреплены проводники 45, 46, 47 для подвода тока электролиза.
Каждый анод 40 снабжен металлической штангой 41, которая, как правило, прикреплена к аноду 40 посредством мультипода 42. Аноды 40 прикреплены с возможностью съема к подвижной металлической раме 25, называемой «анодной рамой», посредством подвижного соединителя 26. Анодная рама 25 опирается на верхнюю часть 30 конструкции и присоединена к проводникам 47, называемым «анодными/«положительными» стояками», используемым для подвода тока электролиза.
В сущности говоря, более ста электролизеров 3 расположены рядом друг с другом в виде рядов или линий в направлении Х. Электролизеры 3 одного ряда электрически соединены последовательно посредством использования соединительных проводников 45, 46, 47. Электролизеры 3 расположены так, чтобы оставить проход 48 для циркуляции вдоль установки 1 и пространство 49 для доступа между электролизерами 3.
Каждый электролизер 3 снабжен системой колпаков. Система содержит ряд съемных колпаков 33, которые, как правило, выполнены из металла и в более типичном случае выполнены из алюминиевого сплава. Система колпаков удерживает выходящие потоки во внутреннем пространстве 29 электролизера 3 и соединена с средствами (непоказанными) для выпуска выходящих потоков и направления их в центр обработки.
Колпаки 33, как правило, вставлены в направляющую канавку 35, расположенную вдоль электролизера 3 (в направлении Y), и переведены в положение, в котором они опираются на фланец 31 верхней части 30 конструкции. Колпаки 33 расположены рядом друг с другом в направлении Y на электролизере 3. Между боковыми краями 36 двух соседних колпаков 33 может иметься зазор, составляющий порядка приблизительно 2-5 мм. С другой стороны, колпаки могут быть расположены с угловым дефектом, составляющим несколько градусов относительно осей Х и Y. Например, размеры колпака 33 могут быть следующими: ширина (вдоль оси Y) составляет 685 мм и высота составляет 1535 мм. Колпаки 33 могут быть по существу плоскими или изогнутыми. Колпаки 33 удерживаются в заданном положении под действием их собственного веса без фиксирующего устройства. Например, вес колпака 33 может составлять порядка 12 кг. Колпаки 33, как правило, снабжены ручкой 34, чтобы операторы могли манипулировать ими.
Штанга 41 анодов 40, как правило, выступает из системы колпаков через отверстия 32, выполненные для этого в системе колпаков.
В соответствии с наиболее распространенной технологией аноды 40 выполнены из предварительно спеченного углеродистого материала. Постепенное расходование анодов 40 во время реакций электролитического восстановления алюминия требует выполнения работы на электролизерах 3, которая включает, в частности, замену отработанных анодов 40' новыми анодами 40.
Установка 1 содержит модуль 4, так называемый «узел для обслуживания электролизеров», предназначенный для эксплуатации электролизеров 3, то есть для выполнения операций на электролизерах 3, таких как замены анодов или воронок электролизеров 3, предназначенных для подачи дробленого электролита и AlF3. Модуль 4 также может быть использован для выполнения погрузочно-разгрузочных и транспортных операций с различными грузами, такими как элементы электролизных ванн, ковши с жидким металлом или аноды.
Как проиллюстрировано на фиг.1, модуль 4 содержит передвижной кран 5, который имеет две балки 6, проходящие в поперечном направлении, и который выполнен с возможностью перемещения в продольном направлении Х над электролизерами 3. В частности, передвижной кран 5 смонтирован с возможностью его перемещения в продольном направлении на продольных направляющих 7 или путях, которые могут быть предусмотрены вблизи двух поперечных торцевых стен 8 сооружения 2.
Модуль 4 дополнительно содержит каретку 9, смонтированную с возможностью перемещения в поперечном направлении на двух балках 6 передвижного крана 5. Каретка 9 представляет собой компонент машины 10 для обслуживания электролизеров, которая также включает в себя модуль 11 для обслуживания электролизеров, снабженный множеством манипуляционных и обслуживающих устройств 12. Машина 10 для обслуживания электролизеров может также включать в себя кабину управления.
На машинах 10, предназначенных для обслуживания электролизеров и используемых для операций замены анодов, данные манипуляционные и обслуживающие устройства 12 включают в себя инструменты, а именно, как правило, инструмент для разрушения поверхностной корки, ковшеобразную лопату, устройство для захвата анодов (называемое «зажимом для анодов») и воронку, снабженную выдвижной трубой. Инструмент для разрушения поверхностной корки используется для разрушения корки из оксида алюминия и затвердевшего расплава, которая, как правило, покрывает все или часть анодов 40 электролизера 3; ковшеобразная лопата используется для очистки места расположения анода 40 -после извлечения использованного анода - путем удаления твердого вещества, находящегося там, (такого как куски корки и оксида алюминия); зажим для анодов используется для захвата анодов 40 и манипулирования анодами 40 посредством их штанги 41, в частности, для удаления отработанных анодов из электролизера 3 и размещения новых анодов 40 в электролизере 3; выдвижная труба используется для ввода оксида алюминия и/или дробленого электролита в электролизер 3 для образования слоя покрытия после установки нового анода в заданном положении. Инструмент для разрушения поверхностной корки, ковшеобразная лопата и зажим для анодов, как правило, прикреплены к нижнему концу направляющего элемента, такого как стойка или телескопическая рука.
Кроме того, модуль 4 включает в себя систему 50 для выполнения операций, связанных с эксплуатацией электролизеров 3 установки 1, в частности, операций по манипулированию колпаками 33 электролизеров 3 и очистке, по меньшей мере, одной зоны электролизера 3.
Как проиллюстрировано на фиг.4, система 50 содержит опору 51, которая смонтирована на модуле 4 и, более точно, на каретке 9 так, что она может быть перемещена над электролизерами 3. Система 50 дополнительно содержит шарнирно-сочлененную руку 52, смонтированную на опоре 51. Например, рука 52 содержит первый свободный конец 53 и второй конец 54, закрепленный на нижней части опоры 51. Рука может представлять собой шестикоординатный антропоморфный робот. Рука 52 может представлять собой единственную шарнирно-сочлененную руку, смонтированную на опоре 51.
В сущности говоря, опора 51 может быть выполнена с такой конструкцией, что рука 52 может перемещаться по существу вертикально во время работы. Это обеспечивает возможность перевода руки 52 в зону рядом с электролизером 3, когда операция должна быть выполнена на электролизере 3, и удерживания руки 52 в поднятом положении в течение остального времени так, что она не будет мешать другим операциям обслуживания, или так, что любому перемещению модуля 4, несущего систему 50, не будет препятствовать то, что рука 52 может войти в контакт с частью электролизера 3, такой как анодный/«положительный» стояк 47 или опорная конструкция 30. Для этого может быть предусмотрено то, что опора 51 будет содержать телескопическую стойку, проходящую по существу в вертикальном направлении Z.
Система 50 дополнительно содержит устройство 55 для временного хранения, по меньшей мере, одного колпака 33, смонтированное на опоре 51, и в показанном варианте осуществления устройство 56 для хранения инструментов, также смонтированное на опоре 51.
В варианте осуществления, показанном на фиг.4, опора 51 содержит основание 57, на котором с обеспечением фиксации смонтировано следующее: рука 52, устройство 55 для временного хранения, по меньшей мере, одного колпака и устройство 56 для хранения инструментов. В частности, основание 57 может быть смонтировано на нижней части опоры 51 и может быть выполнено с возможностью перемещения в вертикальном направлении относительно верхней части опоры 51, при этом данное вертикальное перемещение осуществляется посредством силового цилиндра 58. Кроме того, основание 57 может включать в себя крыло 65, на котором смонтировано устройство 55 для хранения, и крыло 66, на котором смонтировано устройство 56 для хранения инструментов.
В устройстве 56 для хранения инструментов можно обнаружить различные инструменты, которыми может манипулировать рука 52, и, в частности:
- устройство 60 для захвата, по меньшей мере, одного колпака 33, например, содержащее корпус, предусмотренный с ответвлениями, несущими захватные приспособления 59, такие как чашечные присосы, приводимые в действие, например, посредством пневматической системы;
- и инструмент 63 для очистки, такой как щетка, скребок или сдувающее средство.
Устройство 56 для хранения инструментов выполнено с возможностью приема, по меньшей мере, одного инструмента 60, 63, подаваемого рукой 52, и с возможностью захвата одного из инструментов 60, 63, размещенных в устройстве 56 для хранения, указанной рукой 52. Помимо захватного устройства 60 и инструмента 63 для очистки устройство 56 для хранения может принимать, например, измерительный датчик, измерительные инструменты, средства для очистки щетками, предназначенные для других частей электролизера (анодной рамы, анодных штанг), инструменты для удаления расплава и т.д.
Для этого первый конец 53 руки 52 может быть снабжен первыми соединительными средствами 61, в то время как каждый из инструментов, выполненный с возможностью присоединения к первому концу 53 руки 52, в частности, захватное устройство 60 и инструмент 63 для очистки, может быть снабжен вторыми соединительными средствами 62, выполненными с возможностью взаимодействия с первыми соединительными средствами 61 с возможностью разъединения. В предпочтительном варианте осуществления изобретения вторые соединительные средства 62 являются идентичными для всех из указанных инструментов, в результате чего создается универсальная система соединения.
Соединительные средства 61, 62 предназначены для обеспечения разъемного соединения между первым концом 53 руки 52 и инструментами, в частности, захватным устройством 60 и инструментом 63 для очистки, и для обеспечения автоматического соединения между рукой 52 и инструментами для подвода пневматической и электрической энергии. В случае универсальной системы соединения соединительные средства 61, 62 предпочтительно должны иметь достаточные соединения для каждого инструмента, подлежащего соединению с рукой 52. Кроме того, соединительные средства 61, 62 предпочтительно выполнены с возможностью гарантирования того, что инструменты будут удерживаться на месте в случае прекращения подачи питания.
Функциональное назначение устройства 56 для хранения инструментов состоит в том, чтобы обеспечить возможность хранения инструментов, которые не используются в заданный момент времени. Данные неиспользуемые инструменты предпочтительно зафиксированы на устройстве 56 для хранения, например, посредством силовых цилиндров. Устройство 56 для хранения может содержать несколько элементов 64, составляющих одно целое с крылом 66, присоединенным к основанию 57, при этом каждый из данных элементов 64 служит в качестве основания, на котором неиспользуемый инструмент может быть размещен или зафиксирован.
Устройство 55 для временного хранения, по меньшей мере, одного колпака выполнено с возможностью приема, по меньшей мере, одного колпака 33, переносимого рукой 52, снабженной захватным устройством 60, и предназначено для обеспечения возможности извлечения, по меньшей мере, одного колпака 33, ранее размещенного в устройстве 55 для хранения, указанной рукой 52, снабженной захватным устройством 60.
Устройство 55 для хранения далее будет описано более конкретно со ссылкой на фиг.5-8.
В показанном варианте осуществления устройство 55 для хранения содержит по существу горизонтальное основание 70, первую боковую стойку 71 и вторую боковую стойку 73, по существу вертикальные и зафиксированные относительно основания 70. Первая и вторая боковые стойки 71, 73 могут быть соединены посредством крыла 65, соединяющего устройство 55 для хранения с основанием 57 опоры 51.
Кроме того, по существу вертикальный затвор 72 предусмотрен вблизи второй боковой стойки 73. Затвор 72 выполнен с возможностью перемещения относительно второй боковой стойки 73 между открытым положением, обеспечивающим возможность размещения, по меньшей мере, одного колпака 33 в указанном устройстве 55 для хранения или удаления, по меньшей мере, одного колпака 33 из указанного устройства 55 для хранения, и закрытым положением, в котором колпак (-и) 33 удерживается/удерживаются в указанном устройстве 55 для хранения в положении хранения. В непроиллюстрированном варианте также может быть предусмотрен подвижный затвор вблизи первой боковой стойки 71.
Устройство 55 для хранения предпочтительно не имеет передней панели для обеспечения возможности ввода одного или более колпаков 33 спереди, а также их удаления посредством руки 52. Кроме того, устройство 55 для хранения может не иметь верхней поперечины: другими словами, оно открыто сверху. Кроме того, устройство 55 для хранения может не иметь сплошной задней панели, при этом крыло 65 образует единственный элемент с задней стороны устройства 55 для хранения.
Затвор 72 может быть смещен от второй боковой стойки 73 или приближен ко второй боковой стойке 73 так, что один или более колпаков 33 могут быть захвачены между второй боковой стойкой 73 и затвором 72, в частности, свободным концом затвора 72. В данном положении хранения колпаки 33 удерживаются таким образом между двумя стойками 71, 73 посредством затвора 72.
Таким образом, когда затвор 72 находится в положении вдали от второй стойки 73, то есть когда он находится в открытом положении (фиг.5-8), можно разместить, по меньшей мере, один колпак 33 в устройстве 55 для хранения или удалить, по меньшей мере, один колпак 33 из устройства 55 для хранения. Напротив, когда затвор 72 переведен в положение, в котором он находится ближе ко второй стойке 73, то есть когда он находится в закрытом положении (фиг.4), колпак (-и) 33 удерживается/удерживаются в устройстве 33 для хранения.
В показанном варианте осуществления устройство 55 для хранения содержит приводной элемент, выполненный с возможностью обеспечения перемещения подвижного элемента - а именно затвора 72 - между его открытым и закрытым положениями. Как проиллюстрировано на фиг.6, данный приводной элемент выполнен в виде, по меньшей мере, одного силового цилиндра 75. Силовой цилиндр 75 может быть присоединен к проушине 76, образующей одно целое с затвором 72 и шарнирно присоединенной вокруг по существу вертикальной оси 77 и зафиксированной относительно второй стойки 73. Таким образом, перемещение затвора 72 между его открытым и закрытым положениями включает поворот затвора 72 вокруг оси 77. На силовом цилиндре 75 также может быть предусмотрен концевой выключатель.
Кроме того, первая стойка 71 - и, возможно, вторая стойка 73 и/или затвор 72 - может/могут иметь по существу вертикальную канавку 74, которая открыта по направлению ко второй стойке 73 - или в более общем смысле по направлению к противоположной стойке и в которую должен входить один край, по меньшей мере, одного колпака 33. Как правило, в данные одну или более канавок 74 вставляются верхний и/или нижний края колпака 33, при этом термины «верхний» и «нижний» относятся к положению, занимаемому колпаком 33 на электролизере 3. На практике данная стойка 71 может иметь V-образное поперечное сечение, как показано на фиг.6. Данная конструкция повышает качество позиционирования и удерживания колпаков 33 в устройстве 55 для хранения.
Когда только один колпак 33 находится в положении хранения в устройстве 55 для хранения, он опирается на основание 70 и удерживается между двумя стойками 71, 73 благодаря затвору 72, как проиллюстрировано на фиг.7, при этом его боковые края 36 являются по существу горизонтальными.
Когда несколько колпаков 33 (до трех в варианте осуществления, проиллюстрированном на фиг.8) находятся в положении хранения в устройстве 55 для хранения, нижний колпак 33 опирается на основание 70. Кроме того, колпаки 33 расположены по существу в одной и той же вертикальной плоскости и расположены друг над другом по существу непрерывно вдоль вертикального направления Z. Кроме того, когда колпаки 33 размещены на электролизере 3, их боковые края 36 расположены по существу в плоскости (Х, Z), как показано на фиг.3. Напротив, в положении хранения, подобном показанному на фиг.7 и 8, боковые края 36 колпаков 33 по существу горизонтальны, то есть они были повернуты на 90° относительно положения, которые они занимают, будучи размещенными на электролизере 3.
Кроме того, система 50 может содержать средства для обнаружения наличия, по меньшей мере, одного колпака 33 в устройстве 55 для хранения. Как видно, в частности, на фиг.5, данные средства обнаружения могут содержать один или более пальцеобразных выступов 78, расположенных на основании 70 устройства 55 для хранения, при этом данные пальцеобразные выступы 78 выступают вверх и прижимаются под весом одного или более колпаков 33, размещенных в устройстве 55 для хранения.
Устройство 55 для временного хранения, по меньшей мере, одного колпака 33 предпочтительно является надежным, то есть выполнено с возможностью гарантирования того, что колпаки 33 будут удерживаться на месте даже в случае прекращения подачи питания, что предотвращает их случайное падение.
Рука 52 может быть снабжена цепью 80, обеспечивающей опору для кабелей, (см., в частности, фиг.9), в которой будут смонтированы все кабели и шланги, необходимые для функционирования системы 50. Кроме того, система 50 содержит один или более коробчатых элементов 79, содержащих различные компьютерные и/или пневматические управляющие системы, в частности, для управления системой фиксации колпаков 33 в устройстве 55 для хранения (за счет перемещения затвора 72 в его закрытое положение и удерживания его в данном положении) и фиксацией инструментов 60, 63 в устройстве 56 для хранения инструментов. Системы, размещенные в коробчатом элементе 79, также могут обеспечивать возможность поддержания связи с программируемым контроллером машины 10, предназначенной для обслуживания электролизеров, для приема команд и ретрансляции информации.
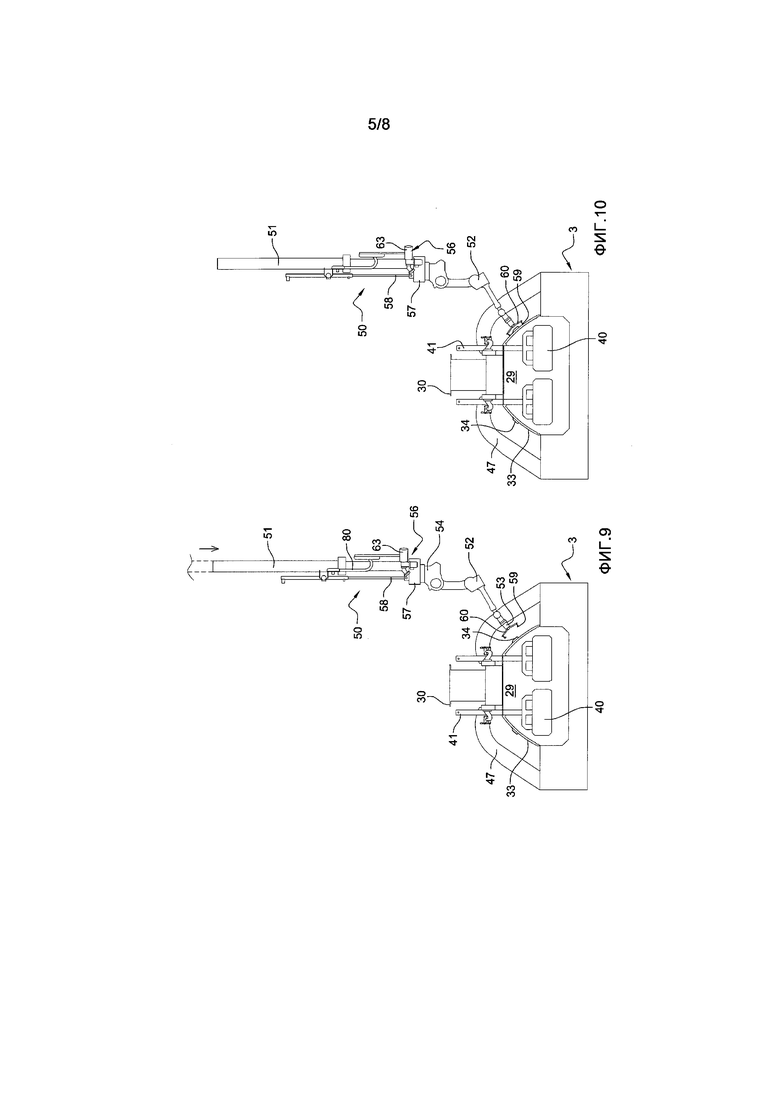
Фиг.9-16 иллюстрируют следующие друг за другом этапы способа воздействия на электролизер 3 установки 1, требующий снятия и последующей повторной установки колпаков 33 электролизера 3. В частности, при замене отработанного анода 40' новым анодом 40 колпаки 33, расположенные перед отработанным анодом 40', должны быть удалены и затем повторно установлены после фиксации нового анода 40.
Как показано на фиг.9, опора 51, которую несет модуль 4, перемещается близко к электролизеру 3, для которого должно осуществляться воздействие, посредством передвижного крана 5 и каретки 9. После этого рука 52 перемещается вниз посредством силового цилиндра 58 телескопической опоры 51 в показанном варианте осуществления до тех пор, пока первый конец 53 руки 52 не окажется расположенным рядом с колпаками 33, подлежащими снятию. Захватное устройство 60 присоединено к данному первому концу 53. Устройство 56 для хранения инструментов содержит, по меньшей мере, инструмент 63 для очистки в очереди.
Рука 52, снабженная захватным устройством 60, захватывает, по меньшей мере, один колпак 33, имеющийся на электролизере 3, как показано на фиг.10. В частности, захватное устройство 60 может быть выполнено с возможностью одновременного захвата трех колпаков или двух колпаков и половины колпака (половины колпаков могут быть расположены, например, на поперечных концах электролизеров 3). В сущности говоря, могут быть предусмотрены три или четыре захватных приспособления 59 на один колпак 33.
Для выполнения этого система может включать в себя датчик, выполненный с возможностью определения точного положения колпака 33 на электролизере 3 перед его захватом рукой 52. Действительно, как указано выше, колпаки 33 могут быть расположены с изменяющимся зазором между ними и/или с угловым дефектом, составляющим несколько градусов относительно осей Х и Y. Определение фактического положения колпака 33 гарантирует отличное позиционирование захватных элементов 59 на колпаке 33 и, следовательно, надежный захват без риска падения.
Точное положение колпака 33 может быть определено, например, путем обнаружения ручки 34 колпака 33 посредством устройства обнаружения.
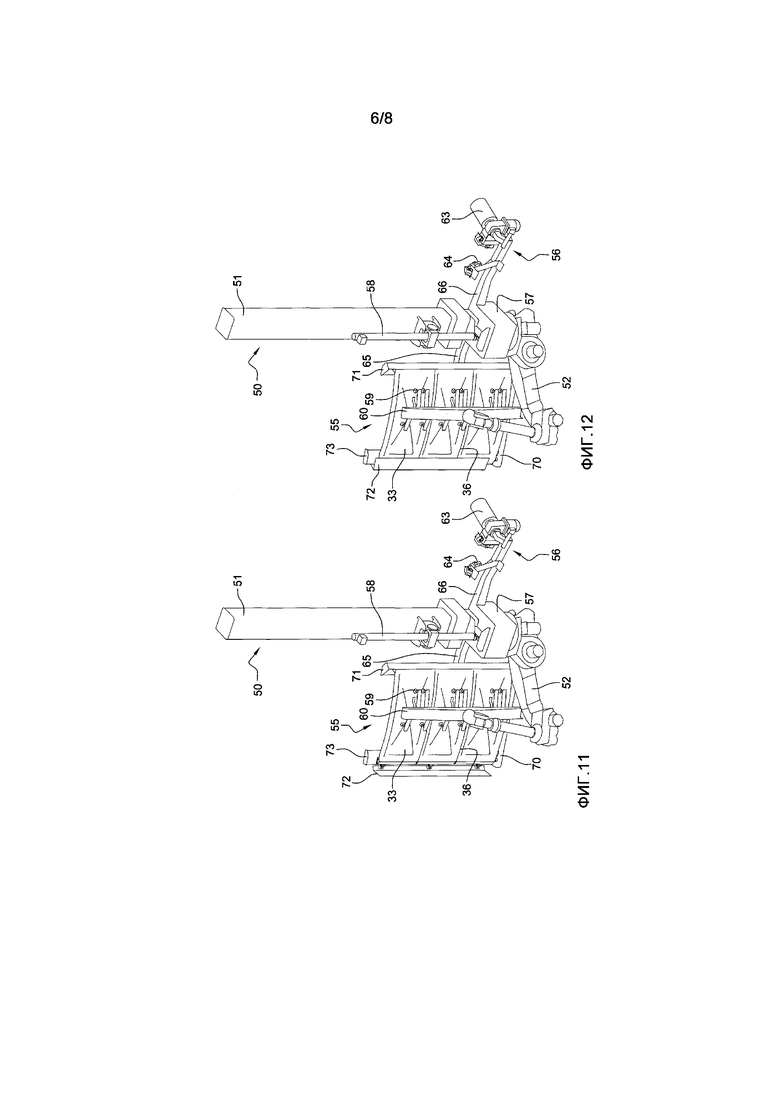
Рука 52, несущая колпаки 33 посредством захватного устройства 60, затем обеспечивает размещение всех данных колпаков 33 в устройстве 55 для хранения, как проиллюстрировано на фиг.11. Для этого колпаки 33 - в данном случае их число равно трем, причем это представляет собой только один пример, - поворачиваются на 90° относительно их положения на электролизере 3, при этом боковые края 36, таким образом, будут по существу горизонтальными, и размещаются рукой 52 в устройстве 55 для хранения через его открытую переднюю часть.
Колпаки 33 размещаются в устройстве 55 для хранения между двумя стойками 71, 73, при этом затвор 72 находится в открытом положении для обеспечения возможности ввода колпаков 33 (фиг.11).
Затем затвор 72 перемещается в его закрытое положение, так что колпаки 33 будут удерживаться между стойками 71, 73 и затвором 72 (фиг.12). После этого захватное устройство 60 может быть отсоединено от колпаков 33 без риска их падения.
Когда колпаки 33 будут сняты с электролизера 3, машина 10 для обслуживания электролизеров может воздействовать на электролизер 3 для выполнения различных операций, в частности, но не исключительно, для замены анода. Во время данных воздействий колпаки 33 удерживаются в отведенном положении и, следовательно, не препятствуют данным воздействиям. В более общем смысле руки 52 и вся система 50 расположены так, чтобы они не препятствовали данным воздействиям. Более конкретно, система 50 может быть поднята (посредством телескопической опоры 51 в описываемом варианте осуществления), и она впоследствии будет опущена, когда снова потребуется ее использование для выполнения других операций.
Рука 52, которая не должна поддерживать колпаки 33, может быть использована для выполнения других операций, как правило, посредством других инструментов. Таким образом, сначала рука 52 освобождается от захватного устройства 60 путем его размещения в устройстве 56 для хранения, как правило, на соответствующем элементе 64.
Затем рука 52 соединяется с инструментом - отличным от захватного устройства 60 - имеющимся в устройстве 56 для хранения посредством взаимодействия между первыми соединительными средствами 61, предусмотренными на первом конце 53 руки 52, и вторыми соединительными средствами 62, предусмотренными на инструменте. После этого рука 52 может использовать данный инструмент для выполнения операции, связанной с эксплуатацией электролизера 3, но отличной от манипулирования колпаками 33.
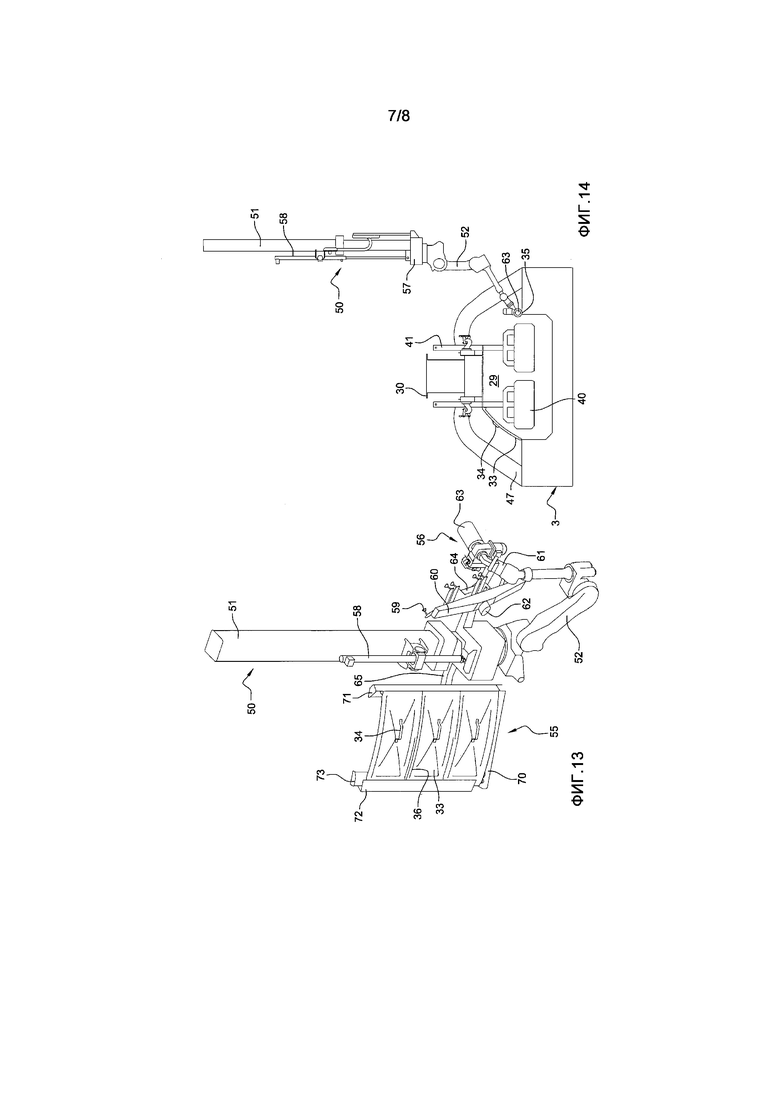
В варианте осуществления, показанном на фиг.13, данный инструмент представляет собой инструмент 63 для очистки, который используется для очистки, по меньшей мере, одной зоны электролизера 3, как показано на фиг.14.
Конкретно, после замены анода и перед установкой колпаков 33 обратно в их заданное положение на электролизере 3 направляющая канавка 35 должна быть очищена вдоль всей длины, не закрытой, когда колпаки 33 сняты, для удаления всех кусков - то есть твердого расплава и обломков дробленого электролита, которые могли упасть во время операции замены анода 40. Для очистки направляющей канавки 35 инструмент 63 для очистки, как правило, может размещать данные куски внутри электролизной ванны 20. Рука 52 предпочтительно должна быть выполнена с конструкцией, обеспечивающей возможность очистки под правым и левым анодными/«положительными» стояками 47 без поворота назад.
Как только операция очистки будет завершена, инструмент 63 для очистки может быть размещен обратно в устройстве 56 для хранения на соответствующем элементе 64, и после этого рука 52 может быть отсоединена от инструмента 63 для очистки.
Затем рука 52 может быть соединена с еще одним инструментом, имеющимся в устройстве 56 для хранения, для выполнения еще одной операции.
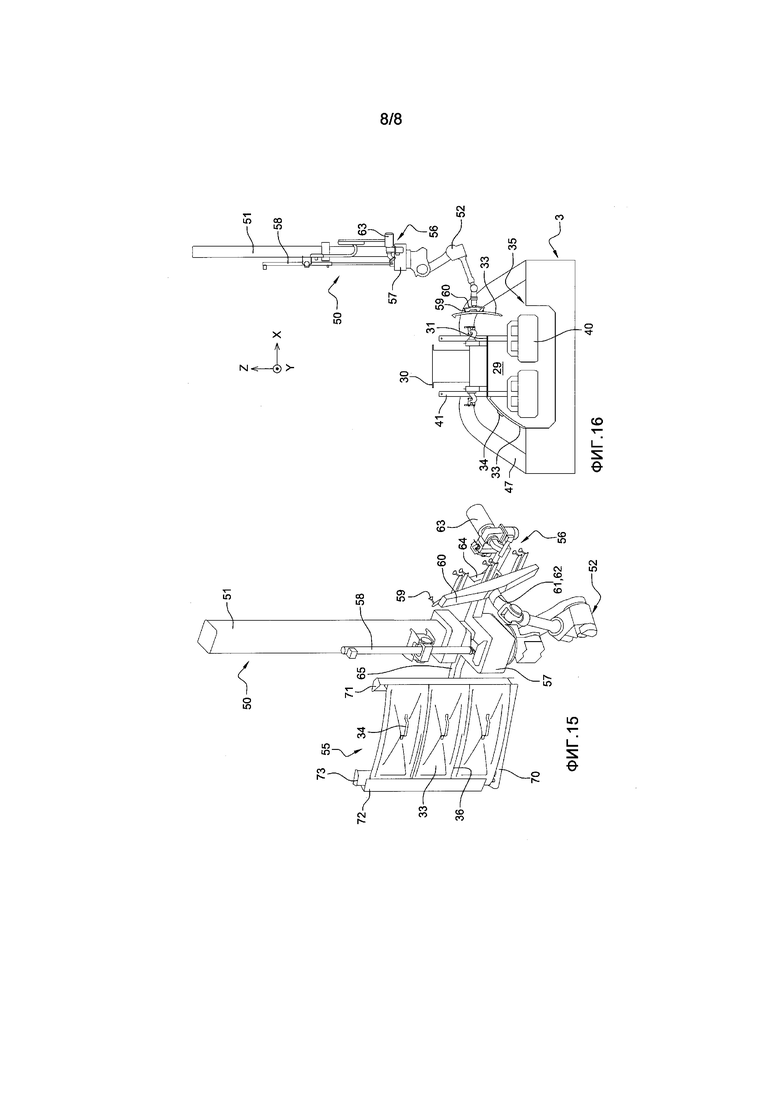
Как проиллюстрировано на фиг.15, рука 52 может извлекать захватное устройство 60, которое она ранее разместила в устройстве 56 для временного хранения, посредством взаимодействия между первыми соединительными средствами 61, предусмотренными на первом конце 53 руки 52, и вторыми соединительными средствами 62, предусмотренными на захватном устройстве 60.
Рука 52, снабженная таким образом захватным устройством 60, может затем извлекать один или более колпаков 33, ранее размещенных в устройстве 55 для хранения. Данная операция не требует устройства, выполненного с возможностью определения точного положения колпаков 33, поскольку они остались в том же базовом положении, в каком находится рука 52, с момента их размещения в устройстве 55 для хранения. Это обеспечивает экономию времени и повышение надежности.
Как только захватные элементы 59 будут соответствующим образом соединены с колпаками 33, затвор 72 устройства 55 для хранения может быть перемещен в его открытое положение для обеспечения возможности удаления колпаков 33 из устройства 55 для хранения.
Затем, как проиллюстрировано на фиг.16, рука 52 перемещается так, что она может повторно установить колпак (-и) 33, которые она удерживает на электролизере 3. Для обеспечения возможности соответствующей повторной установки колпаков 33 в заданном положении система 50 может содержать устройство обнаружения, выполненное с возможностью обнаружения элемента, соседнего с местом электролизера 3, в котором колпаки 33 должны быть повторно установлены в заданном положении рукой 52. Данным соседним элементом может быть, например, соседний колпак 33, уже установленный в заданном положении на электролизере 3, или торцевая стенка электролизера 3 в том случае, когда колпаки, подлежащие повторной установке в заданном положении, представляют собой колпаки, размещаемые на поперечном конце электролизера 3.
Рука 52 вставляет колпаки 33 в направляющую канавку 35, которая была очищена ранее, и размещает их на крае 31 верхней части 30 конструкции.
Поскольку колпаки 33 удерживались, будучи расположенными друг на друге в направлении оси Z, при их по существу горизонтальных боковых краях 36, любой зазор, который может существовать между двумя соседними колпаками 33 перед их снятием с электролизера 3, был скорректирован под действие силы тяжести. Таким образом, габаритный размер - вдоль оси Y - всех колпаков 33, подлежащих размещению обратно на электролизере 3, будет меньше габаритных размеров данного комплекта колпаков 33 перед их снятием с электролизера 3. Другими словами, место на электролизере 3, доступное для повторной установки колпаков 33, будет больше по размеру по сравнению с размером данного комплекта колпаков 33 вдоль оси Y. Повторная установка колпаков 33 на электролизере значительно облегчается.
Процесс, описанный выше, может выполняться автоматически, при этом система 50 будет работать независимо после того, как машина 10 для обслуживания электролизеров, расположенная над электролизером 3, выдаст команду инициирования цикла.
Альтернативно, в особенности для выполнения регулировок может быть предусмотрена ручная операция, при этом операция выполняется оператором, воздействующим на органы управления, имеющиеся в кабине машины 10 для обслуживания электролизеров.
Таким образом, система в соответствии с изобретением обеспечивает возможность манипулирования колпаками и выполнения других операций (очистки и т.д.) в очень «заполненной» среде, окружающей электролизеры, и с требуемой точностью.
Благодаря ее модульности время цикла работы системы может быть значительно уменьшено, например, может составлять менее 100 секунд (захват колпаков, очистка и повторная установка колпаков).
Поскольку система является компактной, она может выполнять определенные операции в качестве фоновой задачи при условии, что они не создают риска столкновения с элементом машины для обслуживания электролизеров. Это, в частности, справедливо для замены инструментов при замене захватного устройства на инструмент для очистки и наоборот, которая может быть выполнена, пока машина 10 для обслуживания электролизеров воздействует на электролизер 3 для разрушения поверхностной корки расплава, удаления отработанного анода или установки нового анода.
Помимо влияния на финансы, уменьшение длительности цикла предпочтительно с точки зрения безопасности и окружающей среды, поскольку время, в течение которого колпаки будут сняты с электролизеров, уменьшается.
Совершенно очевидно, что изобретение не ограничено вариантом осуществления, описанным выше в качестве примера, но включает в себя все технические эквиваленты и варианты описанных средств и их комбинаций.
Изобретение относится к устройству для эксплуатации электролизера установки для производства алюминия огневым электролизом. Устройство, выполненное с возможностью монтажа на подвижном модуле установки и перемещения над электролизером, содержит опору для ее монтажа на модуле, шарнирный манипулятор, смонтированный на опоре, устройство для захвата по меньшей мере одного колпака, выполненное с возможностью присоединения к первому концу манипулятора, и устройство для временного хранения по меньшей мере одного колпака, при этом устройство для хранения, смонтированное на опоре, выполнено с возможностью приема по меньшей мере одного колпака, перемещенного манипулятором, снабженным захватным устройством, и извлечения по меньшей мере одного колпака, ранее размещенного в устройстве для хранения, манипулятором, снабженным захватным устройством. Раскрыты модуль для эксплуатации электролизера установки для производства алюминия огневым электролизом, установка для производства алюминия огневым электролизом и способ воздействия на электролизер установки для производства алюминия огневым электролизом. Обеспечивается эксплуатационная гибкость системы при очень хороших условиях работы. 4 н. и 16 з.п. ф-лы, 16 ил.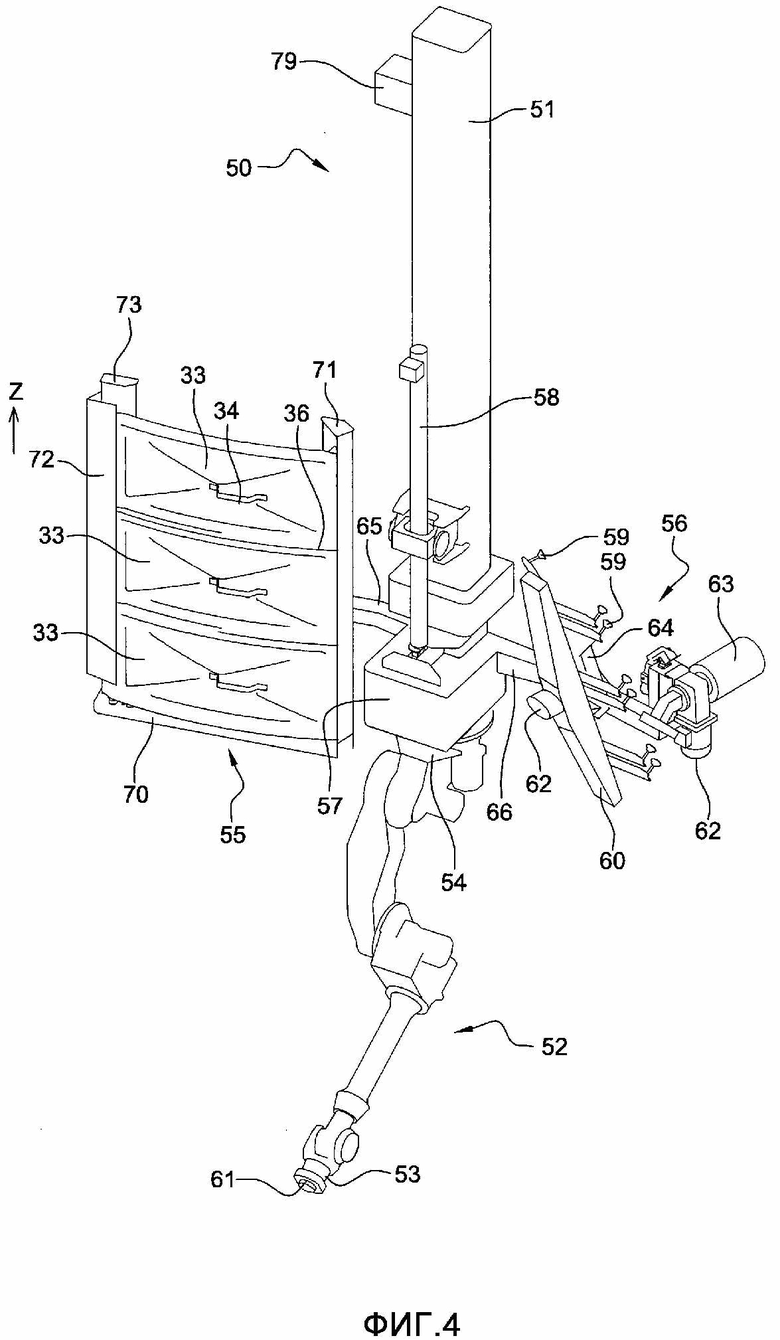
1. Устройство для манипулирования колпаками газоотводящего укрытия электролизеров установки для производства алюминия огневым электролизом и очистки по меньшей мере одной зоны электролизеров, выполненное с возможностью его монтажа на подвижном модуле установки для производства алюминия огневым электролизом с возможностью перемещения над электролизером, содержащее:
- опору, выполненную с возможностью монтажа на упомянутом модуле,
- шарнирный манипулятор,
- захватное устройство для захвата по меньшей мере одного колпака, выполненное с возможностью присоединения к первому концу шарнирного манипулятора,
отличающееся тем, что оно содержит устройство для временного хранения по меньшей мере одного колпака, смонтированное на упомянутой опоре с возможностью приема по меньшей мере одного колпака, перемещаемого шарнирным манипулятором с захватным устройством, и возможностью извлечения по меньшей мере одного колпака, ранее размещенного в устройстве для хранения.
2. Устройство по п. 1, отличающееся тем, что оно дополнительно снабжено смонтированным на опоре устройством для хранения инструментов, включающим по меньшей мере захватное устройство и инструмент для очистки, выполненным с возможностью приема по меньшей мере одного инструмента, подаваемого шарнирным манипулятором, и захвата одного из инструментов, размещенных в устройстве для хранения, указанным шарнирным манипулятором.
3. Устройство по п. 1 или 2, отличающееся тем, что оно содержит единственный шарнирный манипулятор, смонтированный на опоре.
4. Устройство по любому из пп. 1-3, отличающееся тем, что упомянутая опора содержит основание, на котором с возможностью фиксации смонтированы шарнирный манипулятор, устройство для временного хранения по меньшей мере одного колпака и при необходимости дополнительное устройство для хранения инструментов.
5. Устройство по любому из пп. 1-4, отличающееся тем, что первый конец шарнирного манипулятора снабжен первыми соединительными средствами, причем захватное устройство или любой другой инструмент, который может быть присоединен к первому концу шарнирного манипулятора, снабжено вторыми соединительными средствами, выполненными с возможностью взаимодействия с первыми соединительными средствами с возможностью разъединения.
6. Устройство по любому из пп. 1-5, отличающееся тем, что упомянутое устройство для временного хранения по меньшей мере одного колпака выполнено с возможностью приема множества колпаков, размещаемых по существу в одной и той же вертикальной плоскости с расположенными по существу горизонтально боковыми краями, при этом колпаки будут расположены друг над другом по существу непрерывно в вертикальном направлении (Z).
7. Устройство по любому из пп. 1-6, отличающееся тем, что упомянутое устройство для временного хранения по меньшей мере одного колпака содержит элемент, выполненный с возможностью перемещения между открытым положением для ввода по меньшей мере одного колпака в указанное устройство для хранения или для удаления по меньшей мере одного колпака из указанного устройства для хранения и закрытым положением, в котором колпак удерживается в указанном устройстве (55) для хранения.
8. Устройство по п. 7, отличающееся тем, что упомянутое устройство для хранения содержит приводной элемент, выполненный с возможностью обеспечения перемещения подвижного элемента между его открытым и закрытым положениями.
9. Устройство по любому из пп. 1-8, отличающееся тем, что упомянутое устройство для хранения содержит горизонтальное основание, первую и вторую боковые стойки, выполненные вертикальными и зафиксированные относительно основания и вблизи по меньшей мере одной из двух боковых стоек, вертикальный затвор, выполненный с возможностью перемещения относительно указанной боковой стойки между открытым положением, обеспечивающим возможность ввода по меньшей мере одного колпака в указанное устройство для хранения или вывода по меньшей мере одного колпака из указанного устройства для хранения, и закрытым положением, в котором колпак удерживается в указанном устройстве для хранения в положении хранения.
10. Устройство по п. 9, отличающееся тем, что по меньшей мере одна из указанных стоек имеет канавку, выполненную вертикально и открытую по направлению к другой стойке, в которую должен входить один край по меньшей мере одного колпака.
11. Устройство по любому из пп. 1-10, отличающееся тем, что оно содержит средства для обнаружения наличия по меньшей мере одного колпака в устройстве для хранения.
12. Устройство по любому из пп. 1-11, отличающееся тем, что оно содержит устройство обнаружения, выполненное с возможностью определения точного положения колпака на электролизере перед его захватом манипулятором и выполненное с возможностью обнаружения элемента рядом с местом электролизера, в котором колпак должен быть повторно установлен манипулятором в заданном положении для обеспечения возможности надлежащей повторной установки указанного колпака в заданном положении.
13. Устройство по любому из пп. 1-12, отличающееся тем, что опора содержит по меньшей мере один компонент, выполненный с возможностью перемещения в вертикальном направлении при обслуживании и на котором смонтирован шарнирный манипулятор, зафиксированный его вторым концом на нижней части опоры.
14. Устройство по любому из пп. 1-13, отличающееся тем, что опора содержит телескопическую стойку, проходящую в вертикальном направлении (2).
15. Устройство по любому из пп. 1-13, отличающееся тем, что шарнирный манипулятор представляет собой шестикоординатный антропоморфный робот.
16. Модуль для манипулирования колпаками газоотводящего укрытия электролизеров установки для производства алюминия огневым электролизом и очистки по меньшей мере одной зоны электролизеров, содержащий:
- передвижной кран, содержащий две балки, проходящие в поперечном направлении, и выполненный с возможностью перемещения в продольном направлении (X) над электролизером,
- каретку, смонтированную с возможностью перемещения в поперечном направлении на двух балках передвижного крана,
отличающийся тем, что он дополнительно содержит устройство по любому из пп. 1-15, при этом опора упомянутого устройства смонтирована на упомянутой каретке.
17. Установка для производства алюминия огневым электролизом, содержащая:
- сооружение, в котором размещены электролизеры, каждый из которых расположен в поперечном направлении (Y), причем электролизеры расположены рядом друг с другом в продольном направлении (X),
- модуль для манипулирования колпаками газоотводящего укрытия электролизеров установки для производства алюминия огневым электролизом по п. 16, при этом передвижной кран модуля смонтирован с возможностью перемещения в продольном направлении на продольных направляющих, предусмотренных вблизи двух поперечных торцевых стен сооружения.
18. Способ манипулирования колпаками газоотводящего укрытия электролизеров установки для производства алюминия огневым электролизом и очистки по меньшей мере одной зоны электролизеров с использованием устройства по одному из пп. 1-3, включающий следующие последовательные этапы:
a) захват по меньшей мере одного колпака, имеющегося на электролизере, посредством шарнирного манипулятора, смонтированного на опоре и снабженного захватным устройством для захвата по меньшей мере одного колпака,
b) размещение посредством указанного манипулятора в устройстве для временного хранения по меньшей мере одного колпака, смонтированного на опоре, и последующее разъединение устройства для захвата колпака и для освобождения манипулятора,
с) извлечение манипулятором по меньшей мере одного колпака, ранее размещенного в устройстве (55) для хранения,
d) повторное размещение указанного колпака на электролизере посредством указанного манипулятора.
19. Способ по п. 18, отличающийся тем, что он дополнительно включает между этапами b) и с) следующие этапы:
- посредством манипулятора размещают захватное устройство в устройстве для хранения инструментов, смонтированном на опоре,
- присоединяют к указанному манипулятору инструмент, отличный от захватного устройства, имеющийся в устройстве для хранения,
- выполняют операцию указанным инструментом,
- помещают указанный инструмент обратно в устройство для хранения,
- присоединяют захватное устройство обратно к указанному манипулятору.
20. Способ по п. 19, отличающийся тем, что указанный инструмент, отличный от захватного устройства, представляет собой инструмент для очистки, причем операция, выполняемая указанным инструментом, представляет собой операцию очистки по меньшей мере одной зоны электролизера.
| US 8273223 B2, 25.09.2012 | |||
| US 3935090 A, 27.01.1976 | |||
| Крутонаклонный ленточный конвейер | 1977 |
|
SU618313A1 |
| US 4136003 A, 23.01.1979 | |||
| US 6153066 A, 28.11.2001 | |||
| Устройство для электромагнитного контроля механических свойств движущихся ферромагнитных материалов | 1979 |
|
SU1101726A2 |
| Устройство для механизированной замены анодов в электролизере для получения алюминия | 1988 |
|
SU1623569A3 |
| RU 94006777 A1, 24.02.1994. | |||

